Application of the Feedback Linearization in Maximum Power Point Tracking Control for Hydraulic Wind Turbine

Abstract
:1. Introduction
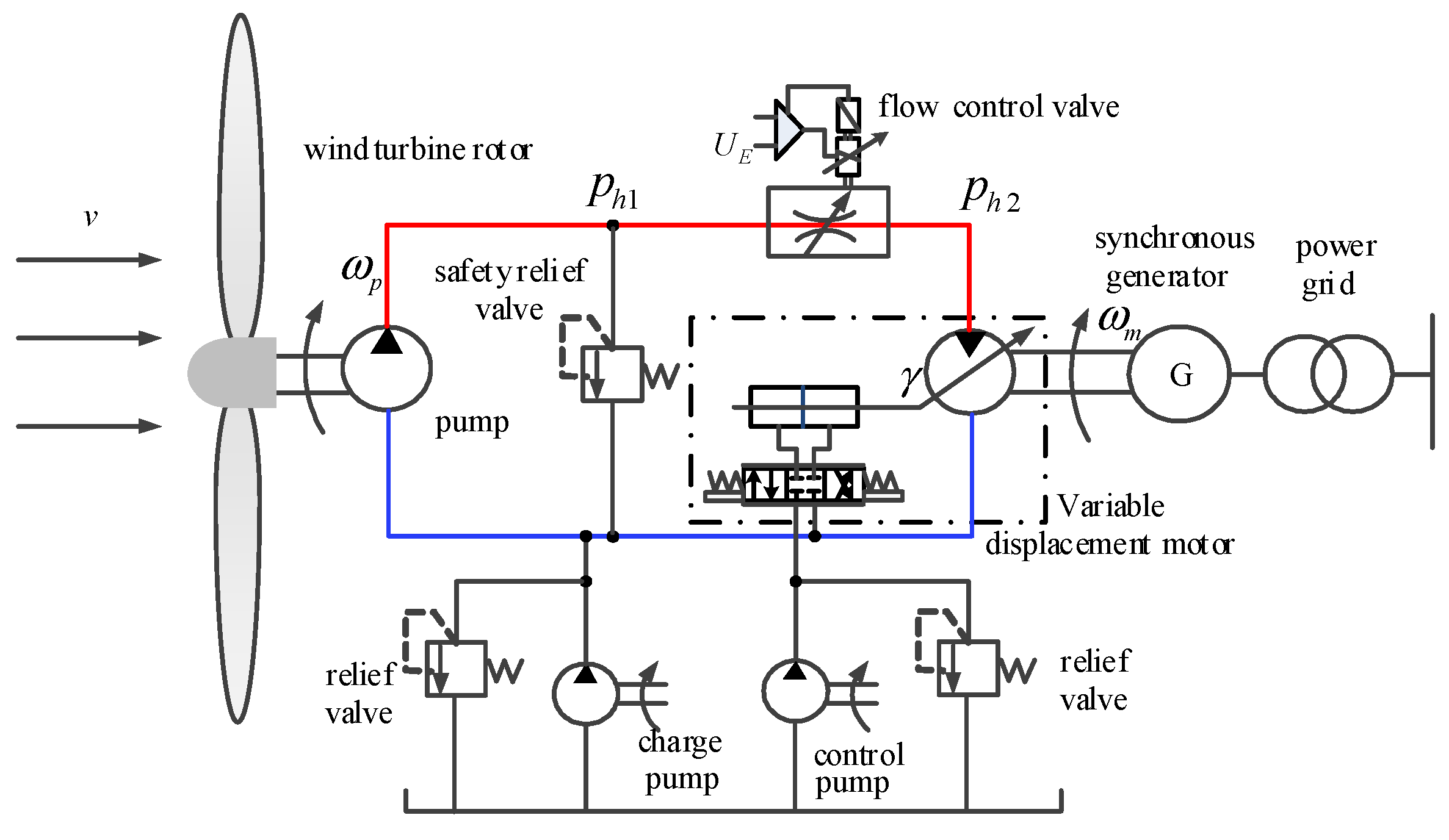
2. Description of the HWT
2.1. HWT Working Principle
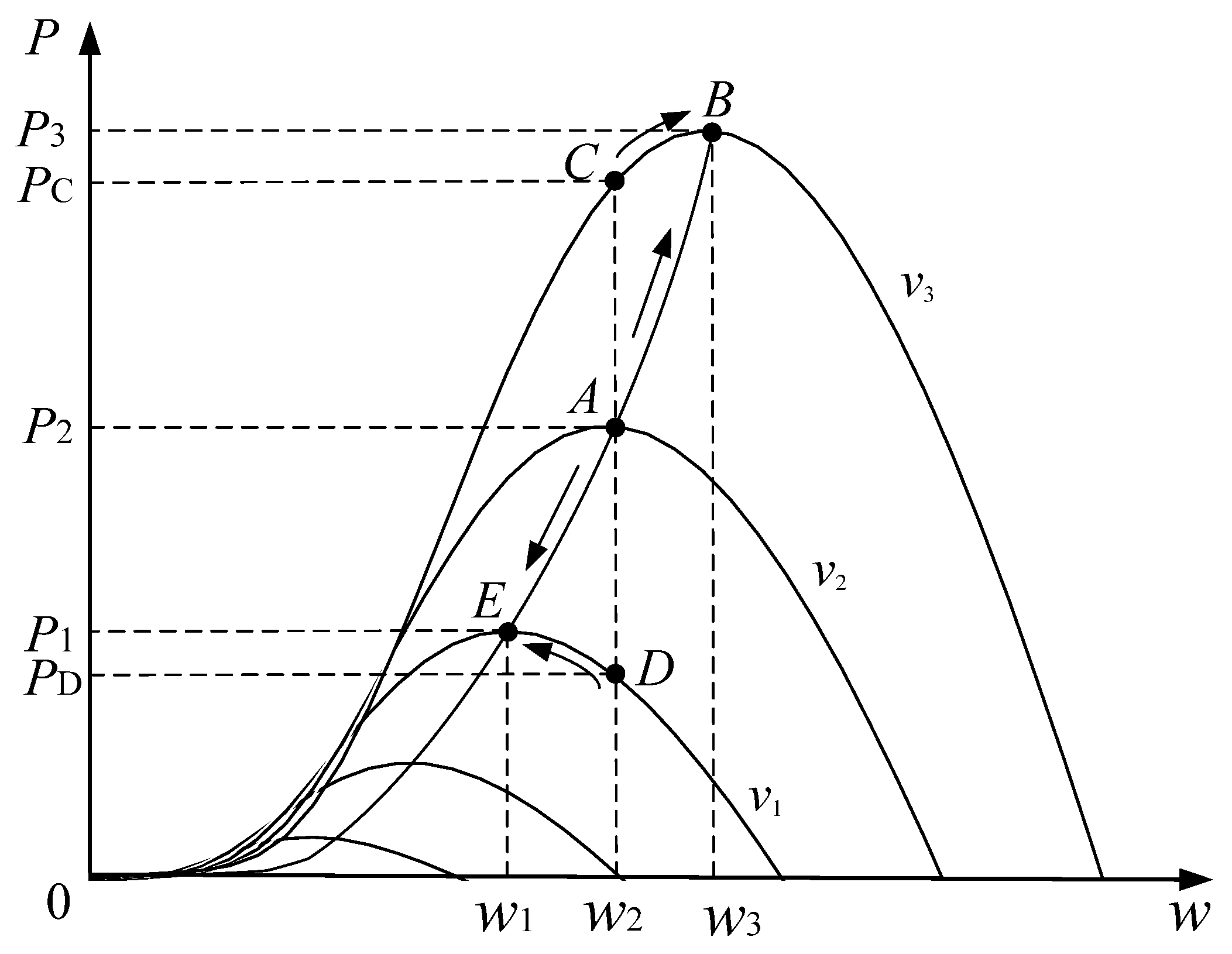
2.2. Control Effects of MPPT
3. The Mathematical Model of the Hydraustatic Transmission
3.1. The Pump Model
3.2. The Motor Model
3.3. The Flow Control Valve Model
3.4. The Hose Model
3.5. The Hydraulic Transmission System State Space Model
- (1)
- The pressure in the low-pressure line is a constant.
- (2)
- The leakage coefficient, the viscous damping coefficient and the bulk modulus of the oil are the fixed values, which do not change with temperature or other factors.
- (3)
- The pressure loss in the hydraulic lines is ignored.
- (4)
- The pump mechanical efficiency is designed 1.
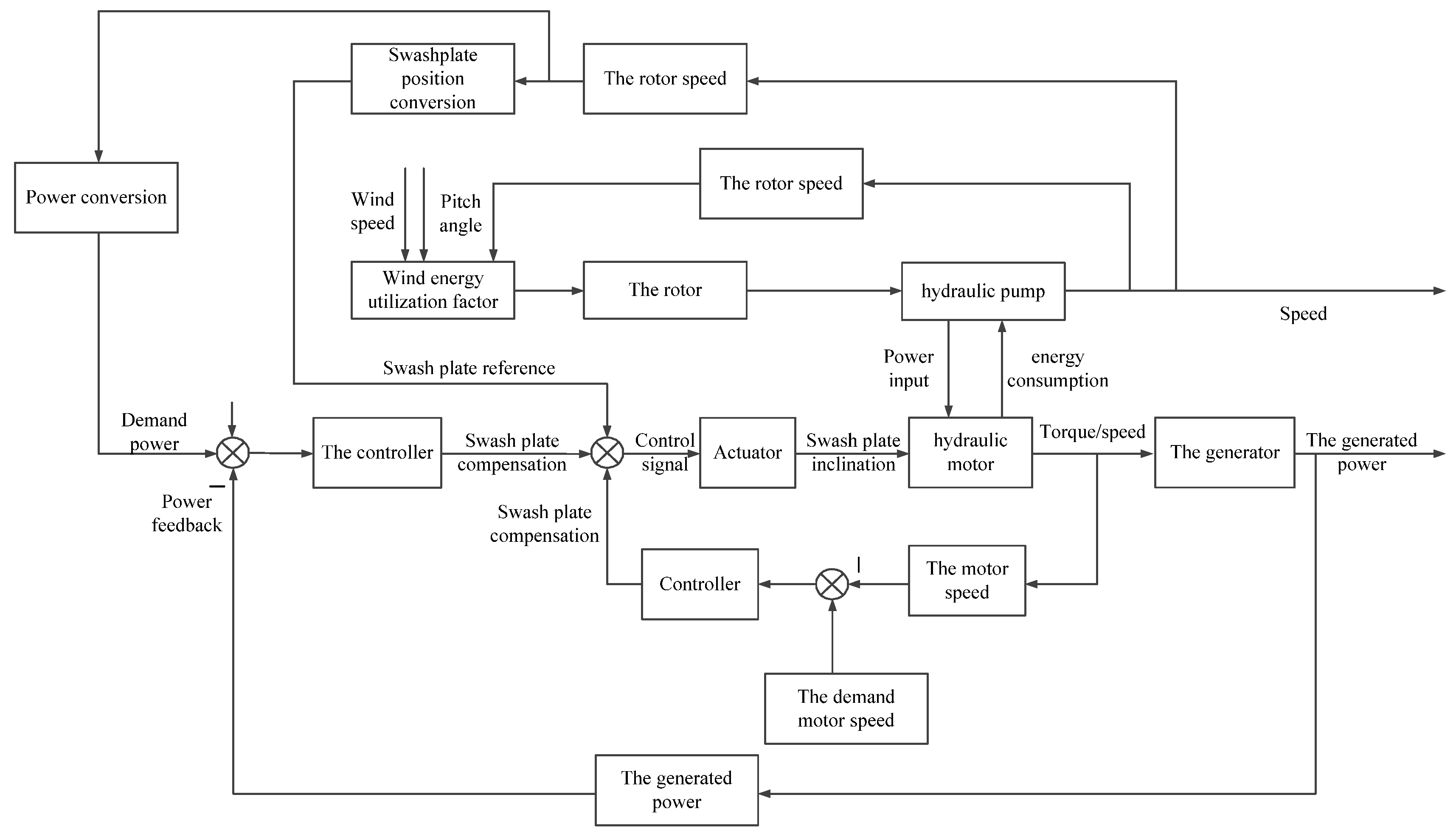
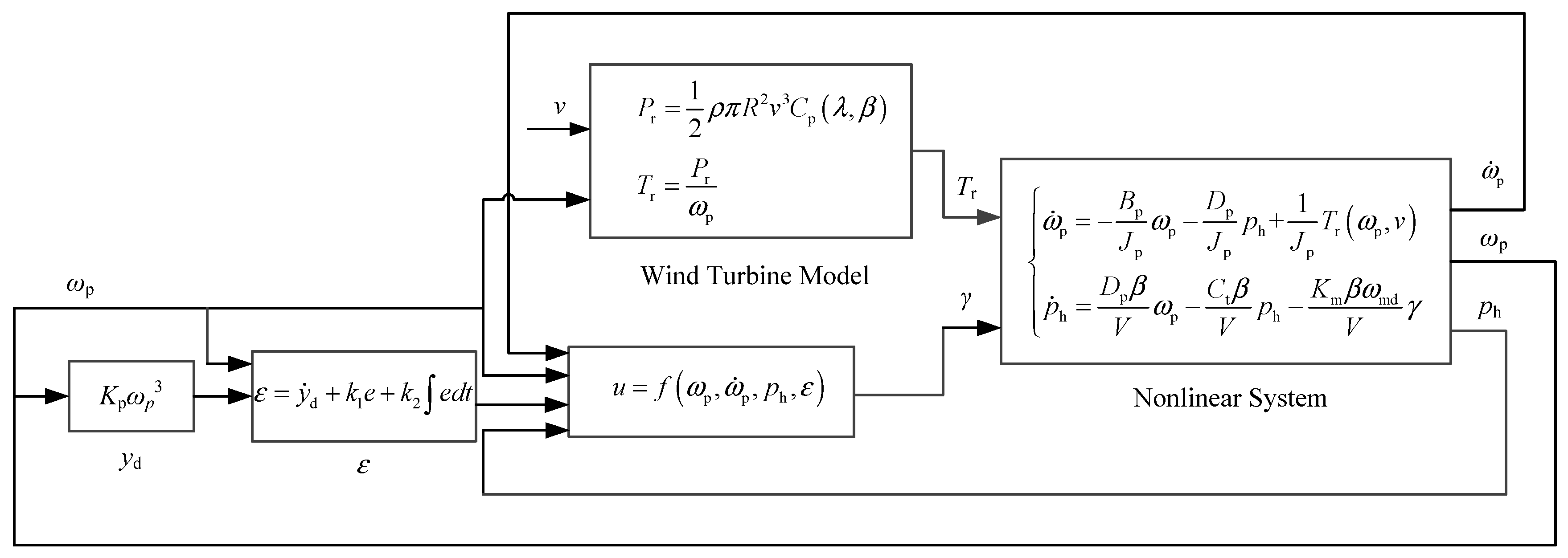
4. The MPPT Controller Based on Feedback Linearization Method
4.1. Control Thoughts
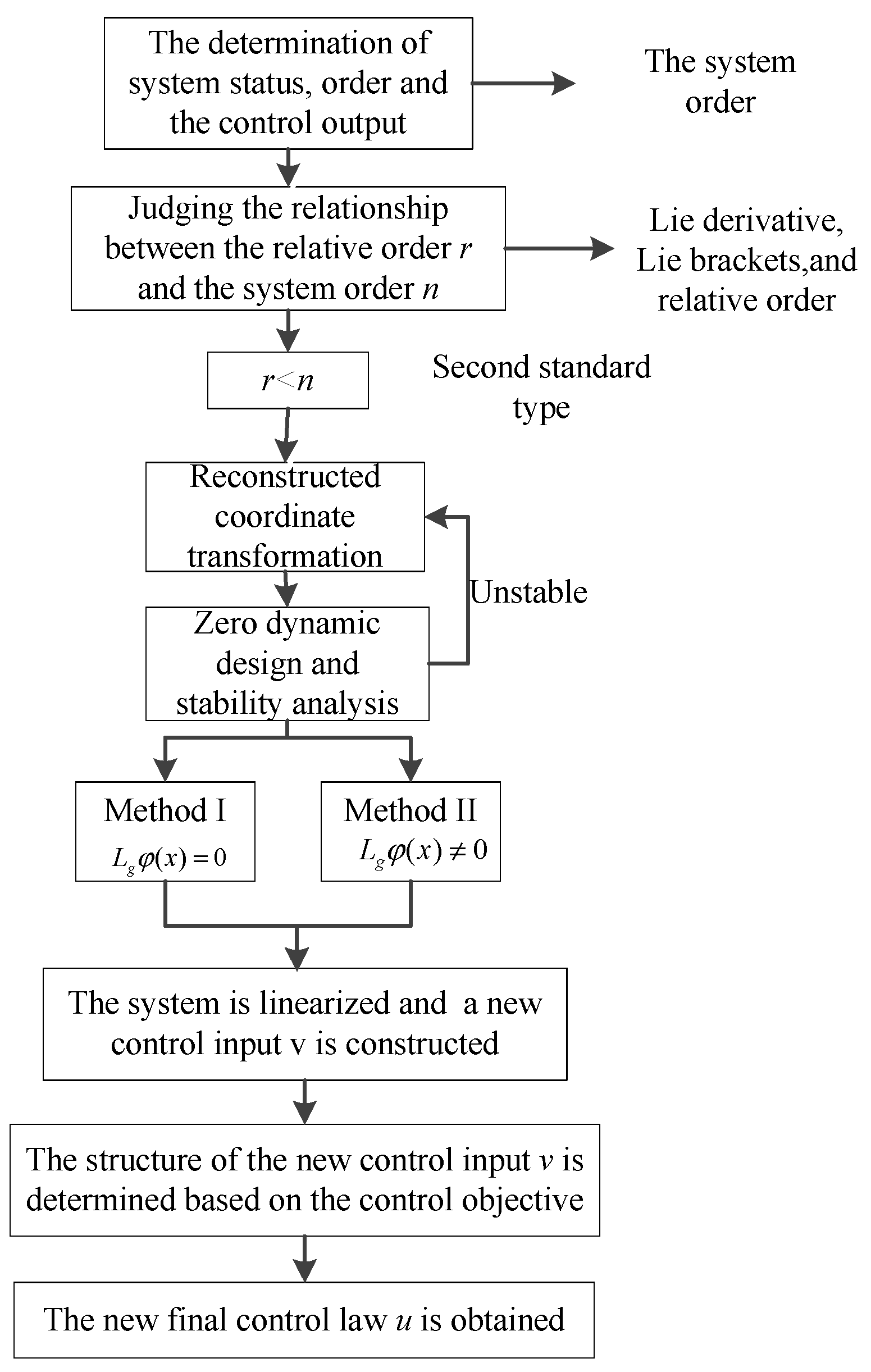
4.2. MPPT Controller Design
4.2.1. Control Output
4.2.2. Relative Order
4.2.3. Zero Dynamic Controller Design
4.2.4. Output Reference Design
4.2.5. Controller Design
5. Simulation and Experiment Research
5.1. Simulation Platform
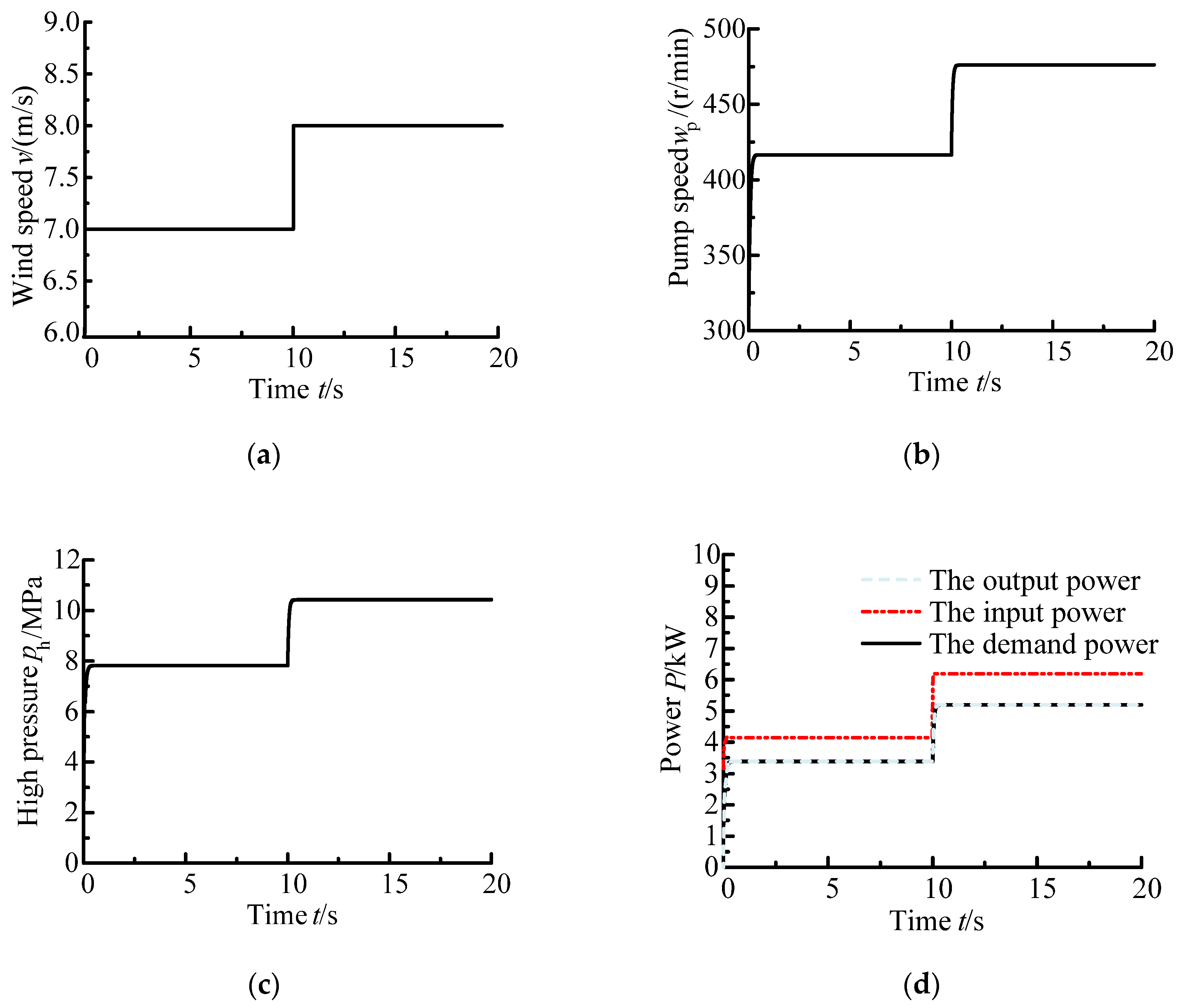
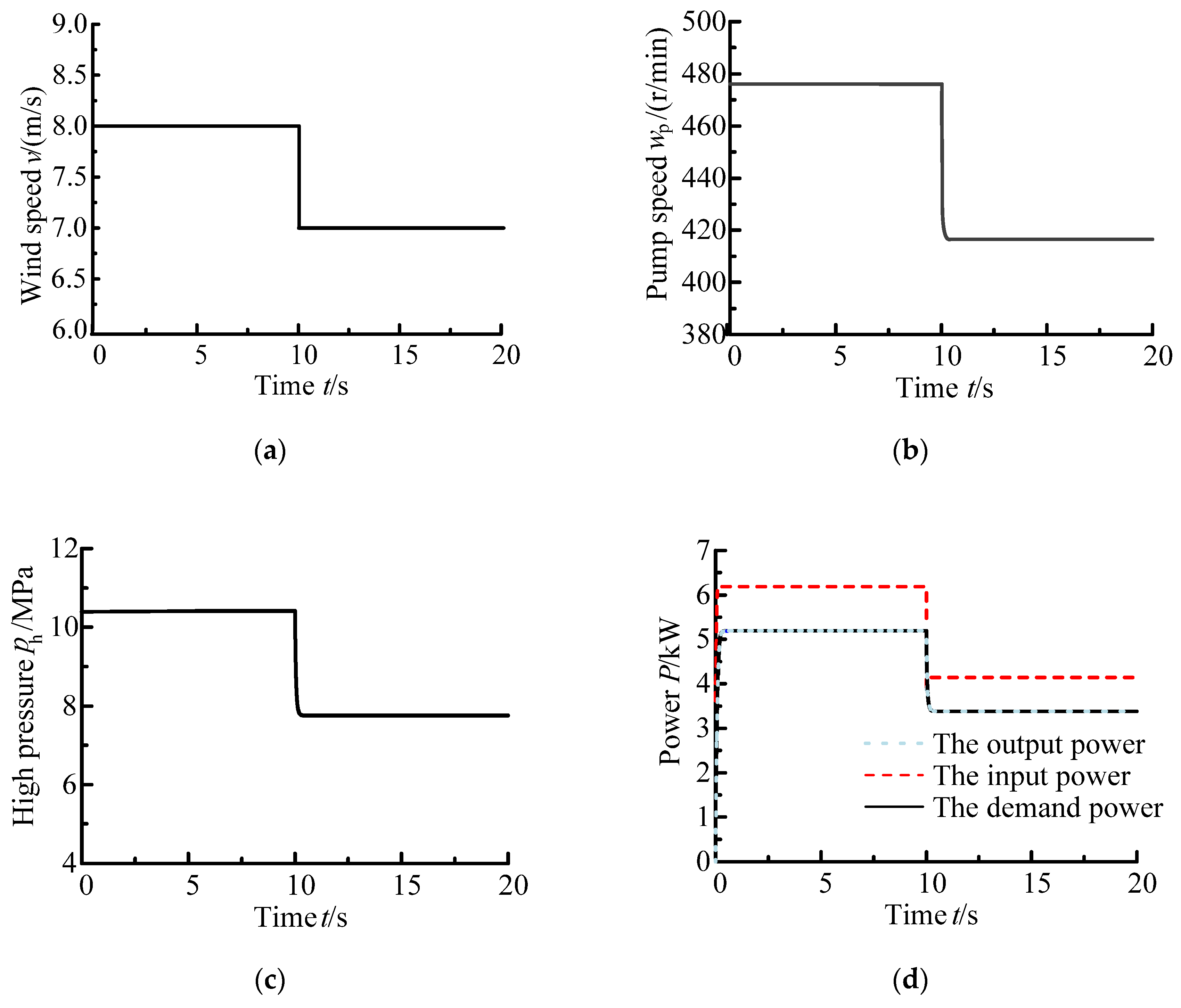
5.2. Simulation Analysis
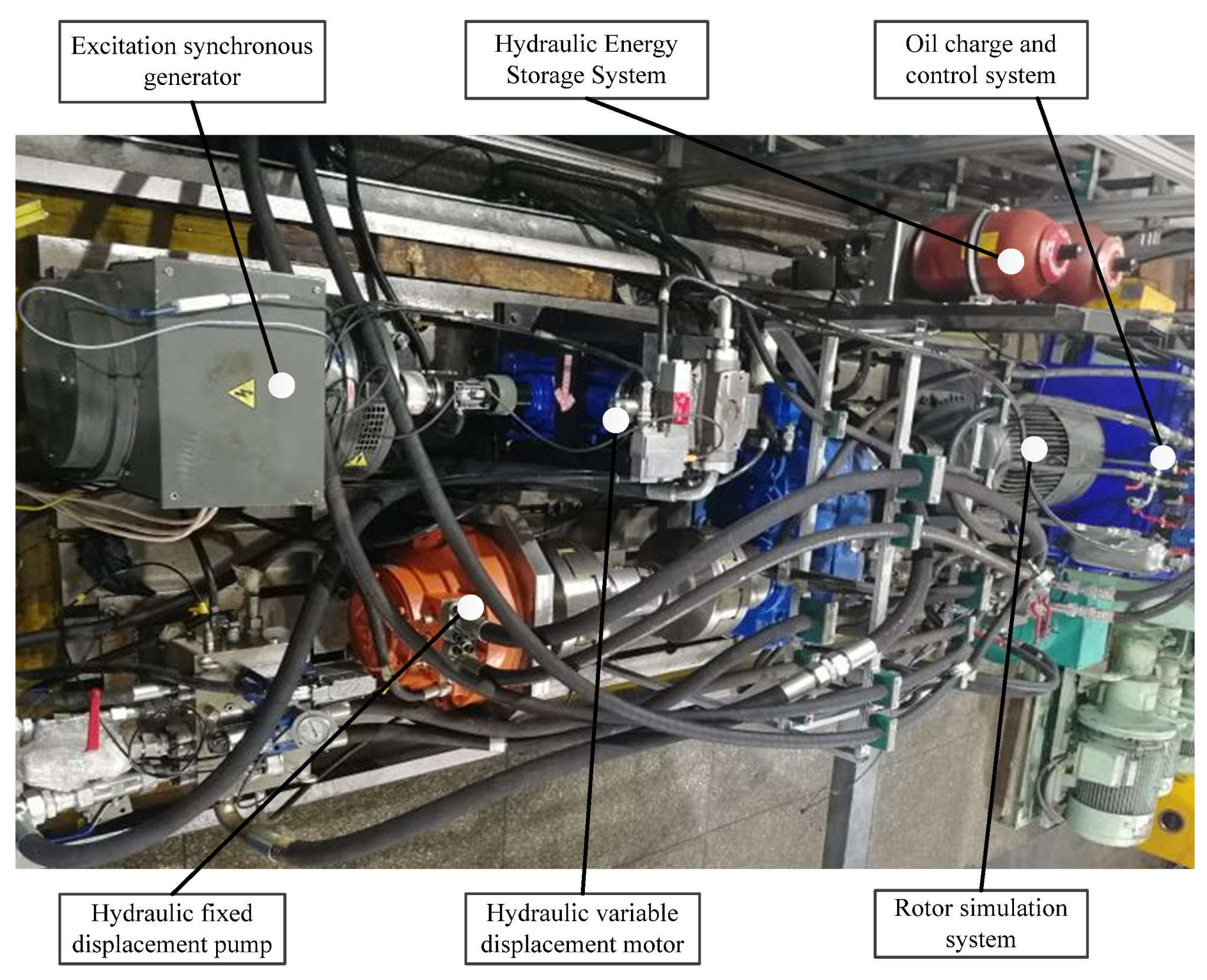
5.3. Experiment Platform
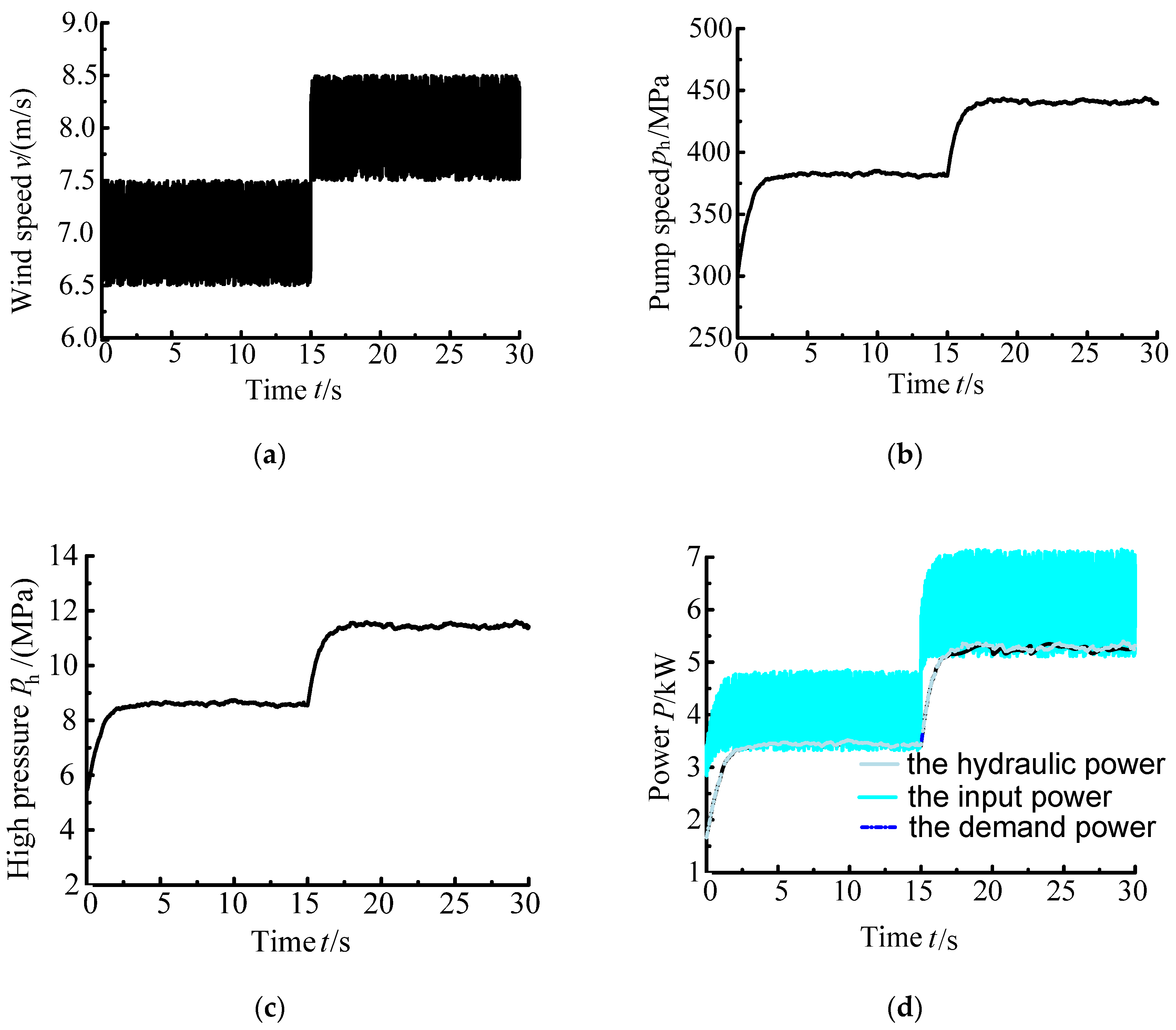
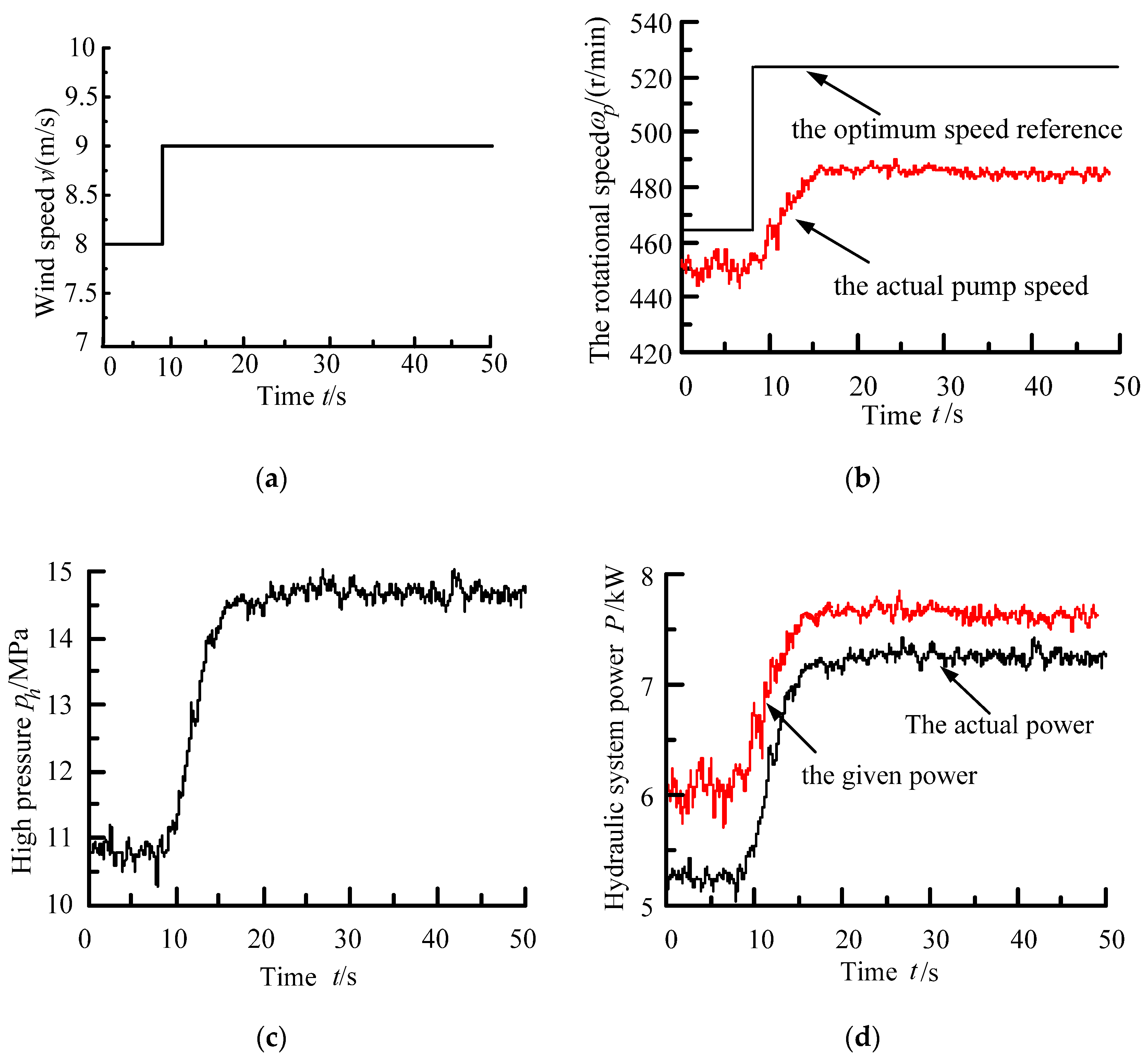
5.4. Experiment Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Variable Symbol | Variable Specification |
| The optimal power coefficient, | |
| Maximum wind power absorbed by the rotor | |
| The air density | |
| The radius of a rotor blade | |
| The wind speed | |
| The maximum coefficient of wind energy utilize | |
| The wind turbine speed | |
| The optimum tip speed ratio | |
| The maximum wind power coefficient | |
| The pump torque | |
| The pump displacement | |
| The pressure difference between the pump suction and discharge lines | |
| The constant pump mechanical efficiency, which is assumed to be unity | |
| The rotor pneumatic torque | |
| The pump moment of inertia | |
| The pump speed | |
| The pump viscous damping coefficient | |
| The pump flow rate | |
| The pump leakage coefficient | |
| The motor torque | |
| The motor displacement | |
| The pressure difference between the motor suction and discharge lines | |
| The motor mechanical efficiency, which is assumed to be 1 | |
| The motor maximum displacement | |
| The motor swing angle, ranging from 0 to 1 | |
| The motor load torque | |
| The proportional flow valve flow rate | |
| The proportional coefficient | |
| The voltage signal | |
| The flow rate caused by the oil compression. | |
| The pressure-affected oil volume | |
| The effective oil bulk modulus including a correction for hose expansion | |
| The motor moment of inertia | |
| The motor speed | |
| The motor viscous damping coefficient | |
| The motor flow rate | |
| The motor leakage coefficient | |
| The compressibility flow between the pump and the flow control valve | |
| The compressibility flow between the motor and the flow control valve | |
| The state variable 1 | |
| The state variable 2 | |
| The demand motor speed | |
| The state variable after coordinate transformation 1 | |
| The state variable after coordinate transformation 2 | |
| The error | |
| The system control input | |
| The system control output | |
| The system controller | |
| The control parameter 1 | |
| The control parameter 2 |
References
- Wei, J.; Sun, W.; Guo, A.; Wang, L. Analysis of wind turbine transmission system considering bearing clearance and thermo-mechanical coupling. In Proceedings of the World Non-Grid-Connected Wind Power Energy Conference, Nanjing, China, 24–26 September 2009; pp. 1–5. [Google Scholar]
- Liu, Z.G.; Yang, G.L.; Wei, L.J.; Yue, D. Variable speed and constant frequency control of hydraulic wind turbine with energy storage system. Adv. Mech. Eng. 2017, 9, 1–10. [Google Scholar] [CrossRef]
- Stelson, K.A. Saving the world’s energy with fluid power. In Proceedings of the 8th JFPS Int. Symp. Fluid Power, Okinawa, Japan, 25–28 October 2011; pp. 1–7. [Google Scholar]
- Jiang, Z.; Yang, L.; Gao, Z.; Moan, T. Numerical simulation of a wind turbine with a hydraulic transmission system. Energy Procedia. 2014, 53, 44–55. [Google Scholar] [CrossRef] [Green Version]
- Pedersen, N.H.; Johansen, P.; Andersen, T.O. Optimal control of a wind turbine with digital fluid power transmission. Nonlinear Dyn. 2018, 91, 591–607. [Google Scholar] [CrossRef]
- Yin, X.; Tong, X.; Zhao, X.; Karcanias, A. Maximum Power Generation Control of a Hybrid Wind Turbine Transmission System Based on H∞ Loop-Shaping Approach. IEEE Trans. Sustain. Energy 2019. [Google Scholar] [CrossRef] [Green Version]
- Ai, C.; Bai, W.; Zhang, T.; Kong, X. Research on the key problems of MPPT strategy based on active power control of hydraulic wind turbines. J. Renew. Sustain. Energy 2019, 11, 013301. [Google Scholar] [CrossRef]
- Yin, X.; Zhao, X. Sensor-less Maximum Power Extraction Control of a Hydrostatic Tidal Turbine Based on Adaptive Extreme Learning Machine. IEEE Trans. Sustain. Energy 2019, 11, 426–435. [Google Scholar] [CrossRef]
- Do, H.T.; Dang, T.D.; Truong, H.V.A.; Ahn, K.K. Maximum power point tracking and output power control on pressure coupling wind energy conversion system. IEEE Trans. Ind. Electron. 2018, 65, 1316–1324. [Google Scholar] [CrossRef]
- Farbood, M.; Sha-Sadeghi, M.; Izadian, A.; Niknam, T. Advanced Model Predictive MPPT and Frequency Regulation in Interconnected Wind Turbine Drivetrains. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), IEEE, Portland, OR, USA, 23–27 September 2018; pp. 3658–3663. [Google Scholar]
- Li, S.; Shi, Y.; Li, J.; Cao, W. Maximum power point tracking control using combined predictive controller for a wind energy conversion system with permanent magnet synchronous generator. In Proceedings of the 2018 33rd Youth Academic Annual Conference of Chinese Association of Automation (YAC), IEEE, Nanjing, China, 18–20 May 2018; pp. 642–647. [Google Scholar]
- Mulders, S.P.; Diepeveen, N.F.B.; van Wingerden, J.W. Extremum Seeking Control for optimization of a feed-forward Pelton turbine speed controller in a fixed-displacement hydraulic wind turbine concept. J. Phys. Conf. Series. IOP Publ. 2019, 1222, 012015. [Google Scholar] [CrossRef]
- Deldar, M.; Izadian, A.; Anwar, S. A decentralized multivariable controller for hydrostatic wind turbine drivetrain. Asian J.Control. 2019. [Google Scholar] [CrossRef]
- Wang, F.; Chen, J.; Xu, B.; Stelson, K.A. Improving the reliability and energy production of large wind turbine with a digital hydrostatic drivetrain. Appl. Energy 2019, 251, 113309. [Google Scholar] [CrossRef]
- Ai, C.; Wu, C.; Zhao, F.; Kong, X. Optimal power tracking control of a hydraulic wind turbine based on the active disturbance rejection control. Trans. Can. Soc. Mech. Eng. 2019. [Google Scholar] [CrossRef]
- Akbari, R.; Izadian, A.; Weissbach, R. An Approach in Torque Control of Hydraulic Wind Turbine Powertrains. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), IEEE, Baltimore, MD, USA, 29 September–3 October 2019; pp. 979–982. [Google Scholar]
- Wei, L.; Zhan, P.; Liu, Z.; Tao, Y.; Yue, D. Modeling and analysis of maximum power tracking of a 600 kw hydraulic energy storage wind turbine test rig. Processes 2019, 7, 706. [Google Scholar] [CrossRef] [Green Version]
- Alberto, I. Nonlinear Control Systems II; Athenaeum Press Ltd.: Gateshead, UK, 1999. [Google Scholar]
- Kong, X.D.; Ai, C.; Wang, J. A summary on the control system of hydrostatic drive train for wind turbines. Chin. Hydraul. Pneum. 2013, 1, 1–7. [Google Scholar]
- Ai, C.; Chen, L.J.; Kong, X.D. Characteristics simulation for hydraulic wind turbine. China Mach. Eng. 2015, 26, 1527–1531. [Google Scholar]
- Jiang, Z.H.; Yu, X.W. Modeling and control of an integrated wind power generation and energy storage system. In Proceedings of the Power Energy Soc. General Meeting, Calgary, AB, Canada, 26–30 July 2009; pp. 1–8. [Google Scholar]
- Wang, J.H. Advanced Nonlinear Control Theory and Its Application; Beijing Science Press: Beijing, China, 2012. [Google Scholar]
- Sreenath, K.; Park, H.W.; Poulakakis, I.; Grizzle, J.W. A compliant hybrid zero dynamics controller for stable, efficient and fast bipedal walking on MABEL. Int. J. Rob. Res. 2011, 30, 1170–1193. [Google Scholar] [CrossRef] [Green Version]
- Bharadwaj, S.; Rao, A.V.; Kenneth, D.M. Entry trajectory tracking law via feed-back linearization. J. Guid. Control Dyn. 1998, 21, 726–732. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Parameter Symbol | Value |
|---|---|---|
| 1 | 6 | |
| 2 | 4 |
| Parameter Symbol | Parameter Name | Value | Unit |
|---|---|---|---|
| the viscous damping coefficient of hydraulic pump | 0.4 | N.m.s/rad | |
| the displacement of hydraulic pump | 1 × 10−5 | m3/rad | |
| the inertia of hydraulic pump | 400 | kg/m3 | |
| the displacement gradient of variable displacement motor | 5.366 × 10−6 | m3/rad | |
| the viscous damping coefficient of variable displacement motor | 0.0345 | N.m.s/rad | |
| the inertia of hydraulic motor | 0.462 | kg/m3 | |
| the bulk modulus of hydraulic oil | 743 × 106 | Pa | |
| the total leakage coefficient of hydraulic pump and variable displacement motor | 6.28 × 10−12 | m3/(s.Pa) | |
| the volume of oil affected by pressure effect in hydraulic hose | 2.8 × 10−3 | m3 | |
| the output power of wind turbine | 24 | kW | |
| R | radius of wind turbine | 7.48 | m |
| the maximum coefficient of wind energy utilized | 0.4496 | ||
| the optimal tip speed ratio | 22.77 |
| Serial Number | Name | Model |
|---|---|---|
| 1 | variable frequency motor | yvp250m-4 |
| 2 | speed torque sensor | jn338a |
| 3 | hydraulic fixed displacement pump | a2f63r2p3 |
| 4 | pressure sensor | zq-bz-1/hk/m20 |
| 5 | pressure gauge | yn-63-i-31.5 |
| 6 | relief valve | db10a-1-b30/315 |
| 7 | check valve | s20p1.0b |
| 8 | accumulator | sb330-10a1/112a9-330a |
| 9 | variable displacement motor | a4vso40ds1/10w-ppb13t013z |
| 10 | excitation synchronous generator | wf200-24 |
| 11 | vane pump | pfe-41085 |
| 12 | relief valve | agm20-a-20/100y |
| 13 | relief valve | agm20-a-20/315y |
| 14 | constant pressure variable pump | 63pcy14-1b |
| 15 | relief valve | dbds10g10b/25/2 |
| 16 | air cooler | ok-el5s/3.1/m/a/1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ai, C.; Gao, W.; Hu, Q.; Zhang, Y.; Chen, L.; Guo, J.; Han, Z. Application of the Feedback Linearization in Maximum Power Point Tracking Control for Hydraulic Wind Turbine. Energies 2020, 13, 1529. https://doi.org/10.3390/en13061529
Ai C, Gao W, Hu Q, Zhang Y, Chen L, Guo J, Han Z. Application of the Feedback Linearization in Maximum Power Point Tracking Control for Hydraulic Wind Turbine. Energies. 2020; 13(6):1529. https://doi.org/10.3390/en13061529
Chicago/Turabian StyleAi, Chao, Wei Gao, Qinyu Hu, Yankang Zhang, Lijuan Chen, Jiawei Guo, and Zengrui Han. 2020. "Application of the Feedback Linearization in Maximum Power Point Tracking Control for Hydraulic Wind Turbine" Energies 13, no. 6: 1529. https://doi.org/10.3390/en13061529
APA StyleAi, C., Gao, W., Hu, Q., Zhang, Y., Chen, L., Guo, J., & Han, Z. (2020). Application of the Feedback Linearization in Maximum Power Point Tracking Control for Hydraulic Wind Turbine. Energies, 13(6), 1529. https://doi.org/10.3390/en13061529