Study on Optimization of Active Control Schemes for Considering Transient Processes in the Case of Pipeline Leakage


Abstract
:1. Introduction
1.1. Background
1.2. Related Work
1.3. Contributions of This Work
- This paper analyzes the process of oil leaks and determines the most sensitive time-control region.
- Aiming at minimiaing leakage volume, a mixed-integer linear programming (MILP) method featuring emergence response is established by virtue of discrete time expression.
- Constraints like transient characteristic, hydraulic equipment’s mutual influence and elevation difference are taken into consideration.
- A method of interval linearization is proposed to shorten the solution time and improve the optimality of the solution.
- A real-world pipeline leak accident in China is cited as a case study. A detailed emergency response scheme and an optimal one are compared in terms of the leakage volume.
1.4. Paper Organization
2. Problem Description
2.1. Control Scheme of Hydraulic Pipeline System under Leak Condition
2.2. Equation of Transient Characteristic
2.3. Model Requirements
- Physical property: density, viscosity, water hammer wave speed
- Pipeline’s fundamental information: diameter, length, hydraulic friction coefficient
- Hydraulic equipment parameter: location, hydraulic coefficient, original state
- Pipeline’s original state: flow rate and pressure at nodes
- Information about leak point: location, size of leak aperture, outer pressure of leak point
- Control scheme of hydraulic equipment
- Hydraulic state parameters in the equipment-influence phase
- Total leakage volume in the study horizon
- The ambient pressure is constant since the pressure change outside leak aperture is so slight that it can be ignored.
- The temperature will slightly drop with the leak, hence, the influence of temperature is neglected.
3. Mathematical Formulations
3.1. Objective Function
3.2. Delivery Constraints
4. Model Solving
5. Results and Discussion
5.1. Model Parameter Setting
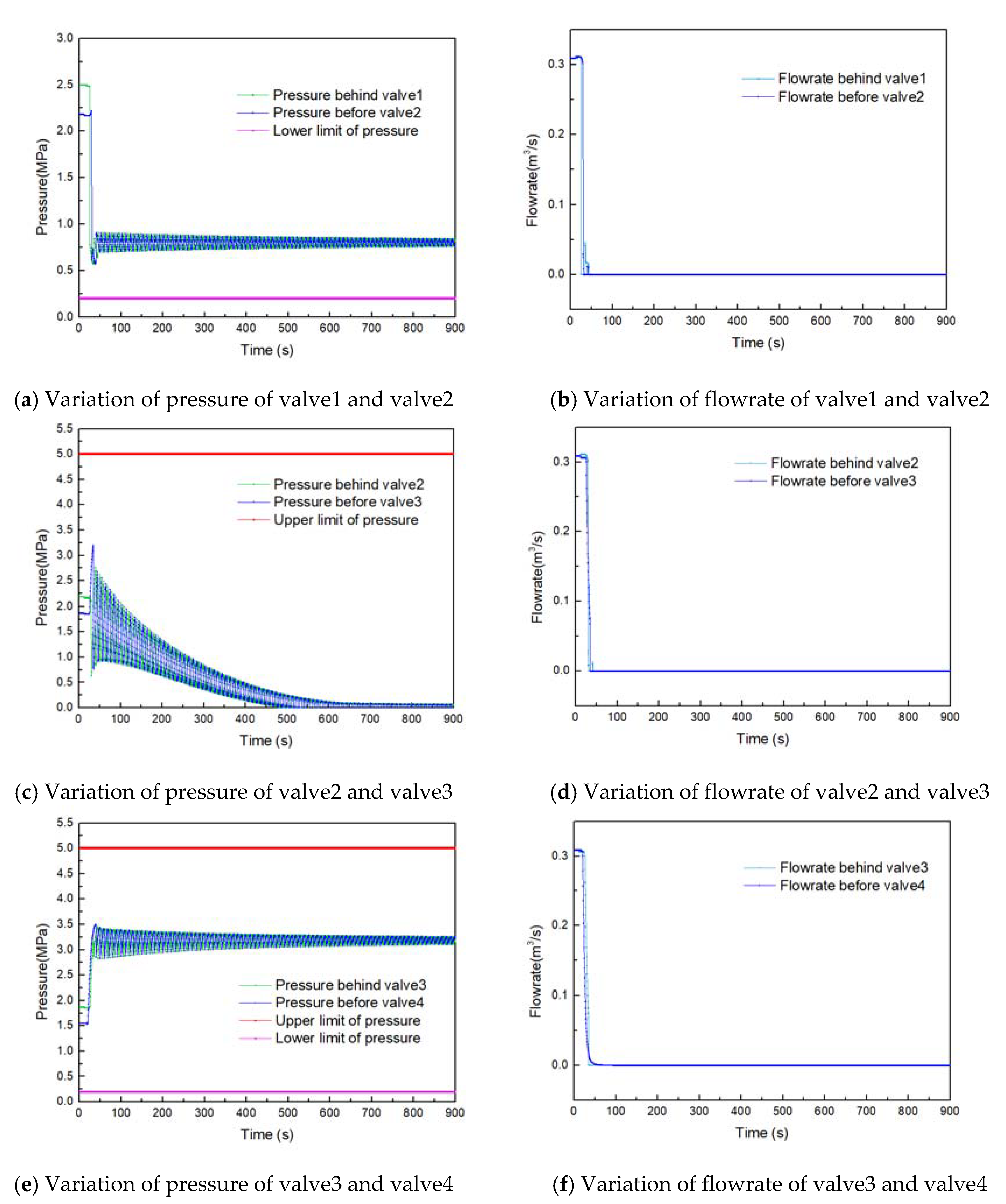
5.2. Model Test
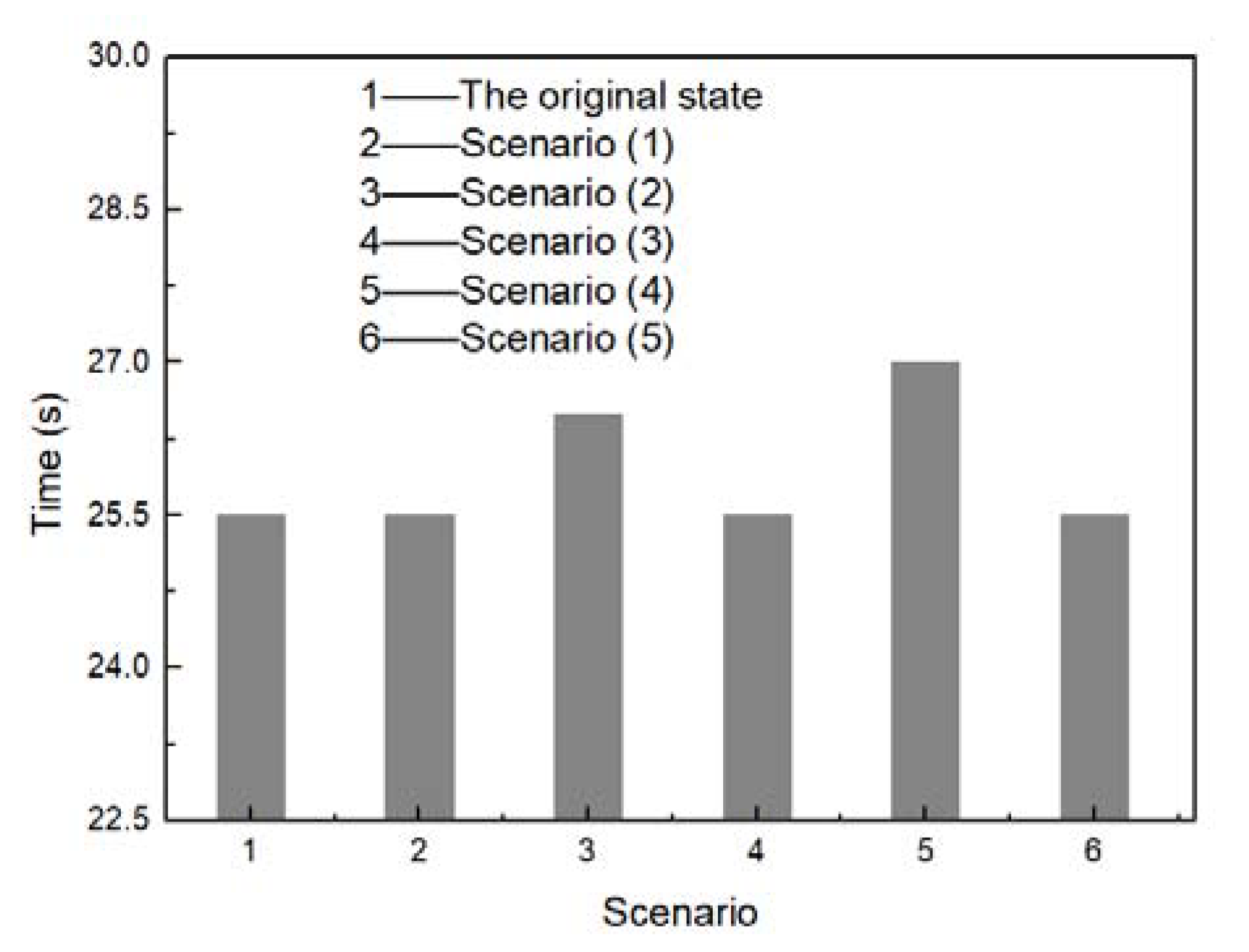
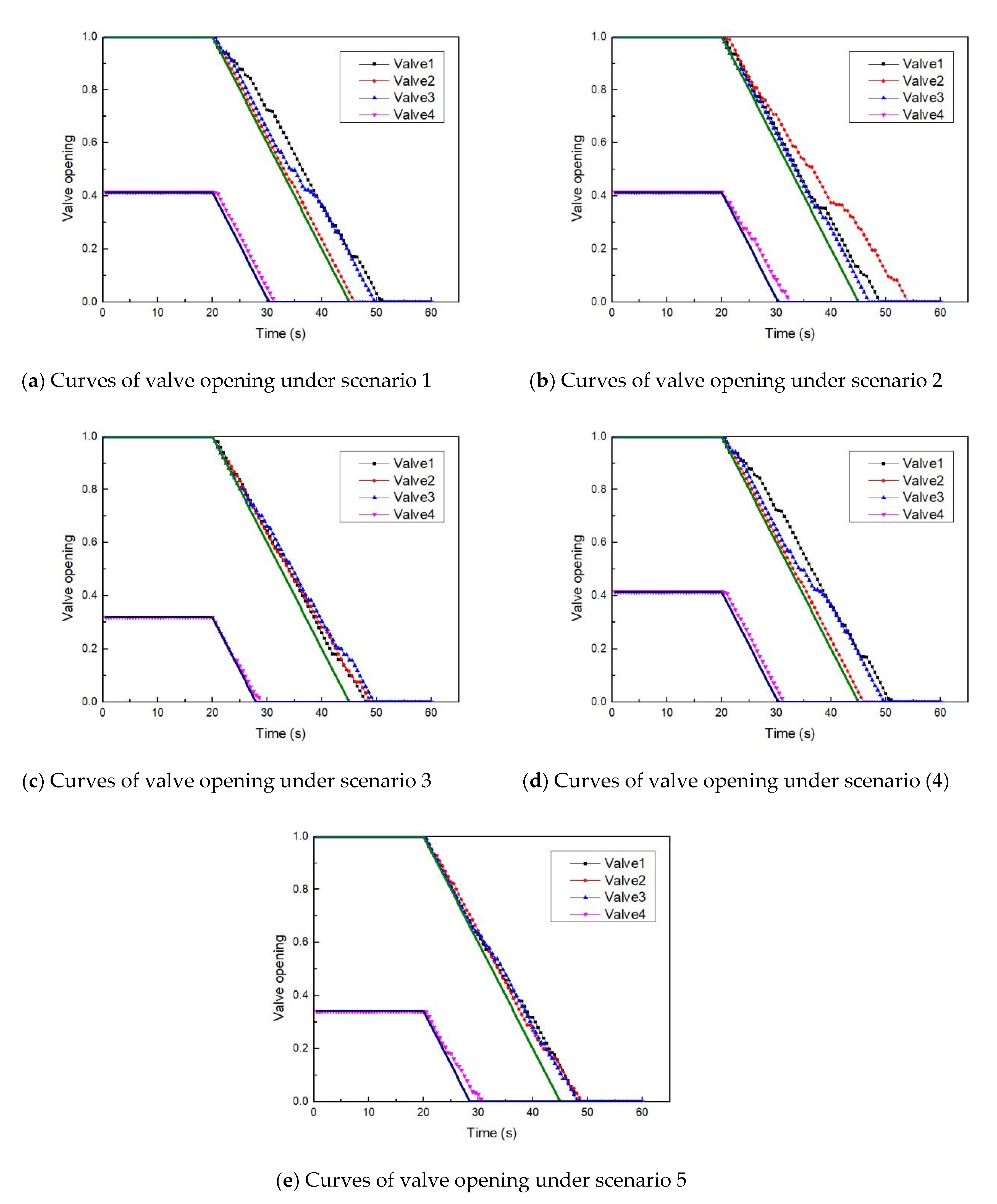
5.3. Exploration for Model Influence Factors
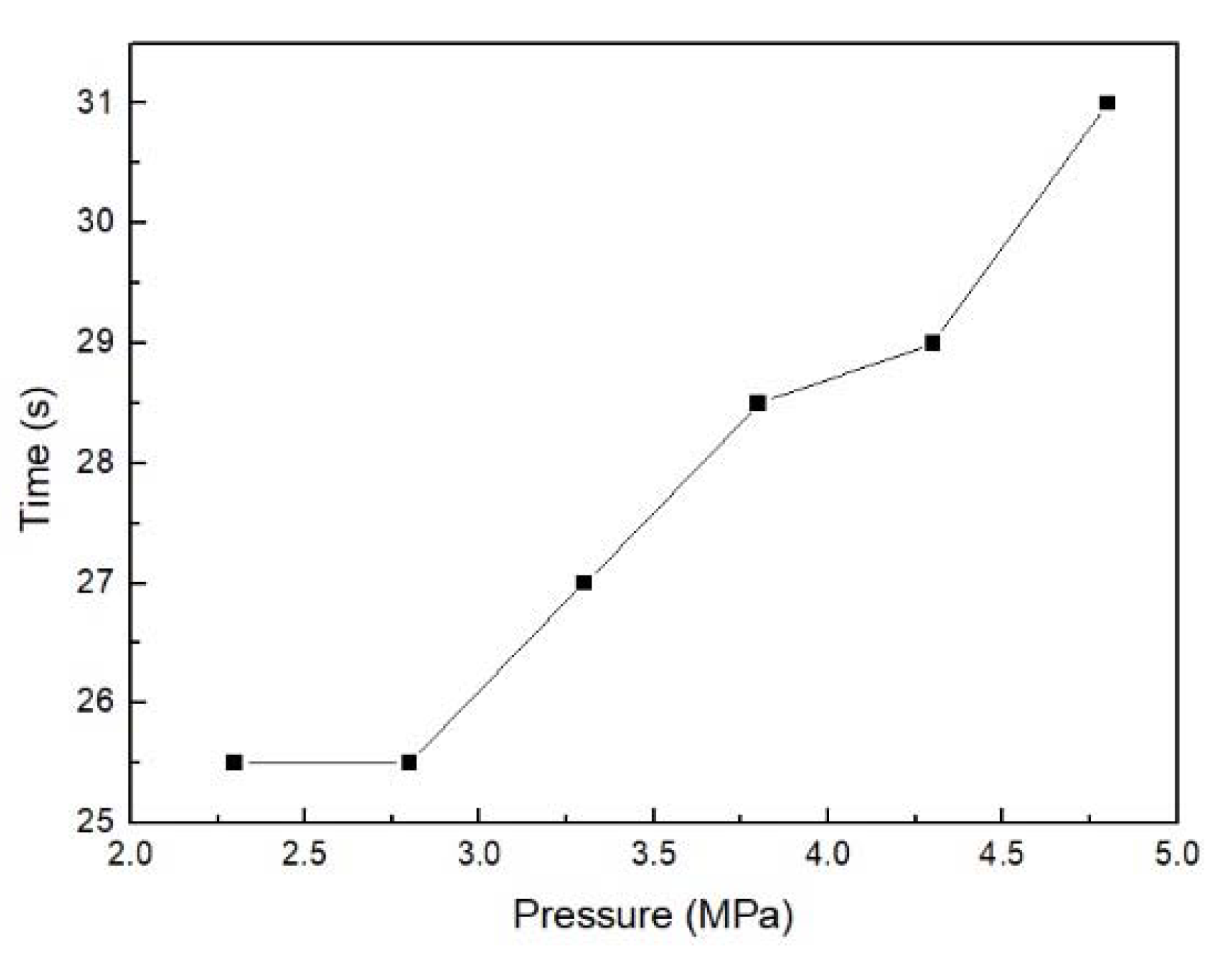
5.4. Analysis on Model Influence Factors
6. Conclusions
- (1)
- When pipeline sections leak, the opening of each valve along pipeline systems declines at the fastest feasible closure rate. In this way, the shortest closure time of valves can be obtained, leading to the least leakage volume.
- (2)
- Locating the leak point in different pipeline sections affects the valve control scheme and closure time. When the original states are different or the distance between the leakage point and the start becomes longer, the closure time will be prolonged.
- (3)
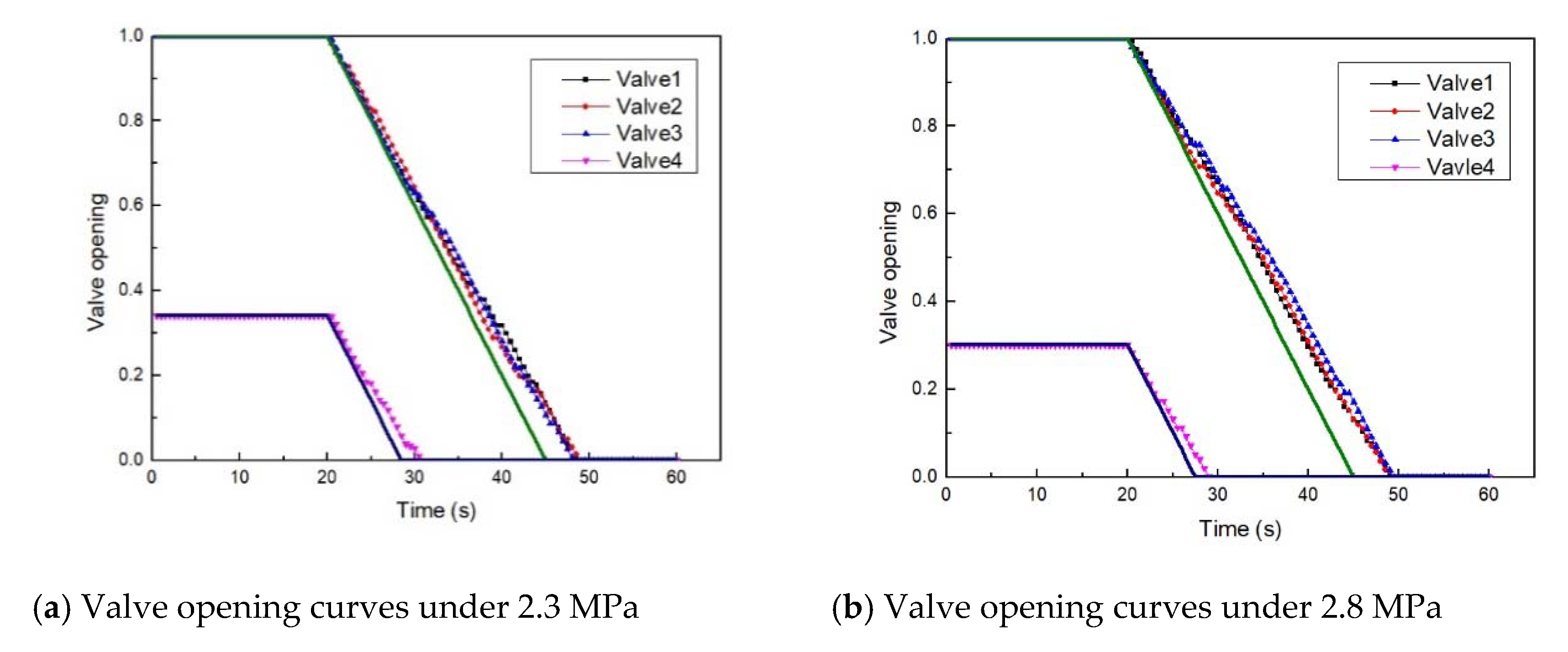
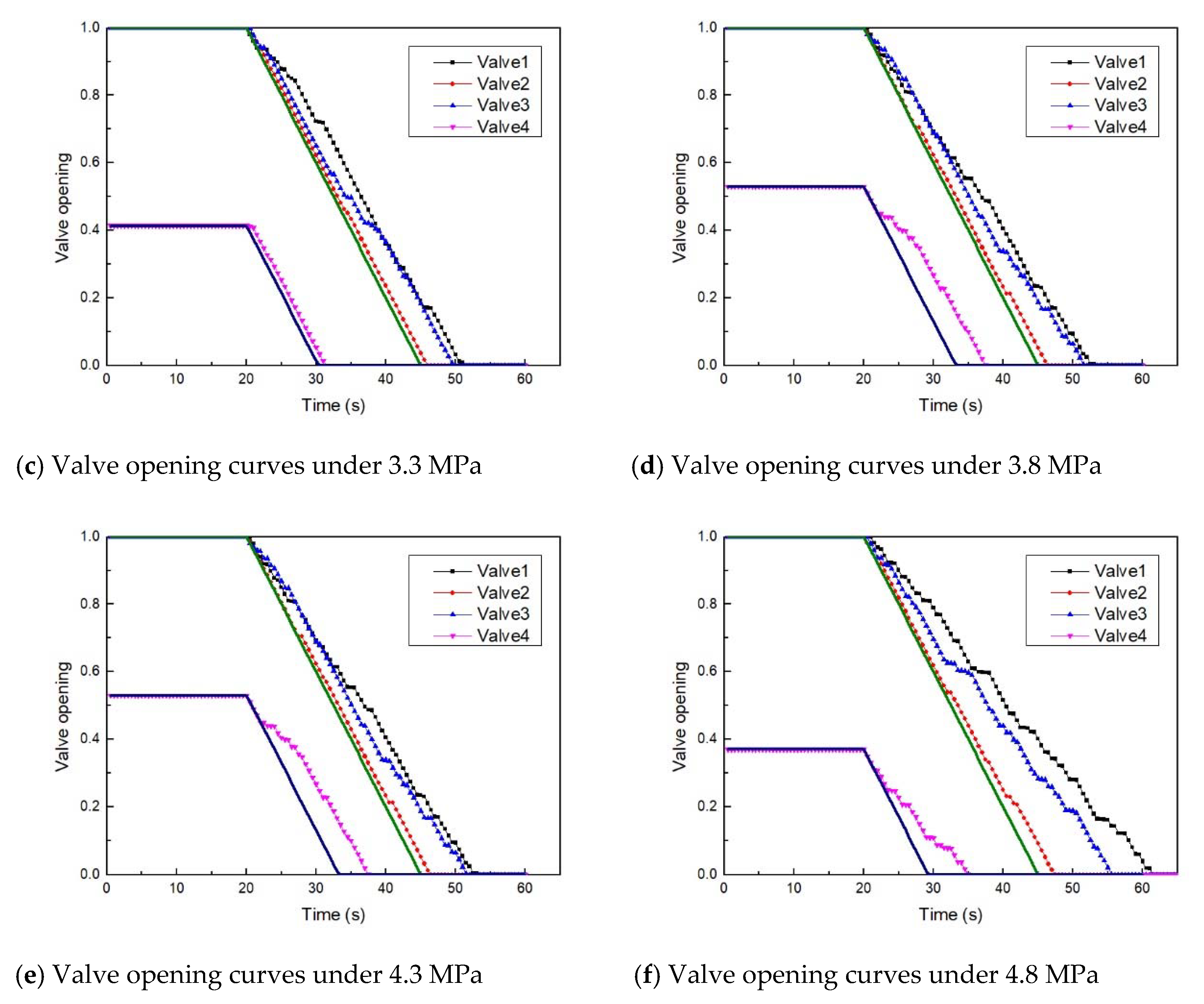
- The pressure in pipelines affects the closure time and scheme of valves. As the pressure increases along the pipeline, the closure time before the leak point tends to rise and a lower pressure will contribute to less closure time fluctuation because at this moment, valves will be closed at the fastest allowable closure rate and overpressure will not happen.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbols | |
| a | Velocity of pressure wave in the pipeline (m/s) |
| AL | The area of leak aperture (m2) |
| Binary variable of cut-off valves | |
| Binary variable of distinguishing flowrate ranges | |
| Cd | Orifice flow coefficient, 0.98–0.99, dimensionless |
| Cv | Leak coefficient, Cv = AL·Cd·α, dimensionless |
| D | The inner diameter of the pipeline (m) |
| E | Modulus of elasticity (Pa) |
| f | Frictional coefficient along the pipeline, dimensionless |
| g | Gravitational acceleration (m/s2) |
| H | Hydraulic head in pipeline (m) |
| Hydraulic head of pipeline section i at moment j (m) | |
| HL | Inner hydraulic head at leak point (m) |
| He | Hydraulic head outside leak aperture (m) |
| HVi | Actual measuring hydraulic head of pipeline section i (m) |
| K | Bulk modulus of elasticity (Pa) |
| L | Pipeline length (km) |
| m | Coefficient associated with flow regime |
| M | Penalty coefficient |
| Pmaxi | Upper limit of pipeline pressure (Pa) |
| Cross-section flowrate of pipeline section i at moment j (m3/h) | |
| Flowrate of pipeline section i at end moment (m3/h) | |
| Flowrate of pipeline start at moment j (m3/h) | |
| Flowrate of the leak aperture which is L from pipeline start at moment j (m3/h) | |
| Qmaxa | Maximum flowrate in flowrate range a (m3/h) |
| Qmina | Minimum flowrate in flowrate range a (m3/h) |
| Δt | Closure time of valves (s) |
| x | Distance of leak point from the upstream station (m) |
| v | Average flow velocity of the fluid in the pipeline (m/s) |
| Greek symbols | |
| α | Flow contraction coefficient, 0.62–0.66, dimensionless |
| αa | Constant item coefficient of pipeline flowrate linearization in flowrate range a |
| ρa | Variable coefficient of pipeline flowrate linearization in flowrate range a |
| υa | Constant item coefficient of the linearization flowrate at leak aperture in flowrate range a |
| ωa | Variable coefficient of the linearization flowrate at leak aperure in flowrate range a |
| ρ | Average density of the fluid in the cross-sectional area (kg/m3) |
| i | Closure rate of upstream valves of pipeline section i at j moment |
| ψis | Opening of valves locating at upstream leak pipeline section |
| ψi | Opening of cut-off valves at end moment |
| Δϕmax | Upper limit of closed rate of valves |
References
- Hou, P.; Yi, X.; Dong, H. A Spatial Statistic Based Risk Assessment Approach to Prioritize the Pipeline Inspection of the Pipeline Network. Energies 2020, 13, 685. [Google Scholar] [CrossRef] [Green Version]
- Ramírez-Camacho, J.G.; Carbone, F.; Pastor, E.; Bubbico, R.; Casal, J. Assessing the consequences of pipeline accidents to support land-use planning. Saf. Sci. 2017, 97, 34–42. [Google Scholar] [CrossRef]
- Inanloo, B.; Tansel, B.; Shams, K.; Jin, X.; Gan, A. A decision aid GIS-based risk assessment and vulnerability analysis approach for transportation and pipeline networks. Saf. Sci. 2016, 84, 57–66. [Google Scholar] [CrossRef]
- Alkhaledi, K.; Alrushaid, S.; Almansouri, J.; Alrashed, A. Using fault tree analysis in the Al-Ahmadi town gas leak incidents. Saf. Sci. 2015, 79, 184–192. [Google Scholar] [CrossRef]
- Reddy, H.P.; Narasimhan, S.; Bhallamudi, S.M.; Bairagi, S. Leak detection in gas pipeline networks using an efficient state estimator. Part-I: Theory and simulations. Comput. Chem. Eng. 2011, 35, 651–661. [Google Scholar] [CrossRef]
- Wang, F.; Lin, W.; Liu, Z.; Qiu, X. Pipeline Leak Detection and Location Based on Model-Free Isolation of Abnormal Acoustic Signals. Energies 2019, 12, 3172. [Google Scholar] [CrossRef] [Green Version]
- Mandal, S.K.; Chan, F.T.; Tiwari, M.K. Leak detection of pipeline: An integrated approach of rough set theory and artificial bee colony trained SVM. Expert Syst. Appl. 2012, 39, 3071–3080. [Google Scholar] [CrossRef]
- Liang, W.; Zhang, L.-B. A wave change analysis (WCA) method for pipeline leak detection using Gaussian mixture model. J. Loss Prev. Process. Ind. 2012, 25, 60–69. [Google Scholar] [CrossRef]
- Vankov, Y.; Rumyantsev, A.; Ziganshin, S.; Politova, T.; Minyazev, R.; Zagretdinov, A. Assessment of the Condition of Pipelines Using Convolutional Neural Networks. Energies 2020, 13, 618. [Google Scholar] [CrossRef] [Green Version]
- Elaoud, S.; Hadj-Taïeb, L.; Hadj-Taieb, E. Leak detection of hydrogen–natural gas mixtures in pipes using the characteristics method of specified time intervals. J. Loss Prev. Process. Ind. 2010, 23, 637–645. [Google Scholar] [CrossRef]
- Hermansyah, H.; Hidayat, M.N.; Kumaraningrum, A.R.; Yohda, M.; Shariff, A.M. Assessment, Mitigation, and Control of Potential Gas Leakage in Existing Buildings Not Designed for Gas Installation in Indonesia. Energies 2018, 11, 2970. [Google Scholar] [CrossRef] [Green Version]
- Meng, L.; Yuxing, L.; Wuchang, W.; Juntao, F. Experimental study on leak detection and location for gas pipeline based on acoustic method. J. Loss Prev. Process. Ind. 2012, 25, 90–102. [Google Scholar] [CrossRef]
- Liu, Z.; Zhou, Y.; Huang, P.; Sun, R.; Wang, S.; Xiaohong, M.A. Scaled field test for COleakage and dispersion from pipelines. Ciesc J. 2012. [Google Scholar]
- Xie, Q.; Tu, R.; Jiang, X.; Li, K.; Zhou, X. The leakage behavior of supercritical CO2 flow in an experimental pipeline system. Appl. Energy 2014, 130, 574–580. [Google Scholar] [CrossRef]
- Koornneef, J.; Spruijt, M.; Molag, M.; Ramirez, A.; Turkenburg, W.; Faaij, A. Quantitative risk assessment of CO2 transport by pipelines—A review of uncertainties and their impacts. J. Hazard. Mater. 2010, 177, 12–27. [Google Scholar] [CrossRef]
- Cleaver, R.; Cumber, P.; Halford, A. Modelling outflow from a ruptured pipeline transporting compressed volatile liquids. J. Loss Prev. Process. Ind. 2003, 16, 533–543. [Google Scholar] [CrossRef]
- Mahgerefteh, H.; Oke, A.O.; Rykov, Y. Efficient numerical solution for highly transient flows. Chem. Eng. Sci. 2006, 61, 5049–5056. [Google Scholar] [CrossRef]
- Choi, J.; Hur, N.; Kang, S.; Lee, E.D.; Lee, K.B. A CFD simulation of hydrogen dispersion for the hydrogen leakage from a fuel cell vehicle in an underground parking garage. Int. J. Hydrog. Energy 2013, 38, 8084–8091. [Google Scholar] [CrossRef]
- He, X.; Zhang, Y.; Wang, C.; Zhang, C.; Cheng, L.; Chen, K.; Hu, B. Influence of Critical Wall Roughness on the Performance of Double-Channel Sewage Pump. Energies 2020, 13, 464. [Google Scholar] [CrossRef] [Green Version]
- Gorenz, P.; Herzog, N.; Egbers, C. Investigation of CO 2 Release Pressures in Pipeline Cracks. Energy Procedia 2013, 40, 285–293. [Google Scholar] [CrossRef] [Green Version]
- Molag, M.; Dam, C. Modelling of accidental releases from a high pressure CO2 pipelines. Energy Procedia 2011, 4, 2301–2307. [Google Scholar] [CrossRef] [Green Version]
- Mazzoldi, A.; Hill, T.; Colls, J.J. CFD and Gaussian atmospheric dispersion models: A comparison for leak from carbon dioxide transportation and storage facilities. Atmos. Environ. 2008, 42, 8046–8054. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, W.; Xu, N.; Yuan, M.; Liang, Y. Control optimization for liquid pipelines under leak condition. In Proceedings of the 2018 7th International Conference on Industrial Technology and Management (ICITM), Oxford, UK, 7–9 March 2018; pp. 42–46. [Google Scholar]
- Plapp, J.E. Engineering Fluid Mechanics. Available online: https://www.springer.com/gp/book/9781402067419 (accessed on 20 January 2020).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pipe Length L/km | Pipe Specification D × Φ/mm × mm | Modulus of Elasticity E/Pa | Leak Coefficient Cv | Leak Position X/km |
|---|---|---|---|---|
| 20 | 457 × 7.1 | 207 × 109 | 0.00008 | 12.5 |
| Fluid Density /kg·m−3 | Fluid Viscosity /m2·s−1 | Bulk Modulus of Elasticity K/Pa | Pump Characteristic Parameters A | Pump Characteristic Parameters B |
| 830 | 7.02 × 10−6 | 1.39 × 109 | 392.85 | 807.6 |
| No. | Valve1 | Valve 2 | Valve 3 | Valve 4 |
|---|---|---|---|---|
| Time/s | 33.0 | 25.5 | 31.5 | 17.5 |
| Scenario | Time/s | |||
|---|---|---|---|---|
| Valve 1 | Valve 2 | Valve 3 | Valve 4 | |
| Original state | 33.0 | 25.5 | 31.5 | 17.5 |
| Scenario (1) | 31.0 | 25.5 | 29.5 | 11.0 |
| Scenario (2) | 28.5 | 26.5 | 34.0 | 12.0 |
| Scenario (3) | 30.5 | 25.5 | 34.0 | 11.0 |
| Scenario (4) | 41.0 | 27.0 | 35.5 | 15.0 |
| Scenario (5) | 27.5 | 25.5 | 28.5 | 15.5 |
| Pressure Grades/MPa | Time/s | |||
|---|---|---|---|---|
| Valve 1 | Valve 2 | Valve 3 | Valve 4 | |
| 2.3 | 27.5 | 25.5 | 28.5 | 15.5 |
| 2.8 | 33.0 | 25.5 | 31.5 | 17.5 |
| 3.3 | 41.0 | 27.0 | 35.5 | 15.0 |
| 3.8 | 28.5 | 28.5 | 28.0 | 10.5 |
| 4.3 | 28.5 | 29.0 | 28.5 | 8.5 |
| 4.8 | 30.0 | 31.0 | 31.0 | 11.0 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Shen, R.; Xu, N.; Zhang, H.; Liang, Y. Study on Optimization of Active Control Schemes for Considering Transient Processes in the Case of Pipeline Leakage. Energies 2020, 13, 1692. https://doi.org/10.3390/en13071692
Zhang W, Shen R, Xu N, Zhang H, Liang Y. Study on Optimization of Active Control Schemes for Considering Transient Processes in the Case of Pipeline Leakage. Energies. 2020; 13(7):1692. https://doi.org/10.3390/en13071692
Chicago/Turabian StyleZhang, Wan, Ruihao Shen, Ning Xu, Haoran Zhang, and Yongtu Liang. 2020. "Study on Optimization of Active Control Schemes for Considering Transient Processes in the Case of Pipeline Leakage" Energies 13, no. 7: 1692. https://doi.org/10.3390/en13071692
APA StyleZhang, W., Shen, R., Xu, N., Zhang, H., & Liang, Y. (2020). Study on Optimization of Active Control Schemes for Considering Transient Processes in the Case of Pipeline Leakage. Energies, 13(7), 1692. https://doi.org/10.3390/en13071692