Optimization of a Small Wind Turbine for a Rural Area: A Case Study of Deniliquin, New South Wales, Australia






Abstract
:1. Introduction
2. Numerical Modeling of HAWT Under Separation Conditions
2.1. Governing Equations of Selected Turbulence Models
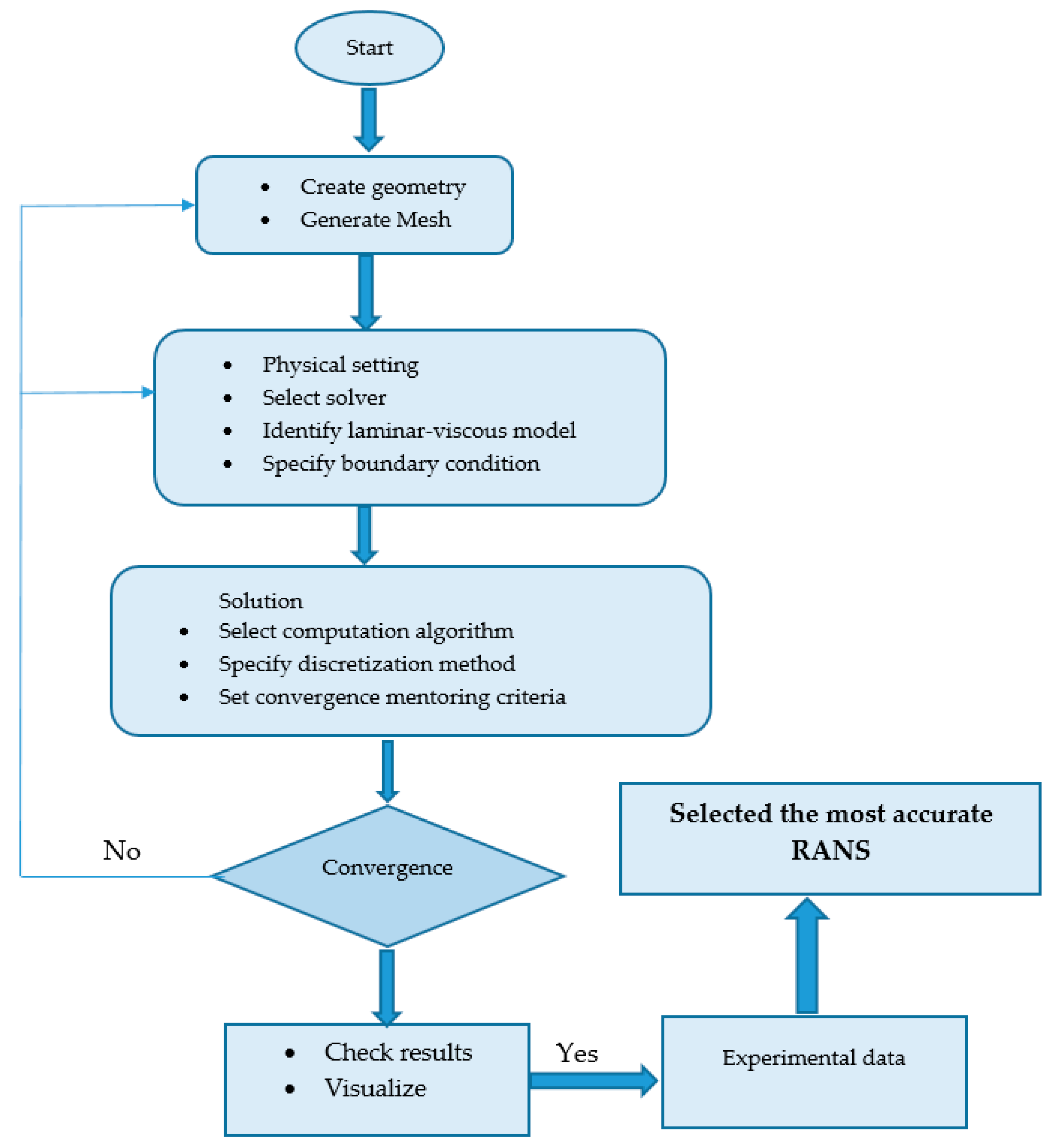
2.2. CFD of Wind Turbine
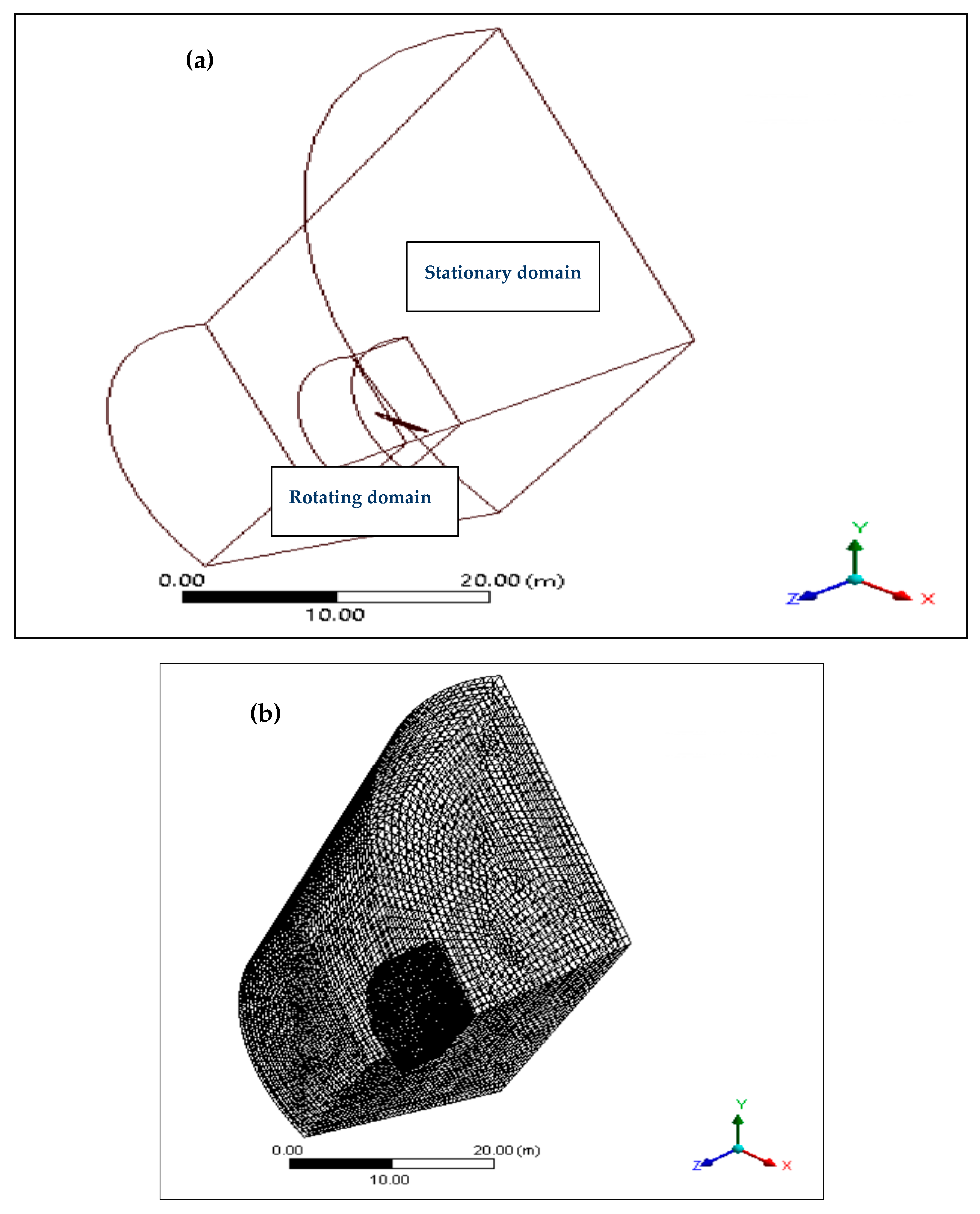
2.2.1. Computational Domain
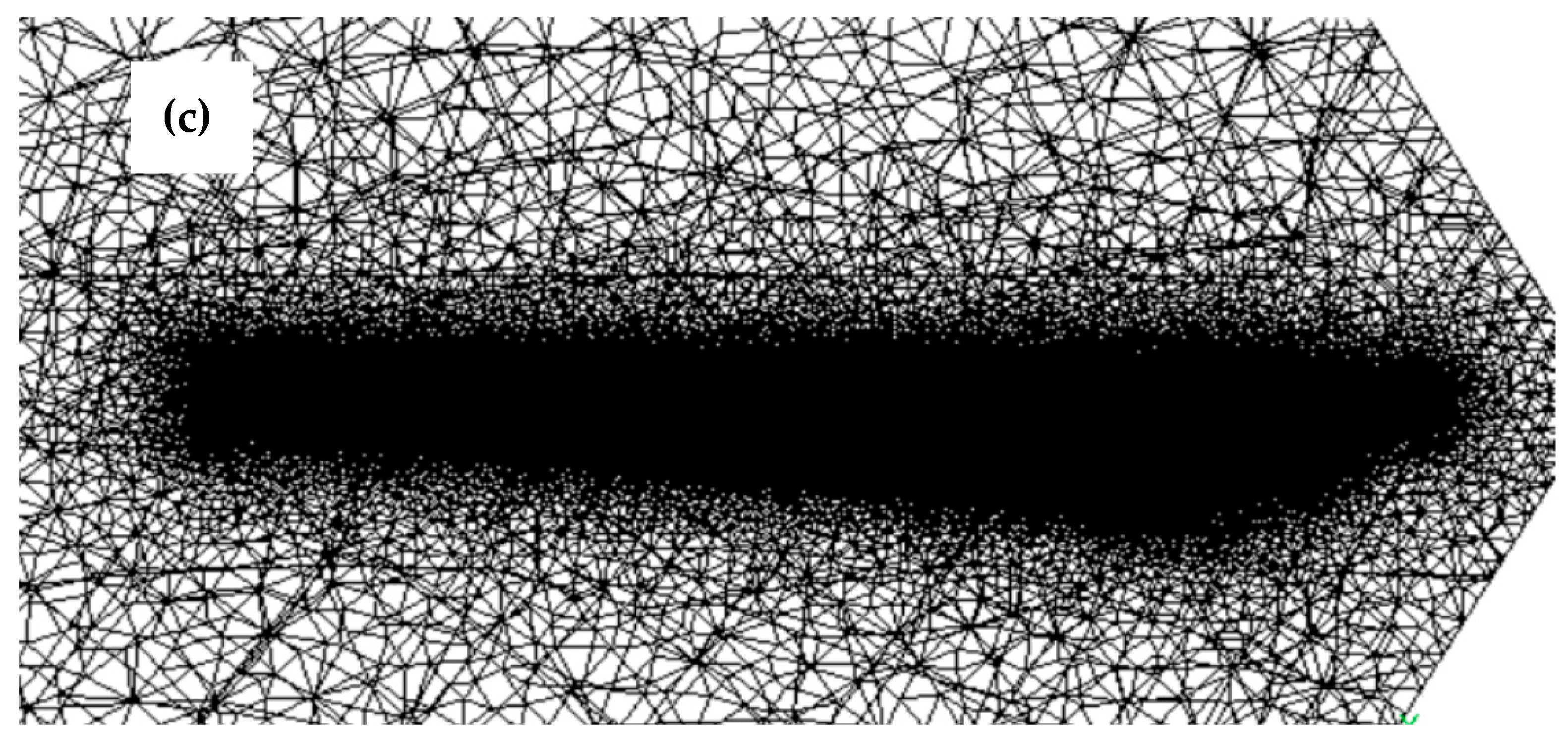
2.2.2. Computational Mesh Generation
2.2.3. Numerical Method and Boundary Conditions
3. Optimization of Wind Turbine
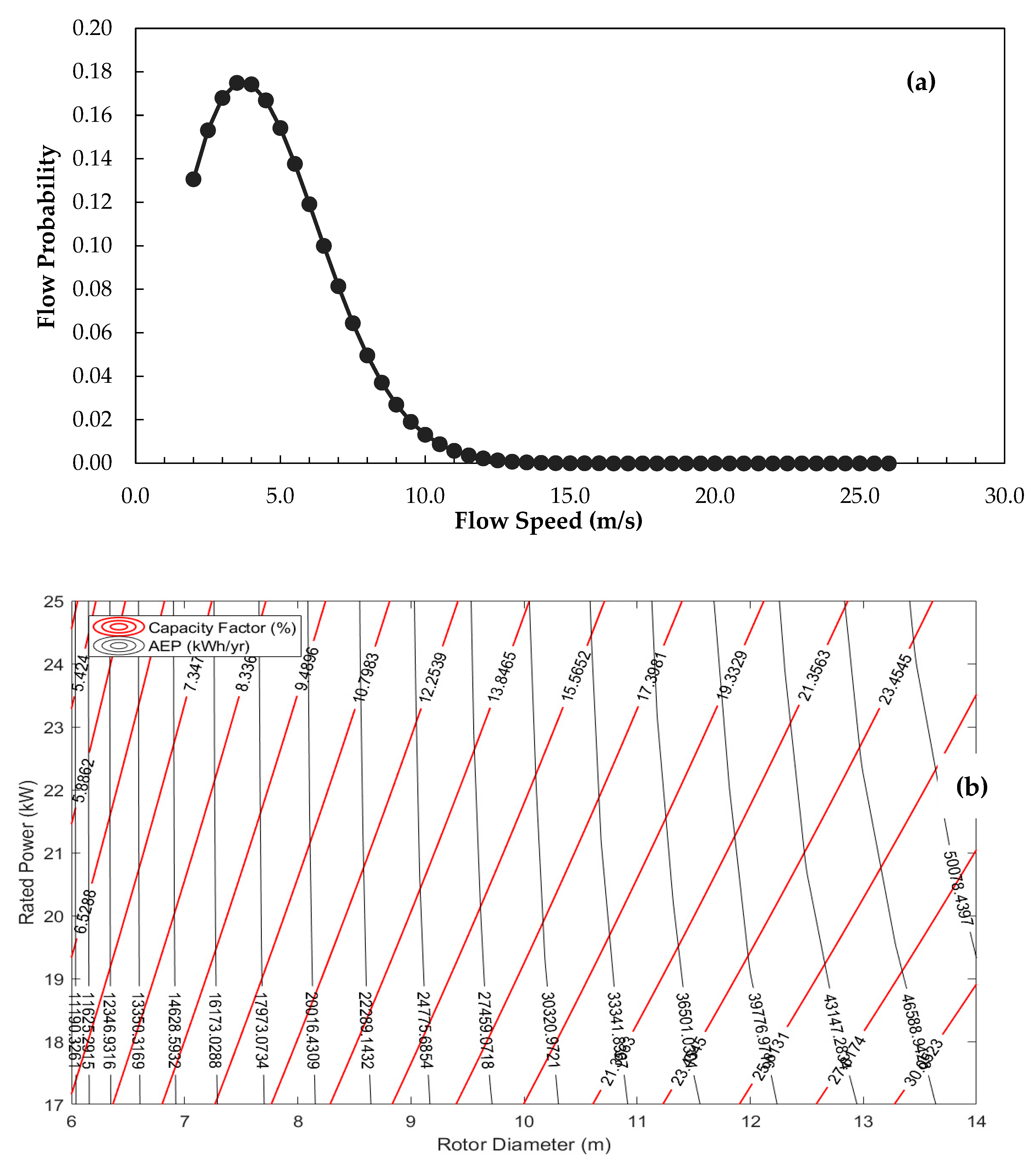
3.1. Wind Data Modelling
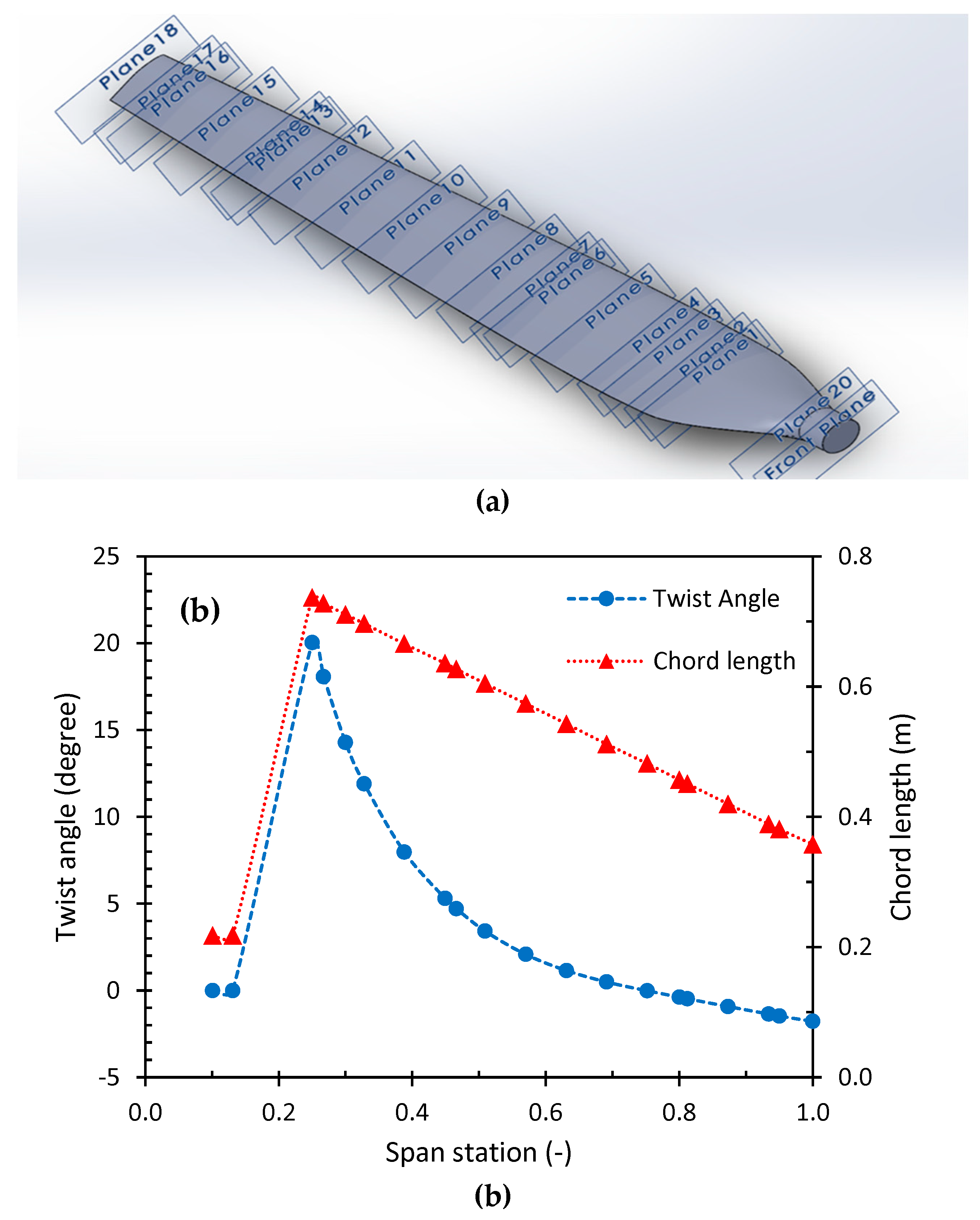
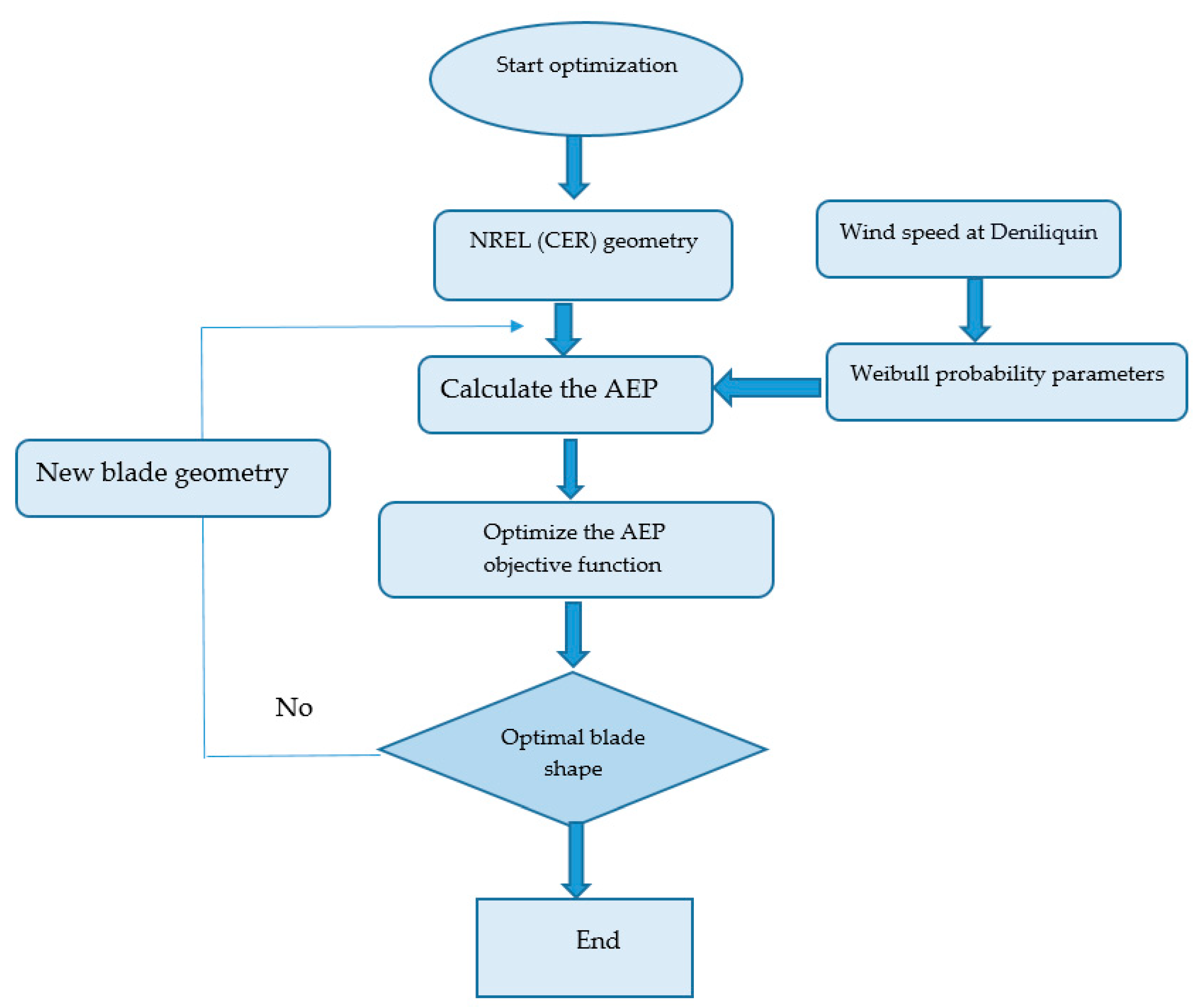
3.2. Optimization Blade Shape Methodology
3.2.1. Design Variables and Objective Function
3.2.2. Constraints
4. Results and Discussion
4.1. Model Validation
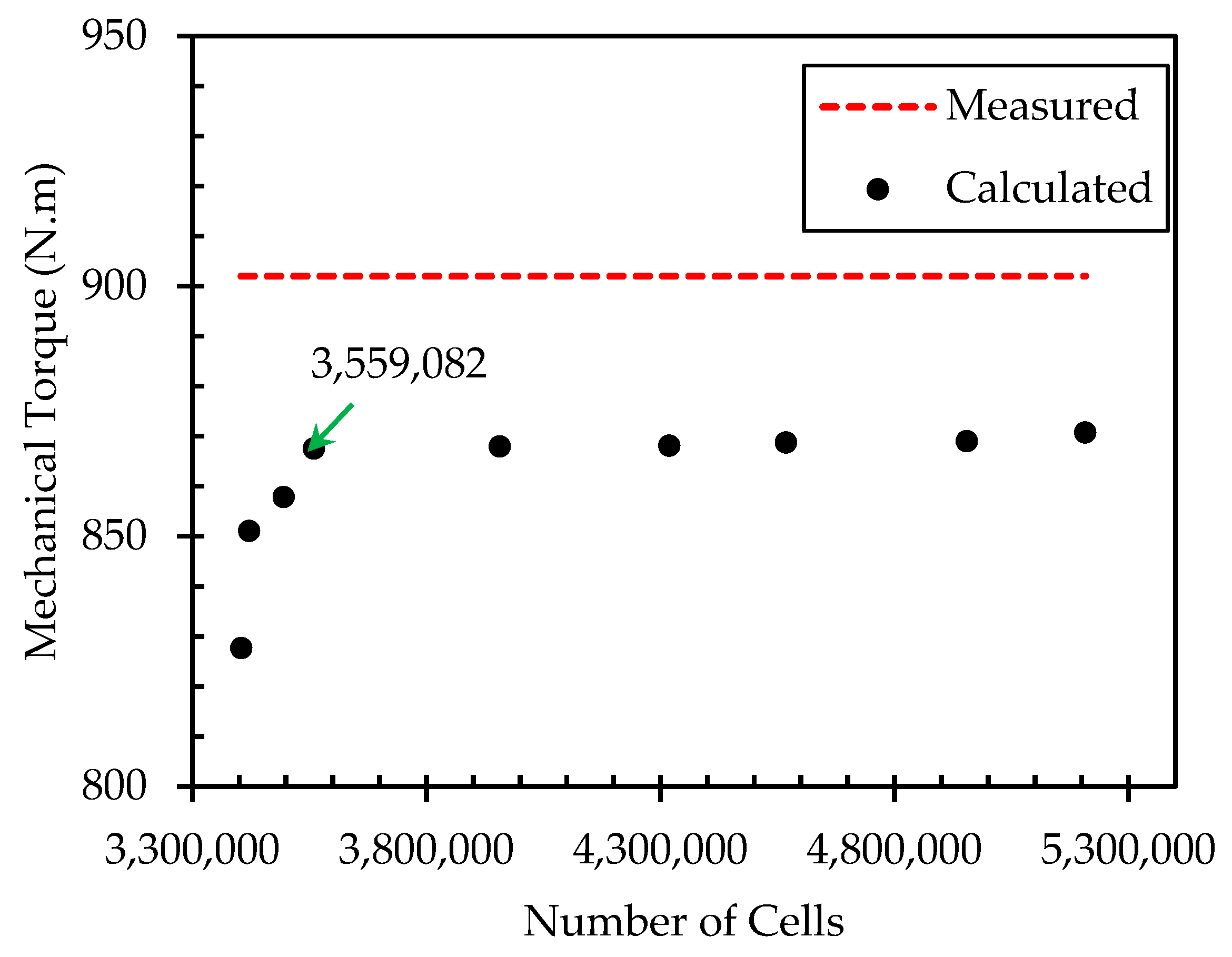
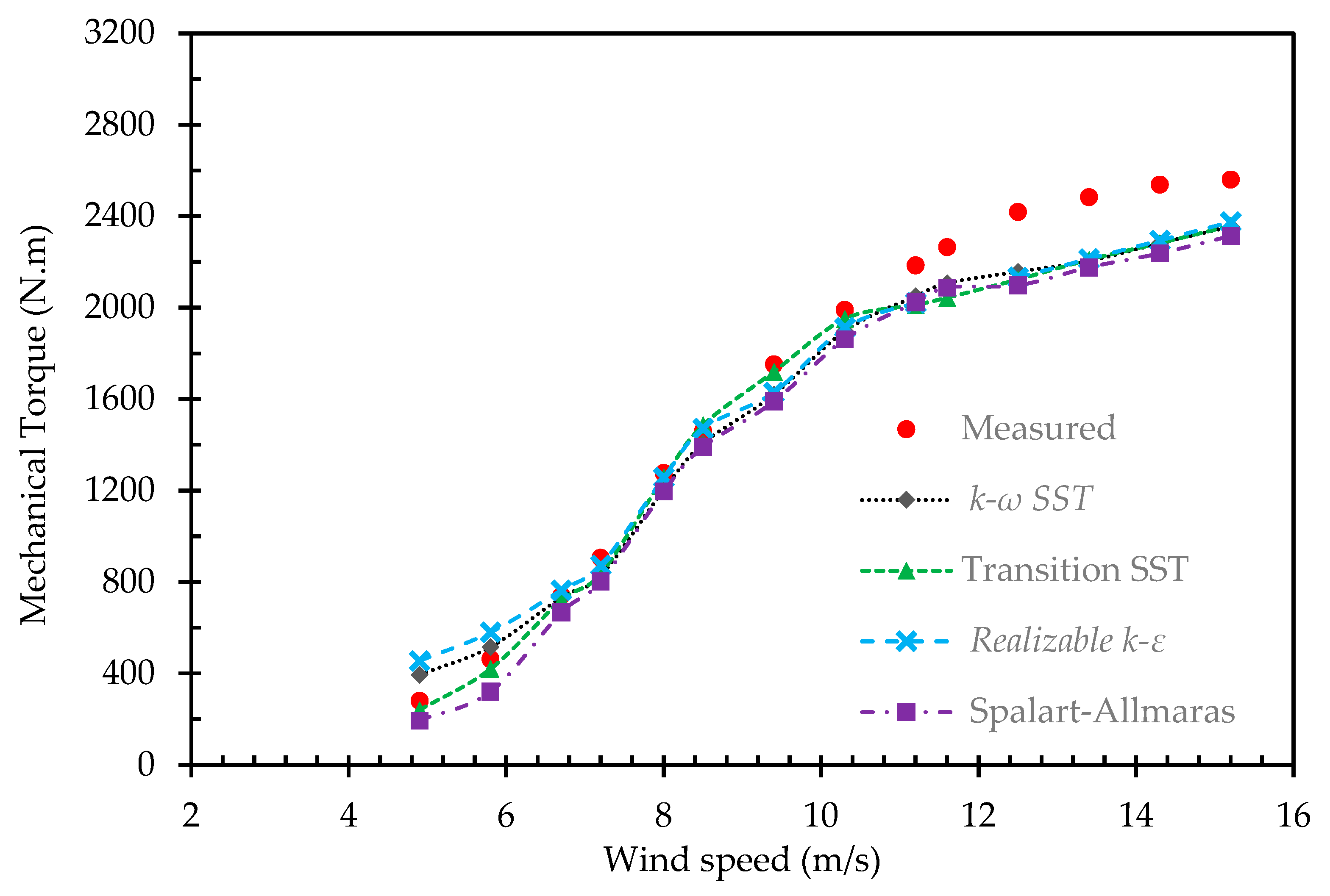
4.1.1. Mechanical Torque
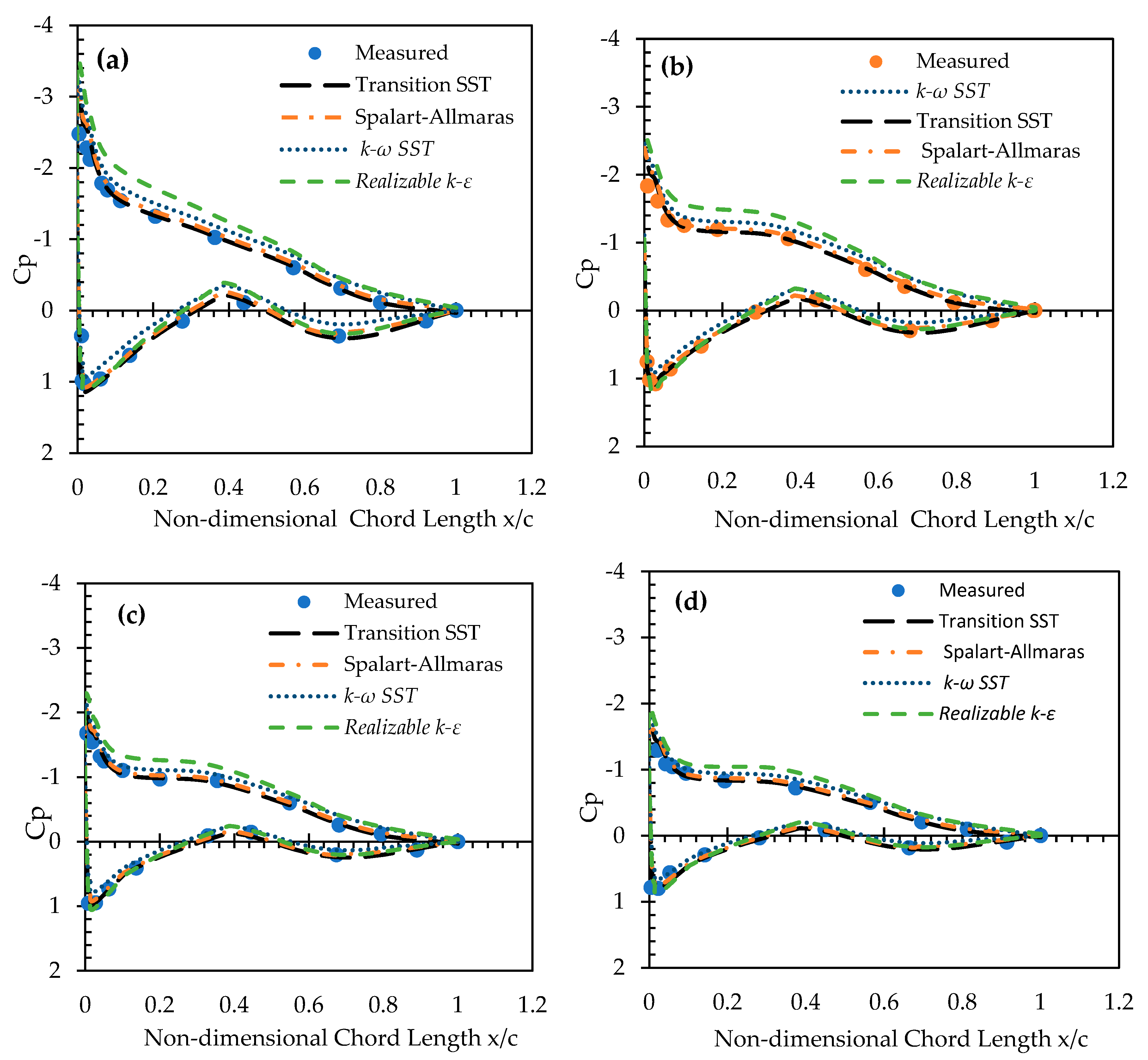
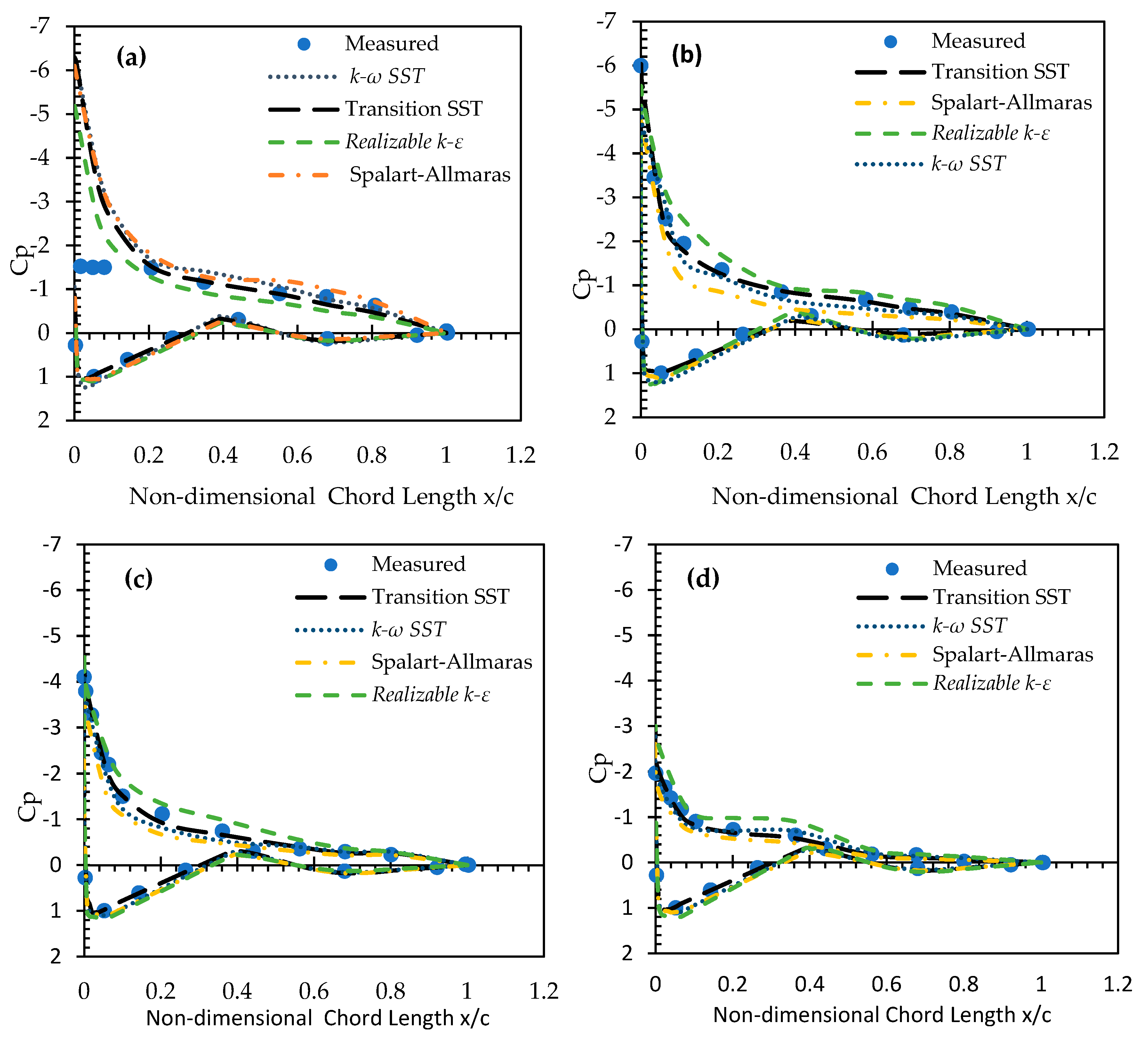
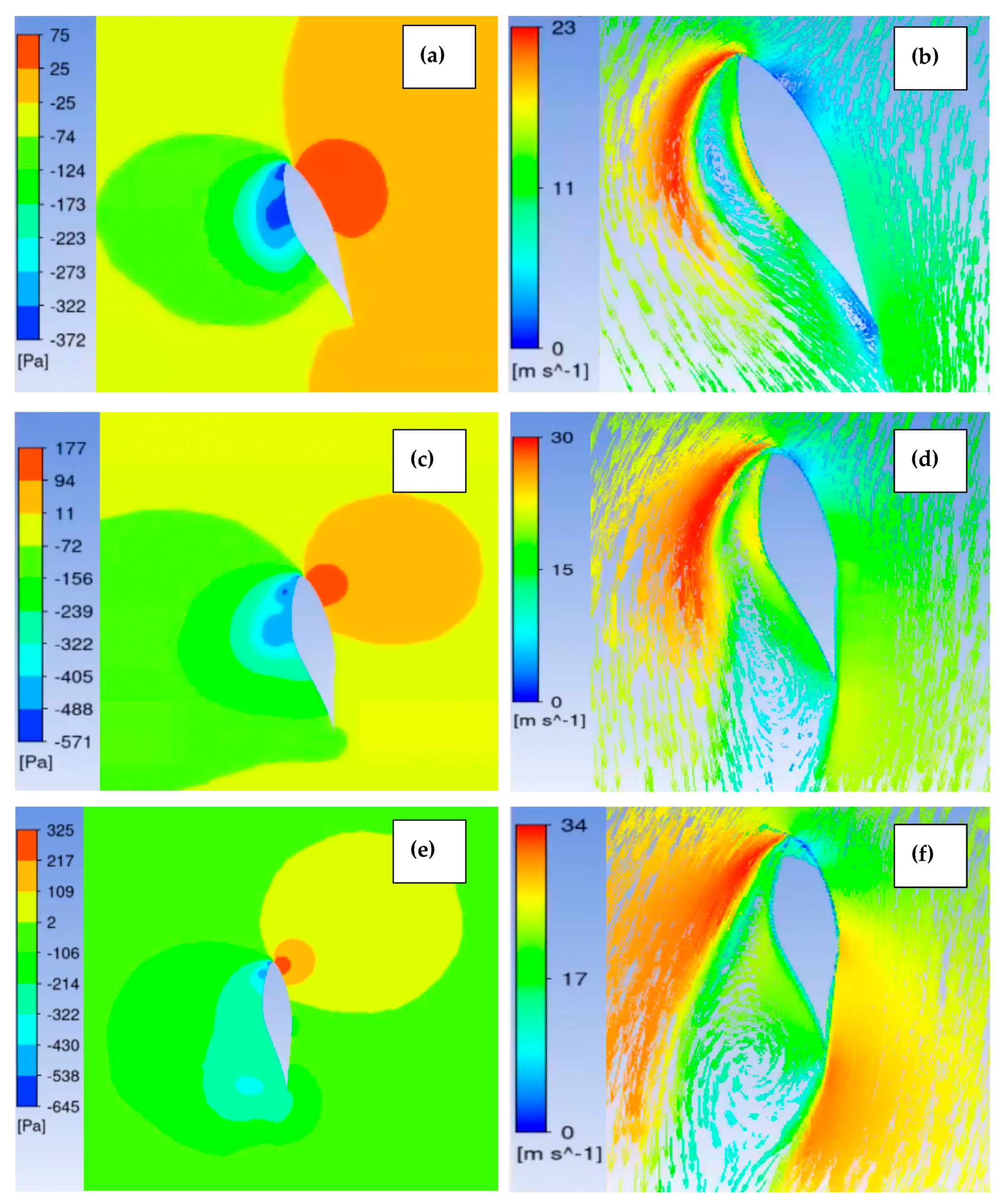
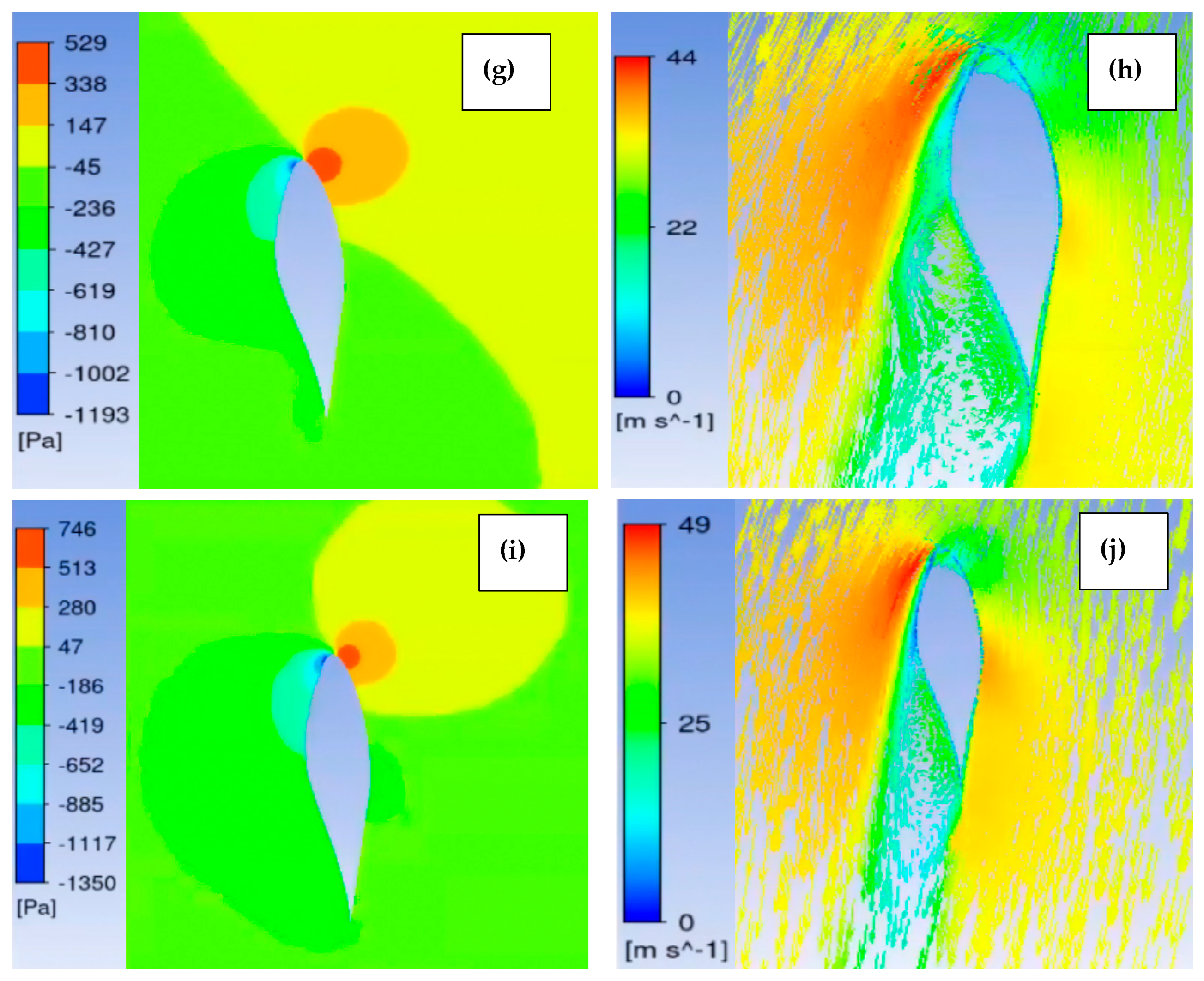
4.1.2. Pressure Distribution
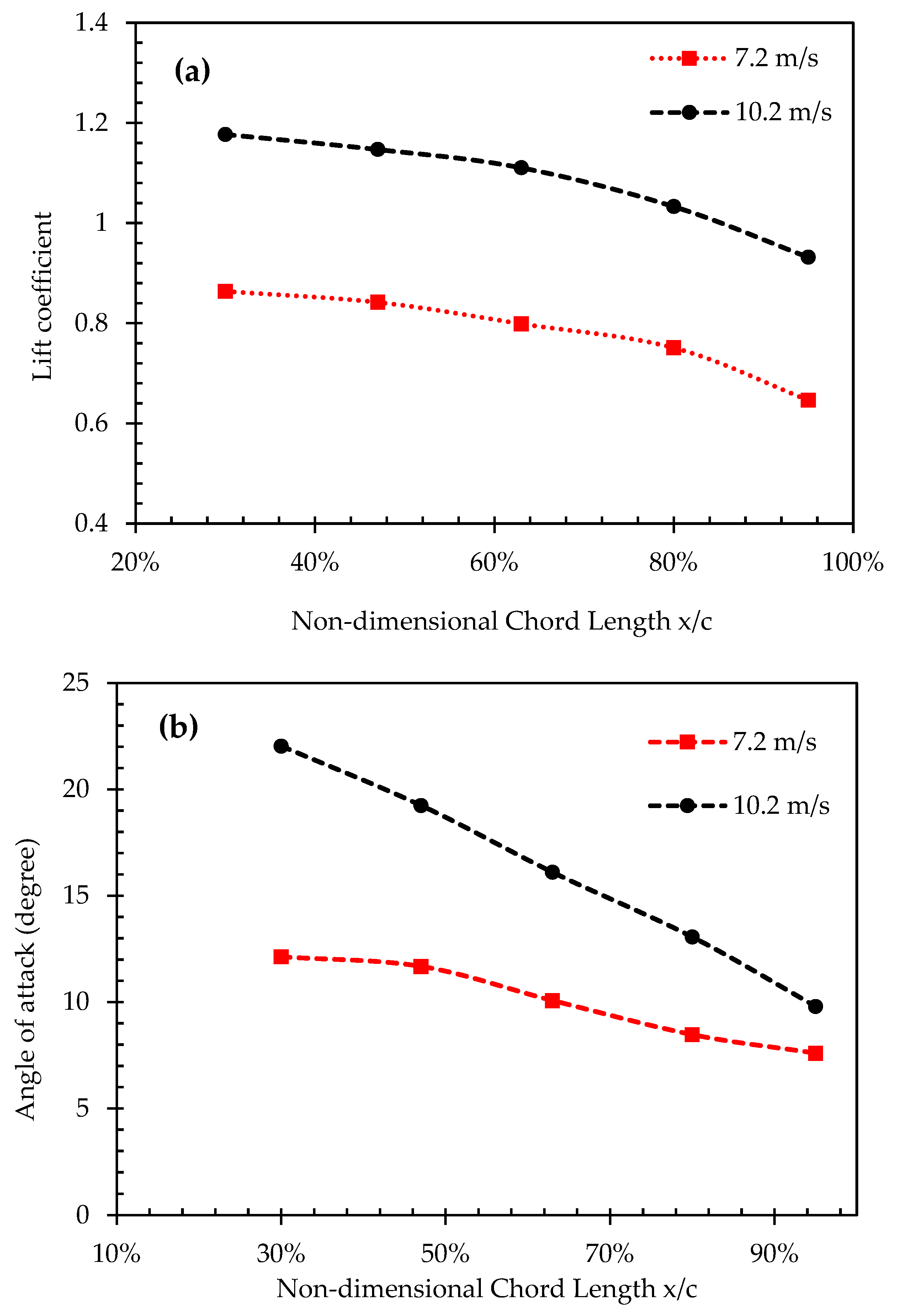
4.1.3. Investigation of the Airfoil Characteristics
4.2. Optimization of Wind Turbine
5. Conclusions
- (1)
- All four RANS models agreed well with experimental data at low wind speed ranges. Differences appeared among the four turbulence models as the wind speed increased;
- (2)
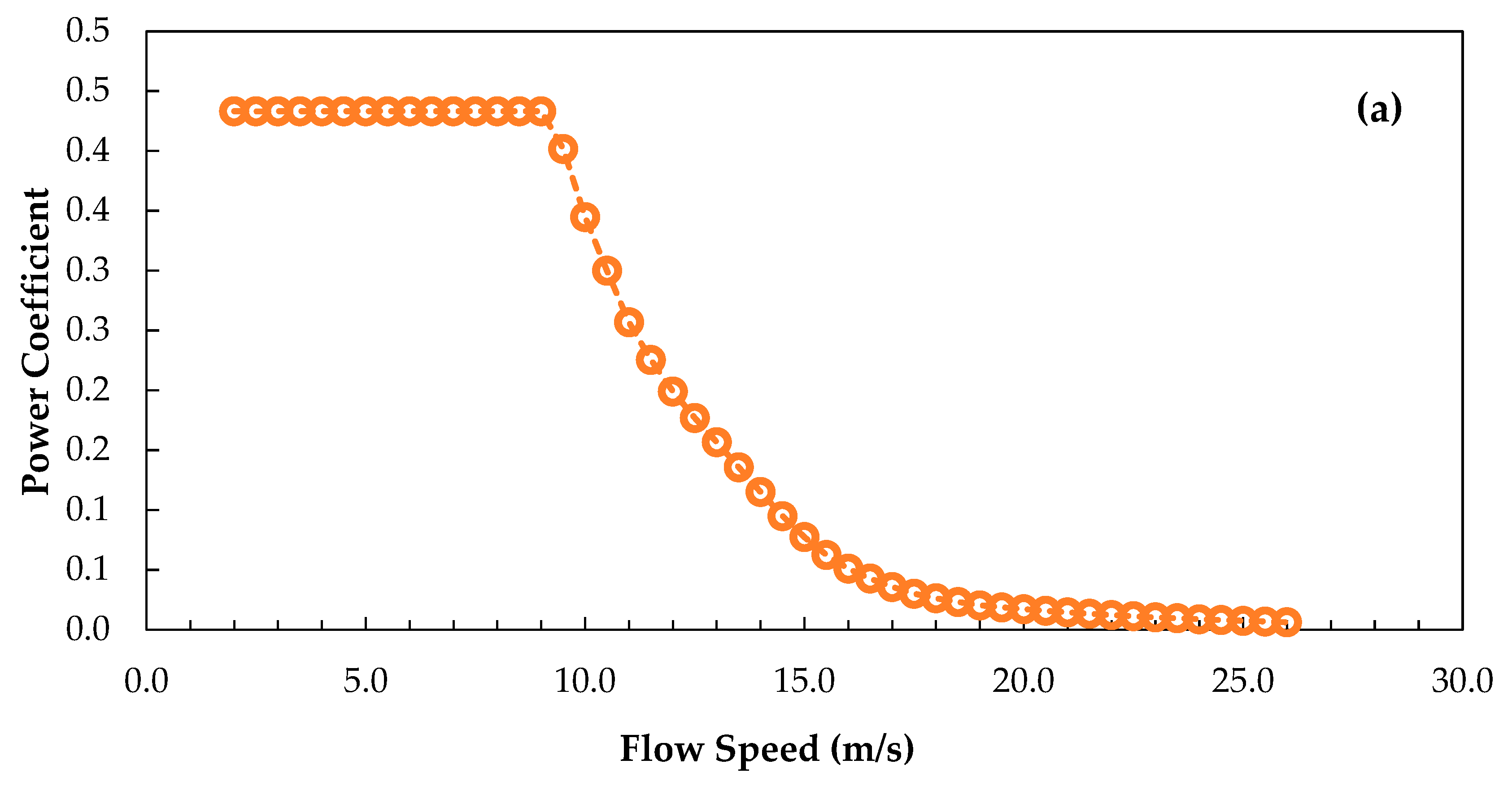
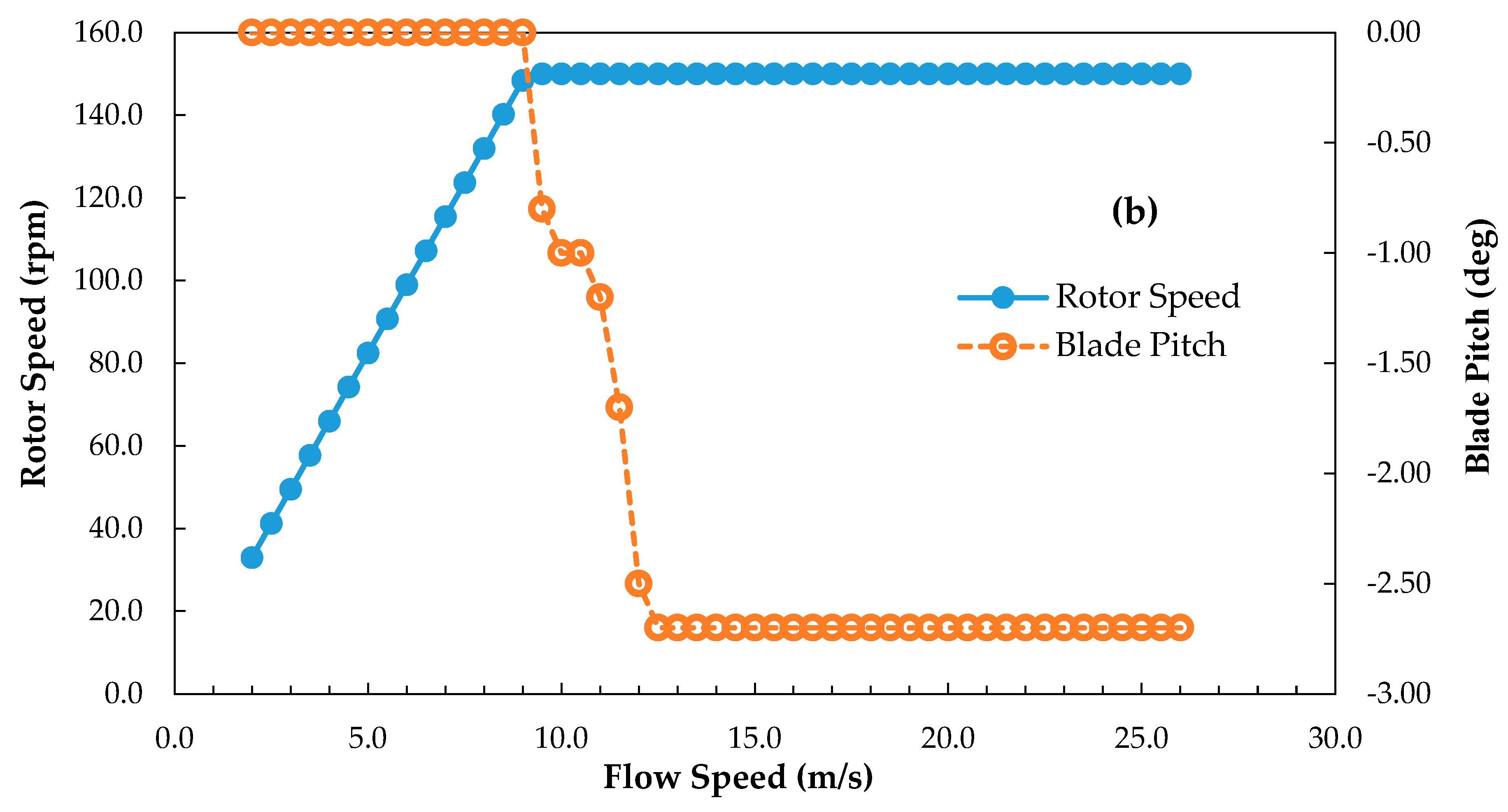
- At the onset of a stall condition of 10.2 m/s, the ttransition SST reported the best accuracy for predicting the pressure coefficient of the airfoil. The angle of attack increased with increasing wind speed and decreased with the radial position. The full separation occurred between the hub and 80% of the tip sections;
- (3)
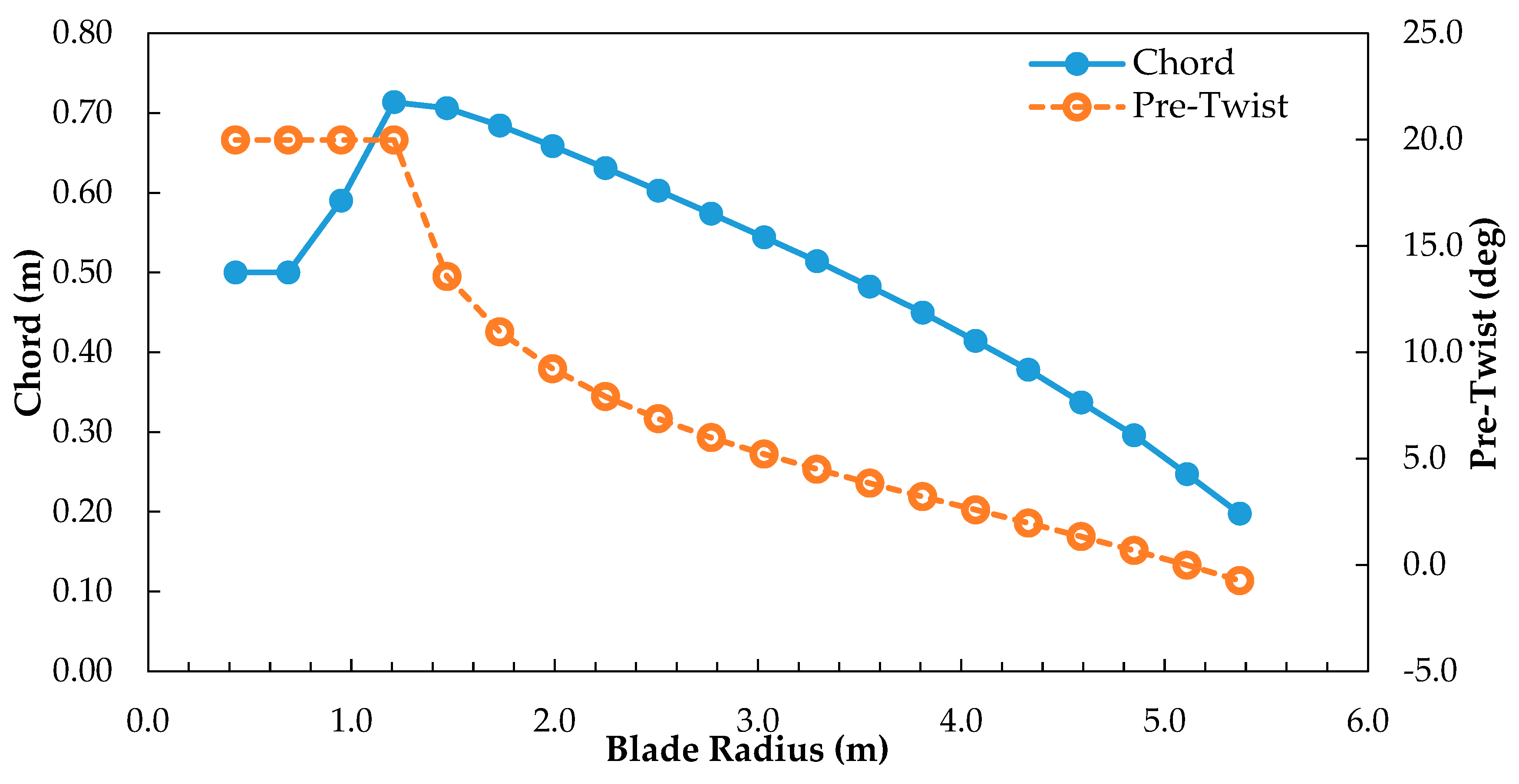
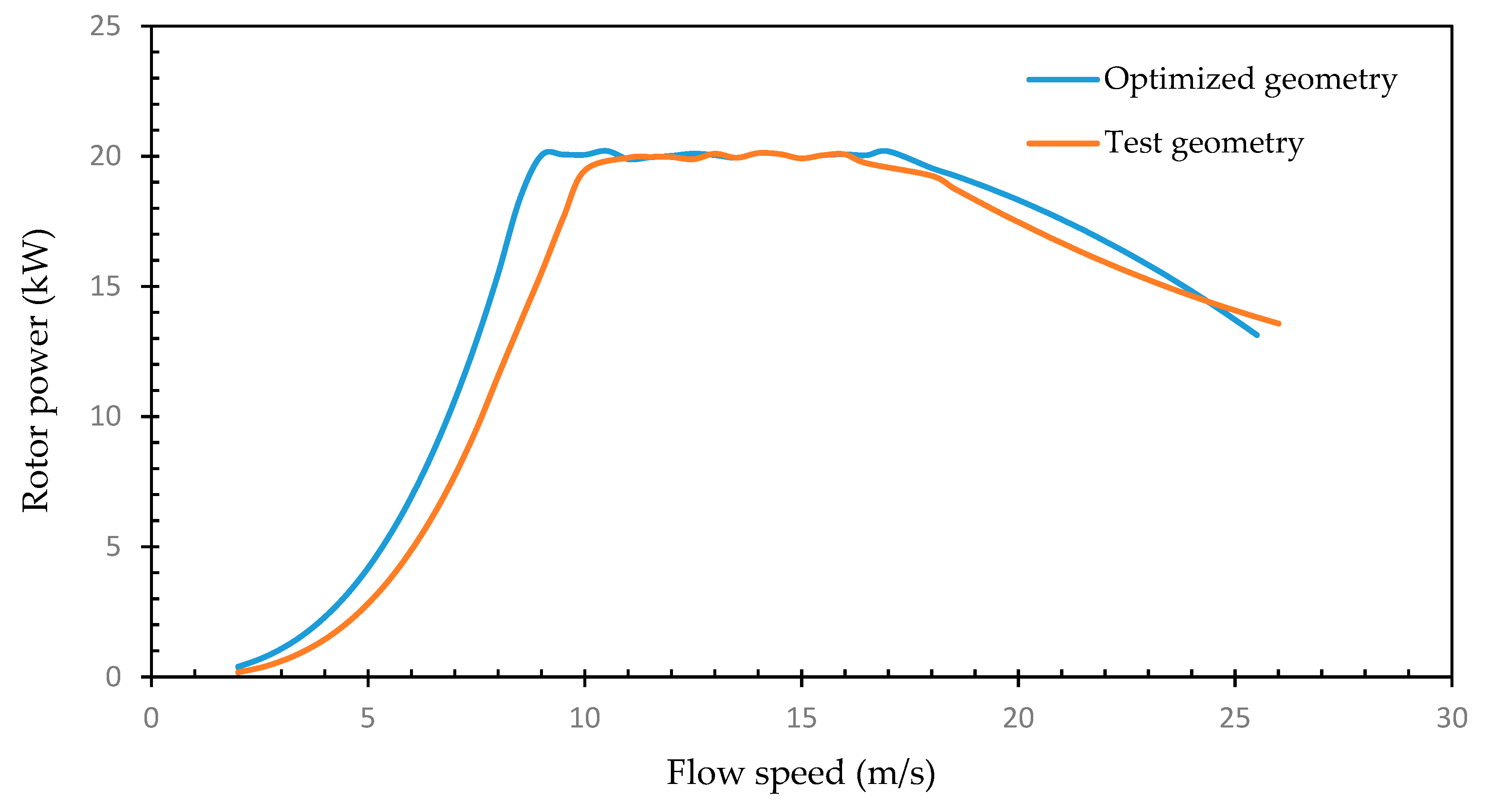
- The shape of the rotor was modified by changing the chord and twist distribution along the blade, leading to 9.1% improvement in AEP.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RANS Models | Governing Equations |
|---|---|
| Realizable k-ε | Turbulence eddy viscosity (: Turbulence kinetic energy (k): Turbulence dissipation rate (ε): where = 1.2 and = 1.0 are the Prandtl numbers for ε and k, respectively. The residual model constants are: = 1.44, = 1.9, and = 0.09 [21]. |
| k-ω SST | Turbulence eddy viscosity (: are the first and second blending function, respectively [64]. |
| Spalart-Allmaras | Turbulence eddy viscosity (: where is a damping function ranging from zero value at the wall to 1 at far away from the boundary. |
| Transition SST |
References
- Conti, J.; Holtberg, P.; Diefenderfer, J.; LaRose, A.; Turnure, J.T.; Westfall, L. International Energy Outlook 2016 with Projections to 2040; USDOE Energy Information Administration (EIA): Washington, DC, USA, 2016.
- Sims, R.E.; Rogner, H.-H.; Gregory, K. Carbon emission and mitigation cost comparisons between fossil fuel, nuclear and renewable energy resources for electricity generation. Energy policy 2003, 31, 1315–1326. [Google Scholar] [CrossRef]
- Wind Power Capacity Reaches 546 GW, 60 GW added in 2017; World Wind Energy Association: Bonn, Germany, 2018.
- Kaviani, H.; Nejat, A. Aerodynamic noise prediction of a MW-class HAWT using shear wind profile. J. Wind Eng. Ind. Aerodyn. 2017, 168, 164–176. [Google Scholar] [CrossRef]
- Ashrafi, Z.N.; Ghaderi, M.; Sedaghat, A. Parametric study on off-design aerodynamic performance of a horizontal axis wind turbine blade and proposed pitch control. Energy Convers. Manag. 2015, 93, 349–356. [Google Scholar] [CrossRef]
- Alpman, E. Effect of selection of design parameters on the optimization of a horizontal axis wind turbine via genetic algorithm. In Proceedings of the Journal of Physics: Conference Series, Denpasar, Indonesia, 23–24 August 2016; p. 012044. [Google Scholar]
- Darwish, A.S.; Shaaban, S.; Marsillac, E.; Mahmood, N.M. A methodology for improving wind energy production in low wind speed regions, with a case study application in Iraq. Comput. Ind. Eng. 2019, 127, 89–102. [Google Scholar] [CrossRef]
- Liu, X.; Wang, L.; Tang, X. Optimized linearization of chord and twist angle profiles for fixed-pitch fixed-speed wind turbine blades. Renew. Energy 2013, 57, 111–119. [Google Scholar] [CrossRef]
- Sedaghat, A.; Mirhosseini, M. Aerodynamic design of a 300 kW horizontal axis wind turbine for province of Semnan. Energy Convers. Manag. 2012, 63, 87–94. [Google Scholar] [CrossRef]
- Plaza, B.; Bardera, R.; Visiedo, S. Comparison of BEM and CFD results for MEXICO rotor aerodynamics. J. Wind Eng. Ind.l Aerodyn. 2015, 145, 115–122. [Google Scholar] [CrossRef]
- Li, Y.; Paik, K.-J.; Xing, T.; Carrica, P.M. Dynamic overset CFD simulations of wind turbine aerodynamics. Renew. Energy 2012, 37, 285–298. [Google Scholar] [CrossRef]
- Lanzafame, R.; Mauro, S.; Messina, M. Wind turbine CFD modeling using a correlation-based transitional model. Renew. Energy 2013, 52, 31–39. [Google Scholar] [CrossRef]
- Rajvanshi, D.; Baig, R.; Pandya, R.; Nikam, K. Wind turbine blade aerodynamics and performance analysis using numerical simulations. In Proceedings of the 11th Asian International Conference on Fluid Machinery, Chennai, India, 21–23 November 2011. [Google Scholar]
- Moshfeghi, M.; Song, Y.J.; Xie, Y.H. Effects of near-wall grid spacing on SST-K-ω model using NREL Phase VI horizontal axis wind turbine. J. Wind Eng. Ind. Aerodyn. 2012, 107–108, 94–105. [Google Scholar] [CrossRef]
- El Kasmi, A.; Masson, C. An extended k–ε model for turbulent flow through horizontal-axis wind turbines. J. Wind Eng. Ind. Aerodyn. 2008, 96, 103–122. [Google Scholar] [CrossRef]
- AbdelSalam, A.M.; Ramalingam, V. Wake prediction of horizontal-axis wind turbine using full-rotor modeling. J. Wind Eng. Ind. Aerodyn. 2014, 124, 7–19. [Google Scholar] [CrossRef]
- Abdelsalam, A.M.; Boopathi, K.; Gomathinayagam, S.; Kumar, S.H.K.; Ramalingam, V. Experimental and numerical studies on the wake behavior of a horizontal axis wind turbine. J. Wind Eng. Ind. Aerodyn. 2014, 128, 54–65. [Google Scholar] [CrossRef]
- Siddiqui, M.S.; Rasheed, A.; Tabib, M.; Kvamsdal, T. Numerical analysis of NREL 5MW wind turbine: A study towards a better understanding of wake characteristic and torque generation mechanism. In Proceedings of the Journal of Physics: Conference Series, Denpasar, Indonesia, 23–24 August 2016; p. 032059. [Google Scholar]
- Rütten, M.; Penneçot, J.; Wagner, C. Unsteady Numerical Simulation of the Turbulent Flow around a Wind Turbine. In Progress in Turbulence III; Springer: Berlin, Germany, 2009; pp. 103–106. [Google Scholar]
- ANSYS. ANSYS Fluent Tutorial Guide, Release 18.0; ANSYS, Inc.: Pittsburgh, PA, USA, 2017. [Google Scholar]
- Argyropoulos, C.; Markatos, N. Recent advances on the numerical modelling of turbulent flows. Appl. Math. Model. 2015, 39, 693–732. [Google Scholar] [CrossRef]
- Rocha, P.A.C.; Rocha, H.H.B.; Carneiro, F.O.M.; Vieira da Silva, M.E.; Bueno, A.V. k–ω SST (shear stress transport) turbulence model calibration: A case study on a small scale horizontal axis wind turbine. Energy 2014, 65, 412–418. [Google Scholar] [CrossRef]
- Spalart, P.; Allmaras, S. A one-equation turbulence model for aerodynamic flows. In Proceedings of the 30th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 1992; p. 439. [Google Scholar]
- Wang, S.; Ingham, D.B.; Ma, L.; Pourkashanian, M.; Tao, Z. Turbulence modeling of deep dynamic stall at relatively low Reynolds number. J. Fluids Struct. 2012, 33, 191–209. [Google Scholar] [CrossRef]
- Hand, M.; Simms, D.; Fingersh, L.; Jager, D.; Cotrell, J.; Schreck, S.; Larwood, S. Unsteady Aerodynamics Experiment Phase VI: Wind Tunnel Test Configurations and Available Data Campaigns; National Renewable Energy Laboratory: Golden, CO, USA, 2001.
- Giguere, P.; Selig, M. Design of a Tapered and Twisted Blade for the NREL Combined Experiment Rotor; National Renewable Energy Laboratory: Golden, CO, USA, 1999.
- Akpinar, E.K.; Akpinar, S. A statistical analysis of wind speed data used in installation of wind energy conversion systems. Energy Convers. Manag. 2005, 46, 515–532. [Google Scholar] [CrossRef]
- Lawson, M.J.; Li, Y.; Sale, D.C. Development and verification of a computational fluid dynamics model of a horizontal-axis tidal current turbine. In Proceedings of the 30th International Conference on Ocean, Offshore and Arctic Engineering (ASME 2011), Denver, CO, USA, 11–17 November 2011; pp. 711–720. [Google Scholar]
- Somers, D.M. Design and Experimental Results for the S809 Airfoil; National Renewable Energy Laboratory: Golden, CO, USA, 1997.
- Bouhelal, A.; Smaili, A.; Guerri, O.; Masson, C. Numerical investigation of turbulent flow around a recent horizontal axis wind Turbine using low and high Reynolds models. J. Appl. Fluid Mech. 2018, 11, 151–164. [Google Scholar] [CrossRef]
- Bourdin, P.; Wilson, J.D. Windbreak aerodynamics: Is computational fluid dynamics reliable? Boundary-Layer Meteorol. 2008, 126, 181–208. [Google Scholar] [CrossRef]
- Infield, D.; Freris, L. Renewable Energy in Power Systems; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Manwell, J.F.; McGowan, J.G.; Rogers, A.L. Wind Energy Explained: Theory, Design and Application; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Katsigiannis, Y.A.; Stavrakakis, G.S. Estimation of wind energy production in various sites in Australia for different wind turbine classes: A comparative technical and economic assessment. Renew. Energy 2014, 67, 230–236. [Google Scholar] [CrossRef]
- Bai, C.-J.; Chen, P.-W.; Wang, W.-C. Aerodynamic design and analysis of a 10 kW horizontal-axis wind turbine for Tainan, Taiwan. Clean Technol. Environ. Policy 2016, 18, 1151–1166. [Google Scholar] [CrossRef]
- Rocha, P.A.C.; de Sousa, R.C.; de Andrade, C.F.; da Silva, M.E.V. Comparison of seven numerical methods for determining Weibull parameters for wind energy generation in the northeast region of Brazil. Appl. Energy 2012, 89, 395–400. [Google Scholar] [CrossRef]
- Seguro, J.; Lambert, T. Modern estimation of the parameters of the Weibull wind speed distribution for wind energy analysis. J. Wind Eng. Ind. Aerodyn. 2000, 85, 75–84. [Google Scholar] [CrossRef]
- Lydia, M.; Kumar, S.S.; Selvakumar, A.I.; Kumar, G.E.P. A comprehensive review on wind turbine power curve modeling techniques. Renew. Sustain. Energy Rev. 2014, 30, 452–460. [Google Scholar] [CrossRef]
- Yingcheng, X.; Nengling, T. Review of contribution to frequency control through variable speed wind turbine. Renew. Energy 2011, 36, 1671–1677. [Google Scholar] [CrossRef]
- Sale, D.C. HARP_Opt User’s Guide. NWTC Design Codes. 2010. Available online: http://wind.nrel.gov/designcodes/simulators/HARP_Opt/Lastmodified (accessed on 11 March 2020).
- Selig, M.S.; Coverstone-Carroll, V.L. Application of a genetic algorithm to wind turbine design. J. Energy Resour. Technol. 1996, 118, 22–28. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.-T.; Wang, Z.-G.; Huang, W.; Yan, L. Parameterization and optimization of hypersonic-gliding vehicle configurations during conceptual design. Aerosp. Sci. Technol. 2016, 58, 225–234. [Google Scholar] [CrossRef]
- Platt, A.; Buhl, M. Wt Perf User Guide for Version 3.05; National Renewable Energy Laboratory: Golden, CO, USA, 2012.
- Kröger, G.; Siller, U.; Dabrowski, J. Aerodynamic Design and Optimization of a Small Scale Wind Turbine. In Proceedings of the ASME Turbo Expo 2014: Turbine Technical Conference and Exposition, Dusseldorf, Germany, 16–20 June 2014. [Google Scholar]
- Ceyhan, O. Aerodynamic design and optimization of horizontal axis wind turbines by using BEM theory and genetic algorithm. Middle East Tech. Univ. 2008. Available online: http://etd.lib.metu.edu.tr/upload/12610024/index.pdf (accessed on 11 March 2020).
- Wang, L.; Tang, X.; Liu, X. Optimized chord and twist angle distributions of wind turbine blade considering Reynolds number effects. Wind Energy 2012. Available online: https://www.researchgate.net/profile/Lin_Wang120/publication/258994126_Optimized_chord_and_twist_angle_distributions_of_wind_turbine_blade_considering_Reynolds_number_effects/links/54ccebc10cf24601c08c6f46.pdf (accessed on 11 March 2020).
- Vučina, D.; Marinić-Kragić, I.; Milas, Z. Numerical models for robust shape optimization of wind turbine blades. Renew. Energy 2016, 87, 849–862. [Google Scholar] [CrossRef]
- Shen, X.; Yang, H.; Chen, J.; Zhu, X.; Du, Z. Aerodynamic shape optimization of non-straight small wind turbine blades. Energy Convers. Manag. 2016, 119, 266–278. [Google Scholar] [CrossRef] [Green Version]
- Hassanzadeh, A.; Hassanabad, A.H.; Dadvand, A. Aerodynamic shape optimization and analysis of small wind turbine blades employing the Viterna approach for post-stall region. Alex. Eng. J. 2016, 55, 2035–2043. [Google Scholar] [CrossRef] [Green Version]
- Seo, J.; Yi, J.-H.; Park, J.-S.; Lee, K.-S. Review of tidal characteristics of Uldolmok Strait and optimal design of blade shape for horizontal axis tidal current turbines. Renew. Sustain. Energy Rev. 2019, 113, 109273. [Google Scholar] [CrossRef]
- Hamada, K.; Smith, T.; Durrani, N.; Qin, N.; Howell, R. Unsteady flow simulation and dynamic stall around vertical axis wind turbine blades. In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 7–10 January 2008; p. 1319. [Google Scholar]
- Ge, M.; Tian, D.; Deng, Y. Reynolds number effect on the optimization of a wind turbine blade for maximum aerodynamic efficiency. J. Energy Eng. 2014, 142, 04014056. [Google Scholar] [CrossRef]
- Du, Z.; Selig, M.S. The effect of rotation on the boundary layer of a wind turbine blade. Renew. Energy 2000, 20, 167–181. [Google Scholar] [CrossRef]
- Launder, B.E.; Sharma, B. Application of the energy-dissipation model of turbulence to the calculation of flow near a spinning disc. Lett. Heat Mass Transf. 1974, 1, 131–137. [Google Scholar] [CrossRef]
- Shih, T.-H.; Liou, W.W.; Shabbir, A.; Yang, Z.; Zhu, J. A new k-ϵ eddy viscosity model for high reynolds number turbulent flows. Comput. Fluids 1995, 24, 227–238. [Google Scholar] [CrossRef]
- Yakhot, V.; Orszag, S.; Thangam, S.; Gatski, T.; Speziale, C. Development of turbulence models for shear flows by a double expansion technique. Phys. Fluids A Fluid Dyn. 1992, 4, 1510–1520. [Google Scholar] [CrossRef] [Green Version]
- Tikhomirov, V. Equations of turbulent motion in an incompressible fluid. In Selected Works of AN Kolmogorov; Springer: Berlin, Germany, 1991; pp. 328–330. [Google Scholar]
- Wilcox, D.C. Formulation of the kw turbulence model revisited. AIAA J. 2008, 46, 2823–2838. [Google Scholar] [CrossRef] [Green Version]
- Menter, F.R. Review of the shear-stress transport turbulence model experience from an industrial perspective. Int. J. Comput. Fluid Dyn. 2009, 23, 305–316. [Google Scholar] [CrossRef]
- Gatski, T.B.; Rumsey, C.L.; Manceau, R. Current trends in modelling research for turbulent aerodynamic flows. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 2389–2418. [Google Scholar] [CrossRef] [PubMed]
- Spalart, P.; Shur, M. On the sensitization of turbulence models to rotation and curvature. Aerosp. Sci. Technol. 1997, 1, 297–302. [Google Scholar] [CrossRef]
- Rahman, M.; Siikonen, T.; Agarwal, R. Improved low-Reynolds-number one-equation turbulence model. AIAA J. 2011, 49, 735–747. [Google Scholar] [CrossRef]
- Langtry, R.B.; Menter, F.R. Correlation-based transition modeling for unstructured parallelized computational fluid dynamics codes. AIAA J. 2009, 47, 2894–2906. [Google Scholar] [CrossRef]
- Calomino, F.; Alfonsi, G.; Gaudio, R.; D’Ippolito, A.; Lauria, A.; Tafarojnoruz, A.; Artese, S. Experimental and numerical study of free-surface flows in a corrugated pipe. Water 2018, 10, 638. [Google Scholar] [CrossRef] [Green Version]
- Xudong, W.; Shen, W.Z.; Zhu, W.J.; Sørensen, J.N.; Jin, C. Shape optimization of wind turbine blades. Wind Energy 2009, 12, 781–803. [Google Scholar] [CrossRef]
- Li, Y.; Yi, J.-H.; Sale, D. Recent improvement of optimization methods in a tidal current turbine optimal design tool. 2012 Oceans 2012, 1–8. [Google Scholar] [CrossRef]

















| Parameters | Value |
|---|---|
| Rated power | 20 kW |
| Blade diameter | 10.58 m |
| Number of blades | 3 blades |
| Hub height | 12.192 m |
| Pitch angle | 5° |
| Rotational direction | Counterclockwise |
| Rotational speed | 72 rpm |
| Power regulation | Stall regulation |
| (a) | |
| CPU | 2.9 GHz Intel Xeon E5-2690 (8 cores) 20 megabytes L3 QuickPath Interconnect (QPI) (max turbo frequency 3.8 GHz, min 3.3 GHz) |
| Random access memory (RAM) | 32 gigabytes 1600 MHz ECC DDR3-RAM (quad channel) |
| Memory | 2 × 1 terabyte 7200 rpm sata III hard drives (raid) |
| (b) | |
| Realizable k-ε | 4.15 h |
| Transition SST | 5.46 h |
| k-ω SST | 4.66 h |
| Spalart–Allmaras | 3.74 h |
| Wind Turbine Parameters | Value |
|---|---|
| Rotor diameter | 11 m |
| Rated power capacity | 20 kW |
| Number of blade segment | 30 m |
| Number of blades | 3 |
| Hub diameter | 0.6 |
| Hub distance from the bottom surface | 13 m |
| Air density | 1.225 kg/s |
| Radial Position | 1.25 | 1.535 | 2.345 | 3.565 | 5.5 |
| Twist angle (degree) | |||||
| Minimum | −10 | −10 | −10 | −10 | −10 |
| Maximum | 25 | 17 | 5 | 3 | −1 |
| Chord Length (m) | |||||
| Minimum | 0.5 | 0.1 | 0.1 | 0.1 | 0.1 |
| Maximum | 0.8 | 0.72 | 0.65 | 0.55 | 0.37 |
| Optimization Parameters | Value |
|---|---|
| Population size | 200 |
| Generation | 150 |
| The cross-over fraction | 0.25 |
| Error tolerance for the GA fitness values | 1 × 10−6 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khlaifat, N.; Altaee, A.; Zhou, J.; Huang, Y.; Braytee, A. Optimization of a Small Wind Turbine for a Rural Area: A Case Study of Deniliquin, New South Wales, Australia. Energies 2020, 13, 2292. https://doi.org/10.3390/en13092292
Khlaifat N, Altaee A, Zhou J, Huang Y, Braytee A. Optimization of a Small Wind Turbine for a Rural Area: A Case Study of Deniliquin, New South Wales, Australia. Energies. 2020; 13(9):2292. https://doi.org/10.3390/en13092292
Chicago/Turabian StyleKhlaifat, Nour, Ali Altaee, John Zhou, Yuhan Huang, and Ali Braytee. 2020. "Optimization of a Small Wind Turbine for a Rural Area: A Case Study of Deniliquin, New South Wales, Australia" Energies 13, no. 9: 2292. https://doi.org/10.3390/en13092292
APA StyleKhlaifat, N., Altaee, A., Zhou, J., Huang, Y., & Braytee, A. (2020). Optimization of a Small Wind Turbine for a Rural Area: A Case Study of Deniliquin, New South Wales, Australia. Energies, 13(9), 2292. https://doi.org/10.3390/en13092292