
Development of a Flexible Framework Multi-Design Optimization Scheme for a Hand Launched Fuel Cell-Powered UAV


Abstract
:1. Introduction
2. Technical Approach
2.1. Design Space Definition
2.2. Initial Aircraft Structural Design Sizing
3. UAV Preliminary Design
3.1. Powertrain Contributing Analyses
3.1.1. Hydrogen Tank Contributing Analysis
3.1.2. PEMFC Contributing Analysis
3.1.3. Air Supply Subsystem
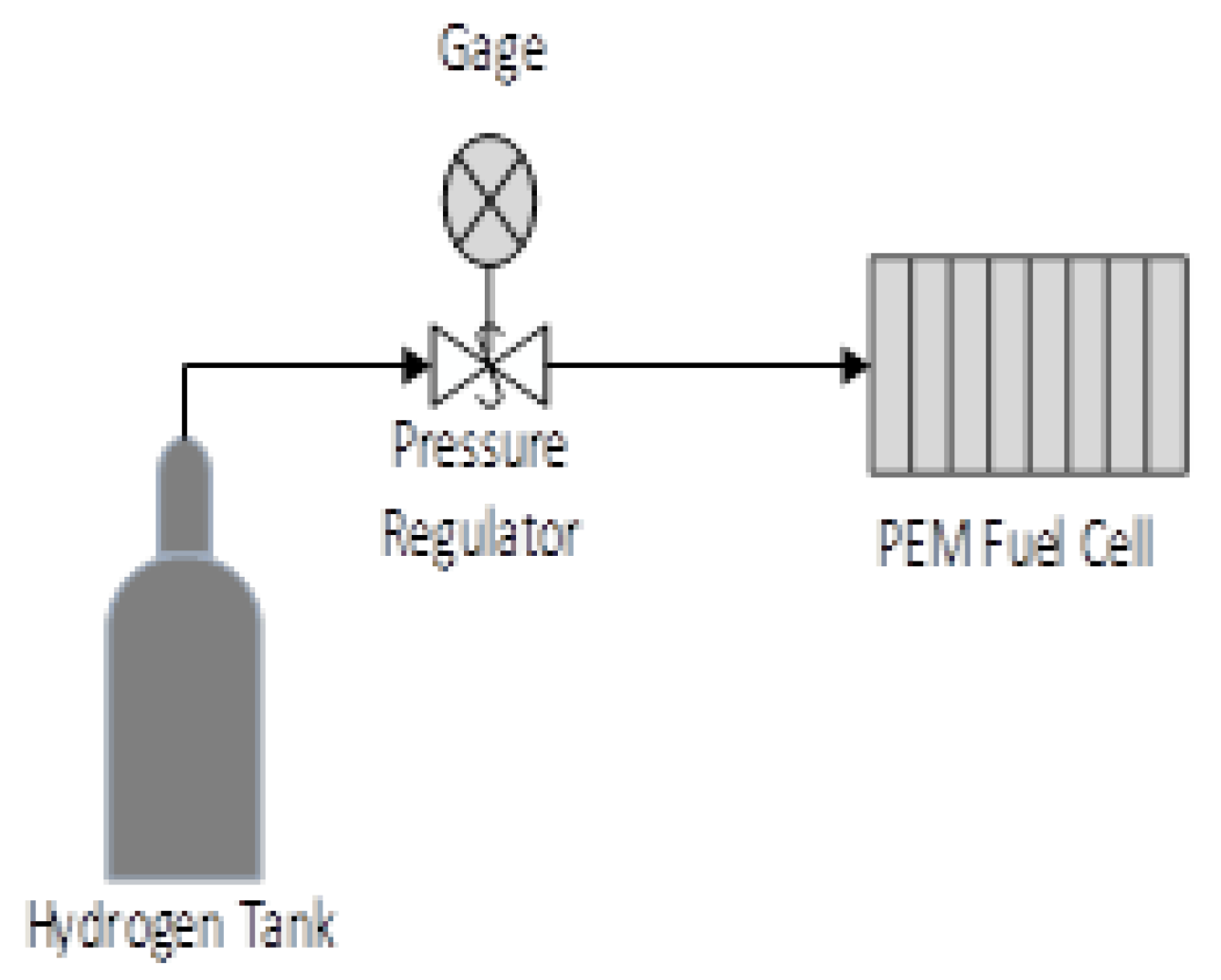
3.1.4. Hydrogen Supply Subsystem
3.1.5. Electric Motor Contributing Analysis
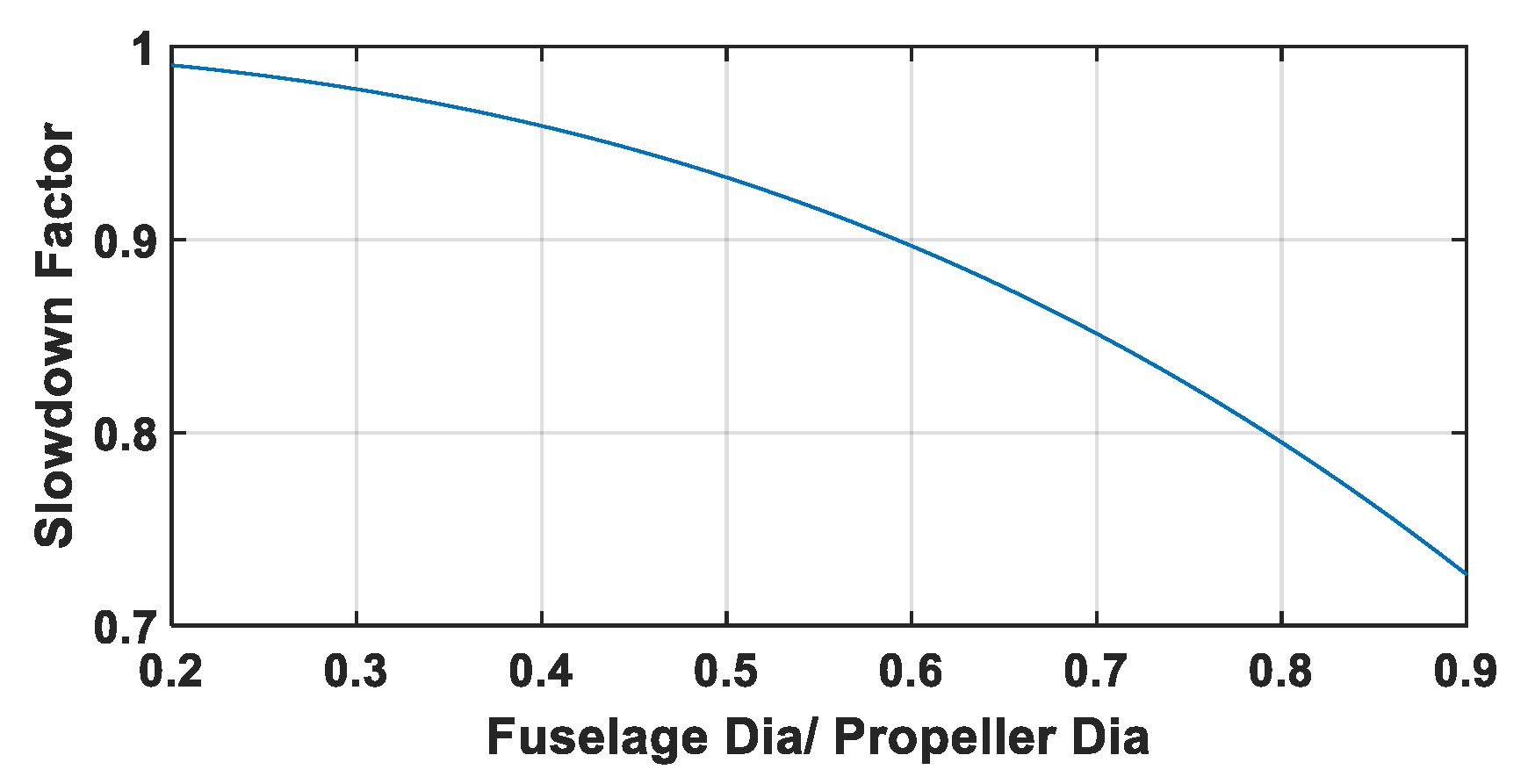
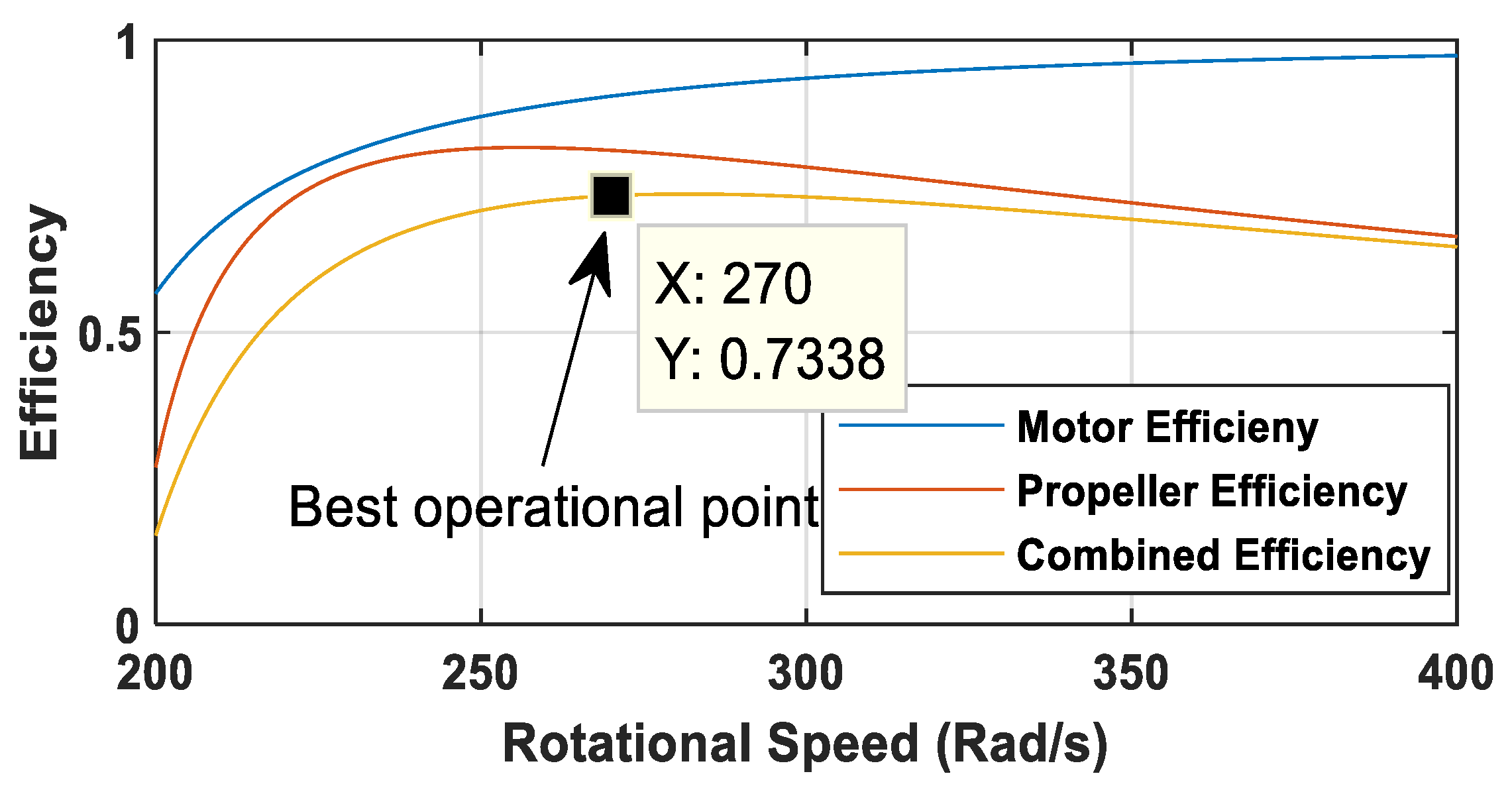
3.1.6. Propeller Contributing Analysis
3.1.7. Performance Contributing Analysis
3.2. UAV Airframe and Aerodynamics Contributing Analyses
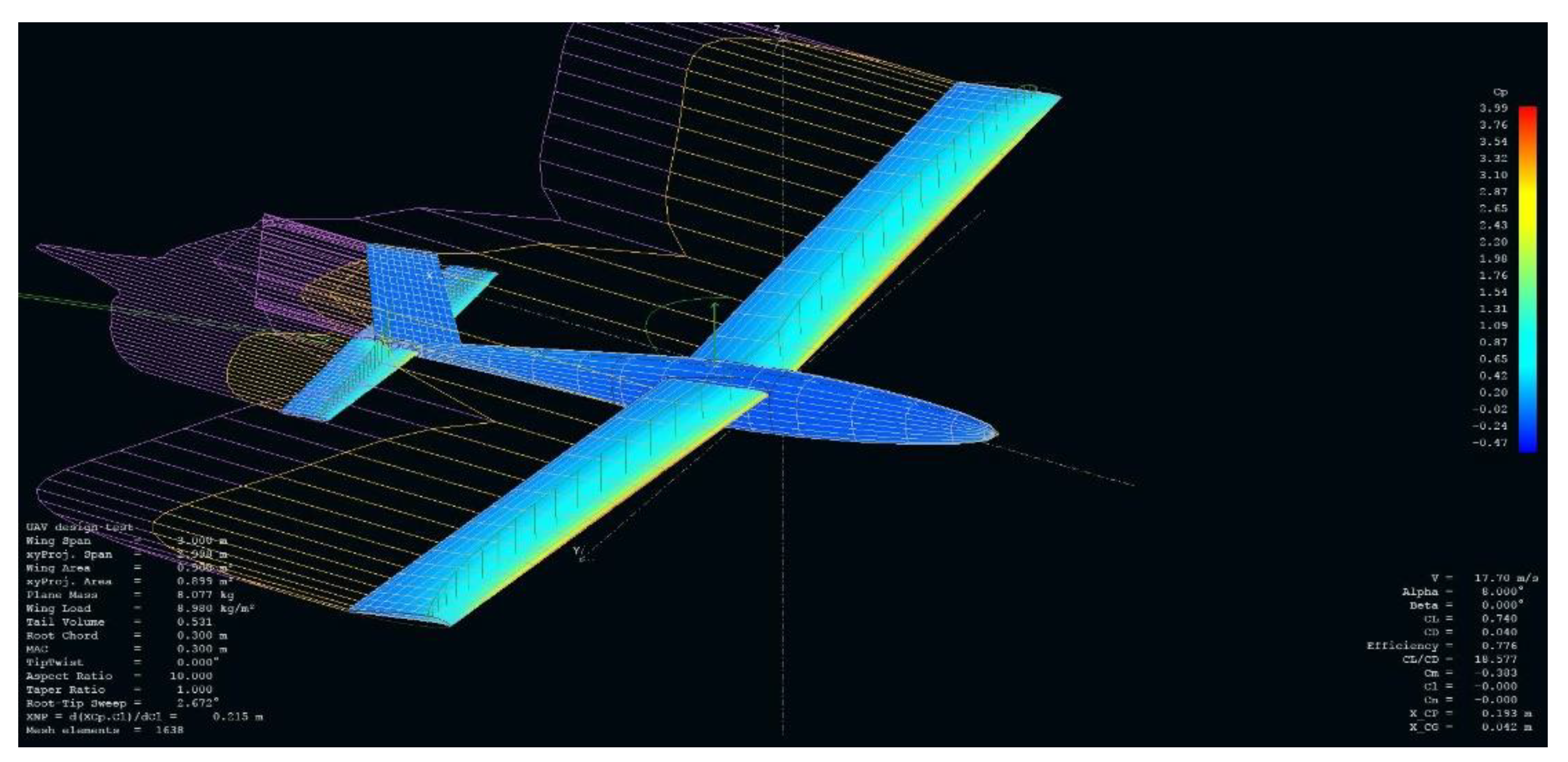
3.2.1. UAV Simulation Model
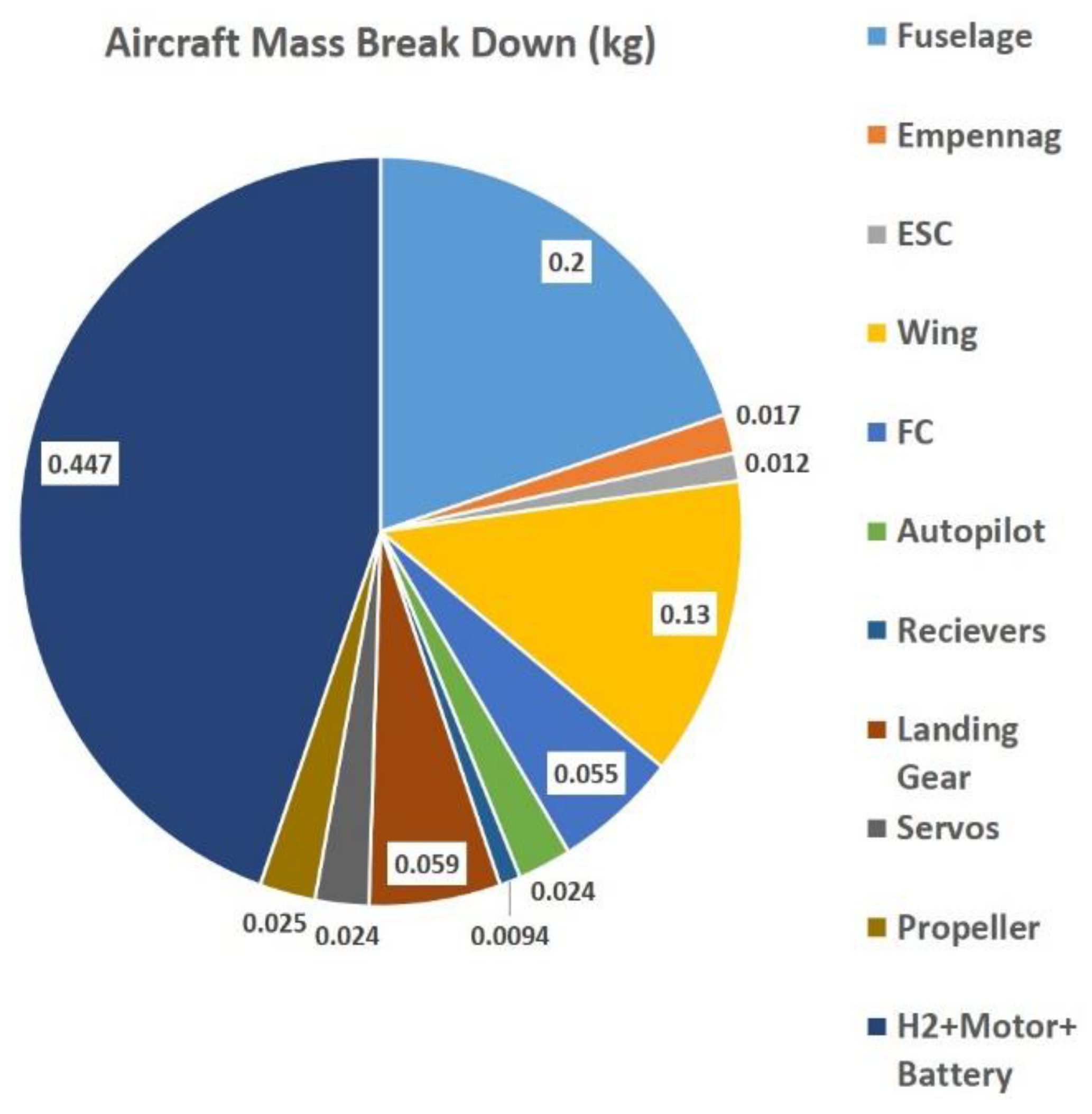
3.2.2. UAV Weight Tabulation CA
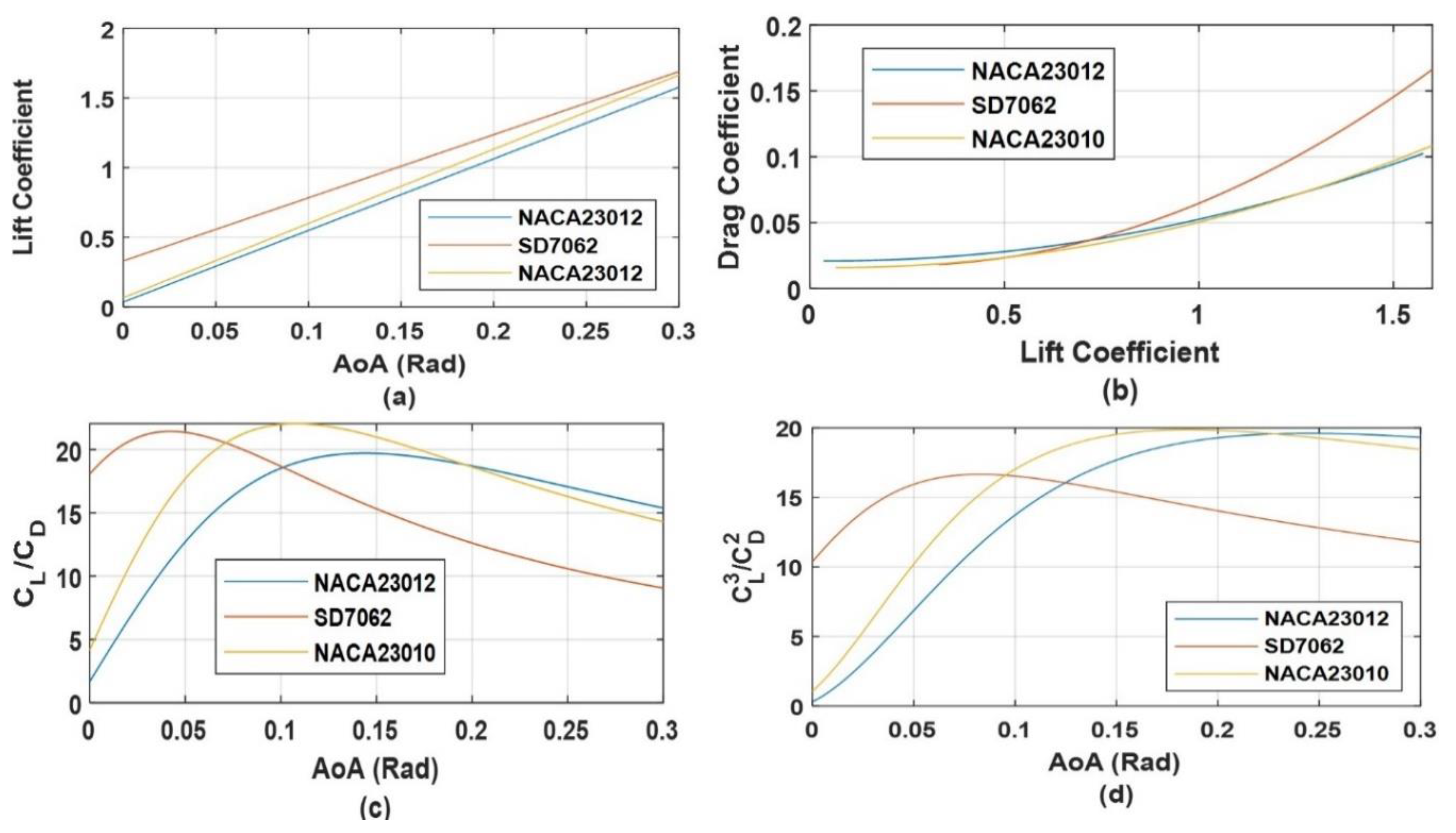
3.2.3. Aerodynamic Contributing Analysis
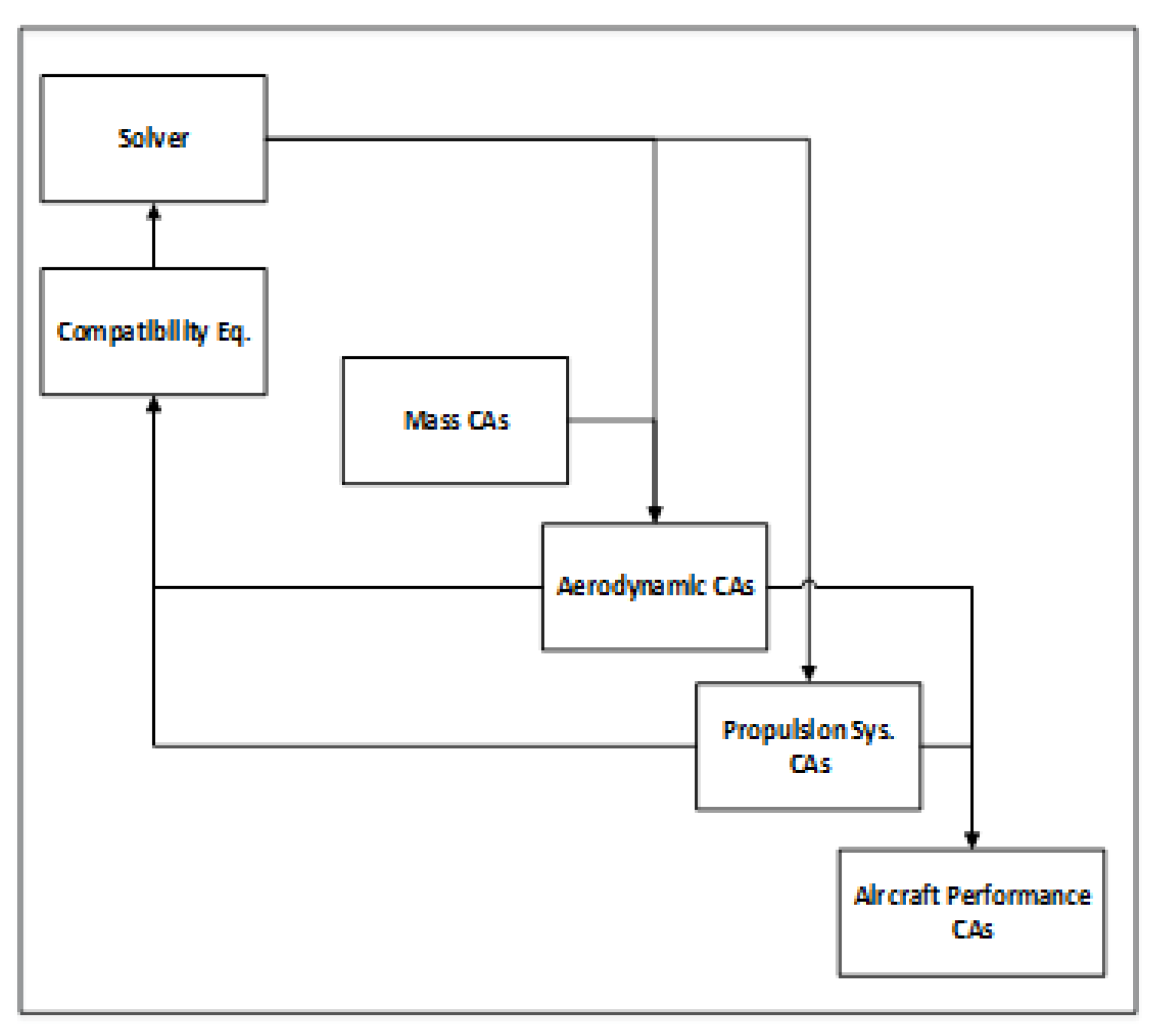
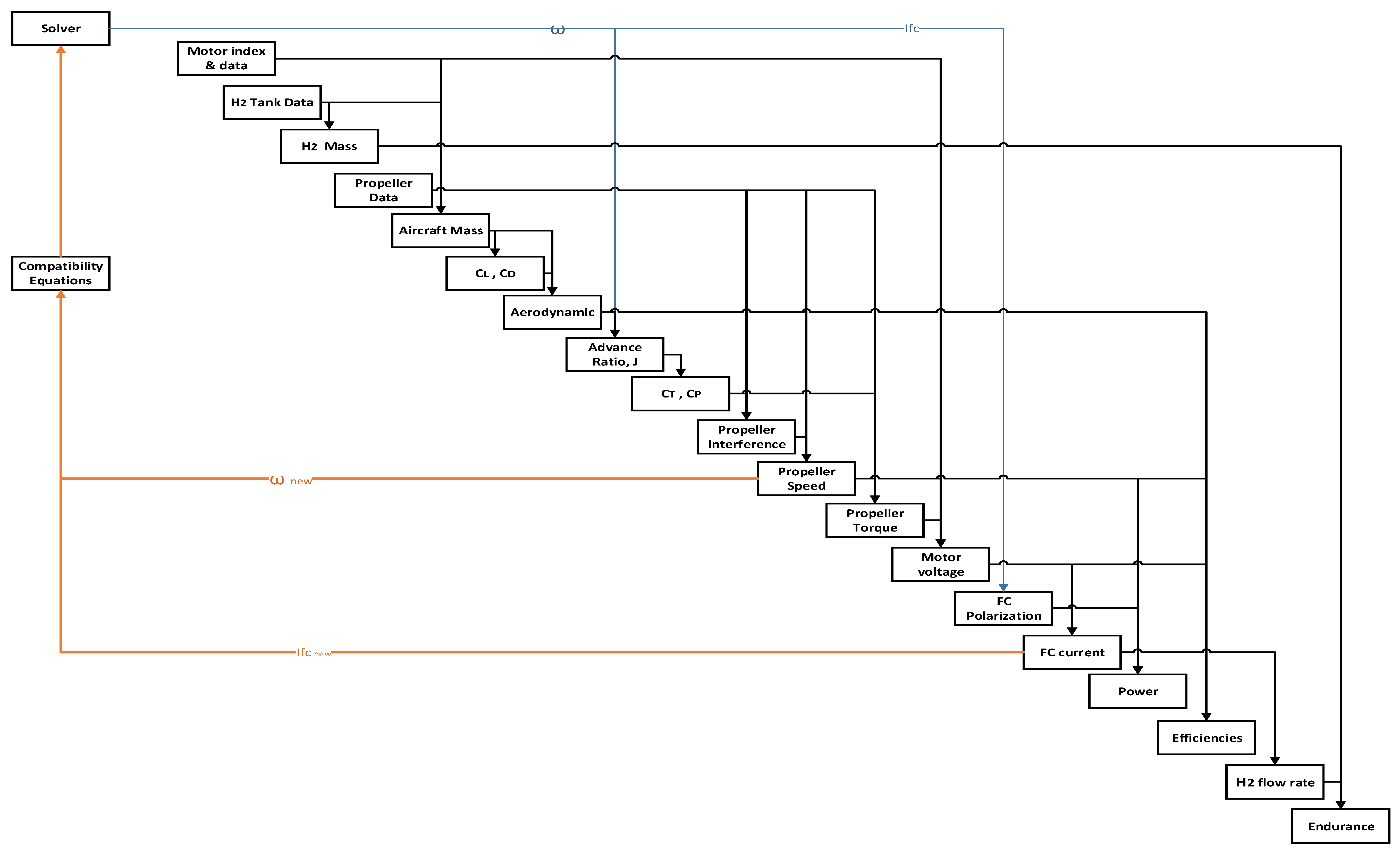
3.3. Design Structure Matrix
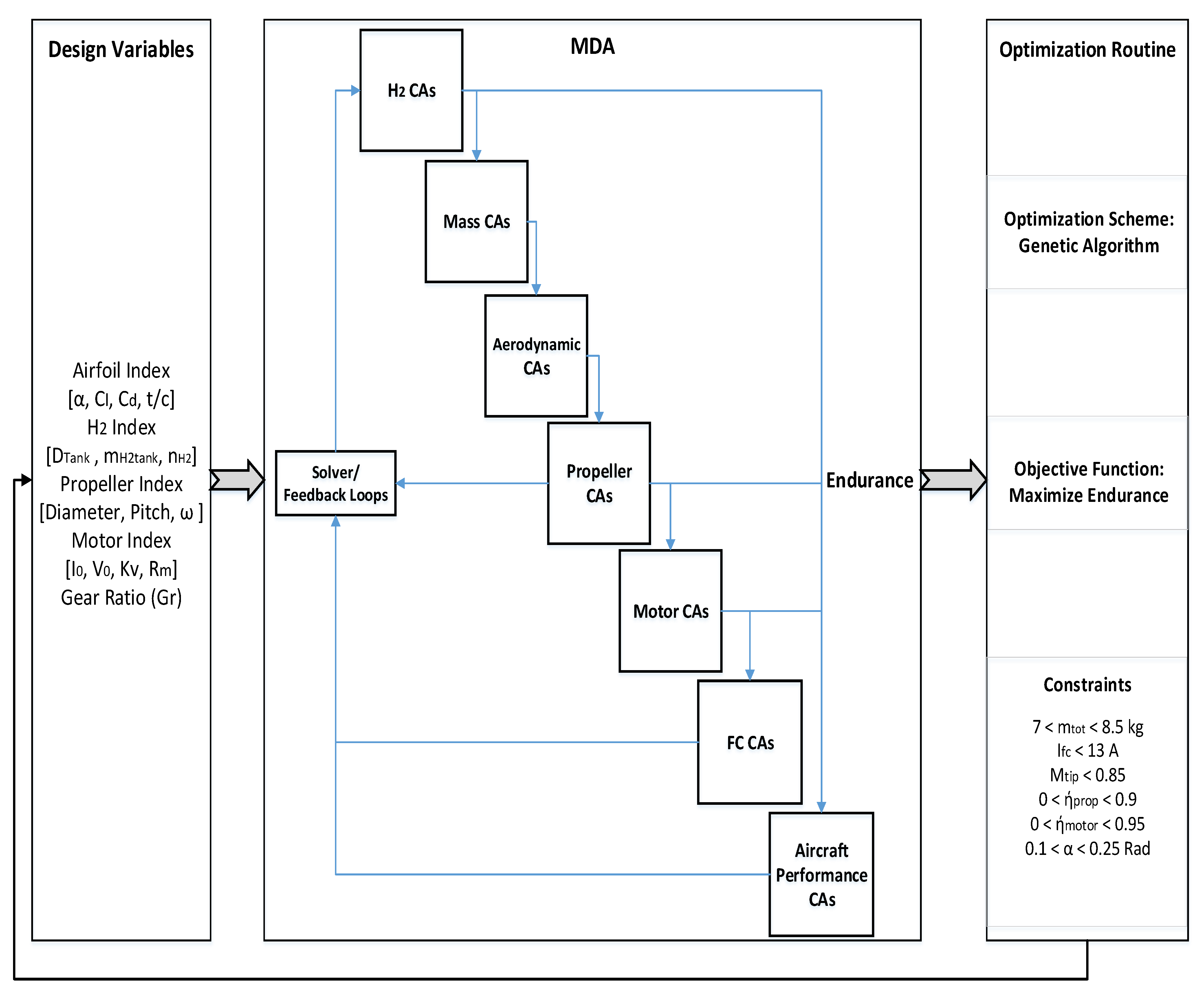
3.4. MDA with Simultaneous Analysis
4. UAV Detailed Design (Optimization)
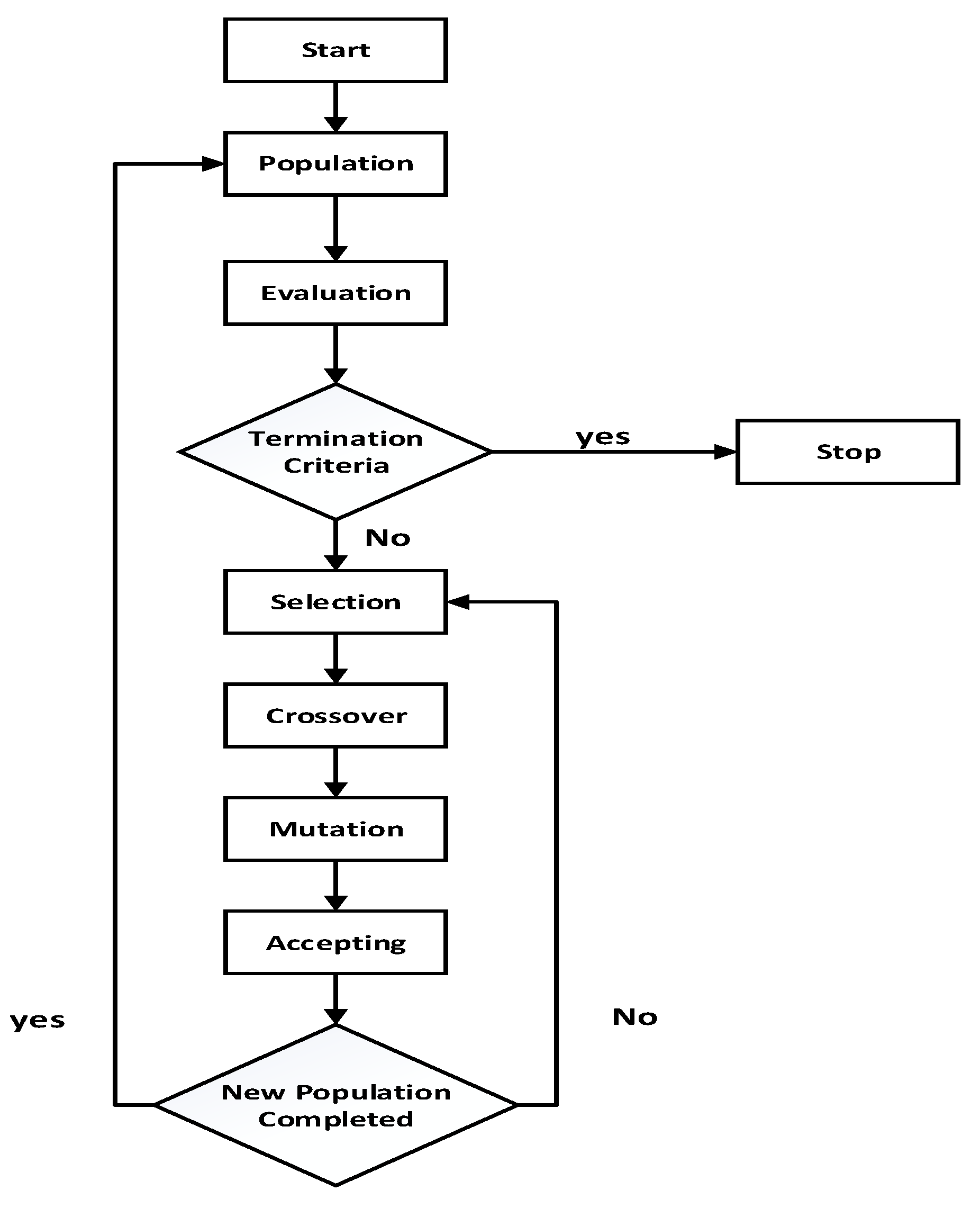
4.1. Genetic Algorithm Problem Formulation
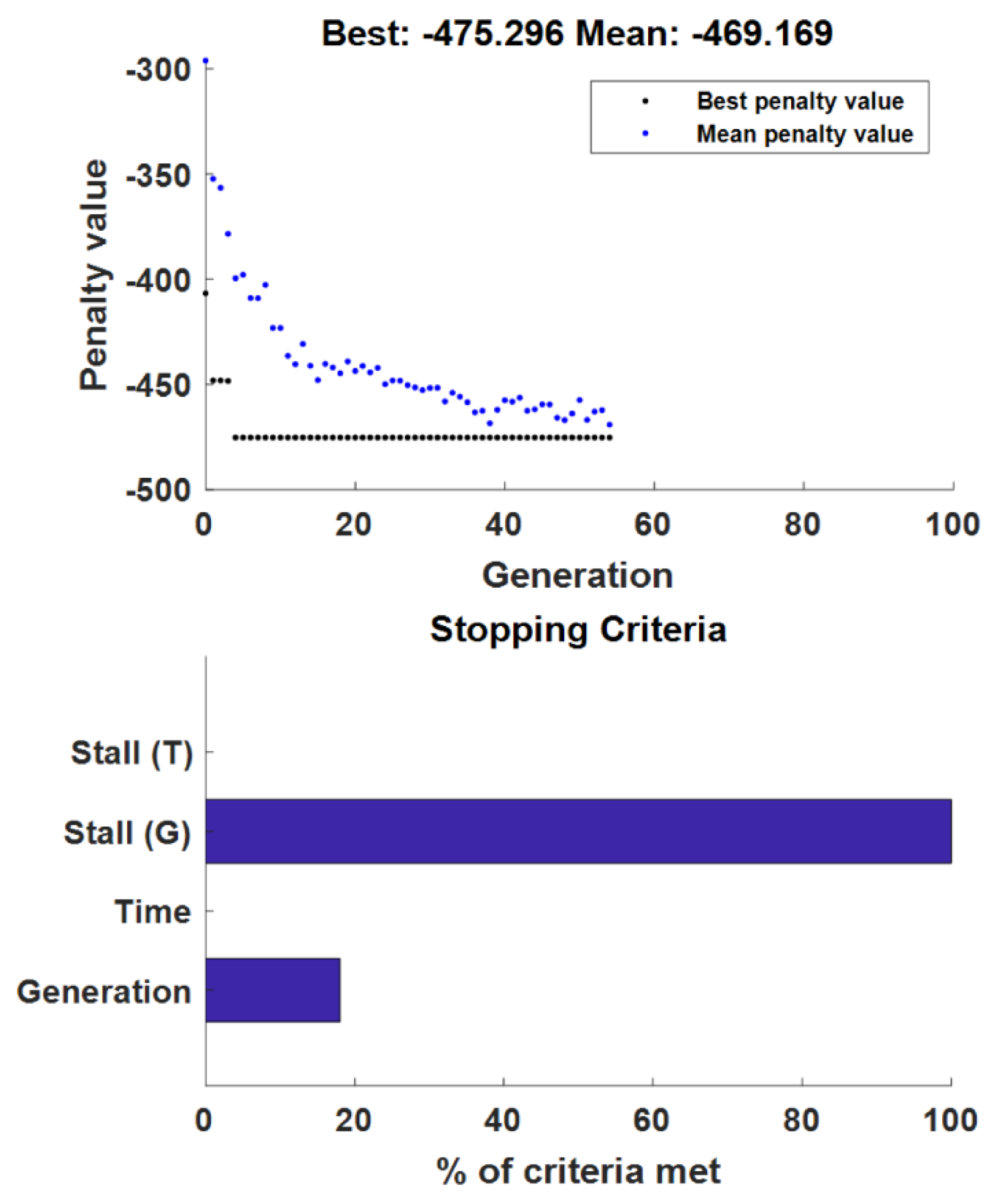
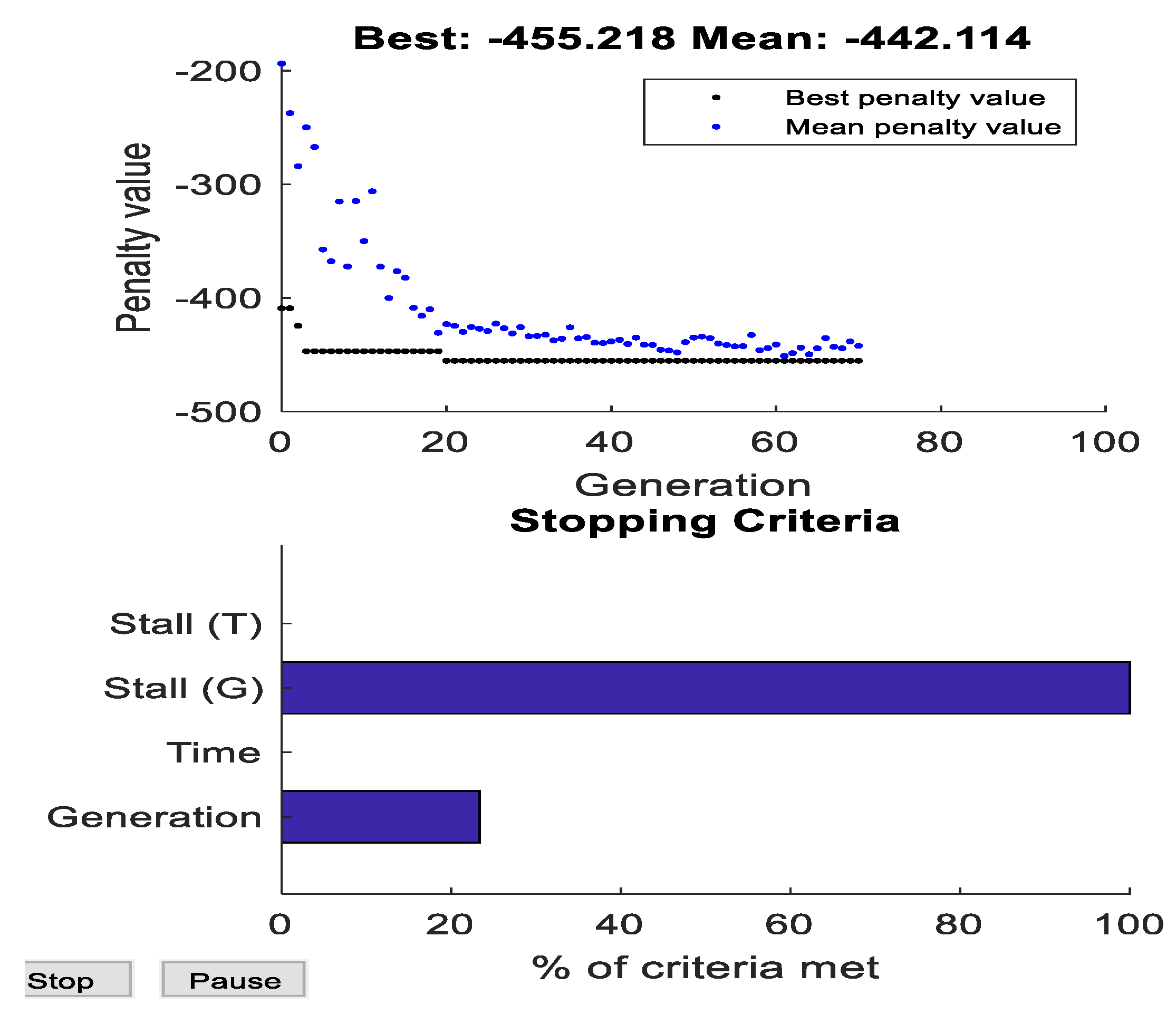
4.2. Optimization Results
5. Results’ Validation and Discussion
5.1. Wind Tunnel Tests
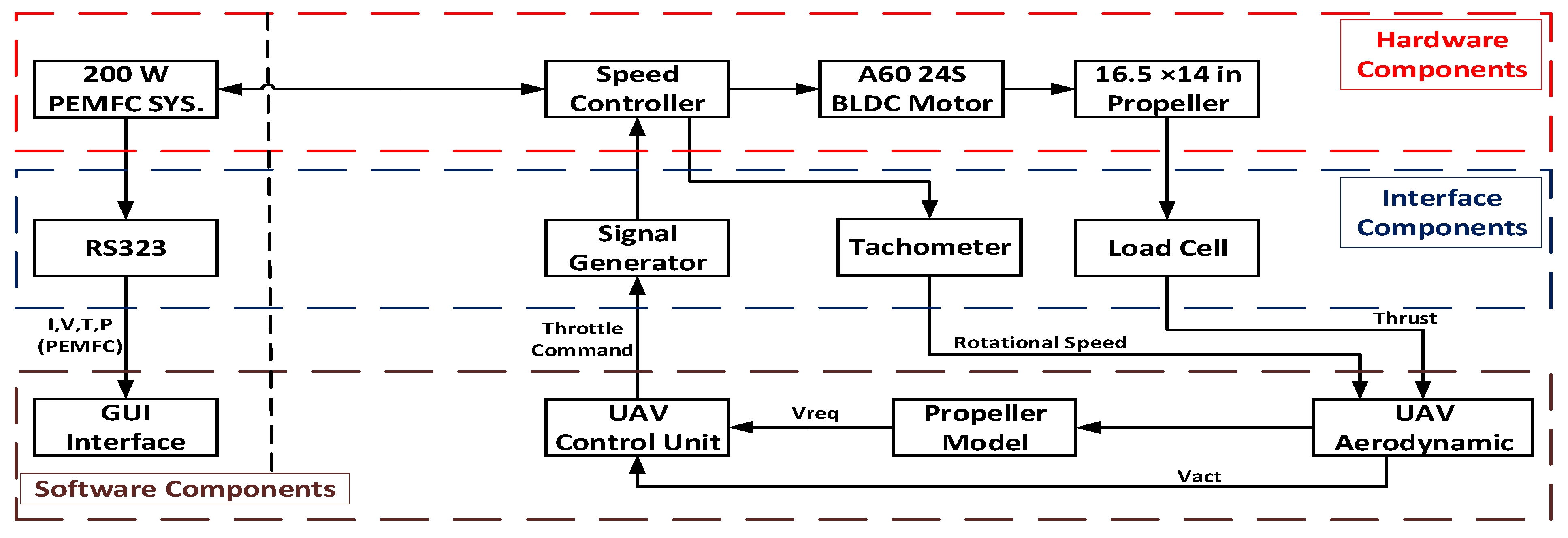
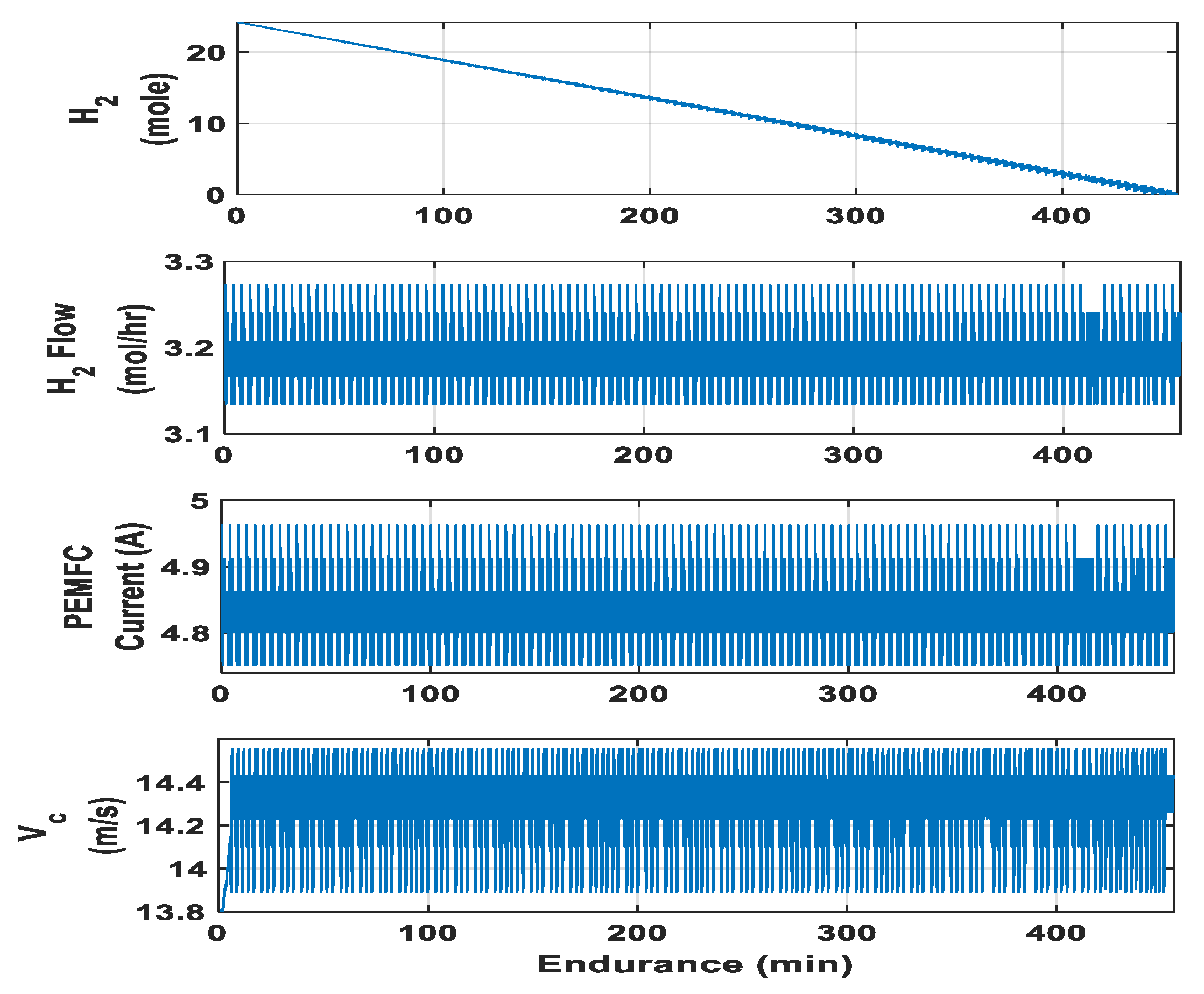
5.2. HiL Simulation Test
5.3. Discussion and Comparison of Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| zero lift slope for the airfoil, rad−1 | |
| wing span, m | |
| l | total coefficient of drag |
| total coefficient of lift | |
| total coefficient of thrust | |
| horizontal tail coefficient of volume | |
| vertical tail coefficient of volume | |
| specific heat | |
| l | total drag, N |
| l | speed controller duty cycle |
| fuselage diameter, m | |
| propeller diameter, m | |
| single cell output power, W | |
| E | endurance, seconds |
| e | Oswald efficiency |
| tank mounting/bosses/tubing mass fraction | |
| gear ratio | |
| fuel cell system feedback current, A | |
| motor current, A | |
| motor voltage constant, RPM. V−1 | |
| total horizontal tail length, m | |
| total vertical tail length, m | |
| air flow rate, kg/s | |
| hydrogen tank composite overwrap mass, kg | |
| hydrogen tank liner mass, kg | |
| mreg | regulator mass, kg |
| the hydrogen mass, kg | |
| total tank mass, kg | |
| hydrogen flow rate, mole.s−1 | |
| hydrogen consumption, mole | |
| oxygen consumption, mole | |
| number of cells in a PEMFC | |
| n | hydrogen content, mole |
| atmospheric pressure, atm | |
| air ambient pressure, Pa | |
| Pressure after fan, Pa | |
| propeller generated torque, N.m | |
| Rm | winding resistance, ohm |
| speed controller internal resistance | |
| r | cylinder radius, m |
| total area of lifting surface, m2 | |
| horizontal tail Surface area, m2 | |
| vertical tail Surface area, m2 | |
| total cylinder thickness, m | |
| motor output voltage, Volt | |
| fuel cell fan power, W | |
| liner load sharing factor of safety to yield | |
| drag coefficient for motor | |
| motor output torque, N.m | |
| torque of electric origin, N.m | |
| maximum shear stress, N. m2 | |
| fluid kinematic viscosity, m2.s−1 | |
| rotational speed of the propeller, rad.s−1 | |
| Air density at a certain flight altitude, kg.m−3 | |
| fuel cell stack efficiency | |
| efficiency of the electric motor | |
| ηp | propeller efficiency |
| Subscripts | |
| AR | aspect ratio |
| AoA | angle of attack |
| BLDC | brushless direct current motor |
| DSM | design structure matrix |
| HiL | hardware in the loop simulation test |
| MDA | multi-disciplinary analysis |
| MDO | multi-disciplinary design optimization |
| PEMFC | polymer electrolyte membrane fuel cell |
| MUAV | miniature unmanned aerial vehicle |
References
- Szabolcsi, R. Robust Control System Design for Small UAV Using H2-Optimization. Land Forces Acad. Rev. 2018, 23, 151–159. [Google Scholar] [CrossRef] [Green Version]
- Oktay, T.; Konar, M.; Onay, M.; Aydin, M.; Mohamed, M.A. Simultaneous small UAV and autopilot system design. Aircr. Eng. Aerosp. Technol. 2016, 88, 818–834. [Google Scholar] [CrossRef]
- Hannan, M.; Azidin, F.; Mohamed, A. Hybrid electric vehicles and their challenges: A review. Renew. Sustain. Energy Rev. 2014, 29, 135–150. [Google Scholar] [CrossRef]
- Wang, D.; Lv, H.; Wu, J. In-flight initial alignment for small UAV MEMS-based navigation via adaptive unscented Kalman filtering approach. Aerosp. Sci. Technol. 2017, 61, 73–84. [Google Scholar] [CrossRef]
- Jaeger, M.; Adair, D. Conceptual design of a high-endurance hybrid electric unmanned aerial vehicle. Mater. Today Proc. 2017, 4, 4458–4468. [Google Scholar] [CrossRef]
- Sliwinski, J.; Gardi, A.; Marino, M.; Sabatini, R. Hybrid-electric propulsion integration in unmanned aircraft. Energy 2017, 140, 1407–1416. [Google Scholar] [CrossRef]
- Ahn, H.; Ahn, J. Design and Analysis of a Solar-Power Mini-UAV for Extended Endurance at Low Altitude. Int. J. Aeronaut. Space Sci. 2019, 20, 561–569. [Google Scholar] [CrossRef]
- Choi, T.; Soban, D.; Mavris, D. Creation of a Design Framework for All-Electric Aircraft Propulsion Architectures. In Proceedings of the 3rd International Energy Conversion Engineering Conference, AIAA 2005–5549, San Francisco, CA, USA, 15–18 August 2005. [Google Scholar]
- Guerra, M.; Döll, C. Finite Time Tracking Control for a Small UAV Using Input-Output Linearization; IFAC-PapersOnLine: Toulouse, France, 2017; Volume 50, pp. 10280–10286. [Google Scholar] [CrossRef]
- Chianucci, F.; Disperati, L.; Guzzi, D.; Bianchini, D.; Nardino, V.; Lastri, C.; Rindinella, A.; Corona, P. Estimation of canopy attributes in beech forests using true colour digital images from a small fixed-wing UAV. Int. J. Appl. Earth Obs. Geoinf. 2016, 47, 60–68. [Google Scholar] [CrossRef] [Green Version]
- Rhoads, G.; Bradley, T.; Wagner, N.; Taylor, B.; Keen, D. Design and Flight Test Results for a 24 Hour Fuel Cell Unmanned Aerial Vehicle. In Proceedings of the 8th Annual International Energy Conversion Engineering Conference, AIAA 2010-6690, Nashville, TN, USA, 25–28 July 2010. [Google Scholar]
- Swider-Lyons, K.; Stroman, R.; Page, G.; Schuette, M.; Mackrell, J.; Rodgers, J. Hydrogen Fuel Cell Pro-pulsion for Long Endurance Small UAVs. In Proceedings of the AIAA Centennial of Naval Aviation Forum “100 Years of Achievement and Progress”, AIAA 2011-6975, Virginia Beach, VA, USA, 21–22 September 2011. [Google Scholar]
- Lindahl, P.; Moog, E.; Shaw, S.R. Simulation, Design, and Validation of an UAV SOFC Propulsion System. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2582–2593. [Google Scholar] [CrossRef]
- Wagner, N.; Boland, S.; Taylor, B.; Keen, D.; Nelson, J.; Bradley, T. Powertrain Design for Hand-Launchable Long Endurance Unmanned Aerial Vehicles. In Proceedings of the 47th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, AIAA 2011-6047, San Diego, CA, USA, 31 July–3 August 2011. [Google Scholar]
- Baldic, J.; Osenar, P.; Lauder, N.; Launie, P. Fuel cell systems for long duration electric UAVs and UGVs. SPIE Def. Secur. Sens. 2010, 7707, 770703. [Google Scholar] [CrossRef]
- Daud, W.; Rosli, R.; Majlan, E.; Hamid, S.; Mohamed, R.; Husaini, T. PEM fuel cell system control: A review. Renew. Energy 2017, 113, 620–638. [Google Scholar] [CrossRef]
- Verstraete, D.; Cazzato, L.; Romeo, G. Preliminary Design of a Fuel Cell Based Hybrid Electrical UAV. In Proceedings of the 28th Congress of the ICAS, Paper ICAS 2012-1.8.2, Brisbane, Australia, 28 September 2012; Available online: https://www.icas.org/ICAS_ARCHIVE/ICAS2012/PAPERS/654.PDF (accessed on 22 January 2021).
- Furrutter, M.K.; Meyer, J. Small fuel cell powering an unmanned aerial vehicle. In Proceedings of the AFRICON 2009, Nairobi, Kenya, 23–25 September 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Lapeña-Rey, N.; Blanco, J.; Ferreyra, E.; Lemus, J.; Pereira, S.; Serrot, E. A fuel cell powered unmanned aerial vehicle for low altitude surveillance missions. Int. J. Hydrog. Energy 2017, 42, 6926–6940. [Google Scholar] [CrossRef]
- Moffitt, B.; Bradley, T.; Mavris, D.; Parekh, D. Design Space Exploration of Small-Scale PEM Fuel Cell Long Endurance Aircraft. In Proceedings of the 6th AIAA Aviation Technology, Integration and Operations Conference (ATIO), AIAA 2006-7701, Wichita, KS, USA, 27 September 2006. [Google Scholar]
- Raymer, D. Aircraft Design, 4th ed.; AIAA: Washington, DC, USA, 2006; pp. 369–373. [Google Scholar]
- Khandelwal, B.; Karakurt, A.; Sekaran, P.R.; Sethi, V.; Singh, R. Hydrogen powered aircraft: The future of air transport. Prog. Aerosp. Sci. 2013, 60, 45–59. [Google Scholar] [CrossRef]
- Kulkarni, S.V.; Zweben, C.H. Composites in Pressure Vessels and Piping, Presented at the Energy Technology Conference; ASME: Houston, TX, USA, 1977. [Google Scholar]
- Nisbett, J.K.; Budynas, R.G. Shigley’s Mechanical Engineering Design, 7th ed.; McGraw-Hill: New York, NY, USA; pp. 593–598.
- MacQuarrie, D.A.; Simon, J.D. Physical Chemistry: A Molecular Approach, 2nd ed.; University Science Books: Sausalito, CA, USA, 1997; pp. 328–329. [Google Scholar]
- Bayrak, Z.U.; Kaya, U.; Oksuztepe, E. Investigation of PEMFC performance for cruising hybrid powered fixed-wing electric UAV in different temperatures. Int. J. Hydrog. Energy 2020, 45, 7036–7045. [Google Scholar] [CrossRef]
- Barbir, F. PEM Fuel Cells Theory and Practice, 2nd ed.; Elsevier: Boston, MA, USA, 2014; pp. 159–161. [Google Scholar]
- Hauer, K.H. Analysis Tool for Fuel Cell Vehicle Hardware and Software (Controls) with an Application to Fuel Economy Comparisons of Alternative System Designs. Ph.D. Thesis, University of California, Davis, CA, USA, 2001. [Google Scholar]
- Gupta, R.B. Hydrogen Fuel Production Transport and Storage, 1st ed.; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Ogasawara, S.; Akagi, H. An approach to position sensorless drive for brushless DC motors. IEEE Trans. Ind. Appl. 1991, 27, 928–933. [Google Scholar] [CrossRef]
- Yedamale, P. Brushless DC (BLDC) Motor Fundamentals, 3rd ed.; Microchip Technologies: Chandler, AZ, USA, 2003; pp. 15–18. [Google Scholar]
- Toliyat, H.; Kliman, G. Handbook of Electric Motors, 3rd ed.; Taylor & Francis: New York, NY, USA, 2004; pp. 115–118. [Google Scholar]
- Phillips, W. Mechanics of Flight, 1st ed.; John Wily & Sons: Hoboken, NJ, USA, 2004; pp. 165–168. [Google Scholar]
- Moffitt, B.; Bradley, T.; Parekh, D.; Mavris, D. Validation of Vortex Propeller Theory for UAV Design with Uncertainty Analysis. In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, AIAA 2008-406, Reno, Nevada, USA, 10 January 2008. [Google Scholar]
- Jin, K.; Ruan, X.; Yang, M.; Xu, M. A Hybrid Fuel Cell Power System. IEEE Trans. Ind. Electron. 2008, 56, 1212–1222. [Google Scholar] [CrossRef]
- Lowry, J.T. The Bootstrap Approach to Aircraft Performance (Part Two—Constant-Speed Propeller Airplanes). Available online: https://www.avweb.com/features_old/the-bootstrap-approach-to-aircraft-performancepart-two-constant-speed-propeller-airplanes/ (accessed on 30 January 2021).
- Anderson, J.D.; Hunter, L.P. Introduction to Flight. Phys. Today 1987, 40, 125. [Google Scholar] [CrossRef] [Green Version]
- Lagorse, J.; Paire, D.; Miraoui, A. Sizing optimization of a stand-alone street lighting system powered by a hybrid system using fuel cell, PV and battery. Renew. Energy 2009, 34, 683–691. [Google Scholar] [CrossRef]
- Maheri, A.; Noroozi, S.; Vinney, J. Application of combined analytical/FEA coupled aero-structure simulation in design of wind turbine adaptive blades. Renew. Energy 2007, 32, 2011–2018. [Google Scholar] [CrossRef]
- Dawoud, S.M.; Lin, X.; Okba, M.I. Hybrid renewable microgrid optimization techniques: A review. Renew. Sustain. Energy Rev. 2018, 82, 2039–2052. [Google Scholar] [CrossRef]
- Dufo-López, R.; Bernal-Agustín, J.L. Design and control strategies of PV-Diesel systems using genetic algorithms. Sol. Energy 2005, 79, 33–46. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute | Alt1 | Alt2 | Alt3 |
|---|---|---|---|
| Vehicle | conventional | flying wing | canard |
| Wing Position | low | Mid | High |
| Planform | Straight | Tapered | Elliptical |
| Aspect Ratio | low | Mid | High |
| Tail | Conventional | T-tail | V-tail |
| Fuselage | Cylindrical | Elliptical | |
| Prop Position | Pusher | Tractor | |
| Structure | Wood | Composite | Combination |
| Landing gear | Fixed | Retractable | None |
| Hydrogen Storage | Chemical Hydride | Carbon Fiber Tank | Aluminum Composite tank |
| Design Variable | Value | Unit |
|---|---|---|
| Wing Loading | 7.5 | Kg/m2 |
| Wing Area | 0.9 | m2 |
| Wing Span | 3 | m |
| Aspect Ratio | 10 | - |
| Taper Ratio | 1 | - |
| Root chord, Tip chord | 0.3 | m |
| Mean aerodynamic chord | 0.3 | m |
| Dihedral angle | 2 | degrees |
| Vertical Tail | Horizontal Tail | ||
|---|---|---|---|
| Vertical Tail area | 0.06 m2 | Horizontal Tail area | 0.14 m2 |
| Vertical Tail Span | 0.27 m | Horizontal Tail Span | 0.84 m |
| Aspect Ratio Vertical Tail | 5 | Aspect Ratio Horizontal Tail | 5 |
| Taper Ratio | 0.8 | Taper Ratio | 0.7 |
| Tail Volume | 0.02 | Tail Volume | 0.5185 |
| Length from Vertical tail AC to CG | 0.9 m | Length from Horizontal tail AC to C | 1 m |
| Variable | Value (mm) |
|---|---|
| Length | 1750 |
| Max Width and Height | 180 |
| Length/width | 9.722 |
| Design Variable | Value | Units |
|---|---|---|
| Airfoil index | 1–4 | Unit less |
| Motor index | 1–42 | Unit less |
| Propeller index | 1–57 | Unit less |
| Hydrogen tank diameter Hydrogen tank Length | 0–180 0–350 | mm |
| Gear ratio | 1–10 | Unit less |
| FC Current | 0–13 | A |
| Design Parameter | Value | Unit |
|---|---|---|
| Altitude | 200 | m |
| Air density | 1.225 | kg/m3 |
| Viscosity | 0.000015 | m3/s |
| Gravity | 9.81 | N/kg |
| Wing surface area | 0.9 | m2 |
| Faraday constant | 26.801 | A.h/mol |
| Ideal gas constant | 8.314472 | J/mol. K |
| Hydrogen utilization | 0.9 | Unit less |
| Air temperature | 298.15 | K |
| Design Variable | Max Endurance | Max Range | Units/Component |
|---|---|---|---|
| Airfoil index | 3 | 3 | NACA23010 |
| Motor index | 6 | 6 | Unit Less |
| Propeller index | 8 | 6 | Unit less |
| Hydrogen tank index | 8 | 8 | 130 mm × 300 mm |
| Gear ratio | 1 | 1 | Unit less |
| Fuel cell current | 3.66 | 3.46 | A |
| Propeller speed | 299.44 | 333.45 | Rad/s |
| Time | 475.3 | 455.2 | min |
| Design Variable | Max Endurance | Max Range | Unit |
|---|---|---|---|
| Propeller diameter | 16.5 | 16 | in |
| Propeller pitch | 14 | 12 | in |
| Propeller advance ratio | 0.669 | 0.739 | - |
| Hydrogen tank diameter | 0.13 | 0.13 | m |
| Hydrogen tank mass | 1.55 | 1.55 | kg |
| Cruise velocity | 13 | 16.3 | m/s |
| Thrust required | 5.23 | 4.55 | N |
| Propeller torque | 0.276 | 0.25 | N.m |
| Aircraft total mass | 7.06 | 7.06 | kg |
| Coefficient of lift | 1.08 | 0.713 | - |
| Coefficient of drag | 0.0568 | 0.0325 | - |
| Angle of attack | 0.192 | 0.122 | Rad |
| Hydrogen content | 20.17 | 20.17 | mole |
| Hydrogen flow rate | 2.546 | 2.66 | mole/hr |
| Propeller efficiency | 84.7% | 87% | - |
| Motor efficiency | 87.5% | 88% | - |
| Fuel cell voltage | 27.48 | 27.35 | V |
| Motor voltage | 14.25 | 16.32 | V |
| Motor current | 5.77 | 2.23 | A |
| Power | 79.74 | 83.34 | W |
| Instrument | Type | Measured Quantity | Unit | Accuracy |
|---|---|---|---|---|
| Load Cell | ELFF-T2M-100N from Measurement Specialties | Thrust | N | |
| Pressure Transducer | MPXV7002 MPXA6115A | Dynamic Pressure Ambient absolute Pressure | kPa | |
| Electronic Speed Controller Datalog | Phoenix ICE HV 85 | Rotational Speed | RPM | |
| Power supply Ammeter | DT9205A | Current | A | |
| Power Supply Voltmeter | DT9205A | Voltage | V | |
| Thermocouple | ES545892 | Temperature | Celsius | |
| RS-232 cable | 19,200, 8 bit, parity-none, 1 stop bit | Hydrogen Flow Rate, output power | L/min W | - |
| Parameter | Optimization | Experiment | |
|---|---|---|---|
| Fuel Cell Current (A) | 3.46 | 3.51 | 1.425 |
| Propeller Speed (Rad/s) | 333.45 | 325.28 | 2.5 |
| Ct | 0.0510 | 0.0522 | 2.3 |
| J | 0.739 | 0.813 | 9.1 |
| Cruise Velocity (m/s) | 16 | 17.18 | 6.432 |
| Thrust Required (N) | 4.55 | 4.583 | 0.72 |
| Hydrogen flow rate (mole/h) | 2.66 | 2.83 | 6.01 |
| Fuel Cell Voltage (V) | 27.35 | 27.55 | 0.726 |
| Power (W) | 83.34 | 81.28 | 1.08 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alrayes, Z.O.; Gadalla, M. Development of a Flexible Framework Multi-Design Optimization Scheme for a Hand Launched Fuel Cell-Powered UAV. Energies 2021, 14, 2951. https://doi.org/10.3390/en14102951
Alrayes ZO, Gadalla M. Development of a Flexible Framework Multi-Design Optimization Scheme for a Hand Launched Fuel Cell-Powered UAV. Energies. 2021; 14(10):2951. https://doi.org/10.3390/en14102951
Chicago/Turabian StyleAlrayes, Zaid O., and Mohamed Gadalla. 2021. "Development of a Flexible Framework Multi-Design Optimization Scheme for a Hand Launched Fuel Cell-Powered UAV" Energies 14, no. 10: 2951. https://doi.org/10.3390/en14102951
APA StyleAlrayes, Z. O., & Gadalla, M. (2021). Development of a Flexible Framework Multi-Design Optimization Scheme for a Hand Launched Fuel Cell-Powered UAV. Energies, 14(10), 2951. https://doi.org/10.3390/en14102951