2.1.2. Linearization
In order to build a thermal resistance matrix, the superposition principle must be applied, which is only possible in linear systems. However, only the thermal conduction is linear while convection and radiation are non-linear [
23,
24]. This effect is shown in
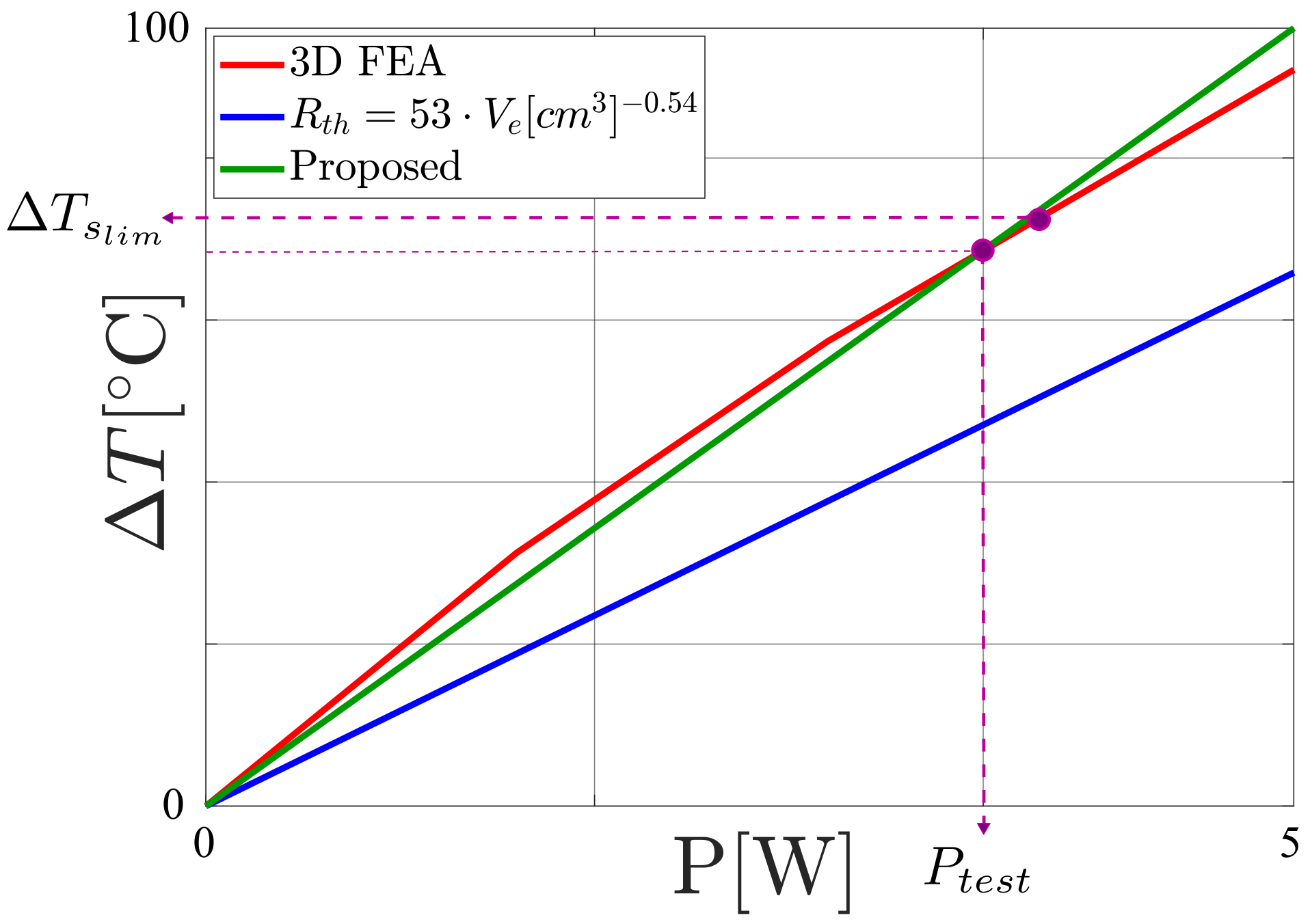
Figure 1, where the temperature rise of a certain magnetic core, exposed to natural convection and radiation, is depicted for different power losses. Contrary to semiconductors, where the conductive heat transfer is dominant due to their reduced size and encapsulation, the evolution of this temperature rise is clearly non-linear because the magnetic components are more exposed to convection and radiation.
Therefore, the system must be linearized and a proper thermal operating point must be selected since the slope of the linearized ‘resistance’ will change accordingly. To achieve realistic results, the thermal operating point must be equal (or close) to the limit temperature rise of the corresponding object,
(see
Figure 1). Each object can have a different
, depending on the materials and the specifications of the project.
By chosing this for each object, a value of power losses per object will be calculated so that a thermal resistance per object can be obtained to characterise its temperature rise from to —assuming a linear behaviour—, as explained in the following steps.
As a summary, this steps consists only in choosing the maximum allowed (or limit) temperature rise, , for each object.
2.1.3. Calculation for the Magnetic Core, the Windings and the Passive Objects
The thermal resistance is equal to the temperature rise divided by the power losses (or heat) flowing through an object if the system is linear, according to [
23,
24]. To obtain that thermal resistance, certain test power losses (
, in Watts) are injected and the subsequent temperature rise is measured. For semiconductors, a common choice consists of making
equal to the maximum rated power of the device, given by the manufacturers.
However, selecting for each part of a magnetic component is not obvious due to the non-linear behaviour explained in the previous step. As the temperature rise of each object must be equal (or close) to its , the value of must be selected accordingly. Two methods can be used to obtain : by trial and error in simulation, which is time-consuming and therefore not recommended, or using basic heat transfer equations and some geometrical approximations, which is explained next.
For the magnetic core,
is calculated in Equation (
2) using the convection and radiation expressions from the external surfaces of the core to the ambient, which are defined in Equations (
3) and (
4), respectively:
where
and
are the heat transferred by convection and radiation (in Watts), respectively;
is the external heat exchange surface exposed to the ambient, in squared meters;
is the relative emissivity of the object;
is the Stefan-Boltzmann constant (
); and
is the film factor coefficient corresponding to each surface, in W/m
K. The ambient temperature (
) and
must be expressed in Kelvin.
The typical film factors for natural convection are shown in
Table 1. The surfaces in contact with a PCB, which are considered adiabatic, are neglected in this step. However, if the cooling capability of heatsinks and/or forced convection are considered, a simplified film factor must be calculated for each surface according to [
23,
24,
25].
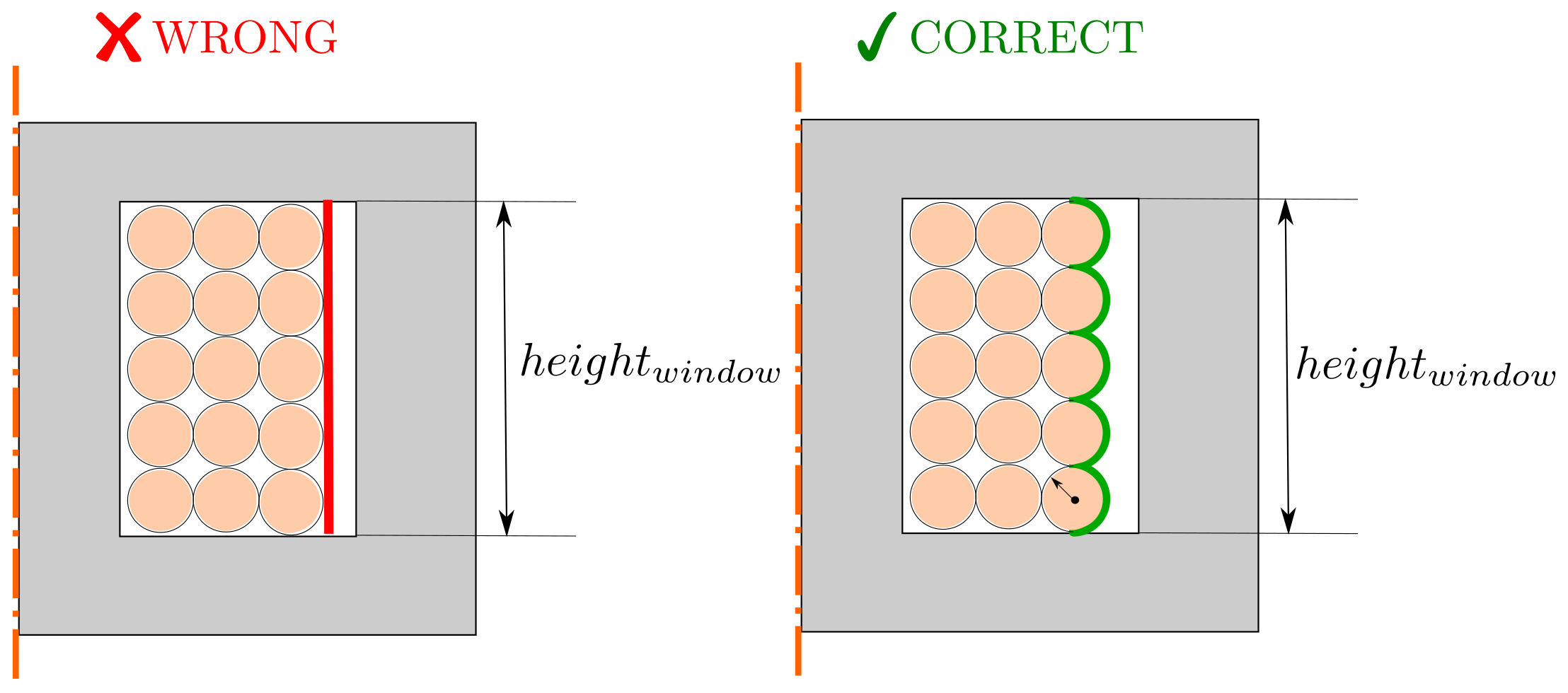
On the other hand, the windings of the magnetic components are treated as a group since only the wires in the outer layer are in direct contact with ambient. Then, the whole winding is treated as a vertical cylinder (
Table 1), but the external surface of each wire must also be considered in the total heat exchange area, as highlighted in
Figure 3. If the external surface of the winding is assumed to be equal to the window height, as expressed in Equation (
5), the results would not be accurate. Therefore, the surface of each wire must be considered, leading to the proper external surface value in squared meters, calculated in Equation (
6).
where
is the number of wires in the external layer of conductors,
r is their radius and
is the perimeter of that layer. In case the winding is made of litz bundles, homogenization techniques can be used to simplify them [
26,
27].
Since only the external layer of conductors is directly exposed to the ambient, all the windings must be treated as a block in order to calculate the required
, according to Equations (
2)–(
4). In order to simplify the calculations, it is assumed that the same
is applied to all the windings:
Finally, the power losses in the auxiliary windings are usually negligible compared to the main windings. Therefore, they can be considered as passive objects, for which is not calculated. This is also applicable for the bobbin or the pin connectors to the PCB.
2.1.4. Superposition
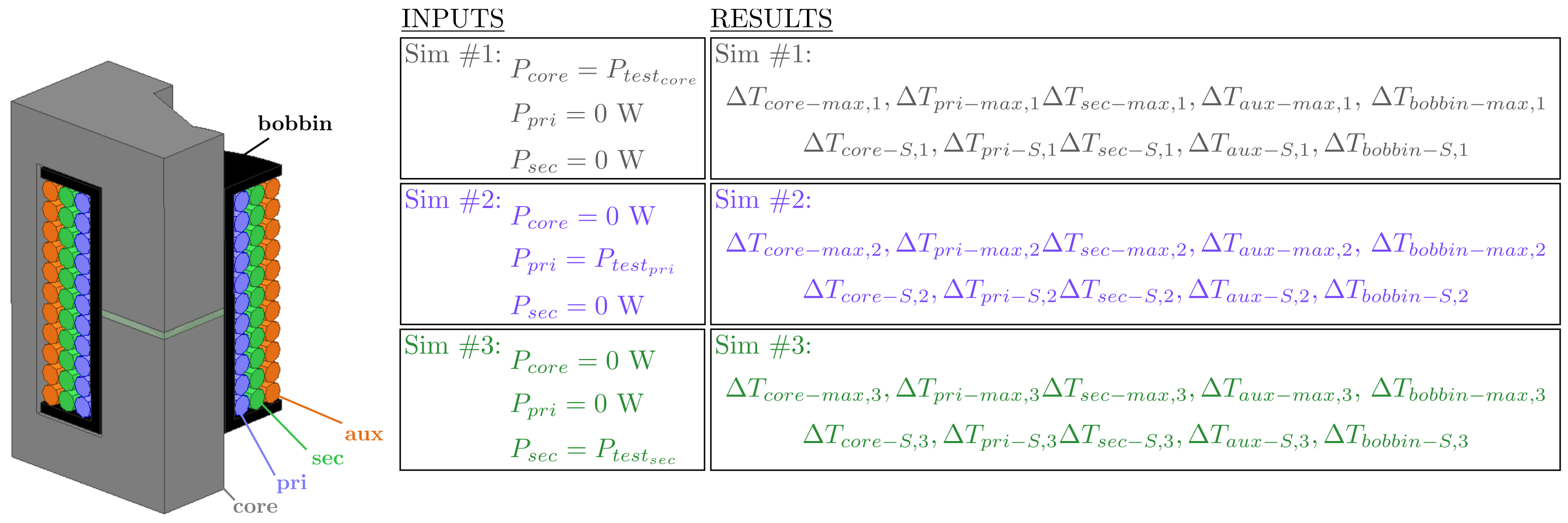
Once and are calculated for every object, the next step is to identify which simulations are required to characterize the complete system.
The generic transformer from
Figure 4 is considered as an example. It is constituted by five objects (
): the magnetic core, a plastic bobbin and three windings (primary, secondary and auxiliary). Therefore, the corresponding thermal resistance matrix (in
C/W) is defined next:
is built by applying the superposition principle because the system has been previously linearized. Each column contains the maximum temperature rise of each object, normalized by the corresponding . On the other hand, the auxiliary winding and the plastic bobbin have no power losses associated, so their corresponding columns (4th and 5th) are filled with zeros. However, these columns must be included in the matrix in order to calculate the maximum temperature of all the objects in the last step of the design process. The diagonal terms of this matrix (, being i and j the indexes for the rows and the columns, respectively) represent the self-heating behaviour of each object due to the internal heat generation, while the remaining terms () express the mutual heat flux between each object.
As a conclusion, only one simulation per active object (objects with power losses) is required to obtain the temperature of every object for the calculated
. In this example, three simulations must be performed, as shown in
Figure 4. The calculated
in the previous step are assigned to a single object in each simulation. The subsequent maximum temperature rise per object from that simulation is then stored to obtain the corresponding column of
until the matrix is complete.
2.1.5. Using the Model to Estimate the Maximum Temperature Per Object
The combination of the power losses (in Watts) applied in each object,
, is defined as a vector in Equation (
9). The maximum temperature of each part of the magnetic component (in
C) is calculated in Equation (
10) by multiplying the thermal coefficients matrix,
, by any combination of power losses applied in each object,
.
It is important to notice that once is built, the only input required to calculate the temperature at any region of the magnetic component is . This leads to a versatile model that is valid to calculate the temperature of the component for any input, which means for any electrical operating point.
A generic multi-winding transformer is used as an example in this section, but the model can also be applied to inductors. They are just a particular case with just one winding, so the process to obtain is identical.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}