
Development of Online Adaptive Traction Control for Electric Robotic Tractors


Abstract
:
1. Introduction
2. Materials and Methods
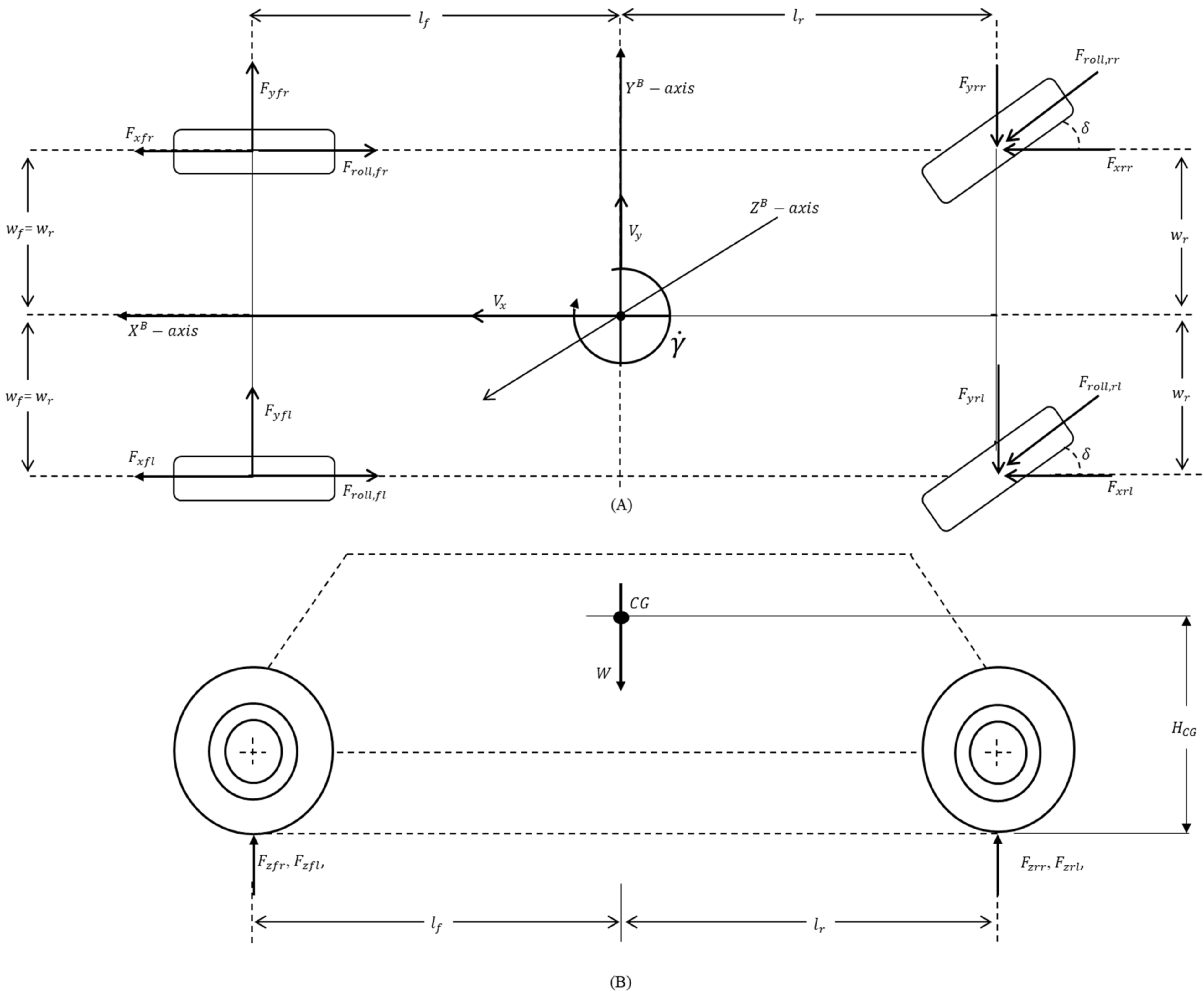
2.1. Vehicle Modelling
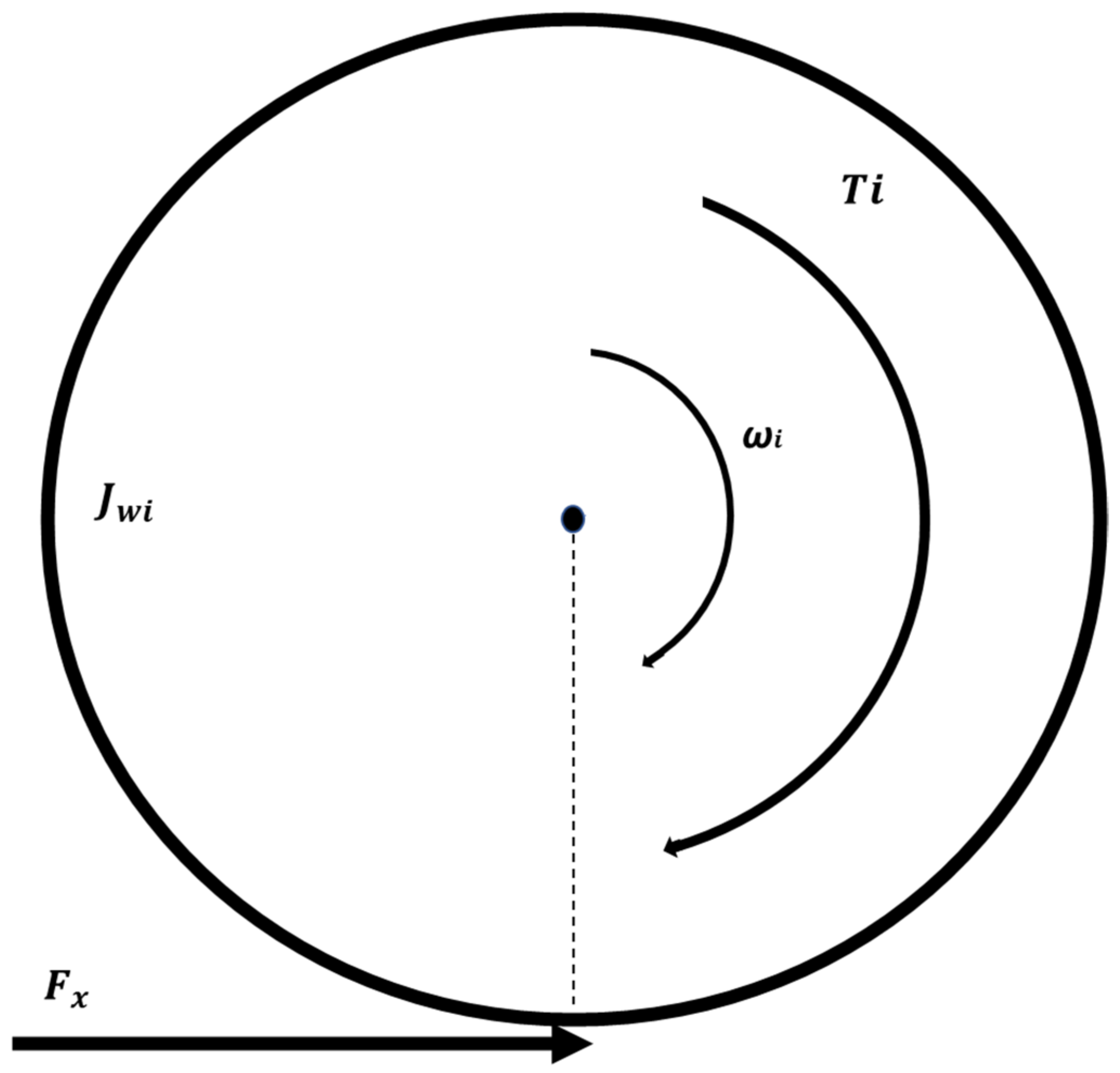
2.2. Slip Dynamic Based on a Simplified Vehicle Model
2.3. Wheel Longitudinal Force Observer
Design of the Observer
2.4. Wheel Terrain Interaction and Optimum Slip Estimation
- Step 1.
- By estimating the frictional force as in Section 2.3 and substituting the value equation (7), the instantaneous value of friction coefficient is obtained, while the instantaneous value of slip was obtained from Equation (6).
- Step 2.
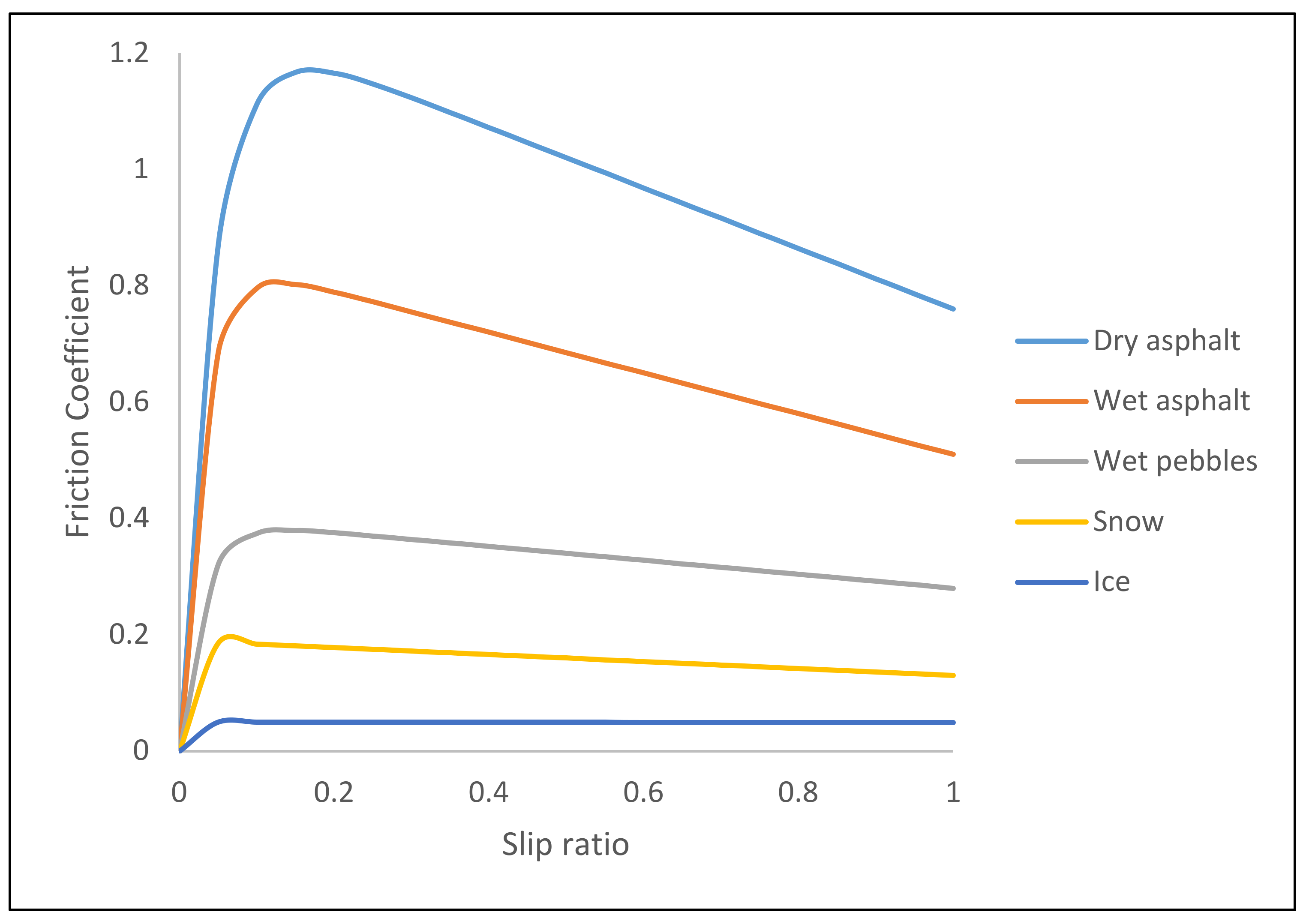
- Using the instantaneous value of slip () and the model parameters of the five different terrain types shown in Table 1, five sets of transient values for friction coefficient () are calculated by using Equation (26).
- Step 3.
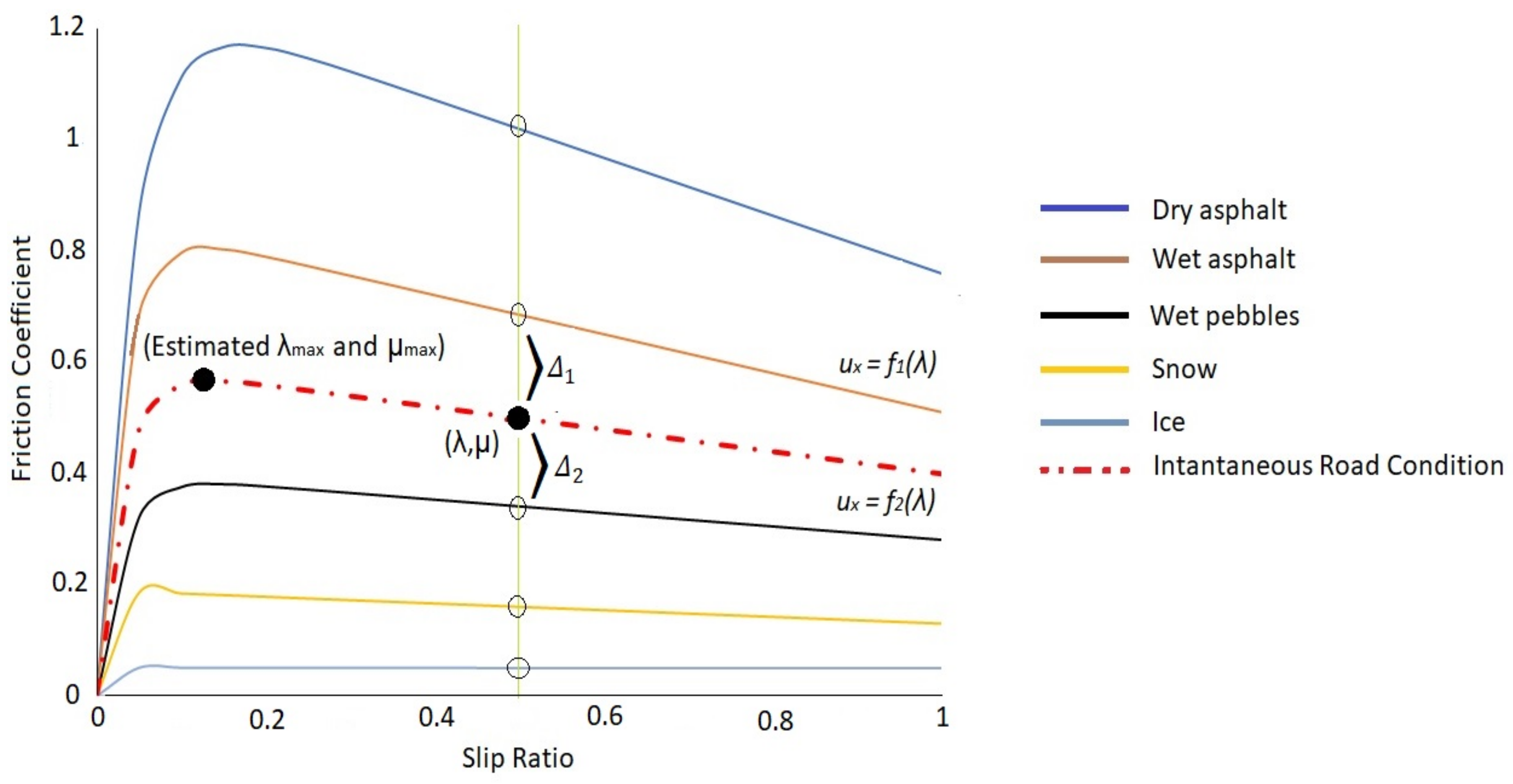
- Then, five sets of error values () are generated, by subtracting the estimate friction coefficient from the calculated ones ().
- Step 4.
- The two smallest error values ( and ) from step 3 are selected.
- Step 5.
- Using Equation (26) and the values of soil parameters () at the two points where and are obtained, two functions are generated:
- Step 6.
- Using and from step 4 and the functions and from step 5, a new function is reconstructed to estimate the maximum friction coefficient and the corresponding slip values at which it occurs (Figure 4 and Equation (29)).
- Step 7.
- By differentiating Equation (29) and setting the value to zero, the optimum slip (), at which the friction coefficient is maximum is obtained. The maximum friction coefficient can be obtained as in Equation (30)where is the maximum tire-road friction coefficient and is the corresponding slip ratio of .
3. Traction Control Design
3.1. Controller Design and Analysis
3.1.1. The Sliding Surfaces Design
3.1.2. Control Law Design
3.2. Robust Controller Design
3.3. Chattering Elimination
4. Matlab Simulations
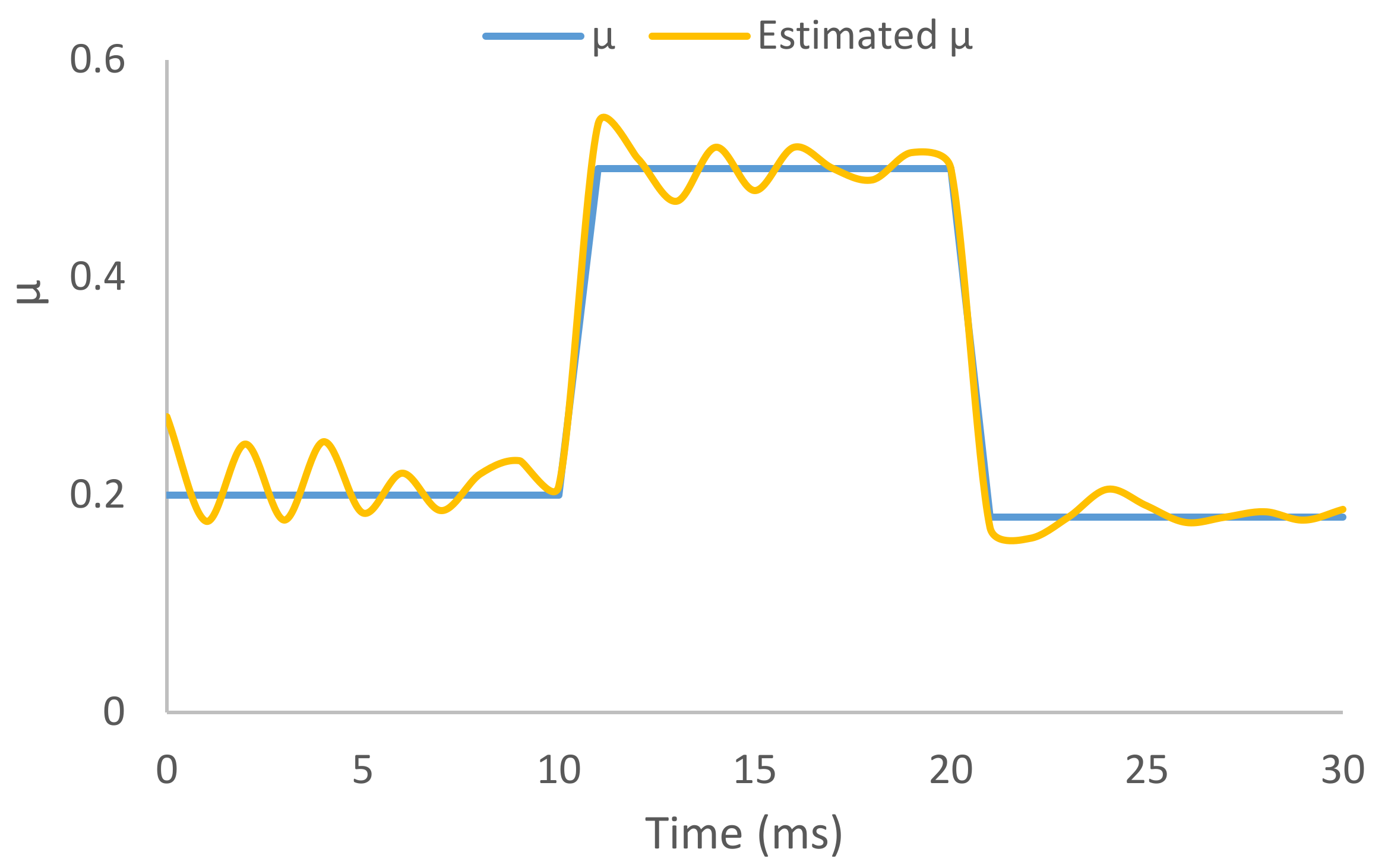
4.1. Tracking of Friction Coefficient and Robustness Performance
4.2. μ Transition Simulation
4.3. Field Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| μ | friction coefficients |
| T | wheel torque |
| r | wheel radius |
| b | wheel with |
| slip ratio | |
| RLS | least square algorithms |
| PI | proportional integral controller |
| GPS | geographical positioning system |
| vertical load acting on the wheel | |
| M | the mass of the vehicle |
| longitudinal acceleration | |
| lateral acceleration | |
| distance from the vehicle center of gravity to the axis that passed through the center of the front wheels | |
| distance from the vehicle center of gravity to the axis that passed through the center of the rear wheels | |
| front and rear wheelbase (equal length) | |
| height of the center of gravity | |
| wheel inertia including motor and reducer | |
| observer gain | |
| wheel torque | |
| DC | direct current voltage |
| ET | electric tractors |
| MTTE | maximum transmissible torque estimation |
| MFC | model following control |
| SVM | support vector machine |
| ANN | artificial neural network |
| Froll | rolling resistance force on wheels |
| longitudinal tire-road friction force | |
| lateral tire-road friction force | |
| vehicle longitudinal velocity | |
| wheel rotational velocity | |
| sliding mode control | |
| rolling resistance coefficient | |
| Subscripts | |
| fl | front left |
| fr | front right |
| rl | rear left |
| rr | rear right |
References
- Ehsani, M.; Gao, Y.; Longo, S.; Ebrahimi, K. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Hori, Y.; Toyoda, Y.; Tsuruoka, Y. Traction control of electric vehicle: Basic experimental results using the test EV “UOT Electric March”. IEEE Trans. Ind. Appl. 1998, 34, 1131–1138. [Google Scholar] [CrossRef]
- Zhou, X.; Zhou, J.; Wang, Z.; Yang, L.; Yu, M. The control of high-clearance electric vehicles based on pavement parameter estimations. Adv. Mech. Eng. 2018, 10, 1687814018786377. [Google Scholar] [CrossRef]
- Jia, C.; Qiao, W.; Qu, L. Numerical Methods for Optimal Control of Hybrid Electric Agricultural Tractors. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Novi, MI, USA, 19–21 June 2019; pp. 1–6. [Google Scholar]
- Ding, Z.; Li, B. Design and Analysis of the Suspension for Electric Tractor. IOP Conf. Ser. Mater. Sci. Eng. 2019, 493, 012077. [Google Scholar] [CrossRef]
- Melo, R.R.; Antunes, F.L.; Daher, S.; Vogt, H.H.; Albiero, D.; Tofoli, F.L. Conception of an electric propulsion system for a 9 kW electric tractor suitable for family farming. IET Electr. Power Appl. 2019, 13, 1993–2004. [Google Scholar] [CrossRef]
- Li, T.; Xie, B.; Wang, R. Design and experiments of electronic steer-by-wire system in electric tractor. IOP Conf. Ser. Earth Environ. Sci. 2019, 252, 032108. [Google Scholar] [CrossRef] [Green Version]
- Sunusi, I.I.; Zhou, J.; Wang, Z.Z.; Sun, C.; Ibrahim, I.E.; Opiyo, S.; Korohou, T.; Soomro, S.A.; Alhaji Sale, N.; Olanrewaju, T.O. Intelligent tractors: Review of online traction control process. Comput. Electron. Agric. 2020, 170, 105176. [Google Scholar] [CrossRef]
- Cairns, E.J.; Albertus, P. Batteries for Electric and Hybrid-Electric Vehicles. Annu. Rev. Chem. Biomol. Eng. 2010, 1, 299–320. [Google Scholar] [CrossRef]
- Burke, A.F. Batteries and Ultracapacitors for Electric, Hybrid, and Fuel Cell Vehicles. Proc. IEEE 2007, 95, 806–820. [Google Scholar] [CrossRef]
- Gerssen-Gondelach, S.J.; Faaij, A.P.C. Performance of batteries for electric vehicles on short and longer term. J. Power Sour. 2012, 212, 111–129. [Google Scholar] [CrossRef]
- Gandoman, F.H.; Jaguemont, J.; Goutam, S.; Gopalakrishnan, R.; Firouz, Y.; Kalogiannis, T.; Omar, N.; Van Mierlo, J. Concept of reliability and safety assessment of lithium-ion batteries in electric vehicles: Basics, progress, and challenges. Appl. Energy 2019, 251, 113343. [Google Scholar] [CrossRef]
- Nykvist, B.; Sprei, F.; Nilsson, M. Assessing the progress toward lower priced long range battery electric vehicles. Energy Policy 2019, 124, 144–155. [Google Scholar] [CrossRef]
- Kuntanapreeda, S. Traction control of electric vehicles using sliding-mode controller with tractive force observer. Int. J. Veh. Technol. 2014, 2014, 829097. [Google Scholar] [CrossRef] [Green Version]
- Nam, K.; Hori, Y.; Lee, C.J.E. Wheel slip control for improving traction-ability and energy efficiency of a personal electric vehicle. Energies 2015, 8, 6820–6840. [Google Scholar] [CrossRef] [Green Version]
- Khatun, P.; Bingham, C.M.; Schofield, N.; Mellor, P.H. Application of fuzzy control algorithms for electric vehicle antilock braking/traction control systems. IEEE Trans. Ind. Appl. 2003, 52, 1356–1364. [Google Scholar] [CrossRef]
- Fuse, H.; Fujimoto, H. Driving Force Controller with Variable Slip Ratio Limiter for Electric Vehicle Considering Lateral Slip Based on Brush Model. In Proceedings of the 2019 IEEE Vehicle Power and Propulsion Conference (VPPC), Hanoi, Vietnam, 14–17 October 2019; pp. 1–6. [Google Scholar]
- Gonzalez, R.; Apostolopoulos, D.; Iagnemma, K. Improving rover mobility through traction control: Simulating rovers on the Moon. Auton. Robot. 2019, 43, 1977–1988. [Google Scholar] [CrossRef]
- König, L.; Schindele, F.; Zimmermann, A. ITC–Integrated traction control for sports car applications. In 19. Internationales Stuttgarter Symposium; Springer: Berlin/Heidelberg, Germany, 2019; pp. 457–470. [Google Scholar]
- Dogan, D.; Boyraz, P. Smart Traction Control Systems for Electric Vehicles Using Acoustic Road-Type Estimation. IEEE Trans. Intell. Veh. 2019, 4, 486–496. [Google Scholar] [CrossRef]
- Ma, Y.; Zhao, J.; Zhao, H.; Lu, C.; Chen, H. MPC-Based Slip Ratio Control for Electric Vehicle Considering Road Roughness. IEEE Access 2019, 7, 52405–52413. [Google Scholar] [CrossRef]
- Yin, D.; Sun, N.; Hu, J. A Wheel Slip Control Approach Integrated with Electronic Stability Control for Decentralized Drive Electric Vehicles. IEEE Trans. Ind. Inform. 2019, 15, 2244–2252. [Google Scholar] [CrossRef]
- Liu, H.H.S.; Pang, G.K.H. Accelerometer for mobile robot positioning. IEEE Trans. Ind. Appl. 2001, 37, 812–819. [Google Scholar] [CrossRef]
- Pang, G.; Liu, H. Evaluation of a Low-cost MEMS Accelerometer for Distance Measurement. J. Intell. Robot. Syst. 2001, 30, 249–265. [Google Scholar] [CrossRef]
- Antonello, R.; Ito, K.; Oboe, R. Acceleration Measurement Drift Rejection in Motion Control Systems by Augmented-State Kinematic Kalman Filter. IEEE Trans. Ind. Electron. 2016, 63, 1953–1961. [Google Scholar] [CrossRef]
- Rock, K.L.; Beiker, S.A.; Laws, S.; Gerdes, J.C. Validating GPS Based Measurements for Vehicle Control. In Proceedings of the ASME 2005 International Mechanical Engineering Congress and Exposition, Orlando, FL, USA, 5–11 November 2005; pp. 583–592. [Google Scholar]
- Bae, H.S.; Ryu, J.; Gerdes, J.C. Road grade and vehicle parameter estimation for longitudinal control using GPS. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Oakland, CA, USA, 25–29 August 2001; pp. 25–29. [Google Scholar]
- Itou, K.; Fujita, T.; Shirato, R.; Akiba, T. A Study of Novel Traction Control Method for Electric Motor Driven Vehicle; The Automotive Research Association of India: Pune, India, 2009. [Google Scholar]
- Okano, T.; Tai Chien, H.; Inoue, T.; Uchida, T.; Shin-Ichiro, S.; Hori, Y. Vehicle stability improvement based on MFC independently installed on 4 Wheels-basic experiments using “UOT Electric March II”. In Proceedings of the Power Conversion Conference-Osaka 2002 (Cat. No.02TH8579), Osaka, Japan, 2–5 April 2002; Volume 2, pp. 582–587. [Google Scholar]
- Ewin, N.J.; Howey, D.A.; McCulloch, M.D. MTTE-Based traction control for directional stability on mixed-μ roads. In IET Conference Proceedings; Institution of Engineering and Technology: London, UK, 2013; pp. 74–79. [Google Scholar]
- Hu, J.-S.; Yin, D.; Hori, Y. Electric Vehicle Traction Contro-A New MTTE Approach with PI Observer. IFAC Proc. 2009, 42, 137–142. [Google Scholar] [CrossRef]
- Song, Z.; Li, J.; Xu, L.; Ouyang, M. Traction Control System for EV Based on Modified Maximum Transmissible Torque Estimation. In Proceedings of the 2013 IEEE Vehicle Power and Propulsion Conference (VPPC), Beijing, China, 15–18 October 2013; pp. 1–7. [Google Scholar]
- Khatun, P.; Bingham, C.; Mellor, P. Comparison of Control Methods for Electric Vehicle Antilock Braking/Traction Control Systems; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2001; ISSN 0148–7191. [Google Scholar] [CrossRef]
- Kataoka, H.; Sado, H.; Sakai, I.; Hori, Y. Optimal slip ratio estimator for traction control system of electric vehicle based on fuzzy inference. Electr. Eng. Jpn. 2001, 135, 56–63. [Google Scholar] [CrossRef]
- Masino, J.; Pinay, J.; Reischl, M.; Gauterin, F.J.A.A. Road surface prediction from acoustical measurements in the tire cavity using support vector machine. Appl. Acoust. 2017, 125, 41–48. [Google Scholar] [CrossRef]
- Acosta, M.; Kanarachos, S.; Blundell, M.J.A.S. Road friction virtual sensing: A review of estimation techniques with emphasis on low excitation approaches. Appl. Acoust. 2017, 7, 1230. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Li, H.; Zhang, X.; He, L.; Song, J. Real-time tire parameters observer for vehicle dynamics stability control. Chin. J. Mech. Eng. 2010, 23, 620–626. [Google Scholar] [CrossRef]
- Geist, M.; Pietquin, O. Statistically linearized recursive least squares. In Proceedings of the 2010 IEEE International Workshop on Machine Learning for Signal Processing, Kittilä, Finland, 29 August–1 September 2010; pp. 272–276. [Google Scholar]
- Rhode, S.; Gauterin, F. Online estimation of vehicle driving resistance parameters with recursive least squares and recursive total least squares. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast, Australia, 23–26 June 2013; pp. 269–276. [Google Scholar]
- Akbari, A.; Lohmann, B. Multi-Objective H∞/GH2 Preview Control of Active Vehicle Suspensions. Ph.D. Thesis, Technische Universität München, München, Germany, 2009. [Google Scholar]
- Farroni, F.; Russo, M.; Russo, R.; Terzo, M.; Timpone, F. A combined use of phase plane and handling diagram method to study the influence of tyre and vehicle characteristics on stability. Int. J. Veh. Mech. Mobil. 2013, 51, 1265–1285. [Google Scholar] [CrossRef]
- Bucolo, M.; Buscarino, A.; Famoso, C.; Fortuna, L.; Frasca, M. Control of imperfect dynamical systems. Nonlinear Dyn. 2019, 98, 2989–2999. [Google Scholar] [CrossRef]
- Andersen, M.H.; Jensen, H.-C.B. Design of Slip-based Active Braking and Traction Control System for the Electric Vehicle QBEAK. Master’s Thesis, Aalborg University, Aalborg Øst, Danmark, 2012. [Google Scholar]
- Matuško, J.; Petrović, I.; Perić, N. Neural network based tire/road friction force estimation. Eng. Appl. Artif. Intell. 2008, 21, 442–456. [Google Scholar] [CrossRef]
- Wang, R.; Wang, J. Tire–road friction coefficient and tire cornering stiffness estimation based on longitudinal tire force difference generation. Control. Eng. Pract. 2013, 21, 65–75. [Google Scholar] [CrossRef]
- Ray, L.R. Nonlinear Tire Force Estimation and Road Friction Identification: Simulation and Experiments. Automatica 1997, 33, 1819–1833. [Google Scholar] [CrossRef]
- Feng, Y.; Chen, H.; Zhao, H.; Zhou, H. Road tire friction coefficient estimation for four wheel drive electric vehicle based on moving optimal estimation strategy. Mech. Syst. Signal Process. 2019, 139, 106416. [Google Scholar] [CrossRef]
- Patra, N.; Datta, K. Observer Based Road-Tire Friction Estimation for Slip Control of Braking System. Procedia Eng. 2012, 38, 1566–1574. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.H.; Li, T.; Yang, Y.Y.; Ji, X.W.; Wu, J. Estimation of tire-road friction coefficient based on combined APF-IEKF and iteration algorithm. Mech. Syst. Signal Process. 2017, 88, 25–35. [Google Scholar] [CrossRef]
- Jin, X.; Yin, G.; Chen, N. Advanced Estimation Techniques for Vehicle System Dynamic State: A Survey. Sensors 2019, 19, 4289. [Google Scholar] [CrossRef] [Green Version]
- Ferrara, A. Sliding Mode Control of Vehicle Dynamics; Institution of Engineering and Technology: London, UK, 2017. [Google Scholar]
- Slotine, J.-J.E.; Li, W. Applied Nonlinear Control; Prentice Hall Englewood Cliffs, NJ: Fort Wayne, IN, USA, 1991; Volume 199. [Google Scholar]
- Gómez Fernández, J. A Vehicle Dynamics Model for Driving Simulators. Master’s Thesis, Chalmers University of Technology, Göteborg, Sweden, 2012. [Google Scholar]
- Utkin, V.; Guldner, J.; Shijun, M. Sliding Mode Control in Electro-Mechanical Systems; CRC Press: Boca Raton, FL, USA, 1999; Volume 34. [Google Scholar]
- Pacejka, H. Tire and Vehicle Dynamics; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Svendenius, J. Tire Modeling and Friction Estimation. Ph.D. Thesis, Department of Automatic Control, Lund University, Lund, Sweden, 2007. [Google Scholar]
- Li, Q.; Liu, L.; Yuan, X. Model Predictive Controller-Based Optimal Slip Ratio Control System for Distributed Driver Electric Vehicle. J. Math. Probl. Eng. 2020, 2020, 8086590. [Google Scholar] [CrossRef]
- Bian, M.; Chen, L.; Luo, Y.; Li, K. Research on maximum road adhesion coefficient estimation for distributed drive electric vehicle. In Proceedings of the 2013 International Conference on Mechanical and Automation Engineering, Jiujang, China, 21–23 July 2013; pp. 90–94. [Google Scholar]
- Cui, G.; Dou, J.; Li, S.; Zhao, X.; Lu, X.; Yu, Z. Slip control of electric vehicle based on tire-road friction coefficient estimation. Math. Probl. Eng. 2017, 2017, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Phillips, C.L.; Harbor, R.D. Feedback Control Systems; Prentice Hall: Upper Saddle River, NJ, USA, 2000; Volume 581. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Road Surface | |||
|---|---|---|---|
| Dry asphalt | 1.28 | 23.99 | 0.52 |
| Wet asphalt | 0.86 | 33.82 | 0.35 |
| Wet pebbles | 0.40 | 33.71 | 0.12 |
| Snow | 0.19 | 94.13 | 0.06 |
| Ice | 0.05 | 306.4 | 0.001 |
| Parameters | Value |
|---|---|
| Vehicle weight (kg) | 1200 |
| Width (m) | 2.3 |
| Height (m) | 2.5 |
| Wheelbase (m) | 2.2 |
| Ground clearance (m) | 2.2 |
| Rated power (kW) | 4.5 |
| Rated torque (Nm) | 21.5 |
| Maximum torque (Nm) | 54.9 |
| Rated speed (rpm) | 2000 |
| Maximum speed (rpm) | 3000 |
| Motor speed reduction ratio | 32:1 |
| Total wheel inertia (Kgms2) | 1.95 |
| Wheel radius (M) | 0.326 |
| Center of Gravity (CG) | 1.1 |
| Parameter/Value | Minimum Value | Estimate | Maximum Value | Maximum Deviation |
|---|---|---|---|---|
| Mass on the wheels (kg) | 200 | 375 | 600 | 225 |
| Rolling resistance coefficient () | 0.1 | 0.15 | 0.2 | 0.05 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sunusi, I.I.; Zhou, J.; Sun, C.; Wang, Z.; Zhao, J.; Wu, Y. Development of Online Adaptive Traction Control for Electric Robotic Tractors. Energies 2021, 14, 3394. https://doi.org/10.3390/en14123394
Sunusi II, Zhou J, Sun C, Wang Z, Zhao J, Wu Y. Development of Online Adaptive Traction Control for Electric Robotic Tractors. Energies. 2021; 14(12):3394. https://doi.org/10.3390/en14123394
Chicago/Turabian StyleSunusi, Idris Idris, Jun Zhou, Chenyang Sun, Zhenzhen Wang, Jianlei Zhao, and Yongshuan Wu. 2021. "Development of Online Adaptive Traction Control for Electric Robotic Tractors" Energies 14, no. 12: 3394. https://doi.org/10.3390/en14123394
APA StyleSunusi, I. I., Zhou, J., Sun, C., Wang, Z., Zhao, J., & Wu, Y. (2021). Development of Online Adaptive Traction Control for Electric Robotic Tractors. Energies, 14(12), 3394. https://doi.org/10.3390/en14123394