
Aerodynamic Characterization of Hypersonic Transportation Systems and Its Impact on Mission Analysis




Abstract
:1. Introduction
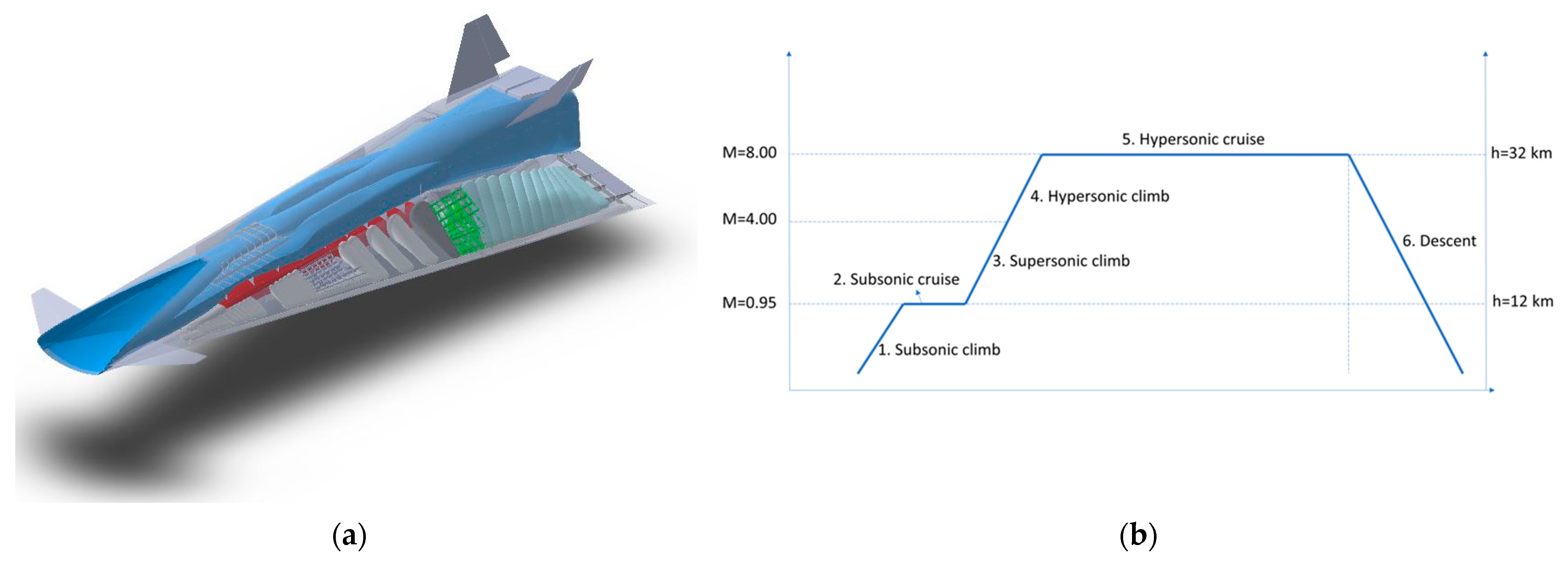
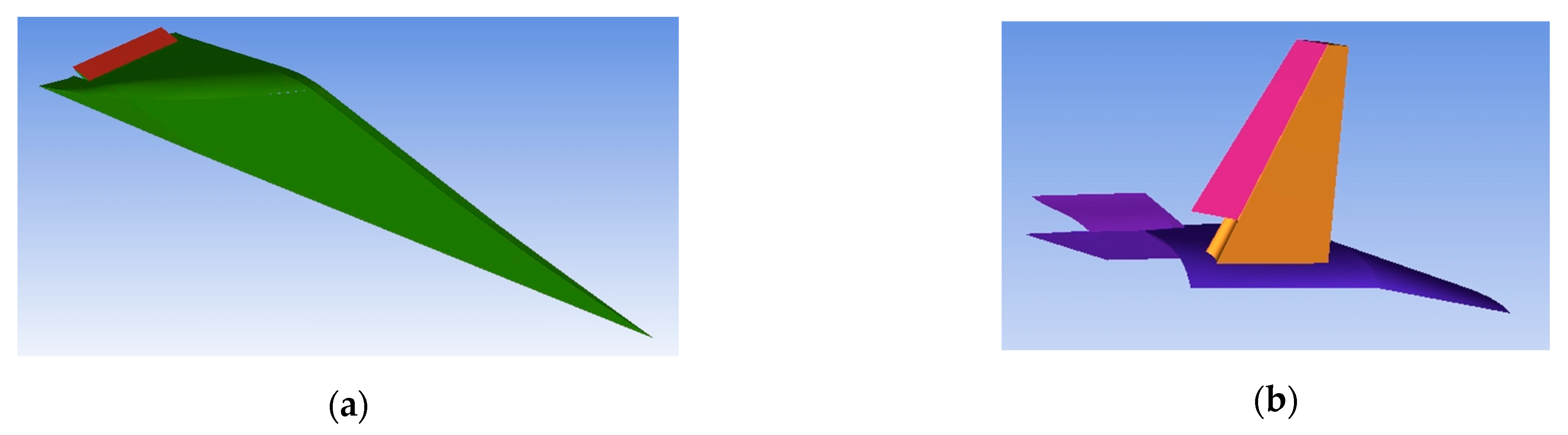
2. STRATOFLY MR3: Vehicle and Mission Overview
3. Aerodynamic Characterization
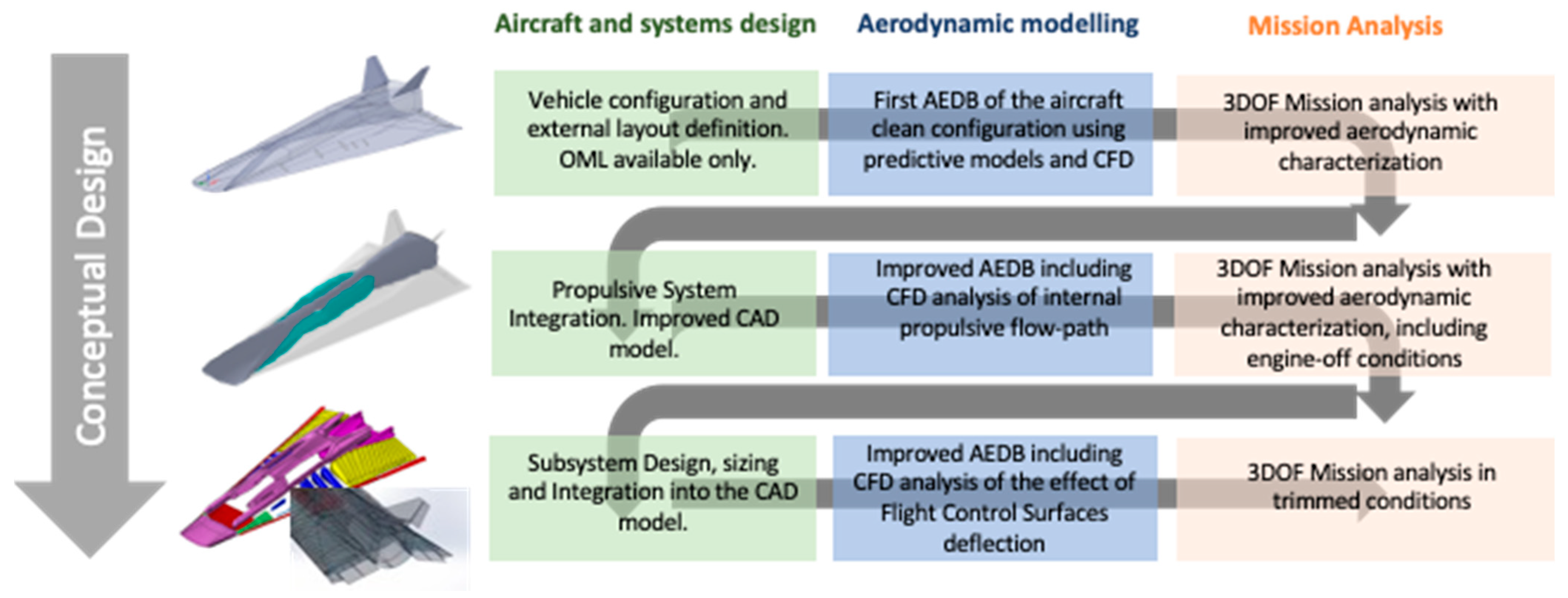
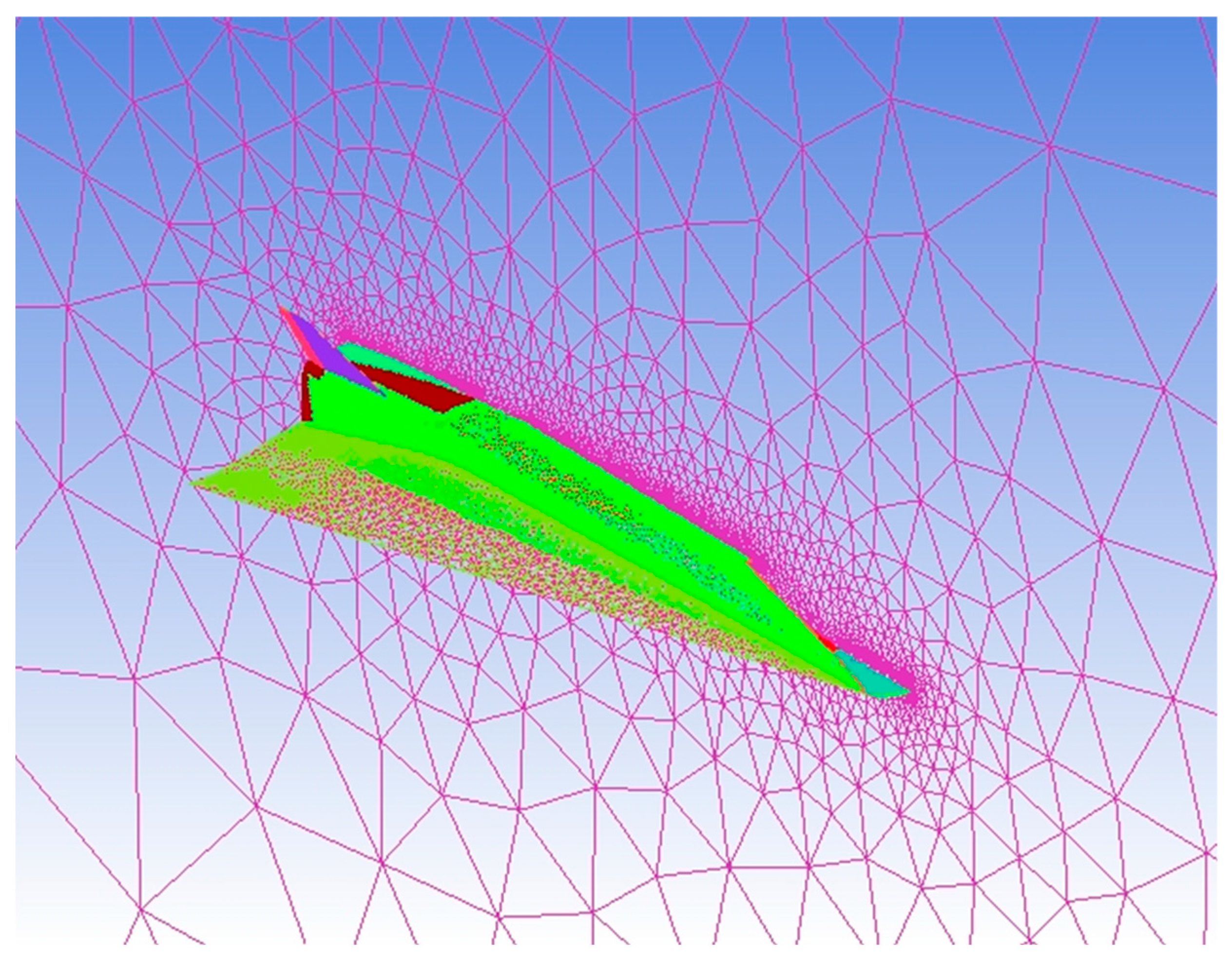
3.1. Methodology Overview
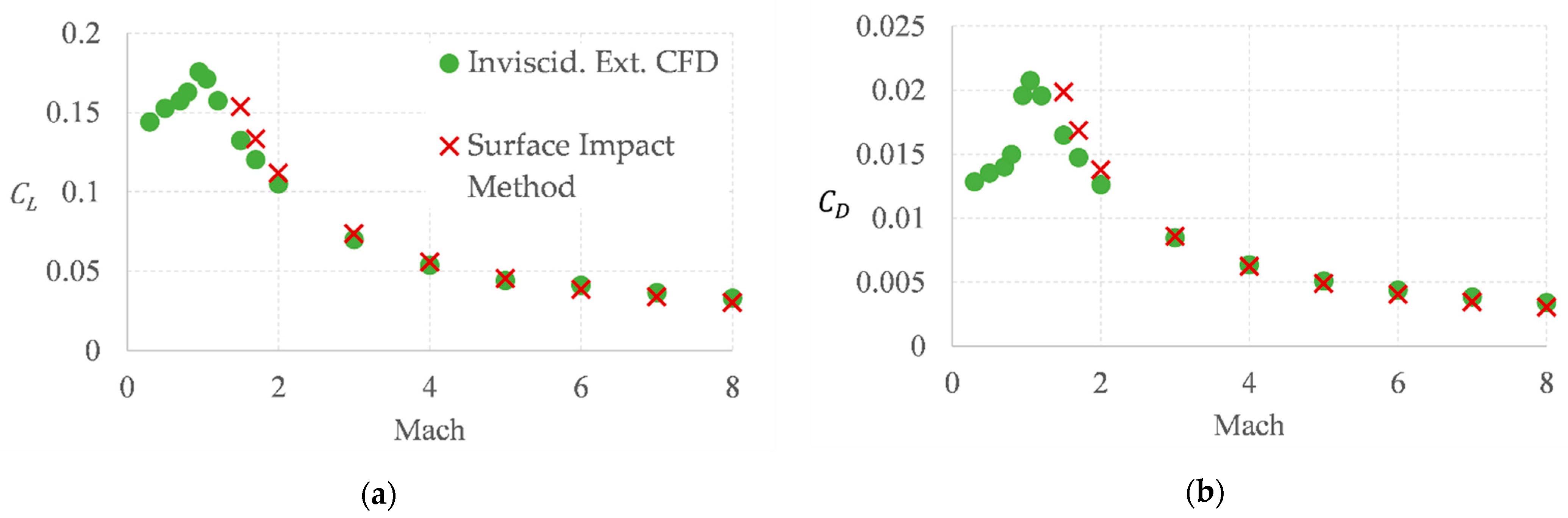
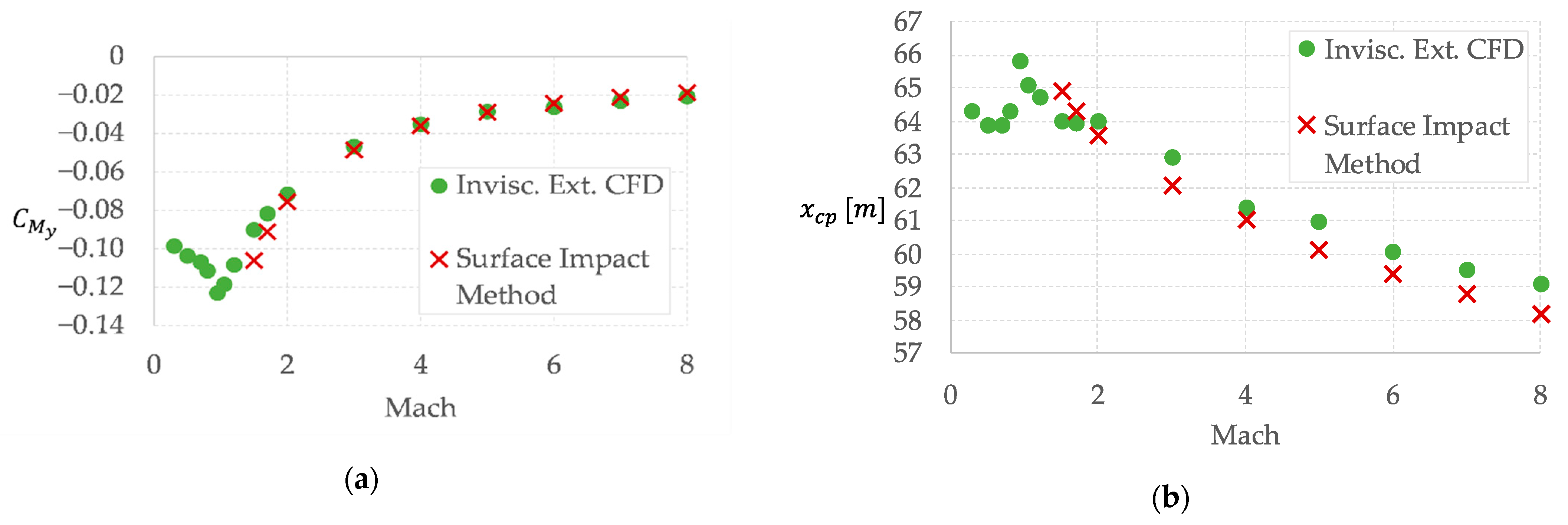
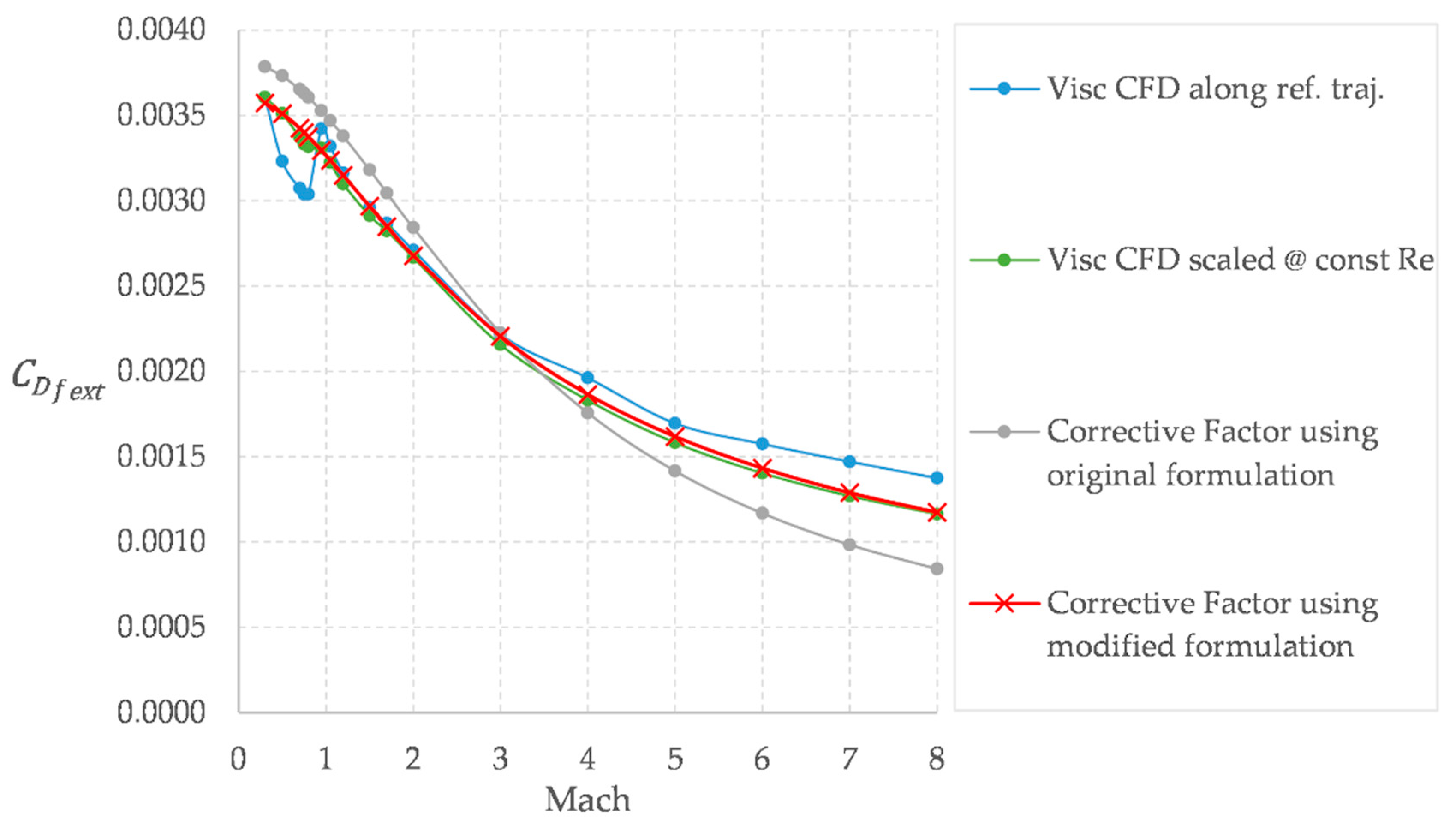
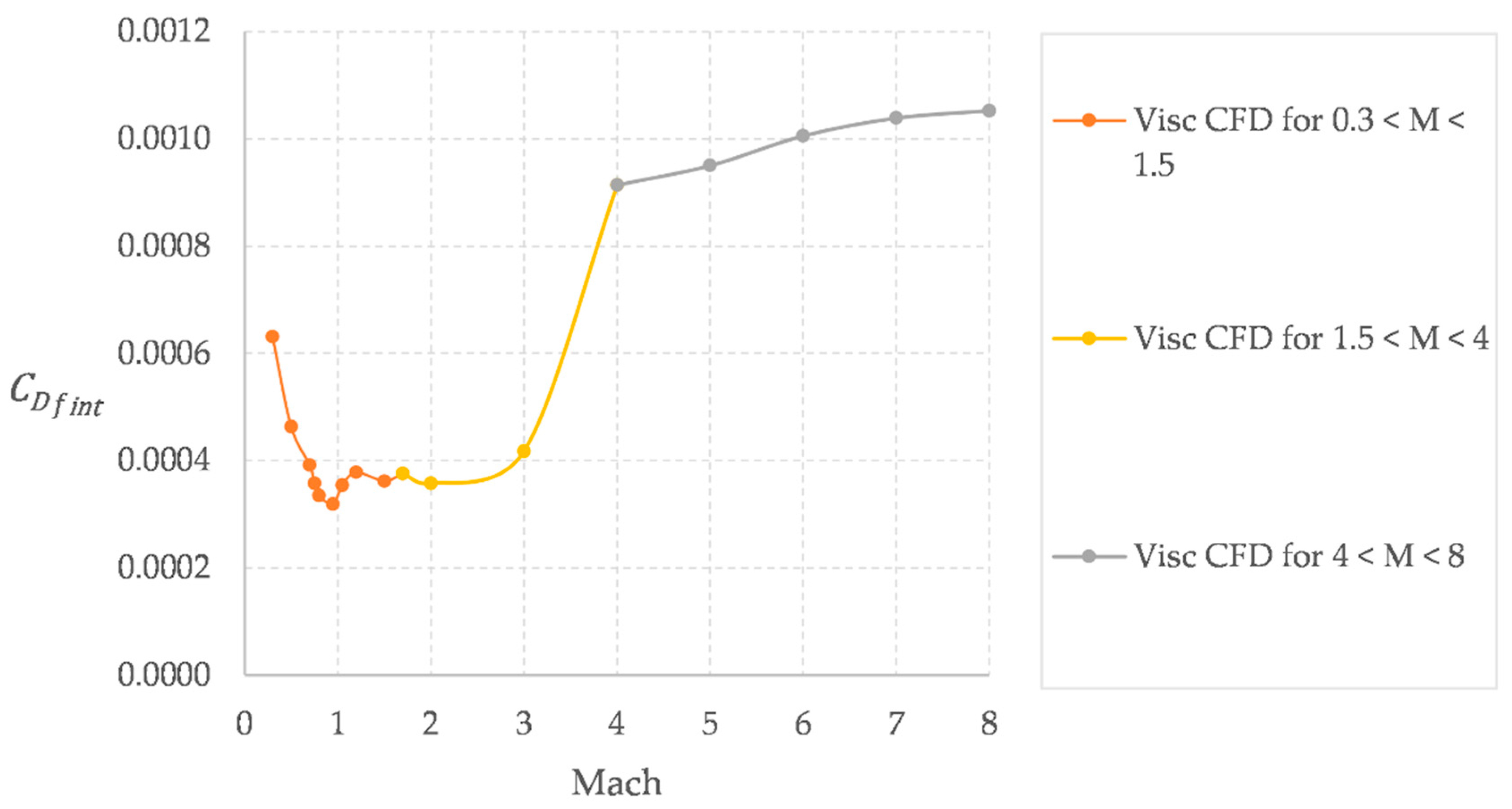
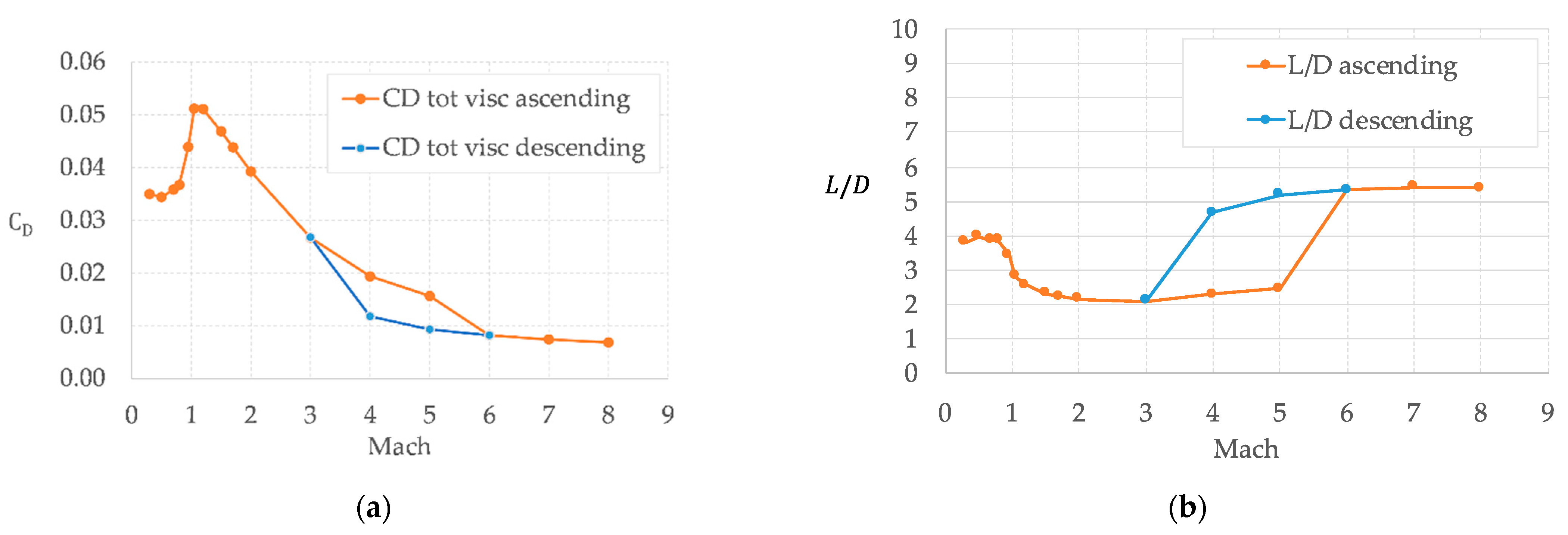
3.2. Clean Configuration: Inviscid CFD and Innovative Viscous Corrections
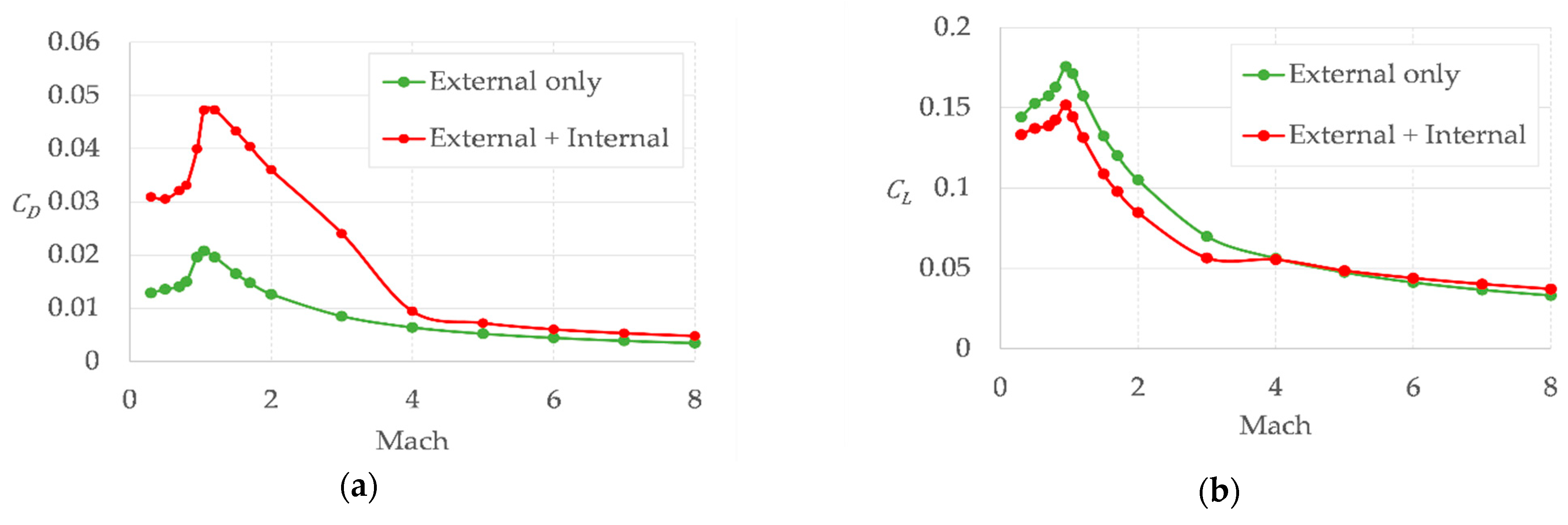
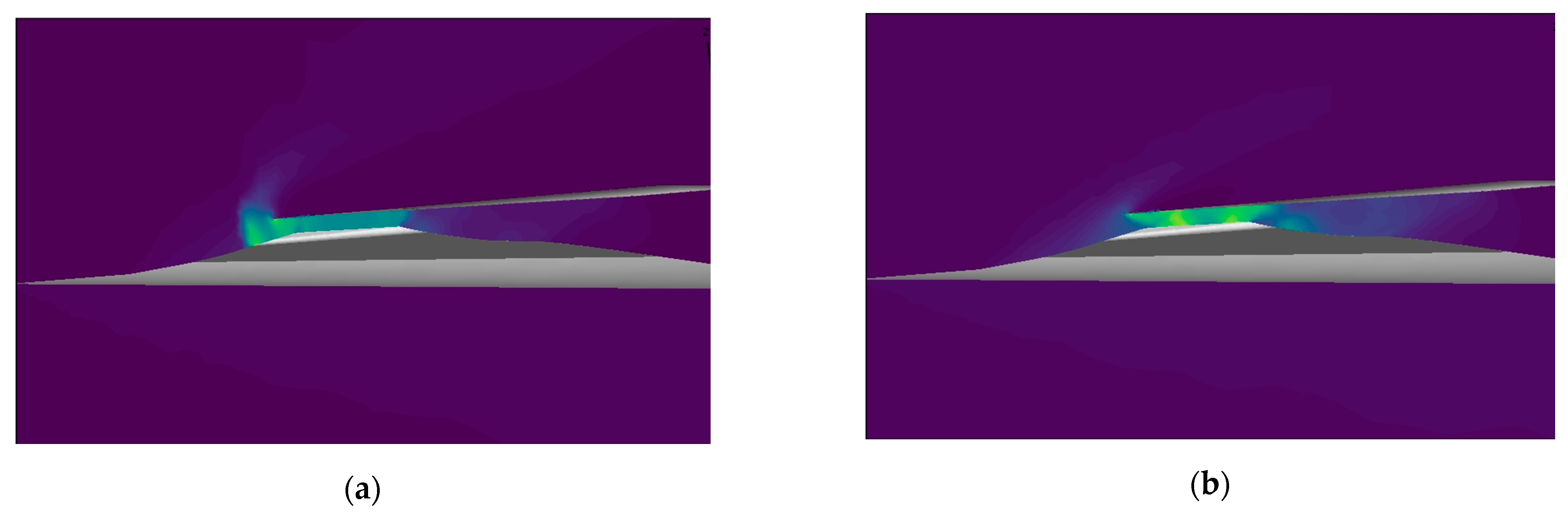
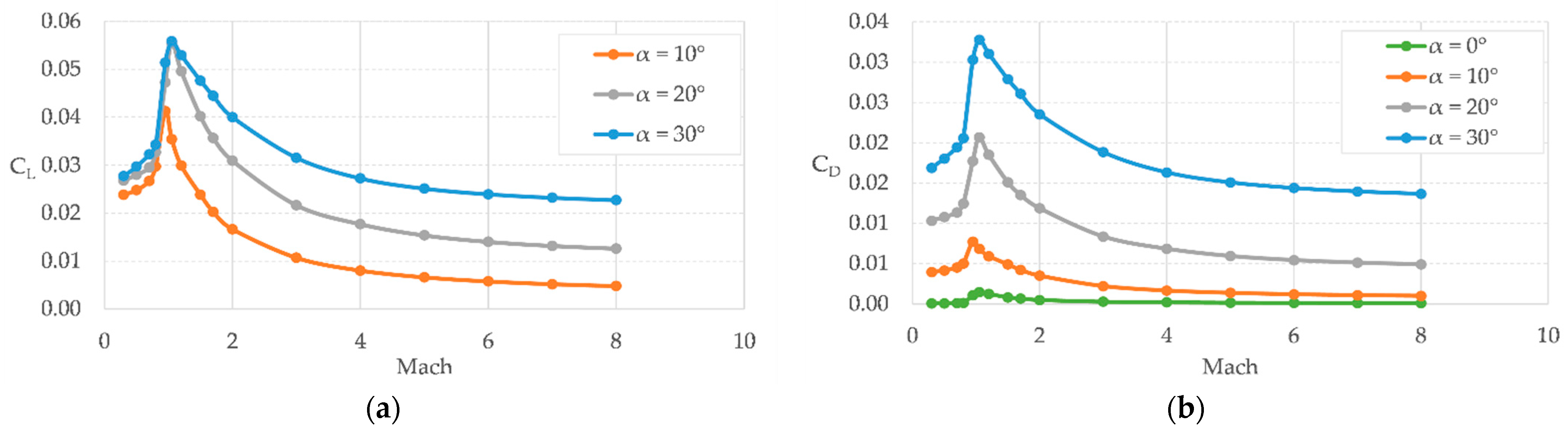
3.3. Impact of Propulsive Flow Path
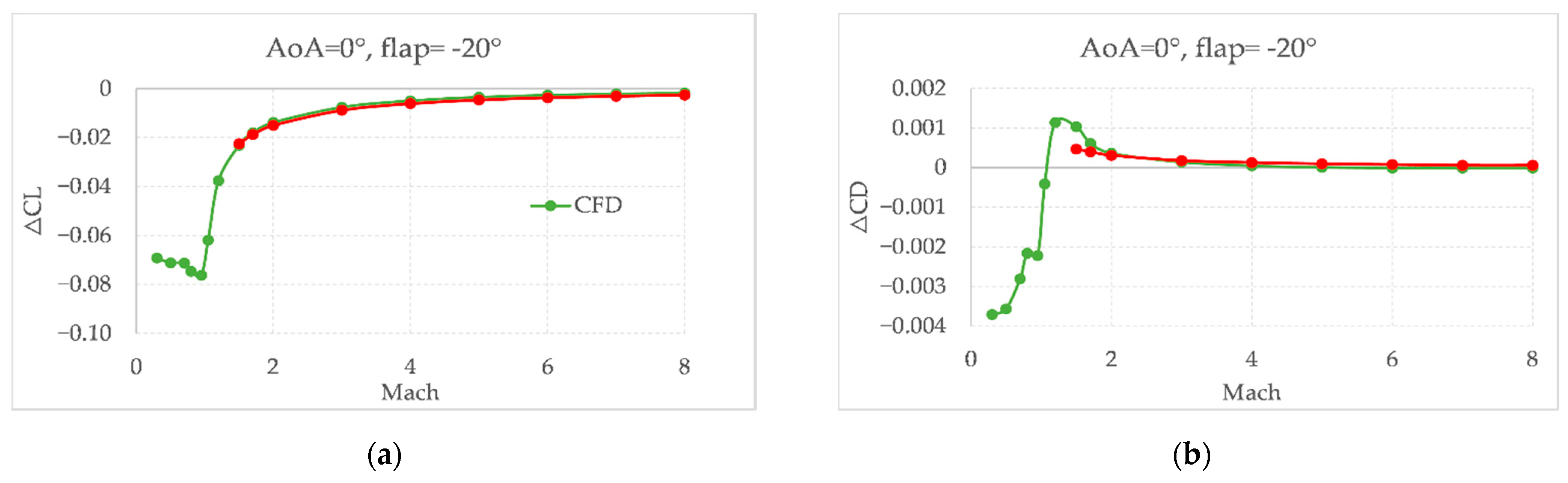
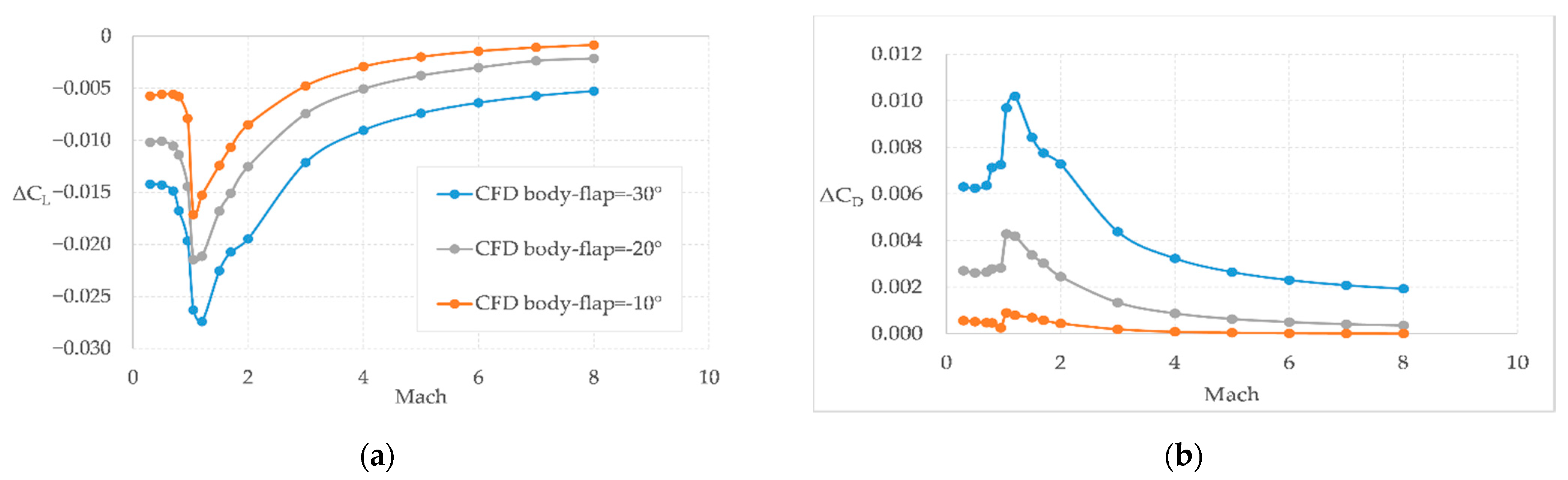
3.4. Impact of Control Surfaces
4. Mission Analysis
4.1. Methodology Overview
4.2. Mission Analysis with Clean Configuration
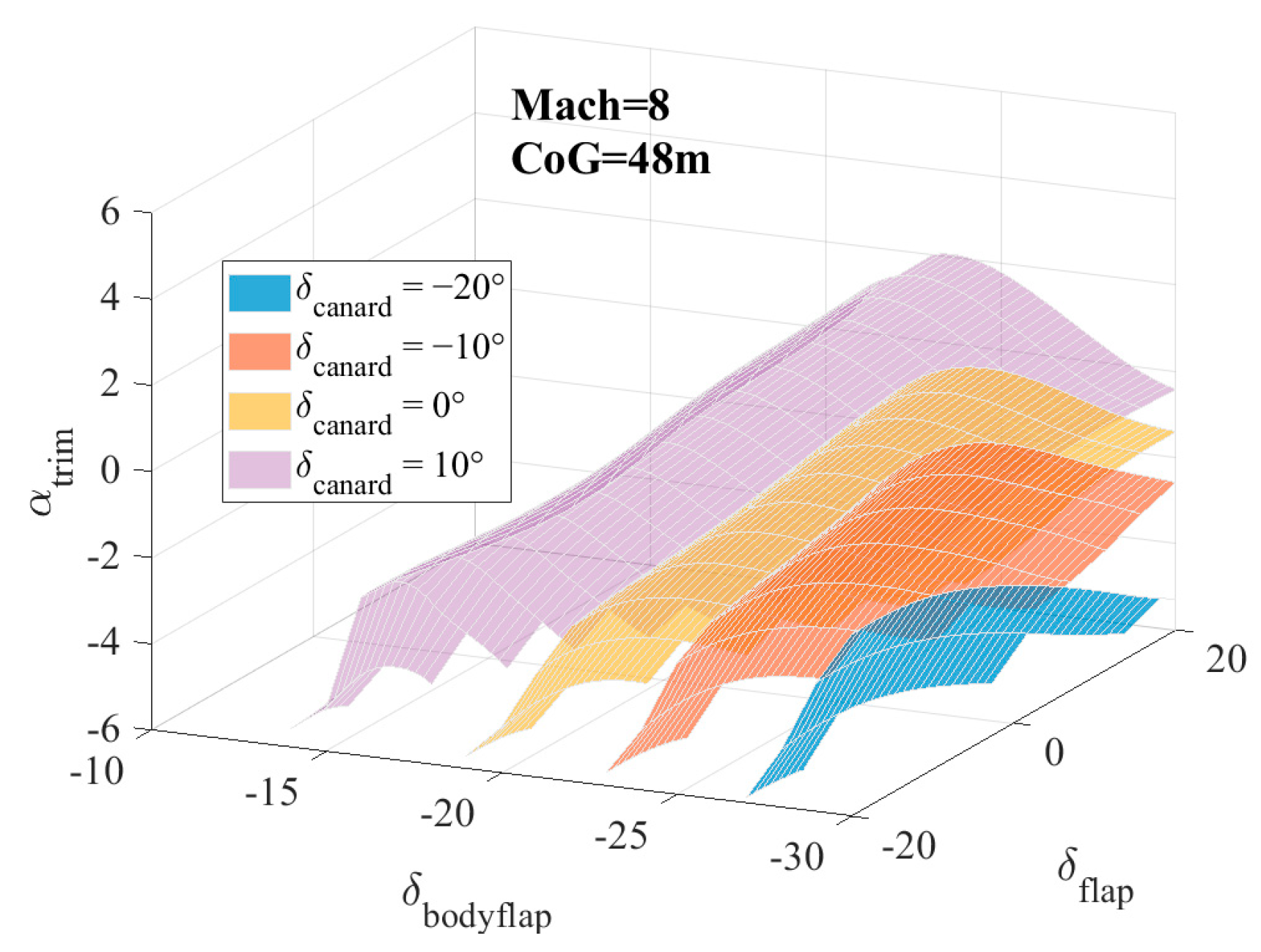
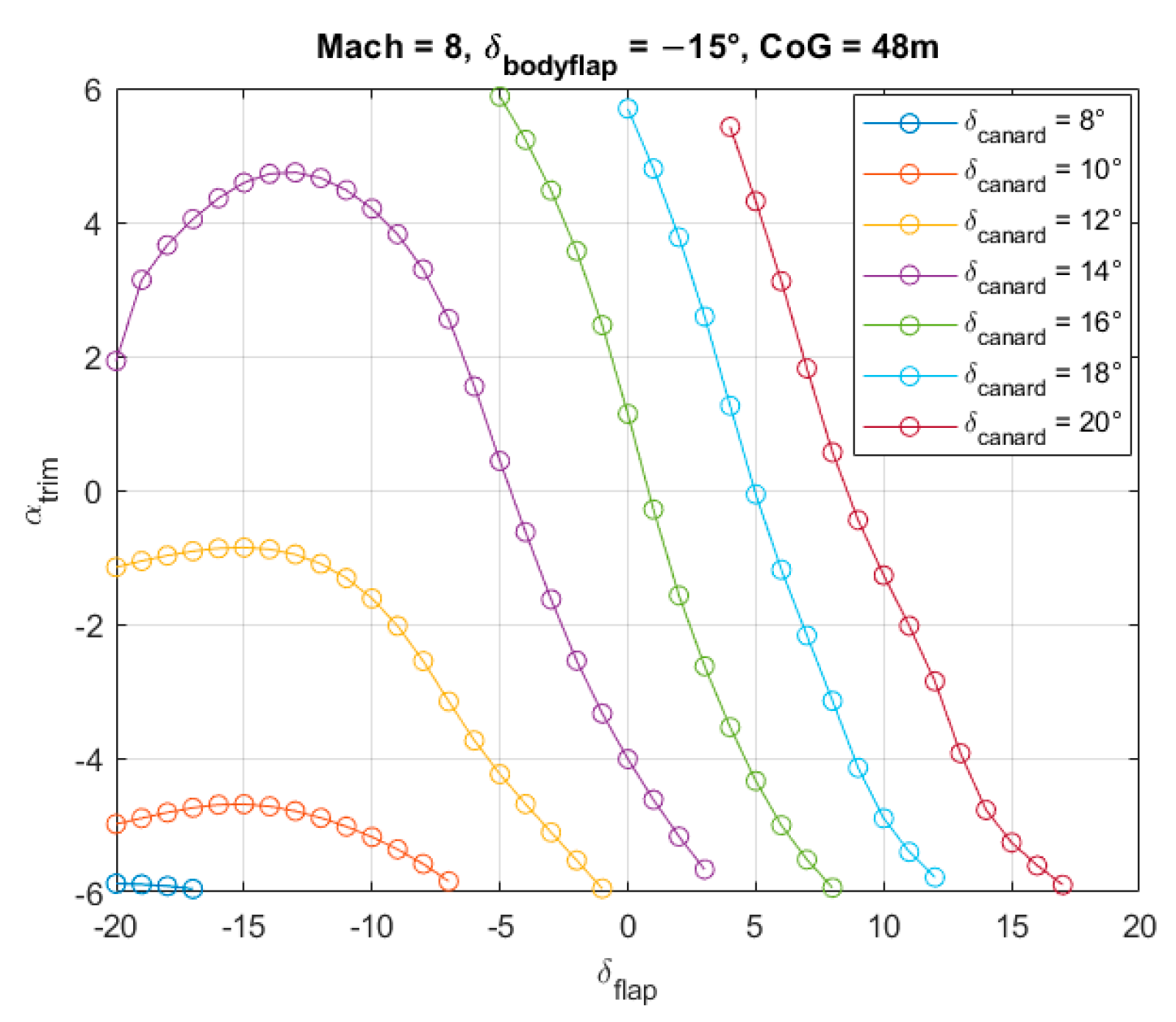
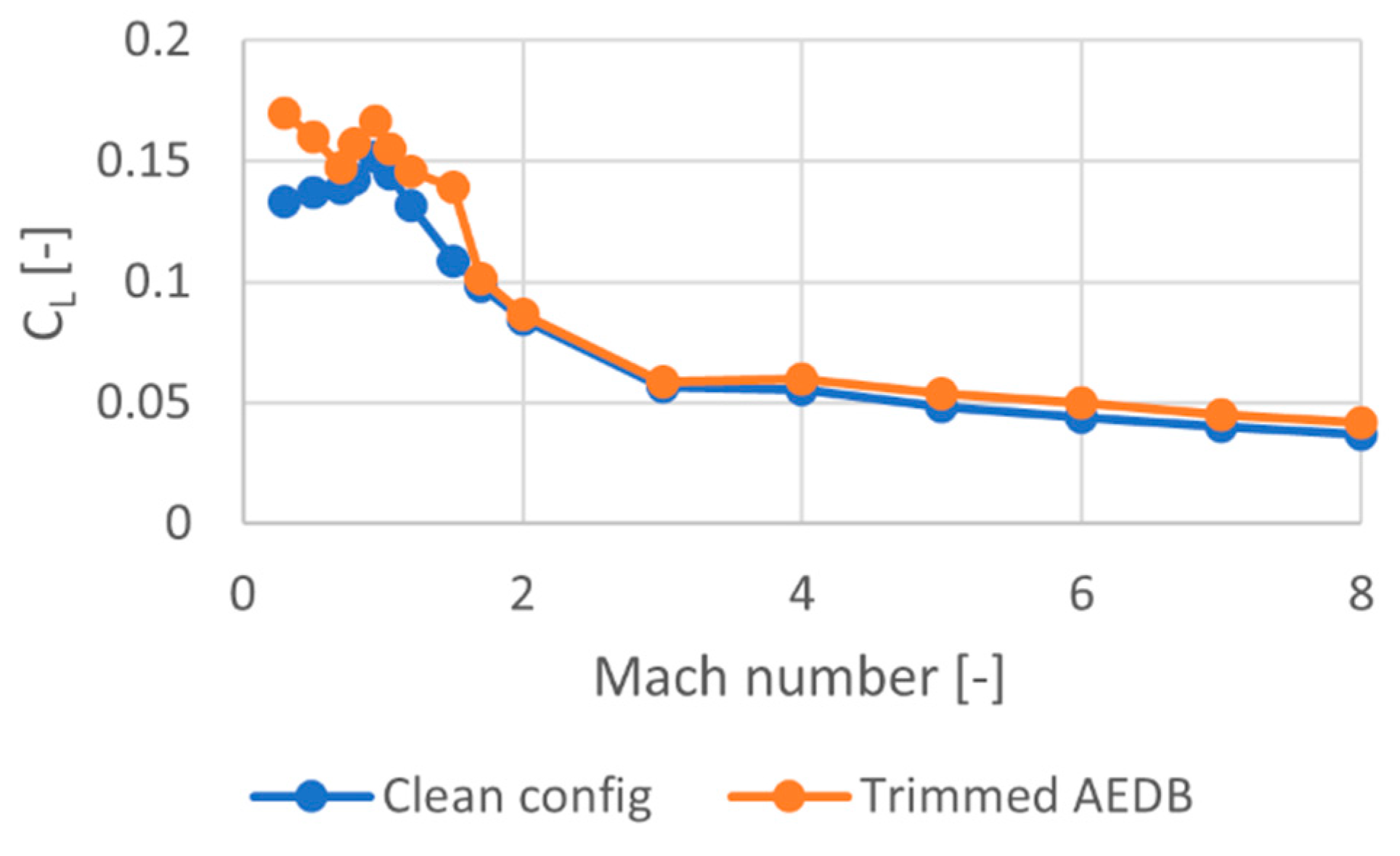
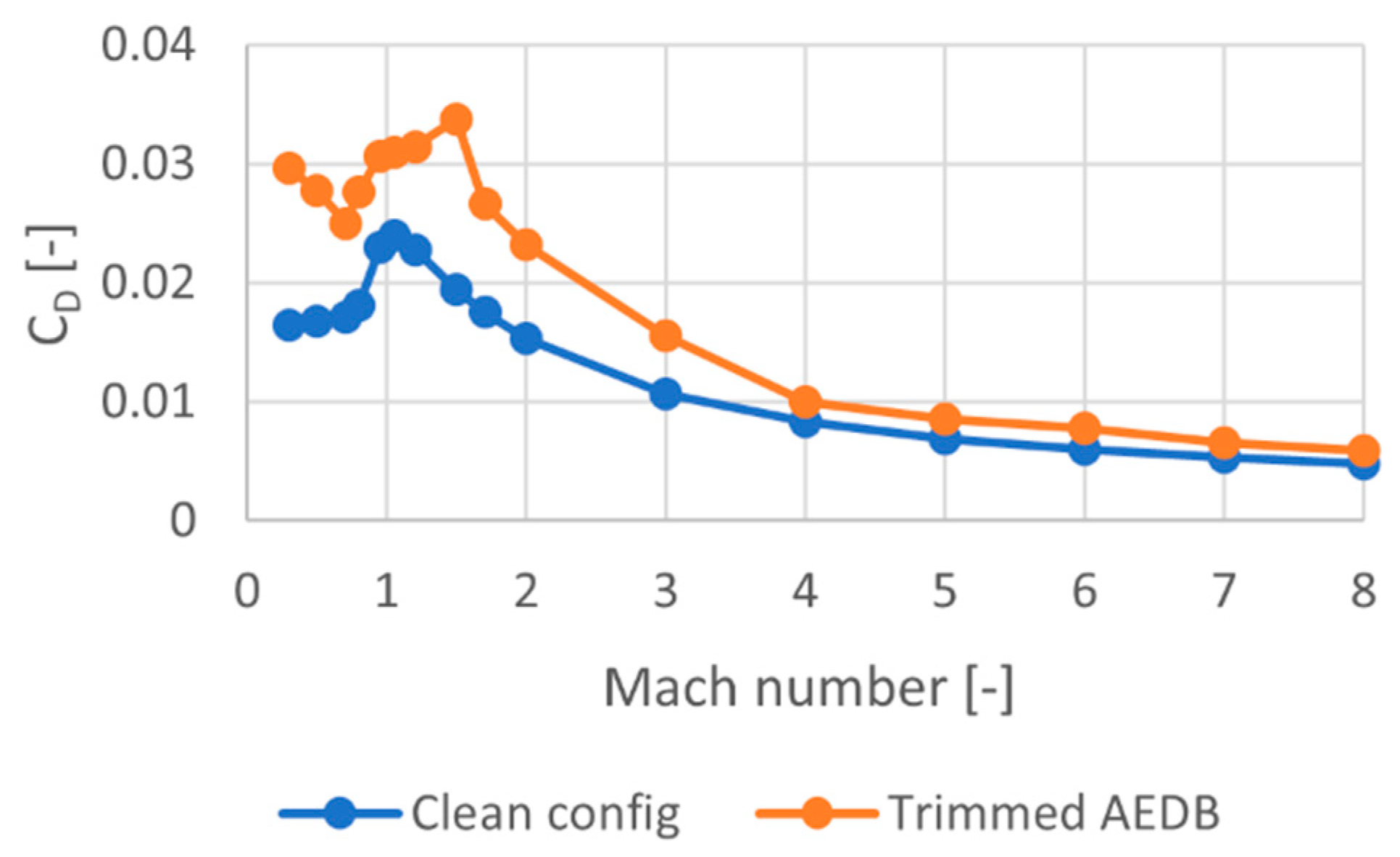
4.3. Trim Analysis
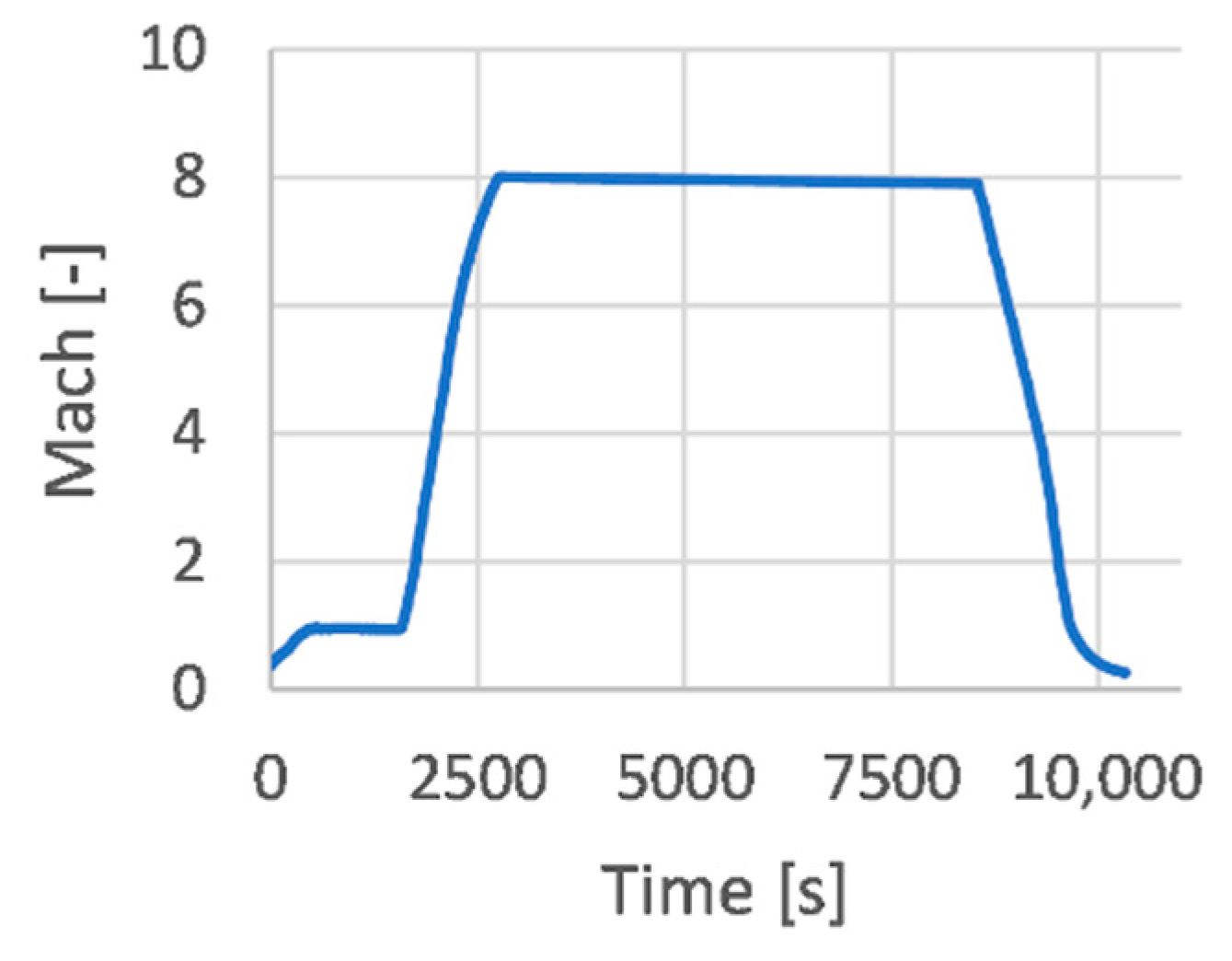
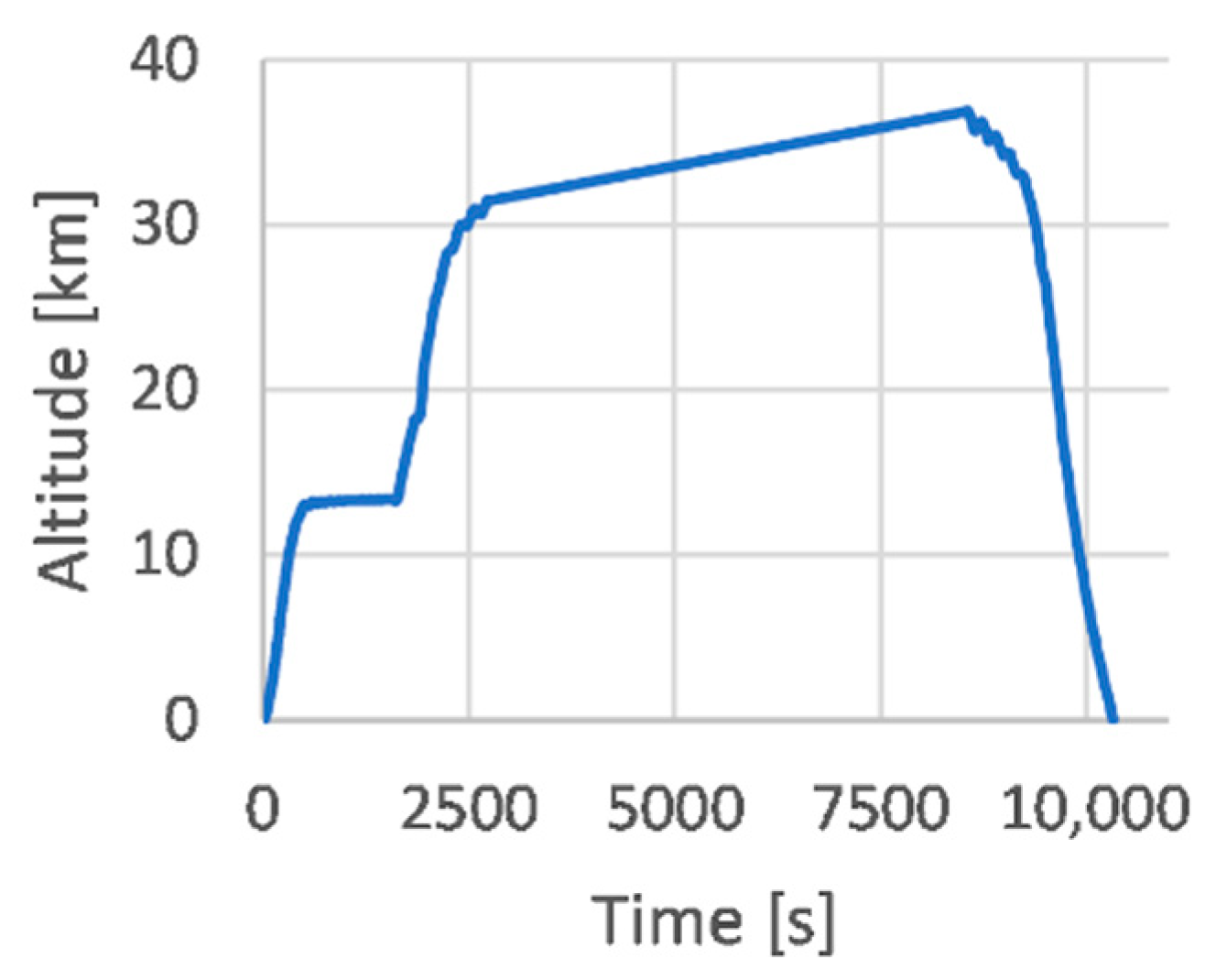
4.4. Mission Analysis with Trimmed Configuration: BRU-SYD Mission Simulation
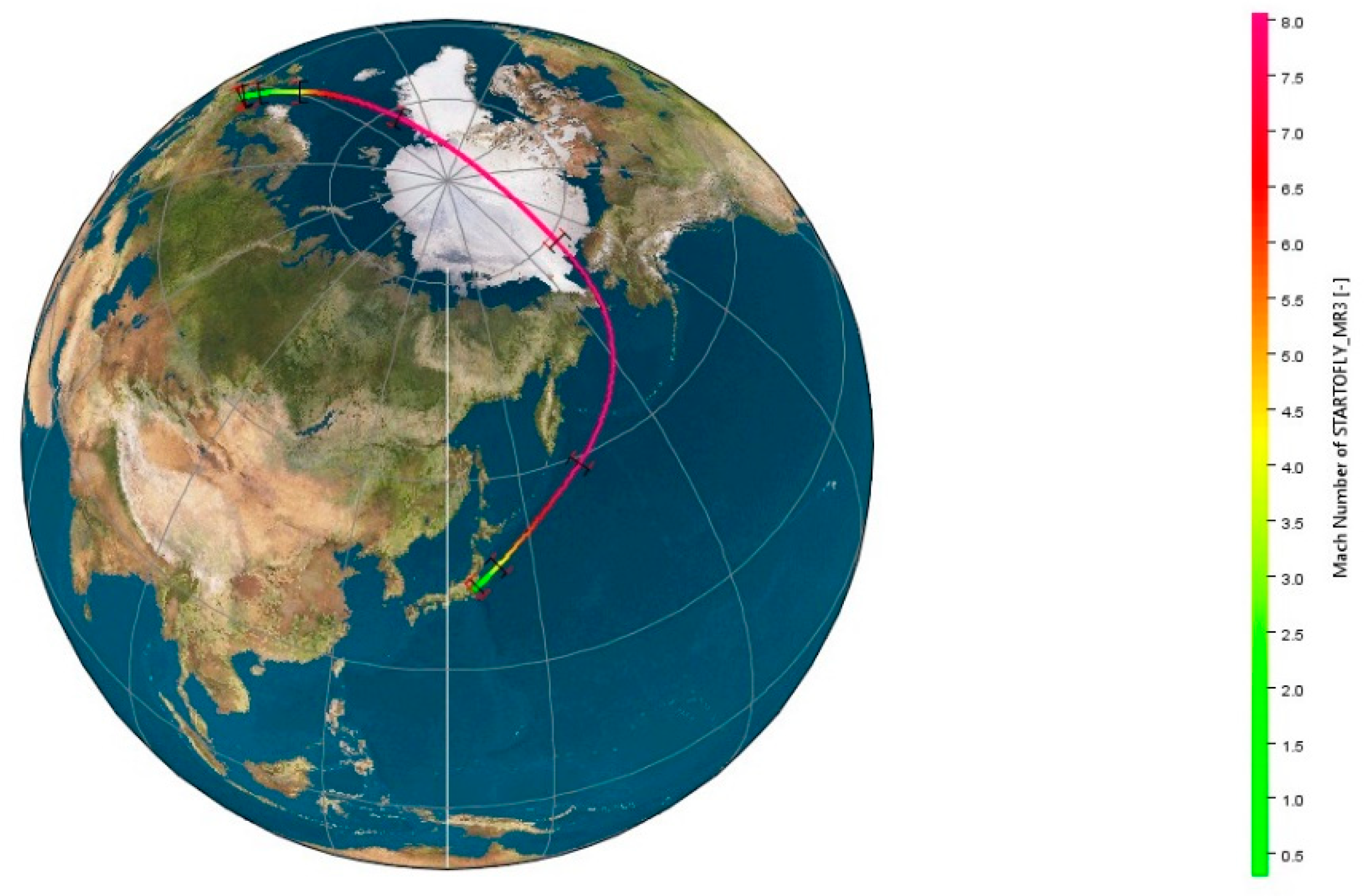
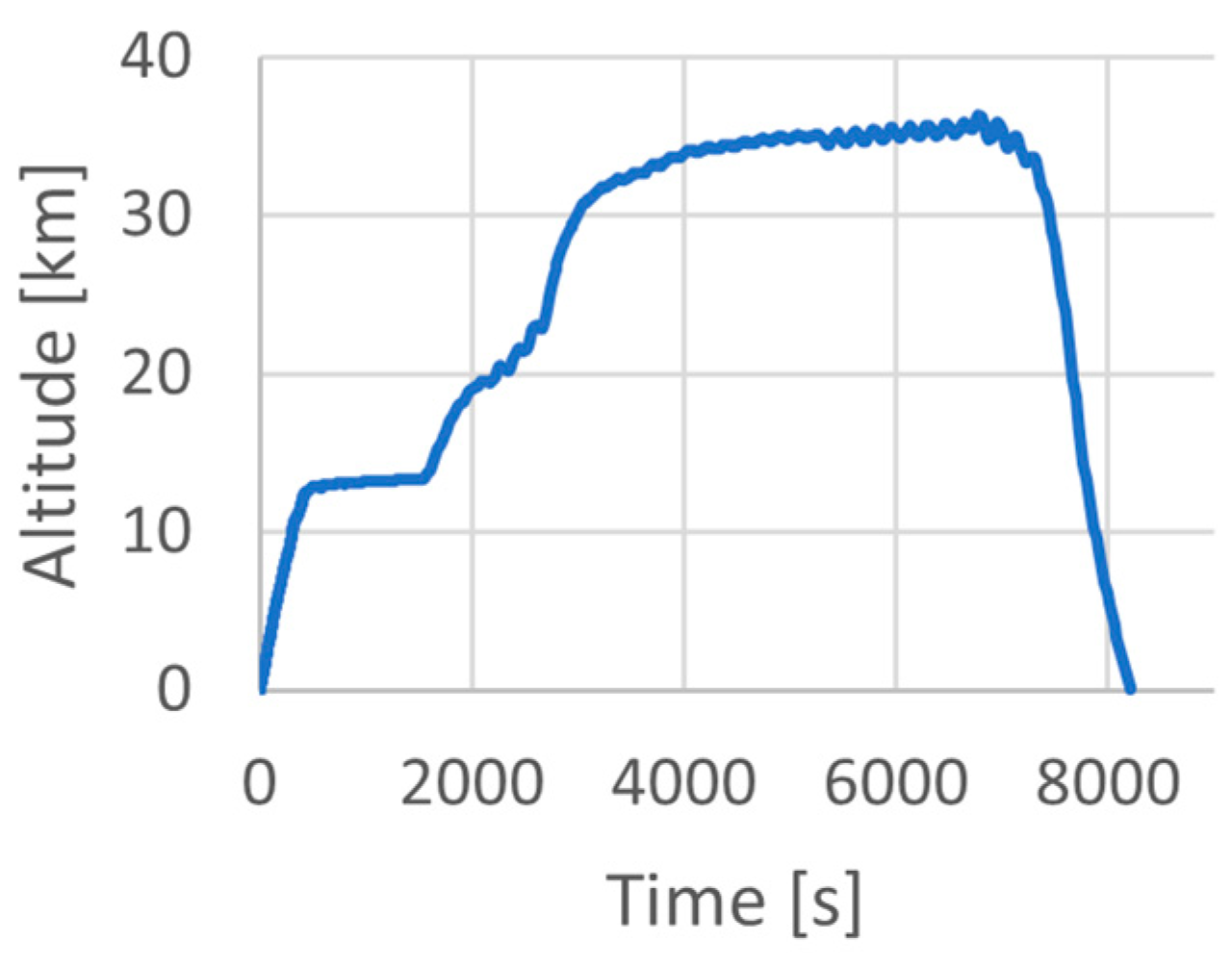
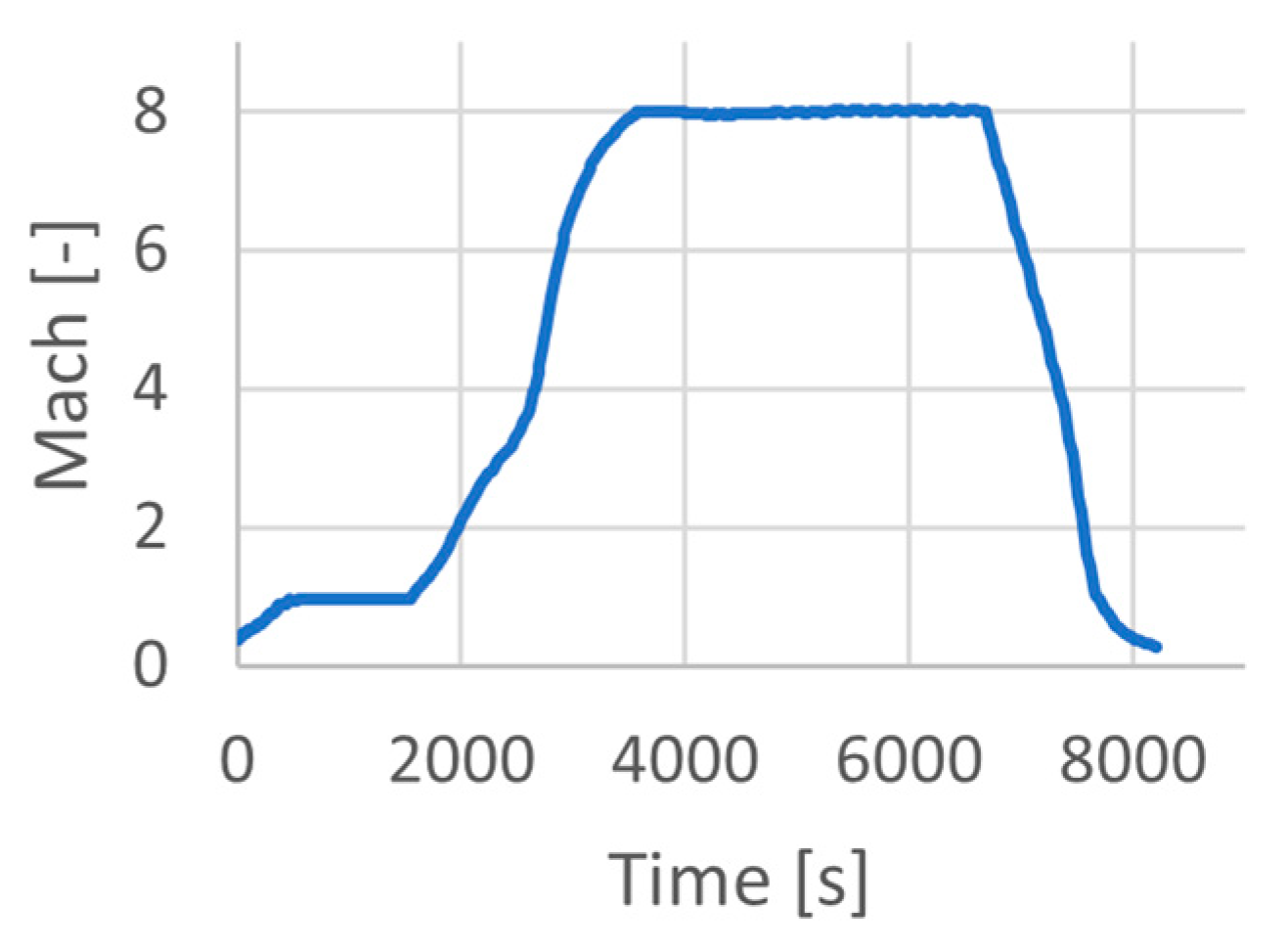
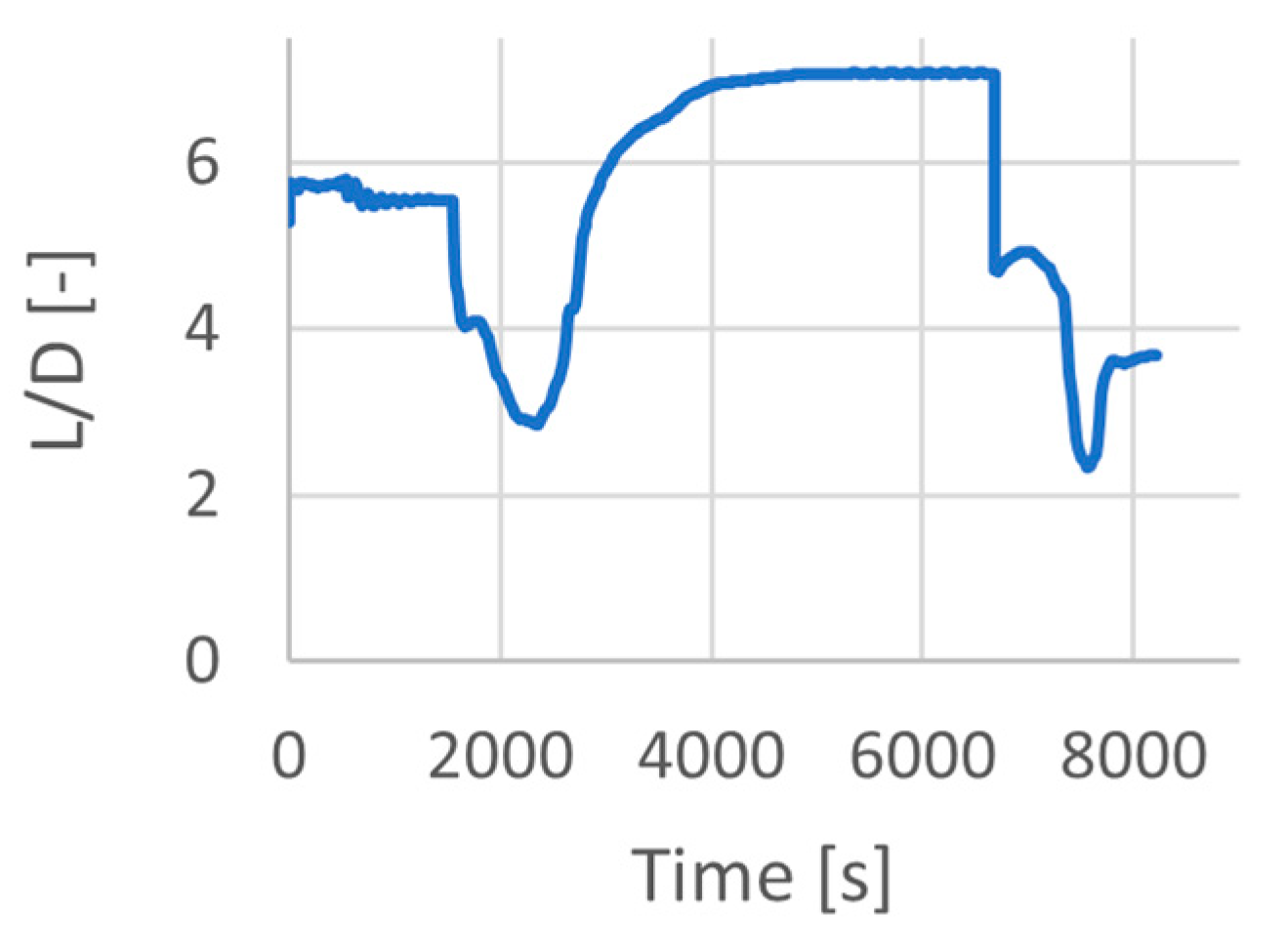
4.5. Mission Analysis with Trimmed Configuration: BRU-NRT Mission Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Steelant, J.; Varvill, R.; Walton, C.; Defoort, S.; Hannemann, K.; Marini, M. Achievements obtained for sustained hypersonic flight within the LAPCAT-II project. In Proceedings of the 20th AIAA International Space Planes and Hypersonic Systems and Technologies Conference, Glasgow, Scotland, 6–9 July 2015; p. 3677. [Google Scholar] [CrossRef]
- Viola, N.; Fusaro, R.; Gori, O.; Marini, M.; Roncioni, P.; Saccone, G.; Saracoglu, B.; Ispir, A.C.; Fureby, C.; Nilson, T.; et al. STRATOFLY MR3–how to reduce the environmental impact of high-speed transportation. In Proceedings of the AIAA Scitech 2021 Forum, Online, 11 January 2021; p. 1877. [Google Scholar] [CrossRef]
- Ferretto, D.; Fusaro, R.; Viola, N. Innovative Multiple Matching Charts approach to support the conceptual design of hypersonic vehicles. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020, 234, 1893–1912. [Google Scholar] [CrossRef]
- Ferretto, D.; Fusaro, R.; Viola, N. A conceptual design tool to support high-speed vehicle design. In Proceedings of the AIAA AVIATION 2020 FORUM, Virtual Event, Online, 15–19 June 2020; p. 2647. [Google Scholar] [CrossRef]
- Langener, T.; Erb, S.; Steelant, J. Trajectory Simulation and Optimization of the LAPCAT MR2 Hypersonic Cruiser Concept. In Proceedings of the 29th Congress of the International Council of the Aeronautical Sciences, St. Petersburg, Russia, 7–12 September 2014. [Google Scholar]
- Pamadi, B.N.; Brauckmann, G.J.; Ruth, M.J.; Fuhrmann, H.D. Aerodynamic Characteristics, Database Development and Flight Simulation of the X-34 Vehicle. In Proceedings of the 38th Aerospace Sciences Meeting & Exhibit, Reno, NV, USA, 10–13 January 2000. [Google Scholar] [CrossRef] [Green Version]
- Roncioni, P.; Rufolo, G.C.; Votta, R.; Marini, M. An Extrapolation-To-Flight Methodology for Wind Tunnel Measurements Applied to the Prora-USV FTB1 Vehicle. In Proceedings of the 57th International Astronautical Congress, Valencia, Spain, 2–6 October 2006. [Google Scholar] [CrossRef]
- Rufolo, G.C.; Roncioni, P.; Marini, M.; Votta, R.; Palazzo, S. Experimental and Numerical Aerodynamic Data Integration and Aerodatabase Development for the PRORA-USV-FTB_1 Reusable Vehicle. In Proceedings of the 14th AIAA/AHI Space Planes and Hypersonic Systems and Technologies Conference, Canberra, Australia, 6–9 November 2006. [Google Scholar] [CrossRef]
- Bonelli, F.; Cutrone, L.; Votta, R.; Viggiano, A.; Magi, V. Preliminary design of a hypersonic air-breathing vehicle. In Proceedings of the 17th AIAA International Space Planes and Hypersonic Systems and Technologies Conference, AIAA 2011-2319, San Francisco, CA, USA, 11–14 April 2011. [Google Scholar] [CrossRef]
- Schlichting, H. Boundary Layer Theory; McGRAW-HILL: New York, NY, USA, 1979. [Google Scholar]
- Raymer, D. Aircraft Design: A Conceptual Approach, 5th ed.; AIAA: Reston, VA, USA, 2012. [Google Scholar]
- Deng, A. Aerodynamic Performance Prediction of SpaceShipTwo. December 2012. Available online: https://www.researchgate.net/publication/289538639_Aerodynamic_Performance_Prediction_of_SpaceShipTwo (accessed on 15 June 2021).
- Fluent Theory Guide; Release 19.2; ANSYS, Inc.: Canonsburg, PA, USA, 2018.












































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit of Measure |
|---|---|---|
| Length | 94 | |
| Wingspan | 41 | |
| Wing surface | 1365 | |
| Aspect ratio | ~1 | - |
| Initial Condition | Value |
|---|---|
| Latitude | 50.9° |
| Longitude | 4.49° |
| Altitude | 0 m |
| Velocity | 128 m/s |
| Heading | −15° |
| Coefficient | Clean Config | Viscous Correction | Canards | Flaps | Bodyflap | Thrust Correction |
|---|---|---|---|---|---|---|
| CL | x | x | x | x | ||
| CD | x | x | x | x | x | |
| CMy | x | x | x | x | x |
| Mach (-) | Alpha (°) | CL (-) | CD (-) | L/D (-) | δflap (°) | δcanard (°) | δbodyflap (°) | CoG (m) |
|---|---|---|---|---|---|---|---|---|
| 0.5 | −2 | 0.118 | 0.021 | 5.49 | 4.15 | 11 | −26 | 53 |
| 0.5 | 0 | 0.160 | 0.028 | 5.75 | 4.9 | 7 | −29 | 53 |
| 0.5 | 2 | 0.220 | 0.041 | 5.33 | 6.55 | 10 | −30 | 53 |
| … | … | … | … | … | … | … | … | … |
| 0.95 | −2 | 0.121 | 0.025 | 4.83 | −6.6 | 16 | −1 | 51.5 |
| 0.95 | 0 | 0.167 | 0.031 | 5.43 | −6.2 | 13 | −7 | 51.5 |
| 0.95 | 2 | 0.215 | 0.041 | 5.29 | −7.6 | 12 | −5 | 51.5 |
| … | … | … | … | … | … | … | … | … |
| 3 | −2 | 0.036 | 0.017 | 2.14 | 2.95 | 20 | −20 | 50.5 |
| 3 | 0 | 0.059 | 0.016 | 3.77 | −7.95 | 13 | −23 | 50.5 |
| 3 | 2 | 0.103 | 0.023 | 4.58 | −18.1 | 16 | −4 | 50.5 |
| … | … | … | … | … | … | … | … | … |
| 8 | −2 | 0.020 | 0.004 | 5.37 | −11.15 | 12 | −2 | 48 |
| 8 | 0 | 0.042 | 0.006 | 7.05 | −7.55 | 13 | −3 | 48 |
| 8 | 2 | 0.064 | 0.010 | 6.63 | −10.4 | 13 | −5 | 48 |
| Route | Aerodynamic Configuration | Mission Completed? | Distance flown (km) | Residual fuel (Mg) | Time (hr:min) |
|---|---|---|---|---|---|
| Brussels to Sydney | Clean | Yes | 18,200 | 1.00 | 2 h 52 m |
| Trimmed and stable | No | 12,200 | 0.00 | 2 h 8 m | |
| Trimmed and unstable | No | 12,600 | 0.00 | 2 h 5 m | |
| Brussels to Tokyo | Trimmed and unstable | Yes | 12,245 | 10.45 | 2 h 17 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Viola, N.; Roncioni, P.; Gori, O.; Fusaro, R. Aerodynamic Characterization of Hypersonic Transportation Systems and Its Impact on Mission Analysis. Energies 2021, 14, 3580. https://doi.org/10.3390/en14123580
Viola N, Roncioni P, Gori O, Fusaro R. Aerodynamic Characterization of Hypersonic Transportation Systems and Its Impact on Mission Analysis. Energies. 2021; 14(12):3580. https://doi.org/10.3390/en14123580
Chicago/Turabian StyleViola, Nicole, Pietro Roncioni, Oscar Gori, and Roberta Fusaro. 2021. "Aerodynamic Characterization of Hypersonic Transportation Systems and Its Impact on Mission Analysis" Energies 14, no. 12: 3580. https://doi.org/10.3390/en14123580
APA StyleViola, N., Roncioni, P., Gori, O., & Fusaro, R. (2021). Aerodynamic Characterization of Hypersonic Transportation Systems and Its Impact on Mission Analysis. Energies, 14(12), 3580. https://doi.org/10.3390/en14123580