1. Introduction
The European SET-Plan (European Strategic Energy Technology Plan) has stated the necessity of diverting its energy supply towards the use of an energy system that reduces carbon emissions, developing competitive technologies that exploit renewable sources [
1].
Subsequently, through the Green Deal Plan, the European Community is committed to achieving climate neutrality by 2050, transforming Europe into a sustainable society [
2]. In these plans, particular importance is given to marine renewable energies, derived from wind, wave and solar resources, currents and tides, which have become essential for a complete energy transition towards clean energy. Among these, offshore renewable energies could potentially increase future power generation in a massive and affordable way [
3].
Wind energy plays a key role in the offshore sector. Currently, the most widespread technology is that of a fixed foundation [
4], mainly the monopile type. The choice of this technology is linked to the depth of the seabed; it is typically used in “shallow waters” of 0–25 m. As the depth of the seabed increases, needing tripod and jacket foundations, it is necessary to switch to floating technology. To fully exploit the resources, it is necessary to move further offshore; however, in many cases, the depths are too deep at even a few kilometers from the coast, so the need for a reliable floating technology is very important [
5]. For this reason, research and industry are striving to develop new floating technologies and consolidate existing ones. Europe’s floating wind fleet is the largest worldwide (70%) producing a total of 45 MW by the end of 2019 [
4]. Demonstration projects have tested different floating concepts [
6], sometimes associating wind turbines with wave energy converters [
7,
8,
9] with the objective to reducing costs or upscaling previous model-scale devices. However, in other countries, the feasibility of this type of device has been evaluated [
10,
11].
FOWT are usually classified into three categories based on the static stability mechanism. Semi-submersible structures achieve stability by balancing weight and buoyancy of the floater in operational conditions; tension leg platforms are stable due to a tensioned tendon mooring system; and spar buoy platforms are stable depending on the relative location between the center of buoyancy and the center of gravity. However, the last of these are relatively easy to build if compared them to TLPs and semi-submersibles and they are known for a lower dynamic response per displacement [
12].
To date, the design of FOWTs is founded on three basic tools: semi-empirical formulations, physical modeling and numerical modeling. In particular, a combination of physical and numerical models to analyze the complexity in the hydrodynamics, aerodynamics and structural stresses it is being increasingly used. Nevertheless, physical modeling in a laboratory is still the worldwide accepted standard for the design of a FOWT structure, especially when the “proof of concept” or a very detailed study on the FOWT’s behavior is required. It is worth considering that the use of small-scale models is not always sufficient to obtain an accurate structural response of such complex structures. A clear understanding of scaling laws applied to FOWT design remain a setback [
13,
14,
15,
16,
17,
18]. However, simplified Froude-scaled experiments represent a necessary path to large or full-scale prototypes, and are essential to have complete knowledge of the overall wind/wave-structure interaction phenomena.
The first FOWT pilot, the Hywind Demo, was installed almost 12 years ago, 10 km away from the southwest coastline of Norway in 2009 by Statoil (now Equinor) [
19]. Although it only has a capacity of 2.3 MW, it achieved a historic breakthrough in the operation of FOWTs.
Since then, large efforts to better understand the phenomena involved in the dynamic behavior of the spar buoy FOWT have been made by researchers and industries [
20].
Based on the Hywind platform prototype, a reference model with a NREL 5 MW wind turbine installed, was developed [
21]. Through this model, it has been possible to summarize the main differences between the existing numerical codes and to define shared procedures for designing FOWTs [
22,
23]. Moreover, experimental tests carried out on the basin at the Maritime Research Institute Netherlands (MARIN) with a 1:50 Froude-scaled model [
24,
25] allowed to calibrate and validate the FAST offshore floating simulation tool [
26].
Results obtained from numerical models needed to be further validated with laboratory tests. For this reason, since 2006, various campaigns have been carried out. The first experiments were performed at MARINTEK in Trondheim, by means of a 1:47 Froude-scaled model subjected to coupled wind and wave loads [
27,
28]. The tests were focused on the dynamic behavior of the system in a 100-year wave condition, in an above-rated wind speed and in average wave conditions, with a below-rated wind speed. The comparison between numerical models showed similar induced wave motions; however, the responses around natural frequencies were overestimated in simulations.
With a larger model scale, 1:22.5, other tests were carried out in Japan by Utsunomiya et al. [
29]. The spar buoy was invested using regular and irregular waves; however, the distribution of the wind load on the rotor was simplified by a constant horizontal force on the tower.
After performing free decay, regular and irregular wave tests on a 1:100 scaled OC3-Hywind concept, experimental results were shown to be in accordance with the numerical ones derived from 3Dfloat and ANSYS by Myhr et al. [
30]; however, smaller motions were obtained during experiments.
Another comparison between experimental tests and numerical model (trough OrcaFlex) was performed on a 1:100 scale wind turbine mounted on a stepped spar with four mooring lines [
31]. In particular, the hydrodynamic response under regular and irregular waves was investigated, and a good agreement in terms of natural frequencies and motion response was obtained.
Nallayarasu and Saravanapriya [
32,
33] investigated the response of a 1:75 model in 250 m deep water under regular and irregular waves, with different mooring systems and angle. They focused on the optimization of the mooring lines configuration in operational conditions and verified data numerically (through Ansys AQWA).
More recently, Grupee et al. (2014), Duan et al. (2016), Ahn e Shin (2019) and Tomasicchio et al. (2018) tested scaled OC3-Spar FOWTs under wind and wave loads. In [
34], wave basin tests were conducted, generating wave and wind conditions, however, the misalignment between the two was not studied. In [
35], a study on the RAOs of a 1:50 OC3 model was carried out, showing that, in yaw, it was strongly influenced by the rotor rotation. Though, the tower was not properly modeled, and the rotor was wind-driven.
In two studies [
36,
37], the capture of the spar platform motions allowed to evaluate the RAOs. In particular, in [
37] the downscaling of the model (1:128) disabled the full matching of the blades with the prototype ones; however, the numerical simulation showed a slight agreement with the experimental tests in regular and irregular waves.
A considerable amount of sea states was tested on a 1:40 model of OC3-Hywind spar in 2014, as part of Hydralab IV. Experimental results are reported in [
38], however in this campaign the wind loads were simulated through a static weight. These tests, carried out in the DHI Offshore Wave Basin in Hørsholm (Denmark), were preliminarily compared with the responses obtained through the FAST code [
39].
In order to investigate the behavior of an OC3-Spar in a real environment, Ruzzo et al. [
40] installed a 1:30 scale model at sea at the Natural Ocean Engineering Laboratory (NOEL) in Reggio Calabria (Italy).
When designing a spar buoy wind turbine, the limitation of pitch motion is crucial. Large pitch motions could undermine the gyroscopic stability of the hull because of the instantaneous change in the relative wind direction on the rotor [
24]. For this reason, the use of pitch control becomes of primary importance [
12].
The effect of a collective pitch control under a wind generator with rotating blades is investigated in this article. Laboratory tests are related to a 1:40 OC3-spar buoy scaled model. Experimental campaign was carried out at the Danish Hydraulic Institute -DHI in Hørsholm (Denmark) within the framework of the EU-Hydralab+ project, in March–April 2019. Its main aim was to compare the dynamic and hydrodynamic responses of the FOWT under different combined action of wind and wave loads in the presence of a wind generator. The data provides a comprehensive and controlled series of test for calibration and validation of numerical models.
This paper extends the preliminary results obtained in [
41]. Special attention has been paid on the response under different wind loads of the structure subjected to waves having increasing steepness. It is organized as follows: in
Section 2, details of experimental instrumentation, set-up and test program are described.
Section 3 reports the results and discussion obtained through examining the natural frequencies of the structure and its response under regular waves in the frequency domain.
In particular, results are focused on the DoFs of the structure, on the forces and acceleration on the nacelle, on the thrust force, and on the mooring line response. Finally, in
Section 4, some conclusions and remarks are drawn.
2. Experimental Set-Up and Procedures
In
Section 2.1, the test facility, the instrumentation equipping the structure and the configuration used during tests are described. The floating wind turbine investigated in this work was composed of three main parts, discussed in detail in
Section 2.2:
the wind turbine,
the floater (spar buoy),
the mooring system.
2.1. Test Facility and Instrumentation
The DHI wave basin was 20 m long, 30 m wide and 3 m deep. In the center of the wave basin, a 3 m × 3 m pit with a depth of 6 m was installed. By placing the tested floating structure in the middle of this pit, deep water conditions occurred, allowing to simulate real scale behavior.
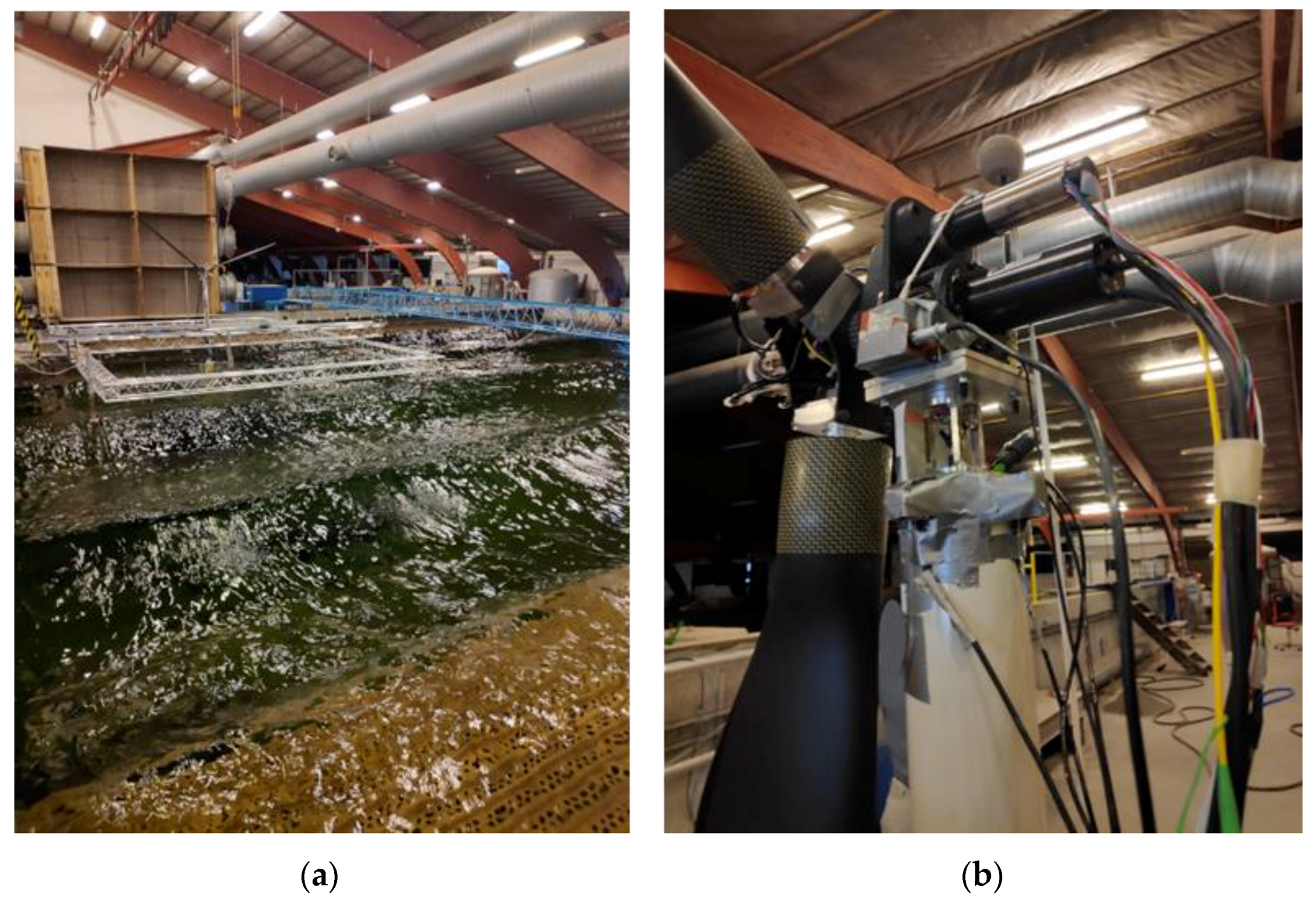
Regular and irregular waves, both unidirectional and directional, were generated by sixty individually controlled flaps equipping the wave maker. To minimize reflection, a 6.5 m long sloping wave absorber was located opposite to the wave maker. Wind loads instead, were ensured by six wind generators placed in front of the model (
Figure 1a).
The origin of the global coordinate system was chosen to be on the right corner of the basin in correspondence with the first flap, with a positive x-axis according to the wave propagation direction.
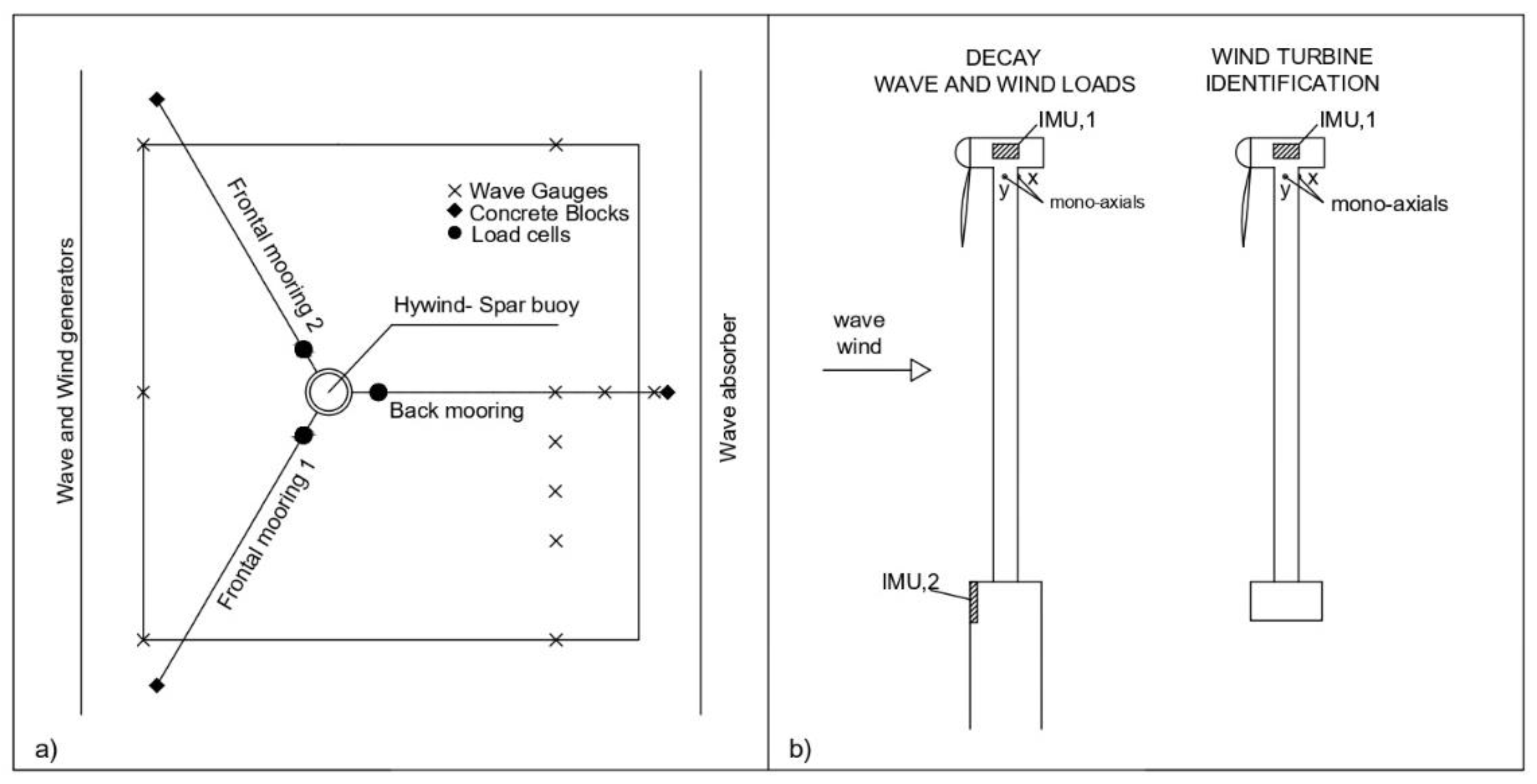
The free surface elevation was captured by eleven wave gauges placed around the structure (
Figure 2a). Three of these were placed in row, perpendicular to the wave direction, 1.5 m before the structure. A row of six gauges was placed 1 m behind it. Moreover, two additional wave gauges were placed behind the model in order to estimate the incident and reflected waves [
42]. An anemometer measuring wind speed was placed 1.5 m before the structure. Concerning the floating structure, a very large number of sensors was used to measure its behavior (
Figure 1b).
In the wind turbine rotor, an encoder allowed the measurement of the angular velocity of the generator, and, beside it, enabled to track the reference for the blade’s pitch. An inertial platform unit (IMU), measuring translational and angular acceleration along the three main axes, was placed in correspondence with the nacelle. The RNA (rotor–nacelle-assembly) system was connected to the tower by means of a four-component force gauge, measuring force and moments along the x (orthogonal to rotor) and y (parallel to rotor) directions. Immediately below the tower, two mono-axial accelerometers were placed, capturing accelerations along the global x and y axes.
The upper part of the tower was directly connected to the spar buoy platform, where another inertial platform captured the accelerations along the axes.
The spar buoy was kept in position by the mooring system, which was mainly composed of three mooring lines; on each of these, a load cell measuring tension due to the spar motion was placed (
Figure 2a).
Translations and rotations of the overall structure were recorded through a Qualisys tracking system, consisting of two cameras emitting infrared light, reflected by 40 mm diameter spherical markers. The markers were mounted both at the connection between tower and the spar buoy, and in correspondence with the RNA. All observed data were synchronized by the DHI Wave Synthesizer.
When studying the behavior of the upper part (tower and RNA) as a separate body (i.e., when wind turbine identification and hammer tests were carried out), IMUs and mono-axials accelerometers were differently positioned, as shown in
Figure 2b.
2.2. Model Design
In this subsection the three components of the floating structure are discussed in detail.
2.2.1. Wind Turbine
The wind turbine was designed, downscaling (1:40) the reference model NREL 5 MW [
43], in accordance with Froude similarity rule. Nevertheless, in order to match the reference thrust and torque, the rotor was defined as a geometrical upscale of the wind turbine model developed by Politecnico di Milano [
44], a wind turbine model of the DTU10MW reference wind turbine [
45]. The scaled characteristics are reported in
Table 1.
Concerning the airfoils, SD7032s were chosen, allowing to have better performance at lower Reynolds number characterizing the airfoil aerodynamic.
Starting from NREL 5 MW control system, the Hydralab+ wind turbine was based on variable speed-collective pitch control strategy, allowing the turbine to operate in different conditions. The blade pitch actuator operated the rotation of the rotor blades about their pitch axis. With the blade pitch angle set at the full-power angle, maximum power is extracted from the incident wind flow field. As the blade pitch angle is rotated toward the full feather position, the blades become less efficient at converting the power in the wind flow field to shaft power. In particular, the operating area of the wind turbine can be divided in three regions depending on the wind speed value. These are:
Region 1, below the cut-in wind speed, used for the start-up of the wind turbine.
Region 2, between cut-in and rated wind speed, where the turbine worked at partial load. The blade pitch was fixed at minimum, while the turbine was regulated at variable speed through the torque controller, in order to optimize the power extraction.
Region 3, extending from rated wind speed to cut-off, in which the turbine worked at full load. The generator torque was kept at the rated value, the turbine operation was regulated by blade pitch-to-feather controller, in order to regulate rotor speed and power.
2.2.2. Floating Platform
The floating platform supporting the wind turbine was a Froude 1:40 downscaled version of the OC3-Hywind spar buoy designed in 2010 by Jonkman [
21].
The spar buoy, as used in the previous experimental campaign [
39], was composed of three main sections:
the upper cylinder, with a length of 400 mm and an outer diameter of 162.5 mm;
the lower cylinder, comprehending most of the height of the spar, 2.6 m, and an outer diameter of 235 mm;
the tapered transition part, connecting the upper and the lower cylinder and developing for 200 mm.
Furthermore, a 100 mm removable bottom filled with lead grains was added to the lower cylinder. Its main function was to reach the draft of 3 m and the center of gravity of 2.25 m below the still water level (SWL hereinafter).
A removable bottom of 100 mm in height was used to place an additional ballast. The downscaled properties of the spar buoy are listed in
Table 2.
2.2.3. Mooring System
The mooring system was composed of three mooring lines, two in front of and one behind the model, forming a horizontal angle of 120° each other. As already simplified in the OC3-project [
21], the original delta connections provided for Statoil’s Hywind catenary system were eliminated and each mooring line was connected to the floater through a collar at a vertical distance of 1.75 m from the SWL.
The limited water depth of the basin led to an additional simplification, reducing each mooring line in a series of seven springs. These springs adequately pretensioned, allowed to obtain the same surge and sway behavior and the same center of gravity of the OC3-Project mooring system. Following the springs, a rope composed of Dyneema fiber connected each mooring line to an anchor (concrete block) resting on the basin floor 3 m below the SWL. The properties of the mooring system are summarized in
Table 3.
2.3. Test Program
The experimental tests were carried out considering different wind and wave conditions. In the following subsections, for each type of test, the motivation and experimental procedure are explained; moreover, tables containing the test program are presented.
2.3.1. Wave Calibration and Wind Turbine Set-Up
Before performing tests under wind and wave loads, calibration of the exciting forces was needed. Concerning the calibration of the basin, both regular and irregular waves that would have been tested later were run. Clearly, in this phase, the structure was not present in the basin. It is worth noting that, for regular waves, tests had a duration from 2 to 4 min (time necessary to have around 100 waves). The time duration for the irregular tests was instead determined to fit a number of waves of around 1000. For instance, extreme conditions duration time was between 20 and 30 min [
46,
47].
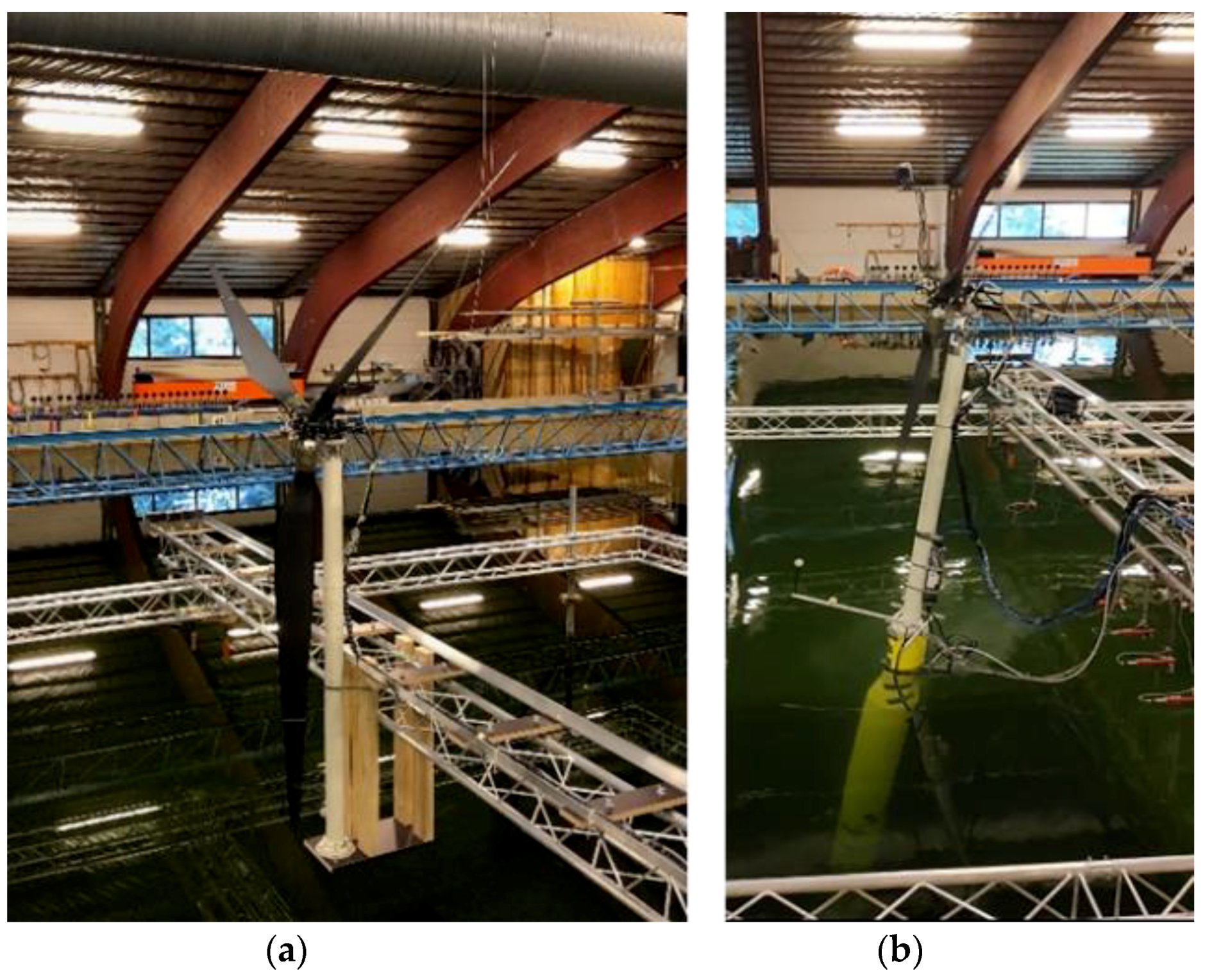
To evaluate the contribution of the wind turbine in the whole structure response, two sets of tests were conducted. As first, the turbine was tested outside of the water, by linking the upper structure to the aluminum cage placed in front of the wind generator (defined as wind turbine set-up test, as in
Figure 3a. Secondly, the upper structure was mounted on the spar buoy and only wind impacted on it (referred as only wind tests, as in
Figure 3b. In both this configuration all the wind conditions, without generating waves, were tested. Changes in wind condition allowed to evaluate the different controlling behavior of the turbine.
2.3.2. Decay Test
Decay tests were carried out to define the natural frequencies and total system damping for each degree of freedom (hereinafter DoF or DoFs when plural). These were run with and without the mooring lines, where possible. In addition, different wind speeds were applied while performing tests, underlying the contribution of wind damping (
Table 4).
The time duration for each test depended on the number of representative cycles to obtain the damping and the average period of the oscillations. For this reason, they were repeated several times.
2.3.3. Wind Turbine Natural Frequency and Damping Identification
Natural frequency and damping ratios of the wind turbine were evaluated considering the right-side configuration of
Figure 2. (
a) Plan view of the instruments around the structure. (
b) Sketch of the inertial platforms and mono-axials accelerometers distribution during tests.
For both the x and y directions, the wind turbine was pulled at the tower top, then released, and oscillations were recorded through accelerometers. These tests are reported in
Table 5.
2.4. Wind and Wave Conditions
Among all the tests generated during the experimental campaign, the present work focuses on a particular set of regular wave conditions (characterized by significant wave height H, mean wave period T and wave direction DD) as reported in
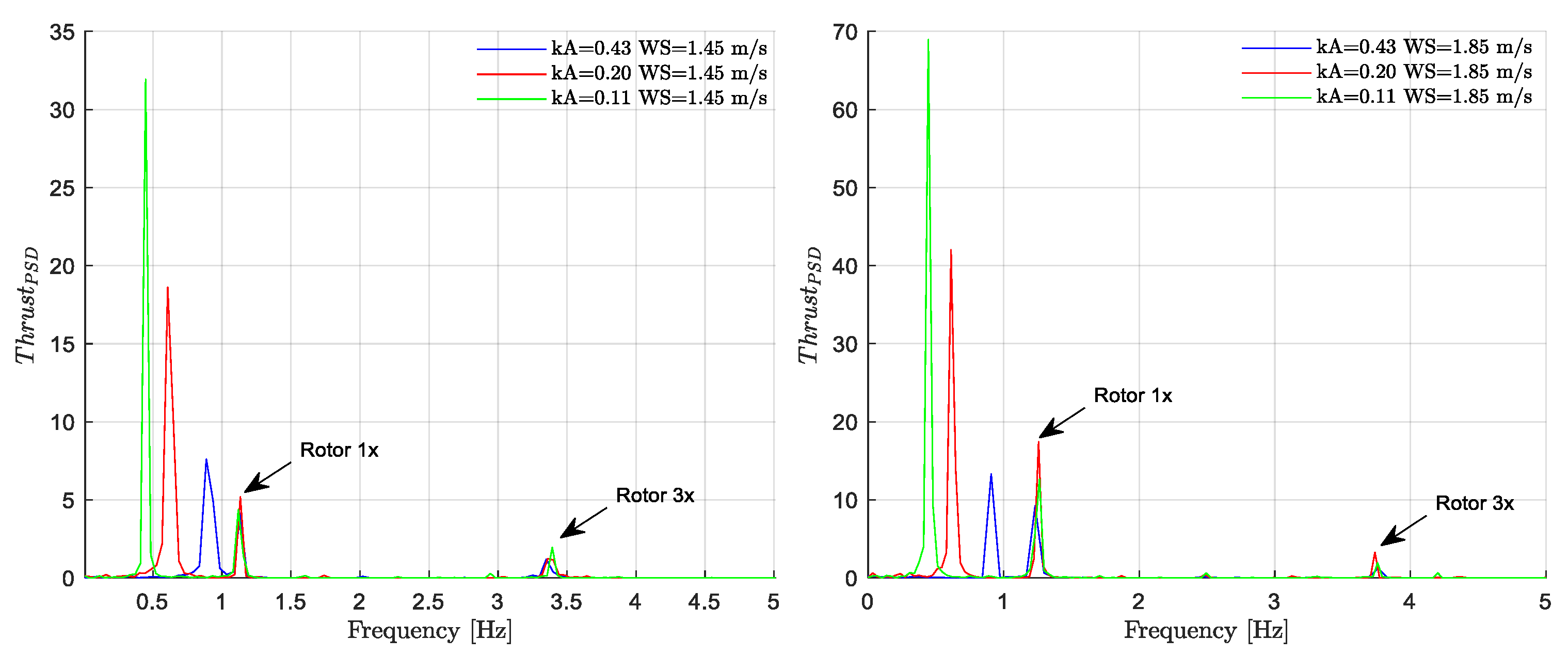
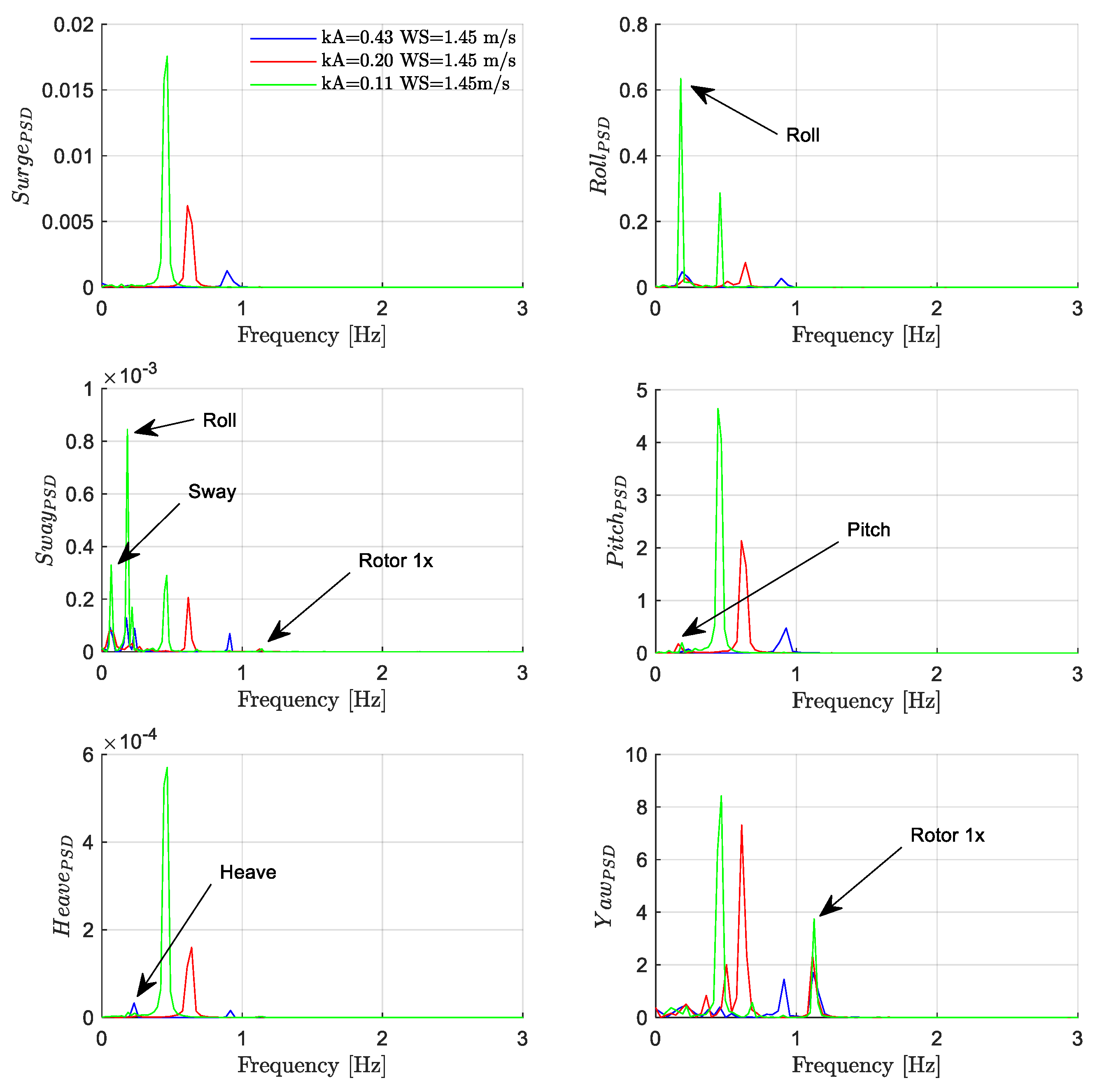
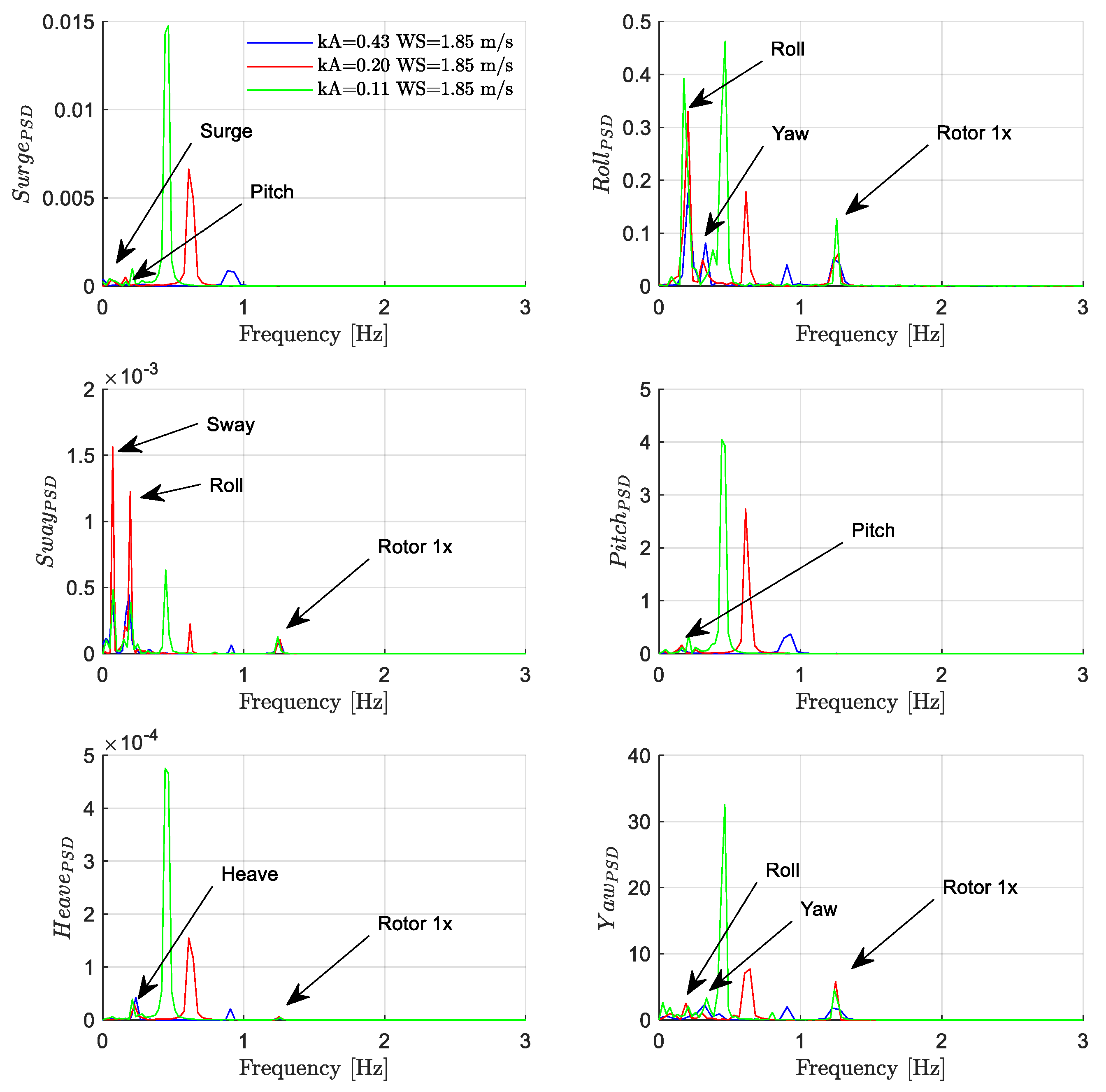
Table 6. First, the structure was only subjected to waves without generation of wind (referred as Regular no-wind in the following). Then, two wind conditions were added: with a wind speed (WS) of 1.45 m/s (Regular Below rated condition) and with a speed of 1.85 m/s (indicated as Regular Above rated).
Keeping the wave height constant, three period were considered: T = 1.1 s, T = 1.6 s and T = 2.2 s, resulting in three different steepnesses kA (being k the angular wave number and A the first-order wave amplitude): kA = 0.43, kA = 0.20 and kA = 0.11, respectively. The response of the structure under these loads were analyzed in terms of displacement, acceleration, forces and loads.
4. Conclusions and Recommendations
The research describes the experimental tests conducted at the Danish Hydraulic Institute in Hørsholm (Denmark). The test program was designed to investigate the difference in dynamic response of a spar buoy wind turbine under no wind, below and above-rated wind speed, and three values of wave steepness. The peculiarity of the experimental campaign is that the 1:40 Froude-scaled physical model was equipped with pitch-controlled, variable-speed blades. The control effectors (actuators) execute motion in response to commands from the control computer. Three different setups of pitch were selected, according to wind conditions. The observations of the model response enable some general conclusions to be drawn.
As expected, the waves contributed to the majority of the model motions, and their power decreases with increasing steepness.
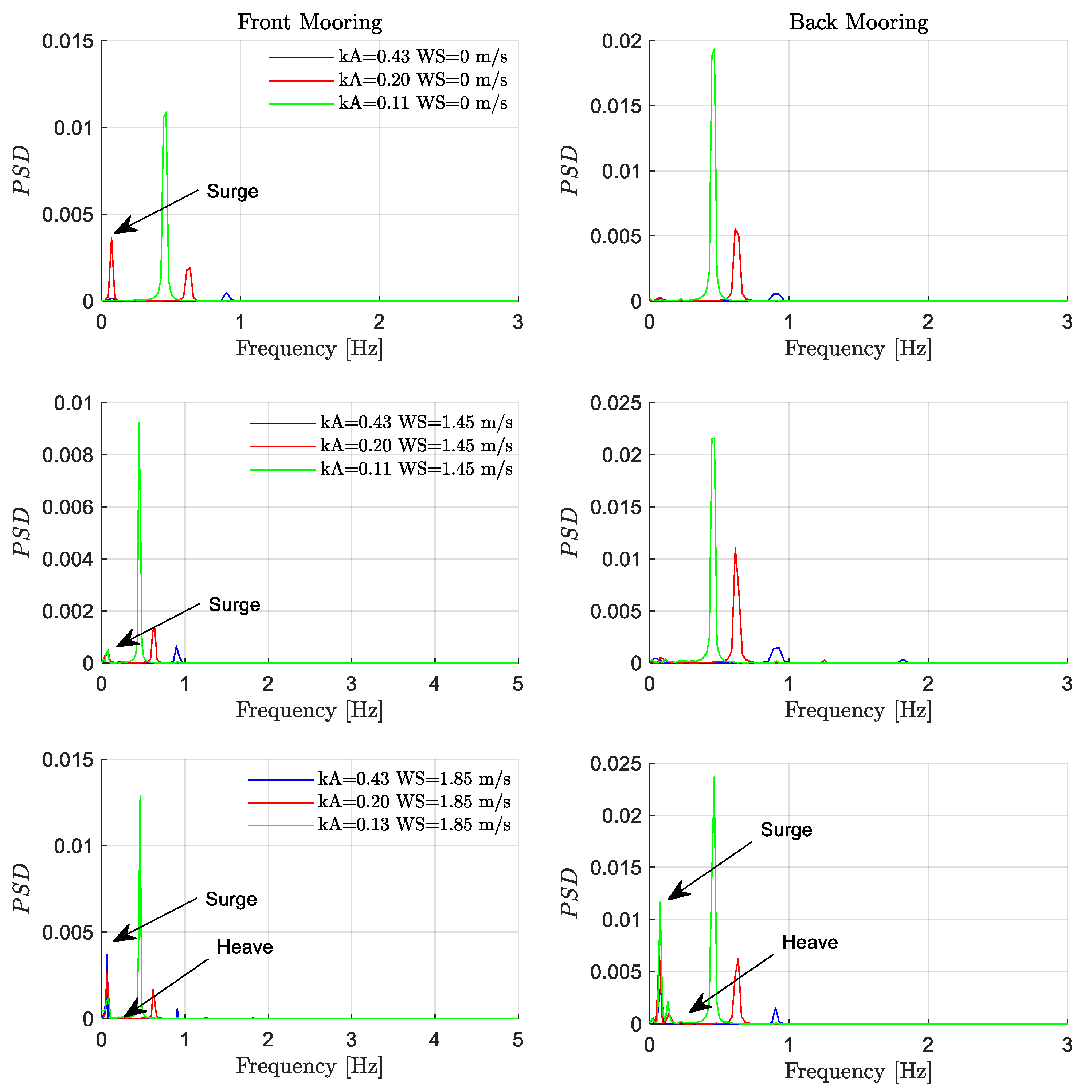
The presence of the mooring increases the natural frequency of the system in heave, roll and pitch of about 6, 3 and 10%, respectively. The majority of the tension in the mooring is related to the first harmonic of the waves. The power content is more pronounced in the back mooring for all the wind condition and for all the wave steepnesses. The surge natural frequency is identified to have nonlinear correlation with wind speed in the front mooring lines while, in the back mooring, it appears only in the above-rated condition.
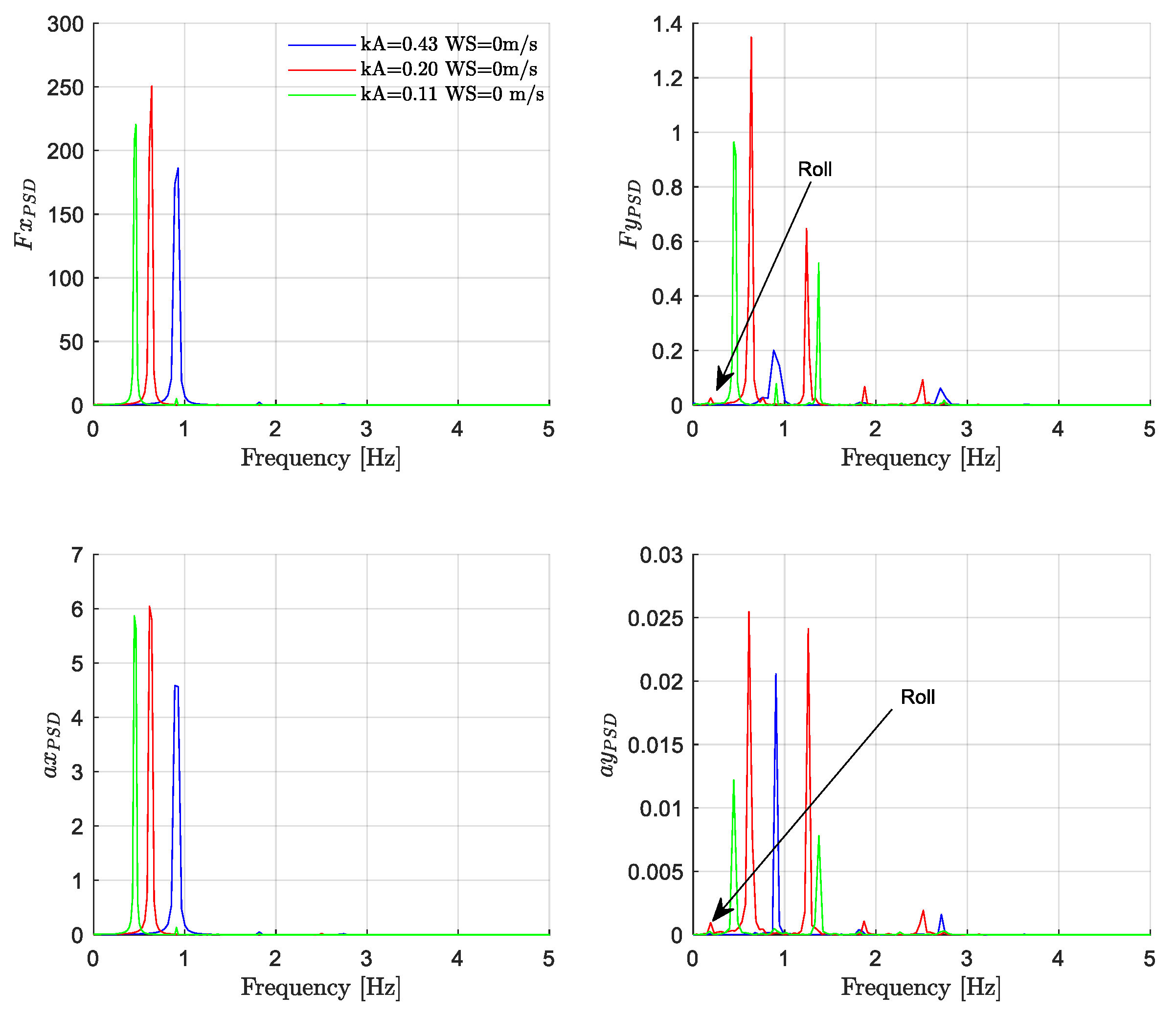
One of the most important result of the present work it is the assessment of the blade rotation role in several aspects. The rotor speed affects the dynamic of the overall structure being the thrust force, the forces and accelerations on the nacelle and the motion of the structure, excited by its harmonics. Concerning the thrust force, the increasing in the wind speed of about 27%, almost doubling the force along y-direction. Forces and accelerations on the nacelle instead, are excited at the first and third harmonic of the rotor speed in y-direction; however, in above-rated condition, also the second harmonic is excited.
The first three harmonics of rotor speed are clearly detected in the along y accelerations of the nacelle. However, the major contribution in terms of excitation is related to the first and third harmonics in below-rated condition, while becoming the power content associated to the second harmonic 1.5 times higher than the third harmonic in above-rated condition.
In addition, the three wave steepnesses presented a slight peak at the rotor frequency in sway and roll in below-rated condition; these peaks are detected also in above-rated condition where, they also occur in heave and roll.
What is surprising is that certain pairs of wind speed-wave steepness become particularly unfavorable, despite the wave energy content. In fact, in the above-rated condition, the energy content of the first rotor harmonic associated with the intermediate sea state is relatively higher than that in the lowest wave steepness (i.e., more energetic sea state). A heuristic explanation for this behavior should be attributable to the coupling between the first harmonics of the wave and the rotor, evidently promoting the generation of some nonlinear behavior.
The basically nontrivial feature of the described results is that the neglect of pitch-controlled, variable-speed blades within physical tests of a spar wind structure could lead to misleading results as to its dynamic behavior. For instance, the definition of extreme forces and fatigue stresses is complicated by a number of factors and motions of different time scales, and confusion can easily be generated when the rotor speed is empirically approximated.
The new dataset provided by this work might represents a comprehensive and controlled series of tests for evaluating and improve currently used numerical models.


 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}