
Fault Ride Through in Grid Integrated Hybrid System Using FACTS Device and Electric Vehicle Charging Station


Abstract
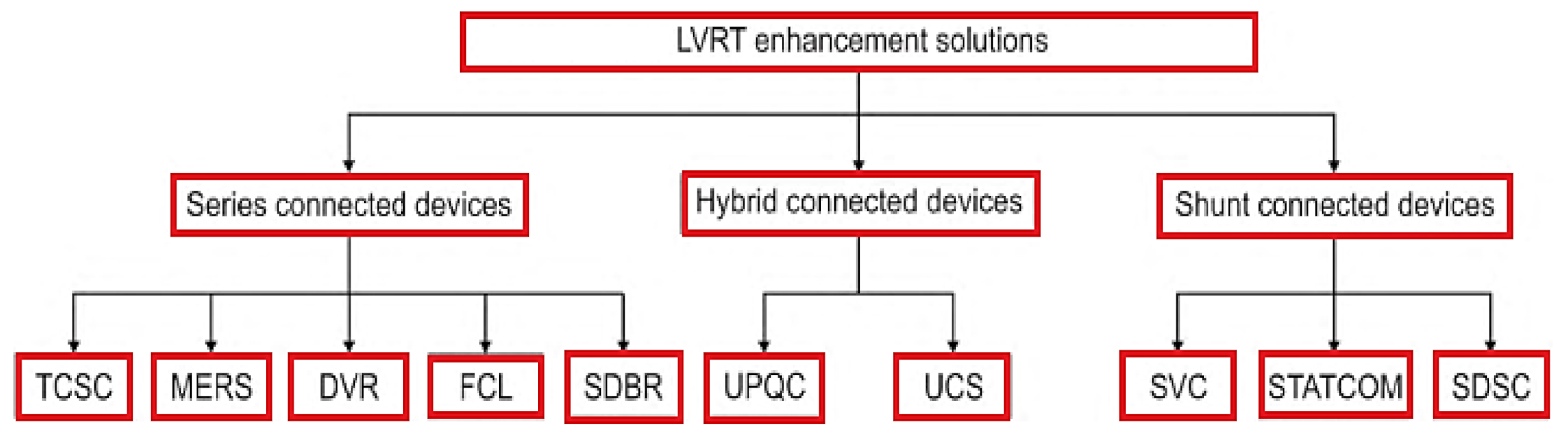
:1. Introduction
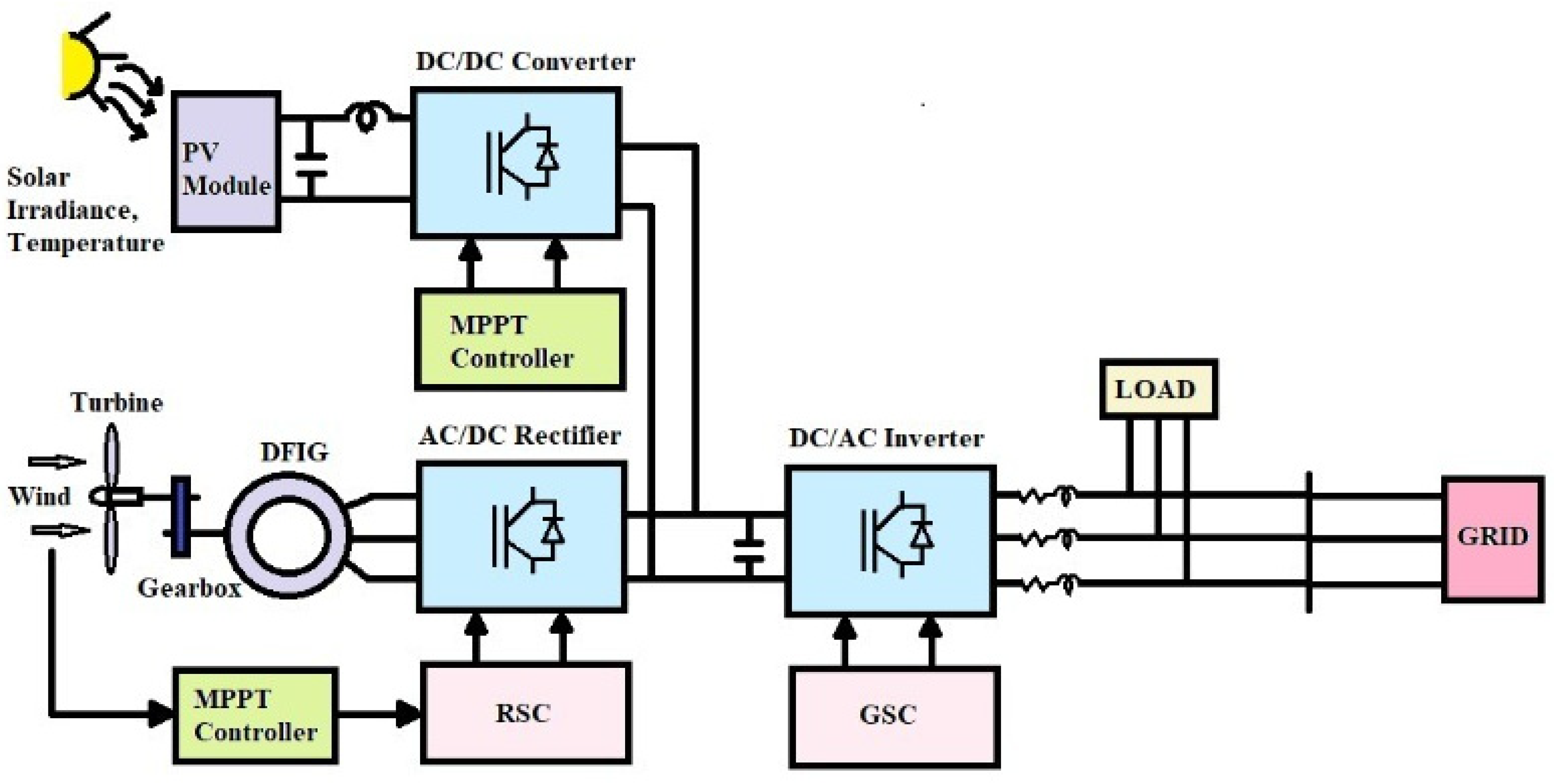
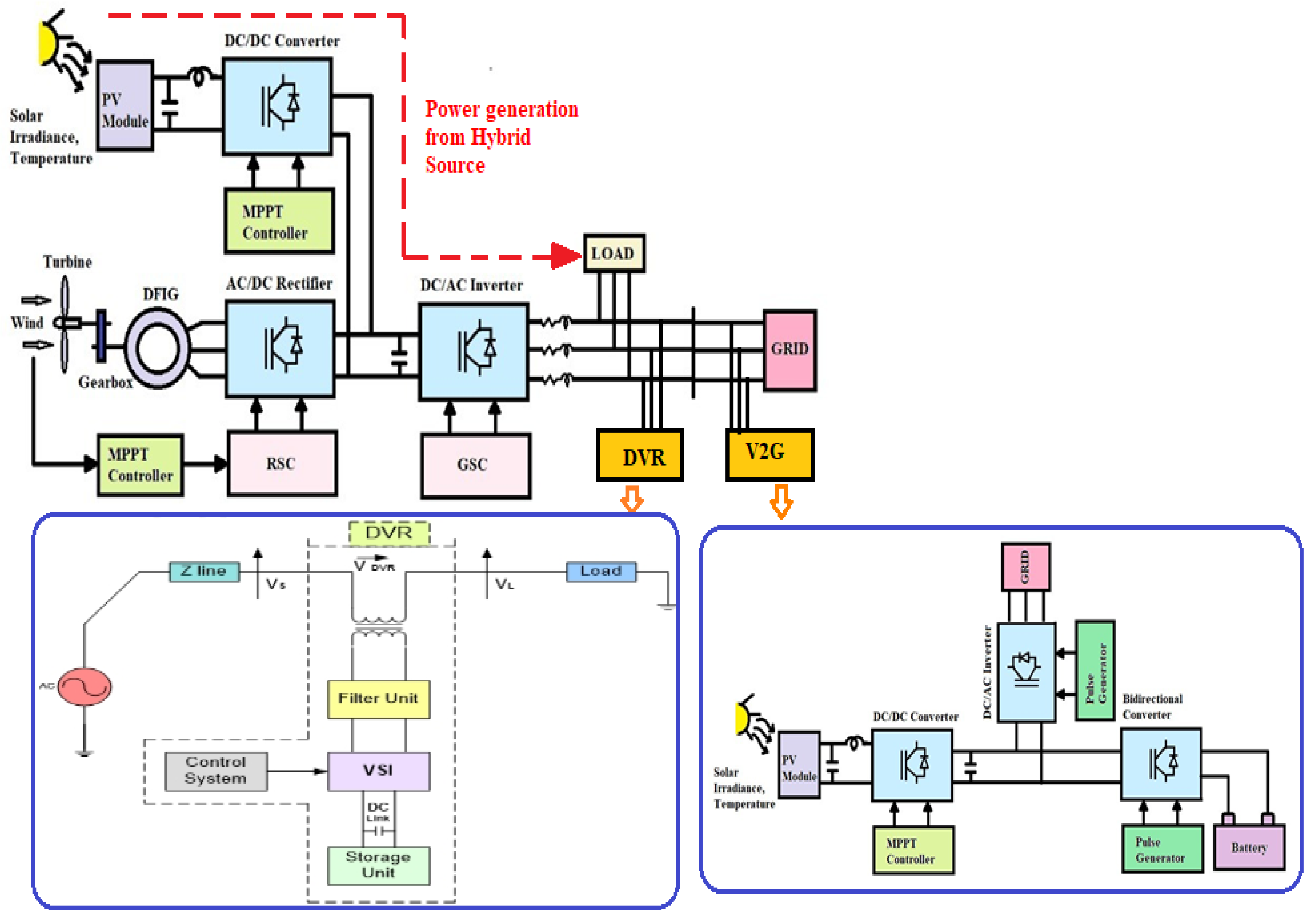
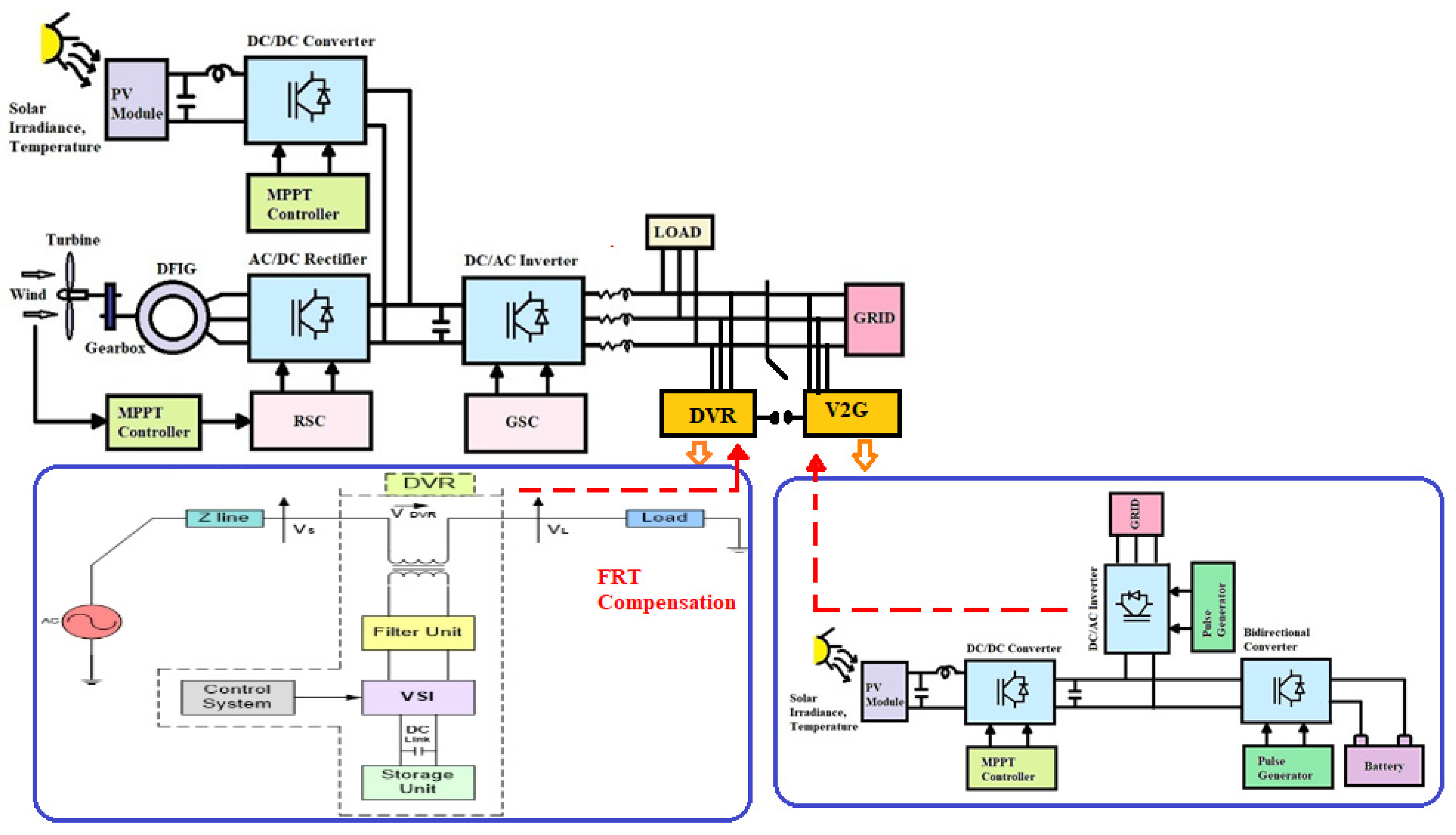
2. Hybrid System
2.1. Modeling of Hybrid Energy System
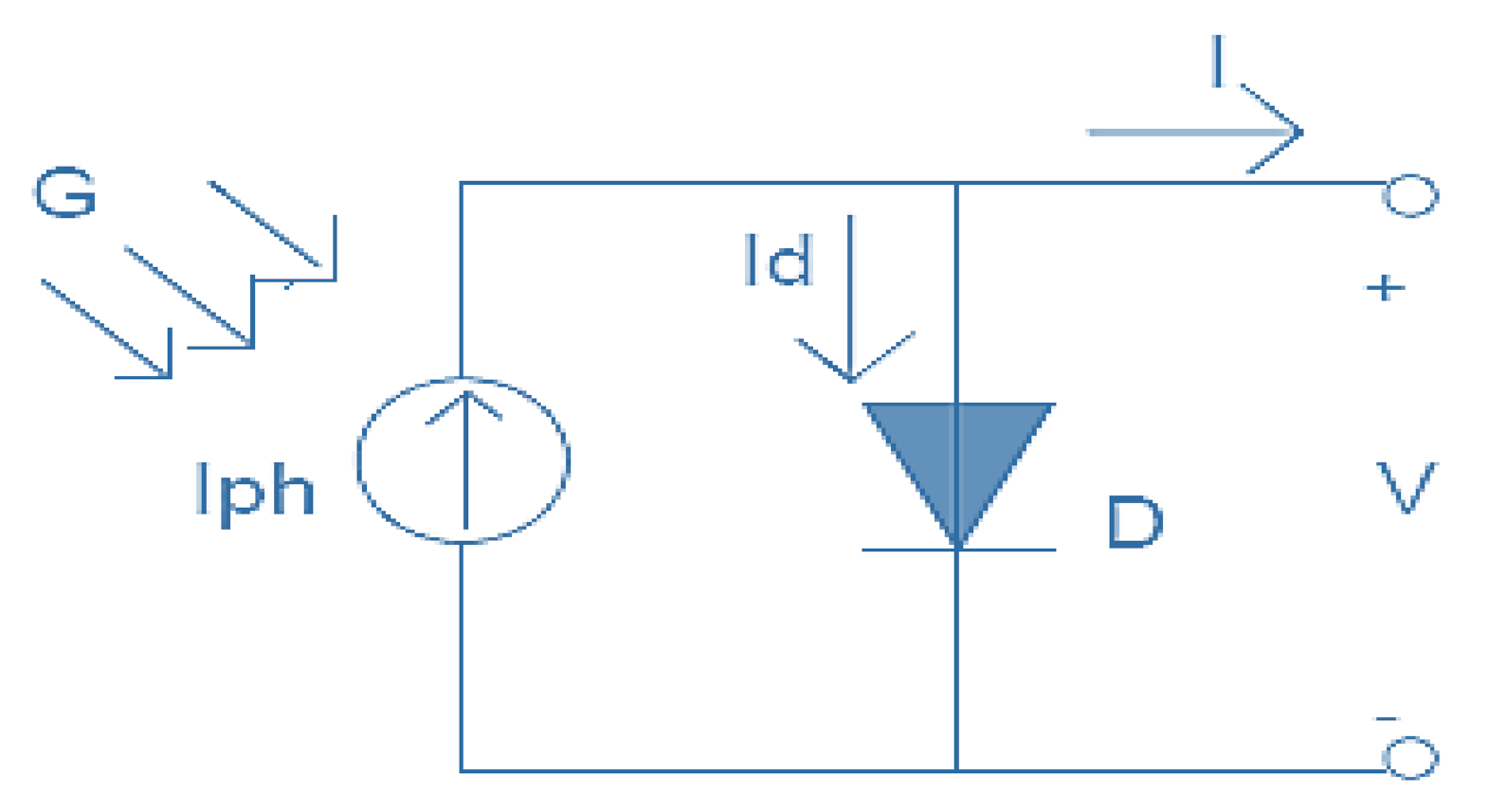
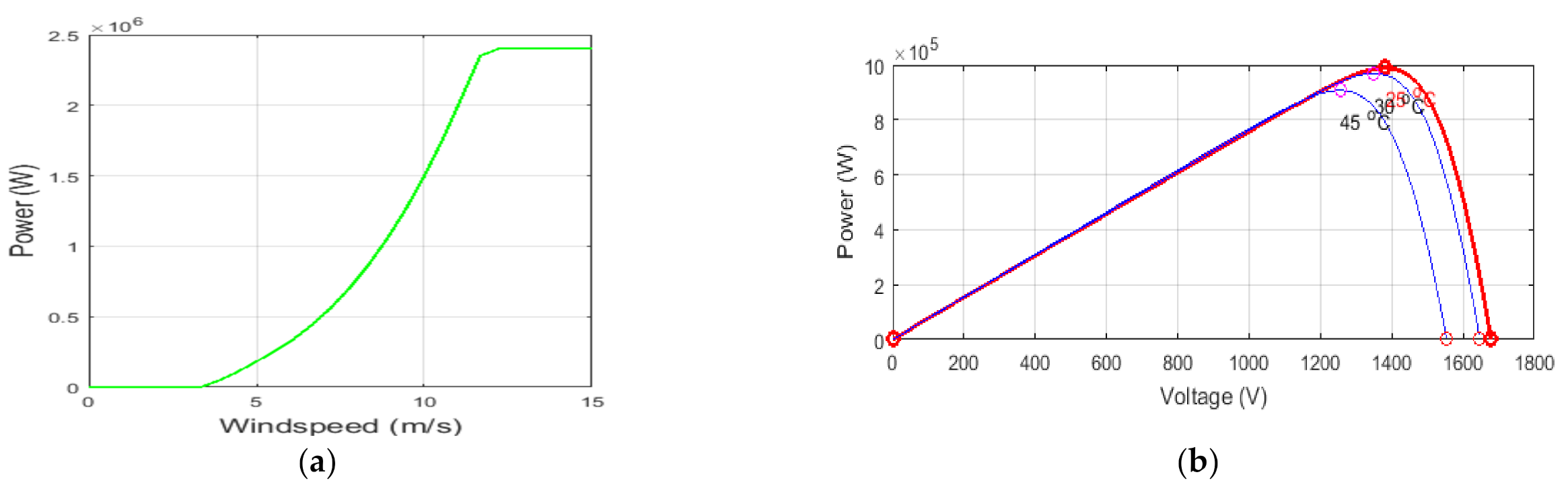
2.1.1. PV Modeling
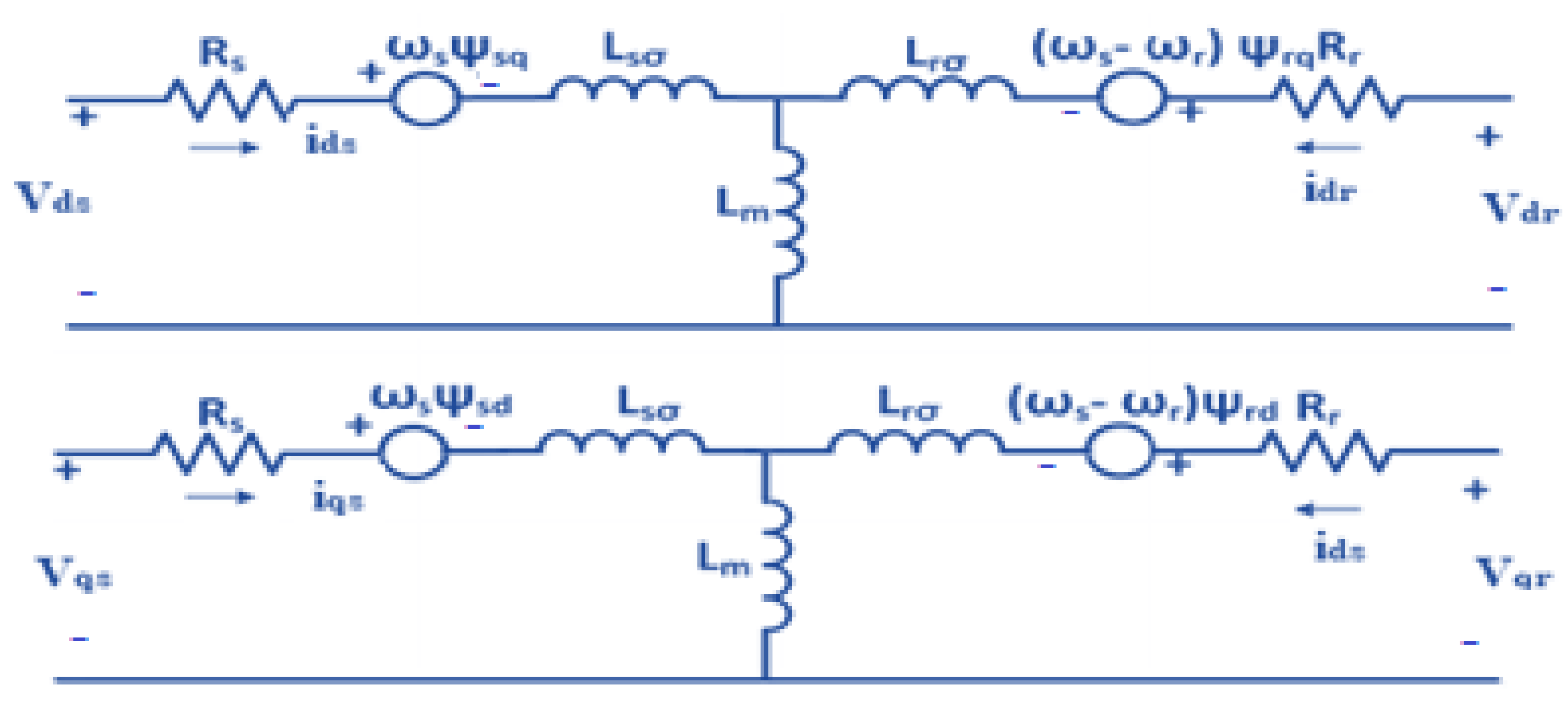
2.1.2. Modeling of DFIG
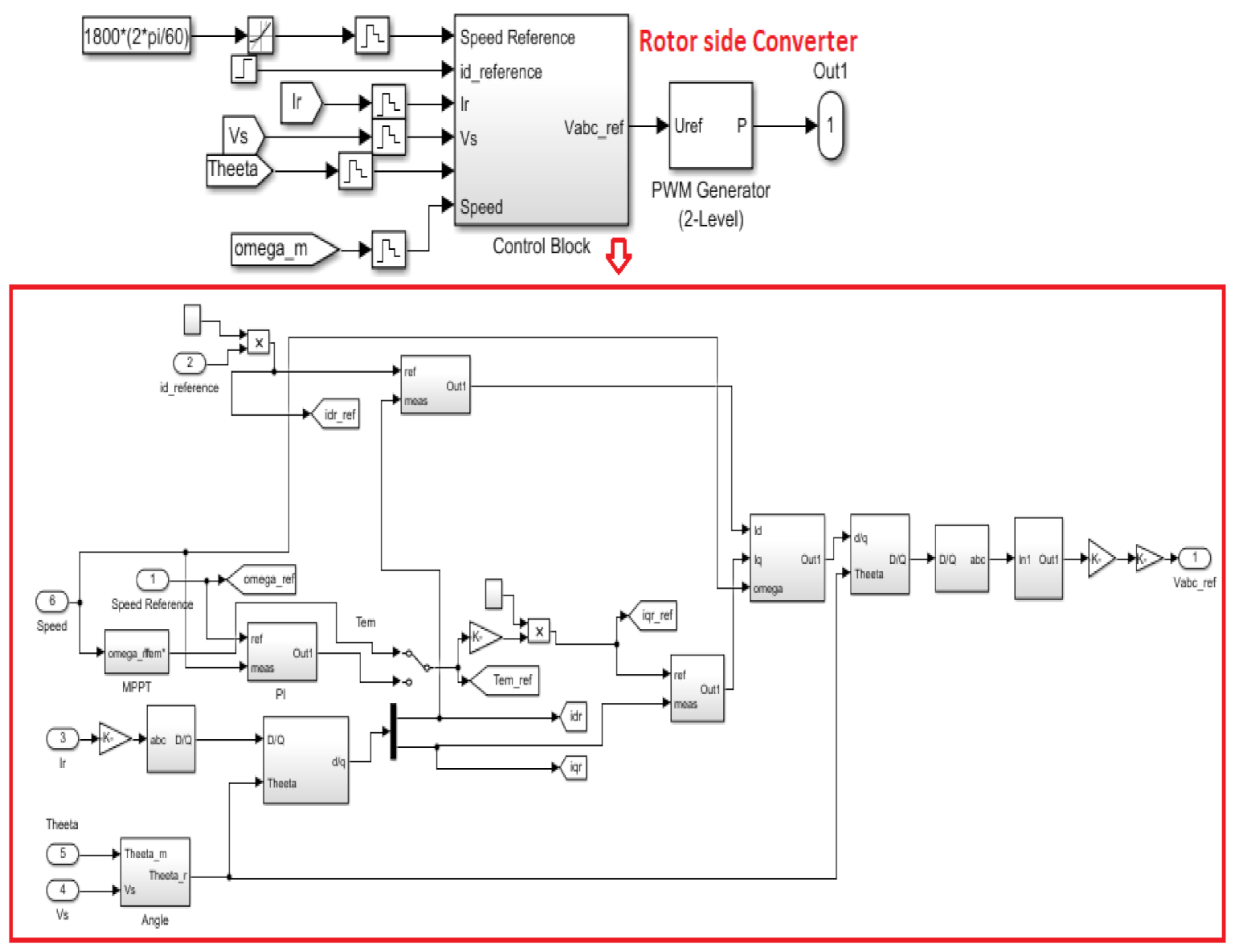
2.2. Rotor Side Converter
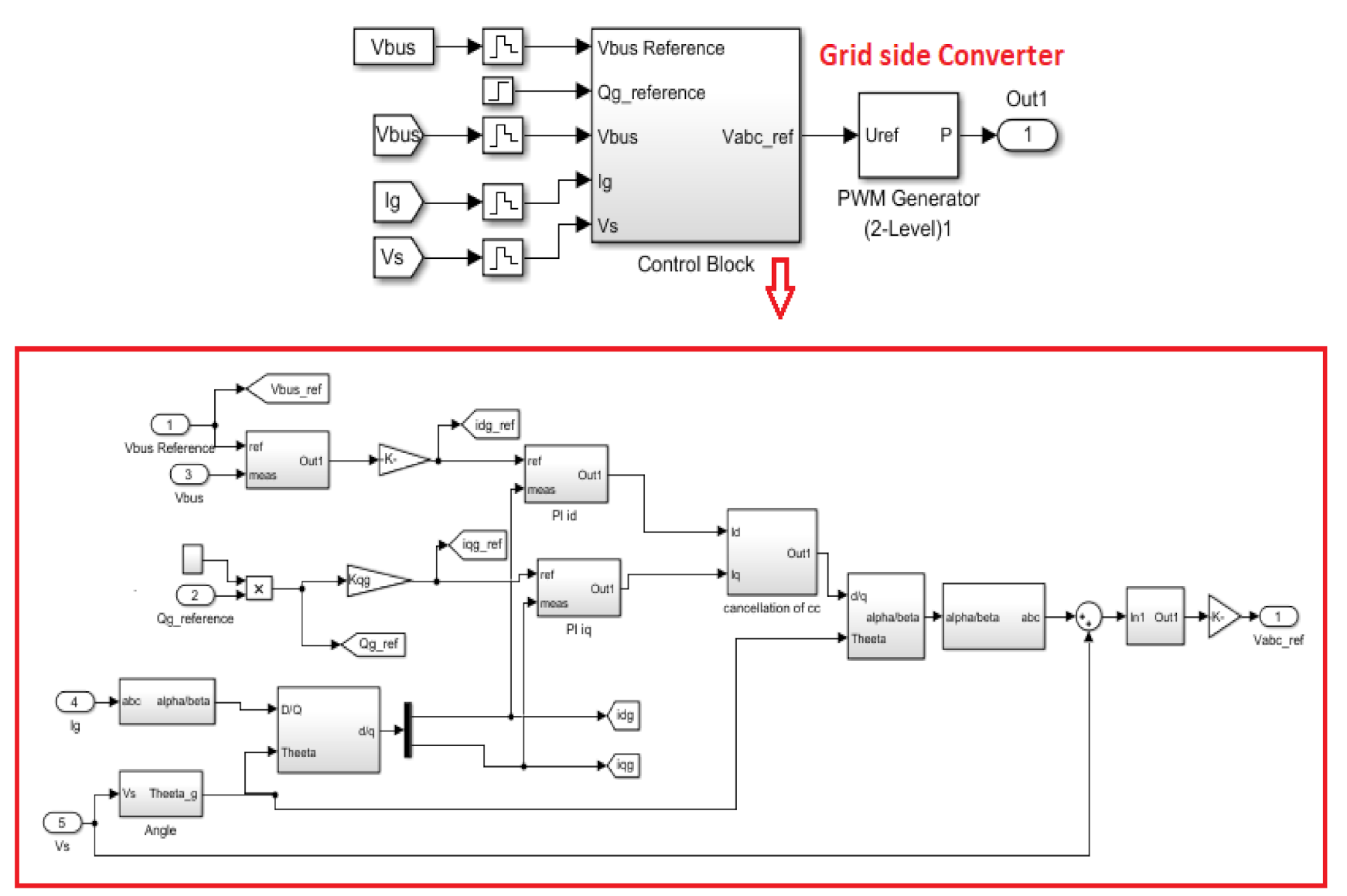
2.3. Grid Side Converter
3. Vehicle to Grid System
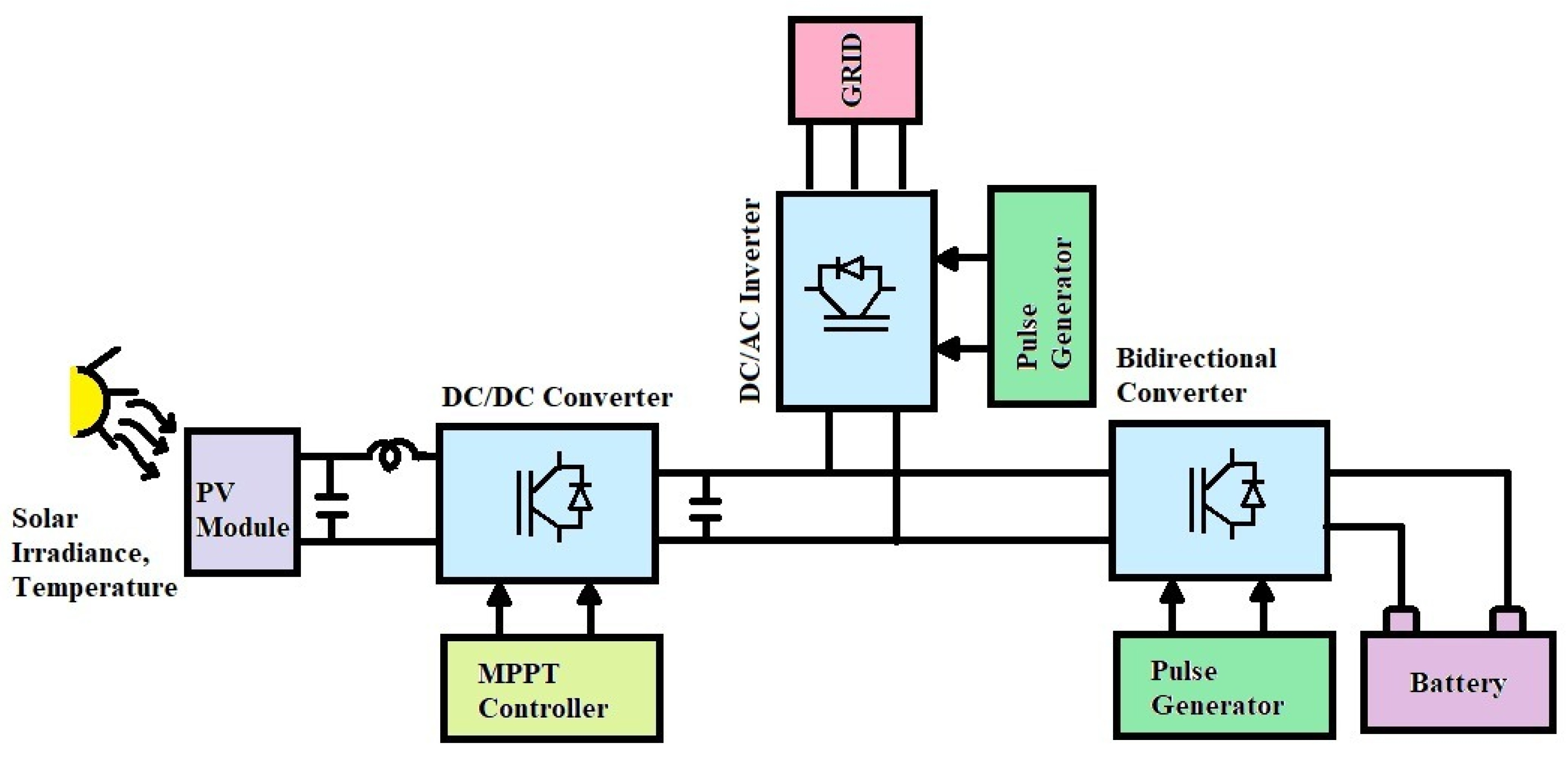
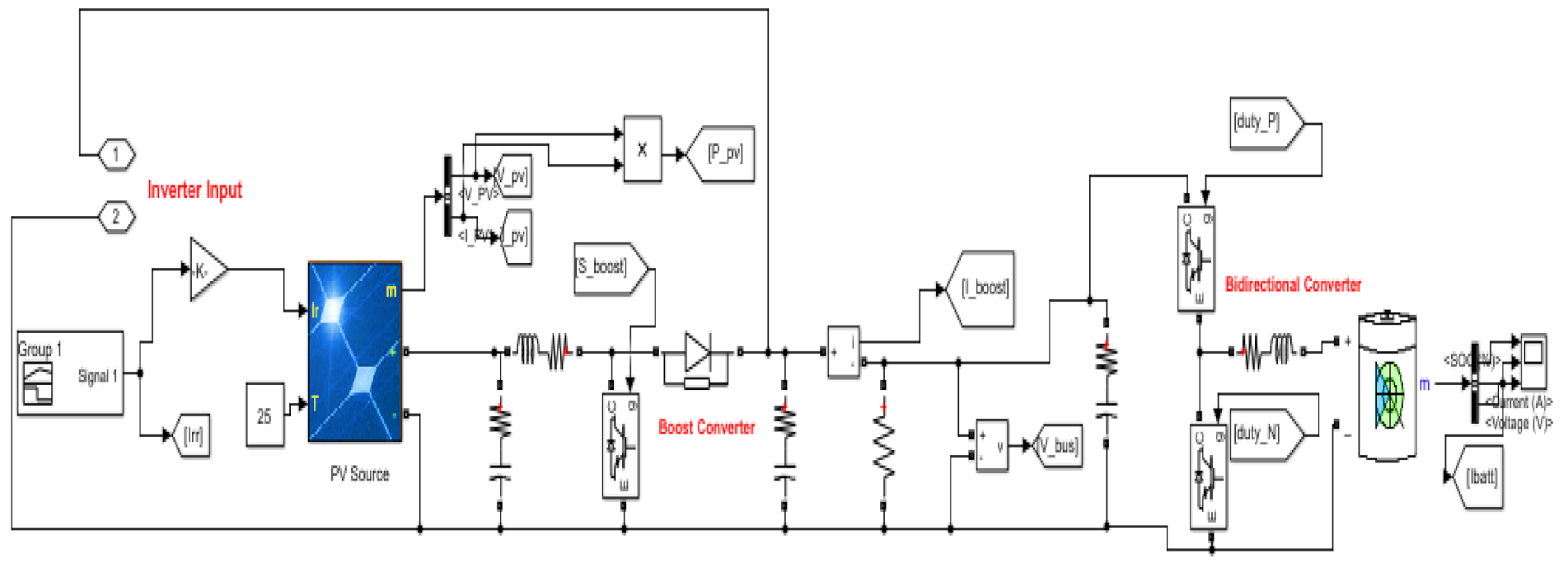
3.1. EV Charging Station Structure
- = Reference voltage for PWM controller for charging condition
- = Reference voltage
- = DC–DC converter voltage
- = Reference current
- = Battery current
- = Proportional constant of the PI controller
- = Integral constant of the PI controller

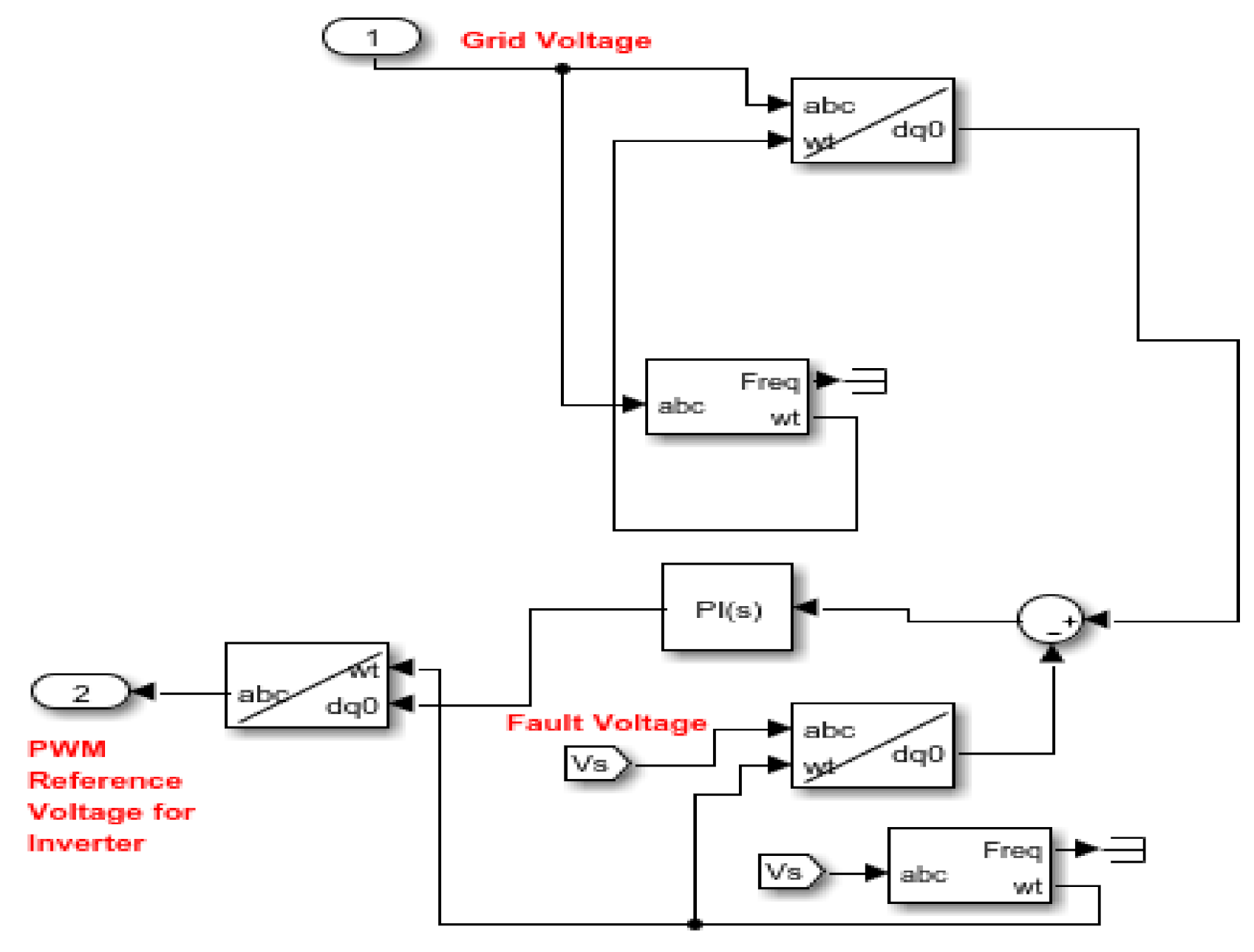
3.2. Voltage Tracking Unit
4. Modeling of DVR
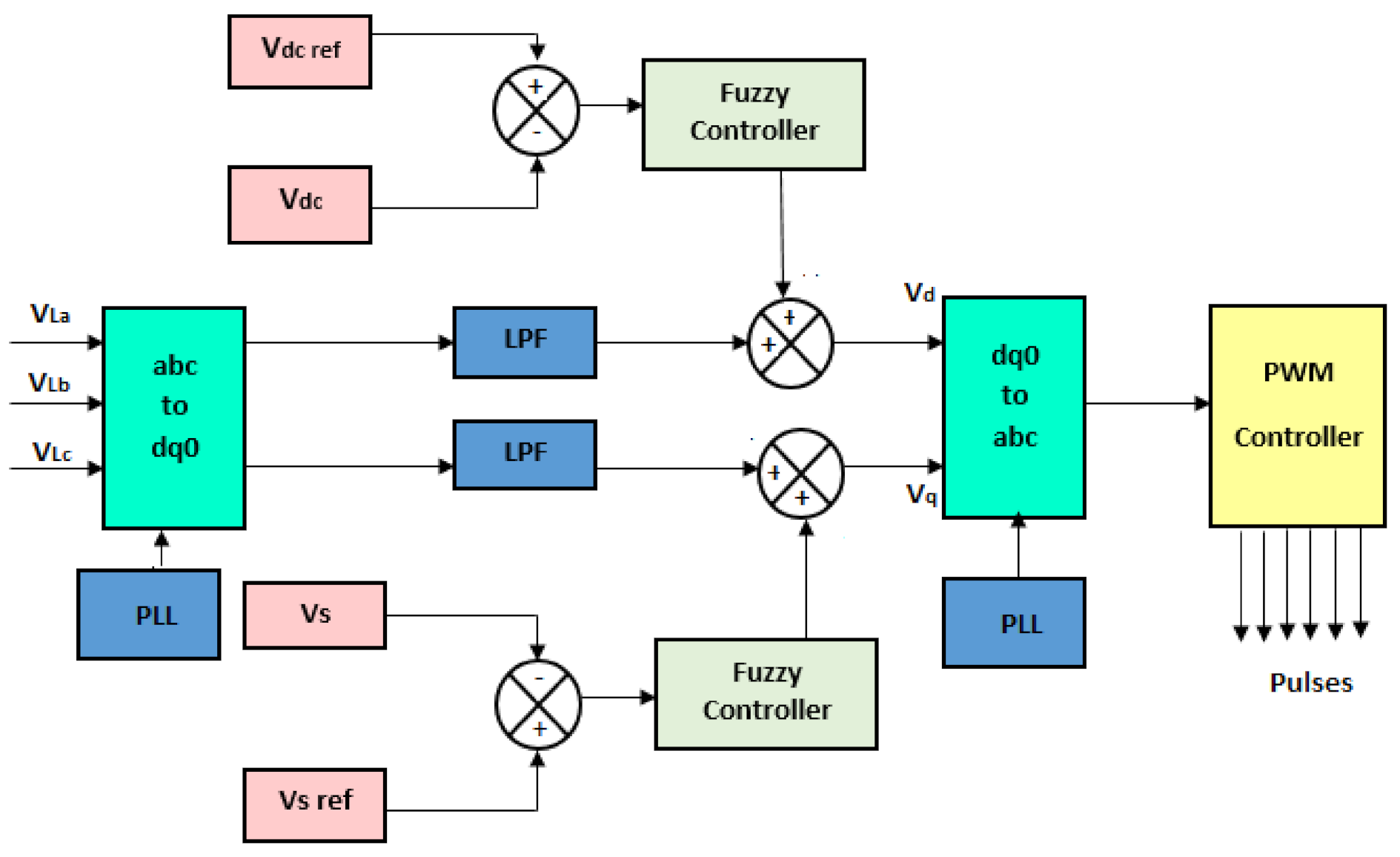
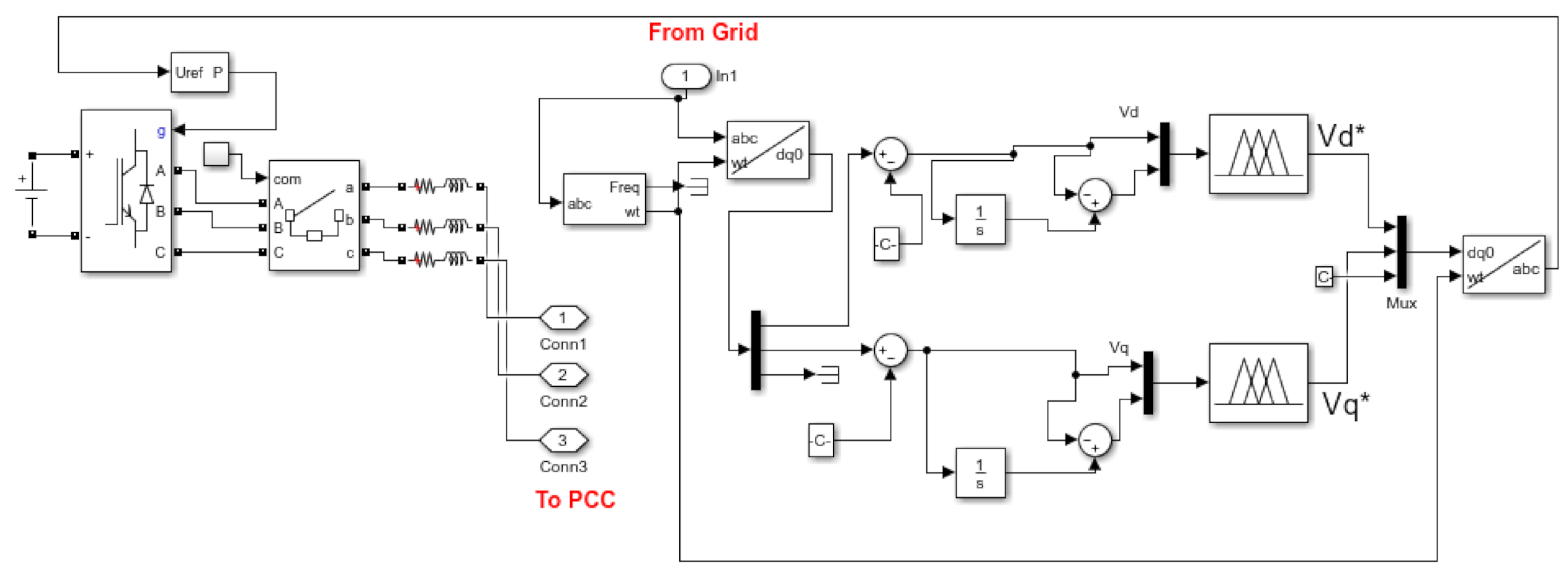
4.1. DVR Control Strategy
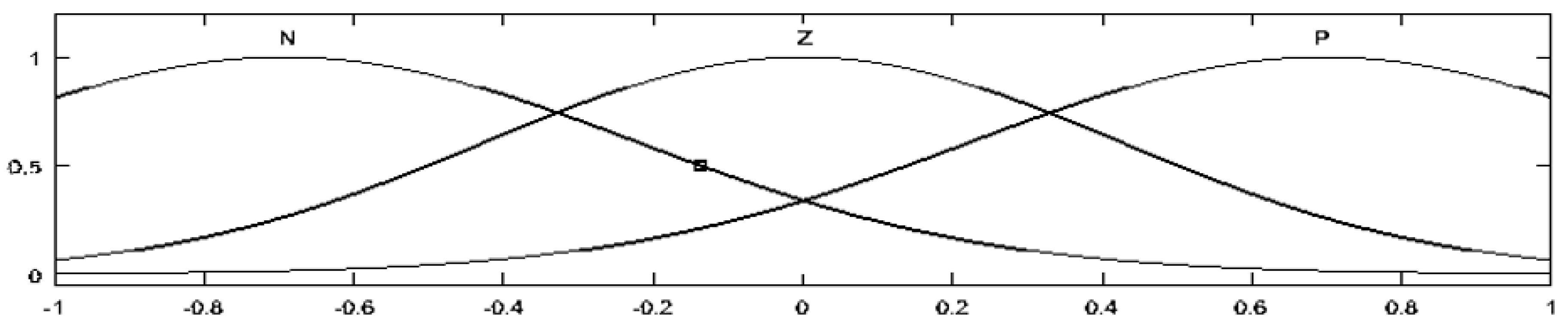
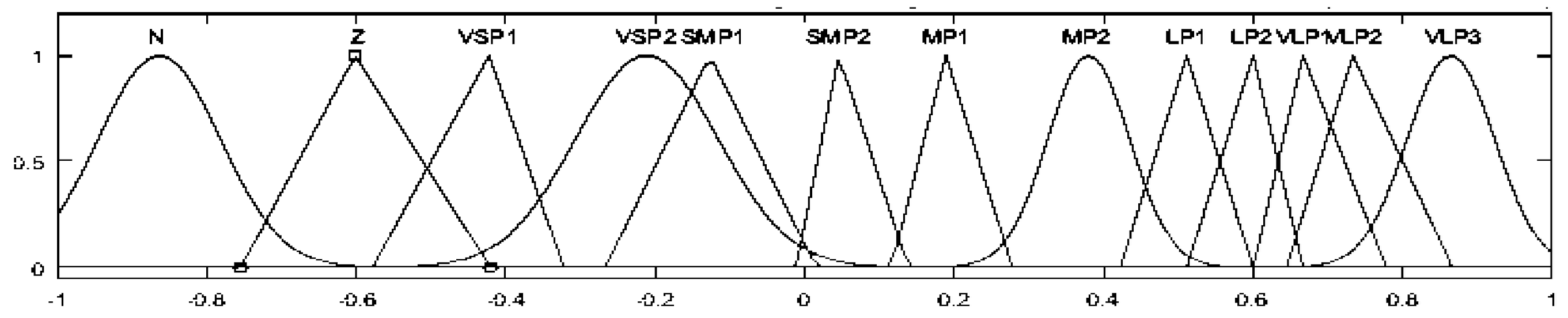
4.2. Fuzzy Logic Controller
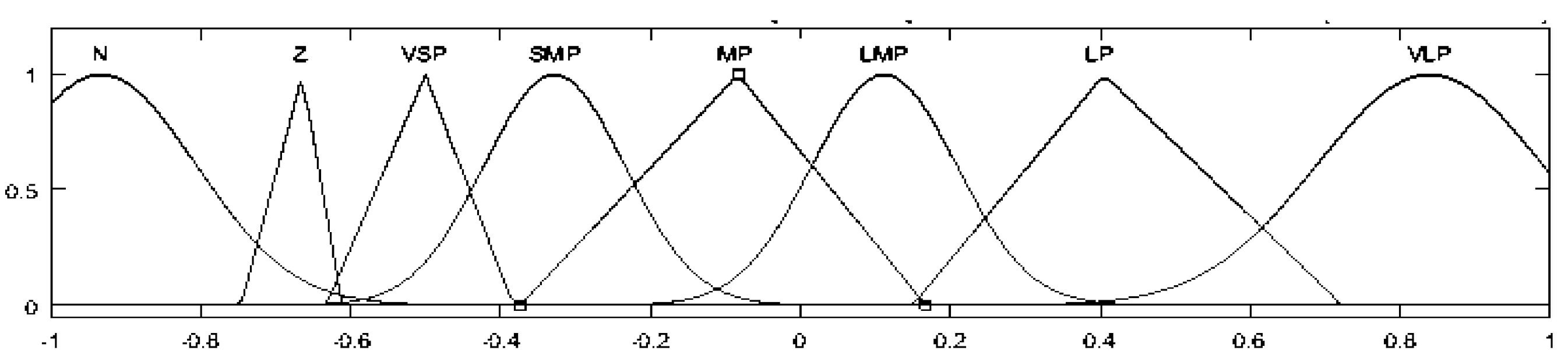
Membership Functions
5. Modes of Operation
5.1. Normal Mode
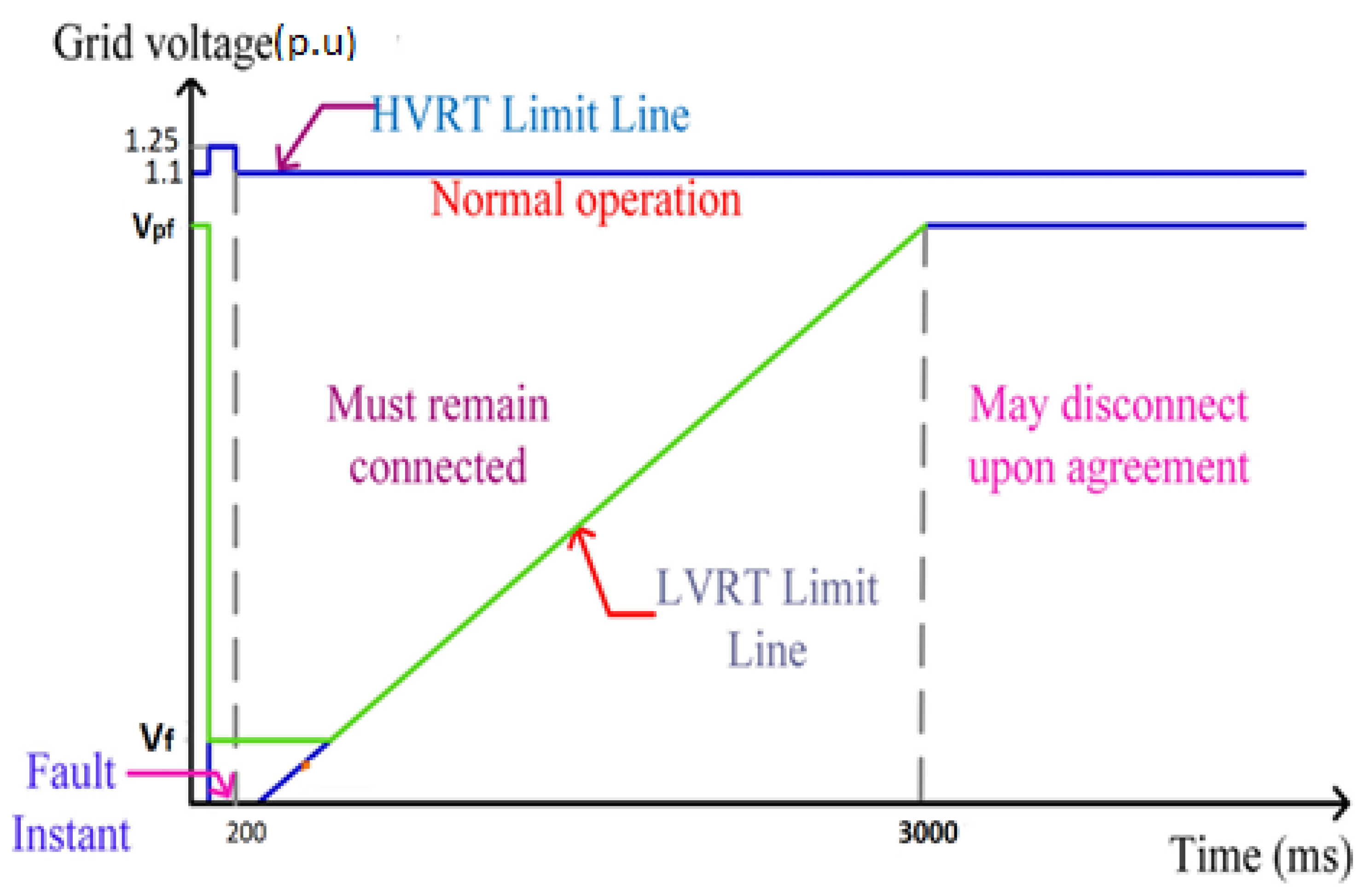
5.2. Fault Ride through Mode
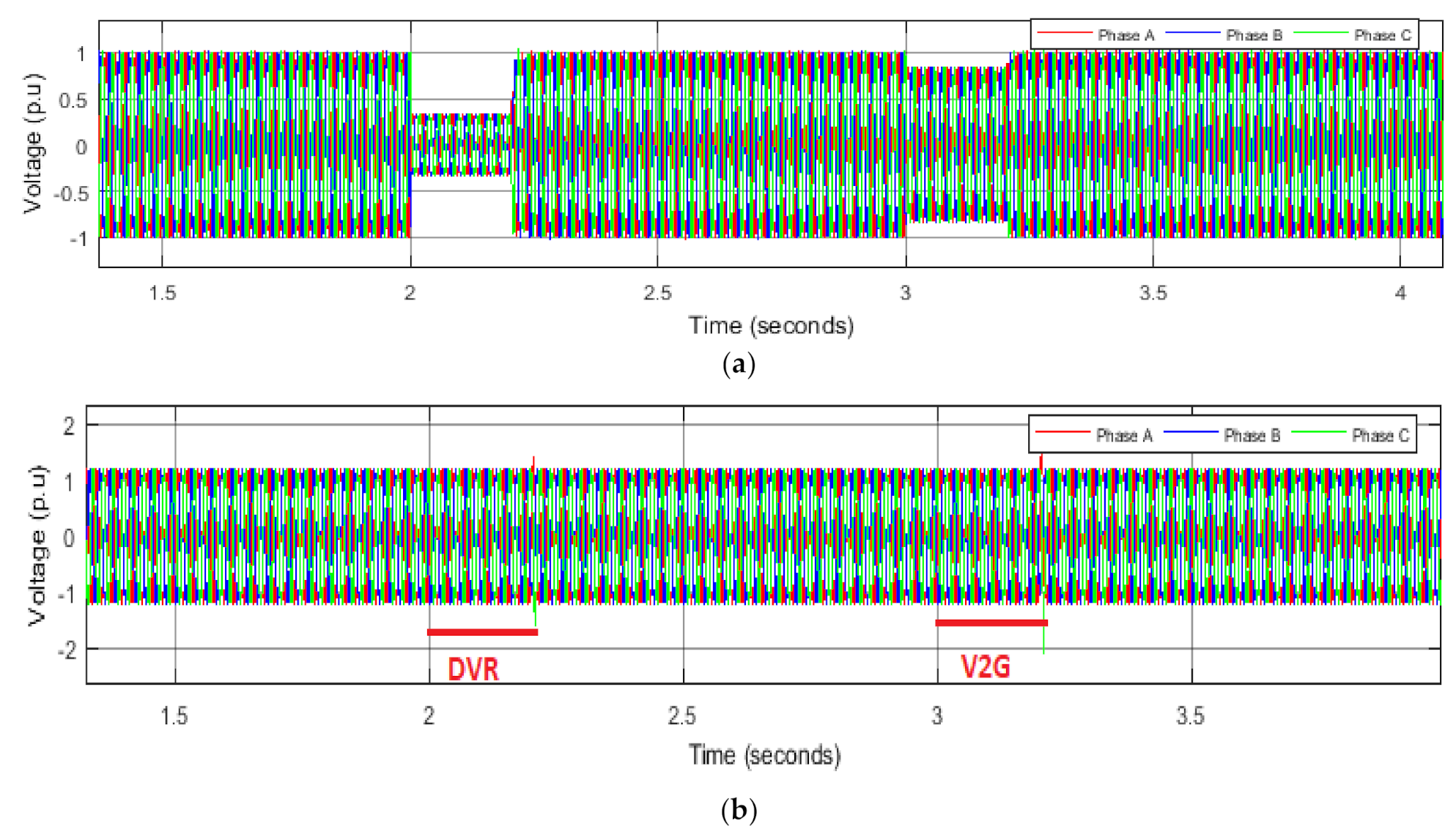
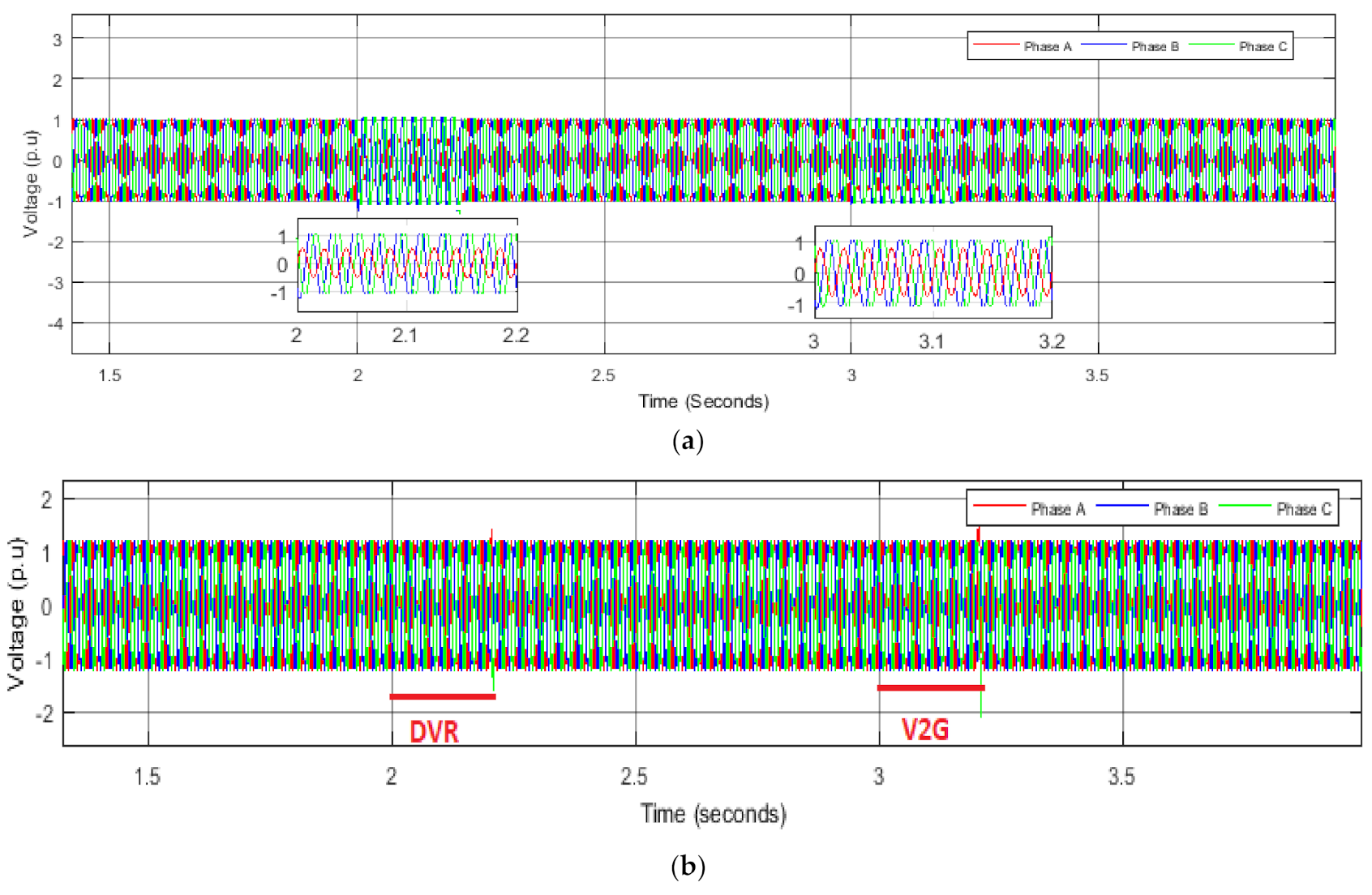
6. Discussion of Simulation Results
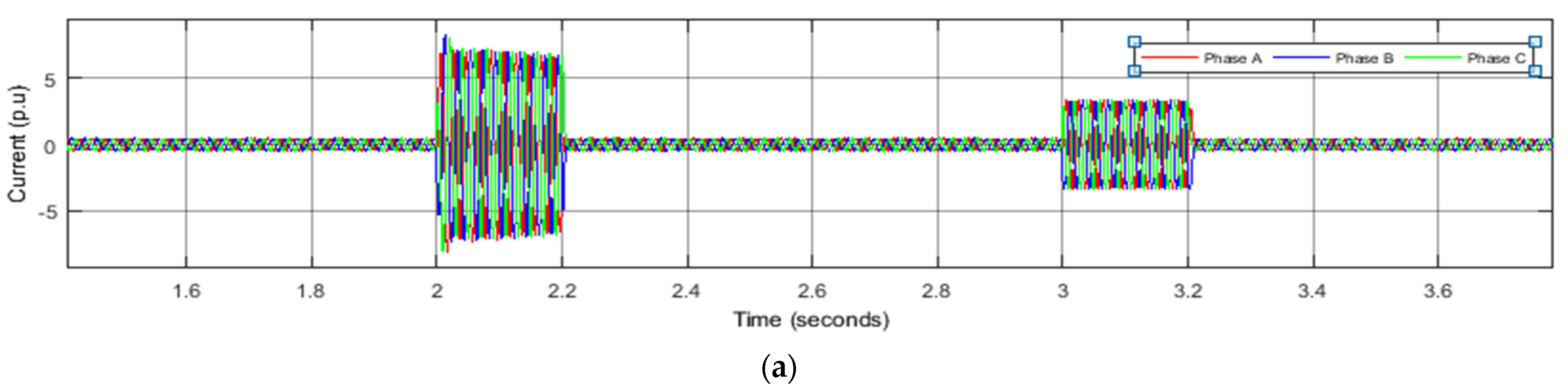
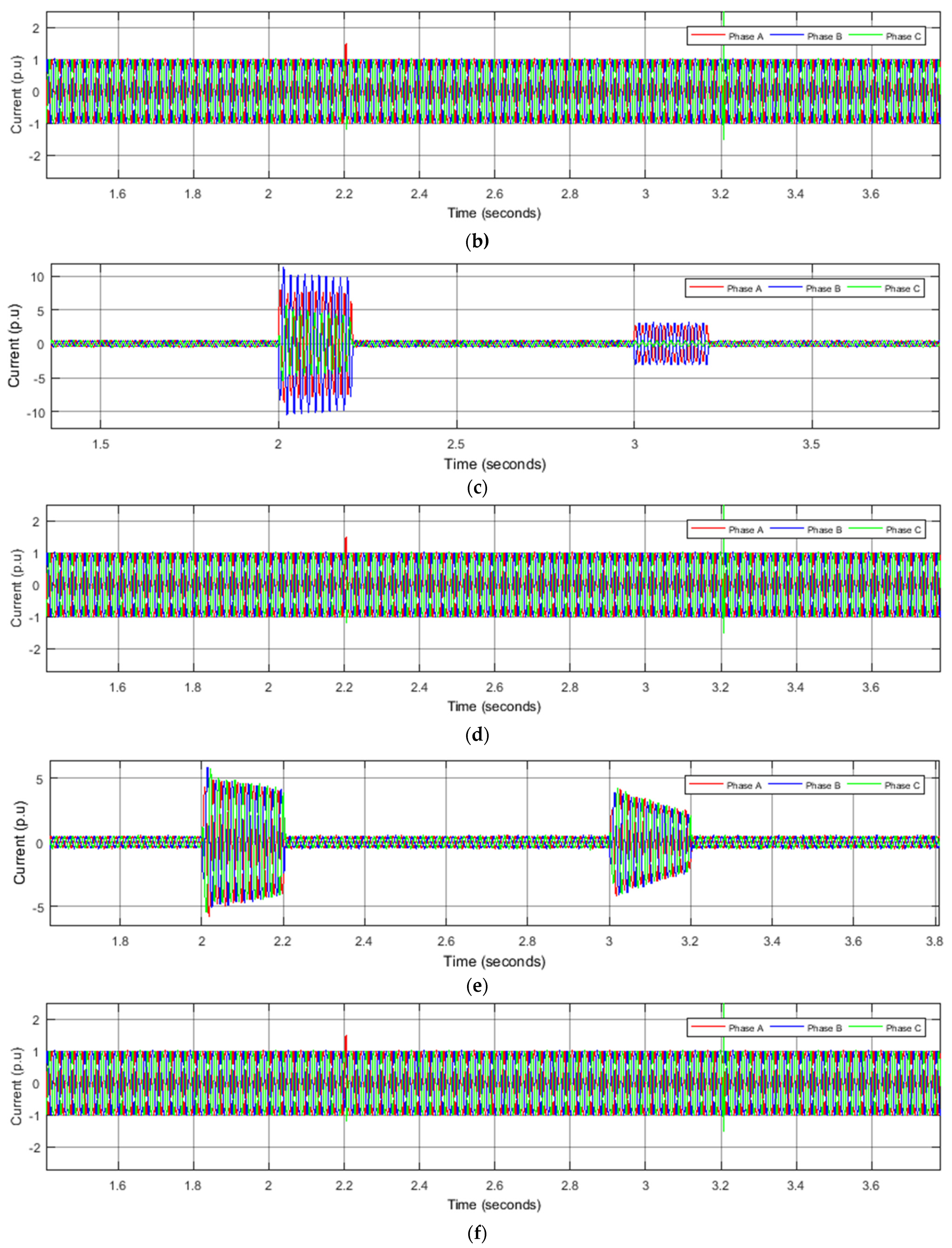
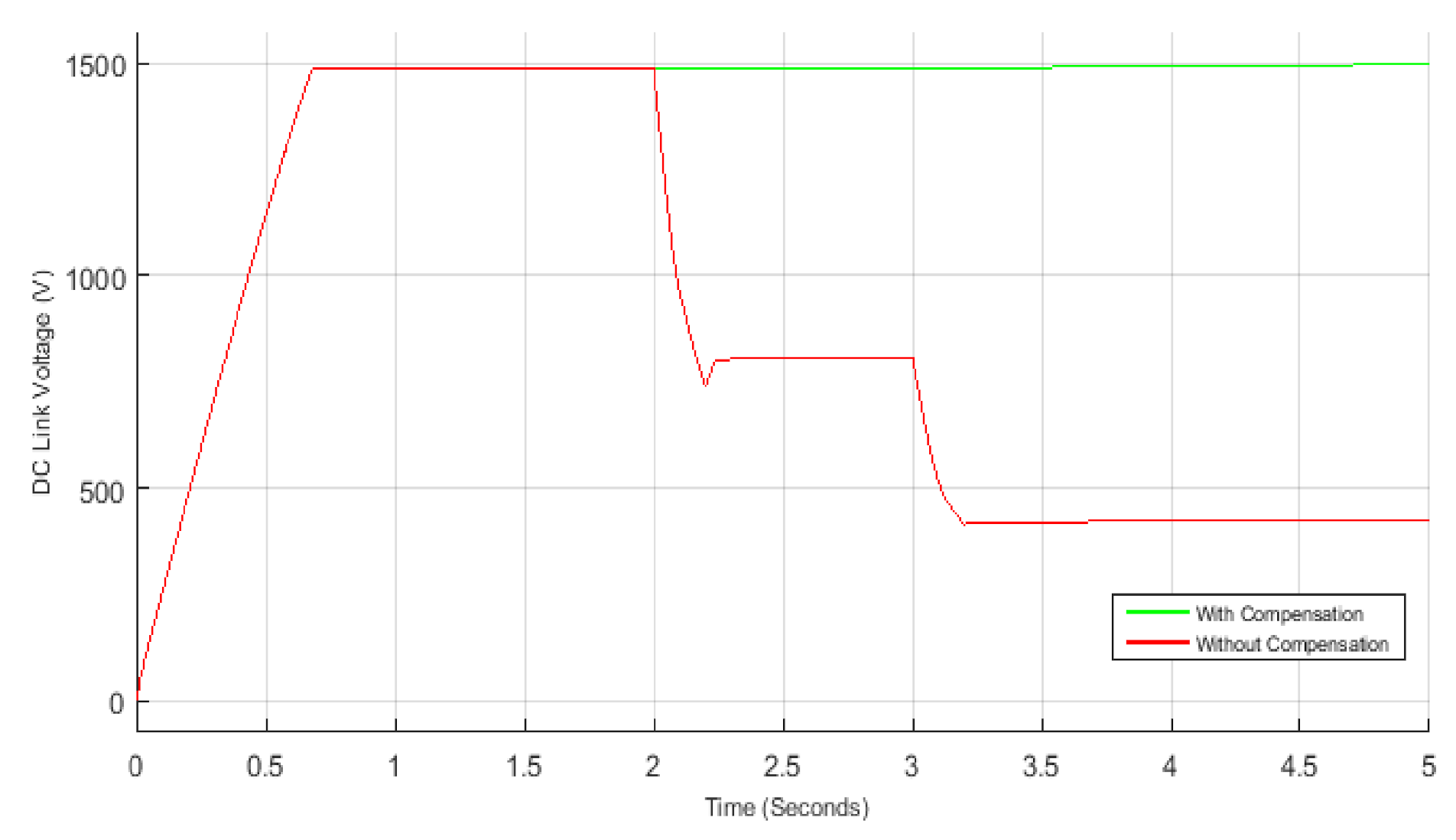
6.1. Low Voltage Ride Through
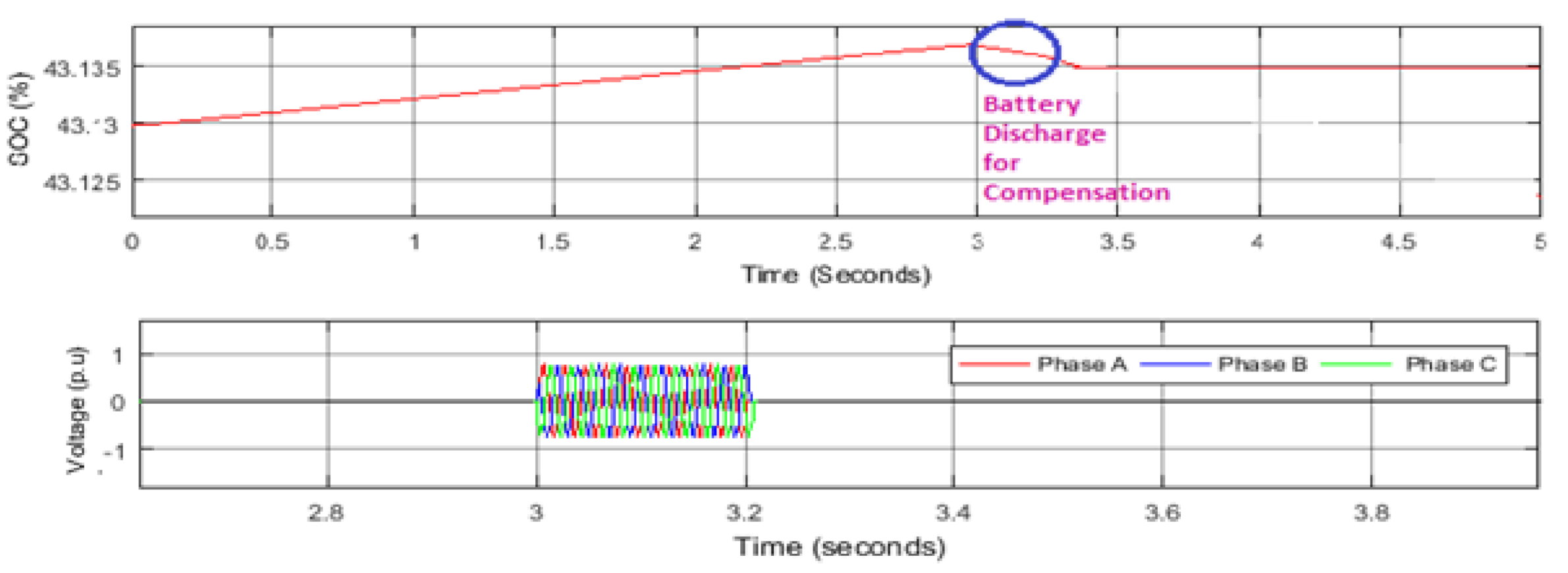
6.2. EV Battery Charging and Discharging
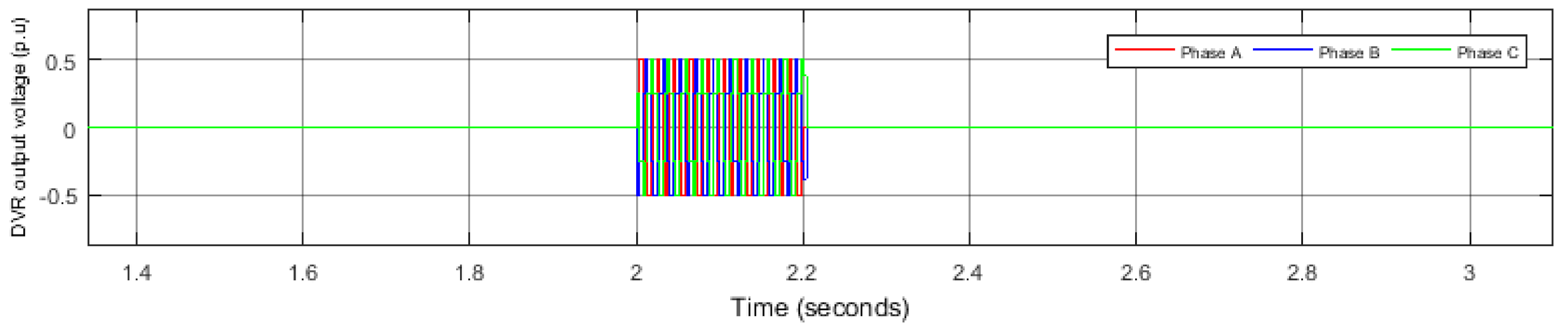
6.3. DVR Output Voltage
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Morshed, M.J.; Fekih, A. A novel fault ride through scheme for hybrid wind/pv power generation systems. IEEE Trans. Sustain. Energy 2019, 11, 2427–2436. [Google Scholar] [CrossRef]
- Saeed, M.A.; Khan, H.M.; Qureshi, S.A. Analyzing effectiveness of LVRT techniques for DFIG wind turbine system and implementation of hybrid combination with control schemes. Renew. Sustain. Energy Rev. 2017, 81, 2487–2501. [Google Scholar] [CrossRef]
- Moghadasi, A.; Sarwat, A.; Guerrero, J.M. A comprehensive review of low-voltage-ride-through methods for fixed-speed wind power generators. Renew. Sustain. Energy Rev. 2016, 55, 823–839. [Google Scholar] [CrossRef] [Green Version]
- Dösoglu, M.K.; Arsoy, A.B.; Güvenç, U. Application of STATCOM-supercapacitor for low-voltage ride-through capability in DFIG-based wind farm. Neural Comput. Appl. 2017, 28, 2665–2674. [Google Scholar] [CrossRef]
- Dösoglu, M.K.; Arsoy, A.B. Transient modelling and analysis of a DFIG based wind farm with supercapacitor energy storage. Int. J. Electr. Power Energy Syst. 2016, 78, 414–421. [Google Scholar] [CrossRef]
- Mahela, O.P.; Gupta, N.; Khosravy, M.; Patel, N. Comprehensive Overview of Low Voltage Ride Through Methods of Grid Integrated Wind Generator. IEEE Access 2019, 7, 99299–99326. [Google Scholar] [CrossRef]
- Hiremath, R.; Moger, T. Comprehensive review on low voltage ride through capability of wind turbine generators. Int. Trans. Electr. Energy Syst. 2020, 30, e12524. [Google Scholar] [CrossRef]
- Hu, S.; Lin, X.; Kang, Y.; Zou, X. An improved low-voltage ride through control strategy of doubly fed induction generator during grid faults. IEEE Trans. Power Electron. 2011, 26, 3653–3665. [Google Scholar] [CrossRef]
- Sivasankar, G.; Kumar, V.S. Improving stability of utility-tied wind generators using dynamic voltage restorer. J. Energy S. Afr. 2014, 25, 71–79. [Google Scholar] [CrossRef] [Green Version]
- Hassanein, W.S.; Ahmed, M.M.; El-Raouf, M.O.A.; Ashmawy, M.G.; Mosaad, M.I. Performance improvement of off-grid hybrid renewable energy system using dynamic voltage restorer. Alex. Eng. J. 2020, 53, 1567–1581. [Google Scholar] [CrossRef]
- Xiao, S.; Yang, G.; Zhou, H.; Geng, H. An LVRT control strategy based on flux linkage tracking for DFIG-based Wind Energy Conversion System. IEEE Trans. Ind. Electron. 2013, 60, 2820–2832. [Google Scholar] [CrossRef]
- Molla, E.M.; Kuo, C. Voltage Quality Enhancement of Grid-Integrated PV System Using Battery-Based Dynamic Voltage Restorer. Energies 2020, 13, 5742. [Google Scholar] [CrossRef]
- Amalorpavaraj, R.A.J.; Kaliannan, P.; Padmanaban, S.; Subramaniam, U.; Ramachandaramurthy, V.K. Improved Fault Ride Through Capability in DFIG Based Wind Turbines Using Dynamic Voltage Restorer with Combined Feed-Forward and Feed-Back Control. IEEE Access 2017, 5, 20494–20503. [Google Scholar] [CrossRef]
- Shaaban, F.; Eajal, A.A.; El-Saadany, E.F. Coordinated charging of plug-in hybrid electric vehicles in smart hybrid AC/DC distribution systems. Renew. Energy 2015, 82, 92–99. [Google Scholar] [CrossRef]
- Ota, Y.; Taniguchi, H.; Nakajima, T.; Liyanage, K.M.; Baba, J.; Yokoyama, A. Autonomous Distributed V2G (Vehicle-to-Grid) Satisfying Scheduled Charging. IEEE Trans. Smart Grid 2012, 3, 559–564. [Google Scholar] [CrossRef]
- Brenna, M.; Foiadelli, F.; Leone, C.; Longo, M. Electric Vehicles charging Technology Review and Optimal Size Estimation. J. Electr. Eng. Technol. 2020, 15, 2539–2552. [Google Scholar] [CrossRef]
- Mehrjerdi, H.; Hemmati, R. Stochastic model for electric vehicle charging station integrated with wind energy. Sustain. Energy Technol. Assess. 2020, 37, 100577. [Google Scholar] [CrossRef]
- Mohammad, A.; Zamora, R.; Lie, T.T. Integration of Electric Vehicles in the Distribution Network: A Review of PV Based Electric Vehicle Modelling. Energies 2020, 13, 4541. [Google Scholar] [CrossRef]
- Chellaswamy, C.; Balaji, L.; Kaliraja, T. Renewable energy based automatic recharging mechanism for full electric vehicle. Eng. Sci. Technol. Int. J. 2019, 23, 555–564. [Google Scholar] [CrossRef]
- Verma, D.; Nema, S.; Shandilya, A.M. A Different Approach to Design Non-Isolated DC–DC Converters for Maximum Power Point Tracking in Solar Photovoltaic Systems. J. Circuits Syst. Comput. 2016, 25, 1630004. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| V | N | Z | VSP | SMP | MP | LMP | LP | VLP | |
|---|---|---|---|---|---|---|---|---|---|
| ∆V | |||||||||
| N | N | Z | VSP1 | SMP1 | MP1 | LP1 | VLP1 | VLP3 | |
| Z | N | Z | VSP1 | SMP1 | MP1 | LP1 | VLP1 | VLP3 | |
| P | N | Z | VSP2 | SMP2 | MP2 | LP2 | VLP2 | VL3 | |
| DFIG Characteristics | Value |
|---|---|
| Power | 2.5 MW |
| Stator Voltage | 690 V |
| Stator Current | 1760 A |
| Frequency | 50 Hz |
| Stator connection | Star |
| Rotor Connection | Star |
| Poles | 2 |
| Rs | 2.6 × e-3 Ω |
| Ls | 0.087 × e-3 H |
| Lm | 2.5 × e-3 H |
| Rr | 2.9 × e-3 Ω |
| PV Parameters | Value |
|---|---|
| Power | 1 MW |
| Voc | 37.3 V |
| Isc | 8.66 A |
| Vmp | 30.7 V |
| Imp | 8.15 A |
| Cells per module | 60 |
| Parallel Strings | 88 |
| Series strings | 45 |
| Parameters | Value |
|---|---|
| DC–DC Converter | |
| L | 5 mH |
| C | 100 µF |
| Bidirectional Converter | |
| L | 0.5 mH |
| C | 1 mF |
| DVR Parameters | Value |
|---|---|
| Power | 2.5 MVA |
| L | 0.1 mH |
| C | 1 μF |
| Switching Frequency | 1000 Hz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
R., U.; D., S. Fault Ride Through in Grid Integrated Hybrid System Using FACTS Device and Electric Vehicle Charging Station. Energies 2021, 14, 3828. https://doi.org/10.3390/en14133828
R. U, D. S. Fault Ride Through in Grid Integrated Hybrid System Using FACTS Device and Electric Vehicle Charging Station. Energies. 2021; 14(13):3828. https://doi.org/10.3390/en14133828
Chicago/Turabian StyleR., Uthra, and Suchitra D. 2021. "Fault Ride Through in Grid Integrated Hybrid System Using FACTS Device and Electric Vehicle Charging Station" Energies 14, no. 13: 3828. https://doi.org/10.3390/en14133828
APA StyleR., U., & D., S. (2021). Fault Ride Through in Grid Integrated Hybrid System Using FACTS Device and Electric Vehicle Charging Station. Energies, 14(13), 3828. https://doi.org/10.3390/en14133828