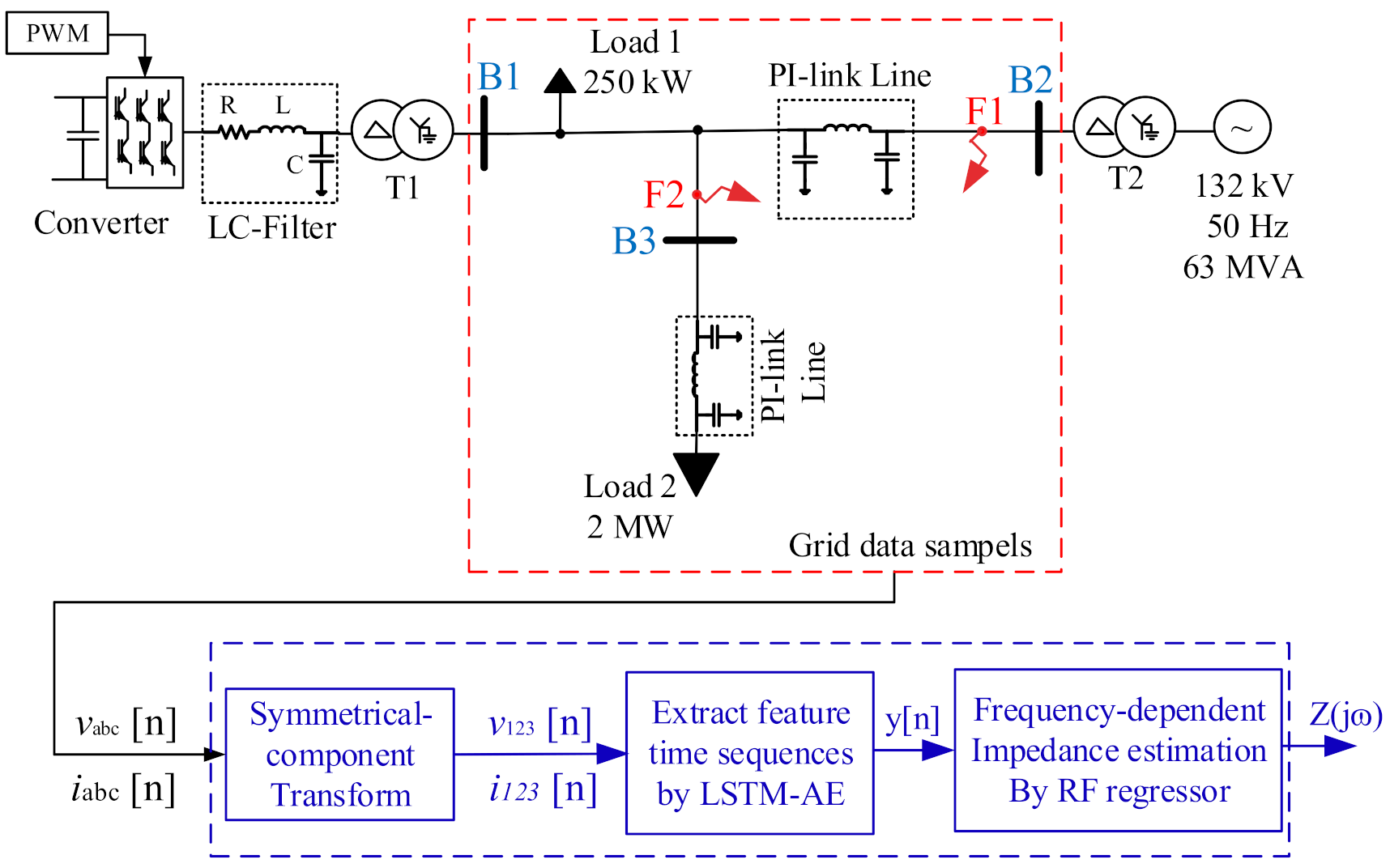
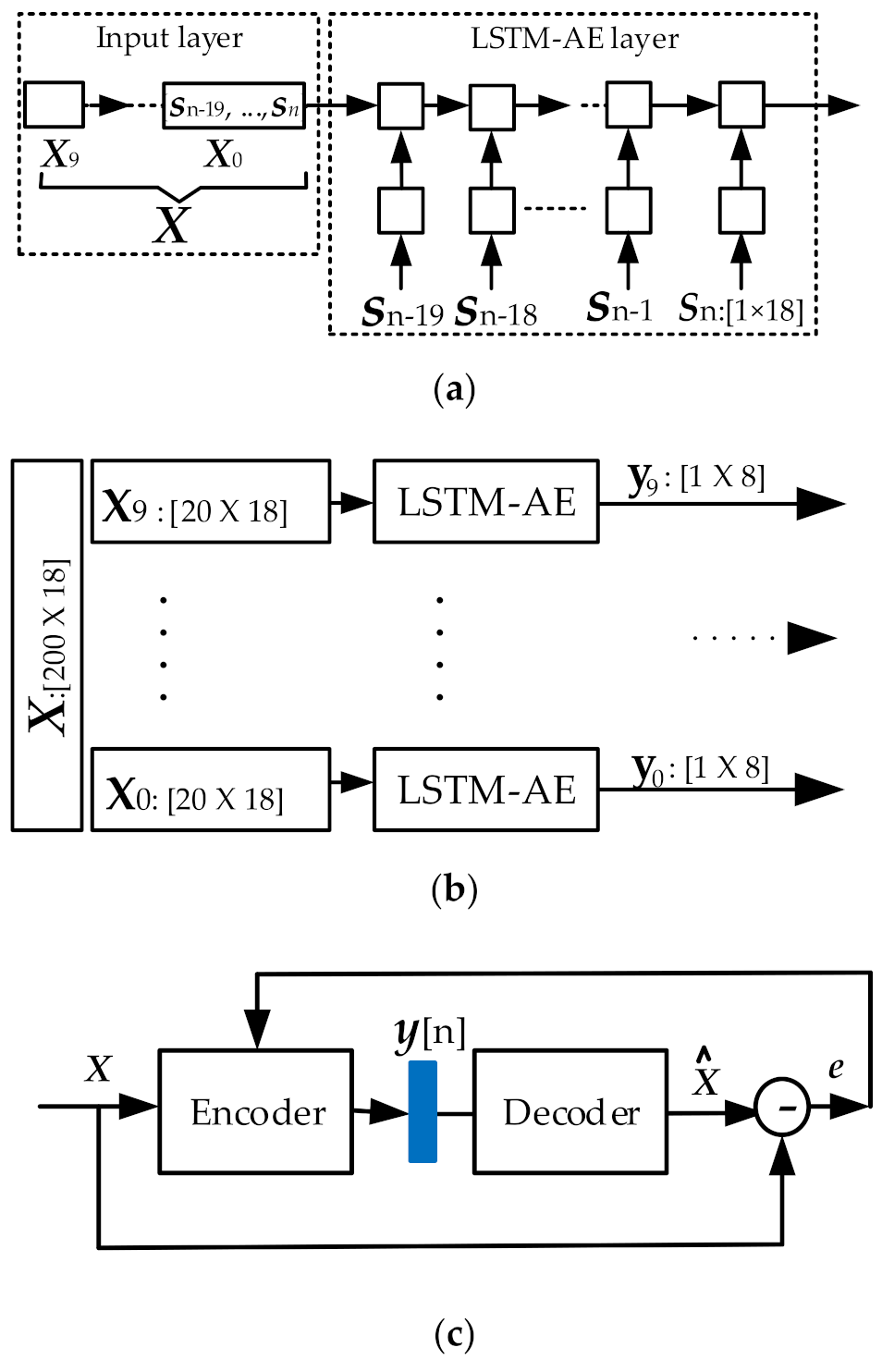
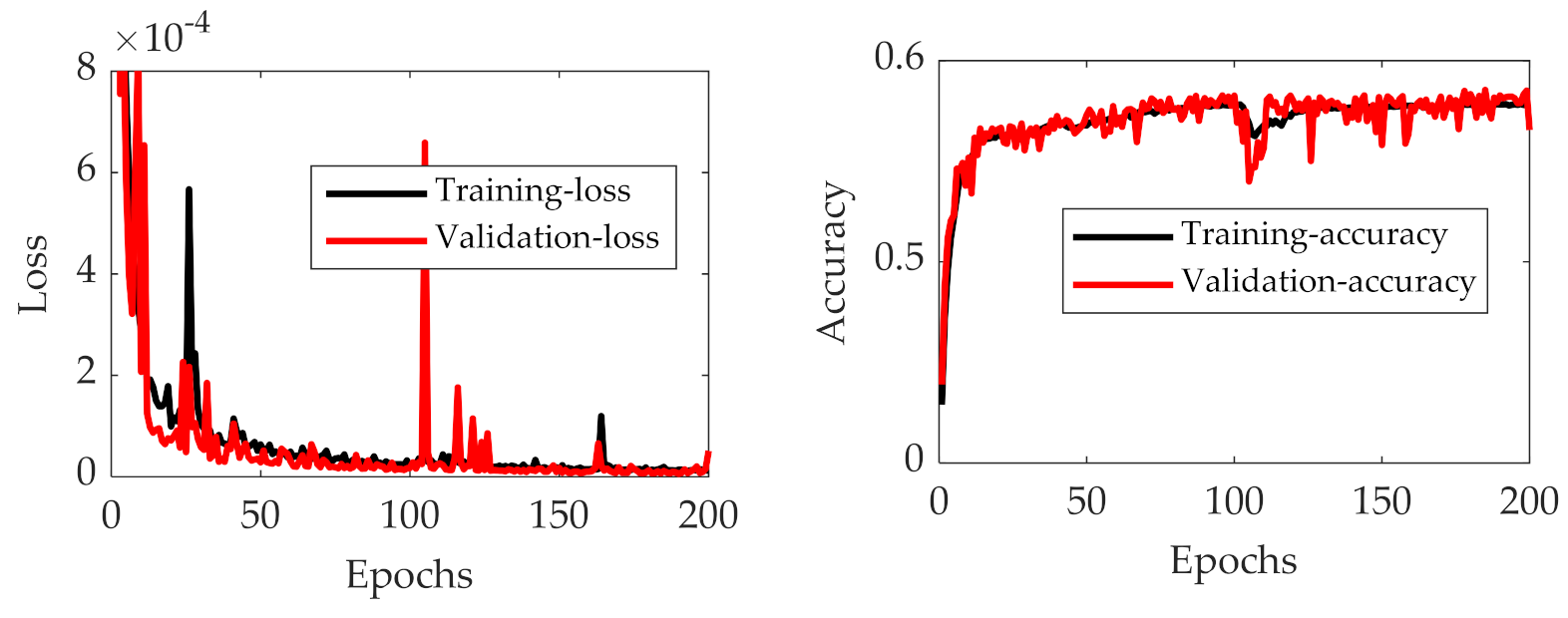
3.4.2. Training and Validation of LSTM-AE Network
To verify the proposed scheme, five case studies were conducted. The aim of these studies was to evaluate different aspects of performance in both steady-state and transient conditions. The case studies verified several aspects of performance of the proposed method including: (1) the performance of the proposed method for estimating grid impedance magnitudes variations at fundamental frequency (50 Hz) due to load changing; (2) the performance of entire proposed scheme when input data sequences included both local and remote locations; (3) the effect of using extracted features instead of using original data sequences; (4) the impact of adding measure data sequence from additional remote nodes to the performance of the proposed scheme; (5) performance comparison of the proposed scheme with the PRBS signal injection method [
4] in terms of accuracy, frequency resolution and speed. In all case studies, the performance evaluation criterion for the proposed scheme was the mean square error (MSE) measure as:
where
and
are the
ground-truth and predicted grid impedance values, respectively, and
is total number of values.
- (1)
Case study 1: performance of the proposed scheme
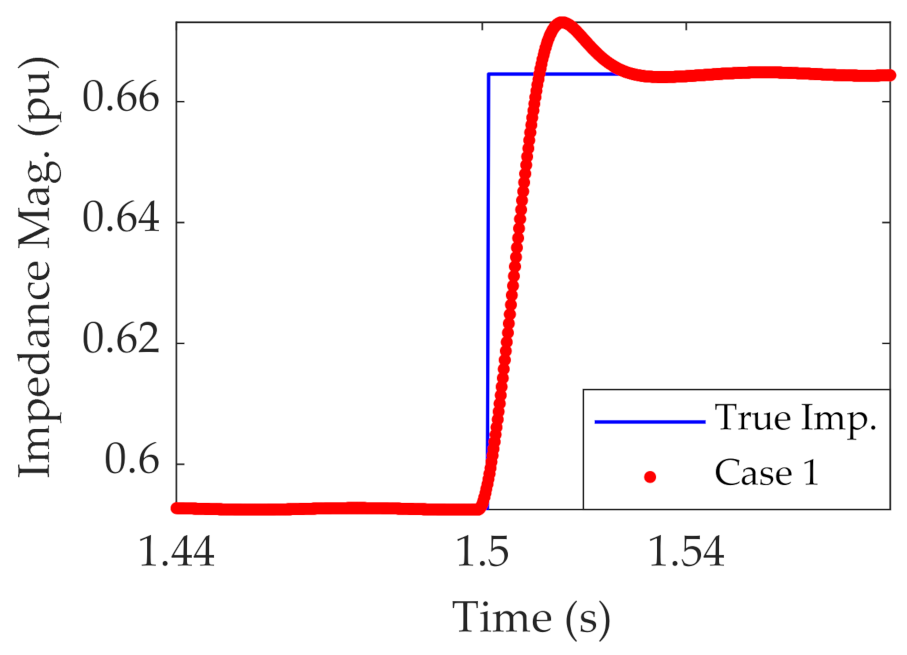
The first case study aimed at verifying the performance of proposed method for estimating the grid impedance magnitude, at fundamental frequency, due to load changing in steady-state condition. The three-phase load, namely Load 1, was changed for 20% pu at time t = 1.5 s. The load change occurred in the power grid steady-state condition. The measurement data are time-series voltage/current data from both the local and remote measurement nodes. The extracted feature vector from the LSTM-AE module was fed into the RF module to estimate the magnitude and phase of the grid impedance over time.
The corresponding MSE of the estimated impedance magnitude is 1.4.
Figure 5 shows the result of the grid impedance magnitude estimation at fundamental frequency of the proposed method. The proposed method converged to the grid impedance after 30 ms.
- (2)
Case study 2: performance of the proposed scheme
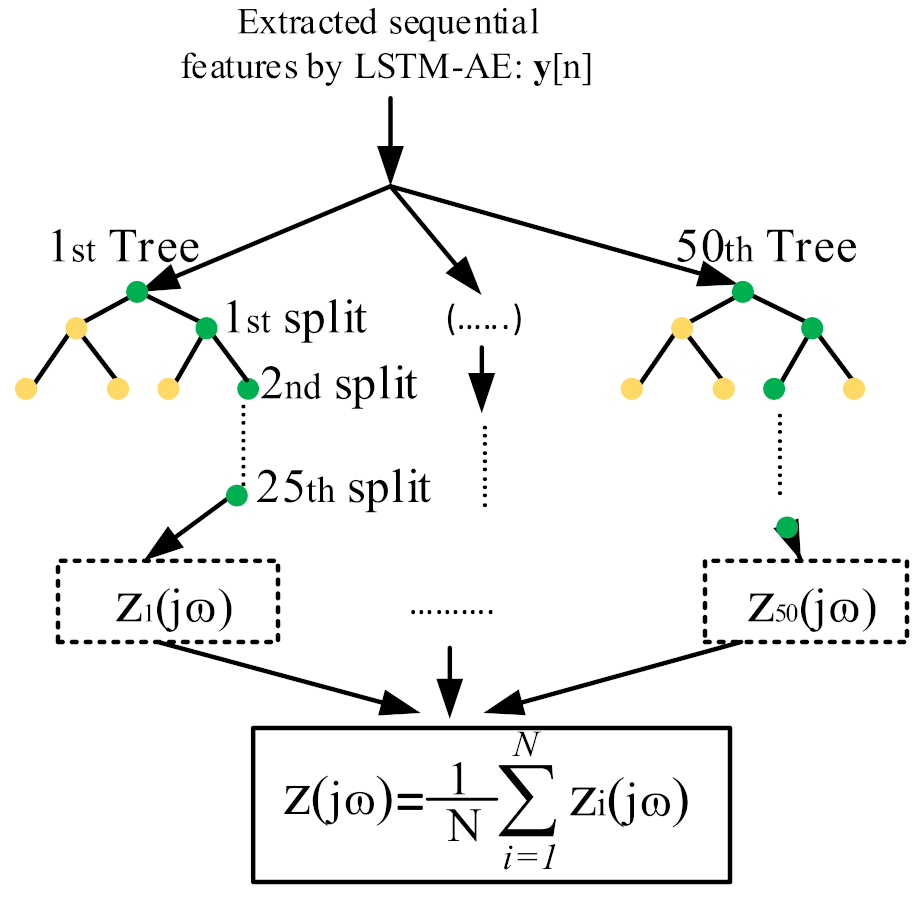
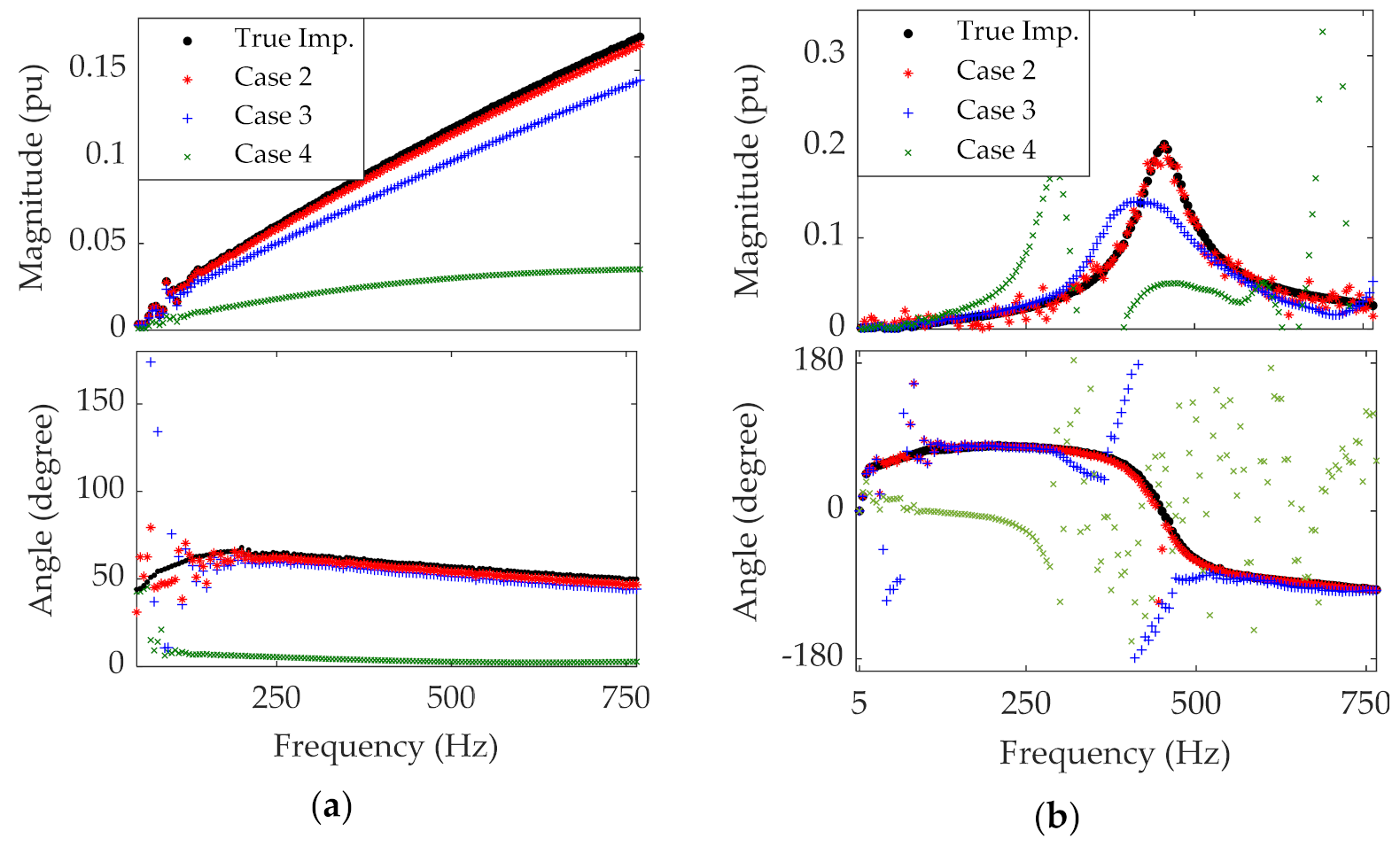
The second case study aimed at testing the performance of the entire scheme, where measurement data sequences from both the local and remote measurement nodes were used. After the LSTM-AE extracted the feature vector sequences and fed them into the RF, the estimates of the corresponding frequency-dependent grid impedances were obtained.
Table 5 shows the results of the proposed scheme in terms of MSE measure.
Observing the third row in
Table 5, MSEs of estimated impedances were 1.3 and 3.2. For each fault location (F1 or F2) we used all corresponding 200 datapoints for testing, and the shown MSE in
Table 5 is the average of 200 obtained individual MSEs corresponding to each datapoint.
Figure 6a,b (red traces) show the results of grid impedances estimated from the proposed scheme for two random datapoints corresponding to fault locations at F1 and F2.
From the results shown in
Figure 5, it can be concluded that the proposed scheme can estimate the grid impedances throughout the set of the selected frequency range. It is worth mentioning that only the positive-sequence frequency-dependent grid impedance is shown in the figure, since the negative-sequence component presented almost identical behavior.
Further, the time required for the proposed scheme is listed in
Table 6, split according to different modules.
Observing
Table 6, one can see that the training of the LSTM-AE and RF took the most time (180 + 30 min), although training was usually performed once offline. In contrast, the testing process was fast, only requiring a total of 30 ms (1.5 grid cycle) for the combined feature extraction and grid impedance estimation.
- (3)
Case study 3: performance using extracted features
The third case study aimed at verifying the effectiveness of using extracted features instead of raw measurement data for RF regression. In the tests, RF regressor estimated the frequency-dependent grid impedances, whereas the raw data (symmetrical components) was taken instead of extracted features as input. The resulting MSE values are shown in
Table 5. Observing
Table 5, one can see that without applying feature extraction (i.e., LSTM-AE module) in the proposed scheme, the MSEs of the estimated impedances were 8.4 and 8.67 at points F1 and F2, respectively. The MSE values increased by 7.1 and 5.57 as compared with the first case study where the LSTM-AE module was used. This demonstrates that feature extraction using the LSTM-AE is effective.
To further compare the performance,
Figure 6a,b, (blue traces) show the estimated grid impedances at the same data points as those in case study 1. Observing
Figure 5, the proposed scheme without employing the LSTM-AE module does not yield a relatively accurate estimation of the grid impedance. The estimation result is very close to the average of all trained datapoints. It can be considered as a drawback of RF for estimating the regression function between time series. As shown in the first case study, extracting sequences of time-dependent features of time series helps the RF regression method to determine the time-dependent relations between input/output data.
- (4)
Case study 4: performance using only local data
The fourth case study aimed at examining the performance impact of the proposed scheme by ignoring an additional measurement data sequence from remote locations. In this study, only the local measurements at node B1 in
Figure 1 were used as an input to the LSTM-AE architecture. The fifth row of
Table 5 shows the resulting MSE values of the estimated impedances. Observing the results, the MSEs were 20.2 and 46.8 when the electrical faults occurred in points F1 and F2, respectively. The results showed that ignoring remotely measured data leads to a dramatic change in the results.
To further compare the performance,
Figure 6 (green traces) shows the estimated frequency-dependent grid impedances seen from node B1 at two random data points, the same as in all previous case studies. Observing the results in
Figure 5, one can see that the proposed scheme cannot predict the frequency-dependent grid impedance precisely if the remote measurement data are not used. During fault occurrence the grid structure changes, adding the measurement at remote location and enabling the proposed method to learn the grid structure.
- (5)
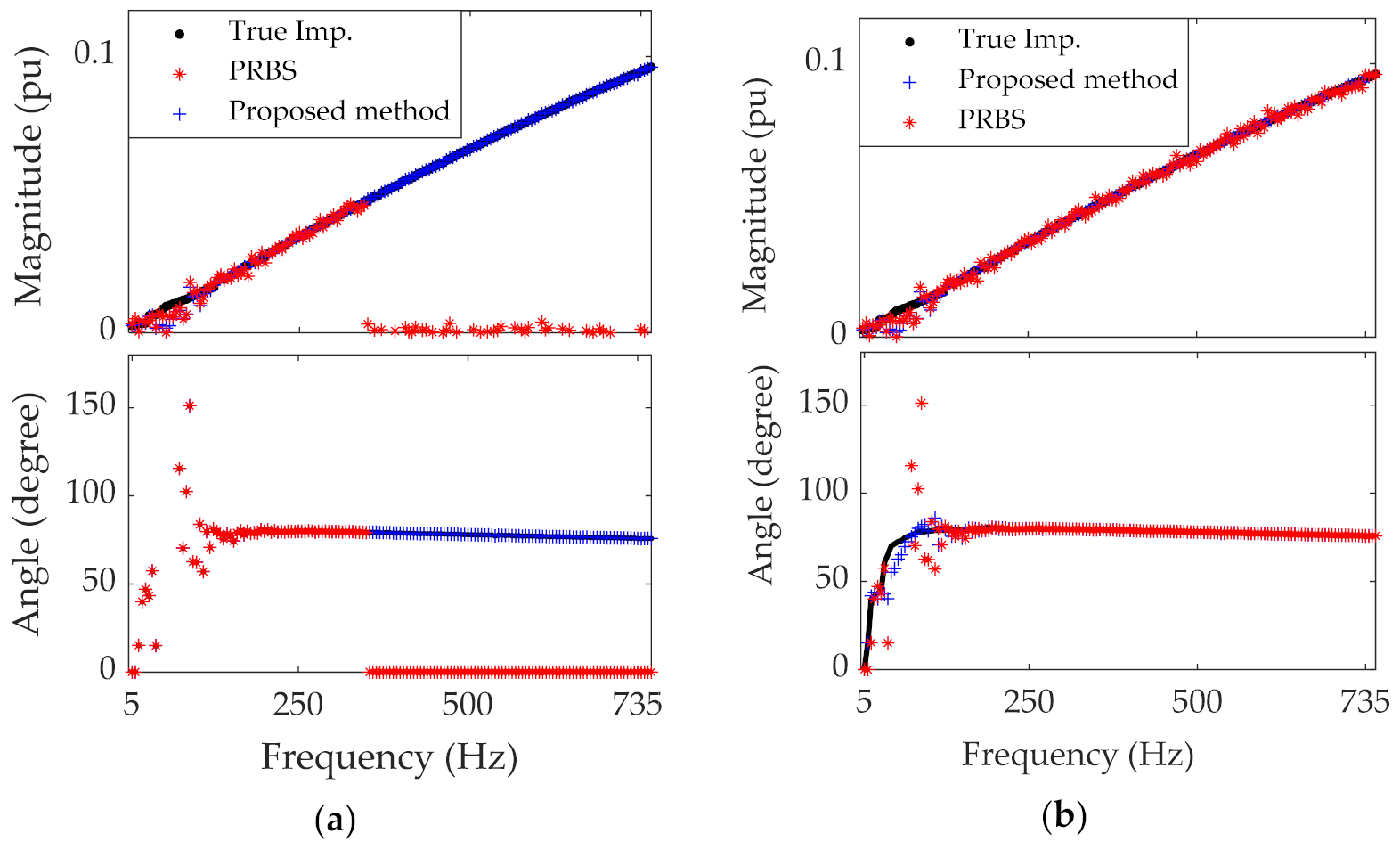
Case study 5: comparison with wide-band signal injection method
In the fifth case study, the performance of the proposed scheme was compared with the wide-band PRBS signal injection method [
4] in terms of accuracy, frequency resolution and speed.
In the existing method, the PRBS used as the excitation signal was generated by using
, where a sequence was generated under 10 kHz sampling frequency [
24]. The PRBS magnitude was set to 1% pu to avoid interfering with the transformer’s no-load voltage tap-changer setting that was approximately 0.5–1.7% on the LV side [
25]. The generated PRBS signal was then added to the
-axis reference voltage (
) of the power converter controller. After that, the three-phase voltage and the currents were measured at the node B1 for a duration of 1.0 s. The DFT of the positive-sequence components of both voltage and current were derived to estimate the positive-sequence frequency-dependent grid impedance. The time-domain signal was multiplied by the flat-top window [
26] to obtain an approximate periodic signal. It is worth noting that it was not feasible to use the signal injection method for grid impedance estimation during a fault occurrence. Therefore, we compared the PRBS injection and the proposed scheme in the steady-state condition.
Figure 7a shows the resulting grid frequency estimates using the PRBS signal. Observing the results, the PRBS signal injection method seems to have generated good performance at frequencies below the filter’s cut-off frequency, which is 335 Hz. This case study was then repeated by increasing the PRBS magnitudes to 0.1 pu, and the voltage signals between the RL and RC networks of the filter were measured, as in [
4].
Figure 7b shows the obtained result, where the corresponding MSE was 1.4.
The signal injection method was not feasible during large transients. In addition, using a large magnitude for excitation signal might be harmful to other sensitive devices, and the excitation signal with a small magnitude could not be used for estimating the impedance at higher frequencies. Further, the signal injection was slower than the proposed scheme. To estimate grid impedance at lower frequencies like 5 Hz, one needs at least a one-second measurement to perform an acceptable DFT spectrum, while the proposed method needs only one grid cycle measurement value, and the computation demand is 30 ms.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}