1. Introduction
Urban distribution systems are the most critical element of industrial supply chains, accounting for the highest share of delivery costs and originating significant externalities such as traffic congestion, energy waste, air pollution, and noise. In addition, in historic city centres, last mile delivery services are also a main cause of deterioration of the architectural and cultural heritage. The advent of e-mobility and the exploitation of electrical vehicles for the movement of goods represents, in this regard, a great opportunity to drastically reduce the polluting emissions, particularly in large city centres, where traffic congestion is a critical issue. The use of battery powered electric vehicles substantially reduces the environmental impact of urban delivery operations by centralizing the production of energy in distant and efficient power plants with advanced pollution abatement systems. For such reasons, interest towards the employment of electric vehicles in urban freight operations has significantly risen in the last decade, and the landscape of transport vehicles has been enriched with several innovative solutions including electric vans, e-cargo bikes, driverless carts, drones, etc. In such a variegated market, both scientists and practitioners are still debating the most efficient solution for future city logistic systems. For example, it is well known that some global market operators (e.g., Amazon) are investing in drone technology, while other companies are focusing on self-driving ground systems or more traditional lightweight e-vans.
From a scientific perspective, although several papers have comparatively analysed the performance of different vehicles, few researchers have actually addressed the issue of optimizing the configuration of the vehicle in relation to the needs of the service. The choice of an optimal means of transport, in fact, cannot be addressed solely from the perspective of the vehicle, but must be referred to the specific operational context, being influenced by several parameters such as the maximum operating range, the maximum payload, and the population density. In such regard, a flexible vehicle capable of adapting to a several operating contexts can be a more advantageous choice than a vehicle with a high performance in a limited operating range. In other words, the flexibility of the logistic system and its capability of operating several different services efficiently can actually be a more effective choice than a high-efficient solution in a narrow operating range.
In such regard, it must be considered that the proliferation of single day delivery (SDD) for the business to consumer (B2C) e-commerce market, in the last decade, has drastically changed the scenario of urban logistic and freight transportation systems, substantially increasing the segment of fast and cheap parcel delivery services compared with courier and express deliveries. In addition, the advent of e-commerce has also impacted the weight distribution of the parcels delivered, with the number of “mailers,” (0–3 kg) and “small parcels” (3–6 kg) increasing compared with “large deliveries” (more than 6 kg). Finally, the tightening of environmental regulations and the consequent traffic restrictions enforced by local administrations have significantly contributed to making traditional urban distribution systems inadequate for the new challenges of smart urban delivery.
City logistic systems based on e-cargo bikes, when properly designed, can arguably outperform many other vehicles in terms of flexibility, sustainability, and efficiency, and are therefore an ideal solution for the operators of last mile delivery services. Indeed, with the technological advances in energy storage systems and the development of lightweight electric motors and pedal assist systems, modern transport bikes are flexible vehicles with a high load capacity and are capable of travelling long distances, overcoming slopes, and operating in various territorial contexts. Such advantageous features, combined with the low cost of ownership, and with the possibility of overcoming traffic restrictions in city centres, have contributed to the spread of these vehicles in urban delivery systems. An additional advantage of e-cargo bikes, compared with traditional delivery trucks, is that as long as specific regulatory requirements are met, they do not require any type-approval, nor do they involve any obligation of insurance, road tax, driving license, and registration plate. With such features, their operational management is fairly simplified, while significant cost benefits can be achieved. To fully exploit the possible benefits of a delivery service based on e-cargo bikes, the design of the vehicles should be optimized design in order to maximize the overall performance of the logistic system considering the service requirements. Service providers are thus interested in selecting, among the solutions available on the market, the one that best fits the characteristics of the service operated and, in some cases, they have also undertaken specific activities for the design and development of their own customized vehicles. Such an example is the “City Hub” cargo bike created by DHL, featuring a custom trailer capable of transporting up to four small containers, with an overall volume of approximately one cubic meter (0.8 m × 1.2 m × 1 m) and an overall payload of 150 kg.
On the basis of these considerations, in this research, the issues related to designing a cargo e-bike, according to the criteria of modular design, are discussed, with the objective of obtaining a vehicle capable of operating effectively in a wide landscape of urban contexts. The aim of the research is to analyse the trade-off between the battery size and the available payload, considering the requirements of the service operated and the specific features of the operating context (e.g., density of delivery demand). On the one hand, increasing the capacity of the battery packs allows for longer delivery routes, but also reduces the available payload, therefore reducing the number of serviceable clients. In analysing such a trade-off, the paper ultimately aims to propose a modular approach to the design of a cargo e-bike and a decision methodology for selecting the most effective vehicle configuration in relation to the specific operational context and service requirements. The remainder of the paper illustrates the state of the art of the research in the first section, and discusses the methodology for the modular design of a cargo e-bike in the second section. The third section proposes the methodology for multi-criteria optimization, while the fourth section discusses the decision-making problem. Finally, the last section reports a discussion of the results and the conclusions, including the managerial insights and future developments.
2. Literature Review
The research proposed is related to the general framework of the optimization of urban logistics through the exploitation of innovative electric vehicles. While the recent technological advances in energy storage and propulsion systems have been a fundamental enabler of e-mobility applications for urban logistics, their spread has been mainly promoted by the necessity to cope with the renewed sensibility towards the environmental issues, and by the introduction of new business models in the context of the sharing economy. A clear example of this is the recent diffusion of “crowdshipping” as a more sustainable and cost-effective business model for urban logistic services, operated by occasional and non-professional actors, typically by means of small and low polluting vehicles. In such a context, urban delivery services based on cargo bikes have received substantial attention in the last decade. A consistent body of literature, focuses particularly on solving operational management problems aimed at optimizing cargo bike routes considering the service demand at the delivery points. The service demand can be estimated based on real-world observations from cargo bike trips using GPS devices installed in vehicles [
1,
2], from the data provided by service operators [
3,
4,
5], or on the synthetic demand generated according to specific assumptions [
6,
7,
8]. Based on such approaches, Lee et al. [
9] found that up to three cargo bikes can replace a van in a dense area of Seoul (South Korea), also reducing costs by 14%. Similarly, Zhang et al. [
10] reported reductions of up to 28% in costs and 22% in emissions when using cargo bicycles to replace nearly all van package deliveries in one scenario in Berlin (Germany). Anderluh et al. [
8] also reported potential cost reductions by using cargo bicycles in combination with vans.
While the cost-effectiveness of cargo bikes is well-recognized in the scientific literature, some authors have also highlighted specific advantages compared with traditional transport vehicles, such as the ability to drive in narrower roads (due to their small size) [
9], the reduction of direct emissions (with electric-assisted vehicles) [
11], lower noise levels, and the ability to park closer to the end customer, thus reducing the walking distance. Contrarily, the drawbacks related to urban cargo-bike delivery that emerged in the previous studies are the limited operating range [
12], slower travel speed, and reduced capacity compared with vans.
It must be pointed out, however, that the above-cited studies generally referred to logistic systems operated in specific operational contexts, assuming that proper facilities such as dedicated bike lanes and consolidation centres were available within the urban areas. Nevertheless, the variegated landscape of urban contexts with different morphological features and the wide range of logistic services required makes it difficult to generalize the obtained results. In such regard, Lenz and Riehle [
11] identified the need to conduct further research on the spatial distribution of demand and the local spatial context of different cities, including customer locations and existing transport infrastructures. The availability of supportive infrastructures is actually a critical issue for the implementation of urban cargo bike delivery systems, as such systems typically require a dedicated distributed infrastructure constituted by micro depot areas with a high population density [
11]. The traditional “single-tier” delivery schemes, based on extra-urban consolidation and distribution centres, which nowadays constitute the backbone of distribution systems, are in fact inadequate for the employment of short-range EVs for parcel delivery. Indeed, because of the limited endurance of EVs, the distribution chains must be re-designed with the introduction of an additional proximity tier operating direct delivery services to the customers at the city scale. Existing studies have also identified the essential prerequisites for the growth of cargo bike logistics, such as central deposits, called urban consolidation centres (UCCs) [
13,
14], urban distribution centres (UDCs) [
15], and urban micro-consolidation centres (UMCs) [
16]. Such infrastructures are supposed to operate in “two-tier” distribution schemes, recently proposed for city logistics based on EVs [
17]. Such logistic systems involve extra-urban CDCs located at the outskirts of the urban zone for first level of consolidation activities, and a second set of infrastructures located inside the city for last mile distribution [
16,
18,
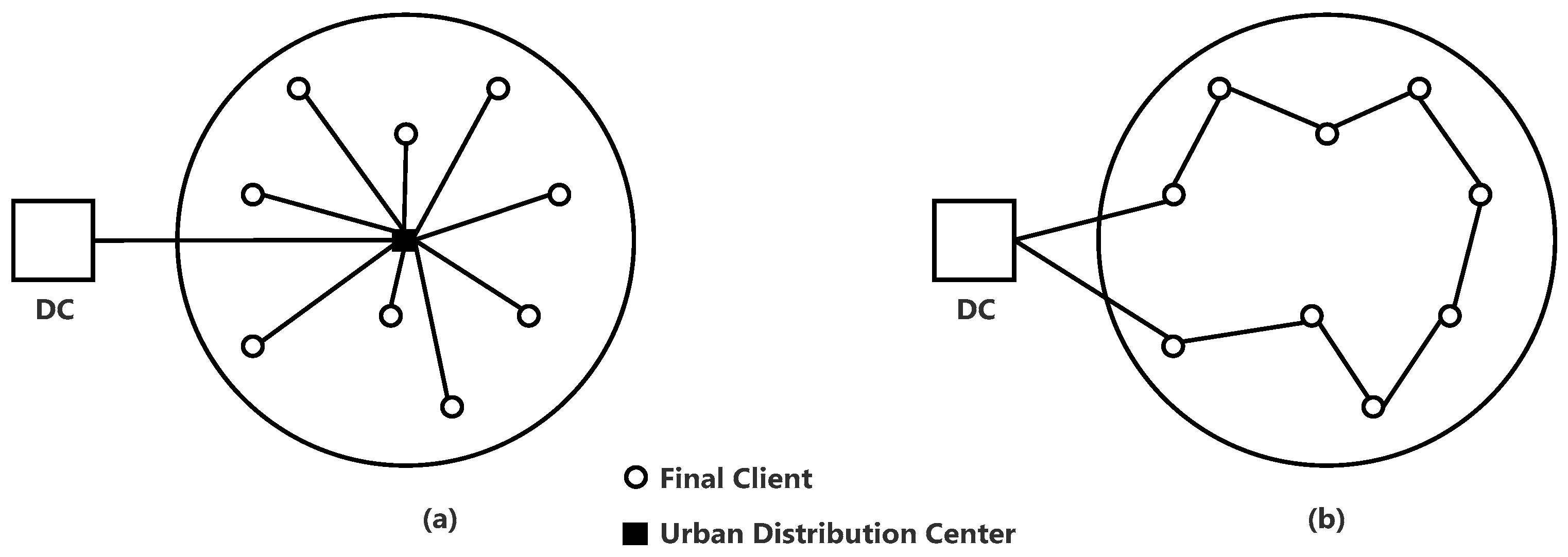
19]. In order to minimize the nuisance effects on urban traffic, freight vehicles connecting external zones to urban depots can be canalized into appropriate corridors, while city-freighters move along the urban road network to perform the final deliveries (
Figure 1).
In several cities where such infrastructures have been deployed, the employment of e-cargo bikes for parcel delivery has become a commercial service, and is nowadays recognized as an effective solution for the development of next generation city logistic systems. A recent study [
20] reported that in European cities, potentially 42% of courier deliveries could be substituted by cargo bikes, while the results of the recent Cyclelogistics (2011–2014) and Cyclelogistics Ahead (2014–2017) projects (
www.cyclelogistics.eu, accessed on 6 February 2021) indicate that, on average, 51% of all motorized journeys in European cities involving the transport of goods could easily be moved to bicycles or e-cargo bikes [
21]. In addition, a recent survey executed within the EU-funded City Changer Cargo Bike project reported 17,800 sales of cargo bikes across Europe in 2018, 28,500 in 2019, and an expected target of 43,600 in 2020. Current studies, however, show an uneven geographical distribution of cargo bike services, with countries in Southern Europe still in the early stages of development, while UK and Northern Europe are more advanced, with commercial services regularly operating in some cities. In their quantitative analysis of operational and external costs, the authors of [
22] suggest that such models are a viable solution to satisfy both public and private stakeholders. Similarly, Lenz, and Riehle [
11] demonstrated that cargo e-bikes are positioned between bikes and cars in terms of cost, payload, and range, thus being suitable for specific logistic services, including food and courier deliveries, characterized by small and lightweight parcels. In terms of the decarbonisation of the urban logistics sector, a London-based case study found that the total distance travelled and CO
2 emissions per package delivered decreased by 20% and 55%, respectively, as a result of delivery systems that used urban consolidation centres and small electric vehicles and cargo tricycles [
13]. A Dutch study estimated possible annual fuel savings for the Netherlands of 8,500,000 litres of diesel or 21,000 tonnes of CO
2 [
23]. e-CBs have the greatest potential in urban areas because of their ability to bypass congestion and gain access to areas with environmental or delivery period limitations [
11]. In addition, city regulations are nowadays oriented towards the increment of the direct and indirect costs of driving and parking in city centres, thus encouraging the adoption of cargo-bikes as a mode of transport [
12,
24].
Despite the relevance of the above-mentioned results, logistics services using e-CBs for urban freight are still often operated on a small scale, and are rarely connected vertically or horizontally with the existing distribution networks. Cargo bikes are thus rarely employed in same-day delivery services [
23] required by the modern e-commerce distribution systems, therefore they are not significant enough to push suppliers to adopt them [
22]. In addition, as Lenz and Riehle [
11] point out, different modes of courier services compete in very similar markets, therefore fragmenting the overall demand. Such inefficiencies may ultimately hamper the establishment of an effective sustainable development strategy for urban delivery services. In addition, the optimized design of the supportive infrastructures has emerged a critical issue for the successful implementation of urban logistic systems based on cargo bikes. In such situations, logistic operators operating different services should have the possibility of deploying their own infrastructures, specifically designed for their service requirements. The coexistence of different infrastructures in the same urban context, however, is unpractical, while the involvement of the public sector in providing the required amenities would surely be advisable. Clearly, in such a case, the vehicles employed should be flexible enough to allow different operators to operate their services efficiently through common a supportive infrastructure. The role of public institutions thus becomes of paramount importance for fostering the development of effective urban delivery models through the deployment of shared urban infrastructures and the promotion of public−private cooperation [
25].
According to the considerations reported above, the literature on urban delivery systems based on cargo bikes is focused on the design of logistic systems, while the issues related to the optimization of the design features of the vehicles are rarely discussed. This paper is, to the best of our knowledge, the first study that discusses the design of the vehicles for the specific operational context and service requirements, therefore covering this research gap. This research, in particular, focuses on the issues related to the optimization of the vehicle design for urban delivery operations, with the aim of proposing a flexible and modular e-CB capable of operating in different scenarios. Modularized product design is a modern approach allowing for the development of horizontally and vertically differentiated product lines based on the employment of a restricted number of interchangeable components. Such an approach allows manufacturing companies to best fulfil the preferences of a diversified target market, while achieving a good efficiency in their supply chain, through the exploitation of scope economies [
26,
27]. Modularized design has proven its effectiveness in the design of vehicles for the automobile industry [
28,
29], where modular platforms have become a fundamental driver of competitiveness in modern production networks. Analogously, the approach proposed here aims at designing an e-cargo bike that can be easily optimized for different service targets, taking advantage of a standardized platform and a customized set of components. It will be demonstrated that such an approach allows for determining the most suitable configuration in order to maximize the performance of the vehicle, considering the specific requirement of the service operated. The selection of the most effective configuration to maximize the performance of the vehicle is considered here at a strategic level, and will be carried out through a multi criteria decision process, taking into account different aspects such as cost, serviced area, and delivery time. The necessity of considering multiple objectives when planning a logistic service is well recognized, and derives from the conflicting interests of the several stakeholders involved. In general, in a multi-criteria problem, there is not a single solution that optimizes all the criteria at the same time, and therefore compromise solutions must be determined. In such a situation, the employment of a transparent multi-criteria decision analysis (MCDA) method is necessary for ensuring adequately reliable results. The literature on MCDA can be divided into three main groups, namely value-based methods, outranking methods, and distance-based methods. The value-based methods are probably the most widespread, and involve performance aggregation approaches, such as the multi-attribute value theory (MAVT), multi-attribute utility theory (MAUT) [
30], and the analytic hierarchy process (AHP) [
31]. Outranking methods involve preference aggregation approaches such as the Preference Ranking Organization and Method for Enrichment Evaluation (PROMETHEE) [
32] and the Elimination and Choice Expressing Reality (ELECTRE) [
33]. Finally, distance-based methods involve the calculation of the distance from the alternative with the worst or the ideal (best) solution, and the most common method used is the Technique for Order Preference by Similarity (TOPSIS) [
34]. Such methods have been frequently employed in the selection of transport alternatives in logistic and distribution systems. In such regard, significant contributions were provided by Yedla and Shrestha [
35], who employed AHP to evaluate six sustainable transport modes, and by Tsamboulas and Mikroudis [
36], who presented a multi-criteria assessment framework of the environmental impacts and costs of transport initiatives. Finally, Awasthi and Omrani [
37] presented a belief theory and AHP-based approach to evaluate sustainable transport solutions. In this research, TOPSIS was selected because of its capability of taking into account the preferences of the decision makers, while maintaining the solid logical structure the lean computational effort that characterizes strategic decision problems.
3. Vehicle Design and Optimization
The term electric cargo bike identifies a whole class of vehicles featuring two- to four- wheel frames, with several hours of endurance, capable of transporting payloads up to 400 kg and volumes up to 3 m3. In such situations, service operators are interested in choosing a vehicle that best fits the specific requirements of the service operated. Clearly, choosing a flexible solution that can easily adapt to different situations may represent a strategic choice in multiple or uncertain scenarios. Based on such premises, the design of a flexible e-CB is discussed in this section, highlighting the opportunities of modular design approach in order to obtain a vehicle capable of adopting different configurations, depending on the specific service operated.
A preliminary design requirement is the compliance with the European regulation (EU Directive 2002/24/EC) on e-bikes and pedelecs (cycles with pedal assistance that are equipped with an auxiliary electric motor), which defines the mandatory prescriptions for cycles equipped with an auxiliary electric motor to be legally considered a conventional bike. Such requirements are listed below:
0.25 kW maximum engine power;
Assistance of the electric motor up to a speed of 25 km/h;
Interruption of assistance if the cyclist stops pedalling;
Maximum payload 500 kg.
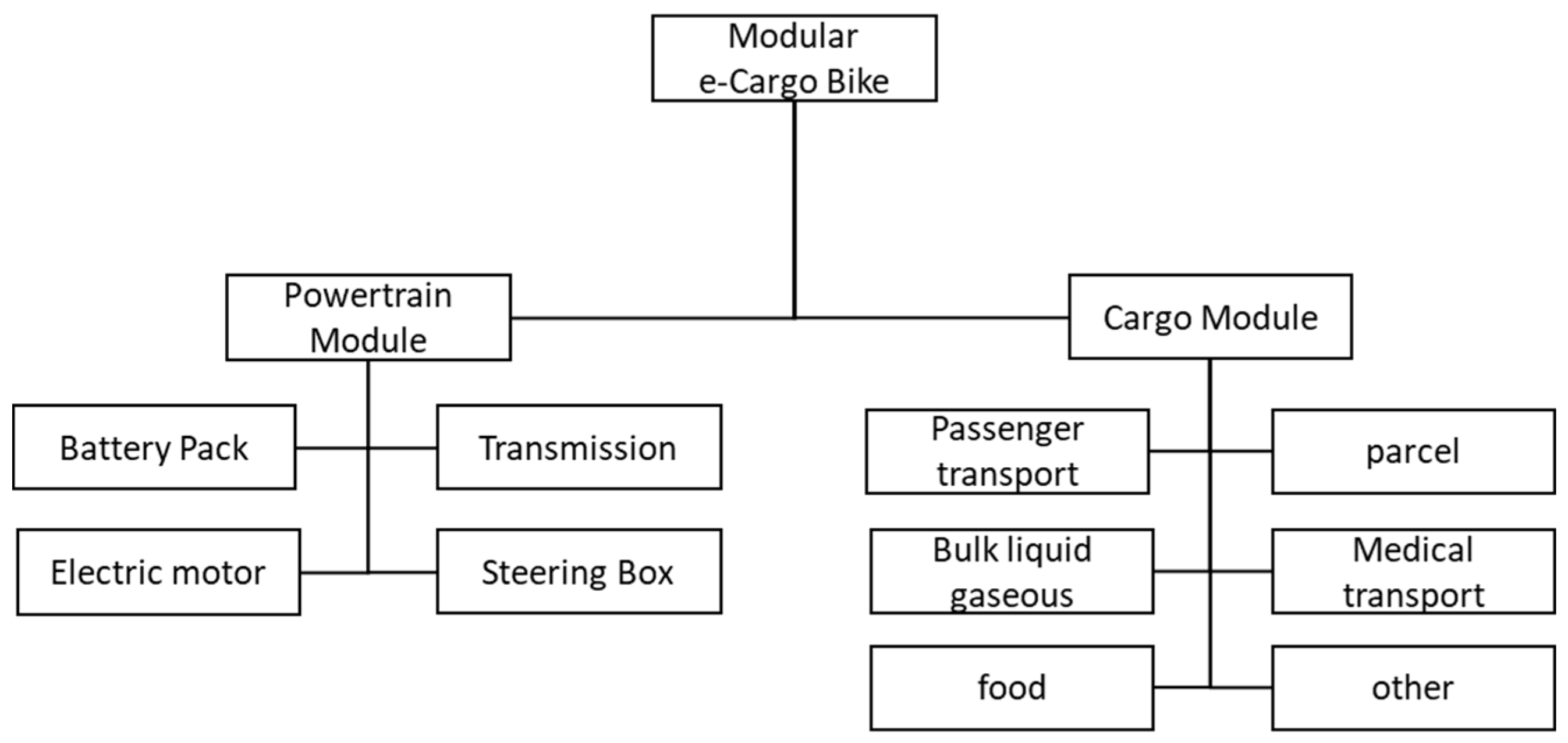
Besides complying with such requirements, the other design parameters significantly impacting the performance of the vehicle are its technical features, transport capacity in terms of weight (payload) and volume, and the capacity of the battery pack. According to the modular design proposed, the basic structure of the vehicle involves a front-wheel drive and an aluminium tubular frame featuring four wheels with independent suspensions. The e-CB is then structured in two modular elements: a frontal technical module and a rear cargo module. The front module contains the cabin and all of the relevant mechanical systems required for manoeuvring, including the steering wheel and the steering box, the drive system, the battery pack, and the cockpit. The front-wheel drive develops from the crown of the pedal, which activates the integrated motor, and includes the centrifugal expansion clutch, connected to a transmission chain. Electrical assistance comes into action at low speeds, activating the drum where a second pulley transmits the movement of the wheels by means of a belt. The rear module is dedicated to the cargo and is designed to allow for the installation of different multipurpose interchangeable modules. In the case considered here, the e-CB will be employed for parcel delivery, therefore the rear module is constituted by a container. Alternatively, different modules can be installed for transporting, e.g., liquid or gaseous substances, or for passenger transportation, medical assistance/transport, food delivery, etc. The general schematic concept of the modular vehicle structure and its main components are given in
Figure 2.
Coherently with the above-reported design requirements, the vehicle will be equipped with a 48 V, 250 W brushless electric central motor powered by a lithium-ion battery housed under the chair. Such mid-drive motor technology places the powertrain in the bottom bracket of the vehicle, between the pedals, thus lowering the centre of gravity and increasing the stability of the vehicle. The engine transfers the motion through the chain, exploiting all the gears of the front wheels by combining them with two front crowns—one for power and one for speed. Despite its great compactness, such an assembly ensures a surpassingly high reduction ratio of the engine, thus allowing for maintaining the rotation speed close to the point of maximum efficiency, with a consequent increase in performance, in terms of torque, drastically reducing battery consumption.
Another essential and innovative element is the centrifugal expansion clutch, which transfers the torque to the front wheels, exploiting the centrifugal force to engage or disengage automatically at fixed rotating speeds (see
Figure 3). Considering the significant overall weight of the vehicle at full payload (500 kg), the clutch must be able to open at low revs in order to limit the recoil when starting the engine under load (starting jerk).
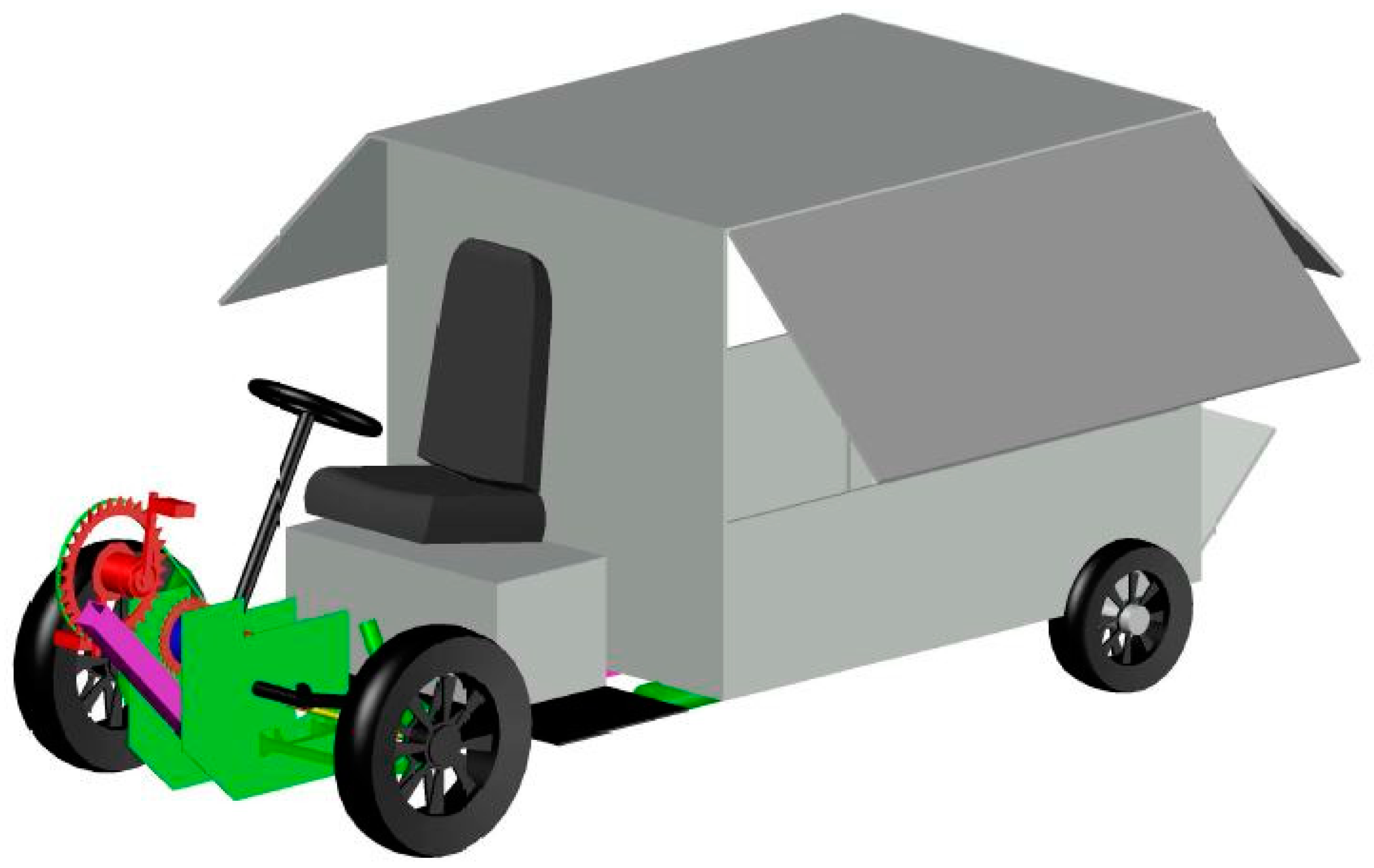
Finally, the mechanical brake system with jaws is developed on all four wheels, thus increasing safety in case of sudden braking. The front wheels have a diameter of 25 cm, while the rear wheels are smaller, with a diameter of 18 cm in order to lower the centre of gravity, thus allowing for better stability. Both wheels are fitted with reinforced R45 tires. A general overview of the vehicle is given in
Figure 4.
In such a configuration, and considering the maximum allowable weight of 500 kg prescribed by the regulation, the power losses related to air resistance and rolling friction can be calculated according to Equations (1) and (2).
where
m = mass of the vehicle,
g = force of gravity,
v = travelling speed,
Crr = rolling resistance coefficient,
ρ = air density,
Cx = drag force coefficient, and
Af = frontal area of the vehicle.
The corresponding calculations for a vehicle mass ranging from 300 kg to 500 kg, given in
Table 1 demonstrate that, at maximum weight, the power required to overcome the air resistance and the rolling losses amounts to 205.75 W. A 250 W electric motor is thus sufficient to keep the vehicle moving at a full payload at a speed of 10 km/h. Clearly, this result should be accurately reconsidered when the vehicle operates in terrains with significant slopes.
6. Conclusions
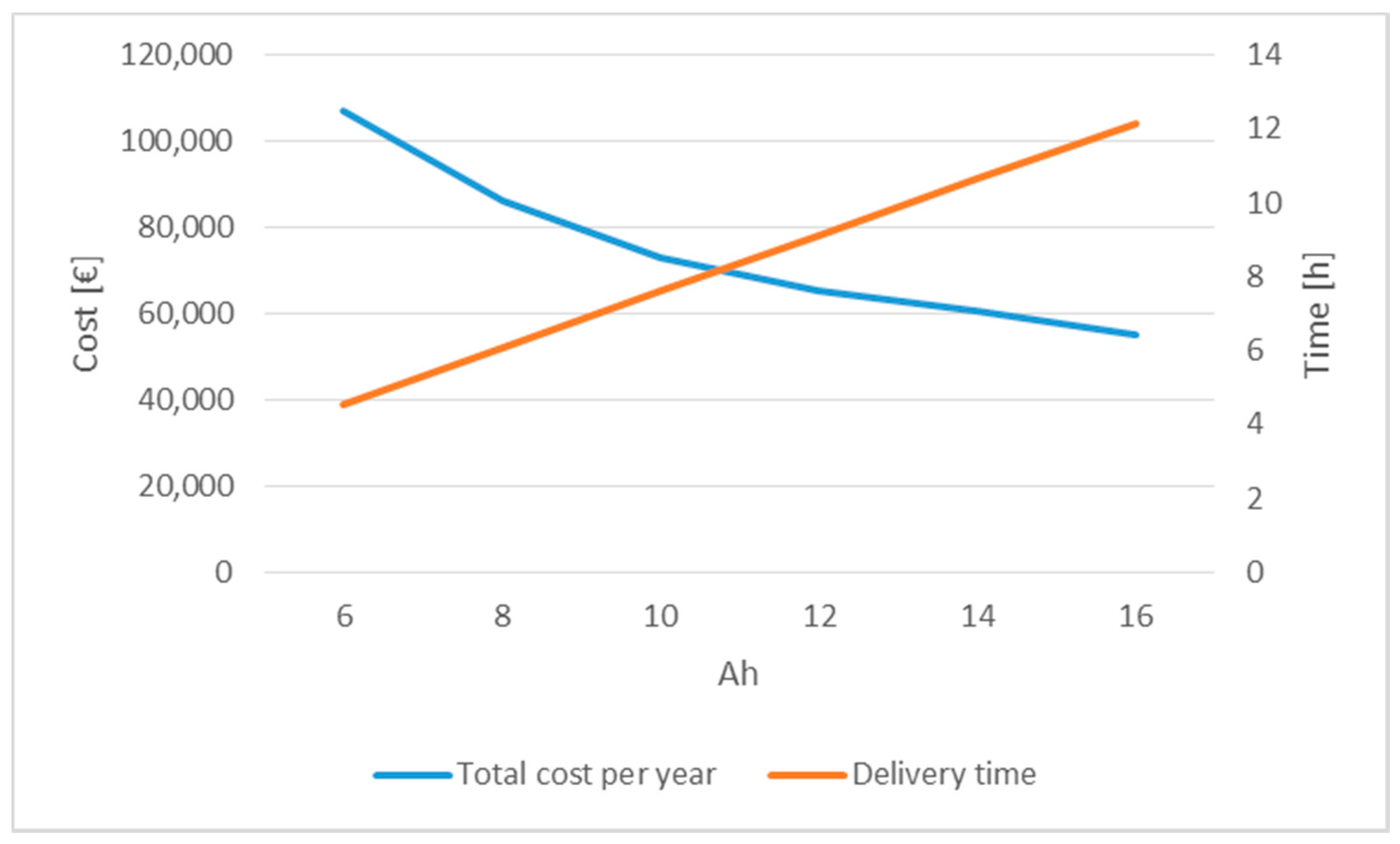
The advent of electric mobility represents a great opportunity for improving urban logistic services in terms of flexibility, sustainability, and efficiency. From a scientific point of view, this situation has originated an animated debate on the most convenient vehicles to be used in urban delivery services in order to maximize the performance of the logistics system. In such a regard, e-CBs emerge as a viable option for urban package delivery services in densely populated areas. This research aims at contributing to this topic, proposing the use of a modular e-CB, offering the opportunity of customizing the configuration to the vehicle in order to best fulfil the specific needs of the service operated. The study shows how differently configured vehicles lead to a different overall performance of the system, impacting the centralization level of the logistic system. A multi-objective approach has been employed to evaluate the trade-offs in the overall system performance, considering two optimization criteria referred to the cost efficiency and the total delivery time. A numerical application referred to the provision of envelope, parcel, and box delivery services in an urban context with a population density of approximately 2500 inhabitants per square kilometre and 137 deliveries per day per square kilometre demonstrates the effectiveness of the methodology proposed, and shows how different optimal solutions can be found in the different scenarios considered. In particular, for the box service, the maximum payload constraint substantially affects the results, and the optimal configuration corresponds to short-ranged vehicles operating in a high decentralized infrastructure. For the delivery of envelopes and packs, a substantial reduction (approximately 50%) of the overall annual cost of the system can be achieved through a more centralized infrastructure involving long range vehicles. In such a situation, however, the delivery window required to complete the operations increases substantially to more than 12 h, while in the decentralized configuration it was approximately 5 h.
From a managerial point of view, the parametrized cost model and the methodology proposed can be effectively employed to support public decision makers and logistic operators in their strategic decision problems related to the design of optimized city logistic systems based on e-CBs. Further developments of the proposed methodology may involve the extension to tactical and operational management problems, including route optimization and vehicle scheduling.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}