
A Hierarchical Control Approach for Power Loss Minimization and Optimal Power Flow within a Meshed DC Microgrid


Abstract
:1. Introduction
- Reduction in the power losses existing in the transmission lines is further added to the optimization to enhance the power flow while considering at the same time the cost reduction in the power consumption. The formulation of the high level optimization problem is done through the analytical computation of the system’s flat representation together with B-spline parametrization;
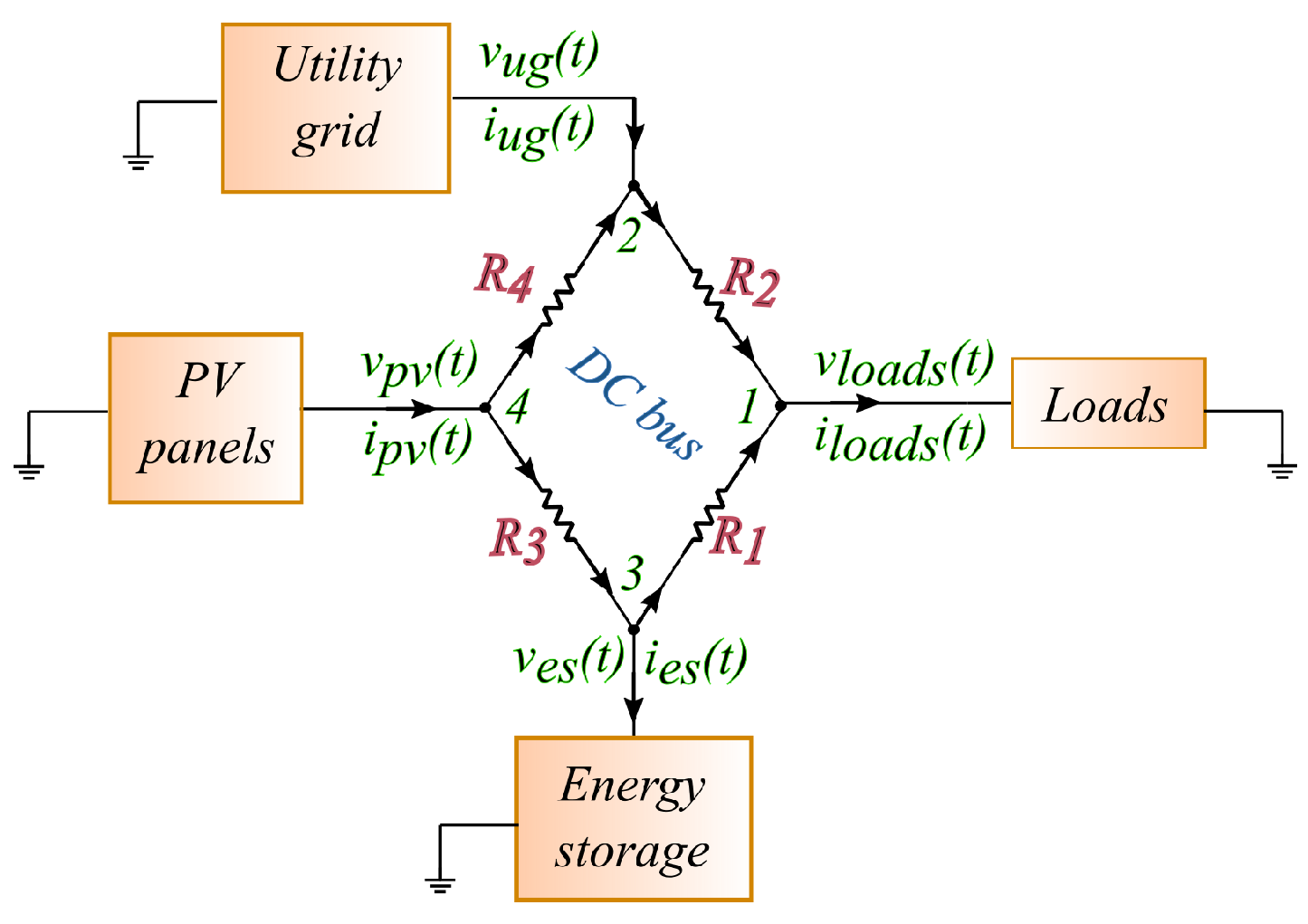
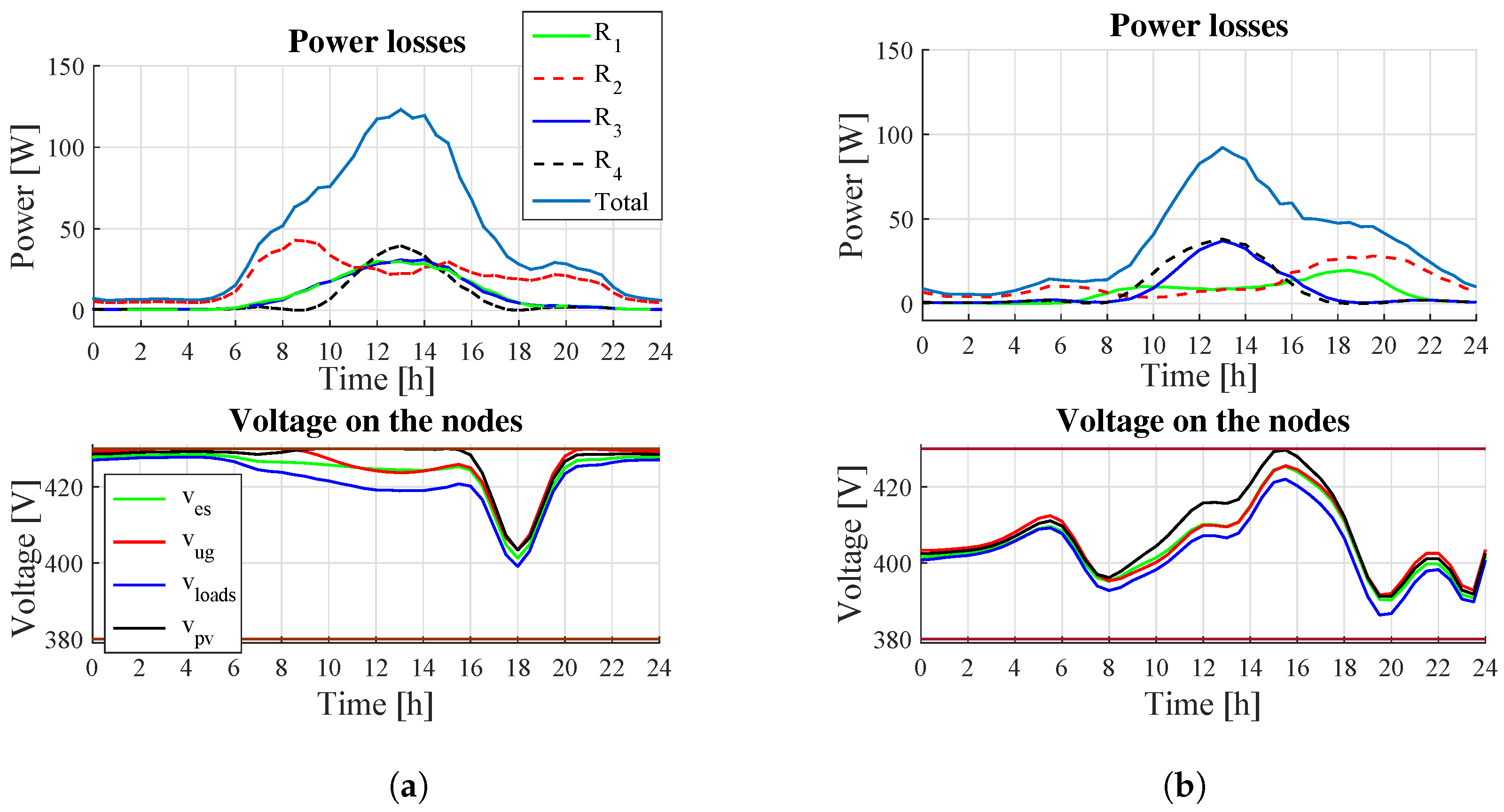
- Thorough presentation of the central transmission network describing in detail its dynamical model. The power dissipation is considered through the voltage drops among the four connecting nodes n: [13], illustrated in Figure 1 and the corresponding transmission lines are represented through four resistances, . Additional constraints are taken into consideration to preserve the DC voltage close to the reference equal to 400 V;
- Verification of the meshed topology of the central network in the case of unexpected events (e.g., blackouts).
2. Notations
| energy storage system | |
| utility grid | |
| solar panel system | |
| distributed energy resources | |
| state vector of the system | |
| input vector of the system | |
| output vector of the system | |
| n | connecting node between a source or a load and the DC-bus |
| Kinetic Battery Model | |
| P | electrical power |
| switch of the DC/DC converter | |
| duty cycles of the switches within the Split Pi converter | |
| available and bound charge of the KiBaM battery | |
| b | KiBaM battery |
| Split−Pi Converter | |
| C | capacitor |
| I | inductor |
| resistance between the KiBaM battery and the Split−Pi | |
| converter | |
| resistance of the KiBaM battery | |
| resistances of the transmission network | |
| resistance among the DC network and the Split−Pi | |
| converters | |
| output current of the Split−Pi converter | |
| output voltage of the Split−Pi converter | |
| input current of the Split−Pi converter | |
| input voltage of the Split−Pi converter | |
| r | derivative of the B-spline |
| th control point | |
| th B-spline of order d | |
| vector of the B-splines | |
| vector of control points | |
| translation matrix from higher to lower degree basis | |
| functions | |
| matrix performing the linear combinations of the | |
| lower-degree basis functions | |
| T | knot vector |
| th knot | |
| number of knots | |
| e | electricity price |
| weight matrices |
3. DC Microgrid Model Description
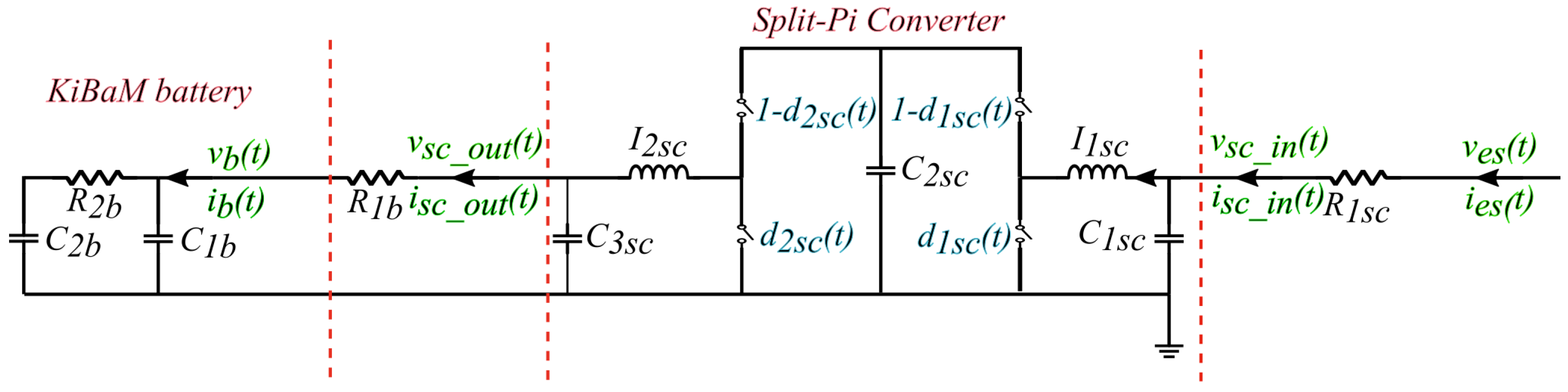
3.1. Brief Description of the ES Subsystem
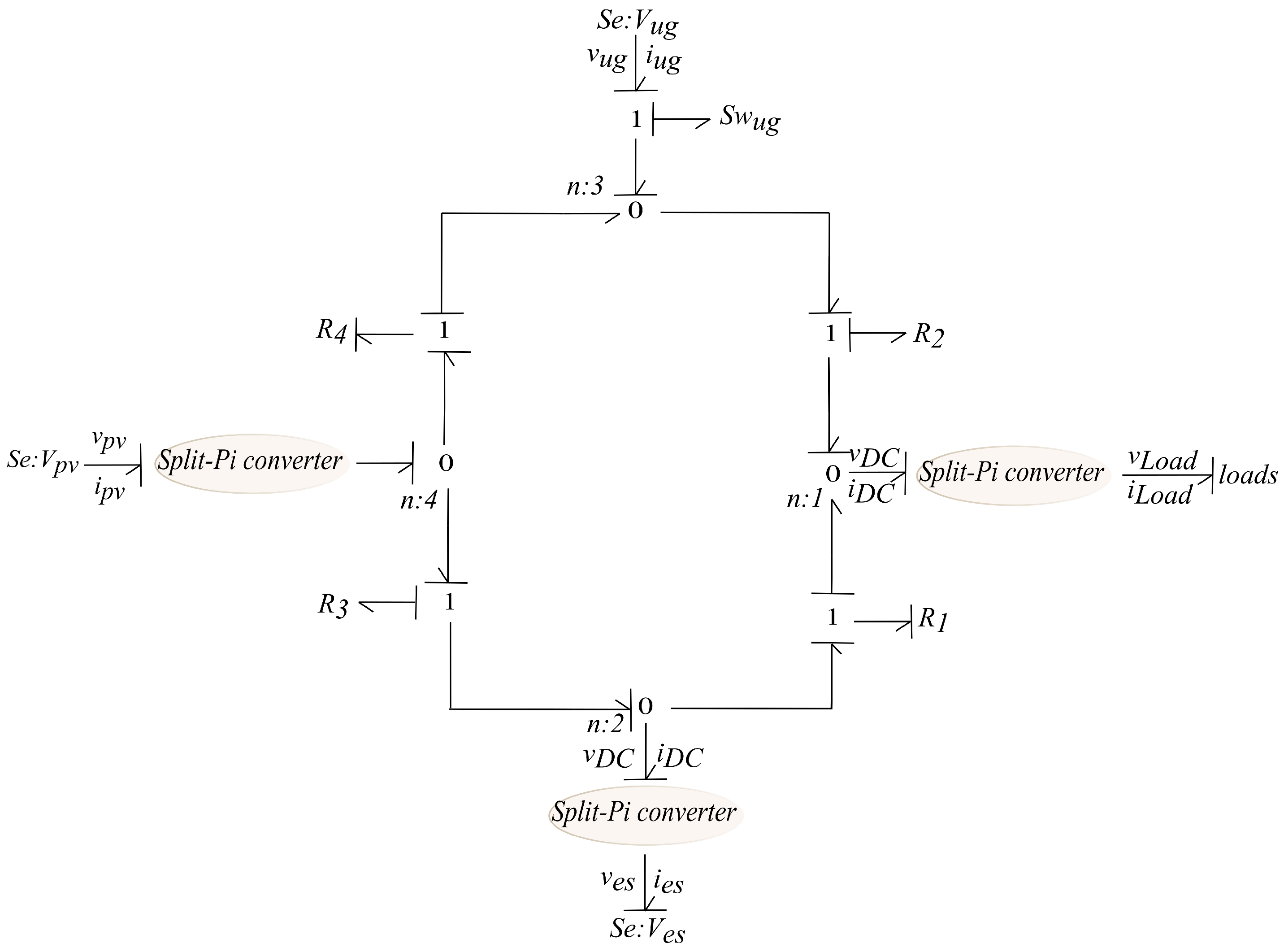
3.2. Dynamical Representation of the DC Bus
4. Optimization Objectives and Constraints
4.1. Objectives
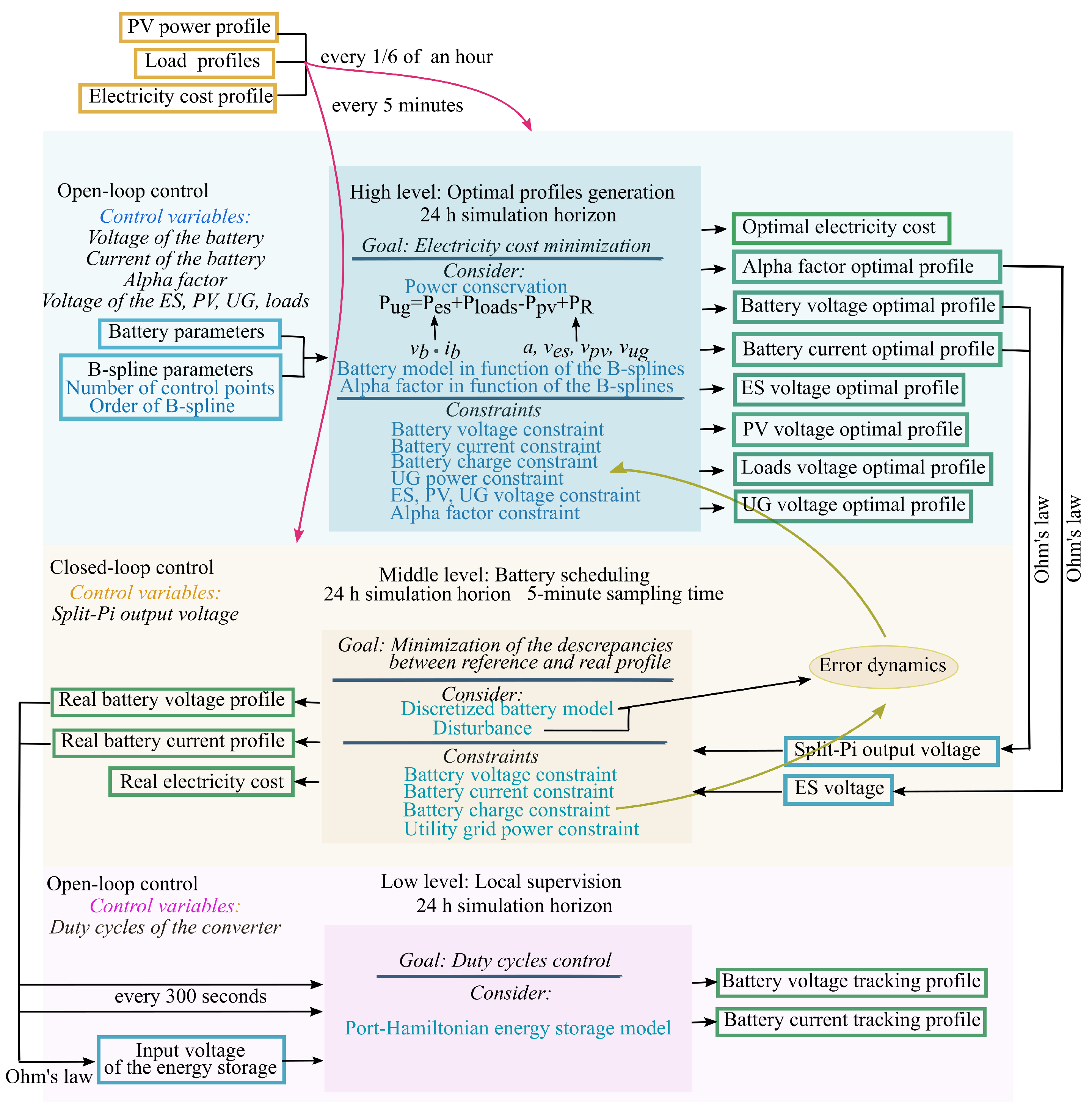
- The cost minimization, according to which the electricity cost of the UG power purchase will be penalized. The goal is to sell power to the UG, generated by the renewable resources, and to exploit the ES system towards the consumers’ benefit. The cost function which penalizes the electricity cost is written below:where reference profiles will be taken into account for the PV and the loads. The is replaced, exploiting the power conservation law (), without considering the power loss (3);
4.2. Constraints
ES System Flat Representation
5. Hierarchical Control Approach with Constrained Optimization
5.1. High Level
Definition of the Optimization Problem with the Power Loss Included
- the voltage, , on the connecting node 1 is written in function of the input voltage, , and the input current, , of the ES system:
- the constraint for the consumer’s demand is considered as follows:where is the soft constraint to relax the consumers’ demand in order to guarantee that the optimization problem will be resolvable.
5.2. Flat Representation and B-Spline Parametrization of the Optimization Problem
5.3. Middle Level
6. Simulation Results
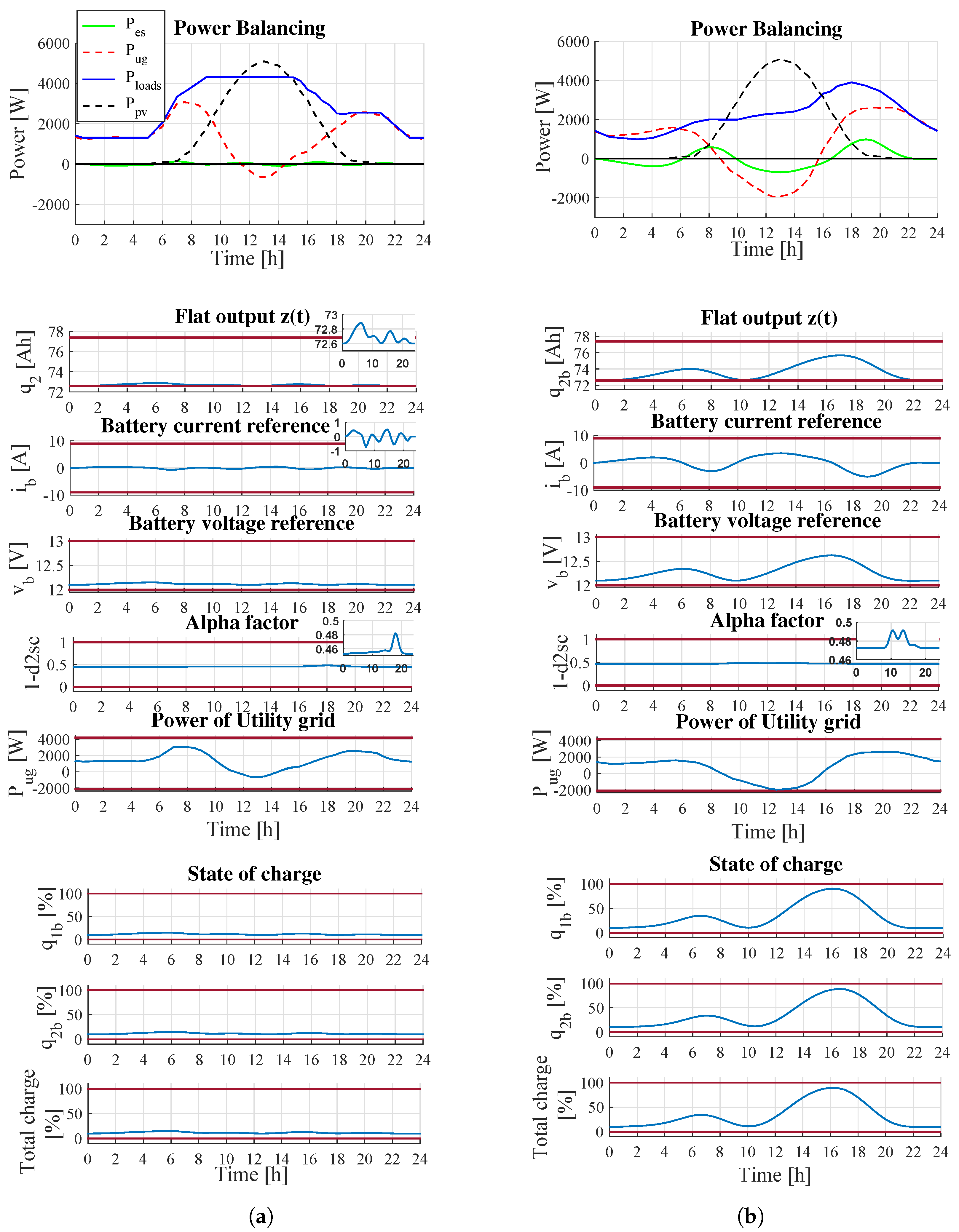
6.1. Simulation Results of the High Level
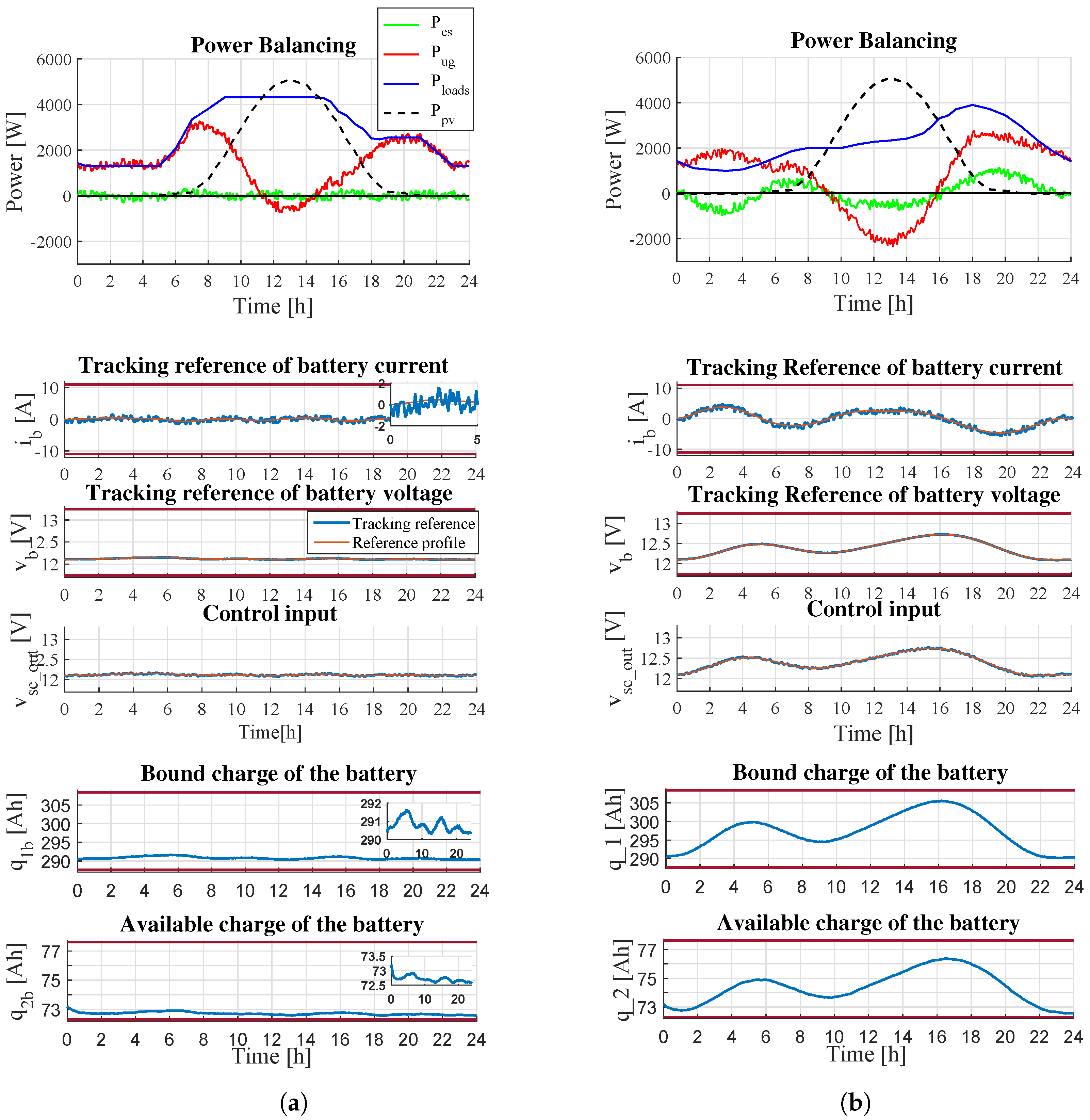
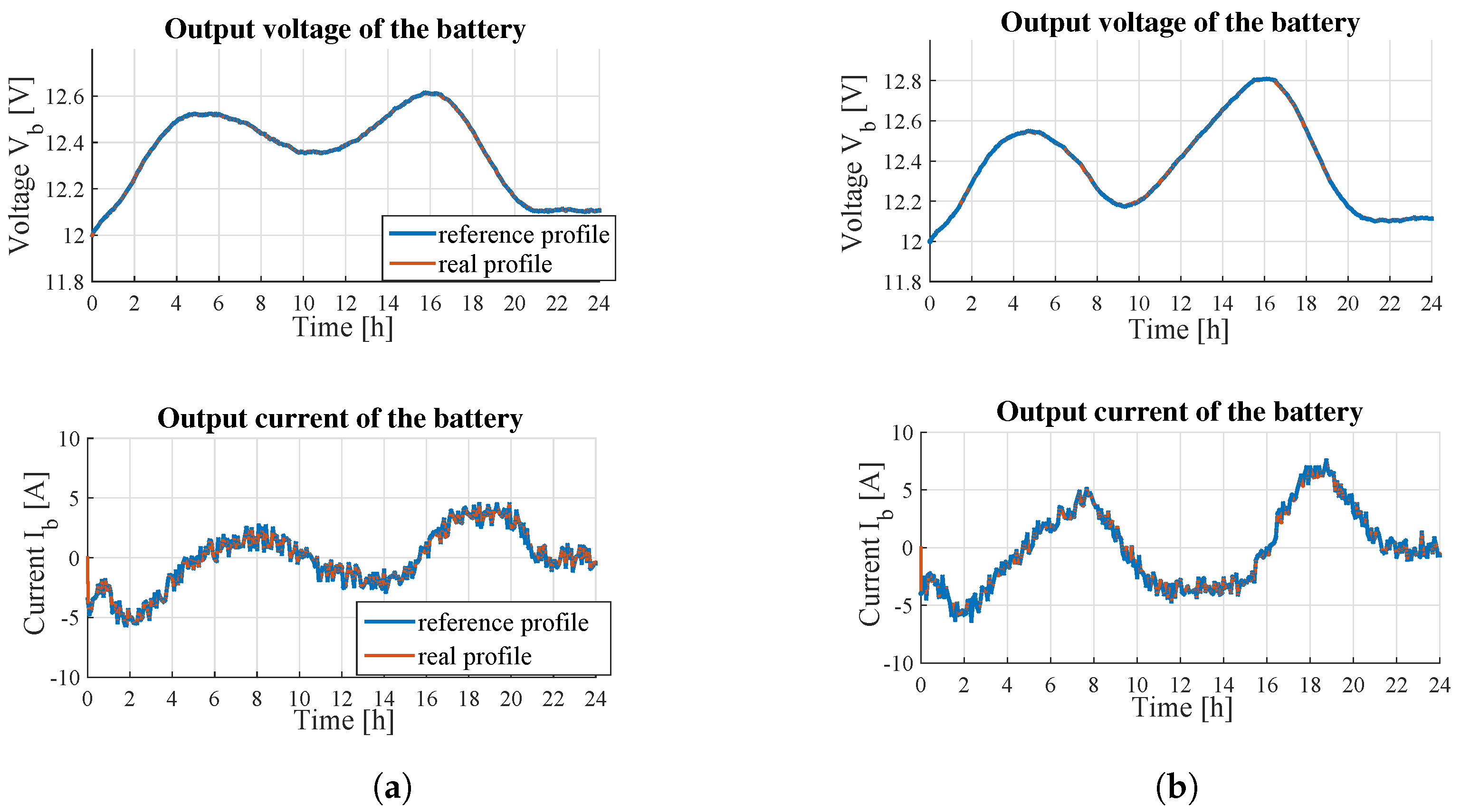
6.2. Simulation Results of the Middle and Low Level
6.3. Optimal Profile Generation of Different Scenarios
- For the CU profile, the transmission lines and are with different values lower than the and considering a greater distance between the UG and the consumers, the PV and the ES than in the previous case;
- For the DU profile, the transmission lines and are equal to 1 (as in Section 6.1) and and are equal to 3 keeping this way the renewable resource closer to the UG and the ES closer to the loads.
- , the transmission line among the loads and the UG;
- , the transmission line between the PV and the UG system.
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. B-Splines Properties
Appendix B. Supplementary Calculation for the B-Splines
References
- Roque, L.A.; Fontes, D.B.; Fontes, F.A. A Metaheuristic Approach to the Multi-Objective Unit Commitment Problem Combining Economic and Environmental Criteria. Energies 2017, 10, 2029. [Google Scholar] [CrossRef] [Green Version]
- Meng, L.; Sanseverino, E.R.; Luna, A.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Microgrid supervisory controllers and energy management systems: A literature review. Renew. Sustain. Energy Rev. 2016, 60, 1263–1273. [Google Scholar] [CrossRef]
- Ma, J.; Yuan, L.; Zhao, Z.; He, F. Transmission loss optimization-based optimal power flow strategy by hierarchical control for DC microgrids. IEEE Trans. Power Electron. 2016, 32, 1952–1963. [Google Scholar] [CrossRef]
- Gamarra, C.; Guerrero, J.M. Computational optimization techniques applied to microgrids planning: A review. Renew. Sustain. Energy Rev. 2015, 48, 413–424. [Google Scholar] [CrossRef] [Green Version]
- Iovine, A.; Siad, S.B.; Damm, G.; De Santis, E.; Di Benedetto, M.D. Nonlinear control of a DC microgrid for the integration of photovoltaic panels. IEEE Trans. Autom. Sci. Eng. 2017, 14, 524–535. [Google Scholar] [CrossRef] [Green Version]
- Wei, C.; Fadlullah, Z.M.; Kato, N.; Stojmenovic, I. On optimally reducing power loss in micro-grids with power storage devices. IEEE J. Sel. Areas Commun. 2014, 32, 1361–1370. [Google Scholar] [CrossRef]
- Feng, K.; Liu, C.; Song, Z. Hour-ahead energy trading management with demand forecasting in microgrid considering power flow constraints. Energies 2019, 12, 3494. [Google Scholar] [CrossRef] [Green Version]
- Nahata, P.; La Bella, A.; Scattolini, R.; Ferrari-Trecate, G. Hierarchical Control in Islanded DC Microgrids with Flexible Structures. arXiv 2019, arXiv:1910.05107. [Google Scholar]
- Vazquez, N.; Yu, S.S.; Chau, T.K.; Fernando, T.; Iu, H.H.C. A Fully Decentralized Adaptive Droop Optimization Strategy for Power Loss Minimization in Microgrids With PV-BESS. IEEE Trans. Energy Convers. 2018, 34, 385–395. [Google Scholar] [CrossRef]
- Sanseverino, E.; Di Silvestre, M.; Badalamenti, R.; Nguyen, N.; Guerrero, J.; Meng, L. Optimal power flow in islanded microgrids using a simple distributed algorithm. Energies 2015, 8, 11493–11514. [Google Scholar] [CrossRef] [Green Version]
- Mutarraf, M.; Terriche, Y.; Niazi, K.; Vasquez, J.; Guerrero, J. Energy Storage Systems for Shipboard Microgrids—A Review. Energies 2018, 11, 3492. [Google Scholar] [CrossRef] [Green Version]
- Zafeiratou, I.; Prodan, I.; Lefèvre, L.; Piétrac, L. Meshed DC microgrid hierarchical control: A differential flatness approach. Electr. Power Syst. Res. 2020, 180, 106–133. [Google Scholar] [CrossRef]
- Zafeiratou, I.; Prodan, I.; Boem, F.; Lefèvre, L. Handling power losses in a DC microgrid through constrained optimization. In Proceedings of the 21st World Congress, Berlin, Germany, 12–17 July 2020. [Google Scholar]
- Fliess, M.; Lévine, J.; Martin, P.; Rouchon, P. Differential flatness and defect: An overview. In Workshop on Geometry in Nonlinear Control; Banach Center Publications: Warsaw, Poland, 1993. [Google Scholar]
- Lyche, T.; Manni, C.; Speleers, H. Foundations of spline theory: B-splines, spline approximation, and hierarchical refinement. In Splines and PDEs: From Approximation Theory to Numerical Linear Algebra; Springer: Berlin/Heidelberg, Germany, 2018; pp. 1–76. [Google Scholar]
- Prodan, I.; Stoican, F.; Louembet, C. Necessary and sufficient LMI conditions for constraints satisfaction within a B-spline framework. In Proceedings of the 2019 IEEE 58th Conference on Decision and Control (CDC), Nice, France, 11–13 December 2019; pp. 8061–8066. [Google Scholar]
- Zafeiratou, I.; Prodan, I.; Lefèvre, L.; Piétrac, L. Dynamical modelling of a DC microgrid using a port-Hamiltonian formalism. IFAC-PapersOnLine 2018, 51, 469–474. [Google Scholar] [CrossRef]
- Cook, M.D.; Trinklein, E.H.; Parker, G.G.; Robinett, R.D.; Weaver, W.W. Optimal and Decentralized Control Strategies for Inverter-Based AC Microgrids. Energies 2019, 12, 3529. [Google Scholar] [CrossRef] [Green Version]
- Duindam, V.; Macchelli, A.; Stramigioli, S.; Bruyninckx, H. Modeling and Control of Complex Physical Systems: The Port-Hamiltonian Approach; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Paynter, H.M. Analysis and Design of Engineering Systems; MIT Press: Cambridge, MA, USA, 1961. [Google Scholar]
- Karnopp, D.C.; Margolis, D.L.; Rosenberg, R.C. System Dynamics: Modeling, Simulation, and Control of Mechatronic Systems; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Suryawan, F. Constrained Trajectory Generation and Fault Tolerant Control Based on Differential Flatness and B-Splines. Ph.D. Thesis, School of Electrical Engineering and Computer Science, The University of Newcastle, Callaghan, Australia, 2012. [Google Scholar]
- Löfberg, J. YALMIP: A toolbox for modeling and optimization in MATLAB. In Proceedings of the CACSD Conference, Taipei, Taiwan, 2–4 September 2004; Volume 3. [Google Scholar]
- Biegler, L.T.; Zavala, V.M. Large-scale nonlinear programming using IPOPT: An integrating framework for enterprise-wide dynamic optimization. Comput. Chem. Eng. 2009, 33, 575–582. [Google Scholar] [CrossRef]
- van der Schaft, A.; Jeltsema, D. Port-Hamiltonian systems theory: An introductory overview. Found. Trends Syst. Control 2014, 1, 173–378. [Google Scholar] [CrossRef]
- Boem, F.; Ferrari, R.M.; Keliris, C.; Parisini, T.; Polycarpou, M.M. A distributed networked approach for fault detection of large-scale systems. IEEE Trans. Autom. Control 2016, 62, 18–33. [Google Scholar] [CrossRef] [Green Version]
- Stoican, F.; Prodan, I.; Popescu, D.; Ichim, L. Constrained trajectory generation for UAV systems using a B-spline parametrization. In Proceedings of the 2017 25th Mediterranean Conference on Control and Automation (MED), IEEE, Valletta, Malta, 3–6 July 2017; pp. 613–618. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Values | Units |
|---|---|---|
| , | 1, , | [] |
| , | , | [H] |
| , , | , , | [F] |
| , | , | [F] |
| , , , | 1 | [] |
| Variable | Values | Units | |
|---|---|---|---|
| N as in (30a) (30b), (36) | 27 | ||
| High level | as in (30a) (30b), (36) | 18 | |
| as in (25) | 4 | ||
| 12 | [V] | ||
| [A] | |||
| Constraints | [Ah] | ||
| [Ah] | |||
| [W] | |||
| [V] | |||
| as in (39a) | 5 | [h] | |
| Middle level | as in (39a) | ||
| as in (39a) | 800 | ||
| [V] | |||
| [A] | |||
| Constraints | [Ah] | ||
| [Ah] | |||
| [W] | |||
| [V] |
| Load | Power | Generated Power [%] | Consumed Power [%] | Electricity Cost [Euros] |
|---|---|---|---|---|
| CU | 49.91% | 1.78% sold to the UG | 4.318 | |
| 0.79% | 0.76% for battery charging | - | ||
| 49.30% | - | - | ||
| - | 96.9% for the consumers | - | ||
| - | Total: 0.56% : 0.12%, 0.24%, 0.11%, 0.09% | - | ||
| DU | 42.14% | 13% sold to the UG | 2.713 | |
| 6.58% | 6.7% for battery charging | - | ||
| 51.28% | - | - | ||
| - | 79.66% for the consumers | - | ||
| - | Total: 0.64% : 0.12%, 0.21%, 0.13%, 0.18% | - |
| Load Profile | Power | Generated Power [%] | Consumed Power [%] | Generated Power Difference from High Level [%] | Consumed Power Difference from High Level [%] |
|---|---|---|---|---|---|
| CU | 49.24% | 1.85% sold to the UG | −0.62% | 0.07% | |
| 2.08% | 1.84% for battery charging | 1.29% | 1.05% | ||
| 48.68% | - | −0.62% | - | ||
| - | 94.74% for the consumers | - | 0.75% | ||
| - | 1.57% | - | 1.01% | ||
| DU | 41.27% | 13.15% sold to the UG | −0.87% | 0.08% | |
| 7.95% | 7.73% for battery charging | 1.37% | 0.97% | ||
| 50.78% | - | −0.5% | - | ||
| - | 77.71% for the consumers | - | −1.05% | ||
| - | 1.41% | - | 0.77% |
| Load | Resistors | Value | Unit |
|---|---|---|---|
| Commercial | 0.5 | [] | |
| 5 | [] | ||
| 5 | [] | ||
| 0.2 | [] | ||
| Domestic | , | 1 | [] |
| , | 3 | [] |
| Load | Power | Generated Power [%] | Consumed Power [%] | Electricity Cost (Euros) |
|---|---|---|---|---|
| CU | 51.2% | 1.9% sold to the UG | 4.623 | |
| 1.9% | 2% for battery charging | - | ||
| - | 92% for the consumers | - | ||
| 46.9% | - | - | ||
| - | Total: 4.1% : 0.19%, 2.1%, 1.76%, 0.05% | - | ||
| DU | 44% | 13.1% sold to the UG | 2.857 | |
| 6% | 6.7% for battery charging | - | ||
| - | 78.1% for the consumers | - | ||
| 50% | - | - | ||
| - | Total: 2.1% : 0.2%, 0.9%, 0.6%, 0.4% | - |
| Load | Power | Generated Power [%] | Consumed Power [%] | Electricity Cost (Euros) |
|---|---|---|---|---|
| = 0 | 43% | 13.1% sold to the UG | 2.881 | |
| 6.8% | 6.8% for battery charging | - | ||
| - | 77.5% for the consumers | - | ||
| 50.2% | - | - | ||
| - | Total: 2.6% : 1.09%, 0%, 0.98%, 0.53% | - | ||
| = 0 | 43.7% | 13.6% sold to the UG | 2.765 | |
| 3.7% | 3.7% for battery charging | - | ||
| - | 80% for the consumers | - | ||
| 52.6% | - | - | ||
| - | Total: 2.7% : 0.98%, 0.61%, 1.11%, 0% | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zafeiratou, I.; Prodan, I.; Lefévre, L. A Hierarchical Control Approach for Power Loss Minimization and Optimal Power Flow within a Meshed DC Microgrid. Energies 2021, 14, 4846. https://doi.org/10.3390/en14164846
Zafeiratou I, Prodan I, Lefévre L. A Hierarchical Control Approach for Power Loss Minimization and Optimal Power Flow within a Meshed DC Microgrid. Energies. 2021; 14(16):4846. https://doi.org/10.3390/en14164846
Chicago/Turabian StyleZafeiratou, Igyso, Ionela Prodan, and Laurent Lefévre. 2021. "A Hierarchical Control Approach for Power Loss Minimization and Optimal Power Flow within a Meshed DC Microgrid" Energies 14, no. 16: 4846. https://doi.org/10.3390/en14164846
APA StyleZafeiratou, I., Prodan, I., & Lefévre, L. (2021). A Hierarchical Control Approach for Power Loss Minimization and Optimal Power Flow within a Meshed DC Microgrid. Energies, 14(16), 4846. https://doi.org/10.3390/en14164846