
Water Cycle Algorithm Optimized Type II Fuzzy Controller for Load Frequency Control of a Multi-Area, Multi-Fuel System with Communication Time Delays

 ,
,  ,
,  ,
, 
 and
and 
Abstract
:1. Introduction
- (a)
- The performance of the WCA-optimized T2-FPID controller is assessed for LFC study.
- (b)
- The efficacy of the proposed WCA-tuned T2-FPID controller is revealed with other control approaches reported in the literature by implementing test system 1.
- (c)
- Impact of CTDs on the MATHN system is revealed and the importance of considering CTDs is discussed extensively.
- (d)
- A UPFC-SMES additional strategy is implemented to further improve system performance.
- (e)
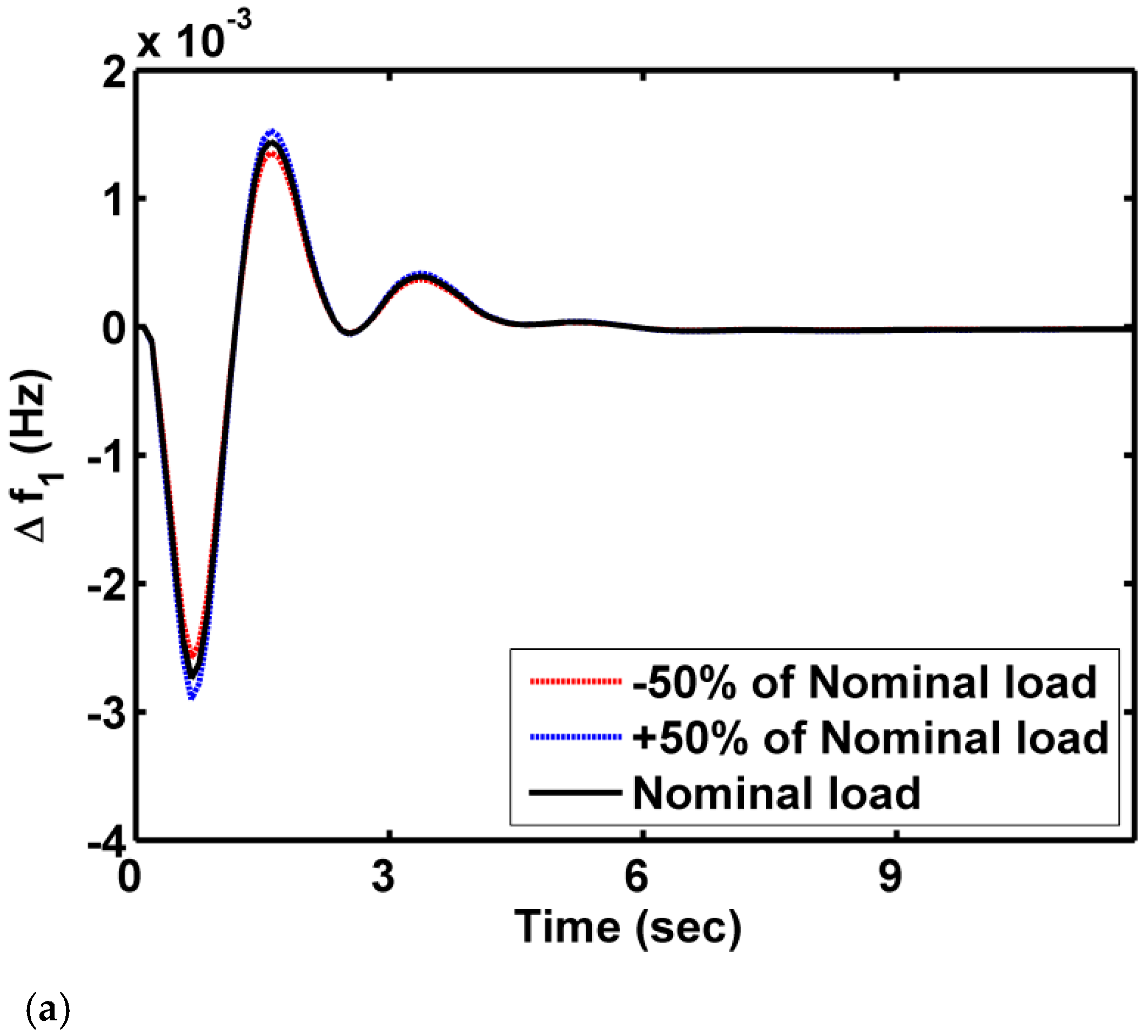
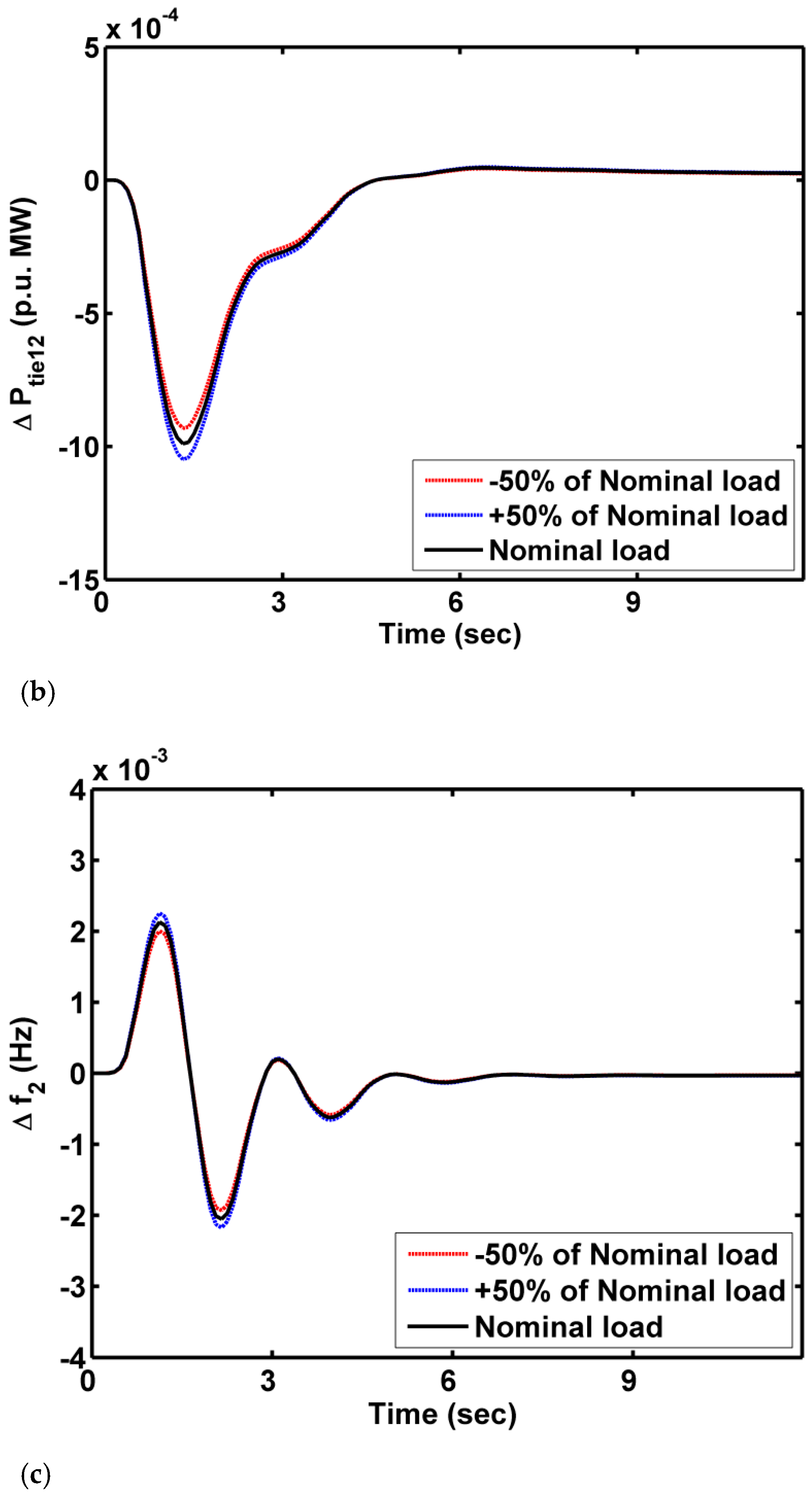
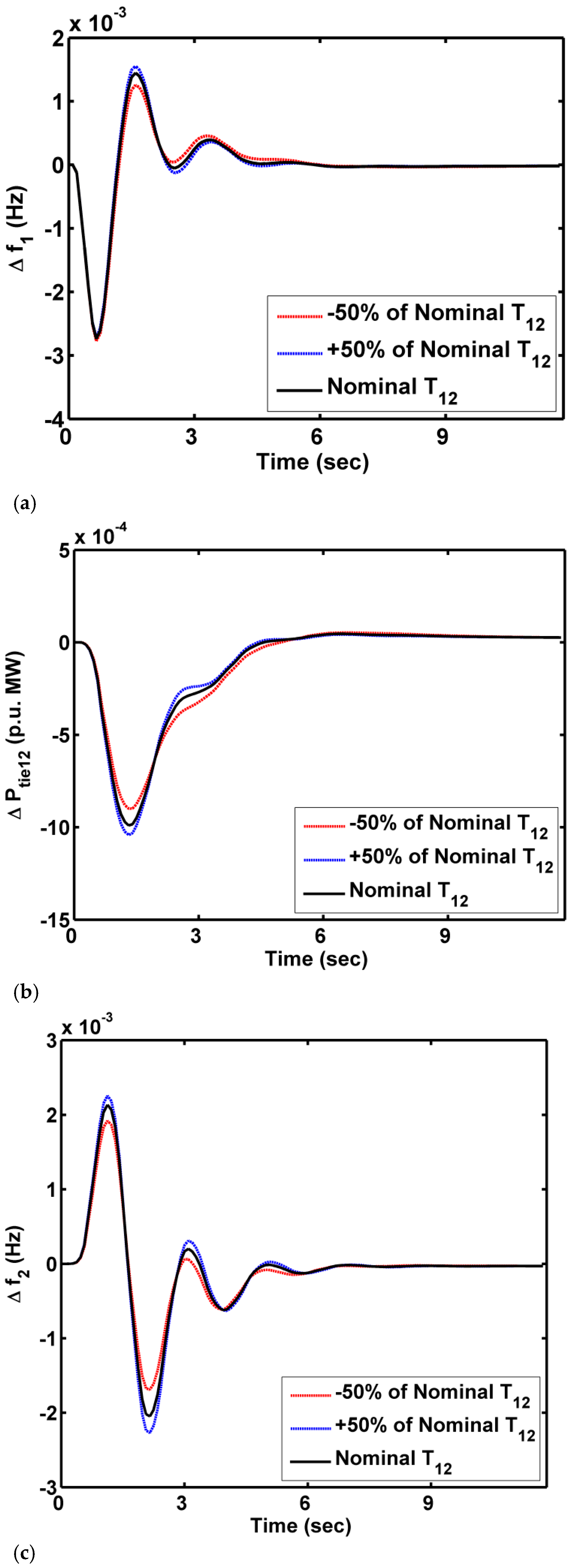
- Sensitivity analysis is performed to showcase the presented coordinated regulation robustness.
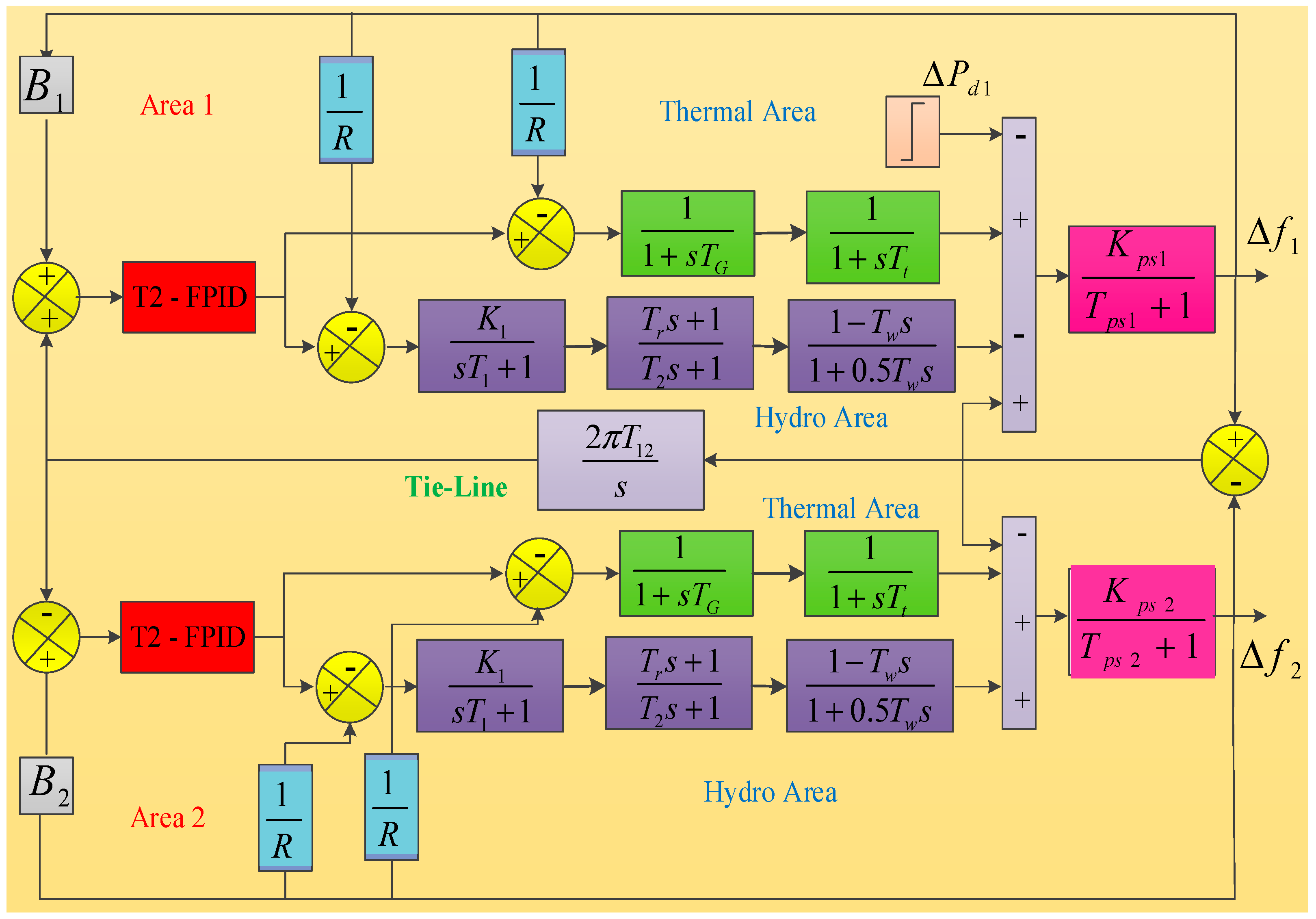
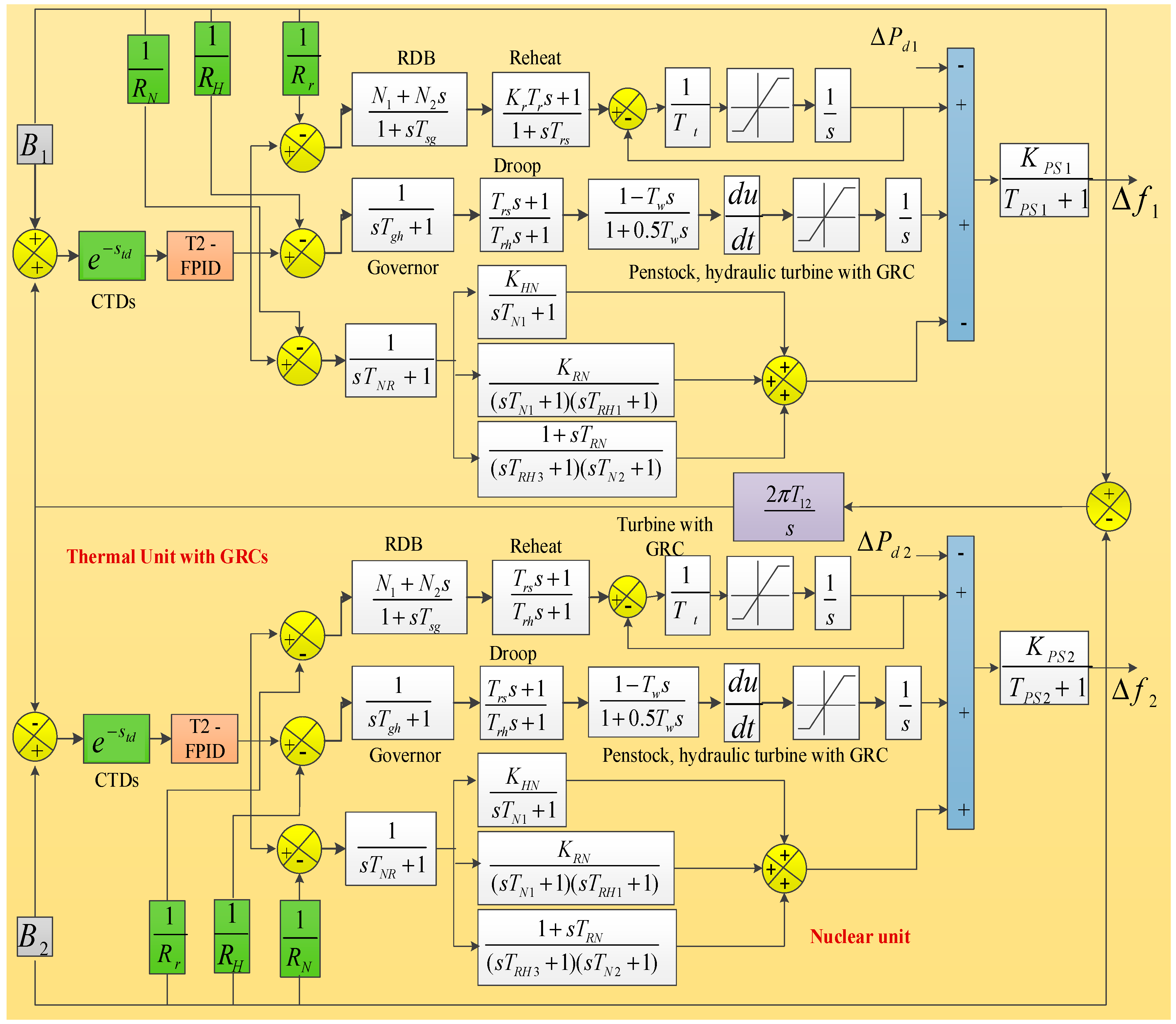
2. Materials and Methods
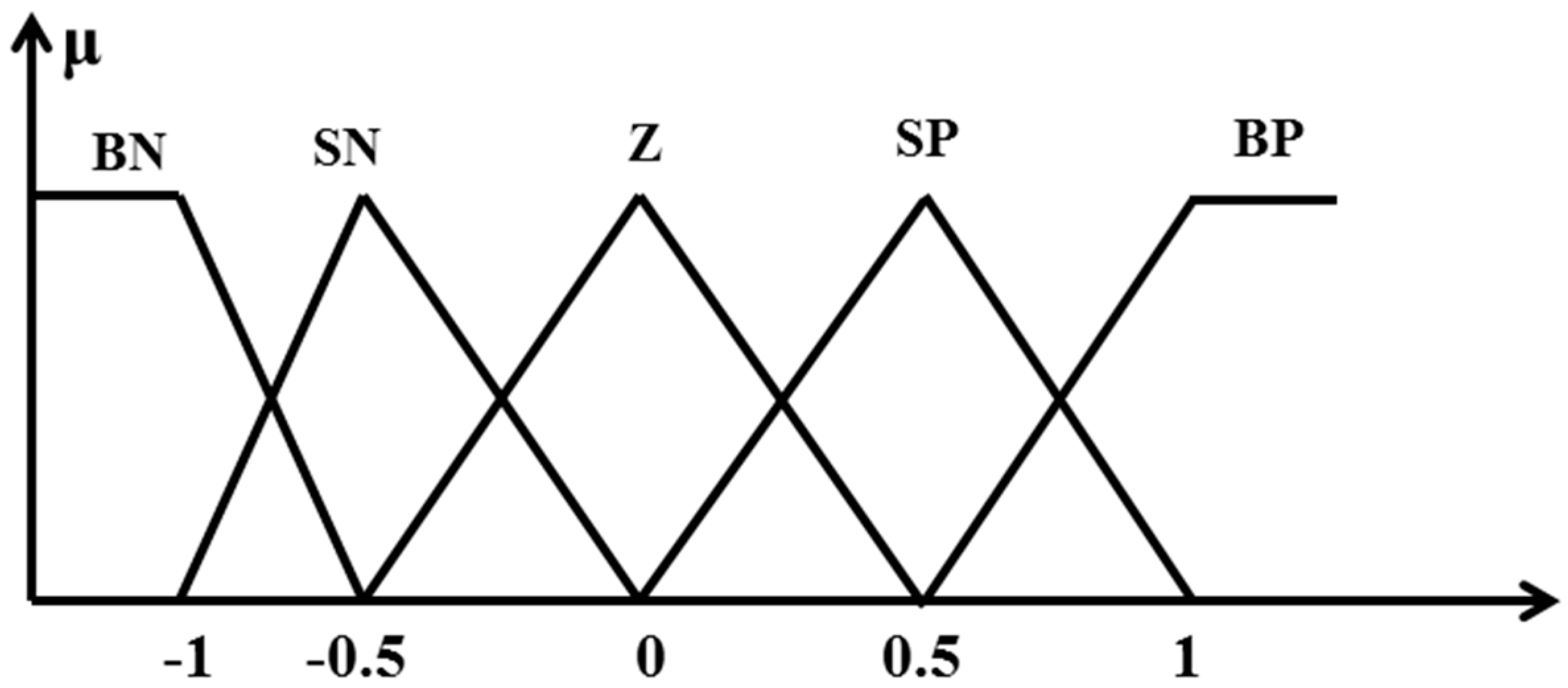
3. Type II Fuzzy Controller
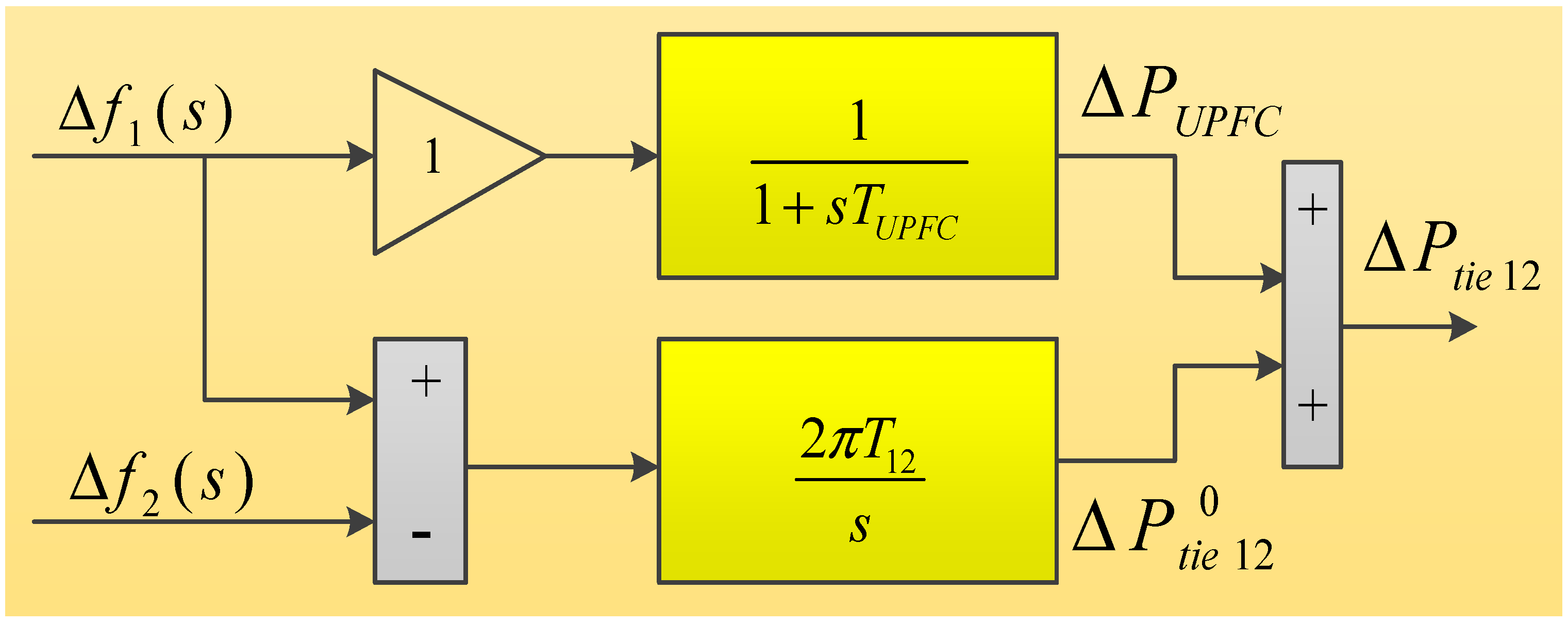
4. Territorial Strategy of the SMES-UPFC
4.1. UPFC
4.2. SMES
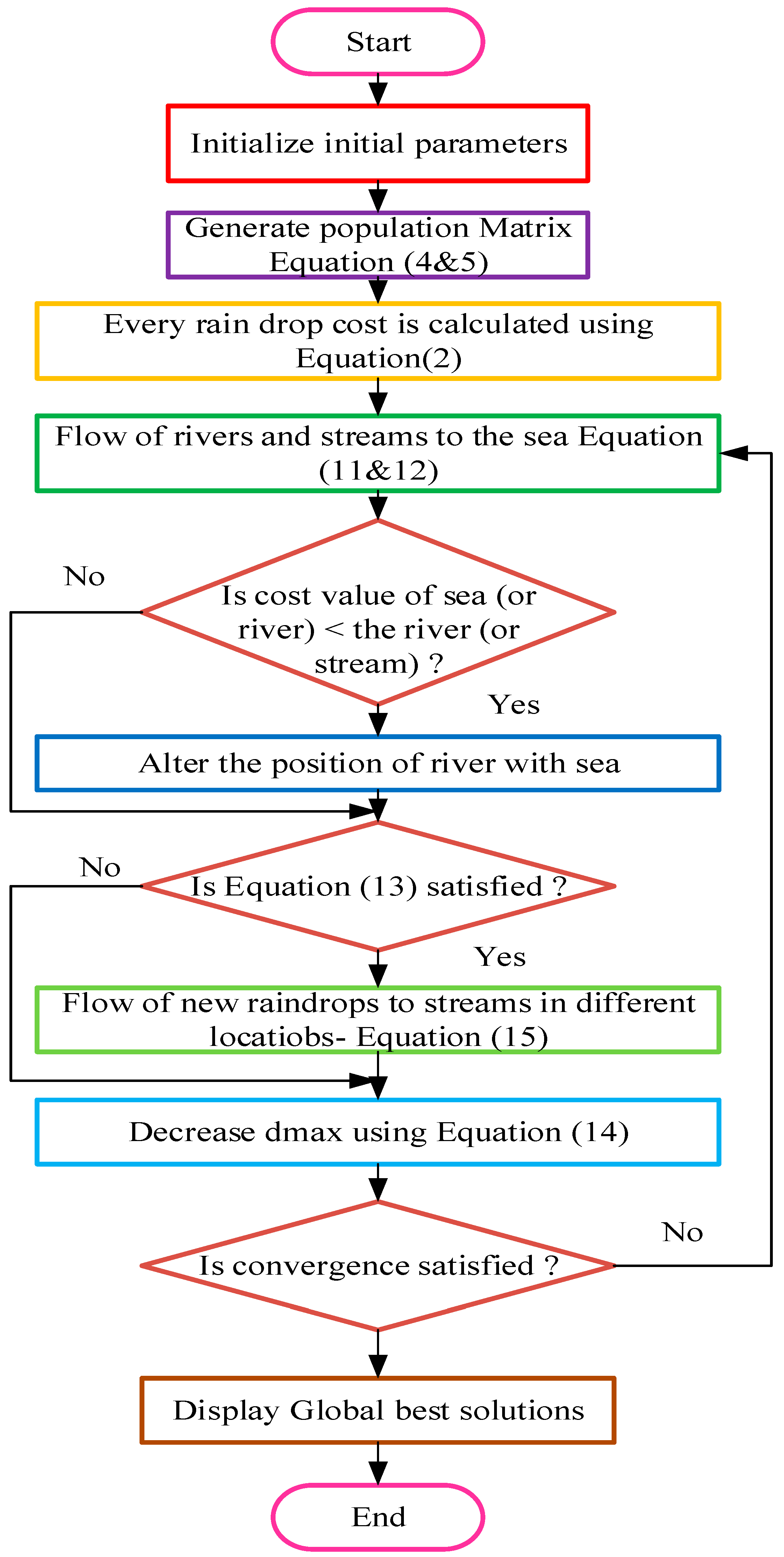
5. Water Cycle Algorithm
5.1. Streams Flow into the River or Rivers Flow into the Sea
5.2. Evaporation and Rain
6. Results and Discussion
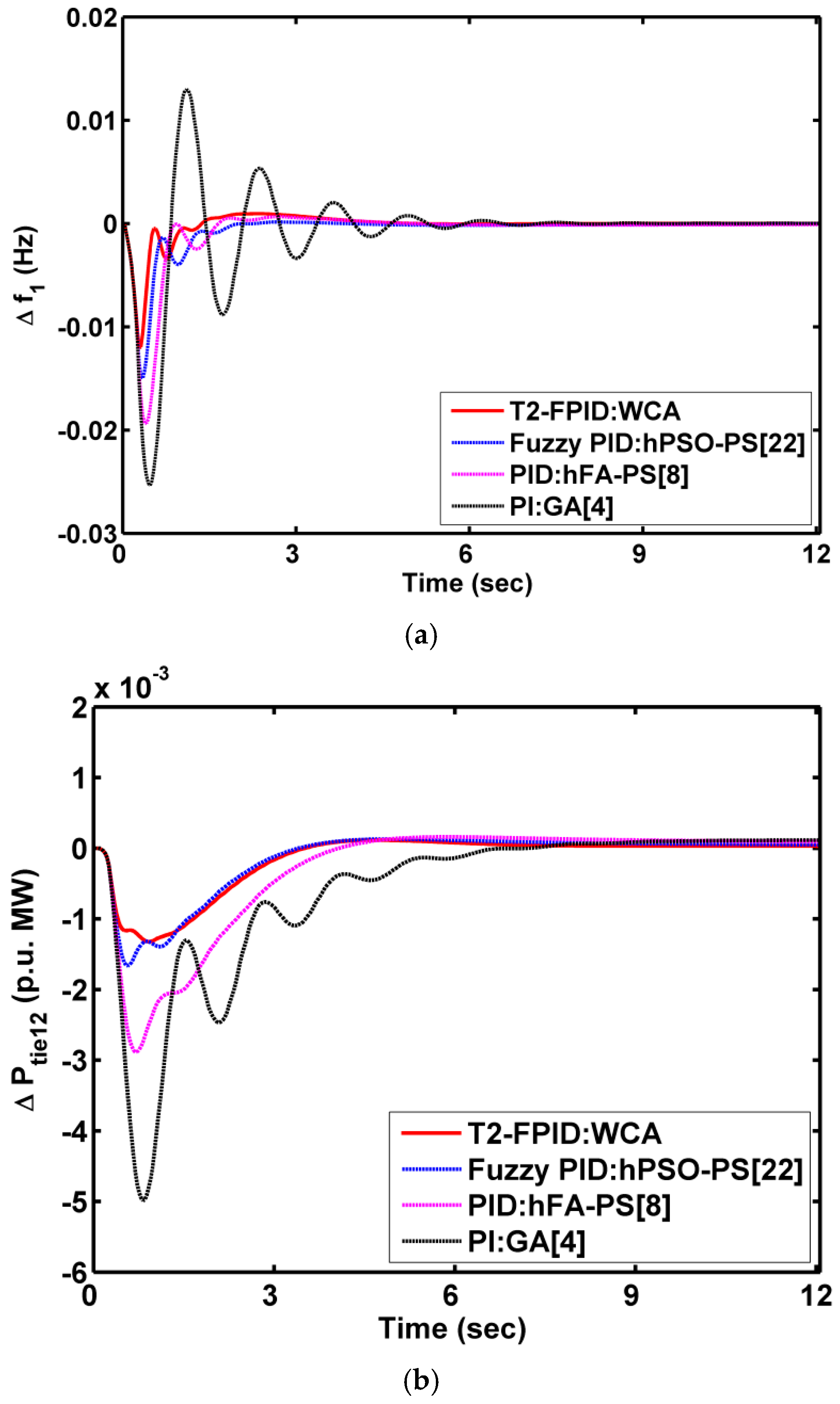
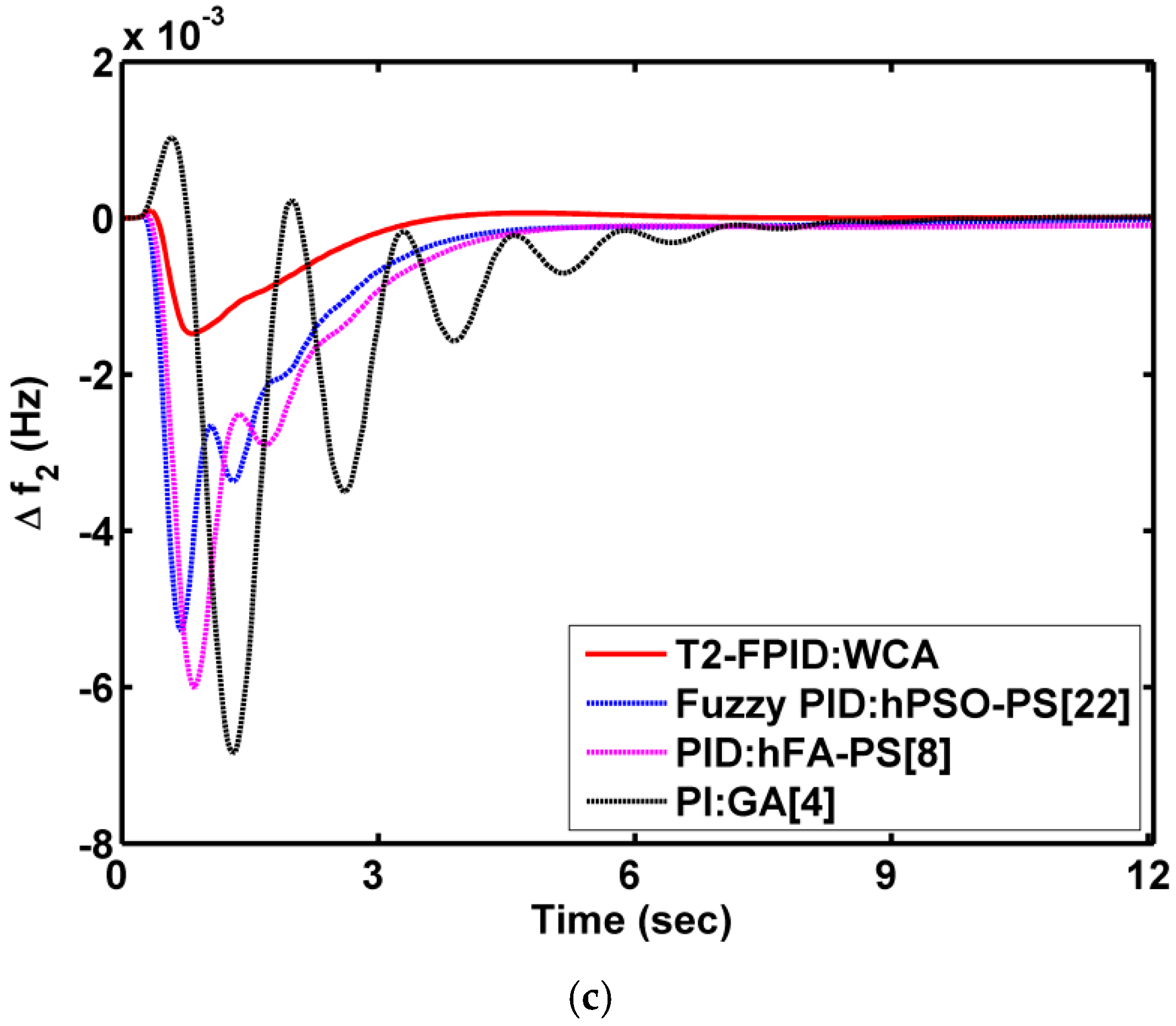
6.1. Case 1: Performance Analysis of Test System 1
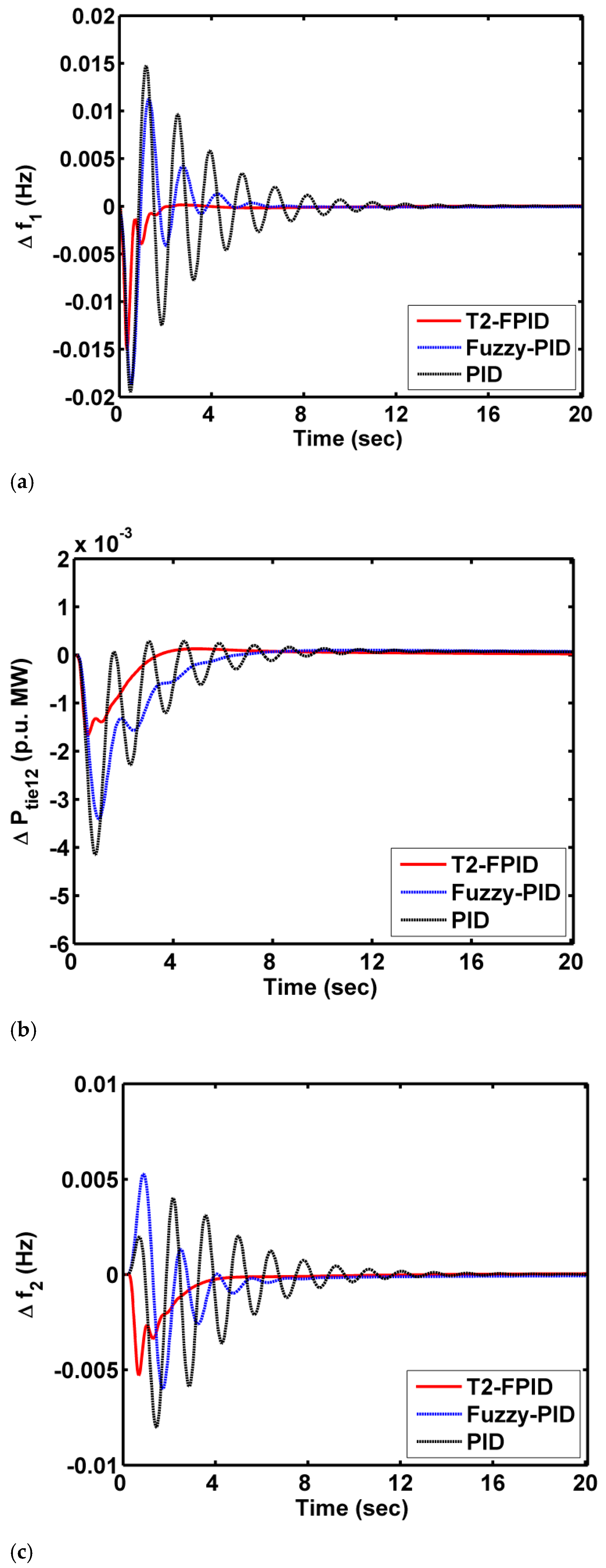
6.2. Case 2: Performance Analysis of Test System 2 without CTD Consideration
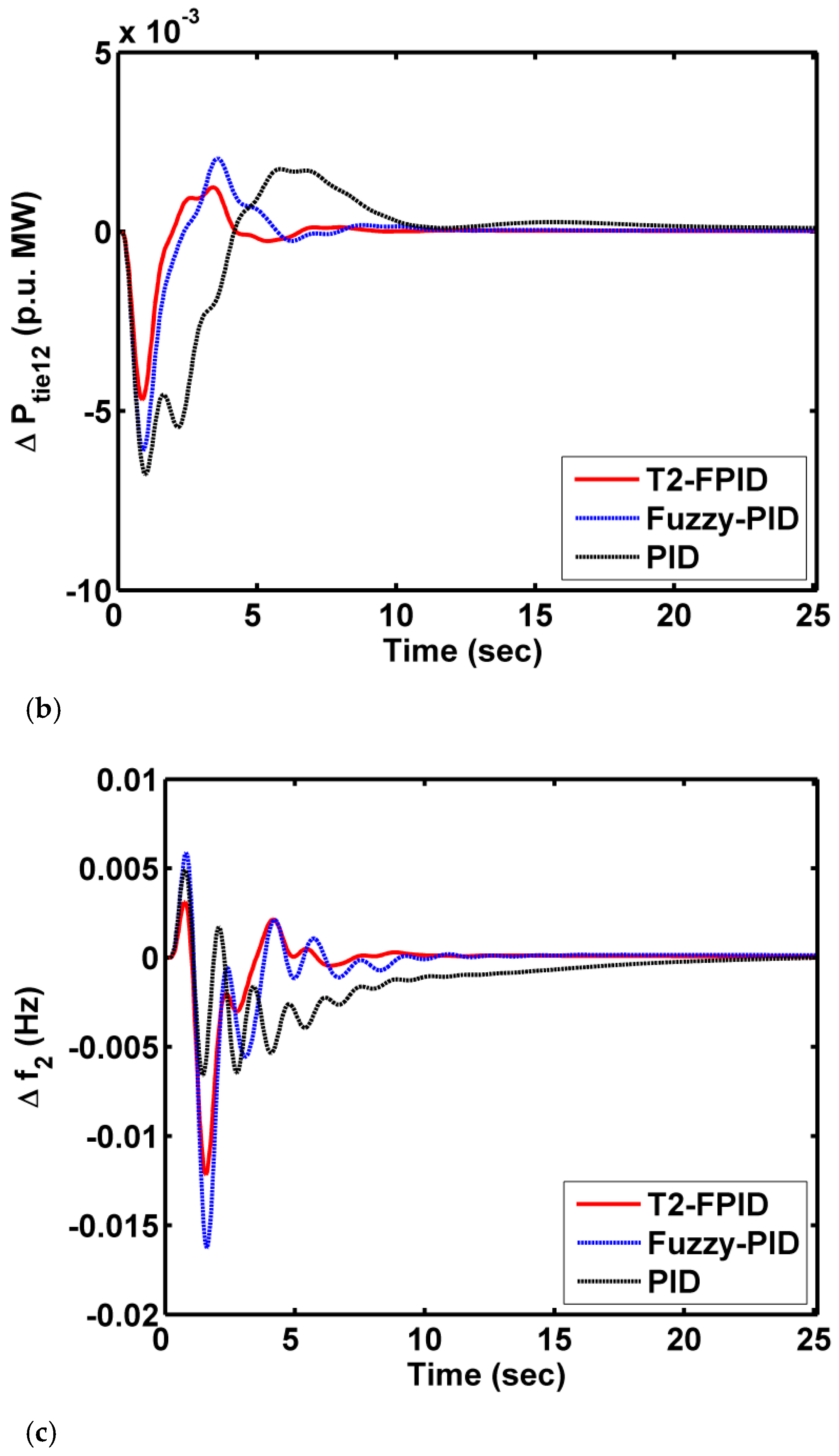
6.3. Case 3: Performance Analysis of Test System 2 with CTD Consideration
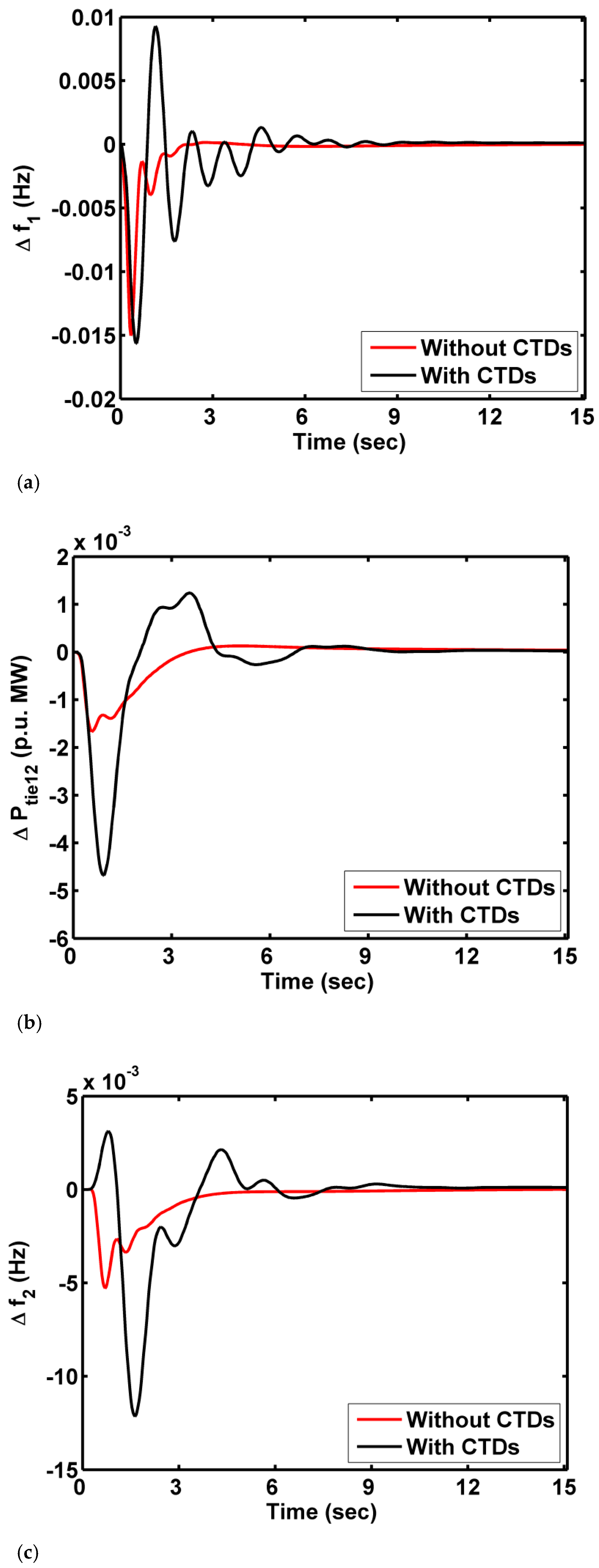
6.4. Case 4: Demonstrating the Impact of CTDs on Test System 2
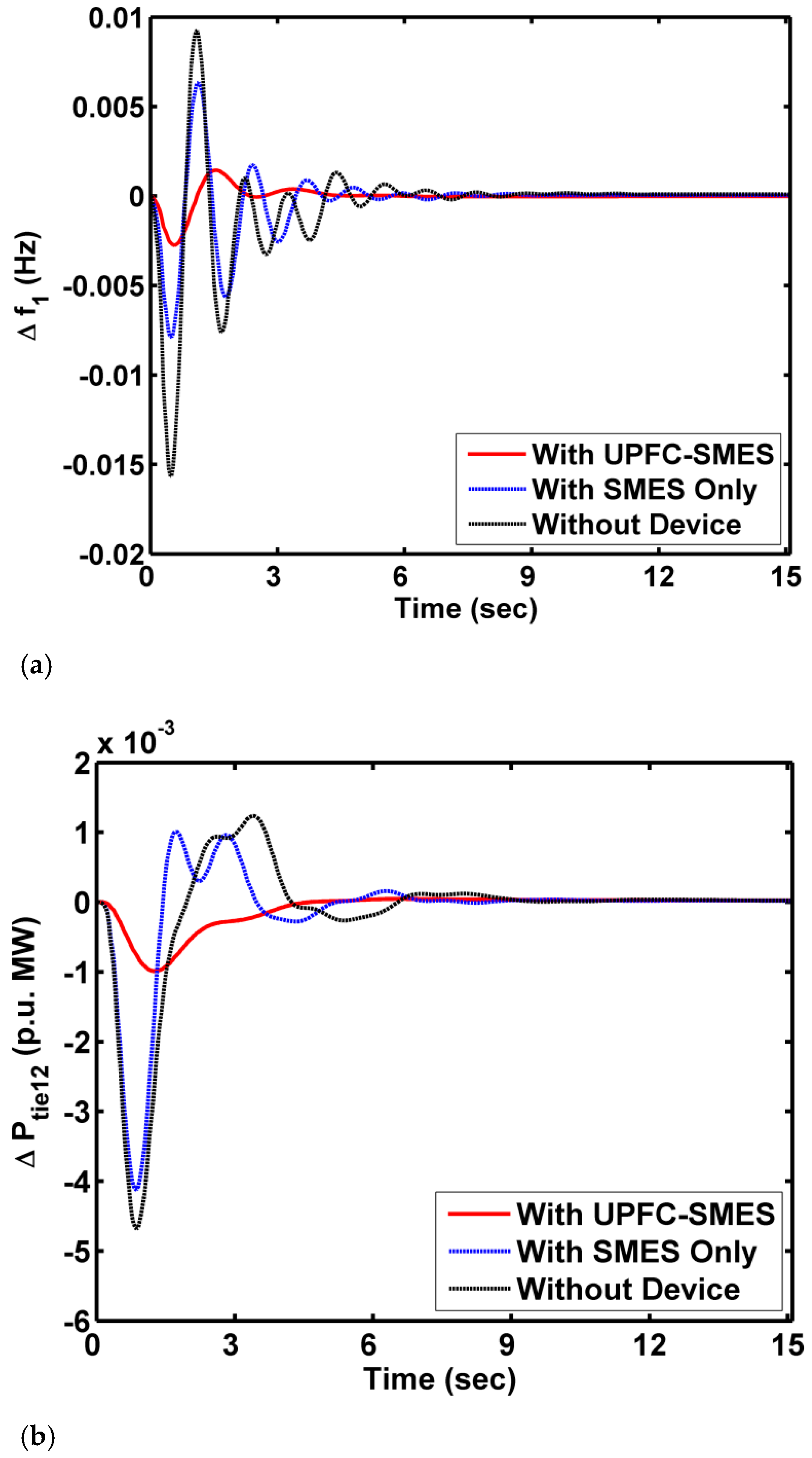
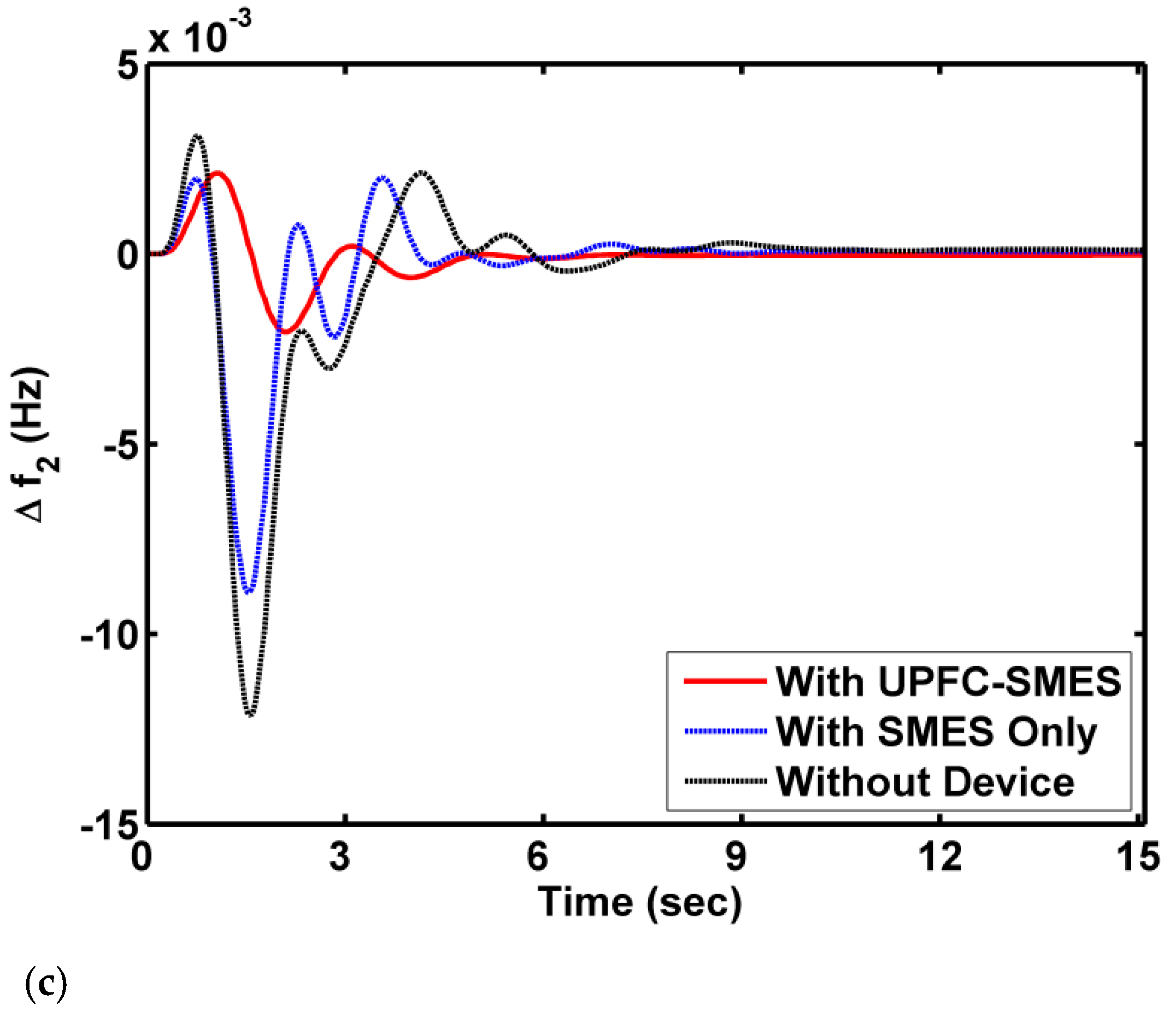
6.5. Case 5: Performance Assessment of the UPFC-SMES on Test System 2
6.6. Case 6: Sensitivity Analysis
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CTD | Communication time delay |
| DAHT | Dual-area hydro-thermal |
| DOF | Degree of freedom |
| ESDs | Energy storage devices |
| FLC | Fuzzy logic controller |
| GSA | Gravitational search algorithm |
| GRC | Generation rate constraint |
| GWO | Gray wolf optimizer |
| HAEFA | Hybrid artificial field algorithm |
| ITAE | Integral time area error |
| LFC | Load frequency controller |
| MFs | Membership functions |
| FO | Fractional order |
| MATHN | Multi-area thermal-hydro-nuclear |
| PS | Pattern search |
| T2-FPID | Type II fuzzy PID |
| SMES | Superconducting magnetic energy storage |
| SR | Secondary regulator |
| PSO | Particle swarm optimization |
| SLP | Step load perturbation |
| GDB | Governor dead band |
| WCA | Water cycle algorithm |
| UPFC | Unified power flow controller |
Appendix A
References
- Tungadio, D.H.; Sun, Y. Load frequency controllers considering renewable energy integration in power system. Energy Rep. 2019, 5, 436–454. [Google Scholar] [CrossRef]
- Elgerd, O.I.; Fosha, C.E. Optimum mega-watt frequency control of multi-area electric energy systems. IEEE Trans. Power Appl. Syst. 1970, 89, 556–563. [Google Scholar] [CrossRef]
- Nanda, J.; Mishra, S.; Saikia, L.C. Maiden application of bacterial foraging based optimization technique in multi-area automatic generation control. IEEE Trans Power Syst. 2009, 24, 602–609. [Google Scholar] [CrossRef]
- Chandrakala, K.R.M.V.; Balamurugan, S.; Sankaranarayanan, K. Variable structure fuzzy gain scheduling based load frequency controller for multi-source multi area hydro thermal system. Int. J. Electr. Power Energy Syst. 2013, 53, 375–381. [Google Scholar] [CrossRef]
- Shankar, R.; Kalyan, C.; Ravi, B. Impact of energy storage system on load frequency control for diverse sources of interconnected power system in deregulated power environment. Int. J. Electr. Power Energy Syst. 2016, 79, 11–26. [Google Scholar] [CrossRef]
- Guha, D.; Roy, P.K.; Banerjee, S. Load frequency control of large scale power system using quasi-oppositional grey wolf optimization algorithm. Eng. Sci. Technol. Int. J. 2016, 19, 1693–1713. [Google Scholar] [CrossRef] [Green Version]
- Naga, C.S.K.; Sambasivarao, G. Frequency and voltage stabilization in combined load frequency control and automatic voltage regulation of multi area system with hybrid generation utilities by AC/DC links. Int. J. Sustain. Energy 2020, 39, 1009–1029. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Padhan, S. A hybrid firefly algorithm and pattern search technique for automatic generation control of multi area power systems. Int. J. Electr. Power Energy Syst. 2015, 64, 9–23. [Google Scholar] [CrossRef]
- Raju, M.; Saikia, L.C.; Sinha, N. Automatic generation control of a multi-area system using ant lion optimizer algorithm based PID plus second order derivative controller. Int. J. Electr. Power Energy Syst. 2016, 80, 52–63. [Google Scholar] [CrossRef]
- Nosratabadi, S.M.; Bornapour, M.; Gharaei, M.A. Grasshopper optimization algorithm for optimal load frequency control considering predictive functional modified PID controller in restructured multi-resource multi-area power system with redox flow battery units. Control Eng. Pract. 2019, 89, 204–227. [Google Scholar] [CrossRef]
- Rahman, A.; Saikia, L.C.; Sinha, N. Automatic generation control of an unequal four-area thermal system using biogeography based optimized 3DOF-PID controller. IET Gener. Transm. Distrib. 2016, 10, 4118–4129. [Google Scholar] [CrossRef]
- Pradhan, P.C.; Sahu, R.K.; Panda, S. Firefly algorithm optimized fuzzy PID controller for AGC of multi-area multi-source power systems with UPFC and SMES. Eng. Sci. Technol. Int. J. 2016, 19, 338–354. [Google Scholar] [CrossRef] [Green Version]
- Tasnin, W.; Saikia, L.C. Comparative performance of different energy storage devices in AGC of multi-source system including geothermal power plant. J. Renew. Sustain. Energy 2018, 10, 024101. [Google Scholar] [CrossRef]
- Arya, Y. A new optimized fuzzy FOPI-FOPD controller for automatic generation control of electric power systems. J. Frankl. Inst. 2019, 356, 5611–5629. [Google Scholar] [CrossRef]
- Nayak, J.R.; Shaw, B.; Sahu, B.K. Application of adaptive SOS (ASOS) algorithm based interval type-2 fuzzy-PID controller with derivative filter for automatic generation control of an interconnected power system. Eng. Sci. Technol. Int. J. 2018, 21, 465–485. [Google Scholar] [CrossRef]
- Naga, C.S.K.; Sambasivarao, G. Coordinated SMES and TCSC damping controller for load frequency control of multi area power system with diverse sources. Int. J. Electr. Eng. Inform. 2020, 12, 747–769. [Google Scholar]
- Sahu, R.K.; Panda, S.; Padhan, S. A novel hybrid gravitational search and pattern search algorithm for load frequency control of nonlinear power system. Appl. Soft Comput. 2015, 29, 310–327. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Suresh, C.V. Differential evolution based intelligent control approach for LFC of multiarea power system with communication time delays. In Proceedings of the 2021 International Conference on Computing, Communication, and Intelligent Systems, Noida, India, 19–20 February 2021; pp. 868–873. [Google Scholar] [CrossRef]
- Saha, A.; Saikia, L.C. Renewable energy source- based multiarea AGC system with integration of EV utilizing cascade controller considering time delay. Int. Trans. Electr. Energy Syst. 2018, 29, e2646. [Google Scholar] [CrossRef] [Green Version]
- Naga, C.S.K.; Sambasivarao, G. Combined frequency and voltage stabilization of multi-area multi source system by DE-AEFA optimized PID controller with coordinated performance of IPFC and RFBs. Int. J. Ambient. Energy 2020. [Google Scholar] [CrossRef]
- Kalyan, C.N.S. UPFC and SMES based coordinated control strategy for simultaneous frequency and voltage stability of an interconnected power system. In Proceedings of the 2021 1st International Conference on Power electronics and Energy, Bhubaneswar, India, 2–3 January 2021. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Sekhar, G.T.C. A novel hybrid PSO-PS optimized fuzzy PI controller for AGC in multi area interconnected power systems. Int. J. Electr. Power Energy Syst. 2015, 64, 880–893. [Google Scholar] [CrossRef]
- Gupta, D.K.; Jha, A.V.; Appasani, B.; Srinivasulu, A.; Bizon, N.; Thounthong, P. Load frequency control using hybrid intelligent optimization technique for multi-source power systems. Energies 2021, 14, 1581. [Google Scholar] [CrossRef]
- Kalyan, C.H.N.S.; Rao, G.S. Impact of communication time delays on combined LFC and AVR of a multi-area hybrid system with IPFC-RFBs coordinated control strategy. Prot. Control Mod. Power Syst. 2021, 6, 7. [Google Scholar] [CrossRef]
- Sahu, P.C.; Prusty, R.C.; Panda, S. Approaching hybridized GWO-SCA based type-II fuzzy controller in AGC of diverse energy source multi area power system. J. King Saud Univ. Eng. Sci. 2020, 32, 186–197. [Google Scholar] [CrossRef]
- Naga, C.S.K.; Sambasivarao, G. Performance comparison of various energy storage devices in Combined LFC and AVR of multi area system with renewable energy integration. Int. J. Renew. Energy Res. 2020, 10, 933–944. [Google Scholar]
- Eskandar, H.; Sadollah, A.; Bahereininejad, A.; Hamdi, M. Water Cycle algorithm- a novel meta-heuristic optimization method for solving constrained engineering optimization problems. Comput. Struct. 2012, 110, 151–166. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ACE | ΔACE | ||||
|---|---|---|---|---|---|
| BN | SN | Z | SP | BP | |
| BN | BN | BN | BN | SN | Z |
| SN | BN | BN | SN | Z | SP |
| Z | BN | SN | Z | SP | BP |
| SP | SN | Z | SP | BP | BP |
| Algorithm | WCA: T2-FPID | hPSO-PS: Fuzzy PID [22] | hFA-PS: PID [8] | GA: PI [4] | |
|---|---|---|---|---|---|
| Optimal gain | Area 1 | K1 = 0.0759 K2 = 0.0377 KP = 1.1288 KI = 0.1584 KD = 0.5725 | KP = 1.0366 KI = 0.2098 KD = 0.4317 | KP = 1.1231 KI = 0.3665 KD = 0.3821 | KP = 0.7308 KI = 0.1844 |
| Area 2 | K1 = 0.1890 K2 = 0.0908 KP = 1.1056 KI = 0.1712 KD = 0.4070 | KP = 1.0900 KI = 0.2521 KD = 0.3502 | KP = 1.1673 KI = 0.1056 KD = 0.3276 | KP = 0.6877 KI = 0.1722 | |
| ITAE × 10−4 | 3.35 | 11.29 | 26.88 | 67.49 | |
| Settling time (s) | Δf1 | 4.65 | 5.16 | 6.92 | 10.95 |
| Δf2 | 5.83 | 7.89 | 9.87 | 10.42 | |
| ΔPtie12 | 5.08 | 6.80 | 9.48 | 10.21 | |
| Parameters | Without CTDs | With CTDs | ||||
|---|---|---|---|---|---|---|
| T2-FPID | Fuzzy PID | PID | T2-FPID | Fuzzy PID | PID | |
| Area 1 | K1 = 0.0685 K2 = 0.0962 KP = 1.8995 KI = 0.3503 KD = 0.6172 | KP = 1.2095 KI = 0.3167 KD = 0.4756 | KP = 1.1048 KI = 0.2040 KD = 0.3010 | K1 = 0.0873 K2 = 0.0900 KP = 1.2040 KI = 0.4098 KD = 0.8930 | KP = 0.9812 KI = 0.1294 KD = 0.8226 | KP = 0.8297 KI = 0.2454 KD = 0.7272 |
| Area 2 | K1 = 0.0990 K2 = 0.0355 KP = 1.2156 KI = 0.2911 KD = 0.7691 | KP = 0.9990 KI = 0.2988 KD = 0.3765 | KP = 1.2136 KI = 0.3139 KD = 0.6754 | K1 = 0.0158 K2 = 0.0776 KP = 1.0639 KI = 0.3822 KD = 0.7819 | KP = 1.0189 KI = 0.2194 KD = 0.9335 | KP = 0.9867 KI = 0.3125 KD = 0.6999 |
| Settling Time (s) | Without CTDs | With CTDs | ||||||
|---|---|---|---|---|---|---|---|---|
| PID | Fuzzy PID | T2-FPID | PID | Fuzzy PID | T2-FPID | T2-FPID with RFBs | T2-FPID with UPFC-RFBs | |
| Δf1 | 14.06 | 8.72 | 5.222 | 23.01 | 14.09 | 11.82 | 8.364 | 5.44 |
| ΔPtie12 | 15.91 | 10.96 | 9.05 | 22.51 | 15.82 | 12.58 | 8.031 | 5.639 |
| Δf2 | 15.42 | 9.725 | 6.398 | 22.28 | 14.14 | 11.93 | 8.641 | 6.54 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalyan, C.N.S.; Goud, B.S.; Reddy, C.R.; Ramadan, H.S.; Bajaj, M.; Ali, Z.M. Water Cycle Algorithm Optimized Type II Fuzzy Controller for Load Frequency Control of a Multi-Area, Multi-Fuel System with Communication Time Delays. Energies 2021, 14, 5387. https://doi.org/10.3390/en14175387
Kalyan CNS, Goud BS, Reddy CR, Ramadan HS, Bajaj M, Ali ZM. Water Cycle Algorithm Optimized Type II Fuzzy Controller for Load Frequency Control of a Multi-Area, Multi-Fuel System with Communication Time Delays. Energies. 2021; 14(17):5387. https://doi.org/10.3390/en14175387
Chicago/Turabian StyleKalyan, Ch. Naga Sai, B. Srikanth Goud, Ch. Rami Reddy, Haitham S. Ramadan, Mohit Bajaj, and Ziad M. Ali. 2021. "Water Cycle Algorithm Optimized Type II Fuzzy Controller for Load Frequency Control of a Multi-Area, Multi-Fuel System with Communication Time Delays" Energies 14, no. 17: 5387. https://doi.org/10.3390/en14175387
APA StyleKalyan, C. N. S., Goud, B. S., Reddy, C. R., Ramadan, H. S., Bajaj, M., & Ali, Z. M. (2021). Water Cycle Algorithm Optimized Type II Fuzzy Controller for Load Frequency Control of a Multi-Area, Multi-Fuel System with Communication Time Delays. Energies, 14(17), 5387. https://doi.org/10.3390/en14175387