
Control-Oriented Modeling for Nonlinear MIMO Turbofan Engine Based on Equilibrium Manifold Expansion Model


Abstract
:1. Introduction
2. Description of EM and EME Model
2.1. Definitions of the Model
2.2. Properties of the Model
3. Modeling of the EME Model for the MIMO Turbofan Engines
3.1. The Source of the Identification Data
3.2. Identification of the MIMO EME Model
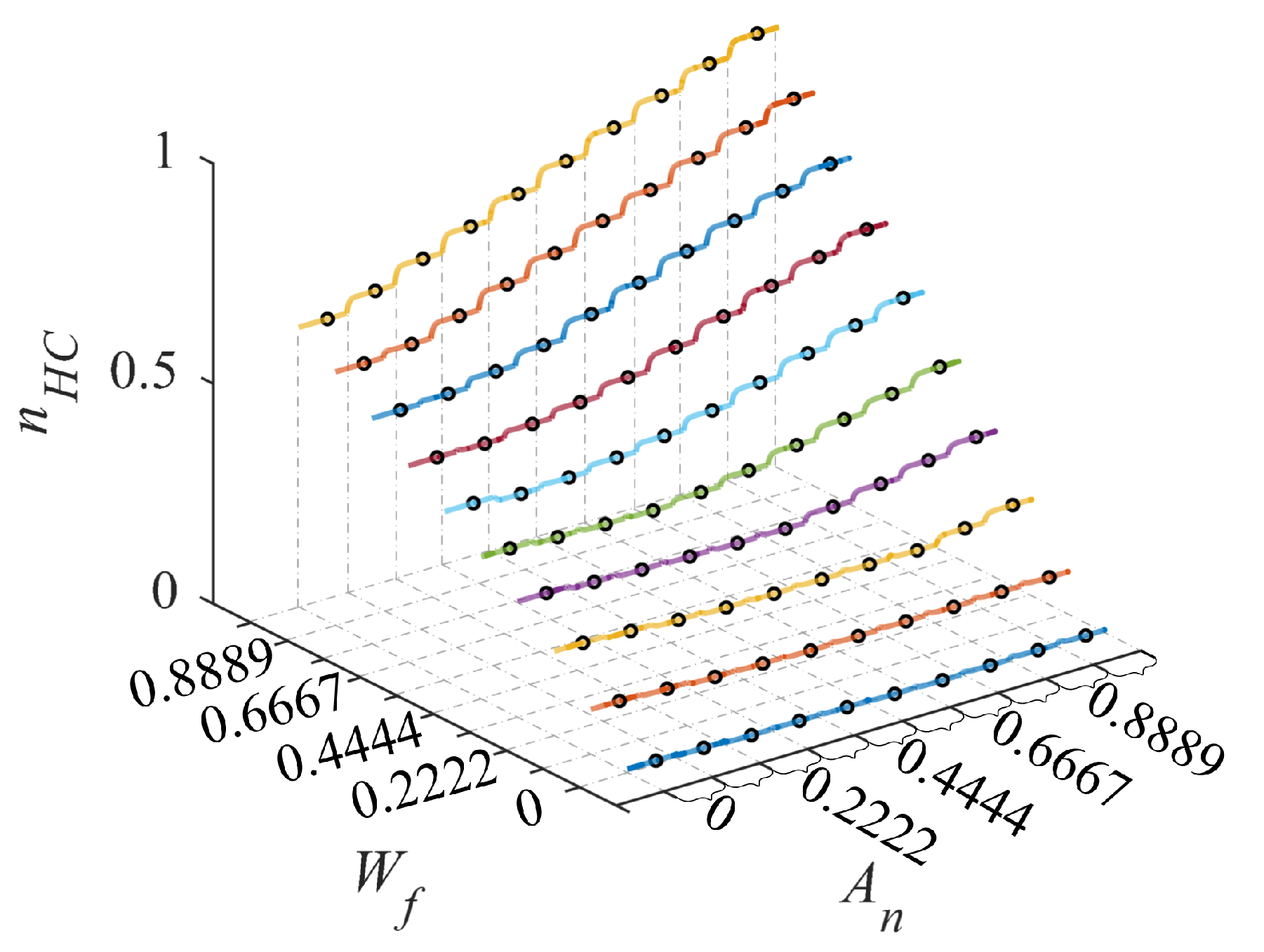
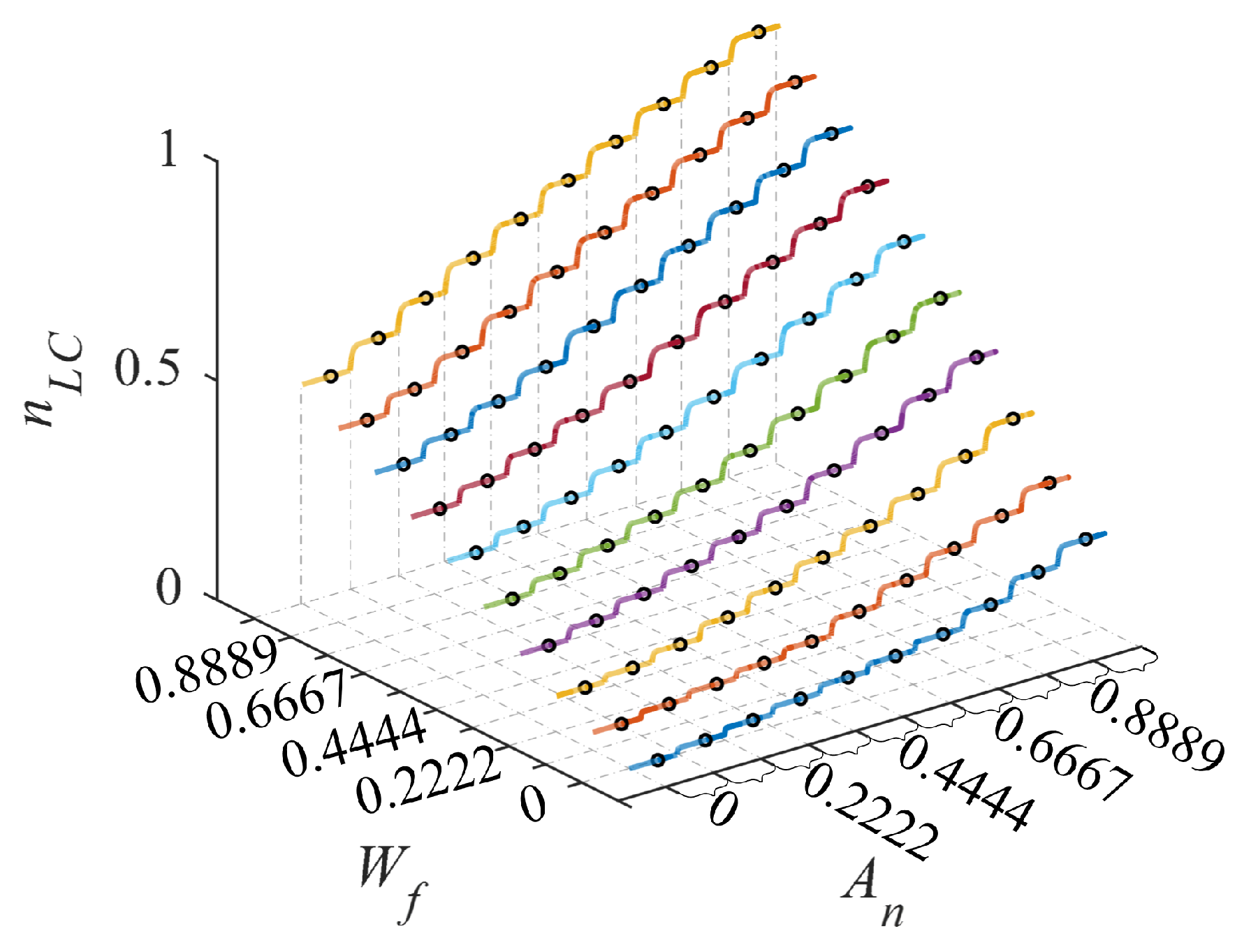
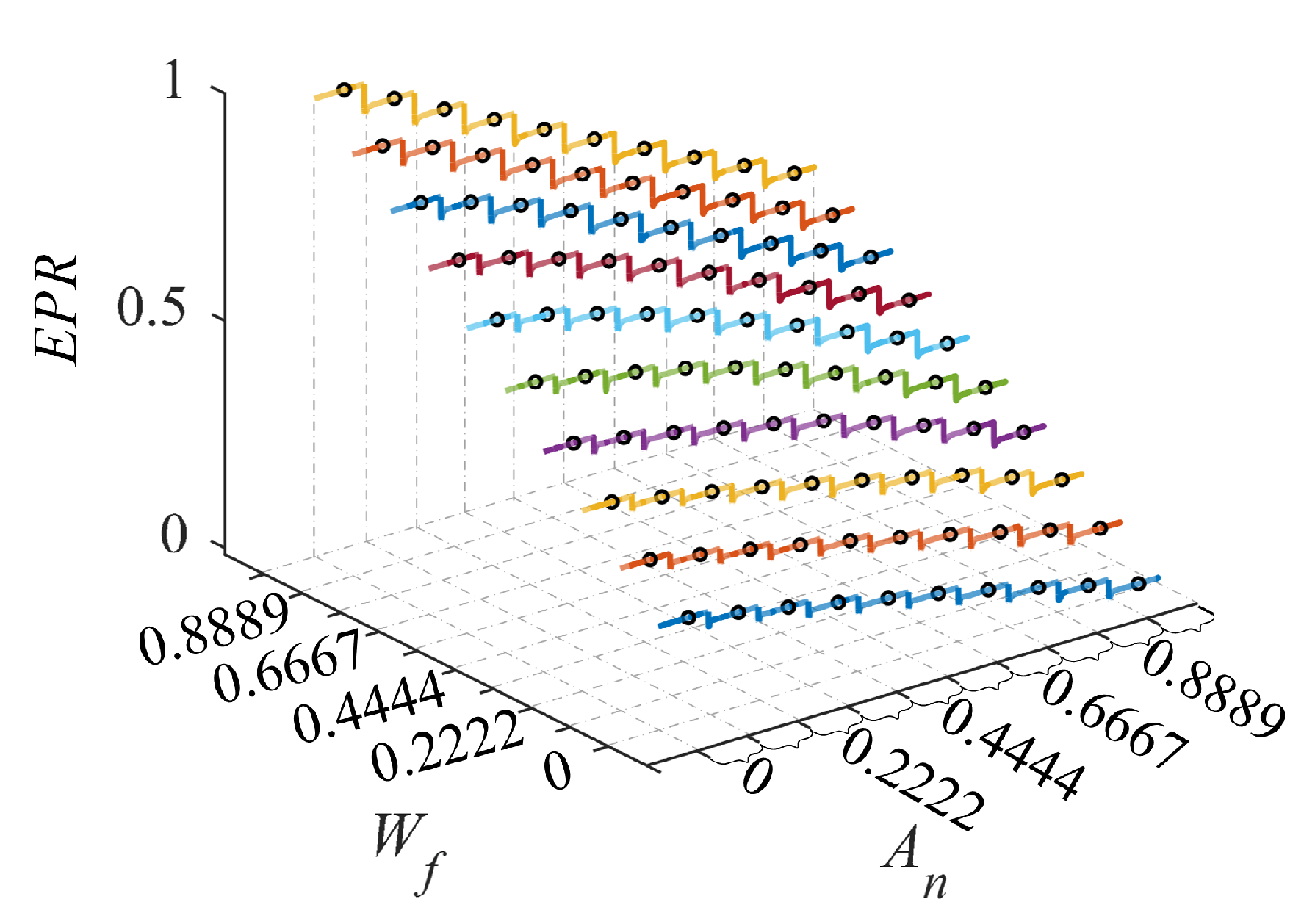
- Based on the steady-state results obtained by the simulation of the turbofan engine NCL model, the steady-state EM results of the engine shown in Equation (8) are identified.
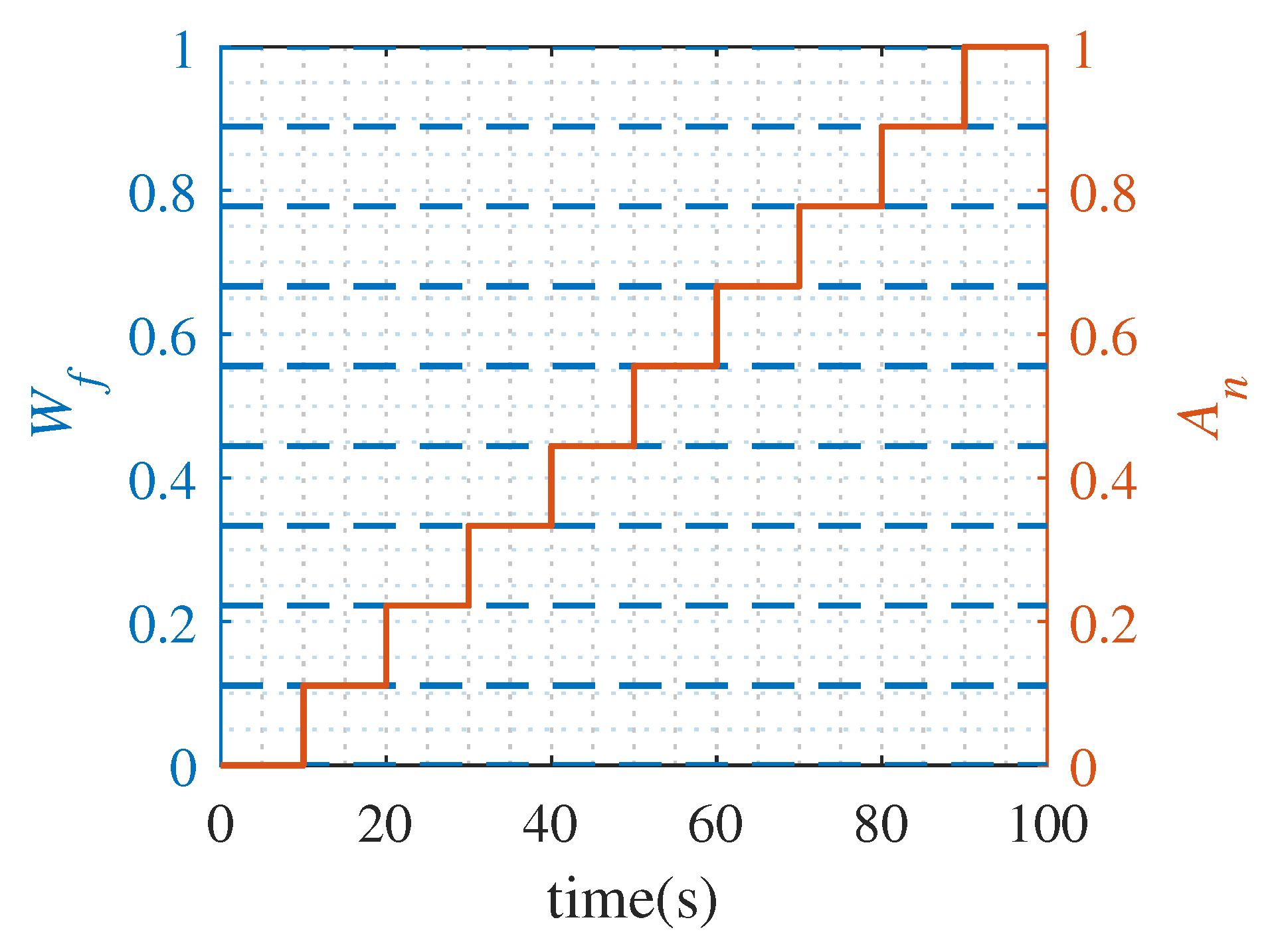
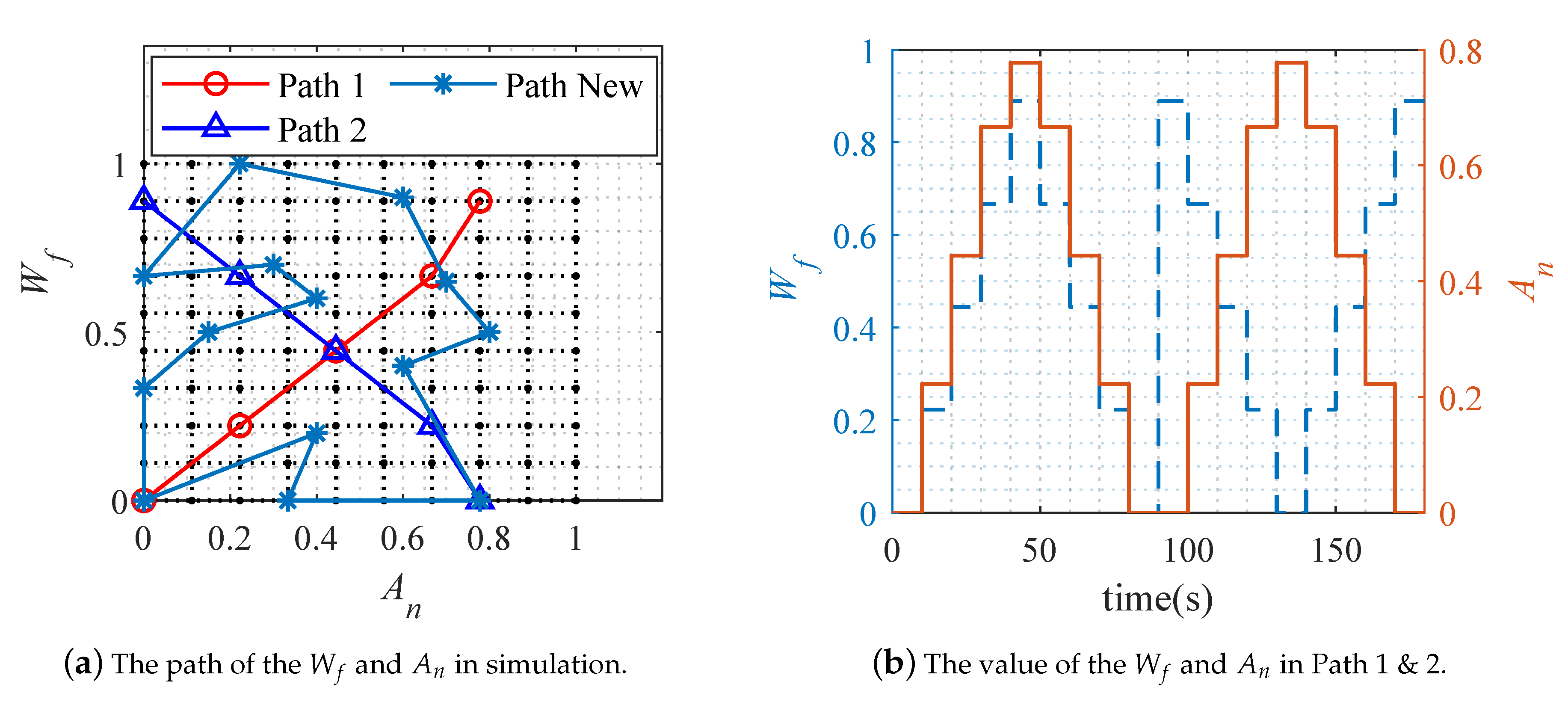
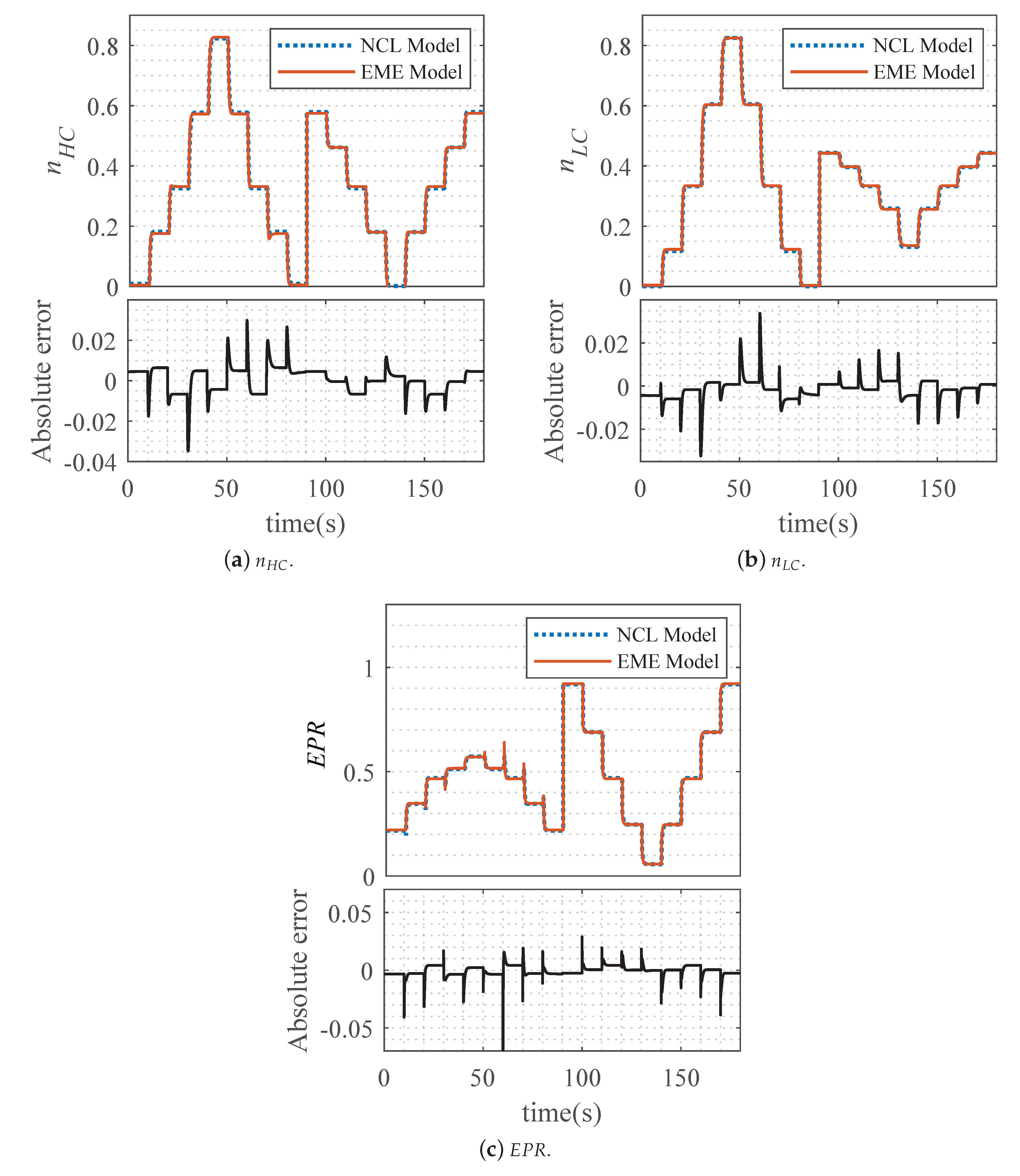
- In the NCL model simulation process, the input variable signal is set to the staircase signal. The EME model coefficients in Equation (11) are identified by simulation results of the NCL model and the EM model.
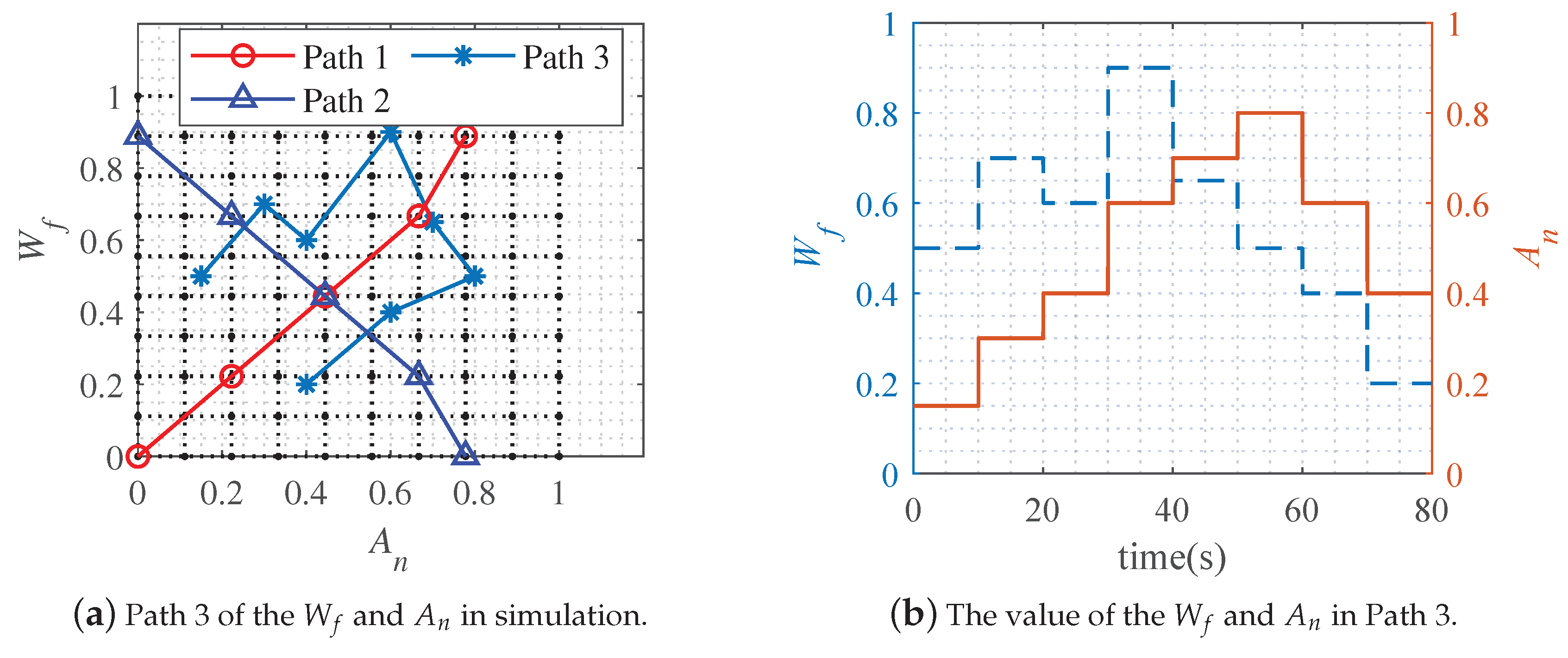
3.3. Effects of Scheduling Variables on Model Accuracy
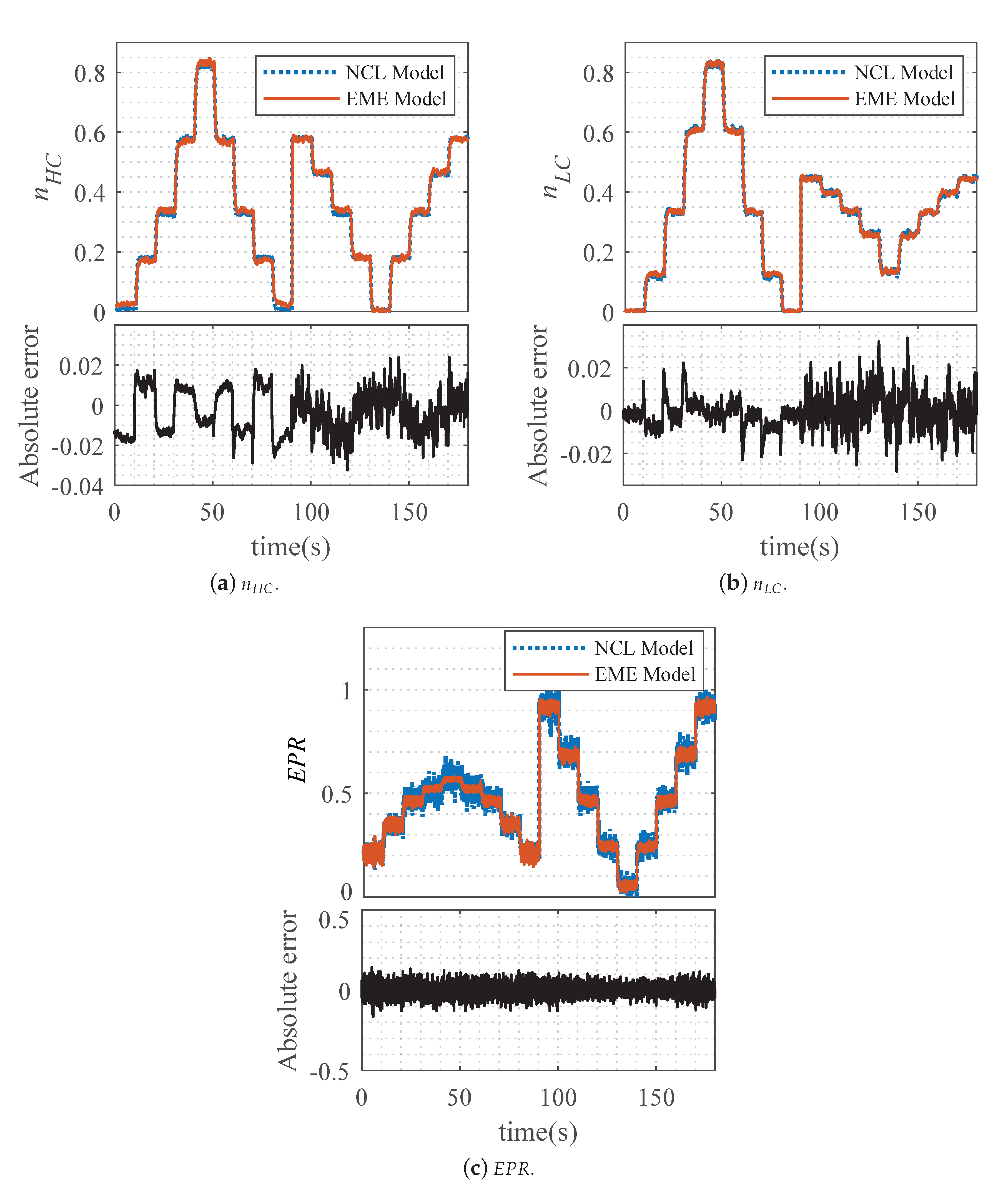
3.4. Effects of Noise on Model Accuracy
4. Validation and Stability Analysis of the EME Model
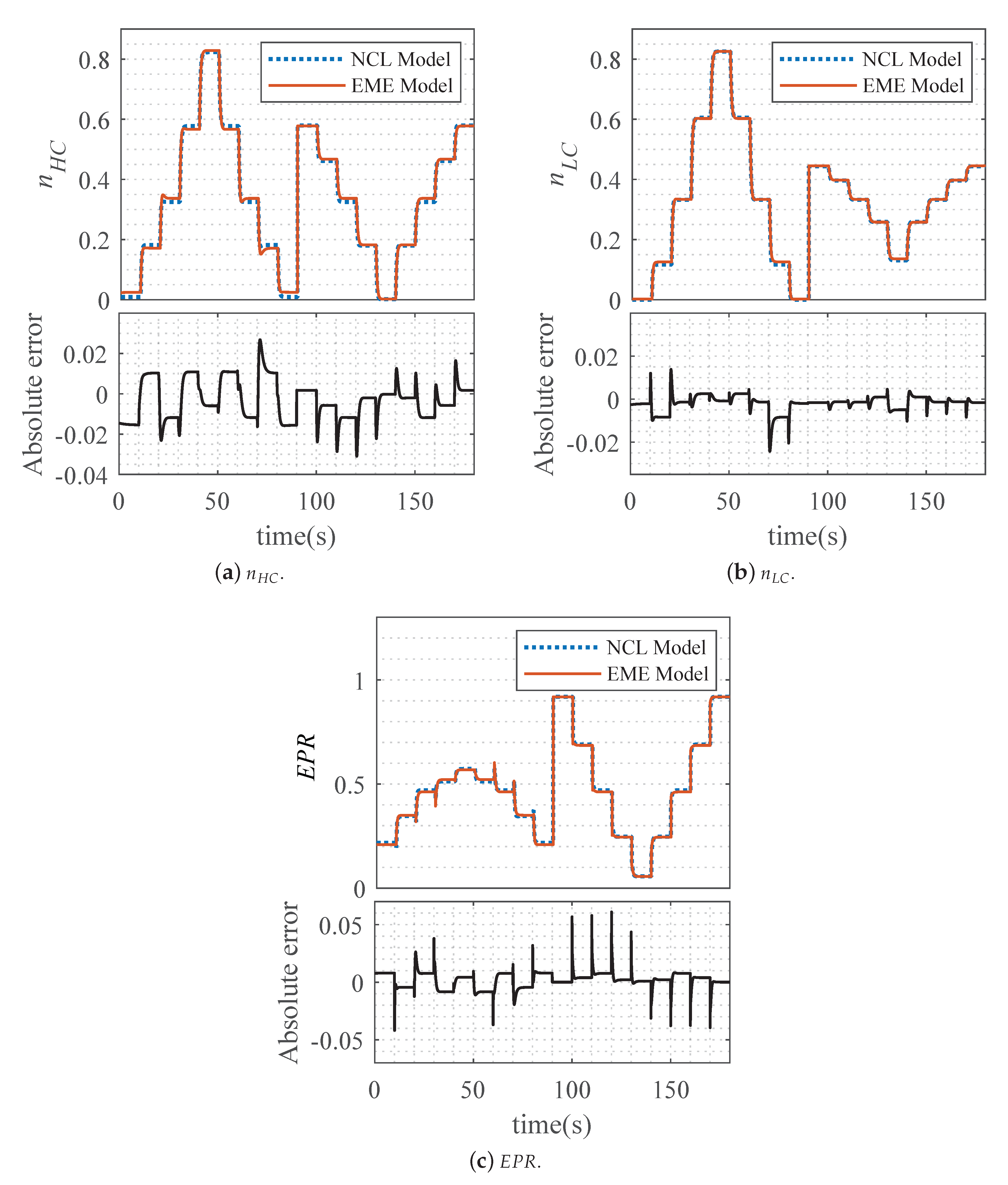
4.1. Validation at Dynamic Off-Design Conditions
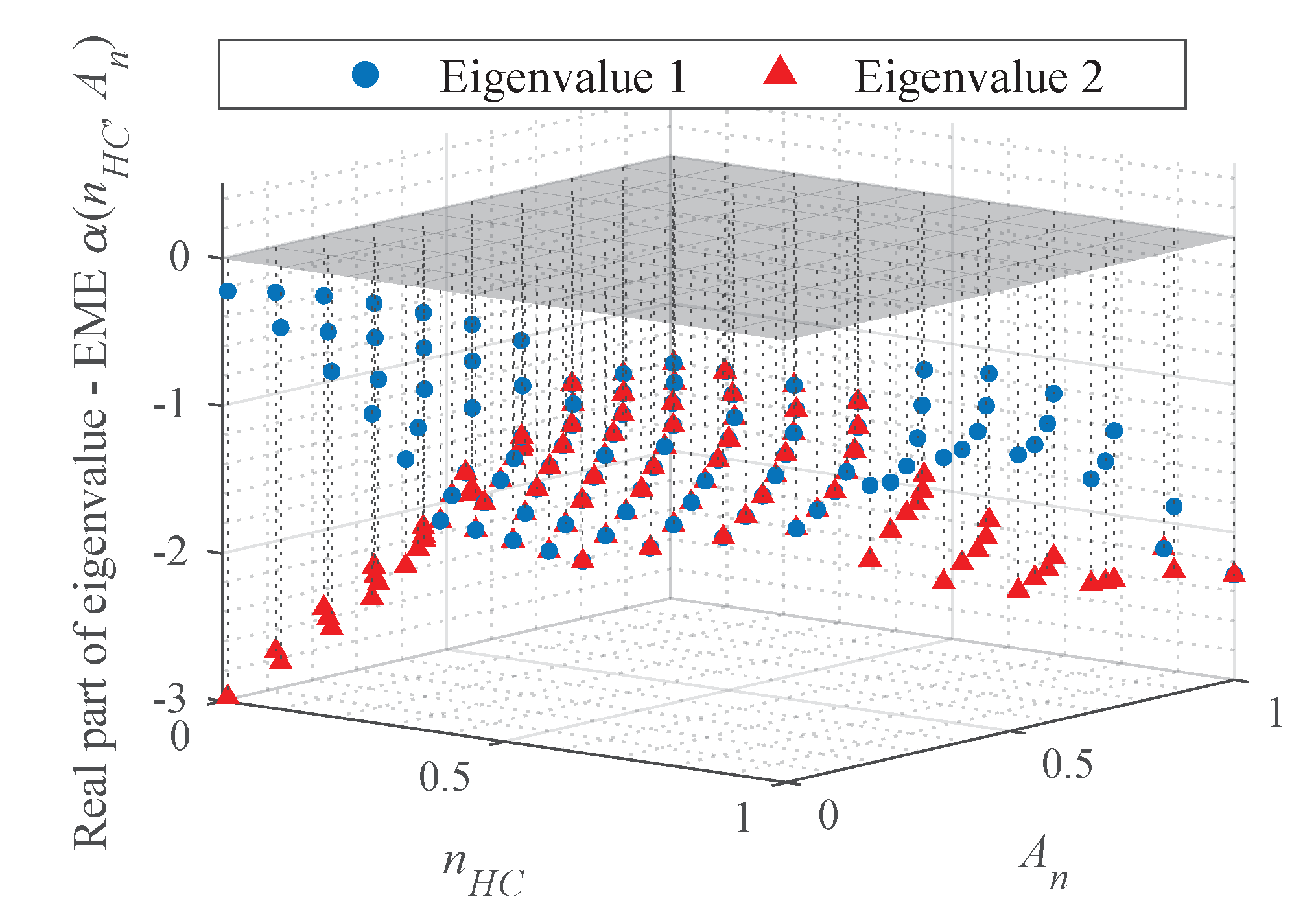
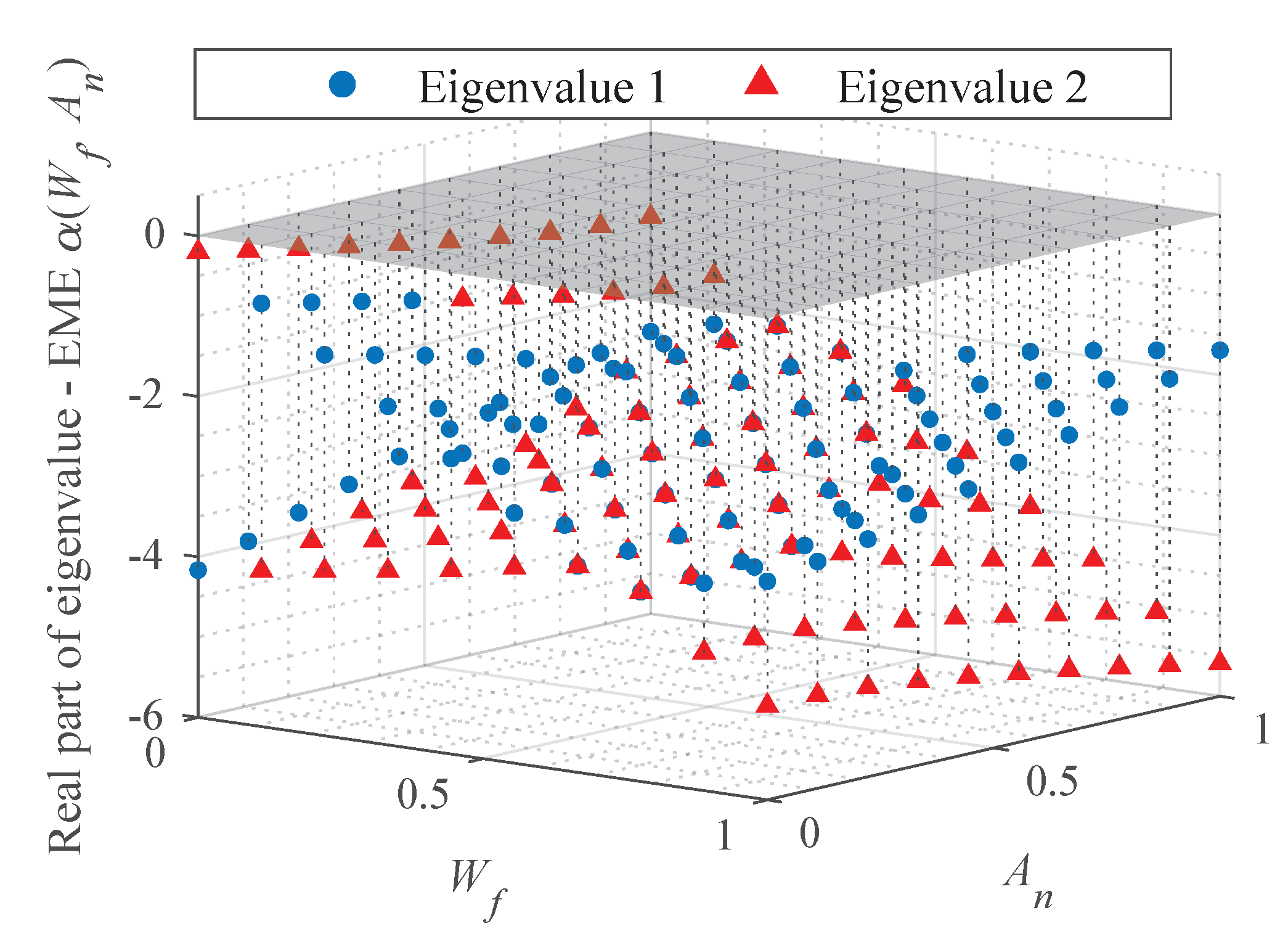
4.2. Linearization and Stability Analysis
5. Conclusions
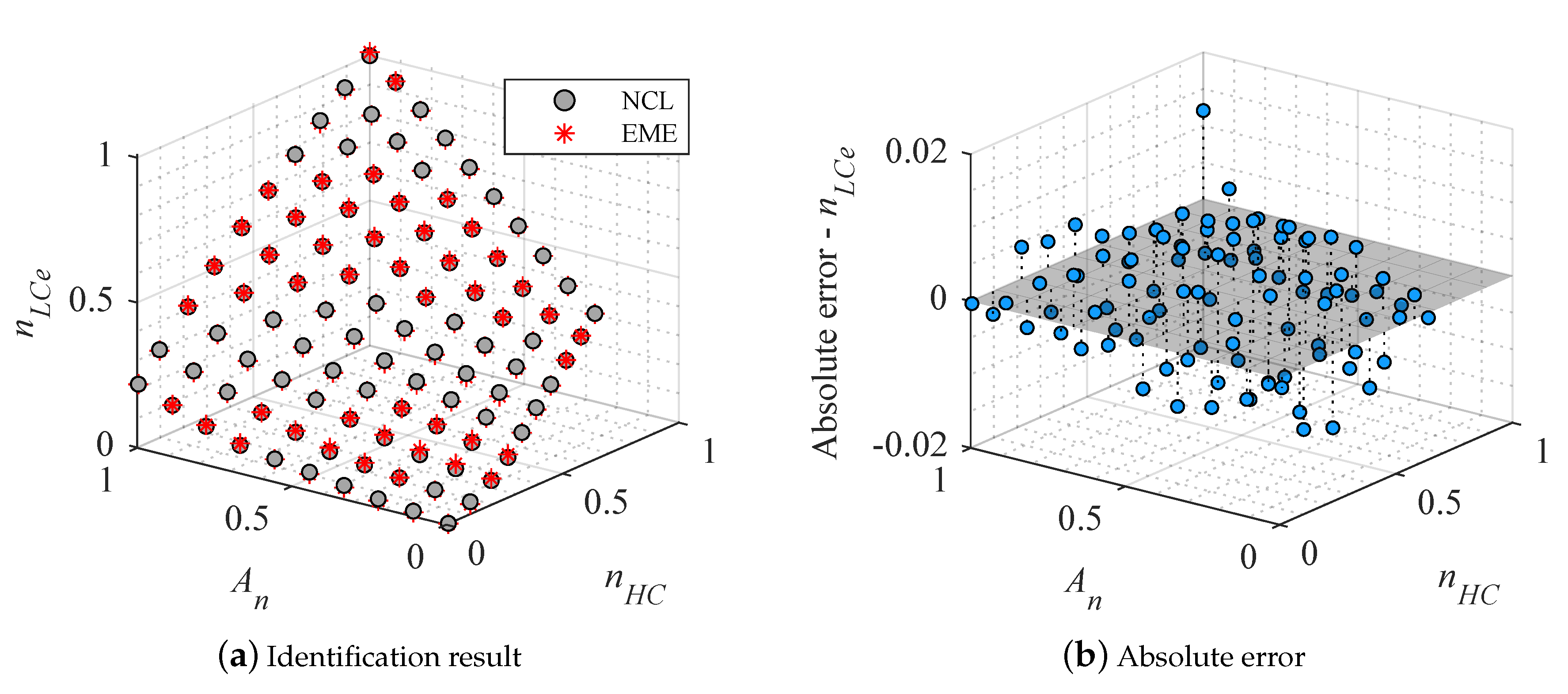
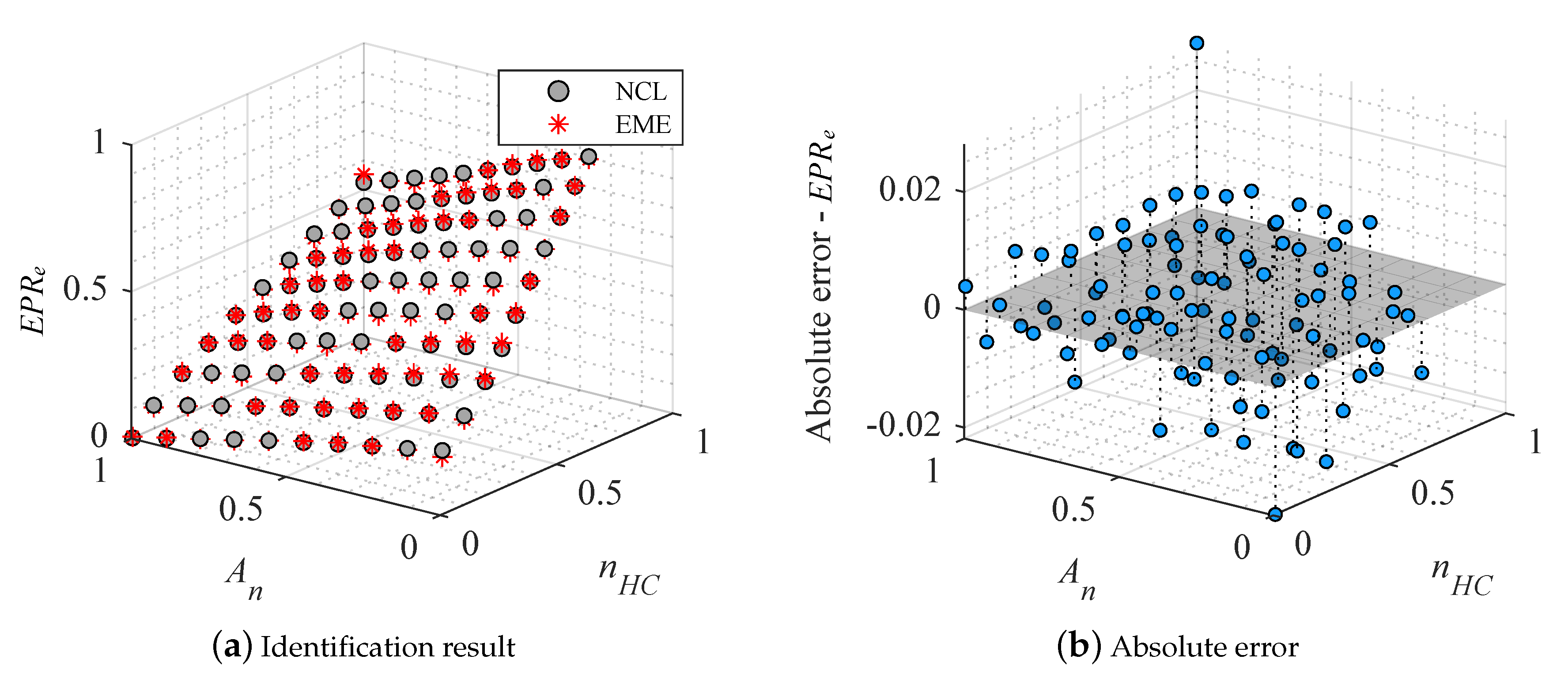
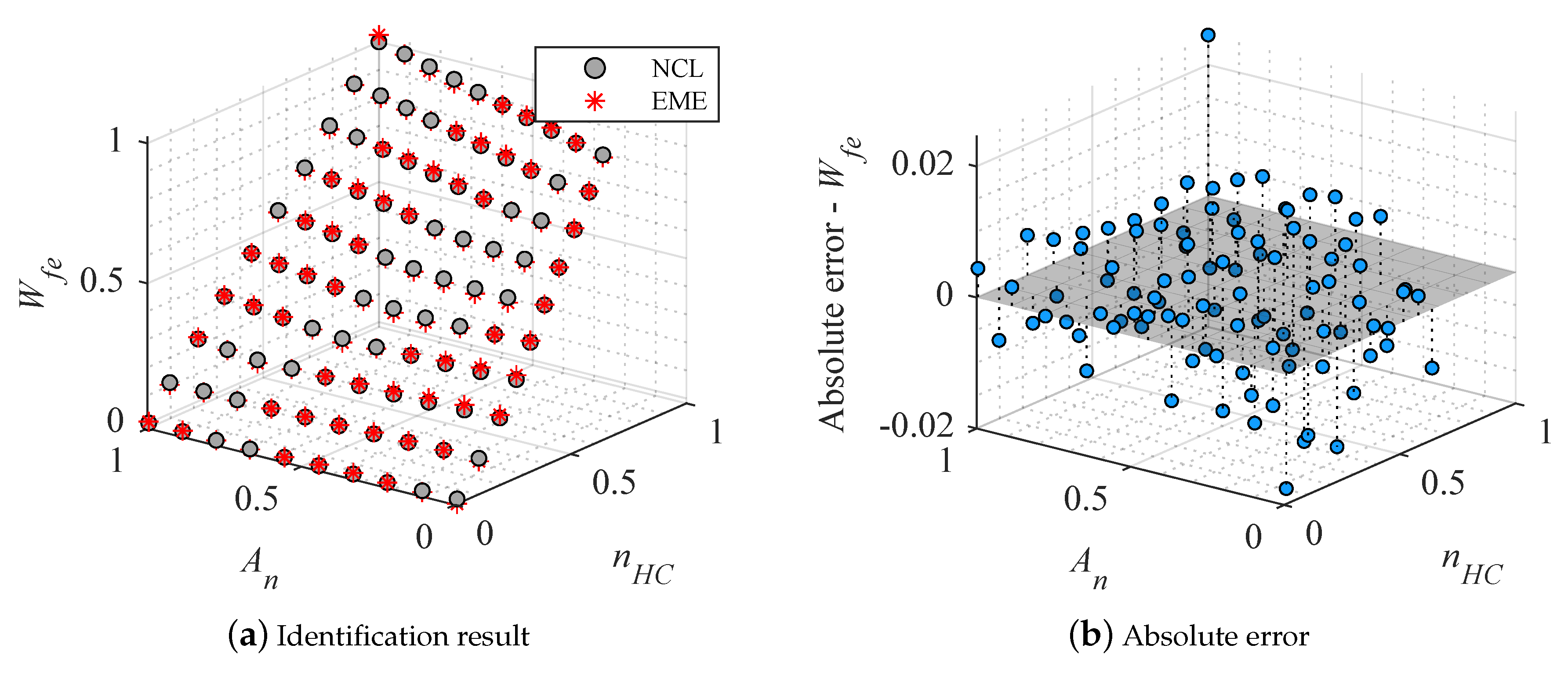
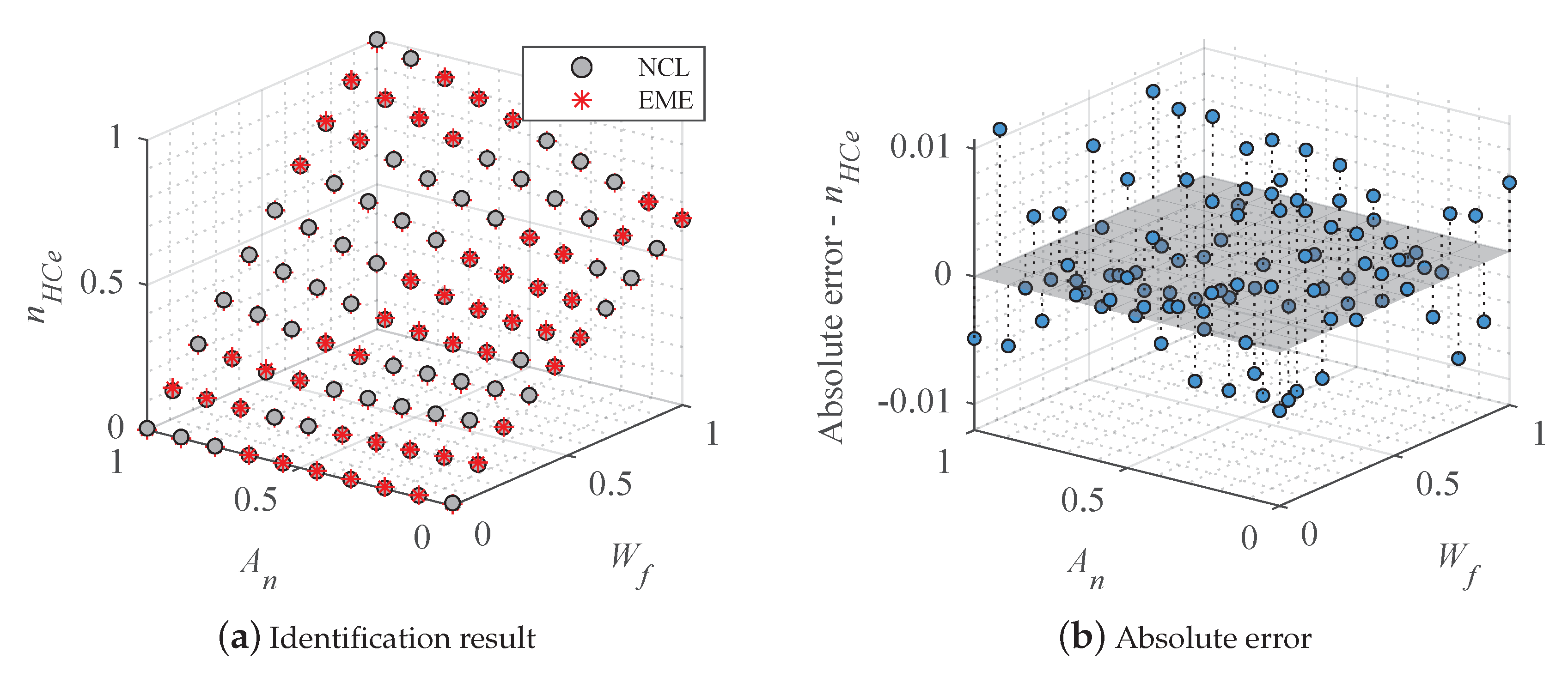
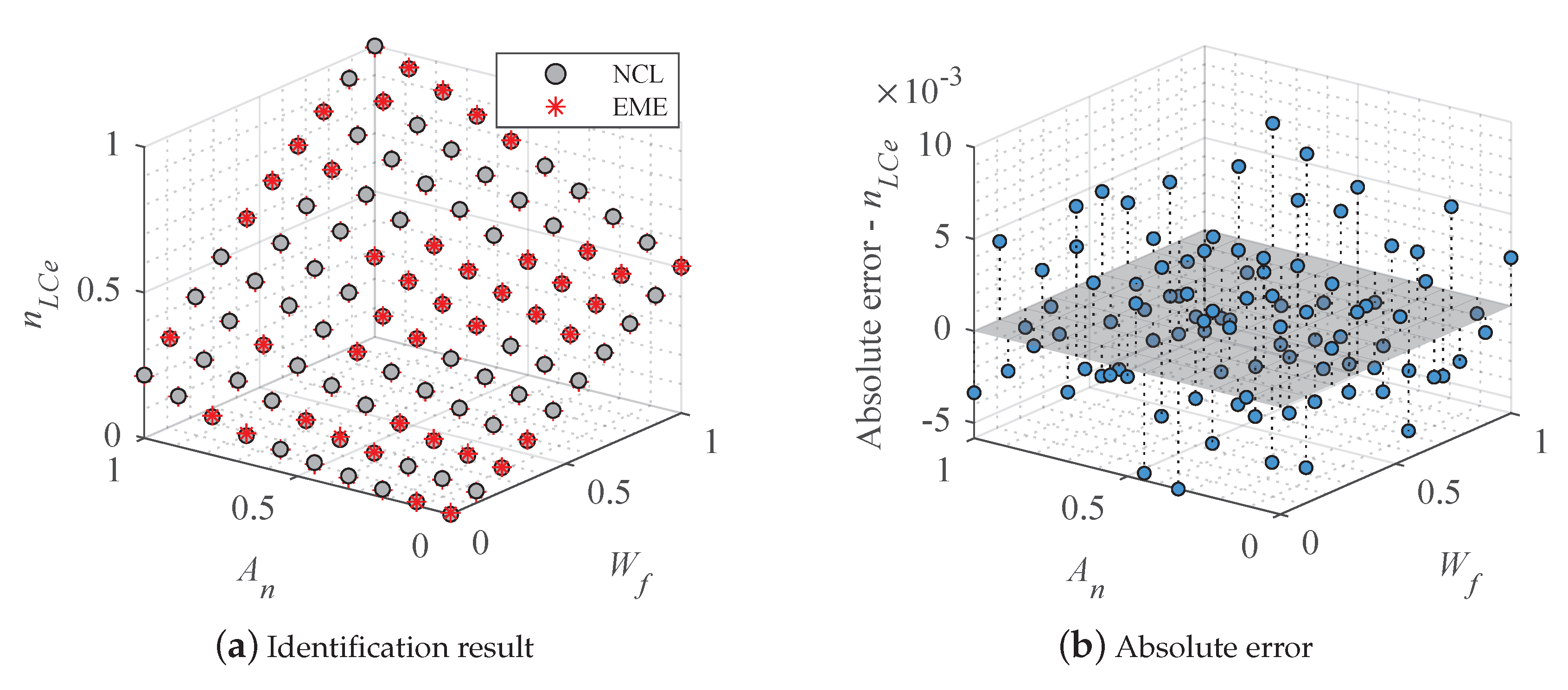
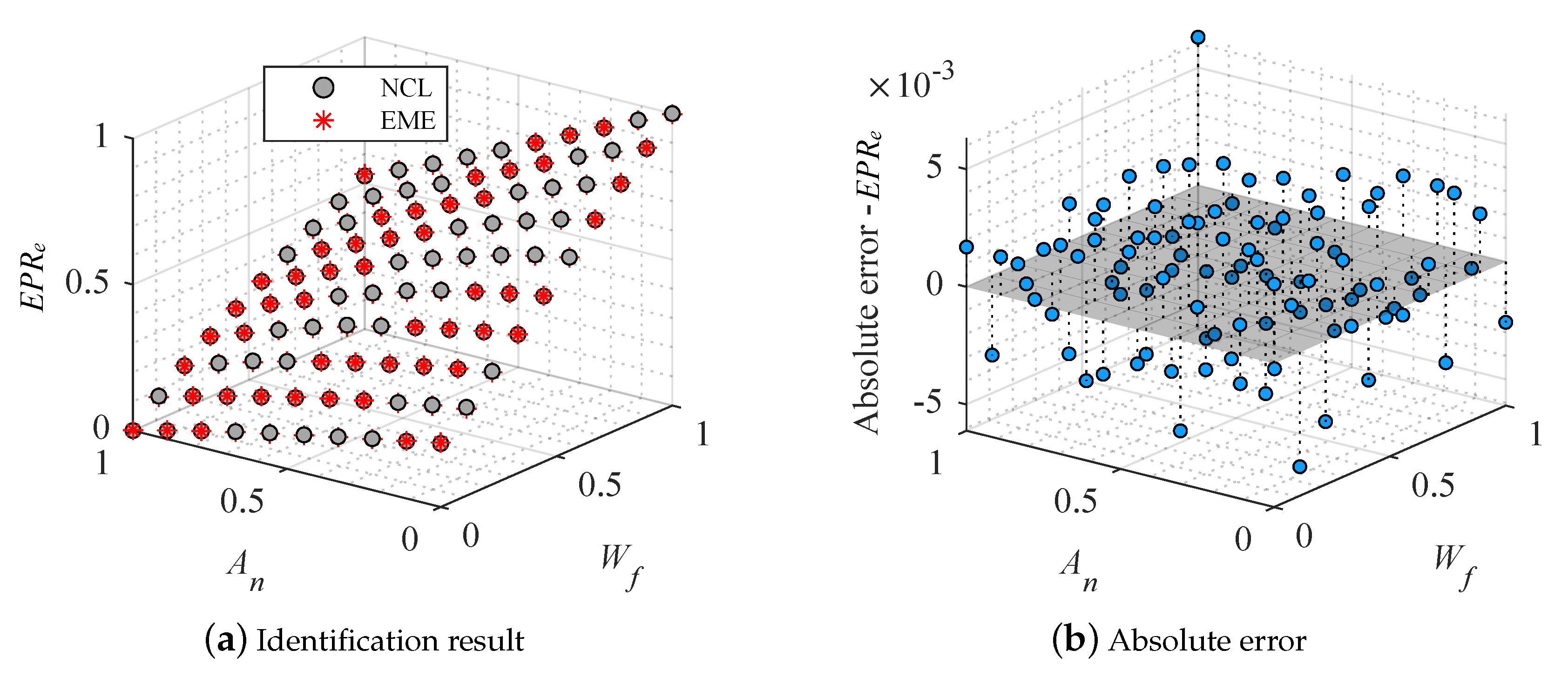
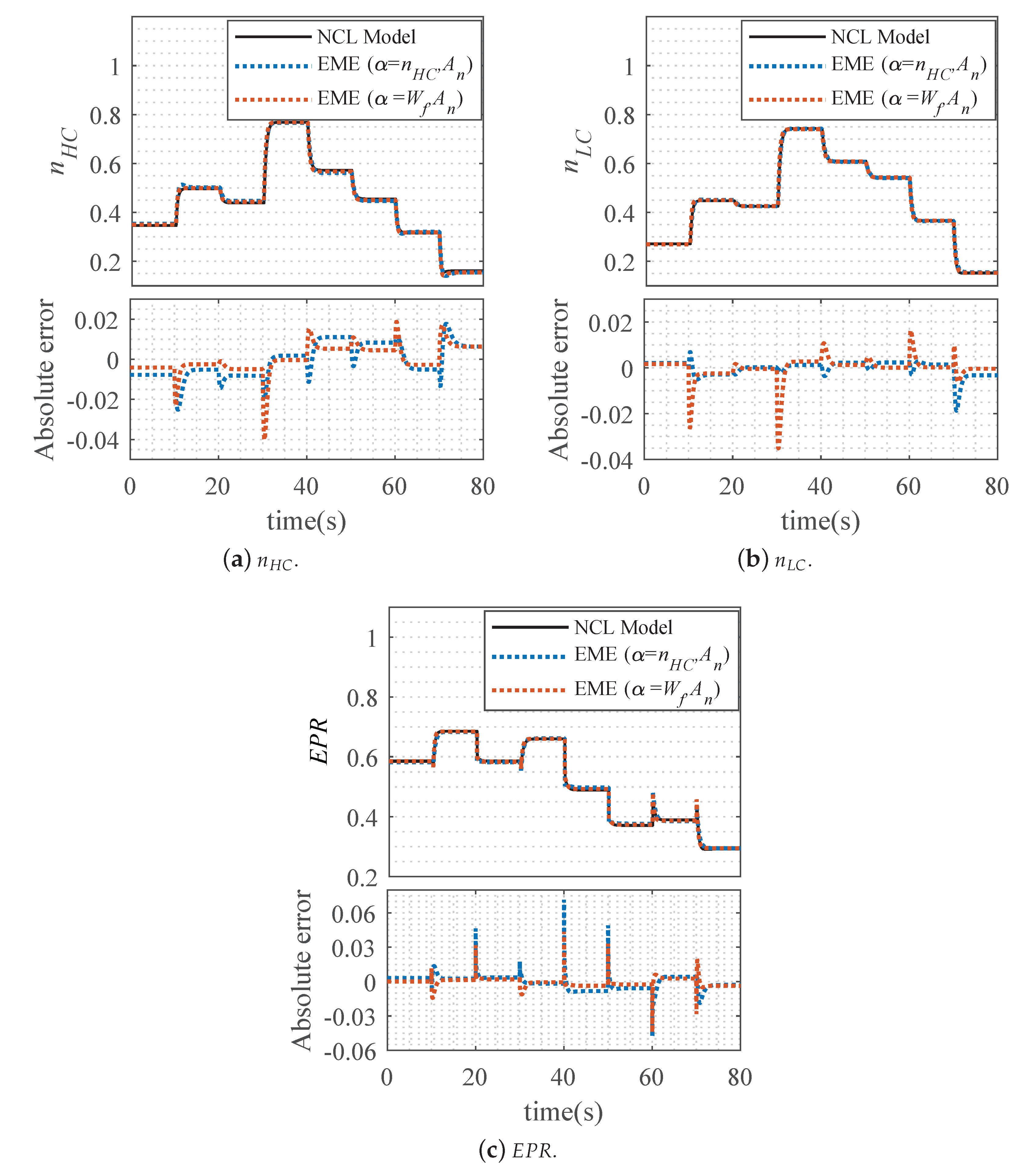
- The two EME models that contain the input variables () and the output variables () are established. The results of the steady state EM () show that the absolute error range of (−0.015–0.017) is better than (−0.022–0.028) and (−0.02–0.024). The absolute error range of EM () are about −0.006–0.010 in , −0.0060–0.0060 in , and −0.012–0.010 in . Obviously, the accuracy of EME () is higher than EME (). Because of the simple structure, the EME model also meets the needs of real-time simulation. Meanwhile, the EME model still shows high accuracy under the influence of noise.
- The EME model meets the accuracy requirement of the simulation and the stability in the entire range of operating conditions. The validity of the EME model is verified by simulation at off-design points. At the same time, the results also show that the identification of the dynamic coefficients for the EME model can be completed through only considering simple paths. Depending on the property of the EME model, the linearization of the model is completed. By calculating the eigenvalues, both EME models (,) have stable linearization result, thus ensuring that the EME model can be regarded as a control-oriented model.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dong, Z.; Li, D.; Wang, Z.; Sun, M. A review on exergy analysis of aerospace power systems. Acta Astronaut. 2018, 152, 486–495. [Google Scholar] [CrossRef]
- Liu, J.; Ma, Y.; Zhu, L.; Zhao, H.; Liu, H.; Yu, D. Improved gain scheduling control and its application to aero-engine LPV synthesis. Energies 2020, 13, 5967. [Google Scholar] [CrossRef]
- Aretakis, N.; Roumeliotis, I.; Alexiou, A.; Romesis, C.; Mathioudakis, K. Turbofan engine health assessment from flight data. J. Eng. Gas. Turbines Power Trans. ASME 2015, 137, 041203. [Google Scholar] [CrossRef]
- Zhou, S.; Ma, H.; Yang, Y.; Zhou, C. Investigation on propagation characteristics of rotating detonation wave in a radial-flow turbine engine combustor model. Acta Astronaut. 2019, 160, 15–24. [Google Scholar] [CrossRef]
- Zheng, J.L.; Chang, J.T.; Ma, J.C.; Yu, D.R. Performance uncertainty propagation analysis for control-oriented model of a turbine-based combined cycle engine. Acta Astronaut. 2018, 153, 39–49. [Google Scholar] [CrossRef]
- Link, C.J.; Jack, D.M. Aircraft Engine Controls: Design, System Analysis and Health Monitoring; AIAA Education Series; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2009. [Google Scholar]
- Szuch, J.R.; Seldne, K. Real-Time Simulation of F100-PW-100 Turbofan Engine Using the Hybrid Computer; NASA TMX-3261; National Aeronautics and Space Administration: Washington, DC, USA, 1975. [Google Scholar]
- Ballin, M.G. A High Fidelity Real-Time Simulation of a Small Turboshaft Engine; NASA-TM-100991; National Aeronautics and Space Administration: Washington, DC, USA, 1988. [Google Scholar]
- Ma, J.X.; Chang, J.T.; Ma, J.C.; Bao, W.; Yu, D.R. Mathematical modeling and characteristic analysis for over-under turbine based combined cycle engine. Acta Astronaut. 2018, 148, 141–152. [Google Scholar] [CrossRef]
- Frederick, D.K.; Decastro, J.A.; Litt, J.S. User’s Guide for the Commercial Modular Aero-Propulsion System Simulation (C-MAPSS); NASA/TM-215026; National Aeronautics and Space Administration: Washington, DC, USA, 2007. [Google Scholar]
- Csank, J.; May, R.D.; Litt, J.; Jonathan, L.; Ten-Huei, G. Commercial Modular Aero-Propulsion System Simulation 40k (C-MAPSS40k) User’s Guide; NASA/TM-216831; National Aeronautics and Space Administration: Washington, DC, USA, 2010. [Google Scholar]
- Evans, C.; Rees, D.; Hill, D. Frequency-domain identification of gas turbine dynamics. IEEE Trans. Control Syst. Technol. 1998, 6, 651–662. [Google Scholar] [CrossRef]
- Sugiyama, N. Derivation of ABCD System Matrices from Nonlinear Dynamic Simulation of Jet Engines; AIAA 92-3319; American Institute of Aeronautics and Astronautics: Washington, DC, USA, 2012. [Google Scholar]
- Feng, Z.P.; Sun, J.; Huang, J. A new method for establishing a state variable model of aeroengine. J. Aerosp. Power 1998, 13, 435–438. [Google Scholar]
- Leibov, R. Aircraft turbofan engine linear model with uncertain eigenvalues. IEEE Trans. Autom. Control 2002, 47, 1367–1369. [Google Scholar] [CrossRef]
- Rugh, W.J.; Shamma, J.S. Research on gain scheduling. Automatica 2000, 36, 1401–1425. [Google Scholar] [CrossRef]
- Leith, D.J.; Leithead, W.E. Survey of gain-scheduling analysis and design. Int. J. Control 2000, 73, 1001–1025. [Google Scholar] [CrossRef]
- Wolodkin, G.; Balas, G.J.; Garrard, W.J. Application of parameter-dependent robust control synthesis to turbofan engines. J. Guid. Control Dyn. 1999, 22, 833–838. [Google Scholar] [CrossRef]
- Shamma, J.S.; Cloutier, J.R. Gain-scheduled missile autopilot design using linear parameter varying transformations. J. Guid. Control Dyn. 2012, 16, 256–263. [Google Scholar] [CrossRef]
- Bhattacharya, R.; Balas, G.J.; Kaya, M.A.; Packard, A. Nonlinear receding horizon control of an F-16 aircraft. J. Guid. Control Dyn. 2002, 25, 924–931. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.Y.; Ji, G.L.; Zhu, Y.C. Identification of multi-model LPV models with two scheduling variables. J. Process Control. 2012, 22, 1198–1208. [Google Scholar] [CrossRef]
- Rotondo, D.; Nejjari, F.; Puig, V. Quasi-LPV modeling, identification and control of a twin rotor MIMO system. Control Eng. Pract. 2013, 21, 829–846. [Google Scholar] [CrossRef]
- Lu, F.; Huang, J.N.Q.J.J.Q.; Qiu, X.J. In-flight adaptive modeling using polynomial LPV approach for turbofan engine dynamic behavior. Aerosp. Sci. Technol. 2017, 64, 223–236. [Google Scholar] [CrossRef]
- Liu, T.J.; Sun, D.X.X.M.; Richter, H.; Zhu, F. Robust tracking control of aero-engine rotor speed based on switched LPV model. Aerosp. Sci. Technol. 2019, 91, 382–390. [Google Scholar] [CrossRef]
- Yu, D.R.; Cui, T.; Bao, W. Equilibrium manifold linearization model for normal shock position control systems. J. Aircr. 2005, 42, 1344–1347. [Google Scholar]
- Sui, Y.F.; Yu, D. Identification of expansion model based on equilibrium manifold of turbojet engine. Hangkong Xuebao/Acta Aeronaut. Astronaut. Sin. 2007, 28, 531–534. [Google Scholar]
- Yu, D.R.; Zhao, H.; Xu, Z.; Sui, Y.F.; Liu, J.F. An approximate non-linear model for aeroengine control. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2011, 225, 1366–1381. [Google Scholar] [CrossRef]
- Zhao, H.; Liu, J.F.; Yu, D.R. Approximate nonlinear modeling and feedback linearization control for aeroengines. J. Eng. Gas Turbines Power Trans. ASME 2001, 133, 111601. [Google Scholar] [CrossRef]
- Liu, X.F.; Yuan, Y. Nonlinear system modeling and application based on system equilibrium manifold and expansion model. J. Comput. Nonlinear Dyn. 2014, 9, 021013. [Google Scholar] [CrossRef]
- Liu, X.F.; Zhao, L. Approximate nonlinear modeling of aircraft engine surge margin based on equilibrium manifold expansion. Chin. J. Aeronaut. 2012, 25, 663–674. [Google Scholar] [CrossRef] [Green Version]
- Shi, Y.; Zhao, J.; Liu, Y.Y. Switching control for aero-engines based on switched equilibrium manifold expansion model. IEEE Trans. Ind. Electron. 2016, 64, 3156–3165. [Google Scholar] [CrossRef]
- Chen, C.; Zhao, J. Switching control of acceleration and safety protection for turbofan aero-engines based on equilibrium manifold expansion model. Asian J. Control. 2018, 20, 1689–1700. [Google Scholar] [CrossRef]
- Zhou, W.X. Research on Object-Oriented Modeling and Simulation for Aeroengine and Control System; Nanjing University of Aeronautics and Astronautics: Nanjing, China, 2007. [Google Scholar]
- Fei, X.; Huang, J.Q.; Zhou, W.X. Modeling of and simulation research on turbofan engine based on MATLAB/SIMULINK. J. Aerosp. Power 2007, 22, 2134–2138. [Google Scholar]
- Pan, M.; Huang, H.; Huang, J.Q. T-S fuzzy modeling for aircraft engines: The clustering and identification approach. Energies 2019, 12, 3284. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.; Lu, F.; Huang, J.Q. Fault diagnosis based on measurement reconstruction of hpt exit pressure for turbofan engine. Chin. J. Aeronaut. 2019, 32, 1156–1170. [Google Scholar] [CrossRef]
- Xu, W.; Huang, J.Q.; Qin, J.K.; Pan, M.X. Limit protection design in turbofan engine acceleration control based on scheduling command governor. Chin. J. Aeronaut. 2021, 34, 67–80. [Google Scholar] [CrossRef]
- Pan, M.; Zhang, K.; Chen, Y.; Huang, J.Q. A new robust tracking control design for turbofan engines: H∞/leitmann approach. Appl. Sci. 2017, 7, 439. [Google Scholar] [CrossRef] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| n | |
|---|---|
| h | |
| l | |
| f | |
| s | |
| p |
| Coef 1 | Result 1 | Coef 2 | Result 2 | Coef 3 | Result 3 |
|---|---|---|---|---|---|
| −0.0031 | −0.0278 | 0.1875 | |||
| 0.0952 | 0.1859 | 0.0355 | |||
| 0.0029 | −0.4295 | −0.5316 | |||
| 0.1822 | 0.4005 | 0.4544 | |||
| −0.0662 | −0.1310 | −0.1465 | |||
| 0.1586 | 1.0829 | 0.8436 | |||
| 1.1210 | 0.4523 | 0.2797 | |||
| −0.2957 | −0.2919 | −0.0796 | |||
| −0.0700 | −0.1283 | −0.2328 | |||
| 2.0277 | 1.6503 | 1.6111 | |||
| −2.0877 | −2.8265 | −3.1073 | |||
| 0.2379 | 0.8793 | 0.9245 | |||
| −1.9790 | −1.5050 | −1.6747 | |||
| 1.1385 | 1.4396 | 1.7264 | |||
| 0.5497 | 0.2737 | 0.2624 | |||
| Path | Output | ||||
|---|---|---|---|---|---|
| 1&2 | 0.9508 | 0.0103 | 0.9979 | ||
| 0.1539 | 0.0041 | 0.9996 | |||
| 0.4772 | 0.0073 | 0.9990 | |||
| New | 0.2701 | 0.0035 | 0.9994 | ||
| 0.1623 | 0.0042 | 0.9996 | |||
| 0.1615 | 0.0042 | 0.9997 | |||
| 1&2 with noise | 0.9204 | 0.0101 | 0.9980 | ||
| 0.1912 | 0.0046 | 0.9995 | |||
| 0.5516 | 0.0078 | 0.9988 | |||
| 1&2 | 0.3830 | 0.0065 | 0.9992 | ||
| 0.2505 | 0.0053 | 0.9994 | |||
| 0.1983 | 0.0047 | 0.9996 |
| Coef 1 | Result 1 | Coef 2 | Result 2 | Coef 3 | Result 3 |
|---|---|---|---|---|---|
| −0.2362 | −1.4657 | −0.0875 | |||
| 1.5140 | 0.2270 | −0.0401 | |||
| −2.1259 | −2.0621 | −0.9159 | |||
| 0.0148 | −0.1033 | 0.0749 | |||
| 0.0023 | −0.0175 | −0.0227 | |||
| 1.7453 | 1.3592 | 0.3058 | |||
| Coef 1 | Result 1 | Coef 2 | Result 2 | Coef 3 | Result 3 |
|---|---|---|---|---|---|
| 0.0047 | 0.0044 | 0.2207 | |||
| 0.0261 | 0.0832 | −0.2133 | |||
| −0.0989 | −0.0001 | 0.0389 | |||
| 0.0896 | 0.1935 | −0.0500 | |||
| −0.0207 | −0.0678 | 0.0054 | |||
| 1.0655 | 0.2134 | 0.6443 | |||
| −1.0625 | 0.2511 | 0.5970 | |||
| 1.2794 | 0.6322 | −0.7356 | |||
| −0.3306 | −0.2856 | 0.1915 | |||
| −1.1696 | 0.8536 | 0.5171 | |||
| 1.9950 | 0.0144 | −1.2565 | |||
| −0.7915 | −0.4243 | 0.5088 | |||
| 1.0608 | −0.9268 | −0.5161 | |||
| −0.7422 | 0.0930 | 0.4477 | |||
| −0.3170 | 0.3604 | 0.1315 | |||
| Coef 1 | Result 1 | Coef 2 | Result 2 | Coef 3 | Result 3 |
|---|---|---|---|---|---|
| 0.5015 | 3.7503 | −0.5078 | |||
| −0.0845 | 1.0956 | −0.1344 | |||
| −2.2704 | −1.4782 | 0.3204 | |||
| 0.6230 | −4.2386 | 0.0782 | |||
| 2.2073 | 0.9056 | −0.7508 | |||
| −2.6501 | −2.0944 | 0.9199 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, C.; Wang, Z.; Dai, L.; Liu, H.; Chang, J.; Yu, D. Control-Oriented Modeling for Nonlinear MIMO Turbofan Engine Based on Equilibrium Manifold Expansion Model. Energies 2021, 14, 6277. https://doi.org/10.3390/en14196277
Lv C, Wang Z, Dai L, Liu H, Chang J, Yu D. Control-Oriented Modeling for Nonlinear MIMO Turbofan Engine Based on Equilibrium Manifold Expansion Model. Energies. 2021; 14(19):6277. https://doi.org/10.3390/en14196277
Chicago/Turabian StyleLv, Chengkun, Ziao Wang, Lei Dai, Hao Liu, Juntao Chang, and Daren Yu. 2021. "Control-Oriented Modeling for Nonlinear MIMO Turbofan Engine Based on Equilibrium Manifold Expansion Model" Energies 14, no. 19: 6277. https://doi.org/10.3390/en14196277
APA StyleLv, C., Wang, Z., Dai, L., Liu, H., Chang, J., & Yu, D. (2021). Control-Oriented Modeling for Nonlinear MIMO Turbofan Engine Based on Equilibrium Manifold Expansion Model. Energies, 14(19), 6277. https://doi.org/10.3390/en14196277