1. Introduction
Modern electric drives applications feature stressing operation profiles, characterized by repeated sequences of fast and short transients. This kind of operation makes it impossible to define the duty cycle in a classical way [
1]. The most immediate example of these working conditions are the traction motors for e-Mobility. Due to the characteristics of the driving cycles [
2], the e-Drives are required continuous accelerations and braking, thus making it difficult to evaluate the instantaneous thermal condition of the motor [
3]. Moreover, as it is well-known, the most sensitive components to the heat are the stator windings, due to the limited thermal performance of their insulating materials [
4,
5]; therefore, it is of utmost importance to develop suitable motor thermal models, which are capable to accurately predict the instantaneous temperature of the stator winding. Classical thermal models are often intended for off-line thermal studies of electrical machines [
6] and can provide accurate results of the electrical machine temperature distribution; however, these models are not feasible for real-time implementation inside the electric drive control system and require a certain degree of knowledge of the electrical machine geometry and parameters.
In general, the real-time implementation of these models on industrial microcontrollers sets the following requirements:
Limited number of thermal elements (resistances and capacitances) in the circuit to be solved in real-time;
Accuracy of the predicted stator winding temperature to avoid damaging of the machine;
Definition of the thermal circuit parameters from experimental tests without detailed knowledge of the machine geometry and materials, as they are not often available to the electric drive manufacturer.
In the technical literature, several thermal models have been proposed for various types of electrical machines. In [
7], a lumped parameters model derived from geometrical data is proposed. Other lumped parameter models are proposed in [
8,
9], and their parameters are tuned from nodal and computational fluid dynamics (CFD) simulations. A second-order thermal model is proposed in [
10] for permanent magnet (PM) machines, but its parameters are determined by means of a reference set of temperatures and lacks validation in short thermal transient test. A computationally efficient lumped parameter model is proposed in [
11], which also takes into account the rotor thermal parameters. In this work, however, the thermal parameters are computed using an analytical tuning procedure and do not start from experimental measurements on the machine. Finally, Ref. [
12] proposes a reduced order thermal model, but its parameters are still based on simulations and the validation is performed only for the long transient. The goal of this paper is, therefore, to improve the second-order thermal model proposed for the first time in [
13,
14] and to put in evidence the measurement issue found during the thermal parameters determination. As it will be shown in Figure 5, the second-order thermal model proposed in [
13,
14] lacks precision during the long transient (i.e., the time range before reaching the steady-state temperature). For this reason, to improve the performance of that model, the heat transfer due to the end winding has been considered, and this new second-order thermal model is deeply analyzed in this paper.
This paper is organized as follows. In
Section 2, the basics of the adopted second-order model are presented and described, as well as the necessary experimental tests to define its thermal parameters. Then in
Section 3, the accuracy of the second-order model is discussed and validated on an experimental test bench.
Section 4 presents the proposed modification of the basic second-order thermal model. Finally, some more considerations and the conclusions are drawn in
Section 5 and
Section 6.
3. Second-Order Thermal Model Accuracy
The proposed thermal model reported in
Figure 1 was implemented in MATLAB/Simulink for the simulation of the motor thermal transients. The thermal transient used for the accuracy evaluation of the proposed thermal model was defined as the addition of two torque step variations. The first torque step starts from a no load condition at the ambient temperature up to 50% of the rated torque (same torque used for the determination of the thermal resistance
). When the motor reaches the temperature steady-state condition at 50% of the rated torque, a new torque step variation from 50% to 100% of the rate torque has been applied to the motor. The transient load test has been closed when the motor has reached the new thermal steady-state condition. During the transient load test, the electrical, mechanical quantities and the temperatures were acquired by means of the data recorder HBM Gen7. Since two thermal steady-state conditions had to be reached, the load test has been 10 h long.
Figure 5 shows the comparison between the measured and the computed winding temperature for complete torque transient. It is well evident the good agreements of the predicted and the measured temperature. In steady-state condition at 50% of the rated torque, the difference between the computed and the measured temperature is equal to 0.44
C with a percentage errors is equal to 0.67%. In steady-state condition at 100% of the rated torque, the difference between the computed and the measured temperature is equal to 2.15
C and the percentage error is equal to 1.81 %. The better values obtained with 50% of the rated torque is an expected result since 50% of the rated torque has been the load condition for the determination of the thermal resistance
. The accuracy of the second-order thermal model has been verified during the short transient as well.
Figure 6 and
Figure 7 show the predicted and the measured winding temperature for the torque step variation from 0 to 50% and from 50% to 100%, respectively. Both the figures put in evidence a delay of the measured temperatures with respect to the computed ones as shown by the dashed ellipses.
This time delay can be justified by an intrinsic thermal time constant of the thermocouple used for the measure of the winding temperature. Since the thermocouple is glued on the winding, the glue (epoxy resin) plus the thermocouple itself have a thermal capacitance and thermal resistance that can introduce the found time delay. This hypothesis is supported by the different initial derivatives of the measured temperature with respect the computed one. Inside the ellipses, it is well evident as the measured temperature starts with an horizontal trend (derivative equal to zero) while the predicted temperature starts with a positive derivative.
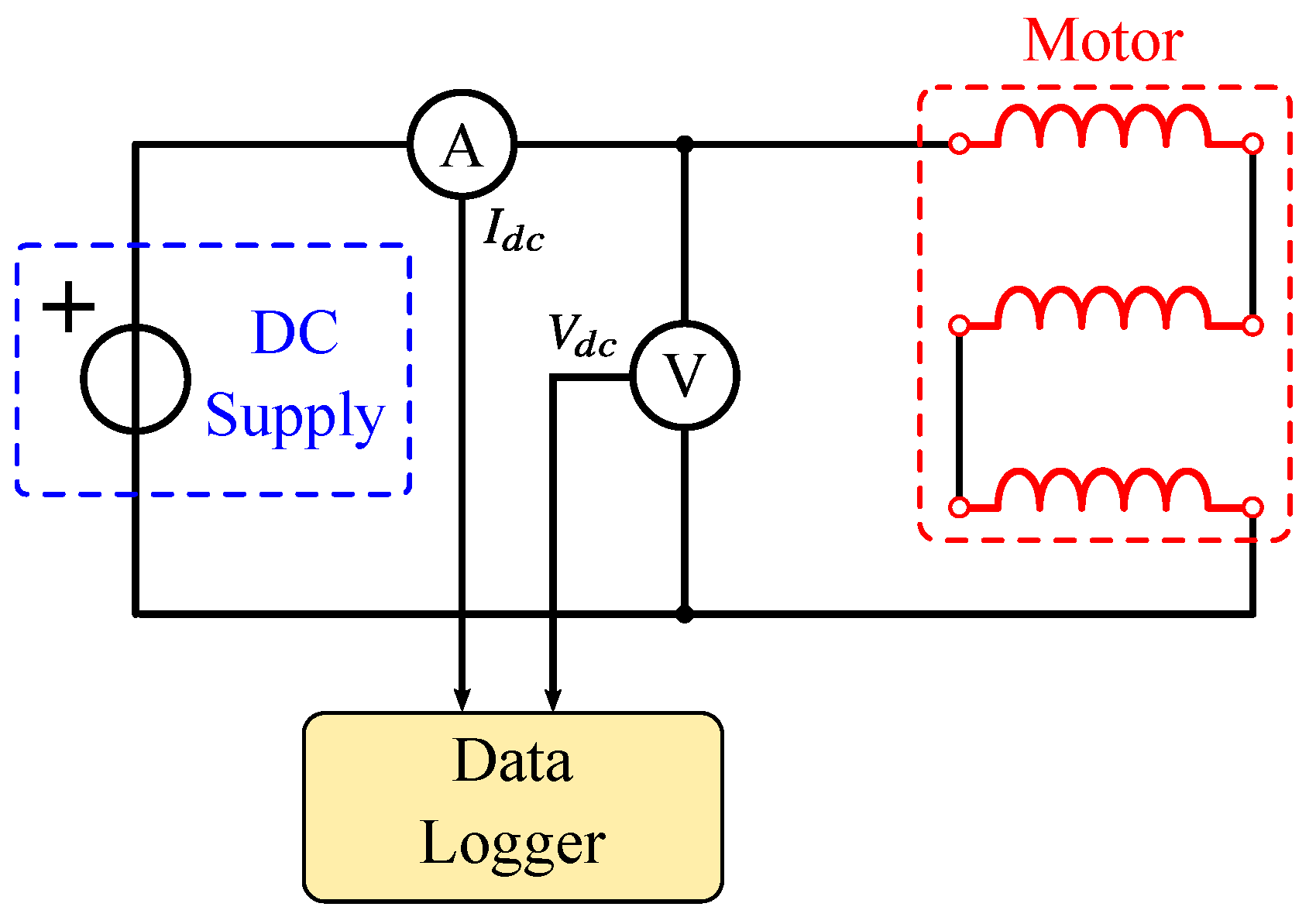
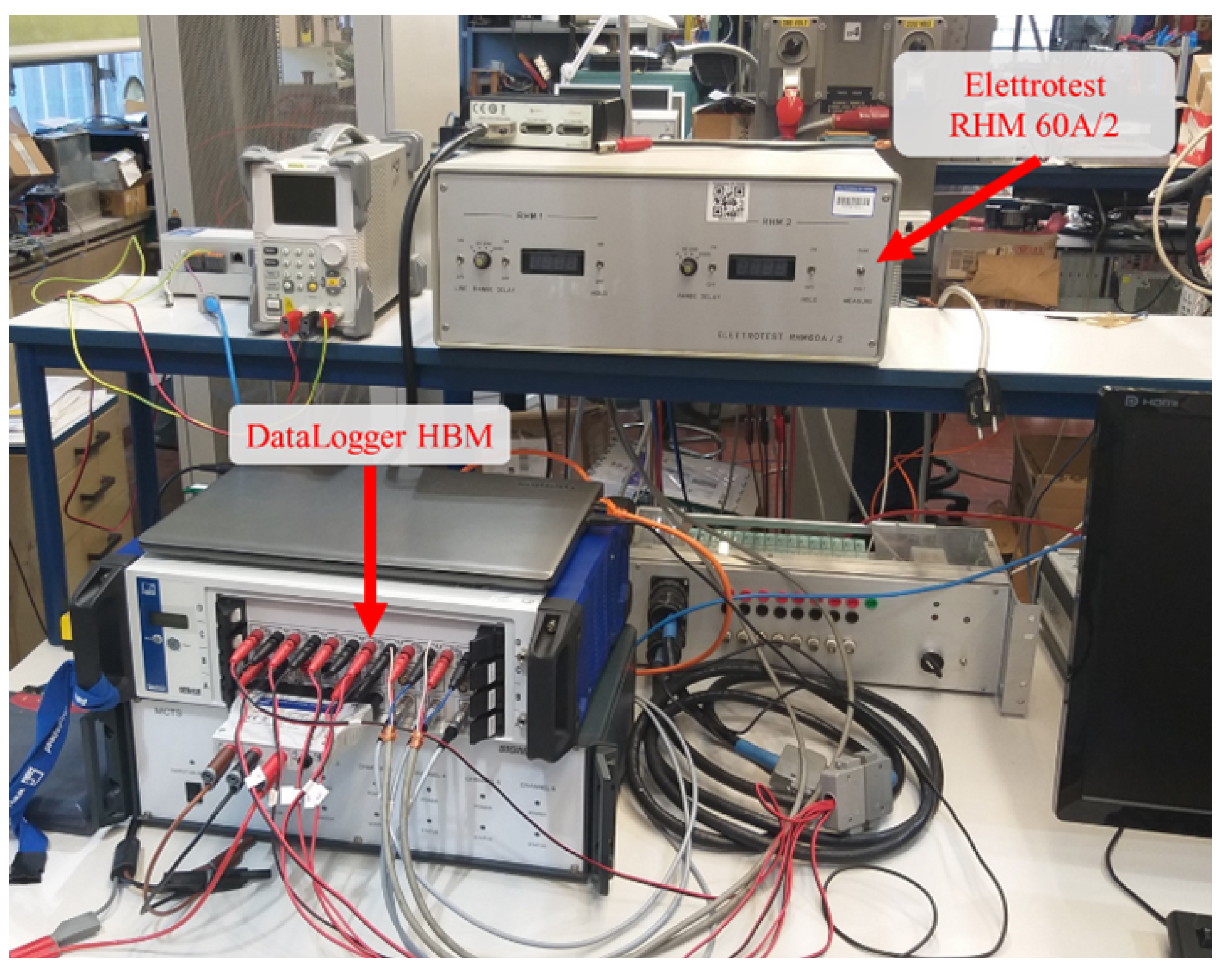
In order to confirm the author’s hypothesis by means of experimental approach, the load test has been repeated, using a specific instrument that can measure the winding resistance injecting a very small DC current while a three-phase motor is running connected to the grid. The used instrument, shown in
Figure 8, is an Elettrotest RHM 60A/2 [
19]. It is important to underline that the use of the RHM 60A/2 is limited to a sinusoidal supply and it cannot be used with inverter supply.
As shown in
Figure 9, a 2-channel resistance meter has been used, with three inlets and three outlets for power supply (for AC decoupling) and two measurement channels (RHM1 and RHM2), each made up of two injection (INJ) and reading (SENSE) terminals. The measure resistance is provided by the external display on the front panel and by an analog signal in the rear panel. The analog signal was used to connect the signal to the data logger HBM Gen4tb. In this way, the complete evolution of the winding resistance can be recorded and consequently its temperature transient.
The results of the new load test are shown in
Figure 10 and
Figure 11, where it is well evident the excellent agreement between the measured temperatures using RHM60A/2 and the model ones for both the short transients. These results validate the authors’ hypothesis about the time delay introduced by the thermocouple.
It is important to highlight that these results put in evidence as the use of a thermal sensor during temperature transient has to be properly assessed for taking into account its time constant. On the basis of the previous considerations, the temperatures measured using RHM60A/2 has been considered as the reference ones.
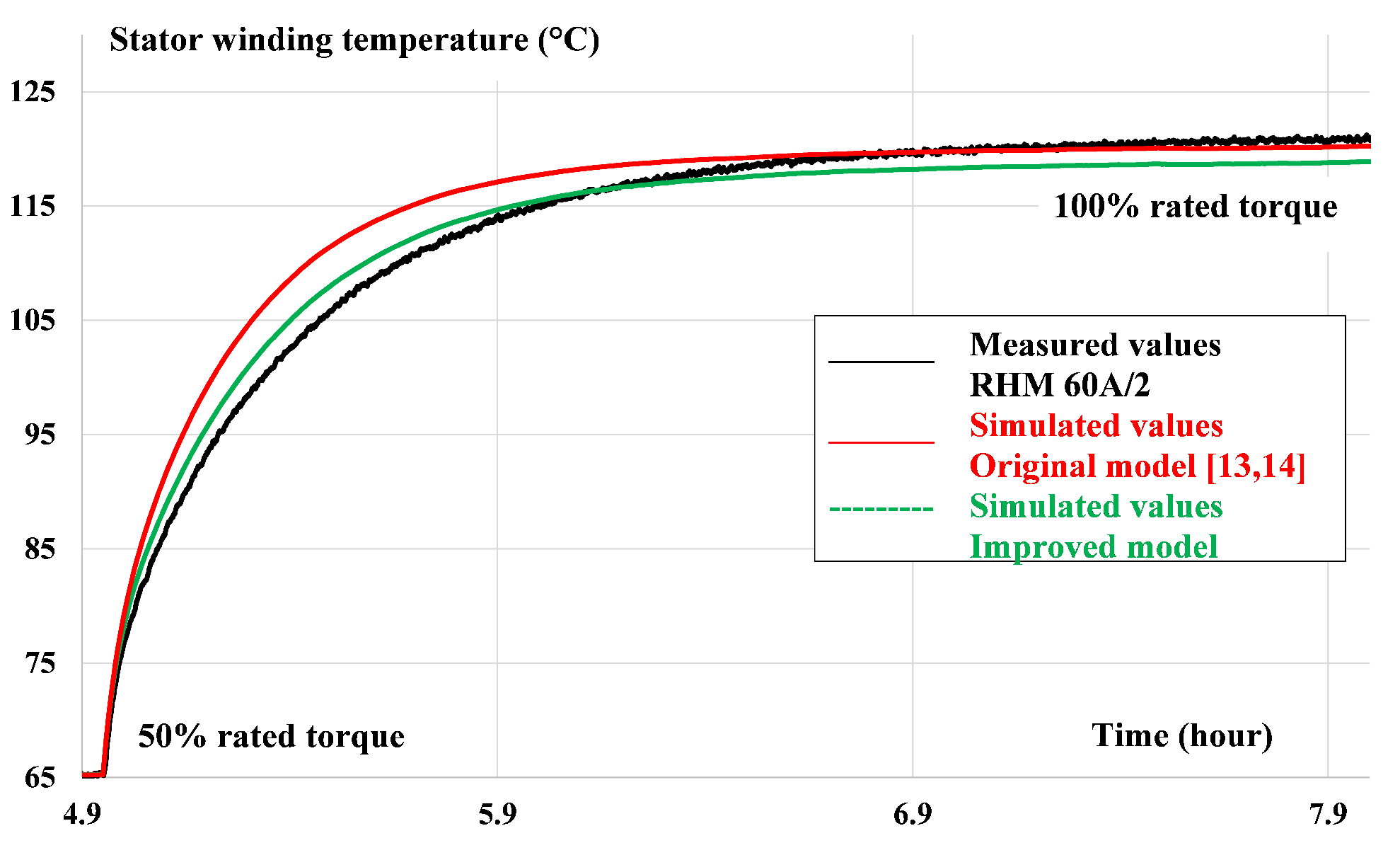
Figure 12 shows the predicted and the measured by RHM60A/2 temperatures. It is well evident the good agreement between the two curves confirming that the proposed second-order thermal model well predicts the winding temperature both in short and in long thermal transients.
4. Second-Order Thermal Model Improvement
As discussed in
Section 3, the second-order thermal model shows good performances both is short transients and steady-state conditions; however,
Figure 12 shows discrepancies during the long time transients. The maximum percentage error is around 5% of the measured temperature in the time interval 5 to 6 h. Consequently, a review of the initially proposed has been considered for improving the accuracy of a second-order thermal model. As discussed in
Section 2, the thermal resistance
takes into account the conduction heat transfer between the stator winding and the lamination; however, the stator winding copper can be divided in two sections. The first one is the copper inside the slots (defined as active conductors) and the second one is the copper due to the end winding. The Joule losses due to the active conductors and the end winding can be separated taking into account the geometrical dimensions of the stator stack shown in
Figure 13 where
D is the average diameter corresponding to the stator slots and
L is the stator stack length.
The resistance of a stator winding coil
is proportional to its length due to the length of the active conductors and the coil external connections
. In first approximation it is possible to write that
where
the number of poles. Let define the shape factor
as
, the ratio between the stator end winding resistance
and the coil resistance
can be considered proportional to
As a consequence, the ratio between the stator end winding Joule losses
and the stator total Joule losses
can be considered proportional to the coefficient
The stator end winding losses
and the slot copper losses
can be written as
The variation of
versus
is reported in
Figure 14 for different values of the pole numbers
.
From the thermal point of view, the copper Joule losses of the slot
move from the slots to the ambient through the stator lamination as shown by the orange arrows in
Figure 15. Due to the fins always present in the rotor short circuit rings, the end winding losses move directly from the end winding copper to the frame due to the forced convection effect, as shown by the red arrows of the same figure.
The previously discussed stator Joule losses due to the end winding have been included in an improved second-order thermal model reported in
Figure 16. A thermal resistance
that takes into account the force convection heat exchange of the end winding has been added between the heat source
and the ambient temperature
.
The new thermal network is still a second-order thermal model and all the thermal parameters can be measured and computed in easy way. If the value
is know (from the stator lamination geometrical data) the value of
can be computed by (
4) and the value of
and
can be computed by (
6). Using the measured values in steady-state condition the value of
can be computed by
It is important to underline that the value of the thermal resistance can be considered constant, because it takes into account the conduction heat transfer and its value has been obtained using the values measured with DC test. During the DC test the rotor speed is equal to zero and since there is not forced convection heat exchange for the end winding. As a consequence, during the DC test, the thermal resistance can be considered equal to infinite and equal to zero. In other words, both the losses and are transferred to the ambient by the stator lamination only. On the base of these considerations the computed value of the thermal resistance can be considered constant.
The temperatures transients with the new thermal model has been computed using a value of equal to 0.5 obtained by the design data of the motor under test.
Comparing the results obtained using the original model of
Figure 12 and the improved ones of
Figure 17 is it evident as the temperatures computed with the improved model better fit the measured ones, even if a discrepancy of 2.1
C (1.61% error) in the steady-state condition at 100% torque can be seen. The response of the improved second-order thermal model is reported in
Figure 18 and
Figure 19, for the short transient for 0 to 50% and 50% to 100% of the rated torque, respectively. It is well evident the good agreement between the measured and the predicted temperatures in both the transients. In particular, comparing the results shown in
Figure 11 and
Figure 19 for the transient 50% to 100% is evident the better performance of the improved model with respect to the original one.
The results obtained with the original model [
13,
14] and the proposed improved one are highlighted in
Figure 20, where the two models have been simulated and compared with the experimental measurements during both thermal transients (50% and 100% of the rated torque). Moreover, to further show the improvement of the proposed model during the thermal transient, a magnification of
Figure 20 is available in
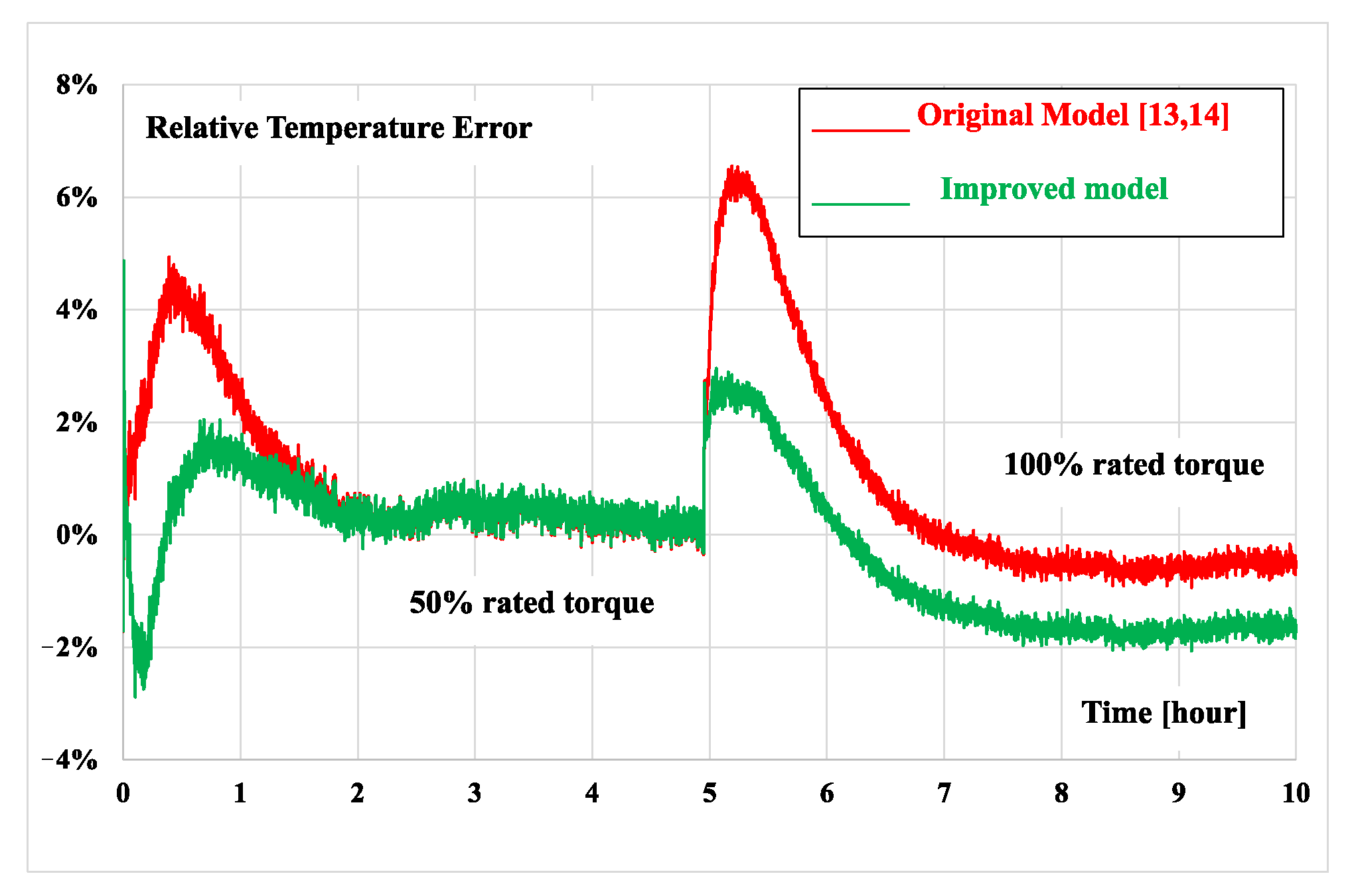
Figure 21, with a focus on the second transient (50% to 100% of the rated torque). The improvement is also quantified in
Figure 22, where the relative temperature estimation error is displayed for the original and the improved model. It can be clearly seen that the percentual error during the transient is roughly halved using the proposed model, at the cost of a slightly larger error at steady state. Finally, the thermal parameters of the original model and the improved one are listed in
Table 2.
5. Considerations for a Correct Use of the Model
The results discussed in this paper have shown that a second-order model can represent a viable solution for the thermal prediction of an electrical machine in a time interval that starts from a short transient where only the stator winding is involved up to the thermal steady-state condition. Two second-order thermal models have been compared. The first one does not include the forced convection heat exchange in the end winding and shows an excellent accuracy in predicting the steady-state temperature but a worse fitting accuracy during the long temperature transient. The improved model allows and excellent temperature fitting during the long transient but it has a worse accuracy in the prediction of the steady-state temperature. Anyway the maximum temperature errors found in both the models are lower than the 2% and the authors consider this results as an excellent one taking into account how complex is the thermal system and how simple are the proposed models. Even if the proposed second model thermal models have been calibrated and validated on a TEFC induction motor, the models can be used in all the electrical machines with distributed windings taking into account the following considerations.
Electrical machines with natural convection or constant fluid cooling: The proposed models can be used excluding the thermal resistances while has to be included in induction motor because the ventilation fins are present in short circuit rings only.
Electrical machines with separated/assisted ventilation (separated/assisted forces convection cooling): The thermal models can be used as they are. is constant because the force convection cooling is constant and does not depend on the rotor speed.
Electrical machines with self ventilation (self-forced convection cooling) (TEFC motors): The model can be uses as they are, but
and
will be depending on the rotor speed. In order to evaluate the variation of the two thermal resistances depending on the motor speed, load tests at different supply frequency have been performed. Since a reduction in the speed corresponds to a reduction in the cooling air speed the load torque has been reduced for avoiding a winding over temperature. The obtained values are reported in
Table 3 where is well evident the increase in the thermal resistances values with the reduction in the frequency.
Figure 23 shows the variation of the thermal resistances
and
with the supply frequency. Even if it is possible to find an equation for correlating the values, this equation cannot be considered of general validity. Consequently, the values have to be measured motor by motor. As a final consideration the authors have used a TEFC induction motor for the definition of a second-order thermal model well aware that that motor is the most complex for the thermal point of view. Taking into account that TEFC induction motors are the most complex from the thermal analysis point of view (forced convention on the frame, rotor Joule losses in the cage), the good results obtained on the TEFC induction motor guarantee that the proposed thermal model can be extended to other motor typologies.


 ,
, 
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}