
A Sensitivity Matrix Approach Using Two-Stage Optimization for Voltage Regulation of LV Networks with High PV Penetration

 , and
, and 
Abstract
:
1. Introduction
- A novel PV-power to voltage Sensitivity Matrix (SM) for LVDGs was developed using line parameters accounting for the voltage variations in the secondary side;
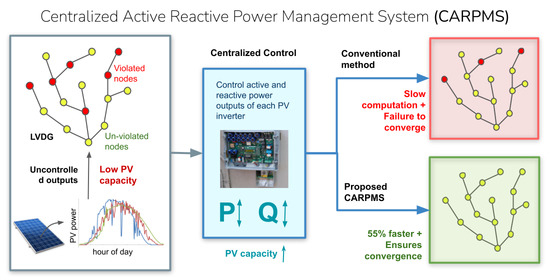
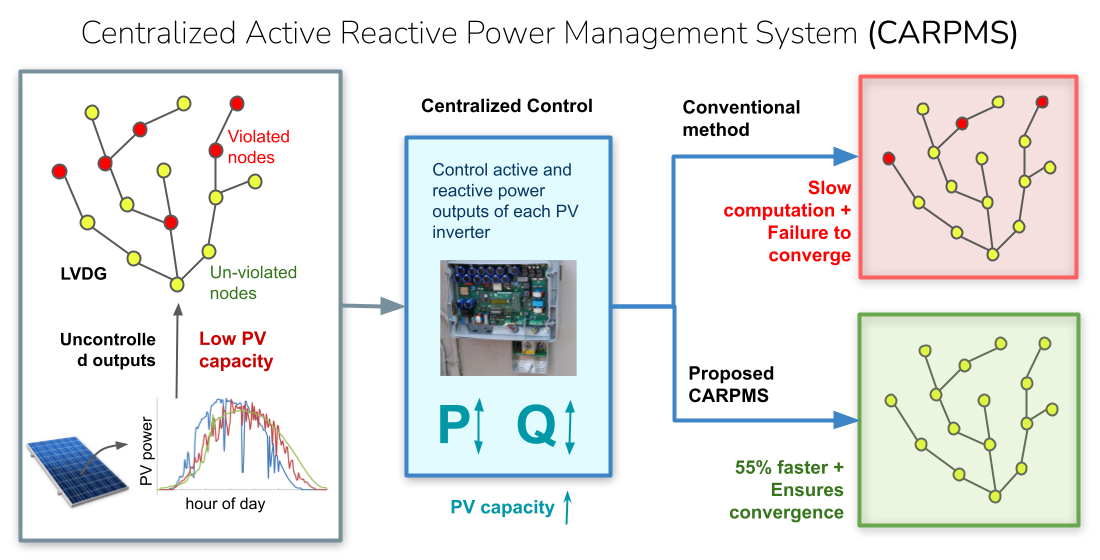
- A Centralized Active, Reactive Power Management System (CARPMS) using this SM for voltage violations in LVDGs is proposed;
- A modified two-stage optimization process is proposed, with the Feasible Region Search (FRS) as an efficient space reduction algorithm to decrease the computational time and ensure convergence of the PSO optimizer that follows it.
2. Methodology
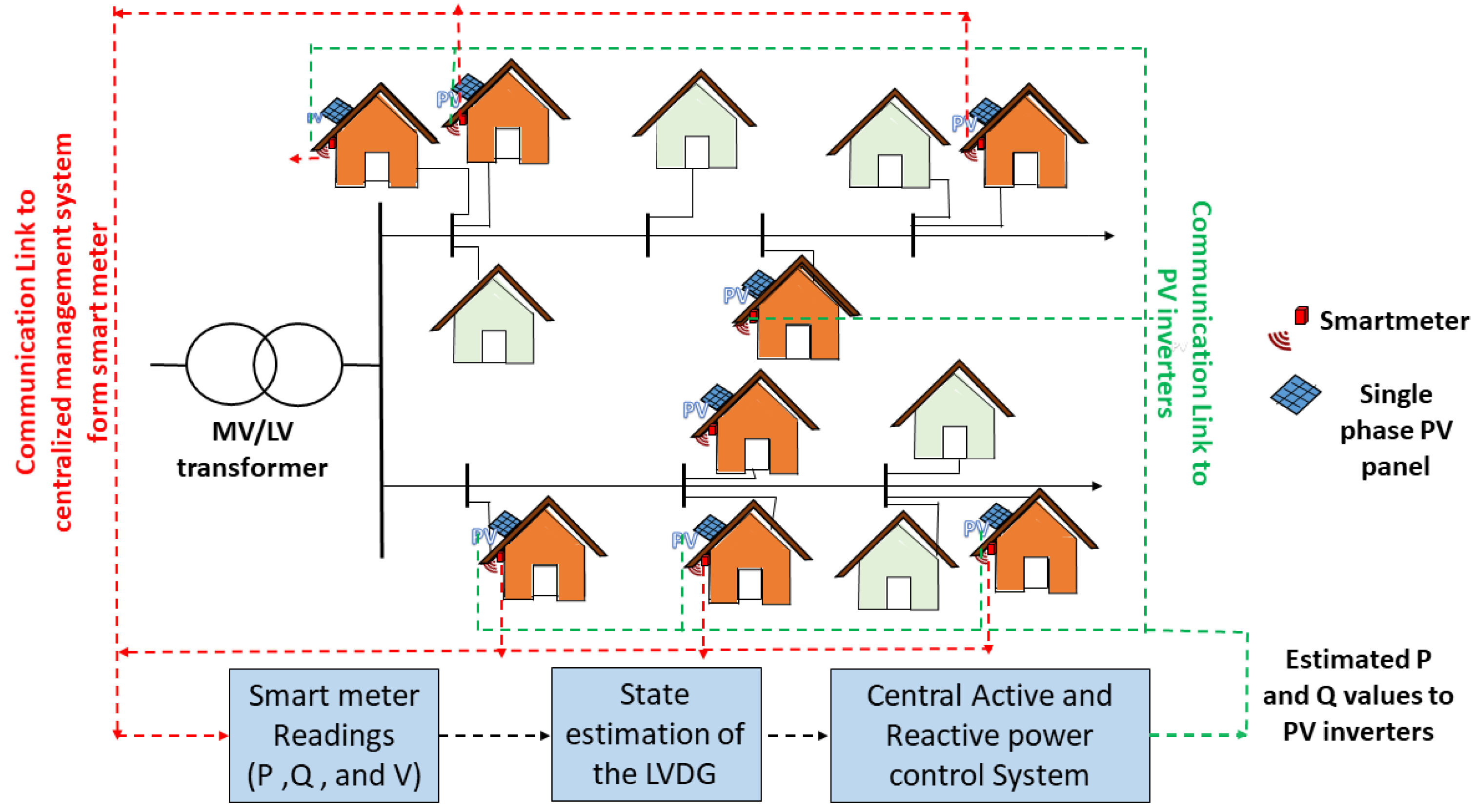
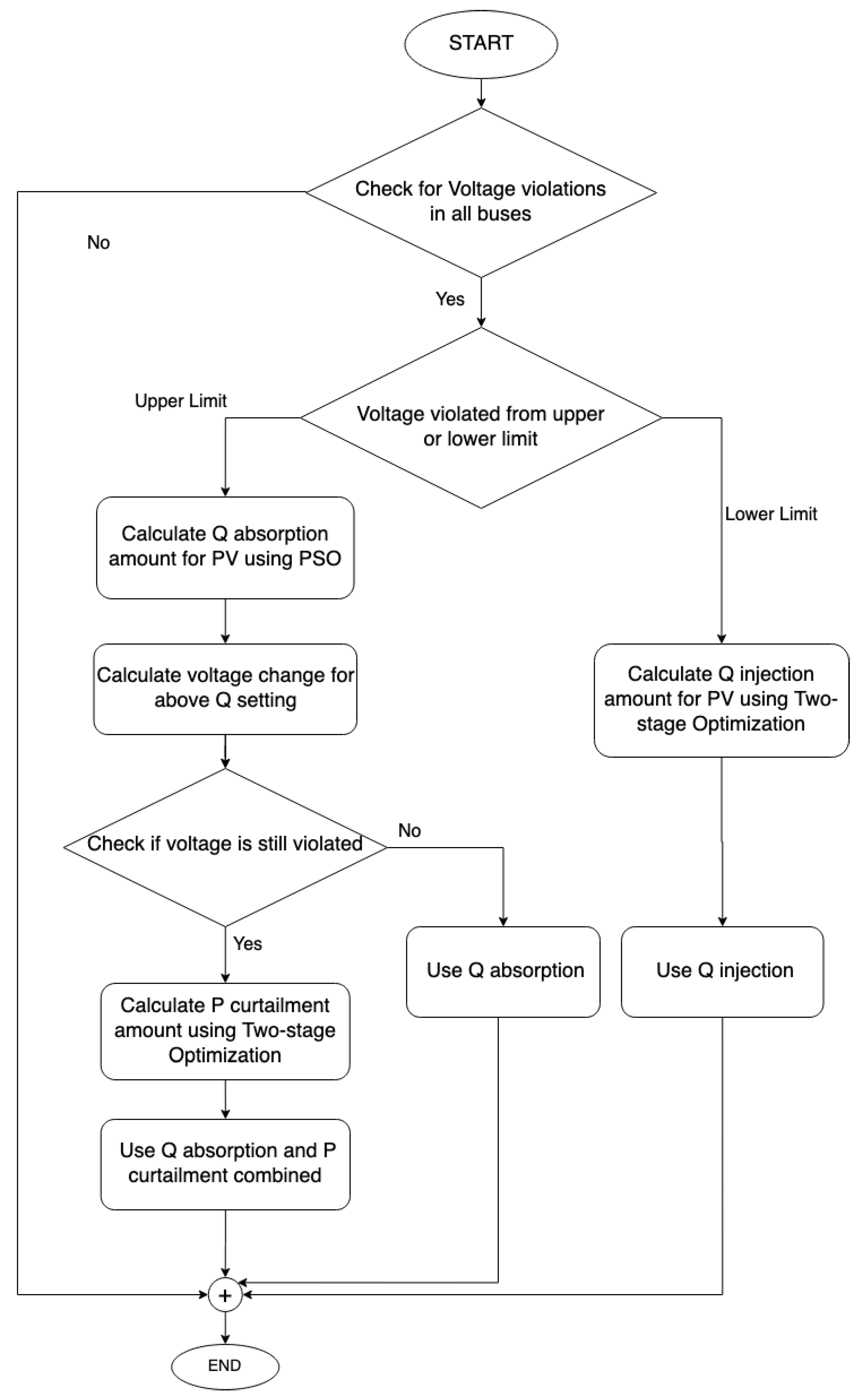
2.1. Centralized Active, Reactive Power Management System
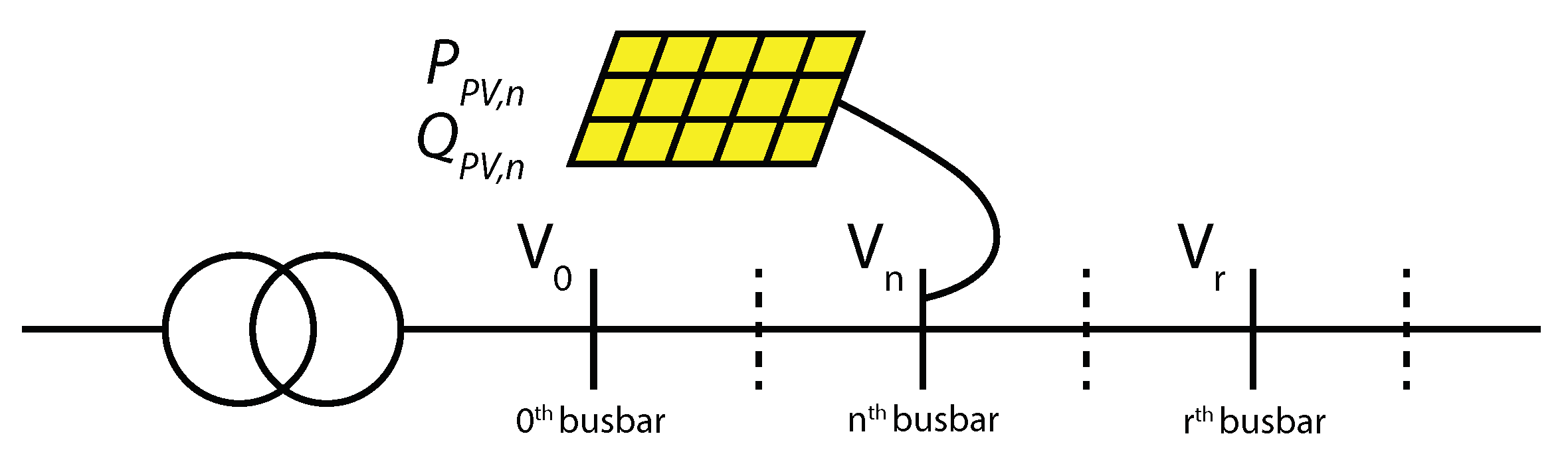
2.2. Voltage Sensitivity Derivation for the Distribution Line
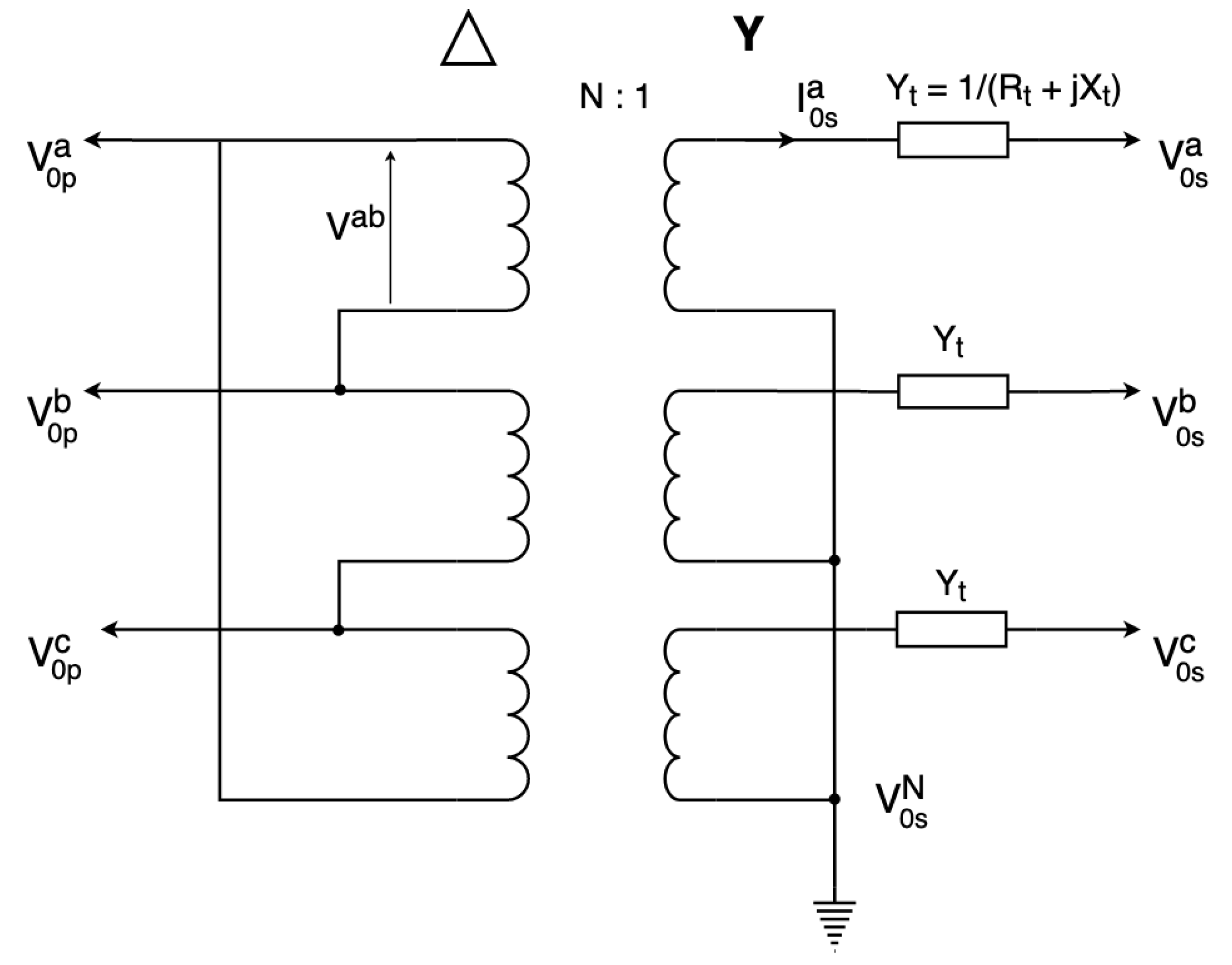
2.3. Voltage Sensitivity Derivation at the Transformer End
2.4. Combined Sensitivity Matrix Model
3. Problem Formulation
3.1. Optimization of Reactive Power Control
- 1.
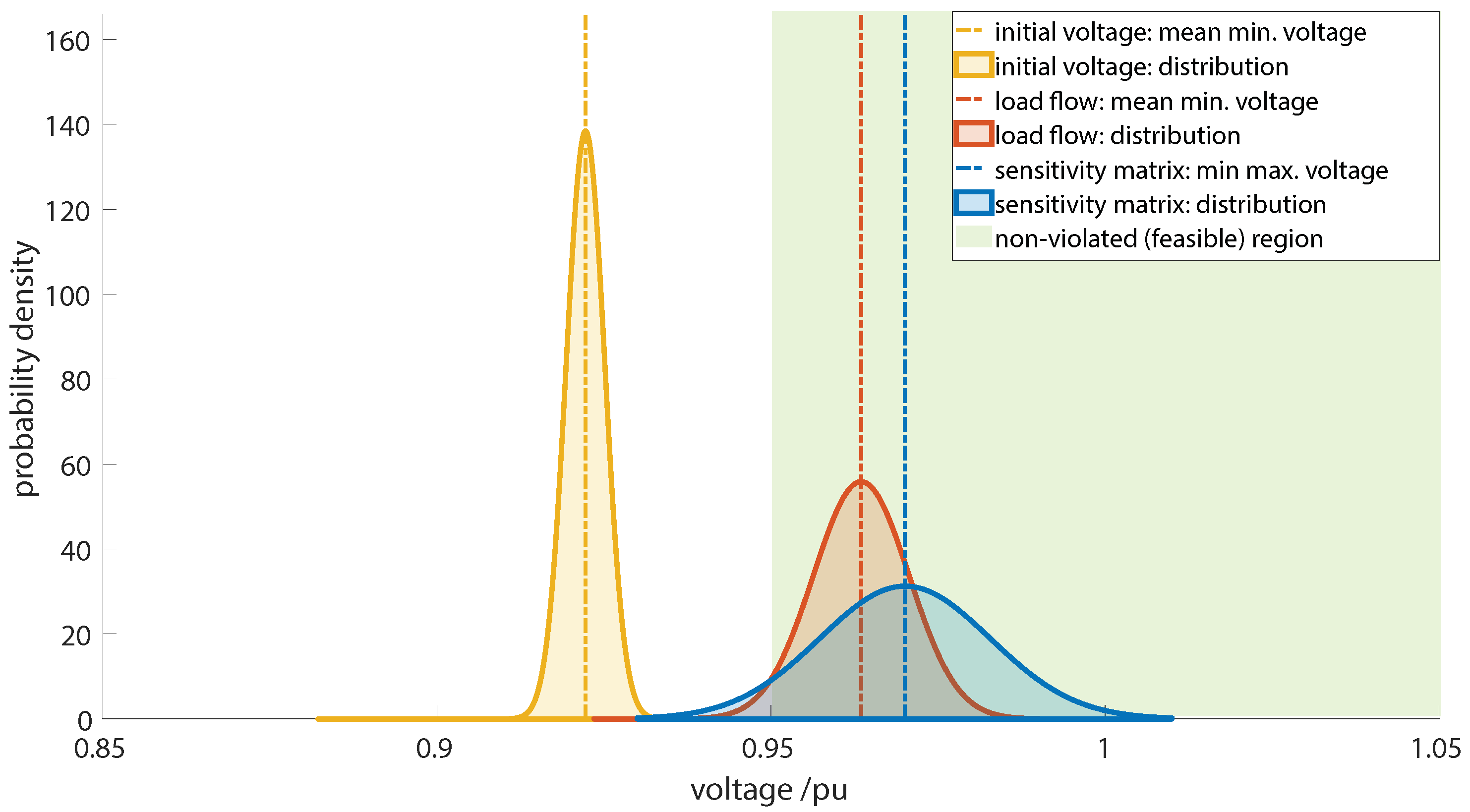
- The voltage of the node should be within the specified upper and lower limits given by,where and are the accepted lower (0.95 p.u) and upper limit (1.05 p.u) voltages in LVDG systems, respectively, is the calculated voltage of the nodes using optimization variables and is the estimated voltage change due to changes in P and Q of the PV systems;
- 2.
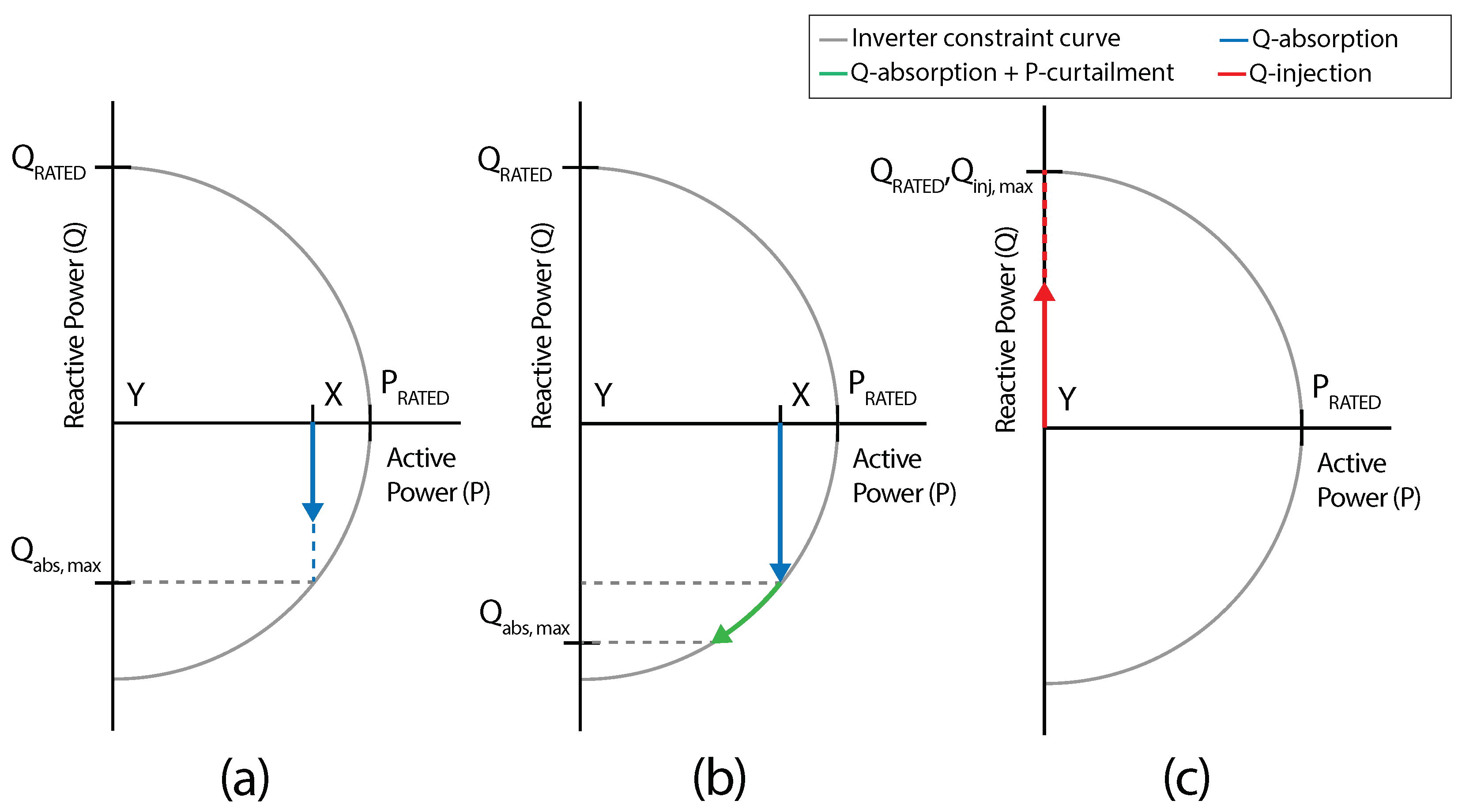
- The inverter constraints given below should be satisfied,
3.2. Optimization of Active Power Curtailment
- 1.
- The voltage of the nodes should be within the specified upper and lower limits as in (12);
- 2.
- The inverter constraint given below should be satisfied,
4. Two-Stage Optimization
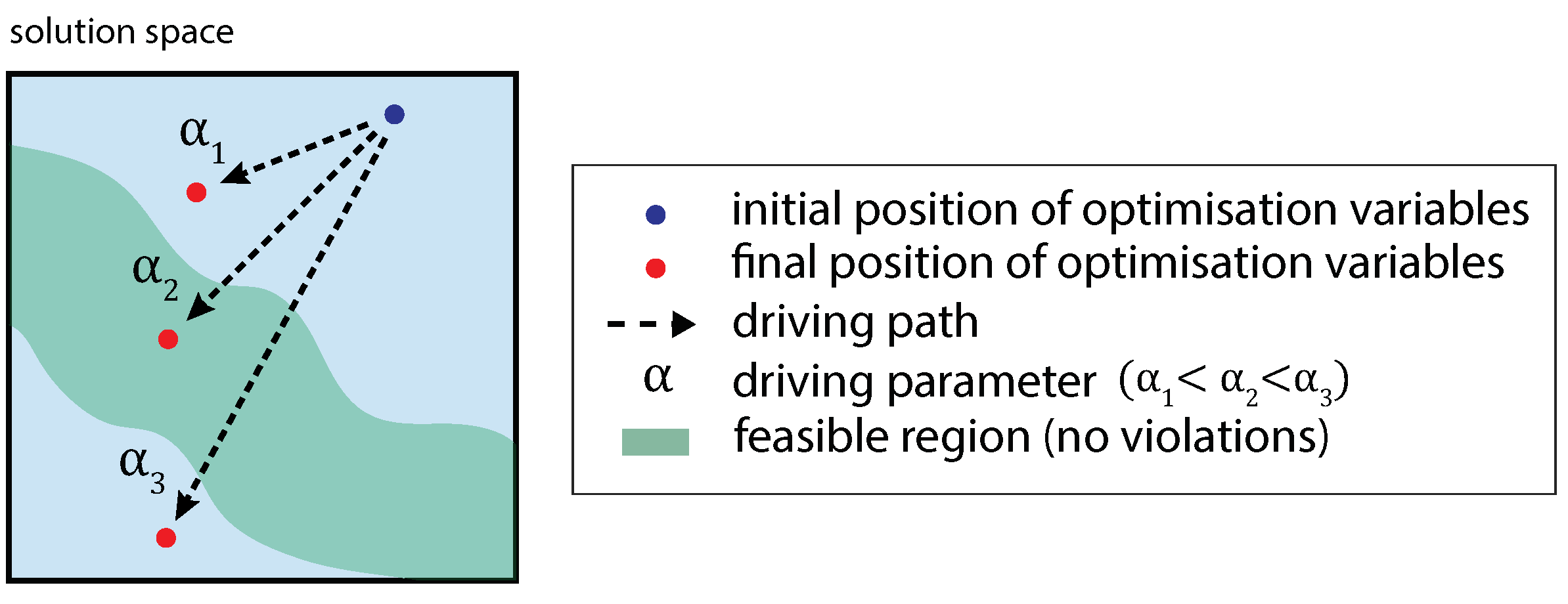
- Feasible Region Search (FRS);
- Particle Swarm Optimization (PSO).
4.1. Feasible Region Search
4.2. Particle Swarm Optimization
| Algorithm 1: Steps of PSO. |
|
4.3. Primary Steps of Particle Swarm Optimization
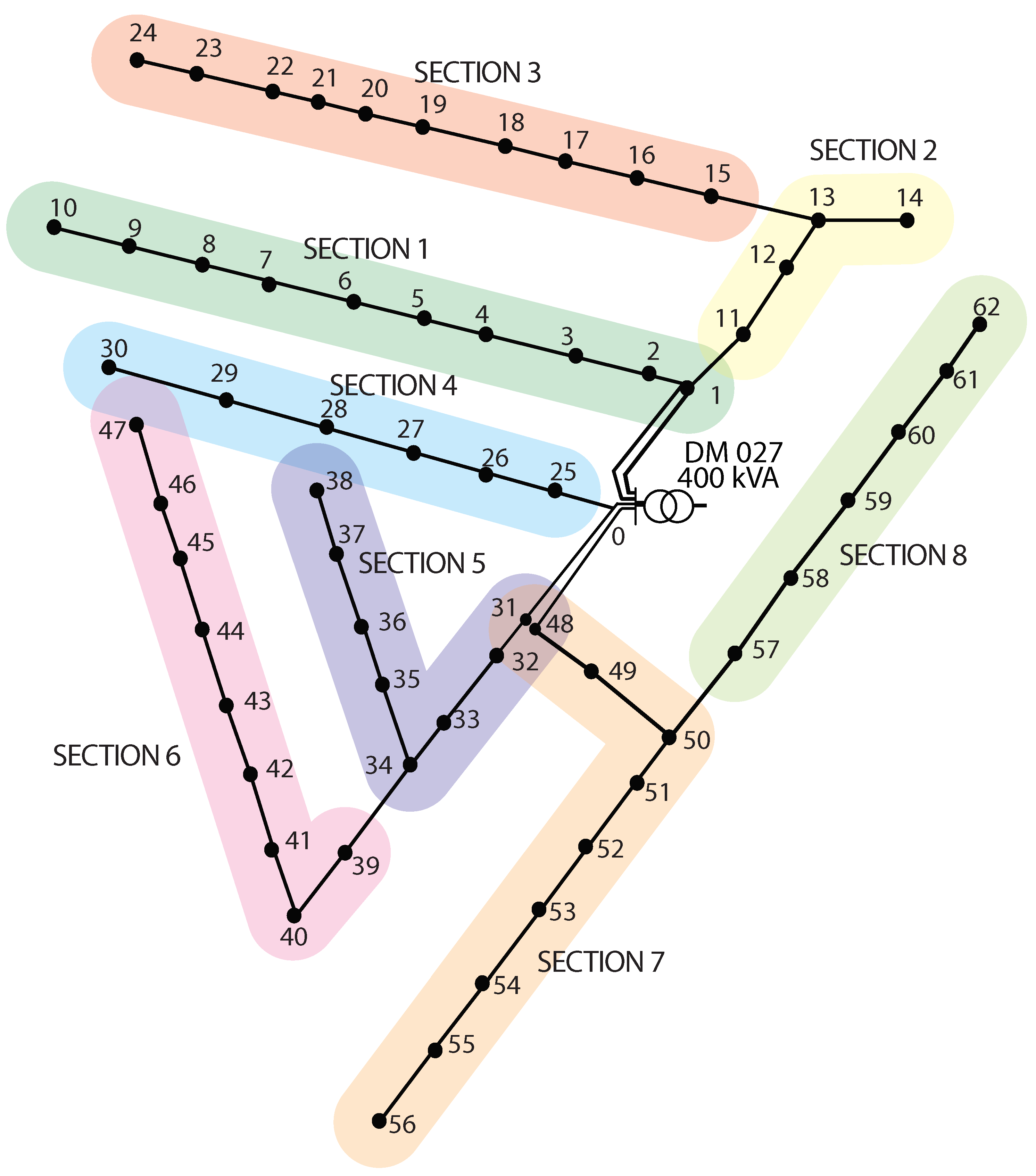
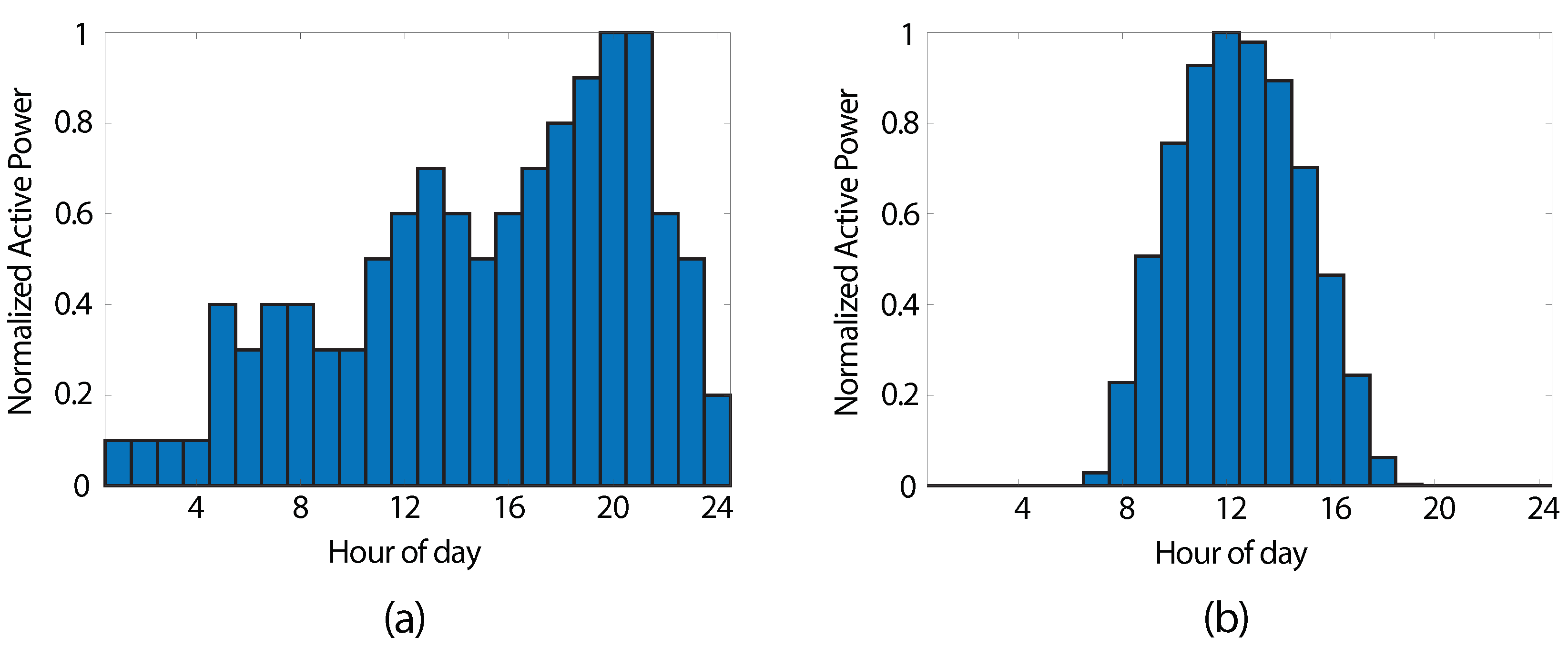
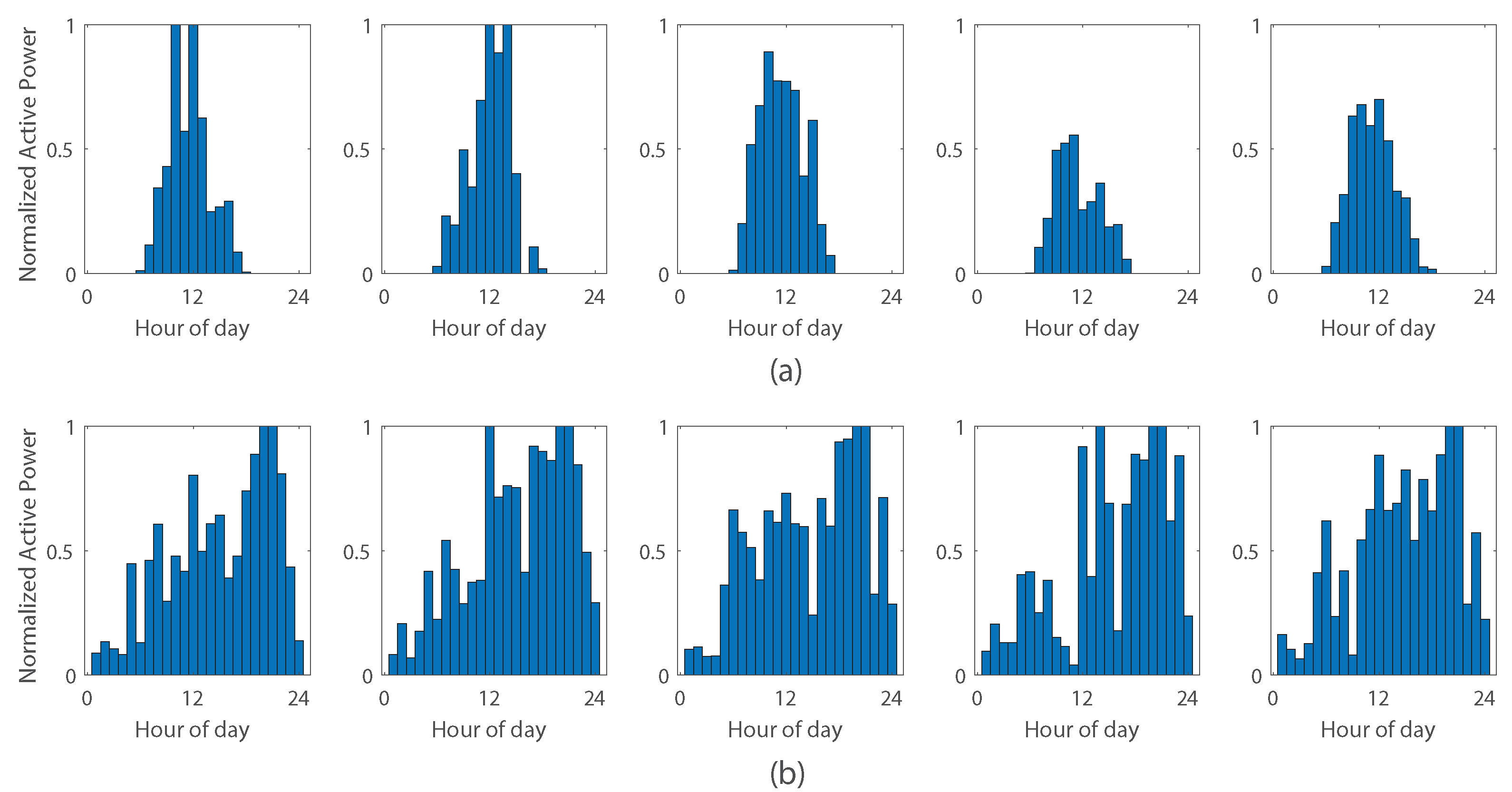
5. Case Study
6. Results and Discussion
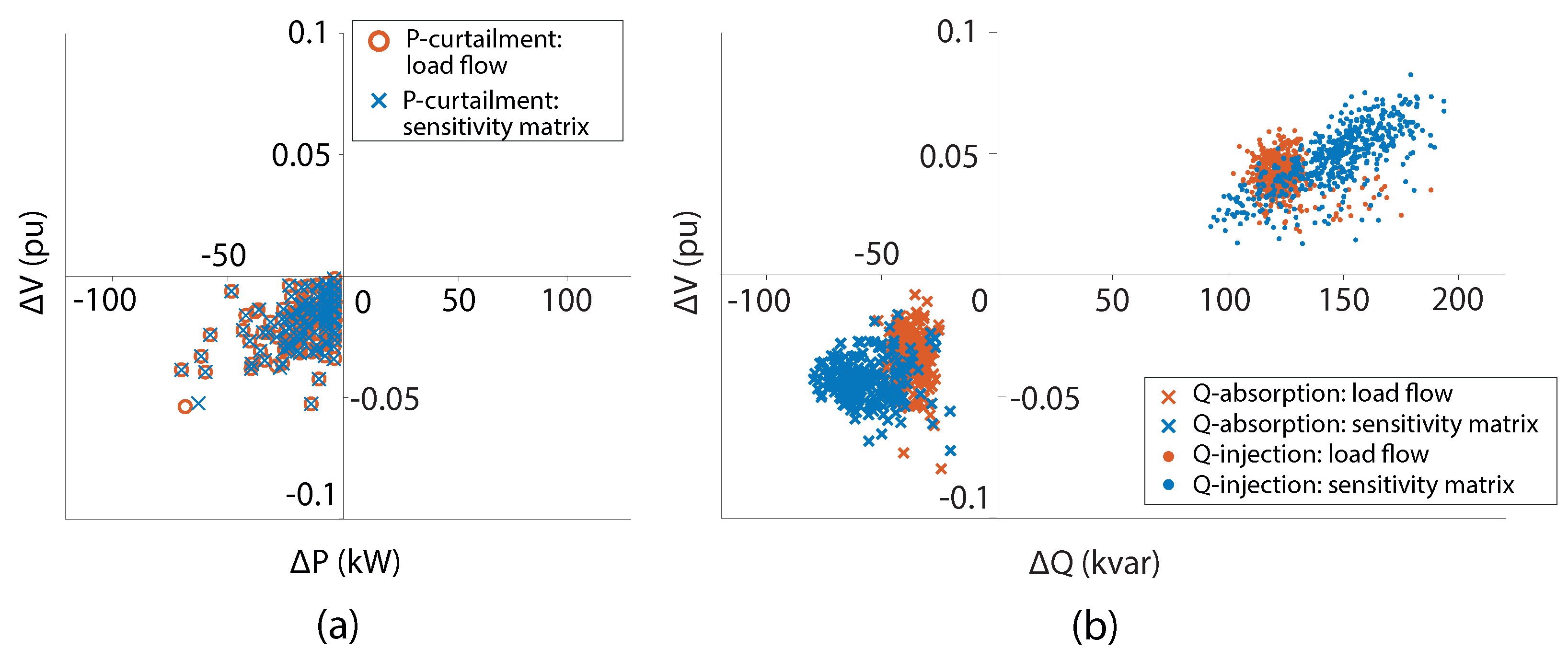
6.1. Validation of the Sensitivity Matrix
6.2. Feasible Region Search for Optimization
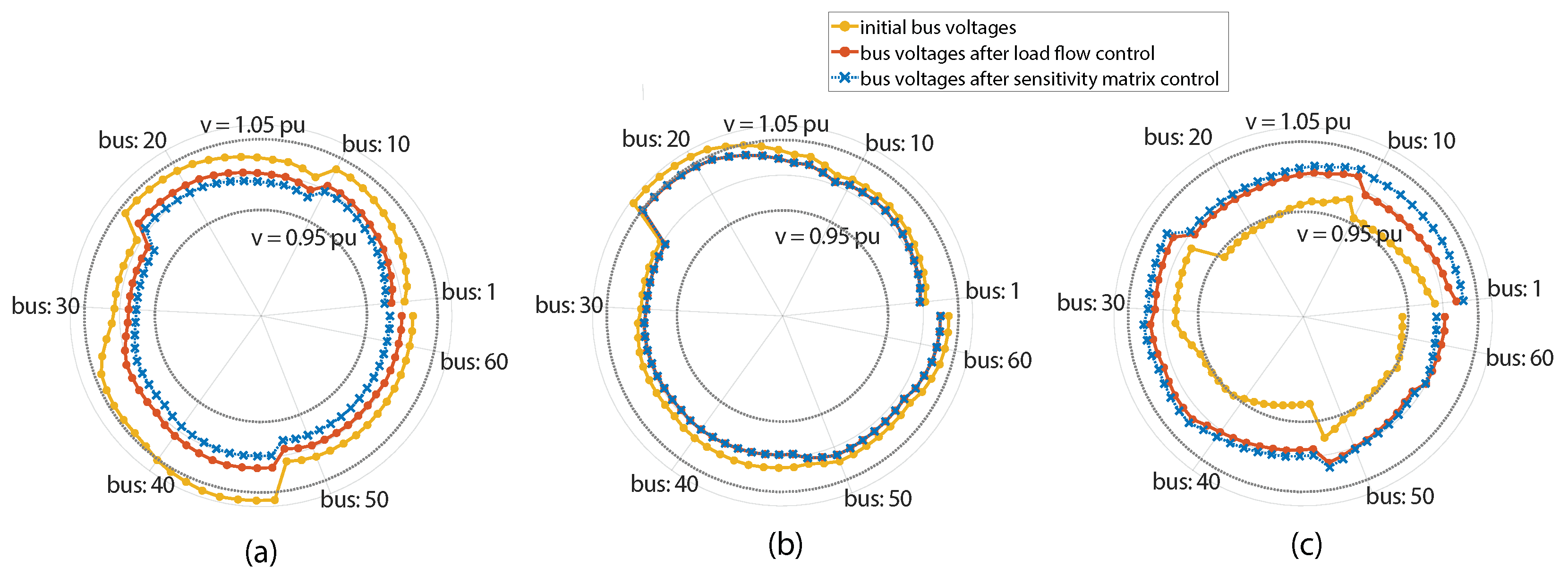
6.3. Two-Stage Optimization and Proposed Sensitivity Matrix
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- U.S. Energy Information Administration. Annual Energy Outlook. Available online: https://www.eia.gov/outlooks/aeo/ (accessed on 6 November 2020).
- Almeida, D.W.; Abeysinghe, A.H.M.S.M.S.; Ekanayake, J.B. Analysis of rooftop solar impacts on distribution networks. Ceylon J. Sci. 2019, 48, 103–112. [Google Scholar] [CrossRef] [Green Version]
- Hamilton, J.; Negnevitsky, M.; Wang, X.; Lyden, S. High penetration renewable generation within Australian isolated and remote power systems. Energy 2019, 168, 684–692. [Google Scholar] [CrossRef]
- Colantuono, G.; Kor, A.L.; Pattinson, C.; Gorse, C. PV with multiple storage as function of geolocation. Sol. Energy 2018, 165, 217–232. [Google Scholar] [CrossRef] [Green Version]
- Walling, R.A.; Saint, R.; Dugan, R.C.; Burke, J.; Kojovic, L.A. Summary of Distributed Resources Impact on Power Delivery Systems. IEEE Trans. Power Deliv. 2008, 23, 1636–1644. [Google Scholar] [CrossRef]
- Akeyo, O.M.; Patrick, A.; Ionel, D.M. Study of Renewable Energy Penetration on a Benchmark Generation and Transmission System. Energies 2021, 14, 169. [Google Scholar] [CrossRef]
- Ma, C.; Dasenbrock, J.; Töbermann, J.C.; Braun, M. A novel indicator for evaluation of the impact of distributed generations on the energy losses of low voltage distribution grids. Appl. Energy 2019, 242, 674–683. [Google Scholar] [CrossRef]
- Tonkoski, R.; Turcotte, D.; EL-Fouly, T.H.M. Impact of High PV Penetration on Voltage Profiles in Residential Neighborhoods. IEEE Trans. Sustain. Energy 2012, 3, 518–527. [Google Scholar] [CrossRef]
- Chaminda Bandara, W.; Godaliyadda, G.; Ekanayake, M.; Ekanayake, J. Coordinated photovoltaic re-phasing: A novel method to maximize renewable energy integration in low voltage networks by mitigating network unbalances. Appl. Energy 2020, 280, 116022. [Google Scholar] [CrossRef]
- Ma, C.; Menke, J.H.; Dasenbrock, J.; Braun, M.; Haslbeck, M.; Schmid, K.H. Evaluation of energy losses in low voltage distribution grids with high penetration of distributed generation. Appl. Energy 2019, 256, 113907. [Google Scholar] [CrossRef]
- Yaghoobi, J.; Islam, M.; Mithulananthan, N. Analytical approach to assess the loadability of unbalanced distribution grid with rooftop PV units. Appl. Energy 2018, 211, 358–367. [Google Scholar] [CrossRef]
- Almeida, D.; Abeysinghe, S.; Ekanayake, M.P.; Godaliyadda, R.I.; Ekanayake, J.; Pasupuleti, J. Generalized approach to assess and characterise the impact of solar PV on LV networks. Int. J. Electr. Power Energy Syst. 2020, 121, 106058. [Google Scholar] [CrossRef]
- Aziz, T.; Ketjoy, N. PV penetration limits in low voltage networks and voltage variations. IEEE Access 2017, 5, 16784–16792. [Google Scholar] [CrossRef]
- Shahnia, F.; Majumder, R.; Ghosh, A.; Ledwich, G.; Zare, F. Voltage imbalance analysis in residential low voltage distribution networks with rooftop PVs. Electr. Power Syst. Res. 2011, 81, 1805–1814. [Google Scholar] [CrossRef]
- Hashemi, S.; Østergaard, J.; Degner, T.; Brandl, R.; Heckmann, W. Efficient Control of Active Transformers for Increasing the PV Hosting Capacity of LV Grids. IEEE Trans. Ind. Inform. 2017, 13, 270–277. [Google Scholar] [CrossRef] [Green Version]
- Yorino, N.; Zoka, Y.; Watanabe, M.; Kurushima, T. An Optimal Autonomous Decentralized Control Method for Voltage Control Devices by Using a Multi-Agent System. IEEE Trans. Power Syst. 2015, 30, 2225–2233. [Google Scholar] [CrossRef]
- Christakou, K.; Paolone, M.; Abur, A. Voltage Control in Active Distribution Networks Under Uncertainty in the System Model: A Robust Optimization Approach. IEEE Trans. Smart Grid 2018, 9, 5631–5642. [Google Scholar] [CrossRef]
- Payne, J.; Gu, F.; Razeghi, G.; Brouwer, J.; Samuelsen, S. Dynamics of high penetration photovoltaic systems in distribution circuits with legacy voltage regulation devices. Int. J. Electr. Power Energy Syst. 2021, 124, 106388. [Google Scholar] [CrossRef]
- Xie, Q.; Shentu, X.; Wu, X.; Ding, Y.; Hua, Y.; Cui, J. Coordinated voltage regulation by on-load tap changer operation and demand response based on voltage ranking search algorithm. Energies 2019, 12, 1902. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Lin, C.; Hsieh, W.; Hsu, C.; Ku, T. Enhancement of PV Penetration With DSTATCOM in Taipower Distribution System. IEEE Trans. Power Syst. 2013, 28, 1560–1567. [Google Scholar] [CrossRef]
- Arshad, A.; Püvi, V.; Lehtonen, M. Monte Carlo-based comprehensive assessment of PV hosting capacity and energy storage impact in realistic finnish low-voltage networks. Energies 2018, 11, 1467. [Google Scholar] [CrossRef] [Green Version]
- Zhao, B.; Ren, J.; Chen, J.; Lin, D.; Qin, R. Tri-level robust planning-operation co-optimization of distributed energy storage in distribution networks with high PV penetration. Appl. Energy 2020, 279, 115768. [Google Scholar] [CrossRef]
- Ma, Y.; Azuatalam, D.; Power, T.; Chapman, A.C.; Verbič, G. A novel probabilistic framework to study the impact of photovoltaic-battery systems on low-voltage distribution networks. Appl. Energy 2019, 254, 113669. [Google Scholar] [CrossRef]
- Alzahrani, A.; Alharthi, H.; Khalid, M. Minimization of power losses through optimal battery placement in a distributed network with high penetration of photovoltaics. Energies 2020, 13, 140. [Google Scholar] [CrossRef] [Green Version]
- Mak, D.; Choi, D.H. Hierarchical look-ahead conservation voltage reduction framework considering distributed energy resources and demand reduction. Energies 2018, 11, 3250. [Google Scholar] [CrossRef] [Green Version]
- Al-Saffar, M.; Musilek, P. Reinforcement Learning-Based Distributed BESS Management for Mitigating Overvoltage Issues in Systems With High PV Penetration. IEEE Trans. Smart Grid 2020, 11, 2980–2994. [Google Scholar] [CrossRef]
- Tonkoski, R.; Lopes, L.A.C.; El-Fouly, T.H.M. Coordinated Active Power Curtailment of Grid Connected PV Inverters for Overvoltage Prevention. IEEE Trans. Sustain. Energy 2011, 2, 139–147. [Google Scholar] [CrossRef]
- Tonkoski, R.; Lopes, L.A. Impact of active power curtailment on overvoltage prevention and energy production of PV inverters connected to low voltage residential feeders. Renew. Energy 2011, 36, 3566–3574. [Google Scholar] [CrossRef] [Green Version]
- Alyami, S.; Wang, Y.; Wang, C.; Zhao, J.; Zhao, B. Adaptive Real Power Capping Method for Fair Overvoltage Regulation of Distribution Networks With High Penetration of PV Systems. IEEE Trans. Smart Grid 2014, 5, 2729–2738. [Google Scholar] [CrossRef]
- Howlader, A.M.; Sadoyama, S.; Roose, L.R.; Chen, Y. Active power control to mitigate voltage and frequency deviations for the smart grid using smart PV inverters. Appl. Energy 2020, 258, 114000. [Google Scholar] [CrossRef]
- Latif, A.; Gawlik, W.; Palensky, P. Quantification and mitigation of unfairness in active power curtailment of rooftop photovoltaic systems using sensitivity based coordinated control. Energies 2016, 9, 436. [Google Scholar] [CrossRef] [Green Version]
- Nousdilis, A.I.; Christoforidis, G.C.; Papagiannis, G.K. Active power management in low voltage networks with high photovoltaics penetration based on prosumers’ self-consumption. Appl. Energy 2018, 229, 614–624. [Google Scholar] [CrossRef]
- Weckx, S.; Gonzalez, C.; Driesen, J. Combined Central and Local Active and Reactive Power Control of PV Inverters. IEEE Trans. Sustain. Energy 2014, 5, 776–784. [Google Scholar] [CrossRef]
- Ghosh, S.; Rahman, S.; Pipattanasomporn, M. Local distribution voltage control by reactive power injection from PV inverters enhanced with active power curtailment. In Proceedings of the 2014 IEEE PES General Meeting| Conference & Exposition, Washington, DC, USA, 27–31 July 2014; IEEE: New York, NY, USA, 2014; pp. 1–5. [Google Scholar]
- Calderaro, V.; Conio, G.; Galdi, V.; Massa, G.; Piccolo, A. Optimal Decentralized Voltage Control for Distribution Systems With Inverter-Based Distributed Generators. IEEE Trans. Power Syst. 2014, 29, 230–241. [Google Scholar] [CrossRef]
- Zhu, H.; Liu, H.J. Fast Local Voltage Control Under Limited Reactive Power: Optimality and Stability Analysis. IEEE Trans. Power Syst. 2016, 31, 3794–3803. [Google Scholar] [CrossRef]
- Wang, X.; Wang, C.; Xu, T.; Guo, L.; Li, P.; Yu, L.; Meng, H. Optimal voltage regulation for distribution networks with multi-microgrids. Appl. Energy 2018, 210, 1027–1036. [Google Scholar] [CrossRef]
- Gandhi, O.; Zhang, W.; Rodríguez-Gallegos, C.D.; Verbois, H.; Sun, H.; Reindl, T.; Srinivasan, D. Local reactive power dispatch optimisation minimising global objectives. Appl. Energy 2020, 262, 114529. [Google Scholar] [CrossRef]
- Tina, G.M.; Garozzo, D.; Siano, P. Scheduling of PV inverter reactive power set-point and battery charge/discharge profile for voltage regulation in low voltage networks. Int. J. Electr. Power Energy Syst. 2019, 107, 131–139. [Google Scholar] [CrossRef]
- Jabr, R.A. Robust Volt/VAr Control With Photovoltaics. IEEE Trans. Power Syst. 2019, 34, 2401–2408. [Google Scholar] [CrossRef]
- Zhang, Z.; Dou, C.; Yue, D.; Zhang, B.; Zhao, P. High-economic PV power compensation algorithm to mitigate voltage rise with minimal curtailment. Int. J. Electr. Power Energy Syst. 2021, 125, 106401. [Google Scholar] [CrossRef]
- Zhang, Q.; Dehghanpour, K.; Wang, Z. Distributed CVR in Unbalanced Distribution Systems With PV Penetration. IEEE Trans. Smart Grid 2019, 10, 5308–5319. [Google Scholar] [CrossRef]
- Emarati, M.; Barani, M.; Farahmand, H.; Aghaei, J. A two-level over-voltage control strategy in distribution networks with high PV penetration. Int. J. Electr. Power Energy Syst. 2021, 130, 106763. [Google Scholar] [CrossRef]
- Cheng, Z.; Li, Z.; Liang, J.; Si, J.; Dong, L.; Gao, J. Distributed coordination control strategy for multiple residential solar PV systems in distribution networks. Int. J. Electr. Power Energy Syst. 2020, 117, 105660. [Google Scholar] [CrossRef]
- Singh, S.; Pamshetti, V.B.; Thakur, A.K.; Singh, S. Multistage multiobjective volt/var control for smart grid-enabled CVR with solar PV penetration. IEEE Syst. J. 2020, 15, 2767–2778. [Google Scholar] [CrossRef]
- Ilea, V.; Bovo, C.; Falabretti, D.; Merlo, M.; Arrigoni, C.; Bonera, R.; Rodolfi, M. Voltage control methodologies in active distribution networks. Energies 2020, 13, 3293. [Google Scholar] [CrossRef]
- Wang, L.; Yan, R.; Saha, T.K. Voltage regulation challenges with unbalanced PV integration in low voltage distribution systems and the corresponding solution. Appl. Energy 2019, 256, 113927. [Google Scholar] [CrossRef]
- Nguyen, H.M.; Torres, J.L.R.; Lekić, A.; Pham, H.V. MPC Based Centralized Voltage and Reactive Power Control for Active Distribution Networks. IEEE Trans. Energy Convers. 2021, 36, 1537–1547. [Google Scholar] [CrossRef]
- Marikkar, U.; Hassan, A.S.J.; Maithripala, M.S.; Godaliyadda, R.I.; Ekanayake, P.B.; Ekanayake, J.B. Modified Auto Regressive Technique for Univariate Time Series Prediction of Solar Irradiance. In Proceedings of the 2020 IEEE 15th International Conference on Industrial and Information Systems (ICIIS), Rupnagar, India, 26–28 November 2020; IEEE: New York, NY, USA,, 2020; pp. 22–27. [Google Scholar]
- Chaminda Bandara, W.G.; Almeida, D.; Godaliyadda, R.I.; Ekanayake, M.P.; Ekanayake, J. A complete state estimation algorithm for a three-phase four-wire low voltage distribution system with high penetration of solar PV. Int. J. Electr. Power Energy Syst. 2021, 124, 106332. [Google Scholar] [CrossRef]
- Degefa, M.; Lehtonen, M.; Millar, R.; Alahäivälä, A.; Saarijärvi, E. Optimal voltage control strategies for day-ahead active distribution network operation. Electr. Power Syst. Res. 2015, 127, 41–52. [Google Scholar] [CrossRef] [Green Version]
- Su, X.; Masoum, M.A.S.; Wolfs, P.J. Optimal PV Inverter Reactive Power Control and Real Power Curtailment to Improve Performance of Unbalanced Four-Wire LV Distribution Networks. IEEE Trans. Sustain. Energy 2014, 5, 967–977. [Google Scholar] [CrossRef]
- Jung, J.; Onen, A.; Arghandeh, R.; Broadwater, R.P. Coordinated control of automated devices and photovoltaic generators for voltage rise mitigation in power distribution circuits. Renew. Energy 2014, 66, 532–540. [Google Scholar] [CrossRef]
- Ma, W.; Wang, W.; Chen, Z.; Wu, X.; Hu, R.; Tang, F.; Zhang, W. Voltage regulation methods for active distribution networks considering the reactive power optimization of substations. Appl. Energy 2021, 284, 116347. [Google Scholar] [CrossRef]
- Yang, H.; Liao, J. MF-APSO-Based Multiobjective Optimization for PV System Reactive Power Regulation. IEEE Trans. Sustain. Energy 2015, 6, 1346–1355. [Google Scholar] [CrossRef]
- Mahmoud, K.; Lehtonen, M. Three-level control strategy for minimizing voltage deviation and flicker in PV-rich distribution systems. Int. J. Electr. Power Energy Syst. 2020, 120, 105997. [Google Scholar] [CrossRef]
- Su, X.; Masoum, M.A.S.; Wolfs, P. Comprehensive optimal photovoltaic inverter control strategy in unbalanced three-phase four-wire low voltage distribution networks. IET Gener. Transm. Distrib. 2014, 8, 1848–1859. [Google Scholar] [CrossRef]
- Samadi, A.; Shayesteh, E.; Eriksson, R.; Rawn, B.; Söder, L. Multi-objective coordinated droop-based voltage regulation in distribution grids with PV systems. Renew. Energy 2014, 71, 315–323. [Google Scholar] [CrossRef]
- Zhu, X.; Wang, J.; Mulcahy, D.; Lubkeman, D.L.; Lu, N.; Samaan, N.; Huang, R. Voltage-load sensitivity matrix based demand response for voltage control in high solar penetration distribution feeders. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017; IEEE: New York, NY, USA, 2017; pp. 1–5. [Google Scholar]
- Zhang, Z.; Ochoa, L.F.; Valverde, G. A novel voltage sensitivity approach for the decentralized control of DG plants. IEEE Trans. Power Syst. 2017, 33, 1566–1576. [Google Scholar] [CrossRef] [Green Version]
- Zad, B.B.; Hasanvand, H.; Lobry, J.; Vallée, F. Optimal reactive power control of DGs for voltage regulation of MV distribution systems using sensitivity analysis method and PSO algorithm. Int. J. Electr. Power Energy Syst. 2015, 68, 52–60. [Google Scholar]
- Chen, Y.; Strothers, M.; Benigni, A. All-day coordinated optimal scheduling in distribution grids with PV penetration. Electr. Power Syst. Res. 2018, 164, 112–122. [Google Scholar] [CrossRef]
- Ge, X.; Shen, L.; Zheng, C.; Li, P.; Dou, X. A Decoupling Rolling Multi-Period Power and Voltage Optimization Strategy in Active Distribution Networks. Energies 2020, 13, 5789. [Google Scholar] [CrossRef]
- Alboaouh, K.; Mohagheghi, S. Voltage and power optimization in a distribution network with high PV penetration. In Proceedings of the 2018 IEEE/PES Transmission and Distribution Conference and Exposition (T&D), Denver, CO, USA, 16–19 April 2018; IEEE: New York, NY, USA, 2018; pp. 1–9. [Google Scholar]
- De Din, E.; Pau, M.; Ponci, F.; Monti, A. A Coordinated Voltage Control for Overvoltage Mitigation in LV Distribution Grids. Energies 2020, 13, 2007. [Google Scholar] [CrossRef] [Green Version]
- Ferreira, W.M.; Meneghini, I.R.; Brandao, D.I.; Guimarães, F.G. Preference cone based multi-objective evolutionary algorithm to optimal management of distribuited energy resources in microgrids. Appl. Energy 2020, 274, 115326. [Google Scholar] [CrossRef]
- Jain, N.; Singh, S.; Srivastava, S. Particle Swarm Optimization Based Method for Optimal Siting and Sizing of Multiple Distributed Generators. In Proceedings of the 16th National Power Systems Conference, Hyderabad, India, 15–17 December 2010; pp. 669–674. [Google Scholar]
- Resources. Available online: https://site.ieee.org/pes-testfeeders/resources/ (accessed on 1 August 2021).
- Boglou, V.; Karavas, C.S.; Arvanitis, K.; Karlis, A. A fuzzy energy management strategy for the coordination of electric vehicle charging in low voltage distribution grids. Energies 2020, 13, 3709. [Google Scholar] [CrossRef]
- Fu, C.; Wang, C.; Wang, L.; Zhao, B. Control of PV systems for distribution network voltage regulation with communication delays. Electr. Power Syst. Res. 2020, 179, 106071. [Google Scholar] [CrossRef]
- Welikala, S.; Dinesh, C.; Ekanayake, M.P.B.; Godaliyadda, R.I.; Ekanayake, J. A real-time non-intrusive load monitoring system. In Proceedings of the 2016 11th International Conference on Industrial and Information Systems (ICIIS), Roorkee, India, 3–4 December 2016; pp. 850–855. [Google Scholar]
- Welikala, S.; Thelasingha, N.; Akram, M.; Ekanayake, P.B.; Godaliyadda, R.I.; Ekanayake, J.B. Implementation of a robust real-time non-intrusive load monitoring solution. Appl. Energy 2019, 238, 1519–1529. [Google Scholar] [CrossRef]
- Welikala, S.; Dinesh, C.; Ekanayake, M.P.B.; Godaliyadda, R.I.; Ekanayake, J. Incorporating Appliance Usage Patterns for Non-Intrusive Load Monitoring and Load Forecasting. IEEE Trans. Smart Grid 2019, 10, 448–461. [Google Scholar] [CrossRef]
- Dinesh, C.; Welikala, S.; Liyanage, Y.; Ekanayake, M.P.B.; Godaliyadda, R.I.; Ekanayake, J. Non-intrusive load monitoring under residential solar power influx. Appl. Energy 2017, 205, 1068–1080. [Google Scholar] [CrossRef]
- Fang, Z.; Lin, Y.; Song, S.; Song, C.; Lin, X.; Cheng, G. Active distribution system state estimation incorporating photovoltaic generation system model. Electr. Power Syst. Res. 2020, 182, 106247. [Google Scholar] [CrossRef]
- Wang, C.; Wu, J.; Ekanayake, J.; Jenkins, N. Smart Electricity Distribution Networks; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| How the Sensitivity Matrix Was Developed | References | Disadvantages of the Method |
|---|---|---|
| Inverse from the Jacobian of Newton–Raphson power flow equations | [27,58] | Repetitive computation of the inverse of the Jacobian, which is computationally expensive with the increase in matrix size. |
| Surface fitting technique and using simulations of multiple load flow analysis | [59,60] | An extensive simulation needs to be run in case of a change in the network parameters to be able to develop a new sensitivity matrix that will fit the network. |
| Using the topological structure of the network | [61] | The derivation is performed for an MV distribution line assuming constant voltage for the slack bus. However, the secondary voltage of the LV network will fluctuate, which needs to be accounted for. |
| Time of Day | PV Source | Base Load | Number of Simulation Runs | Control Instances | ||
|---|---|---|---|---|---|---|
| RPC Q-abs | APC | RPC Q-inj | ||||
| 10:00 | 76% | 30% | 1000 | 403 | 7 | 0 |
| 11:00 | 93% | 50% | 2000 | 325 | 102 | 0 |
| 21:00 | 0% | 100% | 500 | 0 | 0 | 500 |
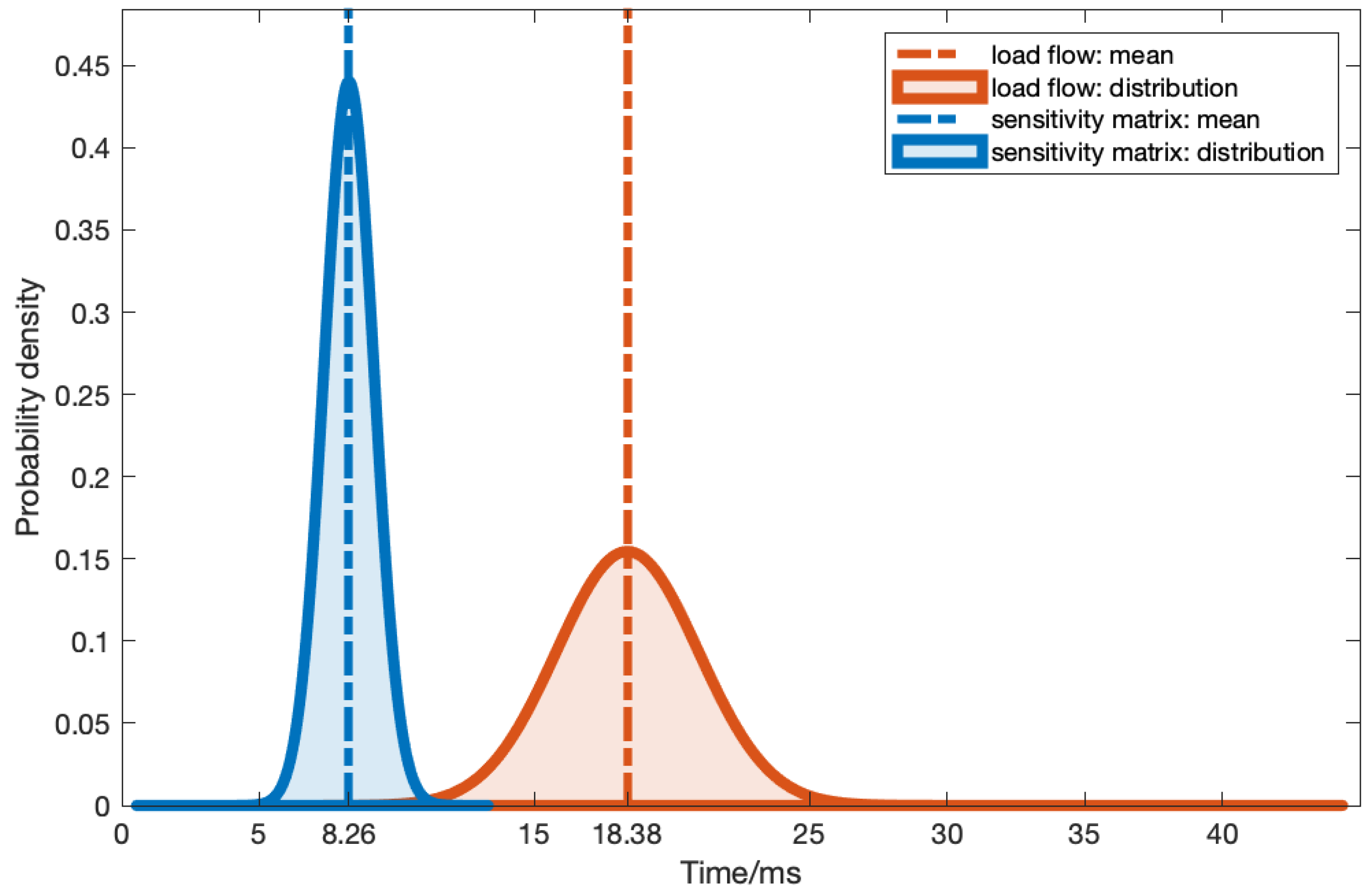
| Calculation Method | Computational Time/s | |||
|---|---|---|---|---|
| Mean | Std. Deviation | Minimum | Maximum | |
| Load Flow | 18.38 | 2.58 | 14.75 | 44.38 |
| Sensitivity Matrix | 8.26 | 0.90 | 5.35 | 12.10 |
| Population | Scatter Variance | ||||
|---|---|---|---|---|---|
| 0.1 | 0.2 | 0.5 | 1.0 | 2.0 | |
| 5 | 41 | 41 | 45 | 45 | 46 |
| 10 | 38 | 38 | 38 | 40 | 41 |
| 20 | 33 | 30 | 30 | 33 | 33 |
| 30 | 30 | 30 | 29 | 29 | 30 |
| 50 | 28 | 27 | 27 | 28 | 28 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hassan, A.S.J.; Marikkar, U.; Prabhath, G.W.K.; Balachandran, A.; Bandara, W.G.C.; Ekanayake, P.B.; Godaliyadda, R.I.; Ekanayake, J.B. A Sensitivity Matrix Approach Using Two-Stage Optimization for Voltage Regulation of LV Networks with High PV Penetration. Energies 2021, 14, 6596. https://doi.org/10.3390/en14206596
Hassan ASJ, Marikkar U, Prabhath GWK, Balachandran A, Bandara WGC, Ekanayake PB, Godaliyadda RI, Ekanayake JB. A Sensitivity Matrix Approach Using Two-Stage Optimization for Voltage Regulation of LV Networks with High PV Penetration. Energies. 2021; 14(20):6596. https://doi.org/10.3390/en14206596
Chicago/Turabian StyleHassan, A.S. Jameel, Umar Marikkar, G.W. Kasun Prabhath, Aranee Balachandran, W.G. Chaminda Bandara, Parakrama B. Ekanayake, Roshan I. Godaliyadda, and Janaka B. Ekanayake. 2021. "A Sensitivity Matrix Approach Using Two-Stage Optimization for Voltage Regulation of LV Networks with High PV Penetration" Energies 14, no. 20: 6596. https://doi.org/10.3390/en14206596
APA StyleHassan, A. S. J., Marikkar, U., Prabhath, G. W. K., Balachandran, A., Bandara, W. G. C., Ekanayake, P. B., Godaliyadda, R. I., & Ekanayake, J. B. (2021). A Sensitivity Matrix Approach Using Two-Stage Optimization for Voltage Regulation of LV Networks with High PV Penetration. Energies, 14(20), 6596. https://doi.org/10.3390/en14206596