
Modeling, Controller Design and Simulation Groundwork on Multirotor Unmanned Aerial Vehicle Hybrid Power Unit


Abstract
:1. Introduction
2. Hybrid Propulsion System Modeling
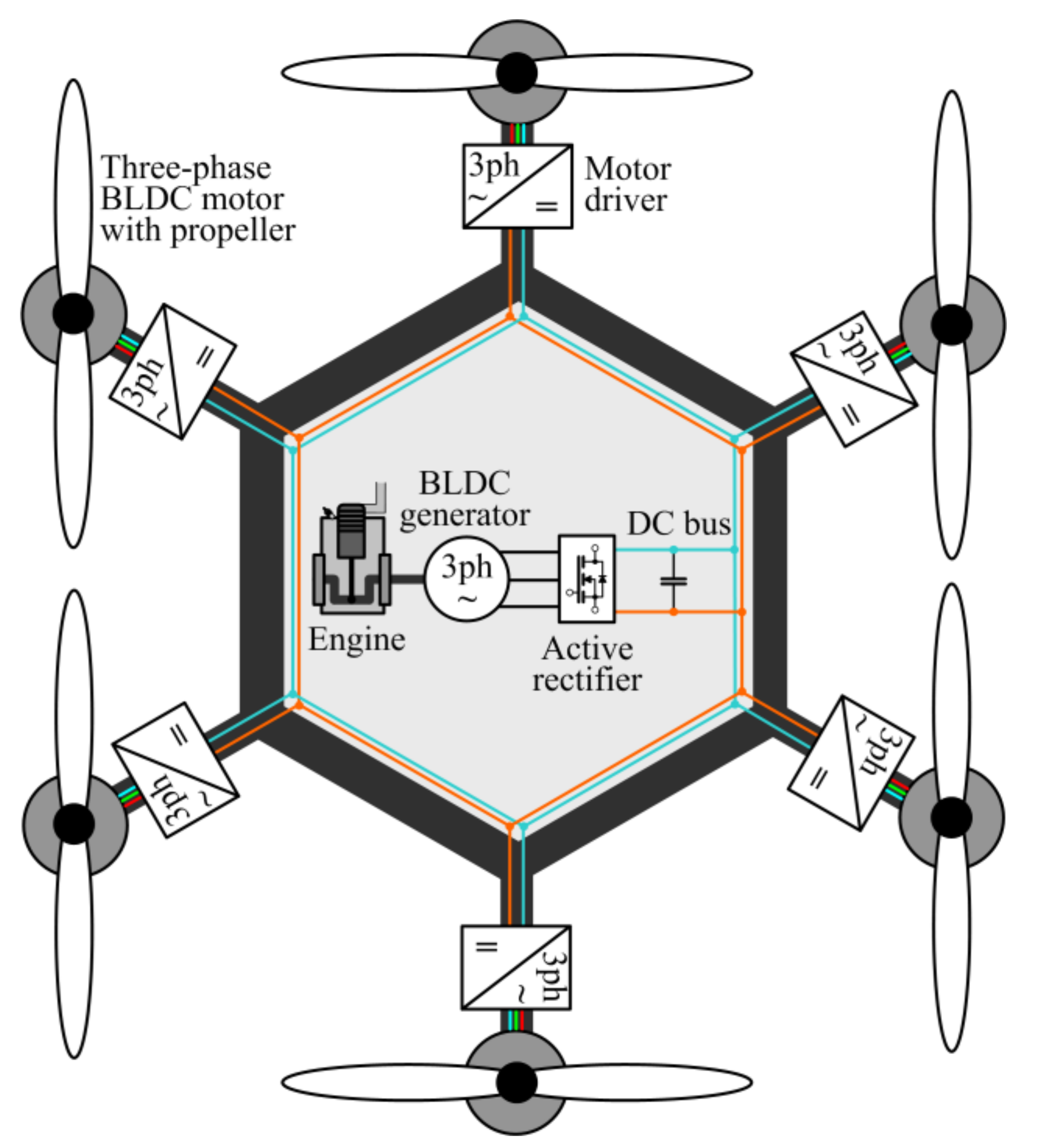
2.1. Hybrid Propulsion System Overview
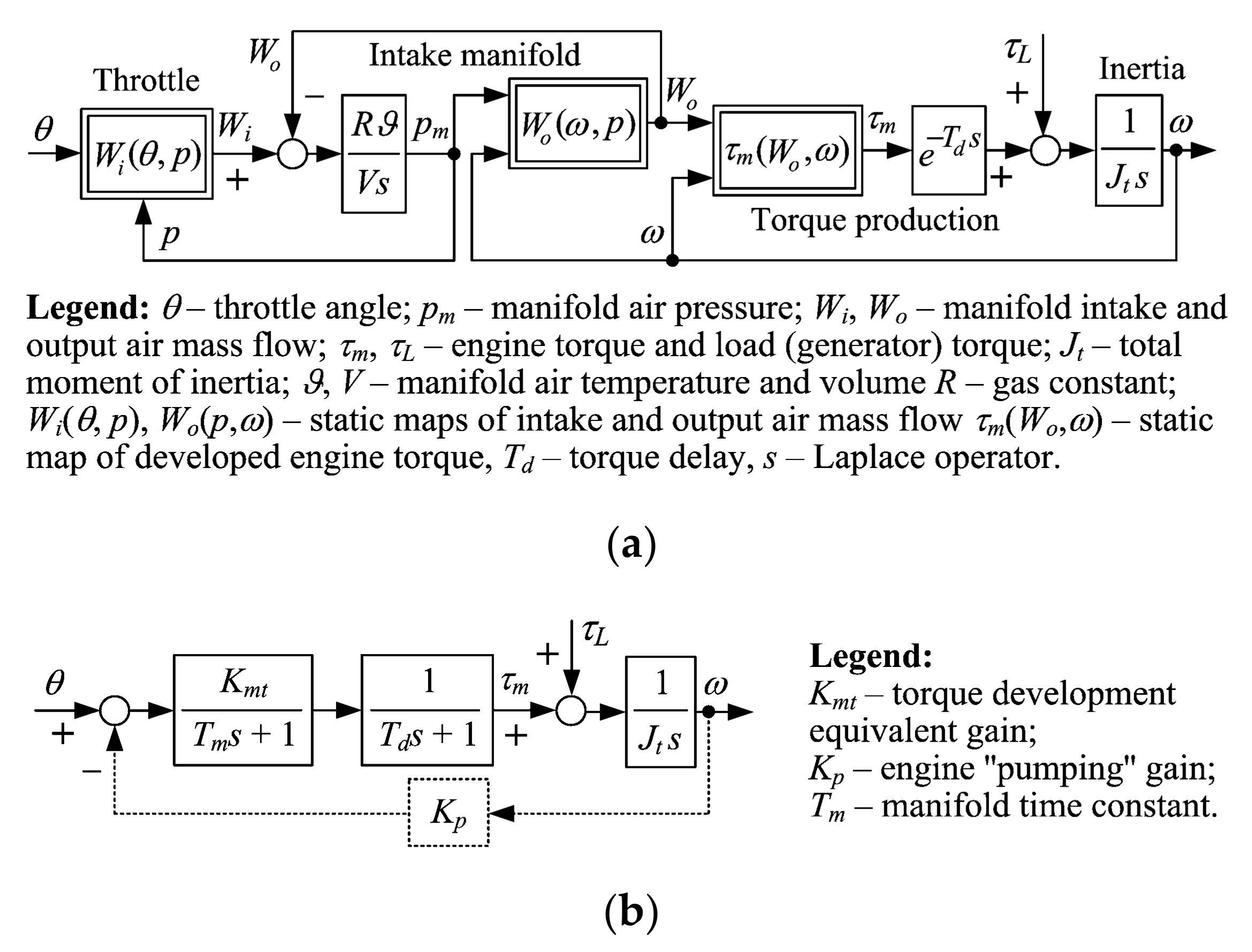
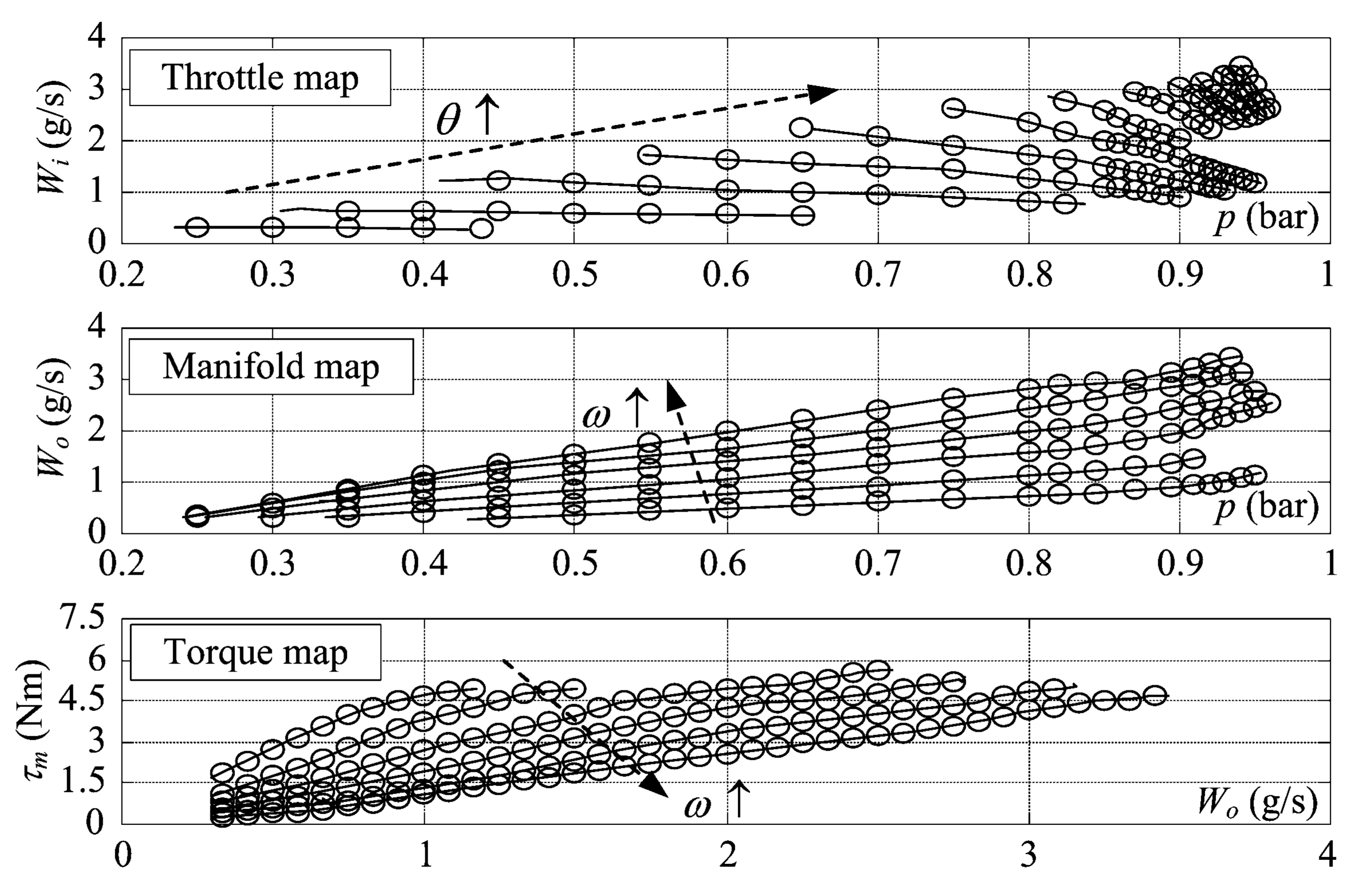
2.2. Engine Model
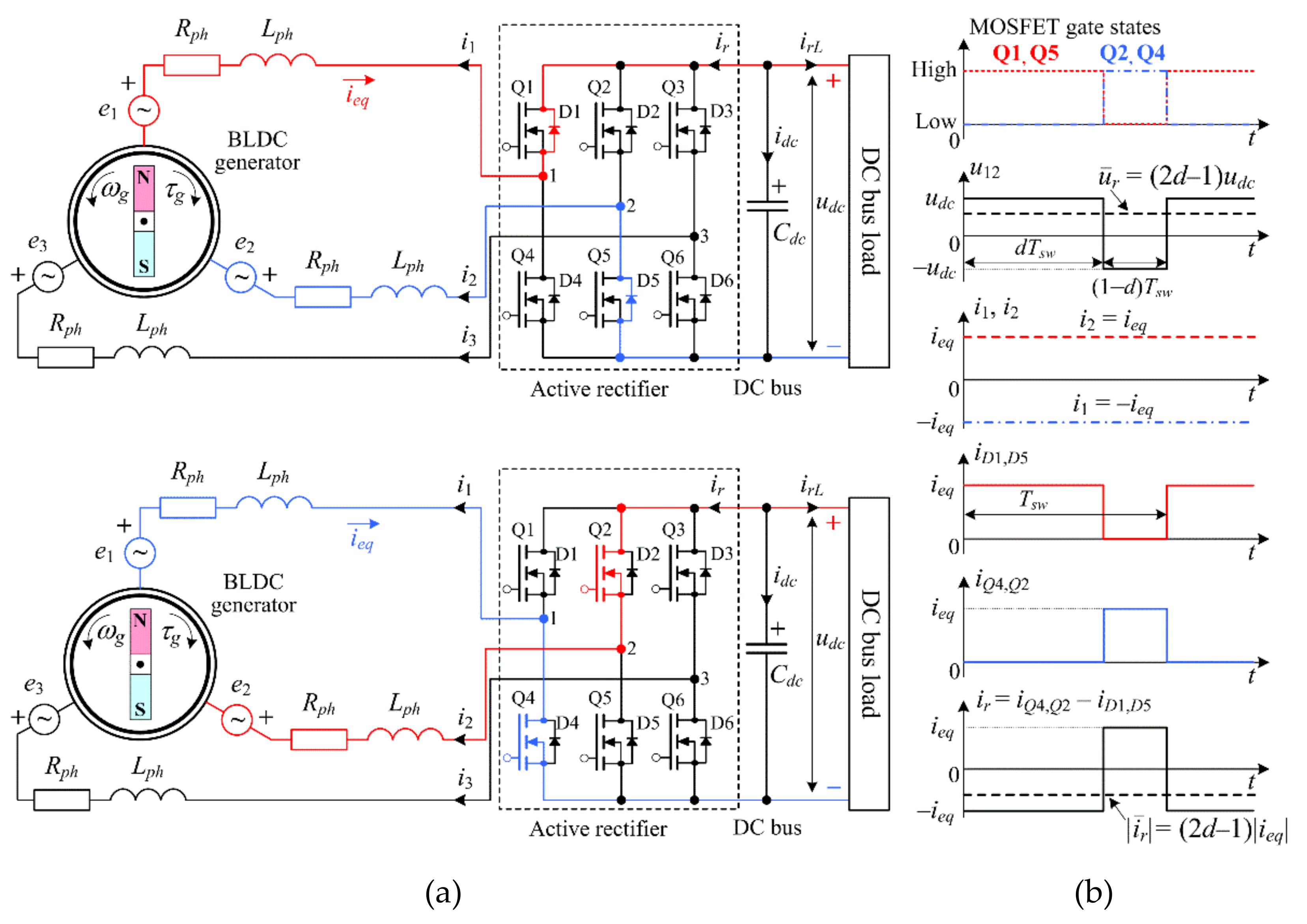
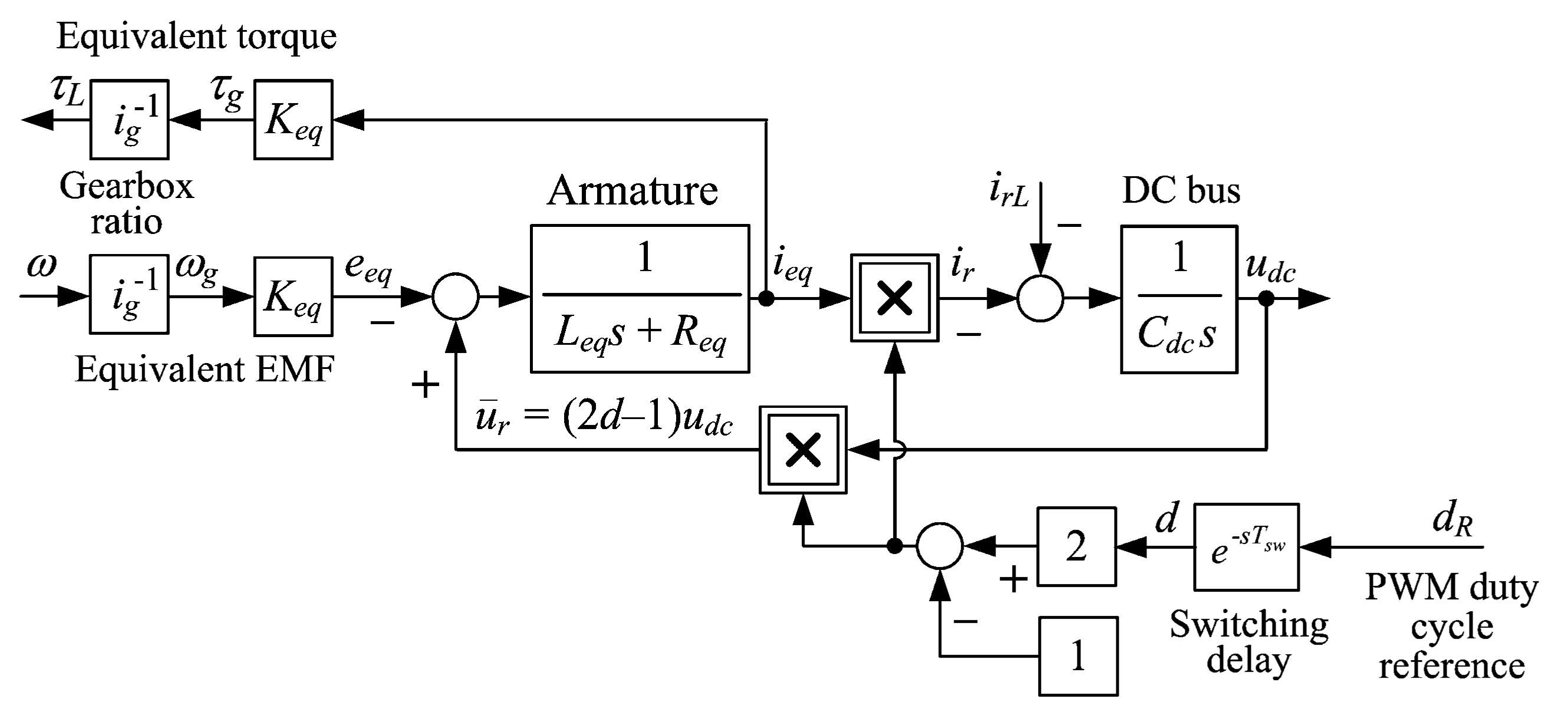
2.3. Brushless DC Generator with Active Rectifier-Supplied DC Bus
3. Control System Design
3.1. Damping Optimum Criterion
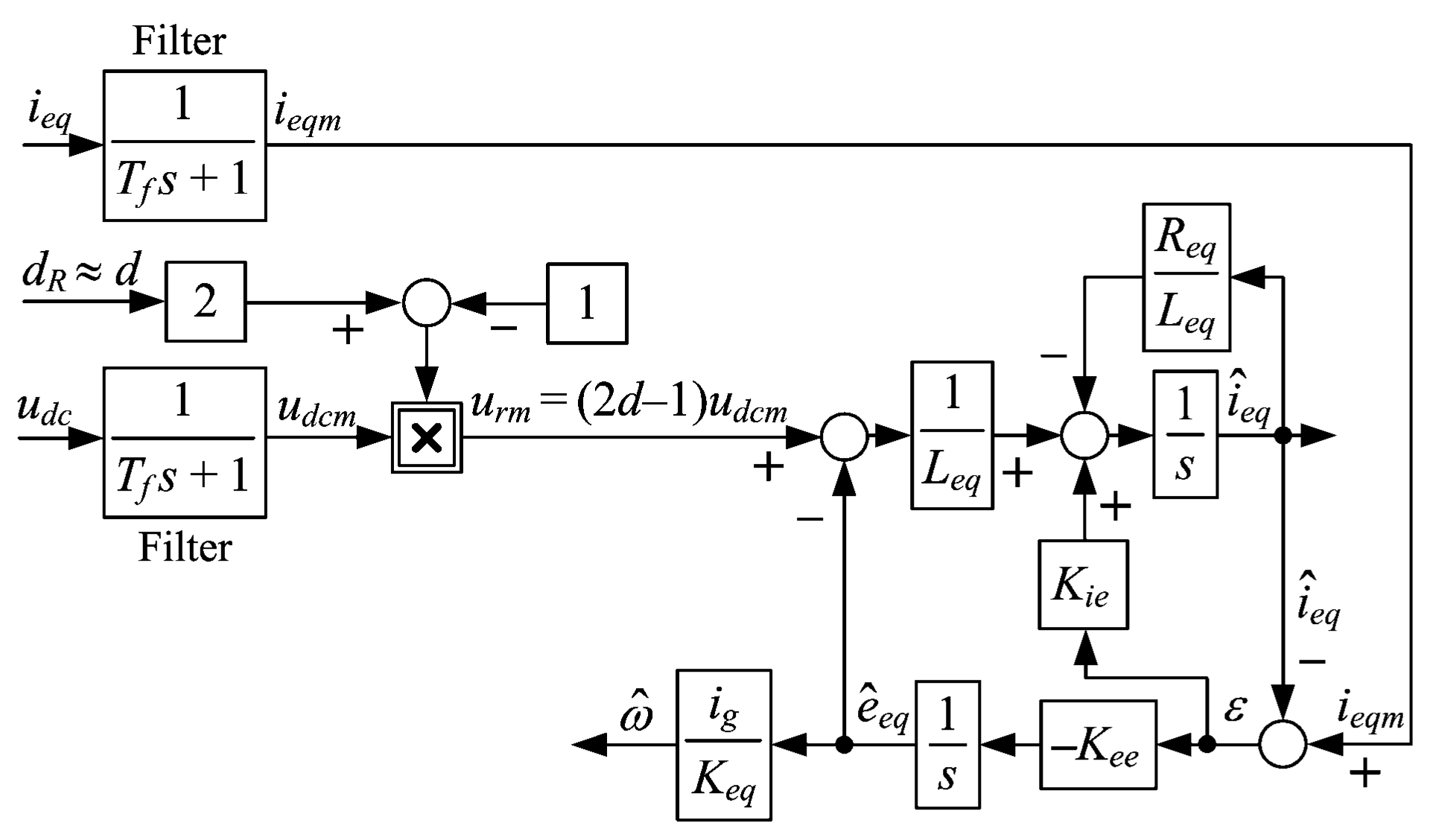
3.2. Engine-Generator Set Rotational Speed Estimator
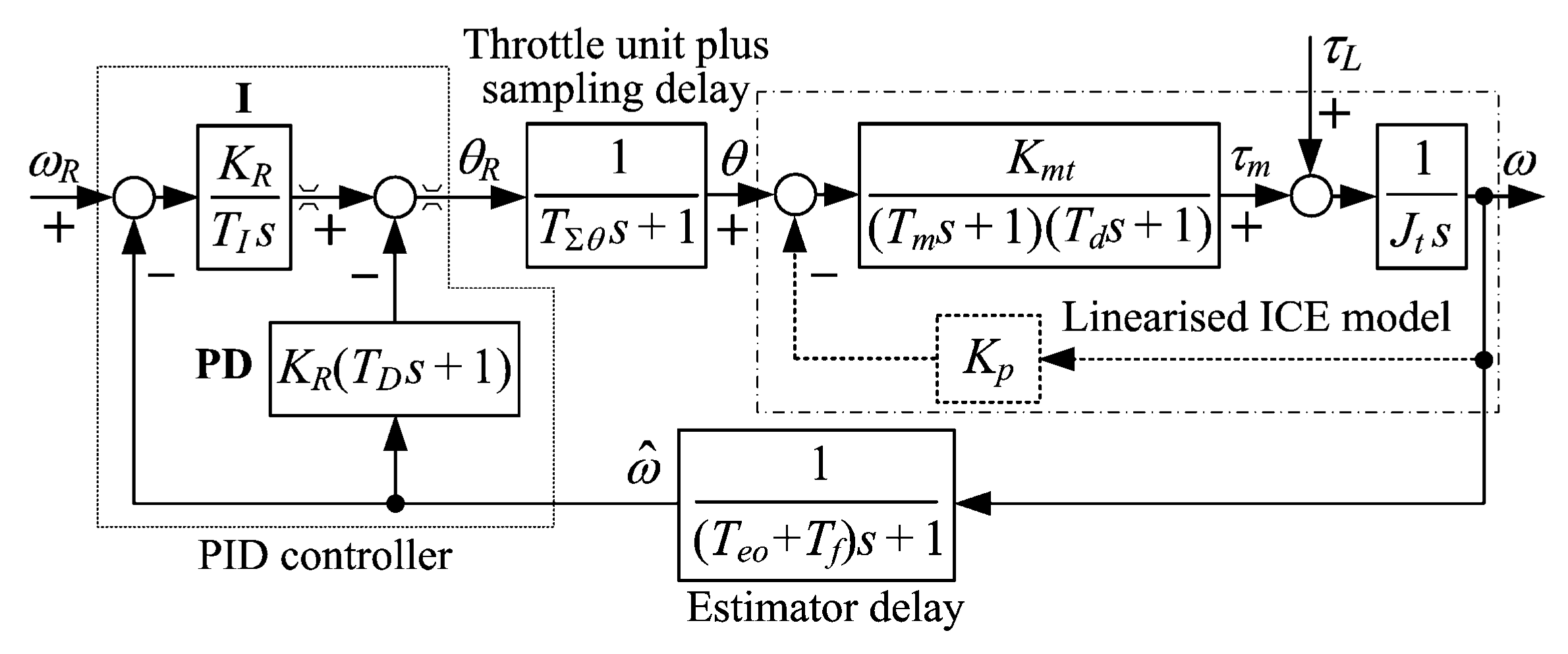
3.3. Engine Speed Control System
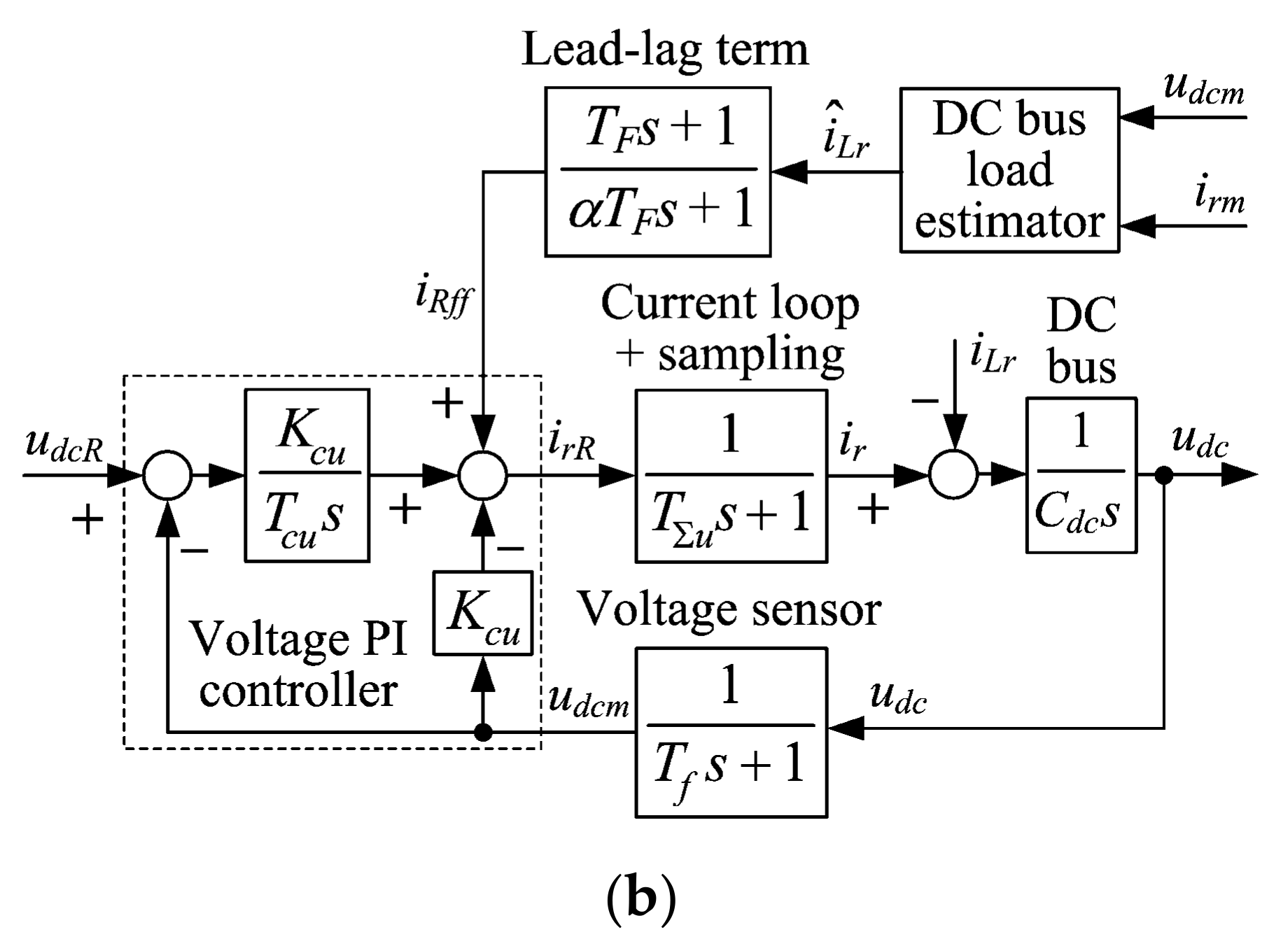
3.4. DC Bus Voltage and Current Control Systems
4. Control System Robustness Analysis
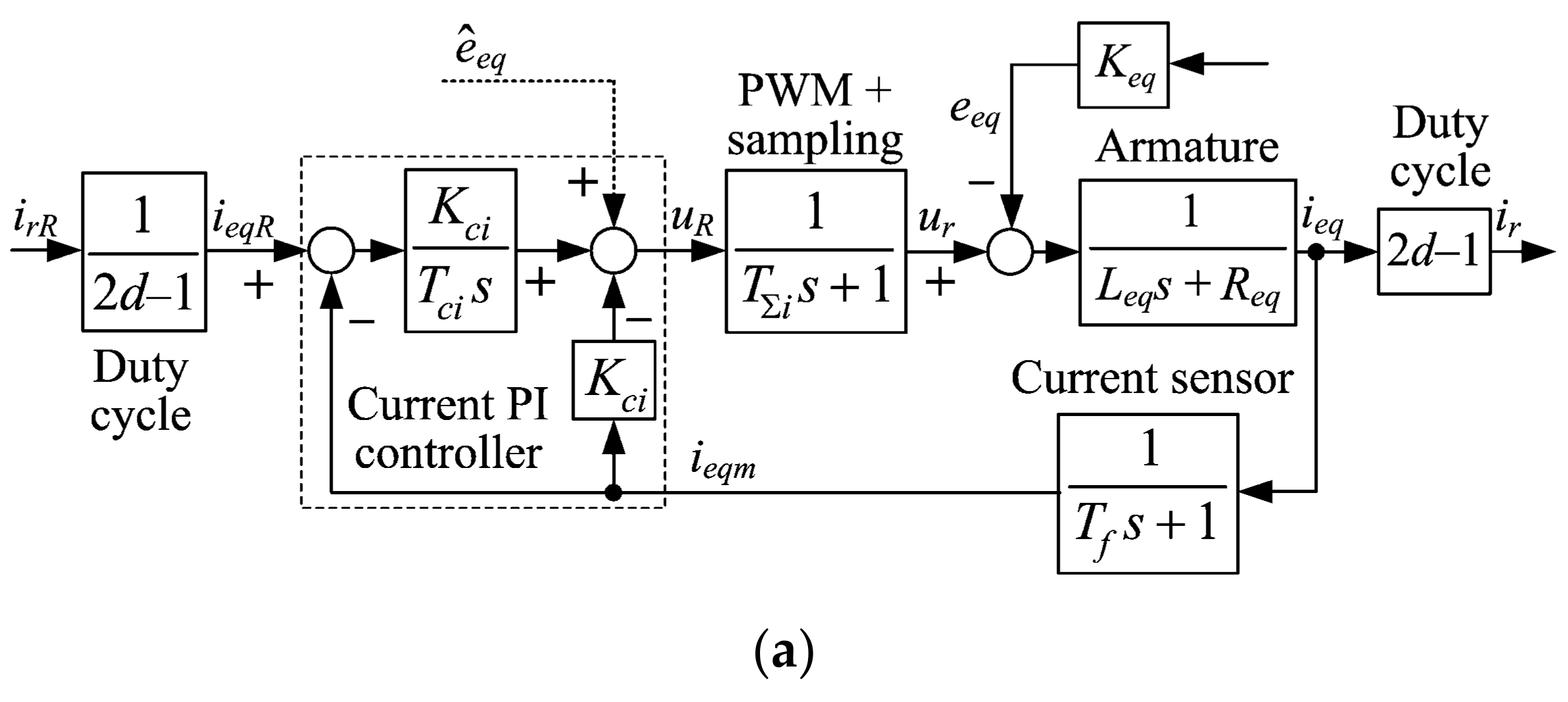
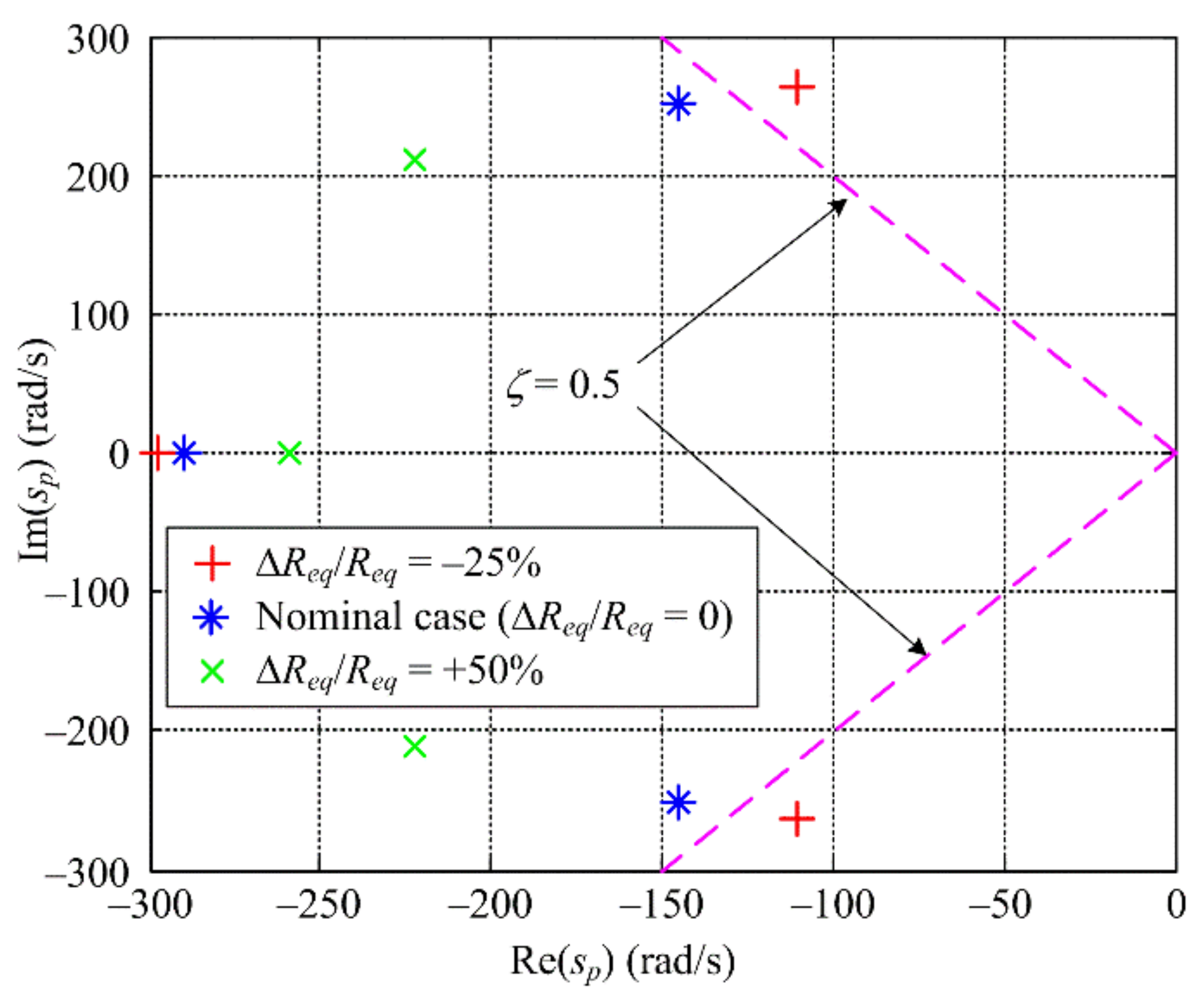
4.1. Generator Current Control System Robustness to Armature Resistance Variations
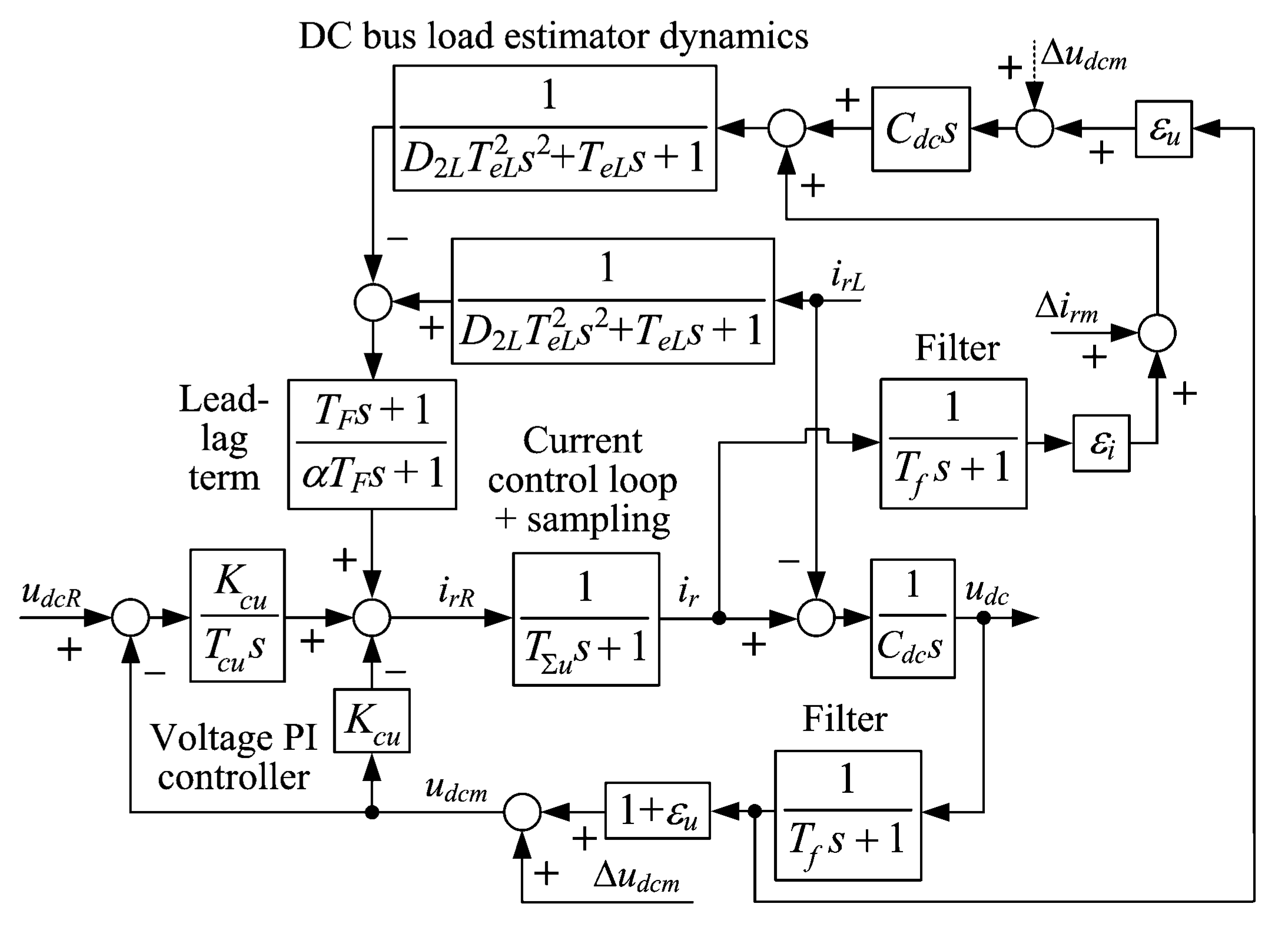
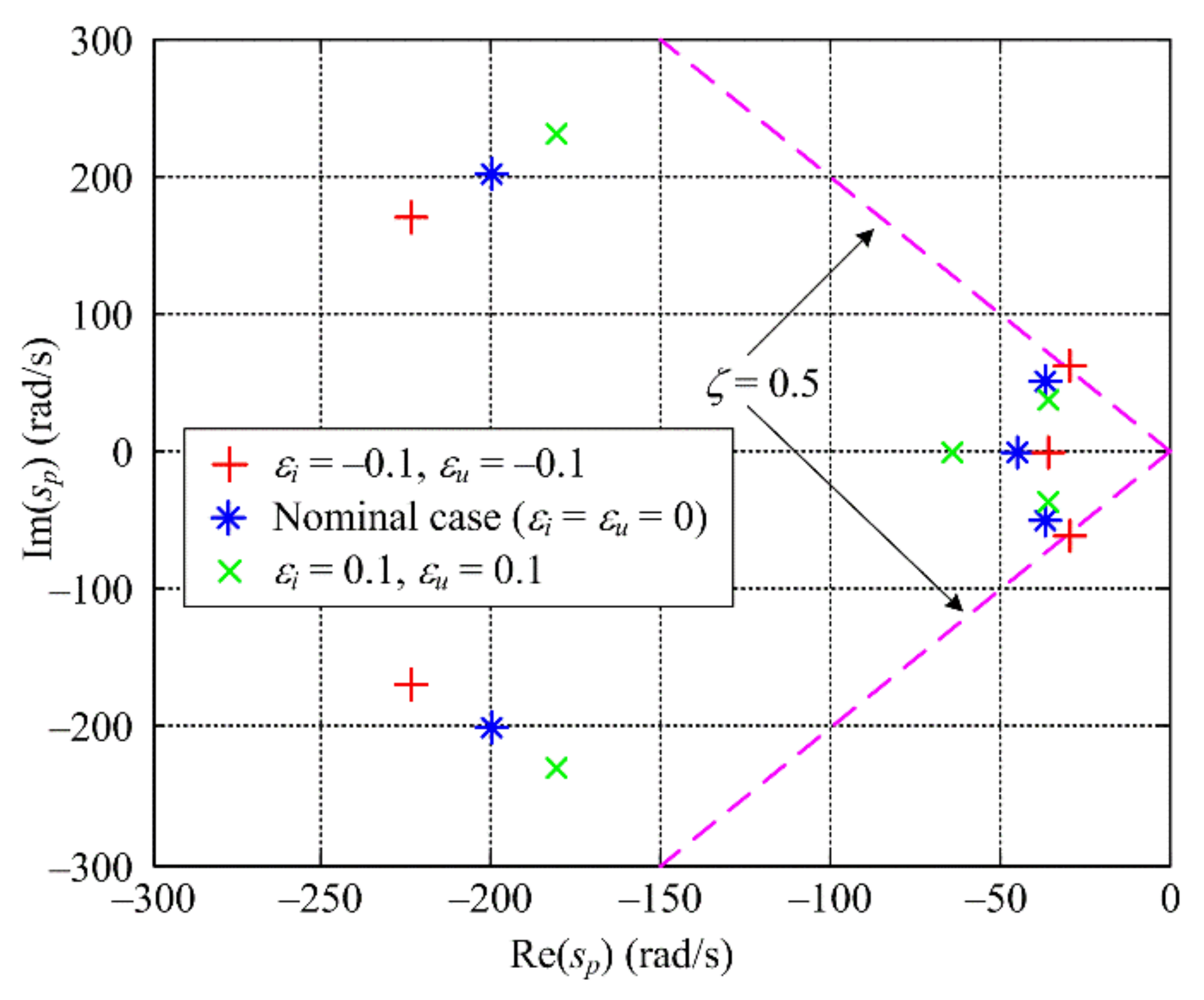
4.2. DC Bus Voltage Control System Robustness to Sensor Errors
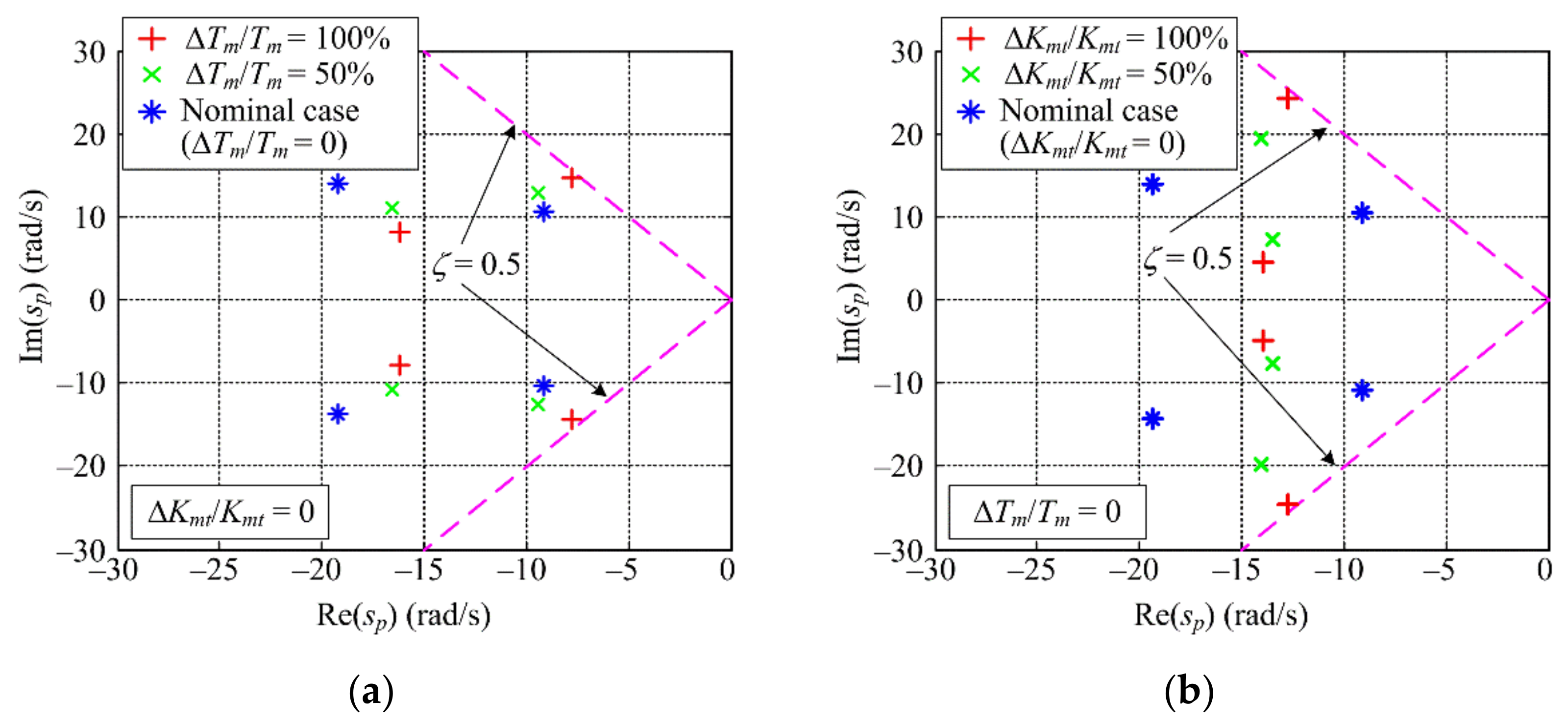
4.3. Engine Speed Control System Robustness to Torque Gain and Manifold Lag Errors
4.4. Luenberger Estimator-Based Speed Estimation Accuracy
5. Simulation results
5.1. Simulation Model Parameterization
5.2. Results of Simulation Analyses
6. Discussion of Results
- (i)
- Brushless DC machine armature current control system should be fairly robust to armature resistance variations over the expected range of its variations;
- (ii)
- DC bus control system sensitivity to voltage and current sensor gain and offset error may manifest in closed-loop voltage control error, with possibly decreased level of damping of the dominant closed-loop poles in the case of negative sensor gain errors;
- (iii)
- The engine-generator set speed control system should be robust to a relatively large change of manifold lag and equivalent engine torque gain parameter.
- (iv)
- The generator current and voltage sensor errors may affect both the steady-state and transient accuracy of the engine-generator speed estimation. The steady-state estimation error is solely affected by the current/voltage sensor offset errors and generator armature resistance mismatch with respect to its nominal value.
- (i)
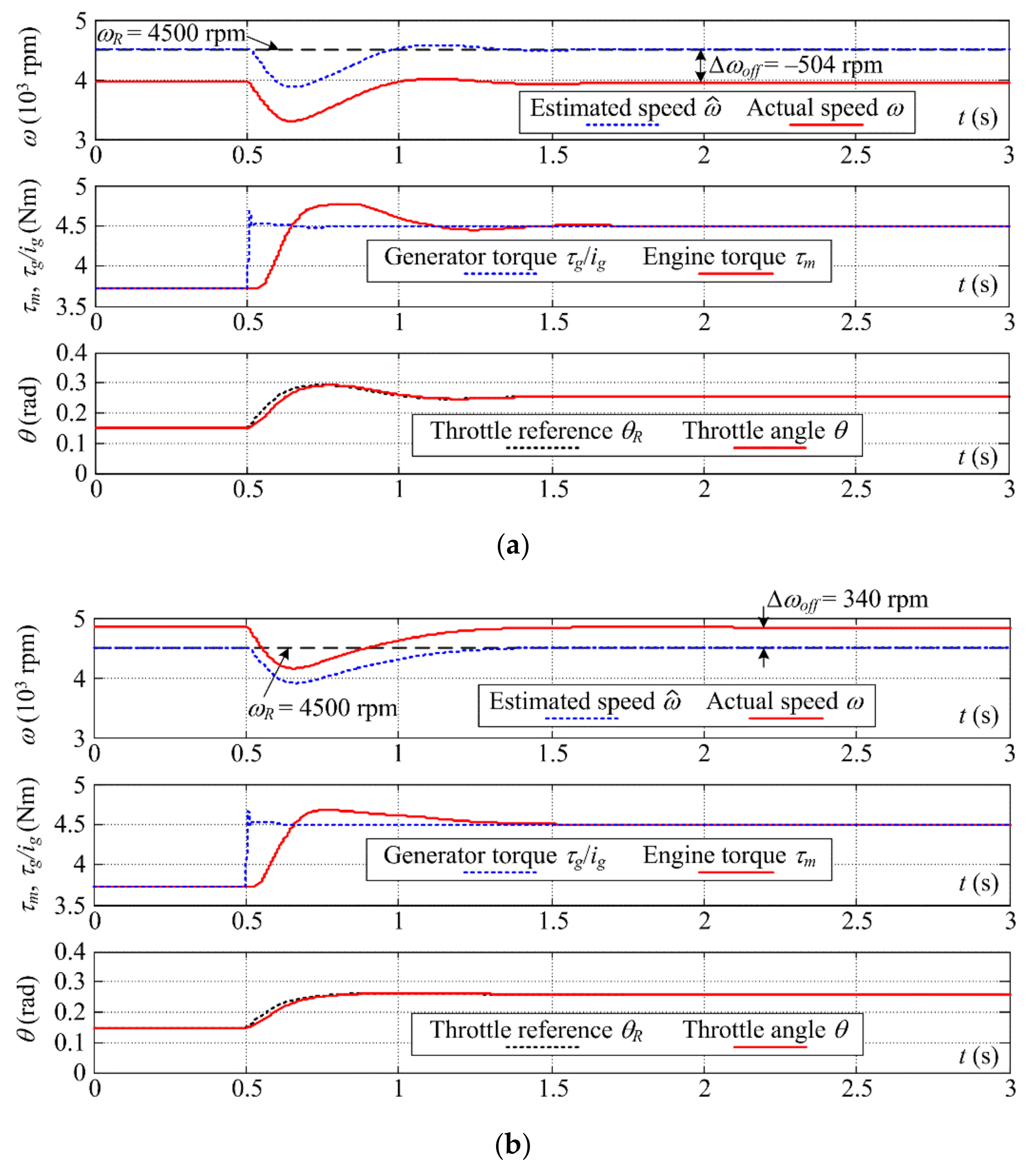
- The engine speed control system with PID controller is capable of suppressing the load disturbance within 1 s, with only a moderate engine speed drop of 15.6% from the target value of 4500 rpm;
- (ii)
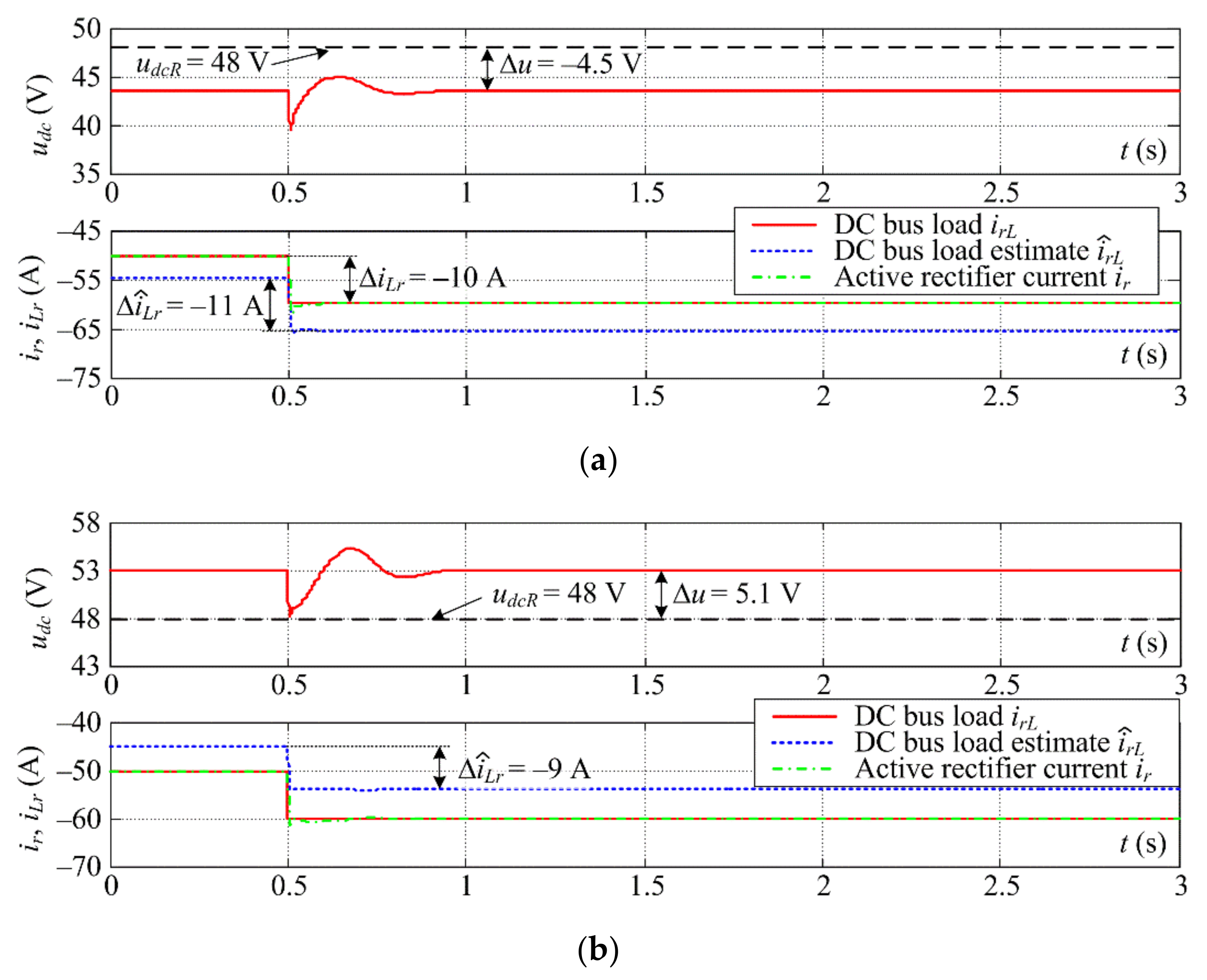
- The DC bus voltage/current control system has been characterized by 80 ms recovery time and 200 ms settling time after the sudden DC bus load change, and is also characterized by a non-emphasized drop in the DC bus voltage (10.4% of the target value of 48 V);
- (iii)
- The engine-generator set speed control system based on Luenberger estimator of brushless DC machine electromotive force estimation may be affected by the armature resistance variations and the brushless DC generator armature current/voltage sensor gain and offset errors, which may result in perceptible closed-loop steady-state speed control error, but the favorable closed-loop damping of the control system is still largely preserved;
- (iv)
- The anticipated ranges of voltage and current sensor errors also do not significantly affect the DC bus voltage closed-loop system robustness, i.e., favorable closed-loop damping is also preserved. In both cases (i.e., speed control and DC bus voltage control), the control error magnitude is primarily related to magnitudes of the sensor offset errors.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Abbreviations: | |
| AC | Alternating current |
| BLDC | Brushless direct current (machine/generator) |
| BPTT | Back propagation through time (gradient optimization) |
| DC | Direct current |
| DP | Dynamic programming |
| ECMS | Equivalent consumption minimization strategy |
| EMF | Electromotive force |
| ICE | Internal combustion engine |
| PI | Proportional-integral (controller) |
| PID | Proportional-integral-derivative (controller) |
| PWM | Pulse-width modulation |
| rpm | Revolutions per minute |
| UAV | Unmanned aerial vehicle |
| D1 … D6 | Flywheeling diodes |
| Q1 … Q6 | MOSFET switches |
| Variables: | |
| eeq | BLDC machine DC model equivalent electromotive force |
| el | BLDC machine electromotive force per phase |
| dR, d | Active rectifier duty cycle reference and actual duty cycle value |
| i1, i2, i3 | Instantaneous values of BLDC machine phase currents |
| ieq, ieqm | BLDC machine DC model equivalent current and its measurement |
| ir, irL | Active rectifier output current and DC bus load current |
| Iph | BLDC machine phase current magnitude |
| pm | ICE manifold pressure |
| s | Laplace operator |
| udc, udcm | DC bus voltage and its measurement value |
| ur | Active rectifier output voltage (line voltage of two BLDC phases) |
| Wi, Wo | ICE manifold intake and output air mass flow |
| αg | Generator rotor position |
| θ, θR | Throttle servodrive position and position reference (target) |
| τm, τL, τg | Engine torque, engine load torque and BLDC generator torque |
| τmax | Engine maximum torque |
| ω, ωg | Engine speed and BLDC generator speed |
| Parameters: | |
| aω1 … aω5 | ICE speed closed-loop characteristic polynomial coefficients |
| Cdc | DC bus capacitance |
| D2, …, Dn | Damping optimum characteristic ratios |
| D2o, D2L | Damping optimum characteristic ratios in estimator design |
| D2i, D3i | Damping optimum characteristic ratios (current PI controller) |
| D2u, D3u | Damping optimum characteristic ratios (voltage PI controller) |
| D2ω, D3ω, D4ω | Damping optimum characteristic ratios (ICE speed PID controller) |
| ig | Gearbox transmission ratio |
| Jt | Total moment of inertia at engine side |
| Kci, Tci | Current PI controller proportional gain and integral time constant |
| Kcu, Tcu | Voltage PI controller proportional gain and integral time constant |
| Kdce, KLe | Correction gains of Luenberger estimator (DC bus load estimation) |
| Ke | BLDC machine per phase electromotive force constant |
| Kee, Kie | Correction gains of Luenberger estimator (engine speed estimation) |
| Keq | BLDC machine DC model electromotive force and torque constant |
| Kmt, Kp | Engine torque equivalent gain and engine “pumping” gain |
| KR | ICE speed PID controller proportional gain |
| TI, TD | ICE speed PID controller integral and derivative time constants |
| l | Generator phase sequence number (1, 2, or 3) |
| m | Number of generator phases |
| n | Closed-loop system order |
| p | BLDC machine number of pole pairs |
| R | Gas constant |
| Rph, Lph | BLDC machine phase resistance and inductance |
| rd | Semiconductor “switch” dynamic resistance |
| Req, Leq | Equivalent resistance and inductance of BLDC machine DC model |
| T | Sampling time (discrete-time controller) |
| Tm | ICE manifold time constant |
| Td | ICE torque development delay (dead-time) |
| Te | Equivalent closed-loop time constant (damping optimum criterion) |
| Tei, Teu | Equivalent time constants (current and voltage control systems) |
| TeL, Teo | Equivalent time constants in Luenberger estimator designs |
| Teω | Equivalent time constants (ICE speed control system) |
| Tf | Current and voltage sensor filtering time constant |
| TF | Feed-forward compensator “lead” time constant |
| Tpi, Tpu | Parasitic time constants in current and voltage PI controller |
| Tsw, fsw | PWM voltage switching delay and switching frequency |
| Tθ, TΣθ | Throttle servodrive lag and equivalent lag in PID controller design |
| TΣi | Lag of PWM switching and sampling in current PI controller design |
| TΣu | Current control loop and sampling lag (voltage PI controller design) |
| V, ϑ | ICE intake manifold volume and temperature |
| α | Feed-forward compensator filtering pole scaling factor |
| φm | BLDC machine rotor field flux in the gerenal case |
| φmn | Constant value of rectangular field flux spatial distribution |
| π | Ludolph’s number (3.1415926) |
| ζ | Damping ratio |
| Symbols: | |
| ∧ | Estimated variable |
| _ | Average value |
References
- Maza, I.; Caballero, F.; Capitán, J.; Martínez-De-Dios, J.R.; Ollero, A. Experimental results in multi-UAV coordination for disaster management and civil security applications. J. Intell. Robot. Syst. 2011, 61, 563–585. [Google Scholar] [CrossRef]
- Kingston, D.; Beard, R.W.; Holt, R.S. Decentralized perimeter surveillance using a team of UAVs. IEEE Trans. Robot. 2008, 24, 1394–1404. [Google Scholar] [CrossRef] [Green Version]
- Adams, S.M.; Levitan, M.L.; Friedland, C.J. High resolution imagery collection for post-disaster studies utilizing unmanned aircraft systems (UAS). Photogramm. Eng. Remote Sens. 2014, 80, 1161–1168. [Google Scholar] [CrossRef] [Green Version]
- Ayele, Y.Z.; Aliyari, M.; Griths, D.; Droguett, E.L. Automatic crack segmentation for UAV-assisted bridge inspection. Energies 2020, 13, 6250. [Google Scholar] [CrossRef]
- Deng, C.; Wang, S.; Huang, Z.; Tan, Z.; Liu, J. Unmanned aerial vehicles for power line inspection: A cooperative way in platforms and communications. J. Commun. 2014, 9, 687–692. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Hoffmann, W.C.; Lan, Y.; Wu, W.; Fritz, B.K. Development of a spray system for an unmanned aerial vehicle platform. Appl. Eng. Agric. 2014, 25, 803–809. [Google Scholar] [CrossRef]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. A critical review on unmanned aerial vehicles power supply and energy management: Solutions, strategies, and prospects. Appl. Energy 2019, 255, 113823. [Google Scholar] [CrossRef]
- Pang, T.; Peng, K.; Lin, F.; Chen, B.M. Towards long-endurance flight: Design and implementation of a variable-pitch gasoline-engine quadrotor. In Proceedings of the IEEE International Conference on Control and Automation (ICCA 2016), Kuching, Malaysia, 23–27 May 2016; pp. 767–772. [Google Scholar]
- Sheng, S.; Sun, D. Control and optimization of a variable-pitch quadrotor with minimum power consumption. Energies 2016, 9, 232. [Google Scholar] [CrossRef]
- Hung, J.Y.; Gonzalez, L.F. On parallel hybrid-electric propulsion system for unmanned aerial vehicles. Prog. Aerosp. Sci. 2012, 51, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Lu, W.; Zhang, D.; Zhang, J.; Li, T.; Hu, T. Design and implementation of a gasoline-electric hybrid propulsion system for a micro triple tilt-rotor VTOL UAV. In Proceedings of the 6th Data Driven Control and Learning Systems Conference, Chongqing, China, 16 October 2017; pp. 433–438. [Google Scholar]
- Fredericks, W.J.; Moore, M.D.; Busan, R.C. Benefits of hybrid-electric propulsion to achieve 4x cruise efficiency for a VTOL UAV. In Proceedings of the 2013 International Powered Lift Conference, Los Angeles, CA, USA, 12–14 August 2013; p. 21. [Google Scholar]
- Cipek, M.; Pavković, D.; Petrić, J. A control-oriented simulation model of a power-split hybrid electric vehicle. Appl. Energy 2013, 101, 121–133. [Google Scholar]
- Abdul Sathar Eqbal, M.; Fernando, N.; Marino, M.; Wild, G. Hybrid propulsion systems for remotely piloted aircraft systems. Aerospace 2018, 5, 34. [Google Scholar] [CrossRef] [Green Version]
- Friedrich, C.; Robertson, P.A. Hybrid-electric propulsion for aircraft. J. Aircr. 2015, 52, 176–189. [Google Scholar] [CrossRef]
- Finger, D.F.; Braun, C.; Bil, C. A Review of Configuration Design for Distributed Propulsion Transitioning VTOL Aircraft. In Proceedings of the 2017 Asia-Pacific International Symposium on Aerospace Technology (APISAT 2017), Seoul, Korea, 16–18 October 2017; p. 15. [Google Scholar]
- Recoskie, S.; Fahim, A.; Gueaieb, W.; Lanteigne, E. Hybrid power plant design for a long-range dirigible UAV. IEEE Trans. Mechatron. 2013, 19, 606–614. [Google Scholar] [CrossRef]
- Recoskie, S.; Fahim, A.; Gueaieb, W.; Lanteigne, E. Experimental testing of a hybrid power plant for a dirigible UAV. J. Intell. Robot. Syst. 2013, 69, 69–81. [Google Scholar] [CrossRef]
- Depcik, C.; Cassady, T.; Collicott, B.; Burugupally, S.P.; Li, X.; Alam, S.S.; Hobeck, J. Comparison of lithium ion batteries, hydrogen fueled combustion engines, and a hydrogen fuel cell in powering a small Unmanned Aerial Vehicle. Energy Convers. Manag. 2020, 207, 112514. [Google Scholar] [CrossRef]
- Benić, Z.; Krznar, M.; Kotarski, D. Mathematical modelling of unmanned aerial vehicles with four rotors. Interdiscip. Descr. Complex Syst. 2016, 14, 88–100. [Google Scholar] [CrossRef]
- Wang, X.; Liu, J.; Zhang, Y.; Shi, B.; Jiang, D.; Peng, H. A unified symplectic pseudospectral method for motion planning and tracking control of 3D underactuated overhead cranes. Int. J. Robust Nonlinear Control 2019, 29, 1–18. [Google Scholar] [CrossRef]
- Peng, H.; Li, F.; Liu, J.; Ju, Y. A symplectic instantaneous optimal control for robot trajectory tracking with differential-algebraic equation models. IEEE Trans. Ind. Electron. 2020, 67, 3819–3829. [Google Scholar] [CrossRef] [Green Version]
- Li, F.; Peng, H.; Song, X.; Liu, J.; Tan, S.; Ju, Z. A physics-guided coordinated distributed MPC method for shape control of an antenna reflector. IEEE Trans. Cybern. 2021, 1–13. [Google Scholar] [CrossRef]
- Guemri, M.; Neffati, A.; Caux, S.; Ngueveu, S.U. Management of distributed power in hybrid vehicles based on D.P. or Fuzzy Logic. Optim. Eng. 2014, 15, 993–1012. [Google Scholar] [CrossRef]
- Cipek, M.; Kasać, J.; Pavković, D.; Zorc, D. A novel cascade approach to control variables optimisation for advanced series-parallel hybrid electric vehicle power-train. Appl. Energy 2020, 276, 115488. [Google Scholar] [CrossRef]
- Esser, A.; Eichenlaub, T.; Schleiffer, J.E.; Jardin, P.; Rinderknecht, S. Comparative evaluation of powertrain concepts through an eco-impact optimization framework with real driving data. Optim. Eng. 2021, 22, 1001–1029. [Google Scholar] [CrossRef]
- Sinoquet, D.; Rousseau, G.; Milhau, Y. Design optimization and optimal control for hybrid vehicles. Optim. Eng. 2011, 12, 199–213. [Google Scholar] [CrossRef] [Green Version]
- Škugor, B.; Deur, J.; Cipek, M.; Pavković, D. Design of a power-split hybrid electric vehicle control system utilizing a rule-based controller and an equivalent consumption minimization strategy. Proc. Inst. Mech. Eng. Part. D J. Automob. Eng. 2014, 228, 631–648. [Google Scholar] [CrossRef]
- Jimenez, P.; Lichota, P.; Agudelo, D.; Rogowski, K. Experimental validation of total energy control system for UAVs. Energies 2020, 13, 14. [Google Scholar] [CrossRef] [Green Version]
- Ulsoy, A.G.; Peng, H.; Çakmakci, M. Automotive Control Systems; Cambridge University Press: New York, NY, USA, 2012; pp. 126–130. [Google Scholar]
- Deur, J.; Ivanović, V.; Pavković, D.; Jansz, M. Identification and speed control of si engine for idle operating mode. In Proceedings of the SAE 2004 World Congress, Detroit, MI, USA, 8–11 March 2004; SAE Technical Paper No. 2004-01-0898. p. 12. [Google Scholar]
- Langouët, H.; Métivier, L.; Sinoquet, D.; Tran, Q.H. Engine calibration: Multi-objective constrained optimization of engine maps. Optim. Eng. 2011, 12, 407–424. [Google Scholar] [CrossRef]
- Lin, C.E.; Supsukbaworn, T.; Huang, Y.C.; Jhuang, K.T.; Li, C.H.; Lin, C.Y.; Lo, S.Y. Engine controller for hybrid powered dual quad-rotor system. In Proceedings of the 41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 1513–1517. [Google Scholar]
- Pavković, D.; Deur, J.; Kolmanovsky, I. Adaptive Kalman filter-based load torque compensator for improved SI engine idle speed control. IEEE Trans. Control Syst. Technol. 2009, 17, 98–110. [Google Scholar] [CrossRef]
- Schröder, D. Elektrische Antriebe-Regelung von Antriebssystemen; Springer: Berlin/Heidelberg, Germany, 2007; pp. 814–865. [Google Scholar]
- Carev, V.; Roháč, J.; Šipoš, M.; Schmirler, M. A multilayer brushless DC motor for heavy lift drones. Energies 2021, 14, 2504. [Google Scholar] [CrossRef]
- Pajchrowski, T.; Krystkowiak, M.; Matecki, D. Modulation variants in DC circuits of power rectifier systems with improved quality of energy conversion—Part I. Energies 2021, 14, 1876. [Google Scholar] [CrossRef]
- Krznar, M.; Piljek, P.; Kotarski, D.; Pavković, D. Modeling, control system design and preliminary experimental verification of a hybrid power unit suitable for multirotor UAVs. Energies 2021, 14, 2669. [Google Scholar] [CrossRef]
- Zhang, X.Z.; Wang, Y.N. A novel position-sensorless control method for brushless DC motors. Energy Convers. Manag. 2011, 52, 1669–1676. [Google Scholar] [CrossRef]
- Shao, J.; Nolan, D.; Hopkins, T. A novel direct back EMF detection for sensorless brushless DC (BLDC) motor drives. In Proceedings of the 17th Annual IEEE Applied Power Electronics Conference and Exposition (APEC 2002), Dallas, TX, USA, 10–14 March 2002; pp. 33–37. [Google Scholar]
- Krznar, M.; Kotarski, D.; Pavković, D.; Piljek, P. Propeller speed estimation for unmanned aerial vehicles using Kalman filtering. Int. J. Autom. Control. 2020, 14, 284–303. [Google Scholar] [CrossRef]
- Pavković, D.; Krznar, M.; Cipek, M.; Zorc, D.; Trstenjak, M. Internal combustion engine control system design suitable for hybrid propulsion applications. In Proceedings of the ICUAS 2020 Conference, Athens, Greece, 1–4 September 2020; pp. 1614–1619. [Google Scholar]
- Luenberger, D.G. Observing the state of a linear system. IEEE Trans. Mil. Electron. 1964, 8, 74–80. [Google Scholar] [CrossRef]
- Naslin, P. Essentials of Optimal Control; Illife Books: London, UK, 1968; Chapter 2. [Google Scholar]
- Mathew, T.; Sam, C.A. Modeling and closed-loop control of BLDC motor using an single current sensor. Int. J. Adv. Res. Electr. Eng. Instrum. Eng. 2013, 2, 2525–2531. [Google Scholar]
- Williams, B.W. Power Electronics: Devices, Drivers, Applications and Passive Components; McGraw-Hill: New York, NY, USA, 1992; pp. 772–789. [Google Scholar]
- Kong, H.; Liu, J.; Cui, G. Study on Field-Weakening Theory of Brushless DC Motor Based on Phase Advance Method. In Proceedings of the 2010 International Conference on Measuring Technology and Mechatronics Automation, Changsha, China, 3–14 March 2010; pp. 583–586. [Google Scholar]
- Pavković, D.; Deur, J. Modeling and Control of Electronic Throttle Drive: A practical Approach-from Experimental Characterization to Adaptive Control and Application; Lambert Academic Publishing: Saarbrücken, Germany, 2011; pp. 123–131. [Google Scholar]
- Pavković, D.; Lobrović, M.; Hrgetić, M.; Komljenović, A. A Design of Cascade Control System and Adaptive Load Compensator for Battery/Ultracapacitor Hybrid Energy Storage-based Direct Current Microgrid. Energy Convers. Manag. 2016, 114, 154–167. [Google Scholar] [CrossRef]
- Pavković, D.; Cipek, M.; Kljaić, Z.; Mlinarić, T.J.; Hrgetić, M.; Zorc, D. Damping Optimum-Based Design of Control Strategy Suitable for Battery/Ultracapacitor Electric Vehicles. Energies 2018, 11, 2854. [Google Scholar] [CrossRef] [Green Version]
- Pavković, D.; Šprljan, P.; Cipek, M.; Krznar, M. Cross-axis control system design for borehole drilling based on damping optimum criterion and utilization of proportional-integral controllers. Optim. Eng. 2021, 22, 51–81. [Google Scholar] [CrossRef]
- Gu, J.; Ouyang, M.; Li, J.; Lu, D.; Fang, C.; Ma, Y. Driving and braking control of PM synchronous motor based on low-resolution Hall sensor for battery electric vehicle. Chin. J. Mech. Eng. 2013, 26, 1–10. [Google Scholar] [CrossRef]
- Krznar, M. Modelling and Control of Hybrid Propulsion Systems for Multirotor Unmanned Aerial Vehicles. Ph.D. Dissertation, Faculty of Mechanical Engineering and Naval Architecture, University of Zagreb, Zagreb, Croatia, 2020. [Google Scholar]
- FoxTech Co. Available online: https://www.foxtechfpv.com/t-motor-u12ii-kv120.html (accessed on 5 July 2021).
- DSS2x101-02A High Performance Schottky Diode; Data Sheet No. 20110603A; IXYS Corp.: Leiden, The Netherlands, 2011. [Google Scholar]
- Titan ZG 45PCI-HV. Technical Manual; Tony Clark GmbH: Luebbecke, Germany, 2012.
- Cipek, M.; Petrić, J.; Pavković, D. A Novel Approach to Hydraulic Drive Sizing Methodology and Efficiency Estimation based on Willans Line. J. Sustain. Dev. Energy Water Environ. Syst. 2019, 7, 155–167. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Electrical Angle pαg | 0–π/3 | π/3–2π/3 | 2π/3–π | π–4π/3 | 4π/3–5π/3 | 5π/3–2π |
|---|---|---|---|---|---|---|
| Stator phases connected to DC bus | 1 and 3 | 3 and 2 | 3 and 2 | 2 and 1 | 2 and 1 | 1 and 3 |
| Symbol | Description | Value |
|---|---|---|
| Keq | BLDC machine equivalent EMF/torque gain | 0.24 Vs/rad |
| Leq | BLDC machine equivalent inductance | 0.2 mH |
| Req | BLDC machine equivalent resistance | 49.4 mΩ |
| p | BLDC machine number of pole pairs | 4 |
| rd | Dynamic resistance of semiconductor switch/diode | 2.7 mΩ |
| Cdc | Rectifier DC bus capacitance | 10 mF |
| Tf | Current/voltage filter time constant | 1 ms |
| ϑ | ICE intake air temperature | 303 K |
| R | Universal gas constant | 287 J/(Kg⋅K) |
| V | ICE intake manifold volume | 100 cm3 |
| Kmt | ICE torque development gain | 10 Nm/rad |
| Tm | ICE intake manifold time constant | 10 ms |
| Td | ICE combustion delay | 26.7 ms |
| Tθ | ICE throttle unit delay | 25 ms |
| Jt | Overall inertia at ICE shaft | 10−3 kgm2 |
| Kp | ICE “pumping” gain | 10−4 s |
| ig | Generator vs. ICE gearbox ratio | 3.2 |
| Kci | BLDC generator current PI controller proportional gain | 0.055 |
| Tci | BLDC generator current PI controller integral time constant | 3.3 ms |
| Kcu | DC bus voltage PI controller proportional gain | 0.611 |
| Tcu | DC bus voltage PI controller integral time constant | 40.9 ms |
| KR | Engine speed PID controller proportional gain | 0.00085 |
| TI | Engine speed PID controller integral time constant | 0.217 s |
| TD | Engine speed PID controller derivative time constant | 0.014 s |
| Kie | BLDC generator speed estimator gain (current update) | 7.53 A/A |
| Kee | BLDC generator speed estimator gain (EMF update) | 27.44 V/A |
| KLe | DC bus load estimator gain (load current update) | 800 A/V |
| Kdce | DC bus load estimator gain (DC bus voltage update) | 400 V/V |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krznar, M.; Pavković, D.; Cipek, M.; Benić, J. Modeling, Controller Design and Simulation Groundwork on Multirotor Unmanned Aerial Vehicle Hybrid Power Unit. Energies 2021, 14, 7125. https://doi.org/10.3390/en14217125
Krznar M, Pavković D, Cipek M, Benić J. Modeling, Controller Design and Simulation Groundwork on Multirotor Unmanned Aerial Vehicle Hybrid Power Unit. Energies. 2021; 14(21):7125. https://doi.org/10.3390/en14217125
Chicago/Turabian StyleKrznar, Matija, Danijel Pavković, Mihael Cipek, and Juraj Benić. 2021. "Modeling, Controller Design and Simulation Groundwork on Multirotor Unmanned Aerial Vehicle Hybrid Power Unit" Energies 14, no. 21: 7125. https://doi.org/10.3390/en14217125
APA StyleKrznar, M., Pavković, D., Cipek, M., & Benić, J. (2021). Modeling, Controller Design and Simulation Groundwork on Multirotor Unmanned Aerial Vehicle Hybrid Power Unit. Energies, 14(21), 7125. https://doi.org/10.3390/en14217125