According to the IPS in
Figure 8, the tests performed on a laboratory bench used a system composed of a synchronous generator
and an induction generator
, connected in parallel [
41]. The generators feed a nonlinear load
(TPACVC) that consists of a three-phase rectifier that feeds a 14 kW resistive load. The primary machine used for
was a diesel cycle engine with
kW of power, and the primary machine used for
was an induction motor with
kW, driven by a frequency inverter with
kW of power.
Table 1 presents in detail the components technical specifications used in the laboratory bench.
The simulations performed with the IPS in
Figure 8 used a model determined by parametric regression technique [
69]. In the model designing process, a hybrid strategy was adopted, consisting of Nelder-Mead and Genetic Algorithm methods association. Using the computational model, it is possible to run simulations that would be unfeasible with the real system, allowing the elaboration of different prediction types. Furthermore, the system input parameters can use a wider variation ranges, enabling the improvement of sensitivity analysis process. However, in performed studies, the system input parameters values were changed within the range of feasible values, in order to eliminate conditions that could compromise its physical limit. As the system input parameters have different variation ranges and considering that some of them can vary only in the vicinity of their reference values, the analytical method [
60] of sensitivity analysis is suitable for experiments involving this system.
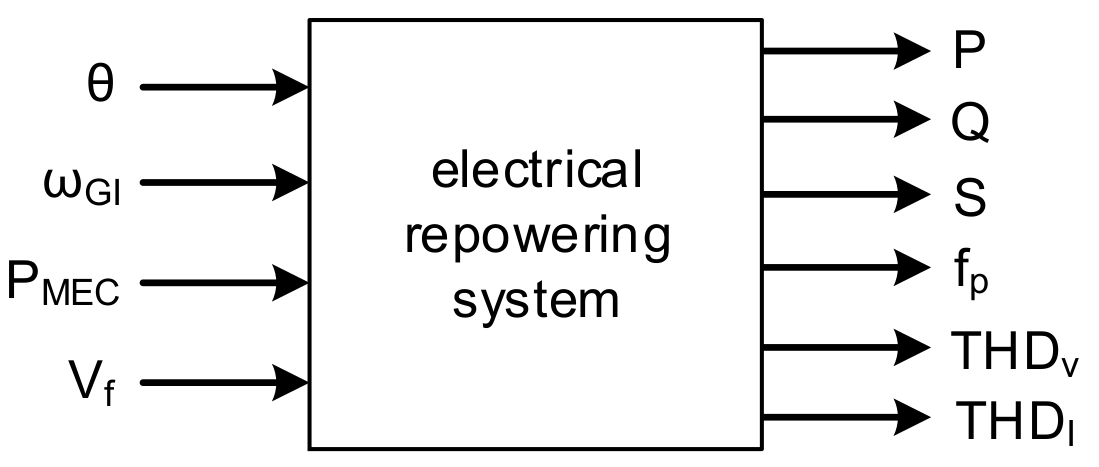
4.1. Sensitivity Analysis and Parameters Suppression of Electrical Repowering System
The electrical repowering system sensitivity analysis was performed for both experimental tests and computational simulations results.
Table 2 [
41] has base values of input parameters
,
,
, and
and their respective variation ranges within the feasible operating space of the system. The base values chosen are equivalent to median values relative to the lower and upper limits accepted by the laboratory bench. The variation range adopted for system input parameters values is greater in computer simulations than in experiments with the laboratory bench, allowing system analysis under a greater number of operating regimes.
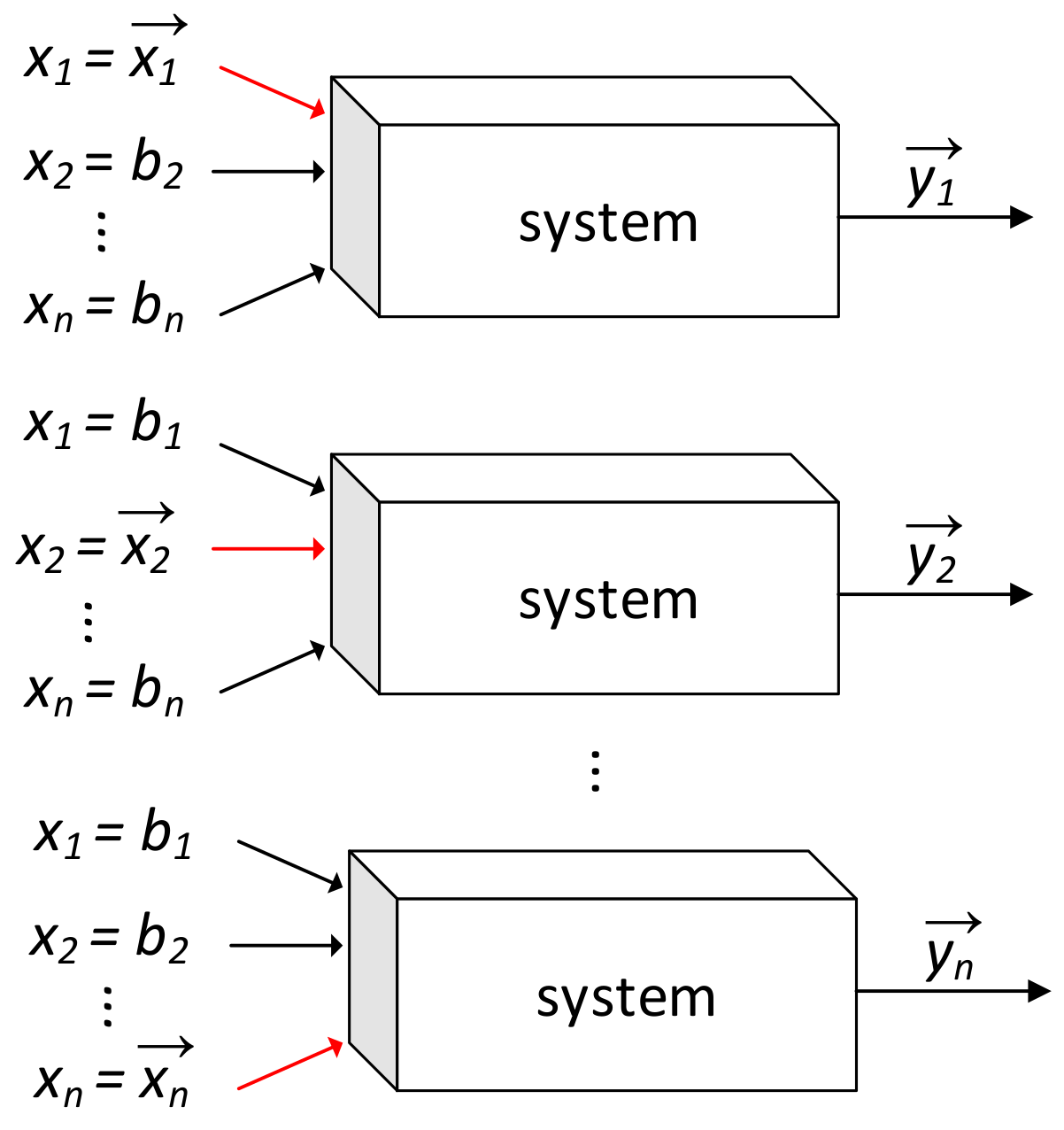
Experiments with the laboratory bench and computer simulations were carried out, varying the parameters in
Table 2 one-at-a-time, considering their respective base values as reference and collecting outputs
P,
Q,
S,
,
, and
. Using (
1), the sensitivity indices were calculated for each system input parameter relative to each output.
Table 3 [
41] provides the results. For the sensitivity analysis process, each input parameter used 61 linearly spaced values considering their respective variation ranges. On average, both in experimental tests and simulations, of four analyzed parameters,
is the one with highest sensitivity, followed by
,
, and
.
Considering the fact that the sensitivity index value of the parameter
is the smallest for output
P and the fact that the sensitivity index value of the parameter
is the smallest for
Q,
S,
,
, and
outputs, we suppress these parameters according to the methodology presented in
Section 3.1.
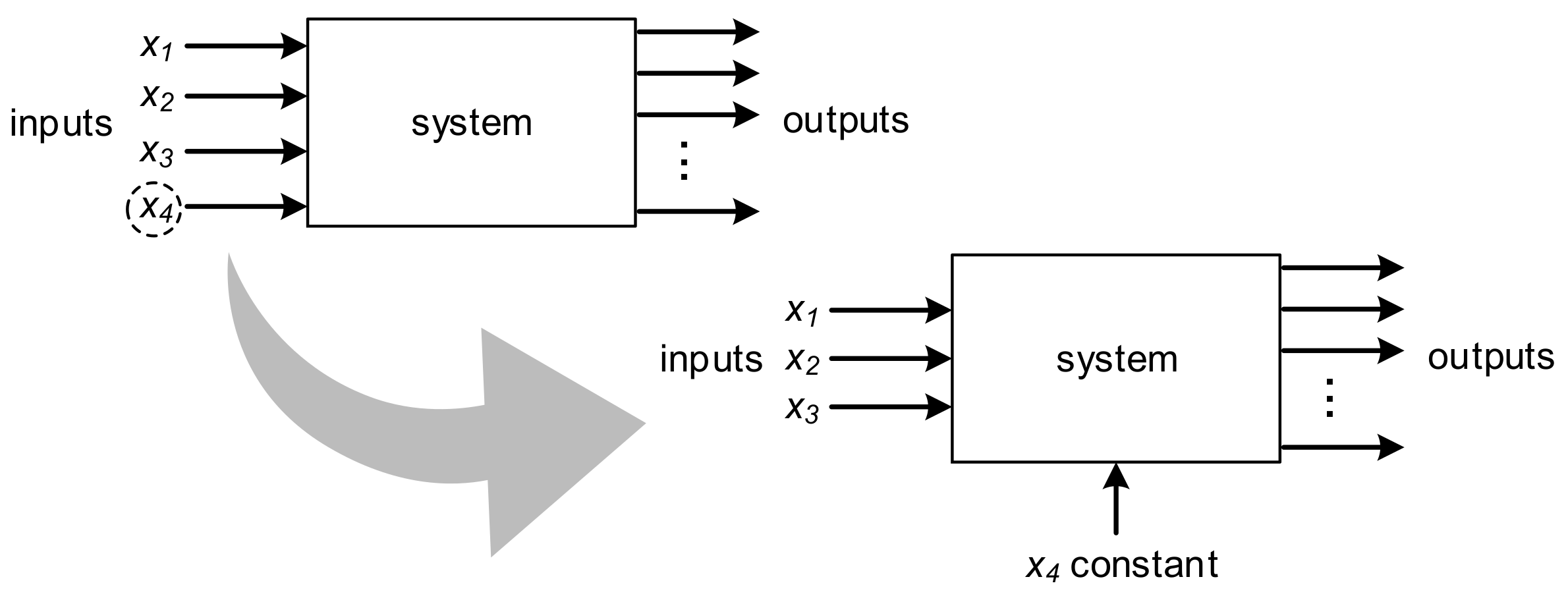
Figure 10 represents the electrical repowering system with reduced quantity from four to three input parameters.
Figure 10a,b represent the system with suppression of the parameters
and
, respectively. As the electrical repowering system is a nonlinear system, the suppression of some of its input parameters implies the modification of the remaining parameter’s sensitivity indices values. Thus, we performed two new sensitivity analysis processes: one considering the suppression of the
parameter and the other considering the suppression of
. These new analyses used base values and ranges, the results of which are displayed in
Table 2 and
Table 4.
Sensitivity indices for output
P, relative to the analysis of the system with four and three inputs, considering the suppression of
, are given in
Table 4. For
Q,
S,
,
and
outputs,
Table 4 has the sensitivity indices relative to the analysis of the system with four and three entries, considering the suppression of
.
Analyzing
Table 4 for output
P, considering the analysis with four variables, the sensitivity of parameter
was 41% and that parameter
was 45%. In the analysis considering three variables (suppressing
), the sensitivity of parameter
was 32% and parameter
was 56%. Therefore, comparing the analyses with four and three parameters, it is observed that the sensitivity of the parameter
varied 22% and the sensitivity of the parameter
varied 24%, confirming these parameters as the most sensitive relative to the output
P. For
Q output, when comparing the analyses with four and three parameters (suppressing parameter
), parameters
and
were the ones with the highest sensitivity, with a reduced variation percentage between analyses.
According to
Table 4,
and
were the parameters with the highest sensitivity relative to outputs
S,
,
, and
, both in the analyses considering four parameters as for analyses considering three parameters and suppression of
. Comparing analyses, the variation of parameters
and
was equal to 10%, considering output
S. For
output, the variation of parameters
and
was 5%. Variations of
and
were equal to 12% and 9%, respectively, for output
. For output
, the variation of both
and
was 8%, considering both analyses.
Still examining
Table 4, it is possible to notice that the suppressed parameter sensitivity index value is distributed among other parameters, with a tendency of a higher increase in the most sensitive parameter index value. Therefore, suppressing the
parameter in analyses involving the
P output and suppressing the
parameter in analyses involving
Q,
S,
,
, and
outputs do not harm the developed model accuracy for the electrical repowering system.
4.2. Electrical Repowering System Stability
In order to validate the proposed system stability metric, we applied it to the model developed for the electrical repowering system. To do so, we establish the sequence
with different operating scenarios, varying the input parameters values of the modeled system, as shown in
Table 5. The scenario
refers to the base case, defined in the sensitivity analysis section (
Section 4.1). Scenarios
,
,
and
varied the input parameters
and
values by
,
,
and
, respectively, relative to base case. The value of input parameter
in scenarios
,
,
, and
varied by
,
,
, and
, respectively, relative to the base case. The upper limit of 1860 rpm observed in
arises from the limit rotation of the induction motor connected to
and the lower limit of 1800 rpm in
comes from the fact that below such speed,
operates as a motor. The input parameter
had its value varied by
,
, and
, relative to the base case, in scenarios
,
, and
, respectively. In
the variation was
relative to the base case. This variation is due to the fact that the limit value of
for
to operate as an inductive machine (i.e., receive reactive power from the network) is
V.
Considering the input parameters values of
Table 5, it is possible to establish the following assumptions: (i) harmonic distortion in the system increases as value of
increases, (ii) as
and
increase, the active power
P also increases, and (iii) the increase of
implies the increase in reactive power
Q.
After performing the sensitivity analysis process considering each scenario in
Table 5, we calculated the stability of each input parameter relative to the system outputs using (
3). The values obtained for stabilities
,
,
, and
relative to system outputs
P,
Q,
S,
,
, and
are arranged in
Table 6.
Based on
Table 6, it is possible to observe that in scenarios
and
, considering the average row, the input parameters
and
are the most stable relative to system outputs, followed by
and
. In
and
scenarios: (i) parameters
and
are the most stable relative to system output
P, followed by
and
, and (ii) parameters
and
are the most stable relative to the other system outputs, followed by
and
. In
scenario: (i) parameters
and
are the most stable relative to outputs
P and
, followed by
and
, (ii) relative to outputs
Q and
S, parameters
and
are the most stable, followed by
and
, (iii) considering output
, parameters
and
are the most stable, followed by
and
, and (iv) for output
, parameter
is the most stable, followed by parameters
,
, and
.
Considering the average row of all scenarios arranged in
Table 6, it is possible to see: (i)
and
are the most stable input parameters, followed by parameters
and
, (ii) the
parameter stability remains practically constant, (iii) there is a small reduction in stability of parameter
, (iv) there is a slight increase in stability of parameter
, and (v) parameter
has greater stability in scenarios with greater variation (i.e.,
and
) compared with the base scenario.
Comparing stability values of
relative to
, and then with each scenario average rows in
Table 6, we observe a constant variation of approximately 81%. Even increasing
, this parameter’s stability relative to
remains stable.
Analyzing
Table 6, it is possible to see that stability values of
and
relative to
P decrease in each scenario, being smaller than their respective values in the average rows. Considering these analyses and
Table 1, we can affirm that the powers of
and
machines influence stability. The power of
is five times greater than the power of
, which implies that
impacts the active power flow
P more than
.
Comparing the stability values of
relative to
Q, and then with each scenario average row in
Table 6, it is possible to observe variations of 30.12%, 31.42%, 48.71%, 53.11% and 62%. This increasing percentage of variation confirms the relationship between parameter
and output
Q, since as
increases, its stability relative to
Q also increases.
Table 7 displays the differences between maximum and minimum stability value,
, of each parameter relative to the system outputs, considering each scenario from
Table 6. For example, as the greatest stability value of
relative to output
P is
and the smallest value is
, the difference between these values (
) is in the first row and first column of
Table 7. The
input parameter showed the smallest difference between maximum and minimum stability values relative to all outputs. This fact confirms this parameter’s high stability, even when the electrical repowering system operates in different studied scenarios.
The observed difference between maximum and minimum stability values of all input parameters relative to
in
Table 7 was equal to
, except for
(with a value of ≈
). In parallel, the difference between the maximum and minimum stability values of
relative to
was the third-largest recorded, being higher than the other differences observed for this output. These facts indicate the induction generator
capacity to absorb harmonic distortions, which confirms the results of Magalhães et al. [
41].
Considering scenario
and suppressing
(
Section 3.1), we performed a new stability analysis.
Table 8 displays the obtained values for
,
, and
stabilities relative to outputs
P,
Q,
S,
,
, and
. We observe that stability values obtained after the parameter suppression are the same as in scenario
of
Table 6, if we disregard the column referring to
. Therefore, the stability of the electrical repowering system does not change when considering the input parameter
constant.


 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}