
Three-Dimensional Unsteady Aerodynamic Analysis of a Rigid-Framed Delta Kite Applied to Airborne Wind Energy

 , , and
, , and
Abstract
:1. Introduction
2. Methodology
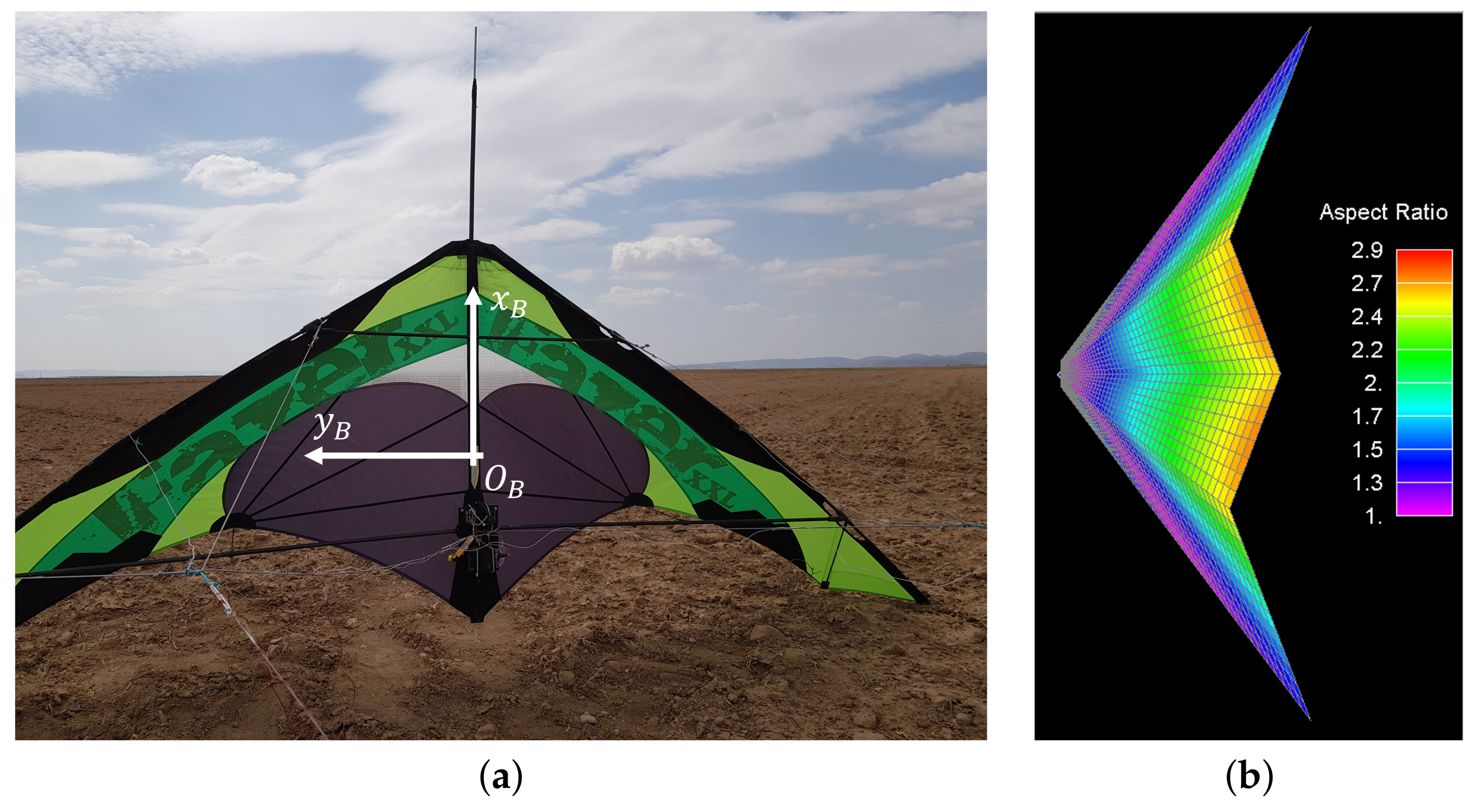
2.1. Flight Test Campaign
2.2. In-House Three-Dimensional Unsteady Panel Method (UnPaM)
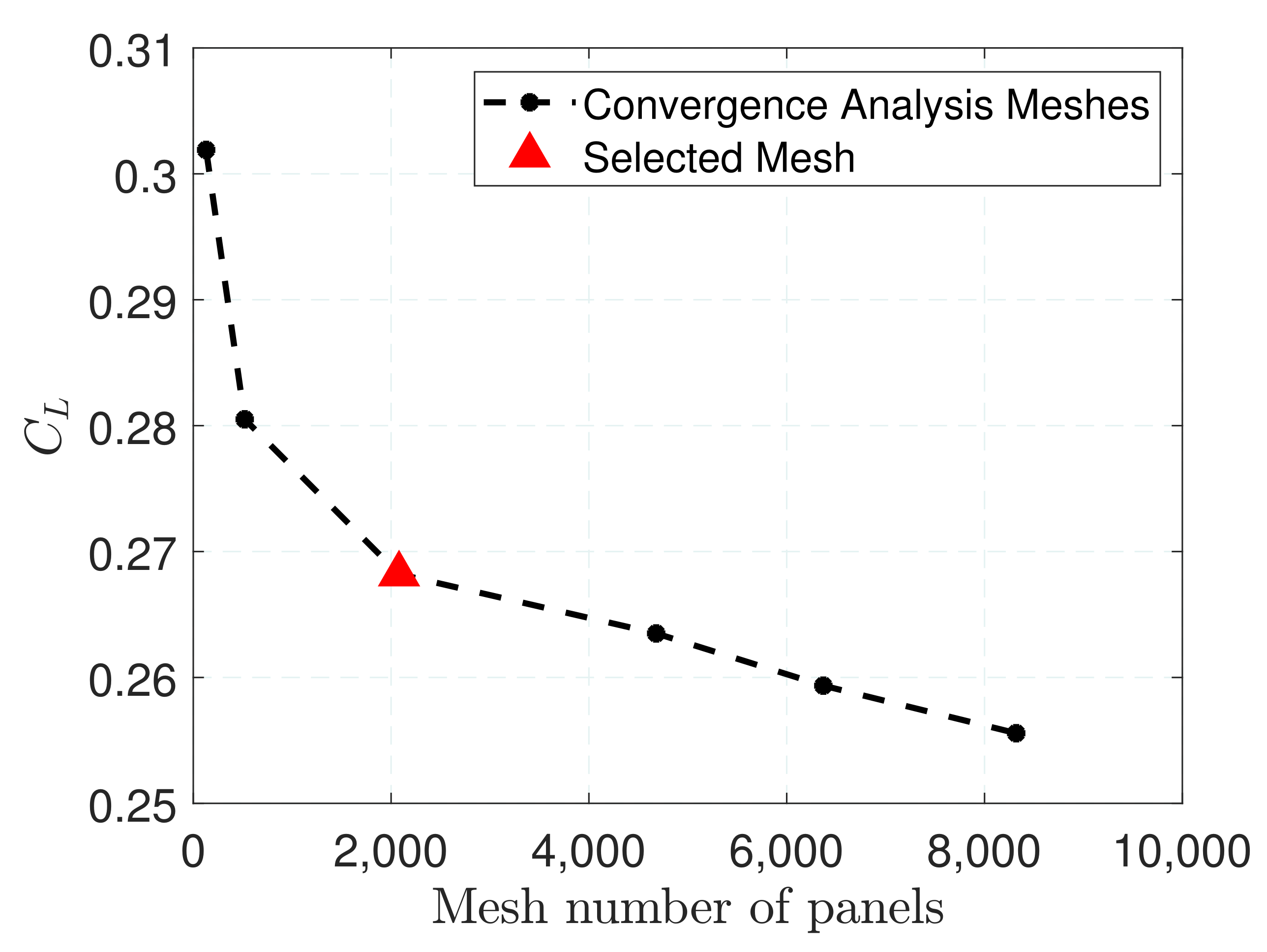
2.2.1. Aerodynamic Mesh
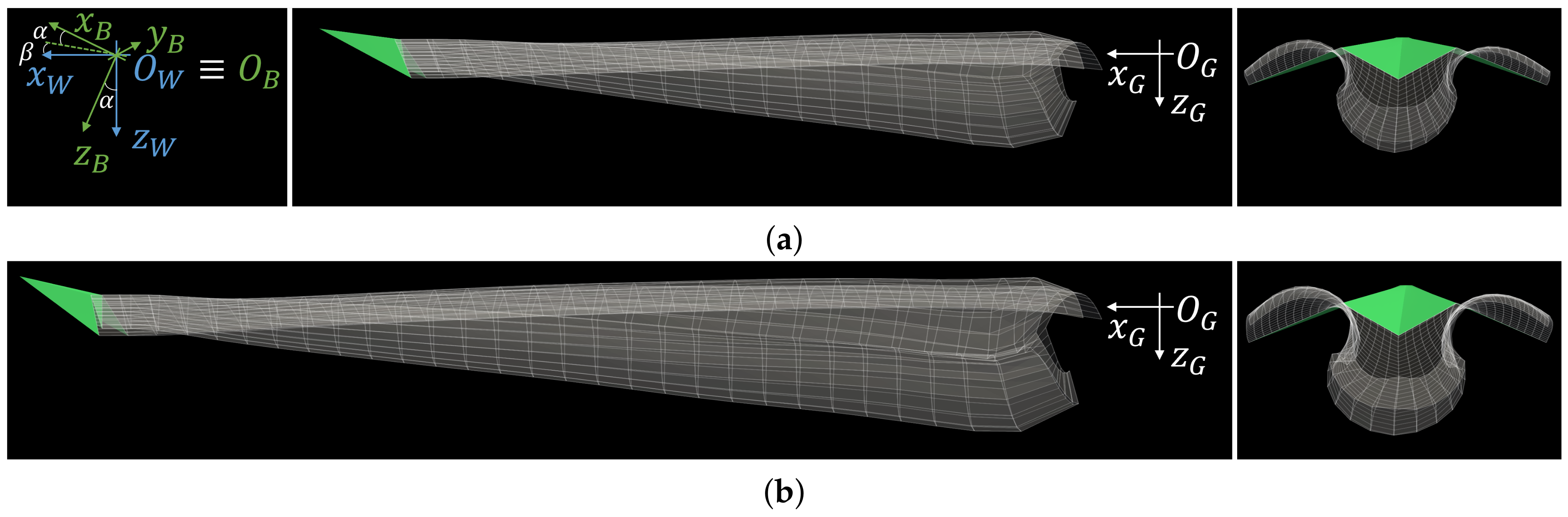
2.2.2. Kinematic Module of UnPaM
2.2.3. Force and Moment Coefficients Computation with UnPaM
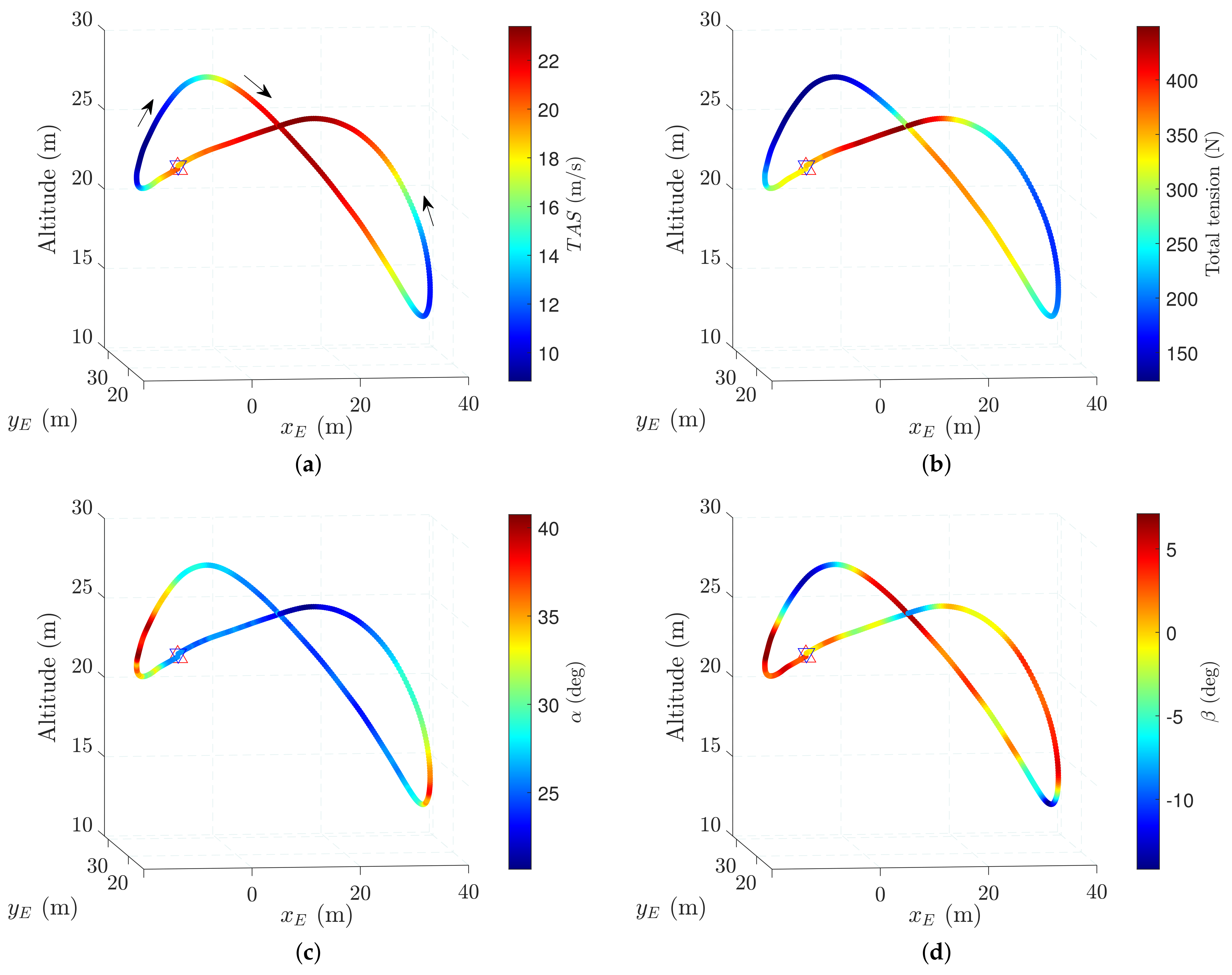
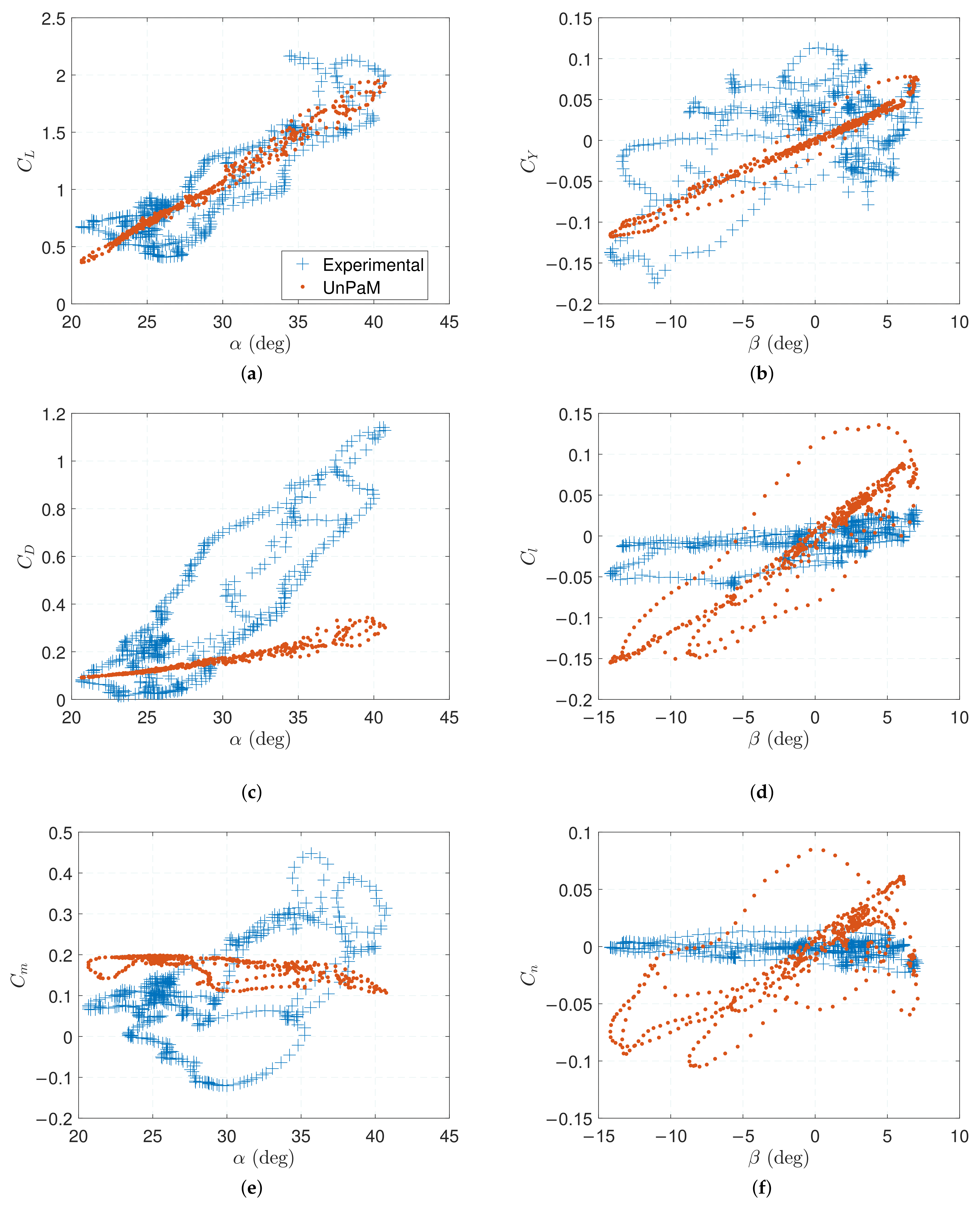
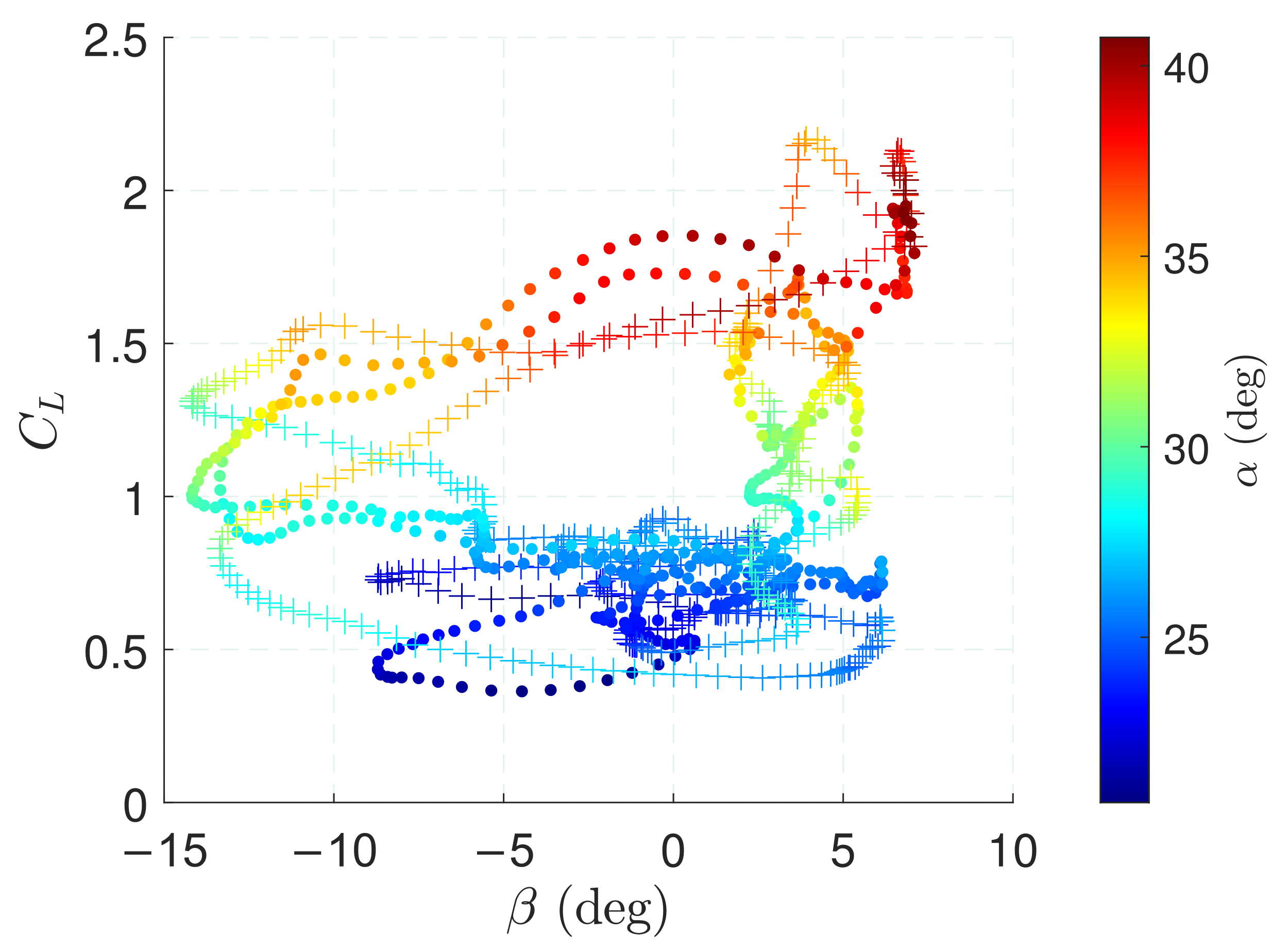
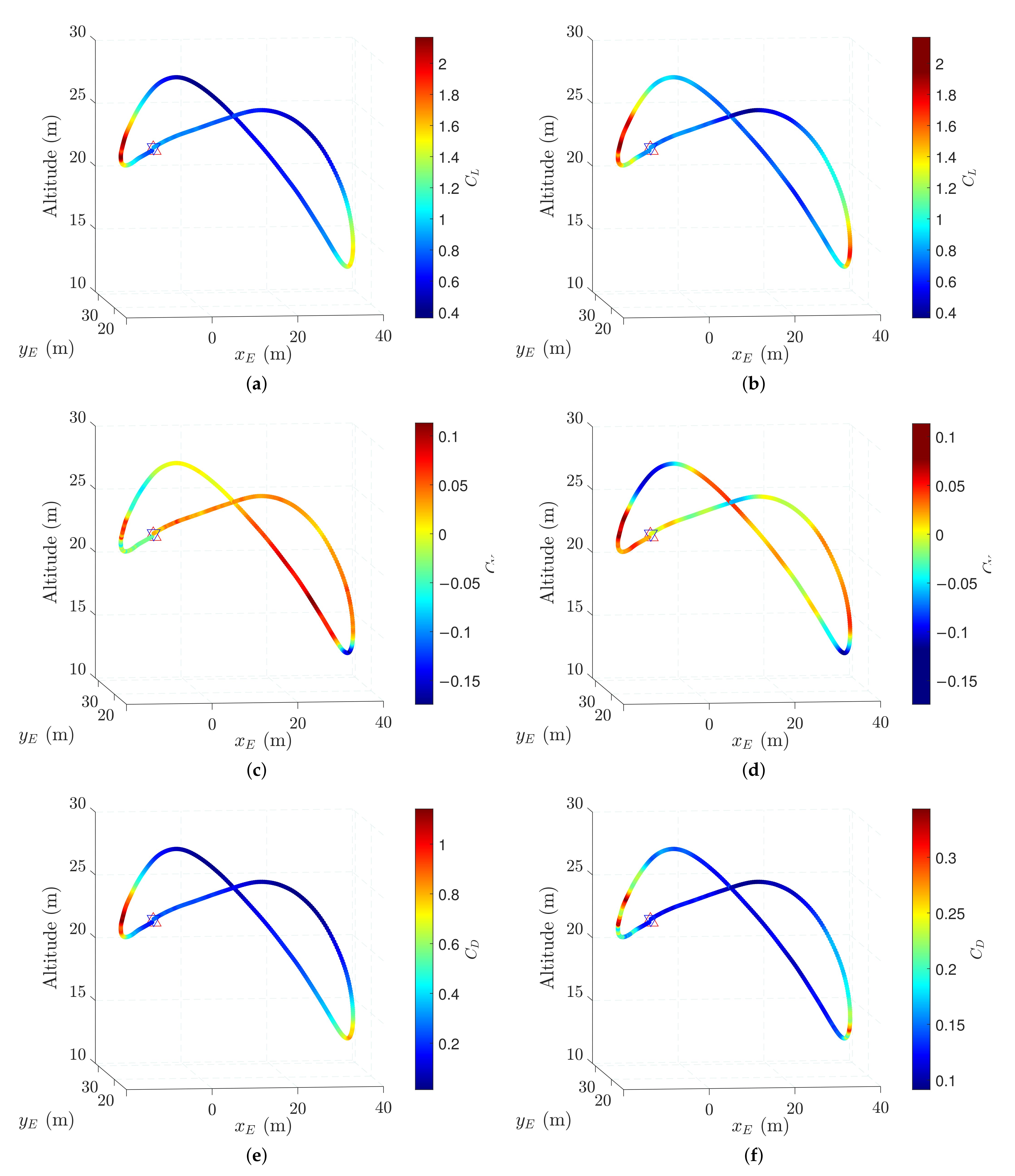
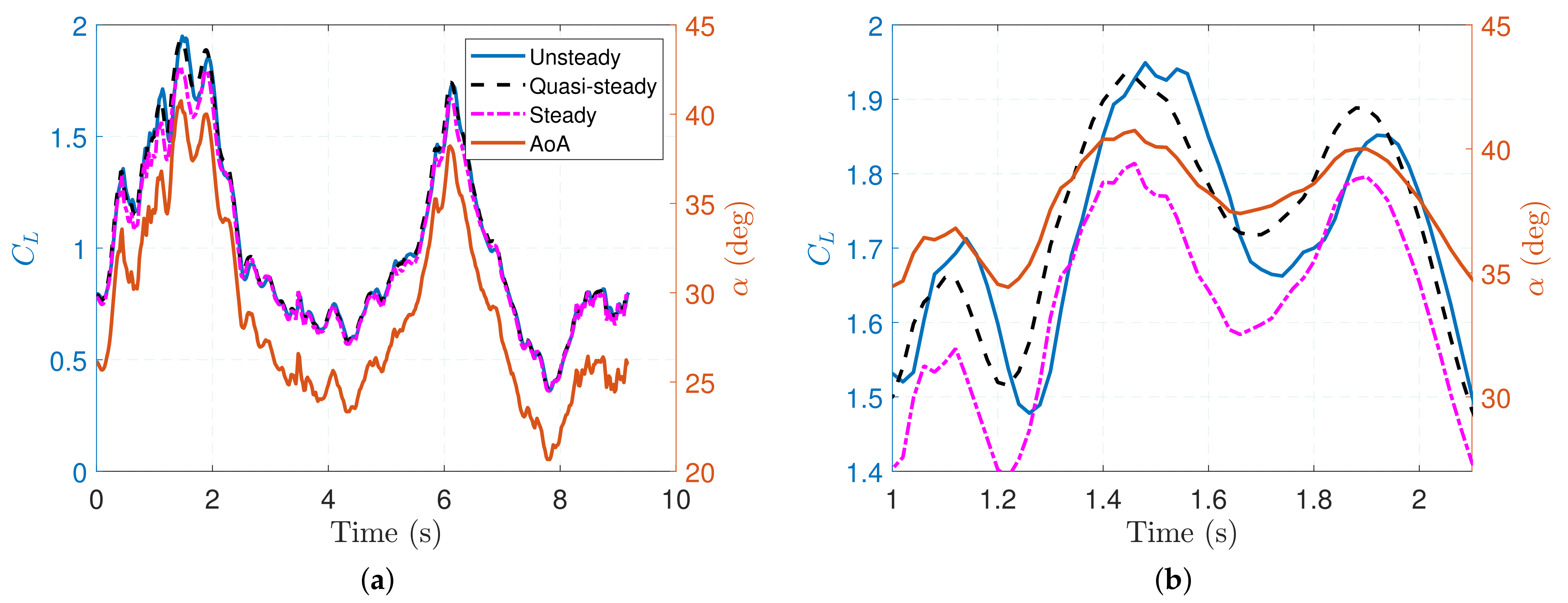
3. Comparison of Numerical and Experimental Results
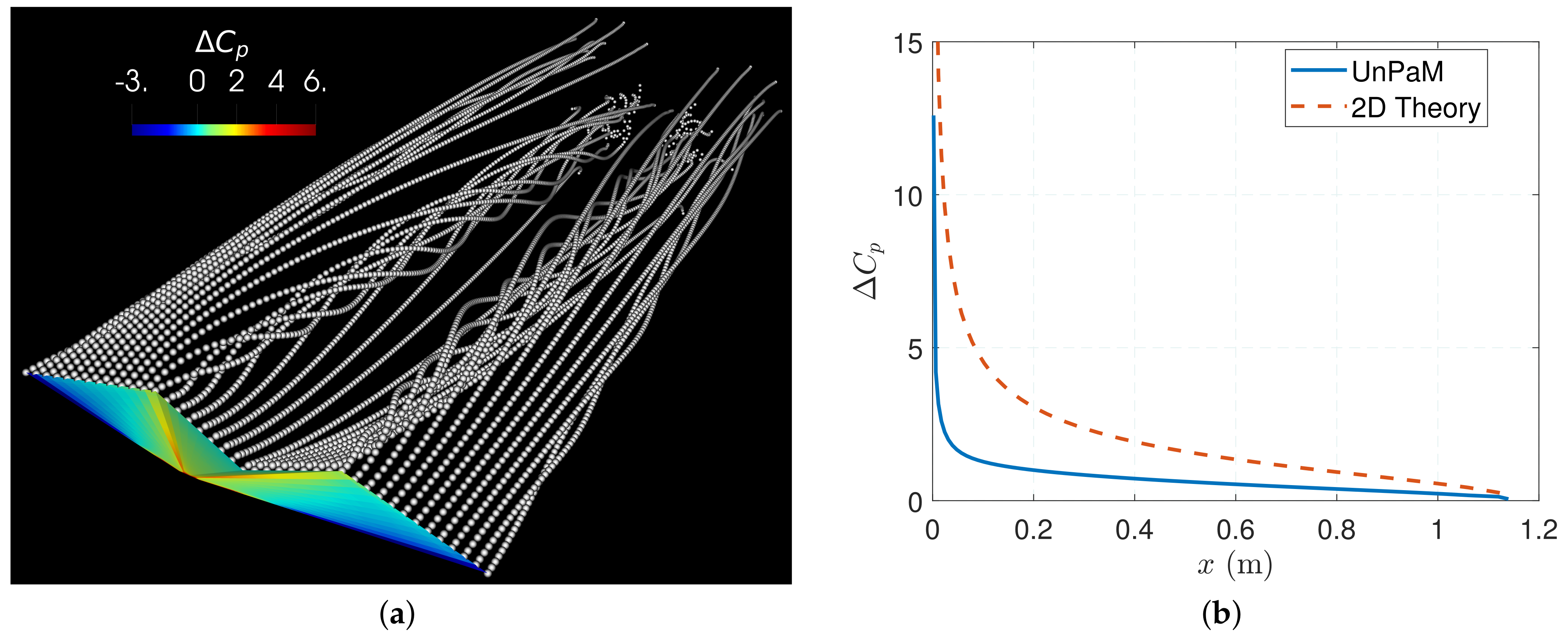
4. Analysis of the Potential Flow
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| AWE | Airborne Wind |
| CM | Kite Center of Mass |
| GNSS | Global Navigation Satellite System |
| IMU | Inertial Measurement Unit |
| LE | Leading Edge |
| LEI | Leading Edge Inflatable |
| RANS | Reynolds-Averaged Navier-Stokes |
| RFD | Rigid-Framed Delta |
| TE | Trailing Edge |
| UnPaM | Unsteady Panel Method |
| VLM | Vortex Lattice Method |
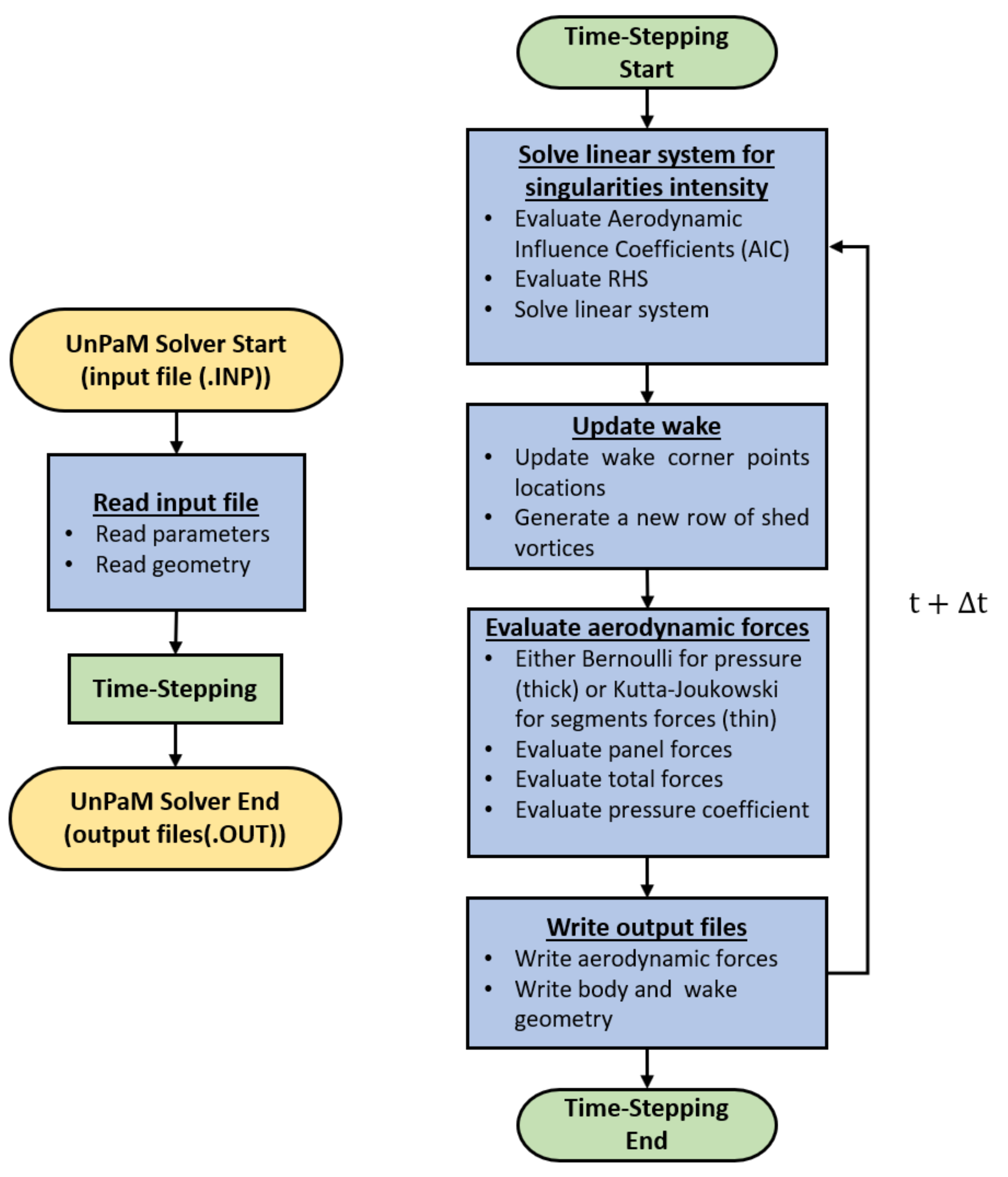
Appendix A. UnPaM High-Level Flowchart

References
- European Commission. Study on Challenges in the Commercialisation of Airborne Wind Energy Systems; Technical Report; EU Publications: Brussels, Belgium, 2018. [Google Scholar] [CrossRef]
- Vimalakanthan, K.; Caboni, M.; Schepers, G.; Pechenik, E.; Williams, P. Aerodynamic analysis of Ampyx’s airborne wind energy system. J. Phys. Conf. Ser. 2018, 1037, 062008. [Google Scholar] [CrossRef] [Green Version]
- Malz, E.; Koenemann, J.; Sieberling, S.; Gros, S. A reference model for airborne wind energy systems for optimization and control. Renew. Energy 2019, 140, 1004–1011. [Google Scholar] [CrossRef]
- Mehr, J.; Alvarez, E.J.; Ning, A. Unsteady aerodynamic analysis of wind harvesting aircraft. Aiaa Aviat. 2020 Forum 2020, 1, 1–13. [Google Scholar] [CrossRef]
- Wijnja, J.; Schmehl, R.; De Breuker, R.; Jensen, K.; Lind, D.V. Aeroelastic analysis of a large airborne wind turbine. J. Guid. Control. Dyn. 2018, 41, 2374–2385. [Google Scholar] [CrossRef]
- Viré, A.; Demkowicz, P.; Folkersma, M.; Roullier, A.; Schmehl, R. Reynolds-averaged Navier-Stokes simulations of the flow past a leading edge inflatable wing for airborne wind energy applications. J. Phys. Conf. Ser. 2020, 1618. [Google Scholar] [CrossRef]
- Ali, Q.S.; Kim, M.H. Unsteady aerodynamic performance analysis of an airborne wind turbine under load varying conditions at high altitude. Energy Convers. Manag. 2020, 210, 112696. [Google Scholar] [CrossRef]
- Saleem, A.; Kim, M.H. Aerodynamic performance optimization of an airfoil-based airborne wind turbine using genetic algorithm. Energy 2020, 203, 117841. [Google Scholar] [CrossRef]
- Cherubini, A.; Papini, A.; Vertechy, R.; Fontana, M. Airborne Wind Energy Systems: A review of the technologies. Renew. Sustain. Energy Rev. 2015, 51, 1461–1476. [Google Scholar] [CrossRef] [Green Version]
- Vermillion, C.; Cobb, M.; Fagiano, L.; Leuthold, R.; Diehl, M.; Smith, R.S.; Wood, T.A.; Rapp, S.; Schmehl, R.; Olinger, D.; et al. Electricity in the air: Insights from two decades of advanced control research and experimental flight testing of airborne wind energy systems. Annu. Rev. Control. 2021. [Google Scholar] [CrossRef]
- Licitra, G.; Williams, P.; Gillis, J.; Ghandchi, S.; Sieberling, S.; Ruiterkamp, R.; Diehl, M. Aerodynamic Parameter Identification for an Airborne Wind Energy Pumping System. IFAC-PapersOnLine 2017, 50, 11951–11958. [Google Scholar] [CrossRef]
- Licitra, G.; Bürger, A.; Williams, P.; Ruiterkamp, R.; Diehl, M. Aerodynamic model identification of an autonomous aircraft for airborne wind energy. Optim. Control Appl. Methods 2019, 40, 422–447. [Google Scholar] [CrossRef]
- Leuthold, R. Multiple-Wake Vortex Lattice Method for Membrane-Wing Kites; Technical Report; Delft University of Technology: Delft, The Netherlands, 2015. [Google Scholar] [CrossRef]
- Candade, A.A.; Ranneberg, M.; Schmehl, R. Structural analysis and optimization of a tethered swept wing for airborne wind energy generation. Wind Energy 2020, 23, 1006–1025. [Google Scholar] [CrossRef]
- Candade, A.A.; Ranneberg, M.; Schmehl, R. Aero-structural Design of Composite Wings for Airborne Wind Energy Applications. J. Phys. Conf. Ser. 2020, 1618. [Google Scholar] [CrossRef]
- Ranneberg, M. Direct Wing Design and Inverse Airfoil Identification with the Nonlinear Weissinger Method. arXiv 2015, arXiv:1501.04983v2. [Google Scholar]
- Fasel, U.; Keidel, D.; Molinari, G.; Ermanni, P. Aerostructural optimization of a morphing wing for airborne wind energy applications. Smart Mater. Struct. 2017, 26, 095043. [Google Scholar] [CrossRef]
- Fasel, U.; Tiso, P.; Keidel, D.; Molinari, G.; Ermanni, P. Reduced-order dynamic model of a morphing airborne wind energy aircraft. AIAA J. 2019, 57, 3586–3598. [Google Scholar] [CrossRef]
- Folkersma, M.; Schmehl, R.; Viré, A. Boundary layer transition modeling on leading edge inflatable kite airfoils. Wind Energy 2019, 22, 908–921. [Google Scholar] [CrossRef] [PubMed]
- Bosch, A.; Schmehl, R.; Tiso, P.; Rixen, D. Dynamic nonlinear aeroelastic model of a kite for power generation. J. Guid. Control. Dyn. 2014, 37, 1426–1436. [Google Scholar] [CrossRef] [Green Version]
- Breukels, J.; Schmehl, R.; Ockels, W. Aeroelastic Simulation of Flexible Membrane Wings based on Multibody System Dynamics. In Airborne Wind Energy. Green Energy and Technology; Springer: Delft, The Netherlands, 2013; pp. 287–305. [Google Scholar] [CrossRef]
- Thedens, P.; de Oliveira, G.; Schmehl, R. Ram-air kite airfoil and reinforcements optimization for airborne wind energy applications. Wind Energy 2019, 22, 653–665. [Google Scholar] [CrossRef]
- Fagiano, L.; Huynh, K.; Bamieh, B.; Khammash, M. On Sensor Fusion for Airborne Wind Energy Systems. IEEE Trans. Control Syst. Technol. 2014, 22, 930–943. [Google Scholar] [CrossRef] [Green Version]
- Hesse, H.; Polzin, M.; Wood, T.A.; Smith, R.S. Visual motion tracking and sensor fusion for kite power systems. In Airborne Wind Energy. Green Energy Technology; Springer: Delft, The Netherlands, 2018; Volume 9789811019, pp. 413–438. [Google Scholar] [CrossRef]
- Hummel, J.; Göhlich, D.; Schmehl, R. Automatic measurement and characterization of the dynamic properties of tethered membrane wings. Wind Energy Sci. 2019, 4, 41–55. [Google Scholar] [CrossRef] [Green Version]
- Oehler, J.; Schmehl, R. Aerodynamic characterization of a soft kite by in situ flow measurement. Wind Energy Sci. 2019, 4, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Hoff, J.; Cook, M. Aircraft parameter identification using an estimation-before-modelling technique. Aeronaut. J. 1968, 100, 259–268. [Google Scholar]
- Borobia-Moreno, R.; Ramiro-Rebollo, D.; Schmehl, R.; Sánchez-Arriaga, G. Identification of kite aerodynamic characteristics using the estimation before modeling technique. Wind Energy 2021, 24, 596–608. [Google Scholar] [CrossRef]
- Borobia, R.; Serino, A.; Schmehl, R. Flight-Path Reconstruction and Flight Test of Four-Line Power Kites. J. Guid. Control. Dyn. 2018, 41, 2604–2614. [Google Scholar] [CrossRef] [Green Version]
- Sánchez-Arriaga, G.; Pastor-Rodríguez, A.; Sanjurjo-Rivo, M.; Schmehl, R. A lagrangian flight simulator for airborne wind energy systems. Appl. Math. Model. 2019, 69, 665–684. [Google Scholar] [CrossRef] [Green Version]
- Cavallaro, R.; Nardini, M.; Demasi, L.; Santarpia, E. Amphibious prandtlplane: Preliminary design aspects including propellers integration and ground effect. Special Session: Challenges in the Design of Joined Wings II, AIAA 2015-1185 2015. 56th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Kissimmee, Florida, 5–9 January 2015; 2015. [Google Scholar] [CrossRef]
- Nardini, M. A Computational Multi-Purpose Unsteady Aerodynamic Solver for the Analysis of Innovative Wing Configurations, Helicopter Blades and Wind Turbines; Technical Report; University of Pisa: Pisa, Italy, 2014. [Google Scholar]
- Fechner, U.; van der Vlugt, R.; Schreuder, E.; Schmehl, R. Dynamic model of a pumping kite power system. Renew. Energy 2015, 83, 705–716. [Google Scholar] [CrossRef] [Green Version]
- Fagiano, L.; Nguyen-Van, S.S. Linear Take-Off and Landing of a Rigid Aircraft for Airborne Wind Energy Extraction. In Airborne Wind Energy. Ser. Green energy Technol; Springer: Delft, The Netherlands, 2018. [Google Scholar] [CrossRef]
- Bartlett, G.E.; Vidal, R.J. Experimental Investigation of Influence of Edge Shape on the Aerodynamic Characteristics of Low Aspect Ratio Wings at Low Speeds. J. Aernautical Sci. 1955, 22, 517–533. [Google Scholar] [CrossRef]
- Gursul, I. Recent developments in delta wing aerodynamics. Aeronaut. J. 2004, 108, 437–452. [Google Scholar] [CrossRef]
- Gray, J.M.; Gursul, I.; Butler, R. Aeroelastic Response of a Flexible Delta Wing Due to Unsteady Vortex Flows. In Proceedings of the 41st Aerospace Sciences Meeting and Exhibit, AIAA 2003, Stanford, CA, USA, 6–9 January 2003; p. 1106. [Google Scholar]
- Gordnier, R.E.; Visbal, M.R. Computation of the aeroelastic response of a flexible delta wing at high angles of attack. J. Fluid Struct. 2004, 19, 785–800. [Google Scholar] [CrossRef]
- Katz, J.; Plotkin, A. Low-Speed Aerodynamics, 2nd ed.; Cambridge University Press: Cambridge, UK, 2001; p. 629. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Value |
|---|---|
| Mass | 2 kg |
| 0.72 kg m | |
| 0.09 kg m | |
| 0.81 kg m | |
| Surface (S) | 1.86 m |
| Span (b) | 3.60 m |
| Chord (c) | 0.59 m |
| m | |
| m | |
| 1 m | |
| Tether length | 39.28 m |
| Tether frontal surface () | 0.08 m |
| Tether drag coeff. () | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Castro-Fernández, I.; Borobia-Moreno, R.; Cavallaro, R.; Sánchez-Arriaga, G. Three-Dimensional Unsteady Aerodynamic Analysis of a Rigid-Framed Delta Kite Applied to Airborne Wind Energy. Energies 2021, 14, 8080. https://doi.org/10.3390/en14238080
Castro-Fernández I, Borobia-Moreno R, Cavallaro R, Sánchez-Arriaga G. Three-Dimensional Unsteady Aerodynamic Analysis of a Rigid-Framed Delta Kite Applied to Airborne Wind Energy. Energies. 2021; 14(23):8080. https://doi.org/10.3390/en14238080
Chicago/Turabian StyleCastro-Fernández, Iván, Ricardo Borobia-Moreno, Rauno Cavallaro, and Gonzalo Sánchez-Arriaga. 2021. "Three-Dimensional Unsteady Aerodynamic Analysis of a Rigid-Framed Delta Kite Applied to Airborne Wind Energy" Energies 14, no. 23: 8080. https://doi.org/10.3390/en14238080
APA StyleCastro-Fernández, I., Borobia-Moreno, R., Cavallaro, R., & Sánchez-Arriaga, G. (2021). Three-Dimensional Unsteady Aerodynamic Analysis of a Rigid-Framed Delta Kite Applied to Airborne Wind Energy. Energies, 14(23), 8080. https://doi.org/10.3390/en14238080