
Development of Transport for Disabled People on the Example of Wheelchair Propulsion with Cam-Thread Drive

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Methods
3. Results
3.1. Field Tests
- Energy expenditure was greater when driving with the WCD on a tarmac surface, but the driving resistance decreased on a smooth and flat stoneware (stone) surfaces;
- The long cable wrapping distance in the WCD had a positive effect on the use of a longer wheel distance in a single propelling movement, compared with the WPD (at the beginning of the movement, a larger gear ratio allows a smoother start with less load; at the end of the movement, when the cables are pulled out, the ratio is smaller, which enables the achievement of a higher driving speed while maintaining driving comfort);
- Cams in the WCD changed the transmission ratio by approximately 1.5× and reduced the forces applied in the cables for propulsion; further measures should take into account the change in gear and wheel diameters, and ratios of the cam drive;
- The WCD caused an unfavorable shift towards the center of gravity of the man–wheelchair system with the cables extended and the upper limbs in a horizontal position, which made it difficult to travel faster and over uneven ground.
3.2. Stationary Test-Bed Tests
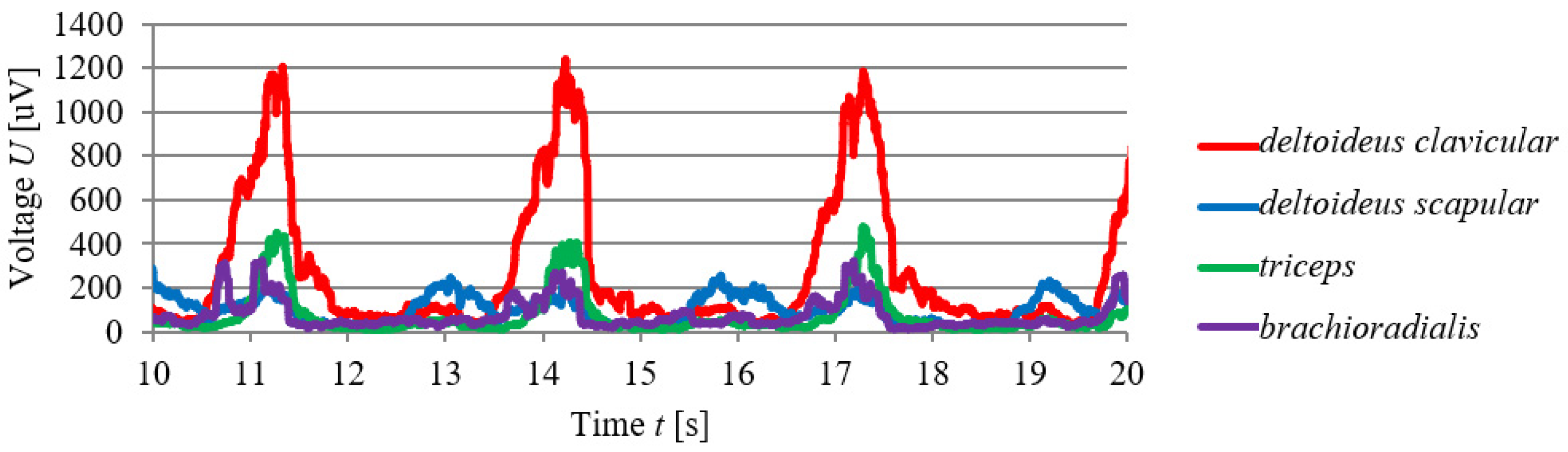
- There is a clear difference in the nature of wheelchair propulsion between WCD and WPD. These are expressed by the differences in the length of the stretch over which the propulsion occurs, the recorded values of the muscle electrical voltage U and the different activities observed over time for the individual muscles;
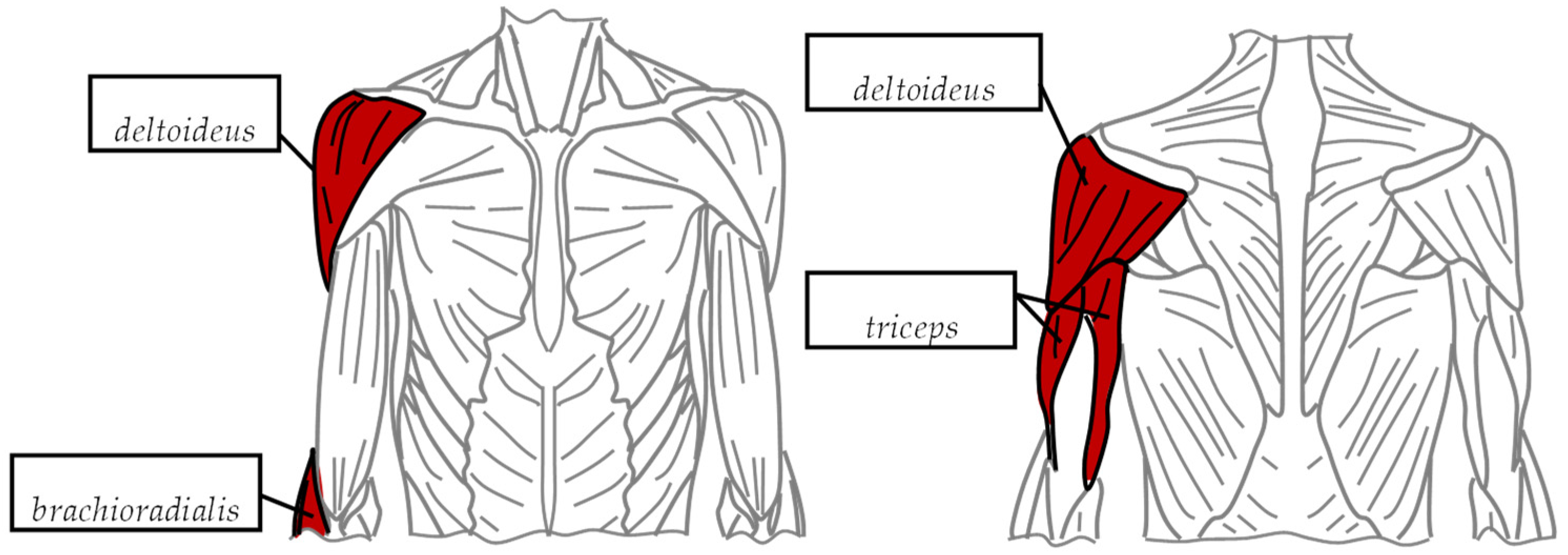
- High electrical voltage U values were recorded in the anterior part of the anterior deltoideus muscle during wheelchair propulsion with WCD; these values were significantly lower in the other muscles. In WPD, significant muscle voltage values were generated in both the entire deltoideus and triceps muscles. In WPD, the deltoideus scapular muscle generated U voltages similar to those of the deltoideus clavicular muscle. High voltage values in the deltoideus scapular muscle are not typical of WPD and are most likely due to the propulsion technique of the able-bodied tester. The brachioradialis muscle exhibited significantly less activity in total for both WCD and WPD;
- The successive propulsion phases of the wheelchair with WCD were performed less frequently (3.0–3.5 s) than in the wheelchair with WPD (2.0 s), and covered a larger circular distance (longer distance travelled): approximately ½ of the circumference of the wheel for WCD and ¼ of the circumference for WPD;
- The maximum values of muscle voltages for the wheelchair with WCD were higher by about 30% than for the wheelchair with WPD, but about 50% lower in the triceps,
- The four analyzed muscles activated simultaneously, and their activity significantly faded away in the return movement; this fade-away period in muscle activity was shorter in the WPD wheelchairs.
3.3. Analysis Using the AnyBody Modelling System
- The deltoideus scapular muscle received the most load, for both WCD and WPD. This was evidenced by both the previous EMG studies (Figure 6 and Figure 7) and the analysis of this study (Figure 11). Especially in the WCD movement, the muscle force F decreases (from about 350 N to about 100 N) as the arm straightens. The obtained final value was more than three times lower than the initial one for the WCD and about two times lower for the WPD (F ≈ 50 N). At the same time, the final muscle force value was comparable for both types of drives.
- For the deltoideus scapular muscle, the initial forces for WCD (F < 150 N) were also approximately three times greater than the forces used to propel the WPD. The forces in the muscle decreased as the movement continued, to a value of approximately F ≈ 100 N.
- The forces F in the triceps (LH, ME and LA) at the beginning of the propelling movement were about two times greater for WCD than for WPD and they evened out at the end of the movement. For WPD, at the beginning of the movement, the sum of the LH, ME and LA values in the triceps created forces greater in the deltoideus clavicular muscle. With WCD, the force in the muscle only appeared after about ⅓ of the entire propulsive movement.
- For the brachioradialis muscle, clear activity was only visible for WCD, although the previously described EMG studies indicated that activity in this muscle was evident in both drives.
4. Discussion
5. Conclusions
- A wheelchair with WCD can be used both as a vehicle and as a rehabilitation device. The propulsive movement of the upper limb can be changed with respect to its direction, and different ‘sets’ of muscles can be used for propulsion, to a much wider extent than is the case in wheelchairs with WPD. This is confirmed by the results of EMG studies and simulations with biomechanical software. Cam-shape options in a WCD wheelchair provide for a wide array of upper limb loading options individually adapted to the user;
- Propulsion of a wheelchair with WCD requires less effort from the user. This drive succeeds in reducing the dynamic forces occurring in the initial and final phases of the propulsion cycle. The active phase of the WCD drive cycle is long, which is advantageous;
- The results of the research and analysis of the wheelchair prototype indicate the need for design changes that would favor smoother propulsive movements and controlled braking. Such solutions are envisaged in the target design;
- Potential WCD disadvantages, hindering its use as a vehicle, include the rapid fatigue of the upper limbs held in the raised position (if propulsion is performed solely by pulling the cords forward, i.e., by straightening the upper limbs in the horizontal position), poor maneuverability and the necessity to use brakes, which increases both the structural complexity and weight of the wheelchair.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kager, R.; Bertolini, L.; Te Brömmelstroet, M. Characterisation of and Reflections on the Synergy of Bicycles and Public Transport. Transp. Res. Part A Policy Pract. 2016, 85, 208–219. [Google Scholar] [CrossRef] [Green Version]
- Wieczorek, B.; Warguła, Ł.; Rybarczyk, D. Impact of a Hybrid Assisted Wheelchair Propulsion System on Motion Kinematics during Climbing up a Slope. Appl. Sci. 2020, 10, 1025. [Google Scholar] [CrossRef] [Green Version]
- Holla, J.F.M.; van den Akker, L.E.; Dadema, T.; de Groot, S.; Tieland, M.; Weijs, P.J.M.; Deutekom, M.; on behalf of the WHEELS-study group. Determinants of Dietary Behaviour in Wheelchair Users with Spinal Cord Injury or Lower Limb Amputation: Perspectives of Rehabilitation Professionals and Wheelchair Users. PLoS ONE 2020, 15, e0228465. [Google Scholar] [CrossRef] [Green Version]
- Warguła, Ł.; Kukla, M.; Wieczorek, B. The Impact of Wheelchairs Driving Support Systems on the Rolling Resistance Coefficient. IOP Conf. Ser. Mater. Sci. Eng. 2020, 776, 012076. [Google Scholar] [CrossRef]
- Cooper, R.A. Wheelchair Selection and Configuration; Demos: New York, NY, USA, 1998; ISBN 978-1-888799-18-7. [Google Scholar]
- Sydor, M. Wybór i Eksploatacja Wózka Inwalidzkiego/Selection and Using a Wheelchair; Wydawnictwo Akademii Rolniczej im Augusta Cieszkowskiego: Poznań, Poland, 2003; ISBN 83-7160-315-0. [Google Scholar]
- Sydor, M.; Zabłocki, M. Wybrane problemy doboru i konfiguracji wózka inwalidzkiego z napędem ręcznym/Chosen problems of manual wheelchair selection and configuration. Fizjoter. Pol. 2006, 2, 172–177. [Google Scholar]
- Cooper, R.A.; Koontz, A.M.; Ding, D.; Kelleher, A.; Rice, I.; Cooper, R. Manual Wheeled Mobility—Current and Future Developments from the Human Engineering Research Laboratories. Disabil. Rehabil. 2010, 32, 2210–2221. [Google Scholar] [CrossRef]
- Branowski, B.; Zabłocki, M. Poszukiwanie potrzeby i koncepcji rynkowej innowacji projektowej wspomagającej mobilność seniorów i osób z niepełnosprawnościami/Searching for the need and the market concept of design innovation supporting the mobility of seniors and people with disabilities. In Projektowanie dla Seniorów i Osób Niepełnosprawnych. Badania. Analizy. Oceny. Konstrukcje; Branowski, B., Ed.; Wydział Maszyn Roboczych i Transportu Politechniki Poznańskiej: Poznań, Poland, 2015; pp. 108–122. ISBN 978-83-941828-0-9. [Google Scholar]
- Sydor, M.; Janicki, S. Wózki dla osób niepełnosprawnych/Wheeled vehicles for people with disabilities. In Wyroby Medyczne. Zaopatrzenie Indywidualne; Geremek, K., Janicki, S., Przeździak, B., Woźniewski, M., Eds.; Wydawnictwo Lekarskie PZWL: Warsaw, Poland, 2016; pp. 179–210. ISBN 978-83-200-5151-3. [Google Scholar]
- Chow, J.W.; Levy, C.E. Wheelchair Propulsion Biomechanics and Wheelers’ Quality of Life: An Exploratory Review. Disabil. Rehabil. Assist. Technol. 2011, 6, 365–377. [Google Scholar] [CrossRef]
- McLaurin, C.A.; Brubaker, C.E. Biomechanics and the Wheelchair. Prosthet. Orthot. Int. 1991, 15, 24–37. [Google Scholar] [CrossRef] [Green Version]
- Hosseini, S.M.; Oyster, M.L.; Kirby, R.L.; Harrington, A.L.; Boninger, M.L. Manual Wheelchair Skills Capacity Predicts Quality of Life and Community Integration in Persons with Spinal Cord Injury. Arch. Phys. Med. Rehabil. 2012, 93, 2237–2243. [Google Scholar] [CrossRef]
- Hiremath, S.V.; Intille, S.S.; Kelleher, A.; Cooper, R.A.; Ding, D. Detection of Physical Activities Using a Physical Activity Monitor System for Wheelchair Users. Med. Eng. Phys. 2015, 37, 68–76. [Google Scholar] [CrossRef]
- Cratsenberg, K.A.; Deitrick, C.E.; Harrington, T.K.; Kopecky, N.R.; Matthews, B.D.; Ott, L.M.; Coeytaux, R.R. Effectiveness of Exercise Programs for Management of Shoulder Pain in Manual Wheelchair Users With Spinal Cord Injury. J. Neurol. Phys. Ther. 2015, 39, 197–203. [Google Scholar] [CrossRef] [PubMed]
- Mikołajewska, E. Wheelchair-Related Falls—A Review. Int. J. Disabil. Hum. Dev. 2013, 12, 259–266. [Google Scholar] [CrossRef]
- Sydor, M.; Krauss, A.; Krauss, H. Risk Analysis for Operating Active Wheelchairs in Non-Urban Settings. Ann. Agric. Environ. Med. 2017, 24, 532–536. [Google Scholar] [CrossRef]
- Flemmer, C.L.; Flemmer, R.C. A Review of Manual Wheelchairs. Disabil. Rehabil. Assist. Technol. 2016, 11, 177–187. [Google Scholar] [CrossRef]
- Jung, H.S.; Park, G.; Kim, Y.-S.; Jung, H.-S. Development and Evaluation of One-Hand Drivable Manual Wheelchair Device for Hemiplegic Patients. Appl. Ergon. 2015, 48, 11–21. [Google Scholar] [CrossRef]
- Howarth, S.J.; Pronovost, L.M.; Polgar, J.M.; Dickerson, C.R.; Callaghan, J.P. Use of a Geared Wheelchair Wheel to Reduce Propulsive Muscular Demand during Ramp Ascent: Analysis of Muscle Activation and Kinematics. Clin. Biomech. 2010, 25, 21–28. [Google Scholar] [CrossRef] [PubMed]
- Nishavithri, N.; Dheepa, B.; Nithya, R.; Manoharan, S. Vehicle for Physically Challenged Person Using Tumbler Gear. Eur. J. Mol. Clin. Med. 2020, 7, 2509–2513. [Google Scholar]
- Sarraj, A.R.; Massarelli, R. Design History and Advantages of a New Lever-Propelled Wheelchair Prototype. Int. J. Adv. Robot. Syst. 2011, 8, 26. [Google Scholar] [CrossRef]
- Bochnacki, A.; Gwiazdowski. Patent Application PL 347277 A1. Mechanizm Kroczący/Walking Mechanism. Filled 2001.04.24, published 2002.11.04, discontinued 2010.01.29 by Polish Patent Office.
- Quaglia, G.; Bonisoli, E.; Cavallone, P. The Design of a New Manual Wheelchair for Sport. Machines 2019, 7, 31. [Google Scholar] [CrossRef] [Green Version]
- Cavallone, P.; Bonisoli, E.; Quaglia, G. Handwheelchair.q: New Prototype of Manual Wheelchair for Everyday Life. In Advances in Italian Mechanism Science; Niola, V., Gasparetto, A., Eds.; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2021; Volume 91, pp. 111–119. ISBN 978-3-030-55806-2. [Google Scholar]
- Branowski, B.; Kurczewski, P.; Torzyński, D.; Zabłocki, M. Patent Application PL 427338 A1. Napęd Ręczny Dla Pojazdów, w Szczególności Wózków Inwalidzkich Ręcznych/Manual Drive for Vehicles, in Particular for Manual Wheelchairs. Filled 2018.10.05, published 2020.04.06, granted 2021.11.29 as a patent Pat.239349 by Polish Patent Office.
- Gedliczka, A.; Pochopień, P. Atlas Miar Człowieka: Dane do Projektowania i Oceny Ergonomicznej: Antropometria, Biomechanika, Przestrzeń Pracy, Wymiary Bezpieczeństwa/Atlas of Human Measures: Data for Ergonomic Design and Assessment: Anthropometry, Biomechanics, Work Space, Safety Dimensions; Centralny Instytut Ochrony Pracy: Warsaw, Poland, 2001; ISBN 978-83-88703-38-6. [Google Scholar]
- Rankin, J.W.; Richter, W.M.; Neptune, R.R. Individual Muscle Contributions to Push and Recovery Subtasks during Wheelchair Propulsion. J. Biomech. 2011, 44, 1246–1252. [Google Scholar] [CrossRef] [Green Version]
- Wieczorek, B.; Kukla, M. Biomechanical Relationships Between Manual Wheelchair Steering and the Position of the Human Body’s Center of Gravity. J. Biomech. Eng. 2020, 142, 081006. [Google Scholar] [CrossRef] [PubMed]
- Wieczorek, B.; Kukla, M.; Warguła, Ł. The Symmetric Nature of the Position Distribution of the Human Body Center of Gravity during Propelling Manual Wheelchairs with Innovative Propulsion Systems. Symmetry 2021, 13, 154. [Google Scholar] [CrossRef]
- Van der Slikke, R.; Berger, M.; Bregman, D.; Veeger, D. Push Characteristics in Wheelchair Court Sport Sprinting. Procedia Eng. 2016, 147, 730–734. [Google Scholar] [CrossRef]
- Kukla, M.; Wieczorek, B.; Warguła, Ł.; Berdychowski, M. An Analytical Model of the Demand for Propulsion Torque during Manual Wheelchair Propelling. Disabil. Rehabil. Assist. Technol. 2021, 16, 9–16. [Google Scholar] [CrossRef] [PubMed]
- Kloiber, M.; Drdácký, M.; Machado, J.S.; Piazza, M.; Yamaguchi, N. Prediction of Mechanical Properties by Means of Semi-Destructive Methods: A Review. Constr. Build. Mater. 2015, 101, 1215–1234. [Google Scholar] [CrossRef] [Green Version]
- Zabłocki, M.; Branowski, B.K.; Kurczewski, P.; Torzyński, D.; Bonenberg, A.; Gabryelski, J.; Głowala, S.; Pohl, P.; Rychlik, M.T.; Sydor, M.; et al. Wprowadzenie do Inżynierii Rehabilitacyjnej/Introduction to Rehabilitation Engineering; Zabłocki, M., Ed.; Wydział Maszyn Roboczych i Transportu Politechniki Poznańskiej: Poznań, Poland, 2017; ISBN 978-83-941828-1-6. [Google Scholar]
- Wieczorek, B.; Kukla, M.; Rybarczyk, D.; Warguła, Ł. Evaluation of the Biomechanical Parameters of Human-Wheelchair Systems during Ramp Climbing with the Use of a Manual Wheelchair with Anti-Rollback Devices. Appl. Sci. 2020, 10, 8757. [Google Scholar] [CrossRef]
- Boninger, M.L.; Souza, A.L.; Cooper, R.A.; Fitzgerald, S.G.; Koontz, A.M.; Fay, B.T. Propulsion Patterns and Pushrim Biomechanics in Manual Wheelchair Propulsion. Arch. Phys. Med. Rehabil. 2002, 83, 718–723. [Google Scholar] [CrossRef] [PubMed]
- Kumar, S. (Ed.) Biomechanics in Ergonomics, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2008; ISBN 978-0-8493-7908-6. [Google Scholar]
- Salvendy, G. (Ed.) Handbook of Human Factors and Ergonomics, 4th ed.; Wiley: Hoboken, NJ, USA, 2012; ISBN 978-0-470-52838-9. [Google Scholar]
- WHO Assistive Technology. Available online: https://www.who.int/news-room/fact-sheets/detail/assistive-technology (accessed on 24 September 2021).
- Branowski, B.; Zabłocki, M.; Sydor, M. The Material Indices Method in the Sustainable Engineering Design Process: A Review. Sustainability 2019, 11, 5465. [Google Scholar] [CrossRef] [Green Version]
- Sapey, B.; Stewart, J.; Donaldson, G. The Social Implications of Increases in Wheelchair Use: Report; Department of Applied Social Science, Lancaster University: Lancaster, UK, 2004; ISBN 978-1-86220-153-8. [Google Scholar]
- Sable, K. Global Manual Wheelchair Market; Allied Market Research: Portland, OR, USA, 2019; p. 222. [Google Scholar]
- Bonenberg, A.; Branowski, B.; Kurczewski, P.; Lewandowska, A.; Sydor, M.; Torzyński, D.; Zabłocki, M. Designing for Human Use: Examples of Kitchen Interiors for Persons with Disability and Elderly People. Hum. Factors Ergon. Manuf. Serv. Ind. 2019, 29, 177–186. [Google Scholar] [CrossRef]
- Branowski, B.; Pohl, P.; Rychlik, M.; Zablocki, M. Integral Model of the Area of Reaches and Forces of a Disabled Person with Dysfunction of Lower Limbs as a Tool in Virtual Assessment of Manipulation Possibilities in Selected Work Environments. In Universal Access in Human-Computer Interaction: Users Diversity, Pt 2, Proceedings of the 6th International Conference, UAHCI 2011, Orlando, FL, USA, 9–14 July 2011; Stephanidis, C., Ed.; Springer: Berlin/Heidelberg, Germany, 2011; Volume 6766, pp. 12–21. ISBN 978-3-642-21662-6. [Google Scholar]
- Branowski, B.; Pacholski, L.; Rychlik, M.; Zabłocki, M.; Pohl, P. Studies on a New Concept of 3D Data Integration about Reaches and Forces of a Disabled Person on a Wheelchair (CAD Methods in Car and Market Ergonomics). Hum. Factors Ergon. Manuf. Serv. Ind. 2013, 23, 255–266. [Google Scholar] [CrossRef]
- World Health Organization. World Report on Ageing and Health; World Health Organization: Geneva, Switzerland, 2015; ISBN 92-4-156504-7. [Google Scholar]
- Wheelchair Market; Fortune Business Insights: Pune, India, 2020; p. 145.
- Wheelchair Market by Type (Manual and Electric), by Application (Pediatric and Adults), by End-User (Homecare, Ambulatory Surgical Centers, Hospitals, Rehabilitation Centers), 2017–2027; Consumer Goods; Marketysers Global Consulting LLP: Pune, India, 2020.
- North America Wheelchair Market Size, Share & Trends Analysis Report by Application (Hospitals, Homecare, ASCs), by Product (Manual, Electric), by Category Type, by Country, and Segment Forecasts, 2021–2028; Grand View Research, Inc.: San Francisco, CA, USA, 2021; p. 100.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Surface | Tarmac | Floor Tiles | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Person/Drive Type | 1/WCD | 1/WPD | 1/WCD | 1/WCD | 1/WPD | 2/WCD | 2/WPD | 1/WCD | 2/WPD | |
| Monitored Parameters | ||||||||||
| Test duration (min) | 1.27 | 0.57 | 1.24 | 2.24 | 2.03 | 2.49 | 2.2 | 2.27 | 2.42 | |
| Distance (m) | 100 | 80 | 100 | 160 | 180 | 160 | 170 | 140 | 120 | |
| Max. speed (km/h) | 5.7 | 5.8 | 6.1 | 4.5 | 6.1 | 4.7 | 5.6 | 3.9 | 5.1 | |
| Mean speed (km/h) | 4.5 | 4.4 | 4.4 | 4.1 | 5.4 | 3.4 | 4.5 | 3.5 | 5.1 | |
| Min. heart rate (bpm) | 85 | 88 | 70 | 96 | 83 | 75 | 93 | 76 | 97 | |
| Mean heart rate (bpm) | 94 | 88 | 87 | 107 | 92 | 91 | 100 | 99 | 108 | |
| Max. heart rate (bpm) | 106 | 88 | 94 | 120 | 96 | 99 | 121 | 117 | 115 | |
| Used energy (kcal) | 7 | 6 | 6 | 17 | 11 | 15 | 14 | 14 | 19 | |
| Energy from fat (%) | 73 | 78 | 78 | 62 | 62 | 65 | 57 | 63 | 54 | |
| Height above sea level (m) | 46 | 48 | 48 | 48 | 48 | 48 | 48 | 48 | 48 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gabryelski, J.; Kurczewski, P.; Sydor, M.; Szperling, A.; Torzyński, D.; Zabłocki, M. Development of Transport for Disabled People on the Example of Wheelchair Propulsion with Cam-Thread Drive. Energies 2021, 14, 8137. https://doi.org/10.3390/en14238137
Gabryelski J, Kurczewski P, Sydor M, Szperling A, Torzyński D, Zabłocki M. Development of Transport for Disabled People on the Example of Wheelchair Propulsion with Cam-Thread Drive. Energies. 2021; 14(23):8137. https://doi.org/10.3390/en14238137
Chicago/Turabian StyleGabryelski, Jarosław, Przemysław Kurczewski, Maciej Sydor, Agnieszka Szperling, Dariusz Torzyński, and Marek Zabłocki. 2021. "Development of Transport for Disabled People on the Example of Wheelchair Propulsion with Cam-Thread Drive" Energies 14, no. 23: 8137. https://doi.org/10.3390/en14238137
APA StyleGabryelski, J., Kurczewski, P., Sydor, M., Szperling, A., Torzyński, D., & Zabłocki, M. (2021). Development of Transport for Disabled People on the Example of Wheelchair Propulsion with Cam-Thread Drive. Energies, 14(23), 8137. https://doi.org/10.3390/en14238137