
Generic Upscaling Methodology of a Floating Offshore Wind Turbine


Abstract
:1. Introduction
2. Materials and Methods
2.1. Reference Wind Turbines
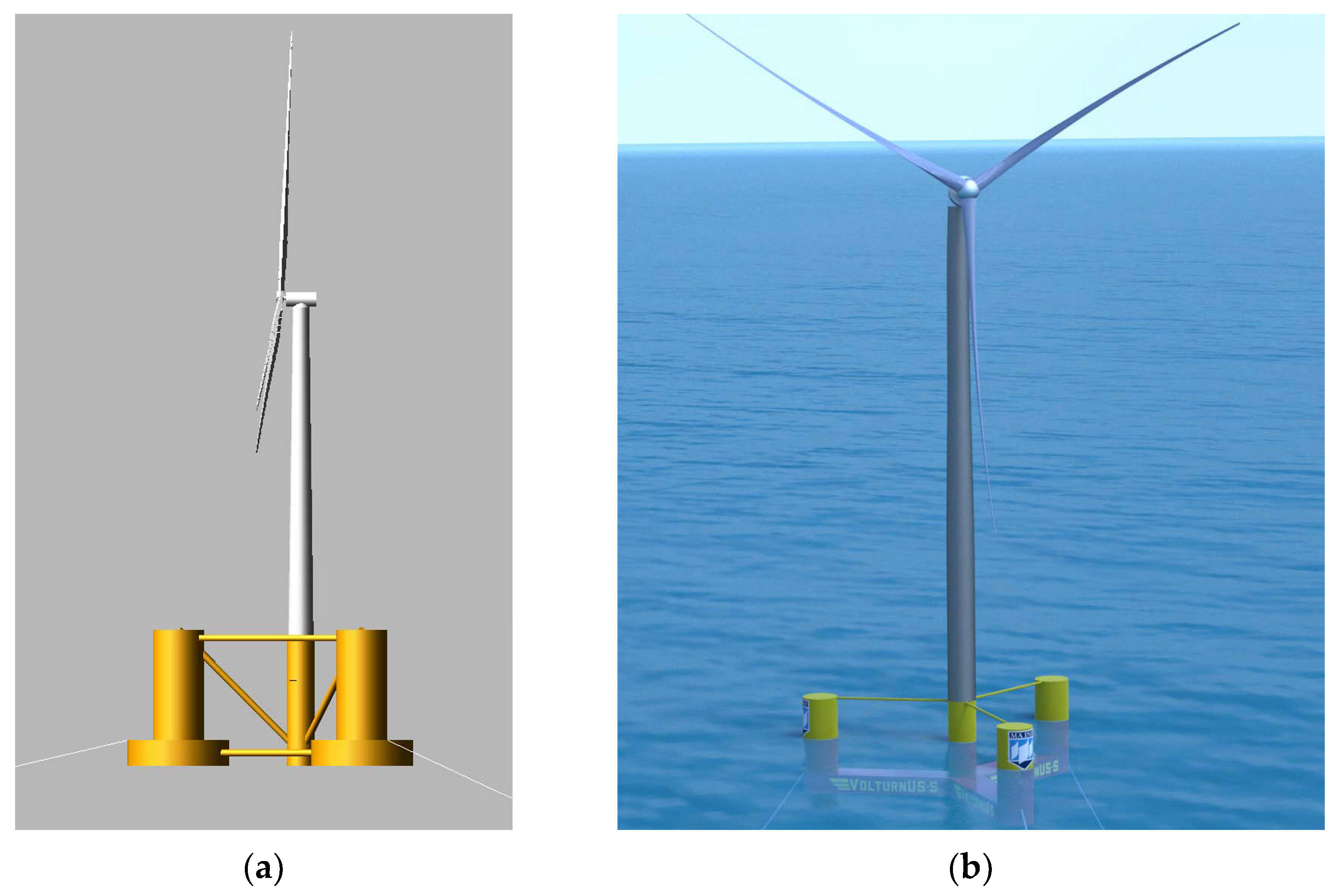
2.2. Reference Semi-Submersibles
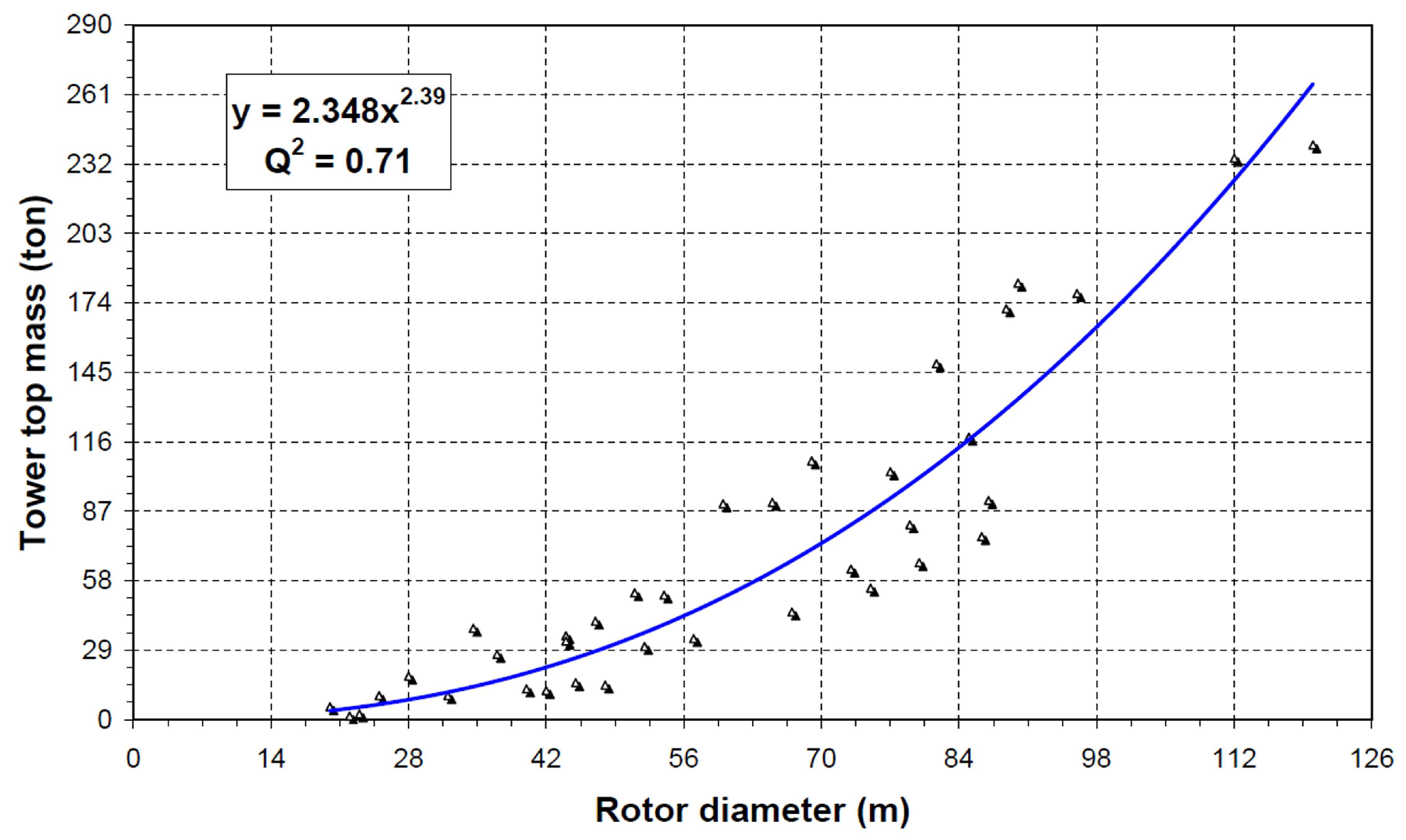
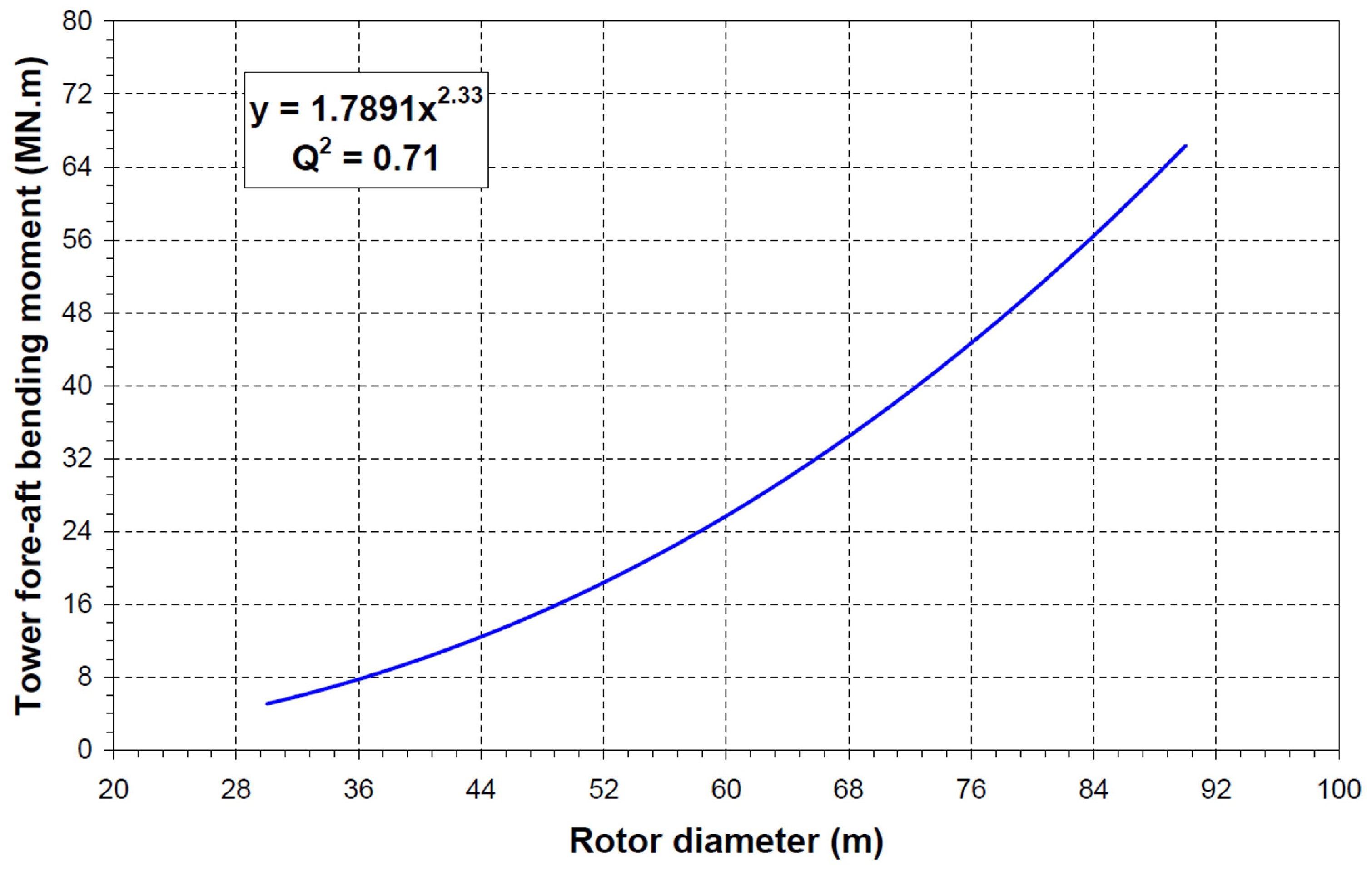
2.3. Turbine Upscaling
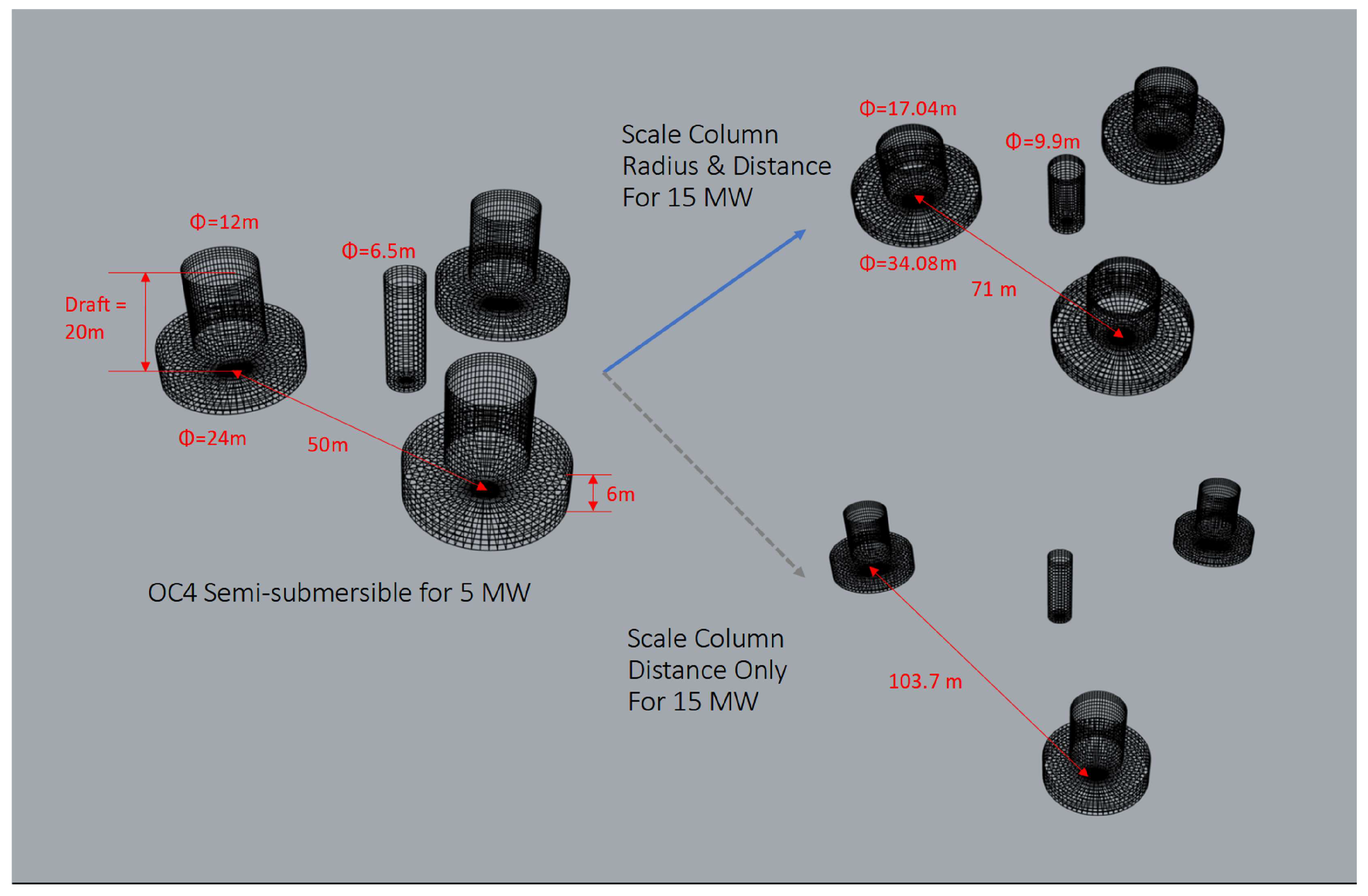
2.4. Semi-Submersible Upscaling
2.5. Estimating Parameter Scaling with Pitch Restoring Stiffness
3. Results and Discussion
3.1. Comparison between Reference and Upscaled Wind Turbines
3.2. Semi-Submersible Upscaling Trends
3.3. Comparison with UMaine Design
3.4. Parameter Scaling Estimation
4. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Laboratory: Golden, CO, USA, 2009. [Google Scholar]
- Gaertner, E.; Rinker, J.; Sethuraman, L.; Zahle, F.; Anderson, B.; Barter, G.; Abbas, N.; Meng, F.; Bortolotti, P.; Skrzypinski, W.; et al. Definition of the IEA 15-Megawatt Offshore Reference Wind Turbine; National Renewable Energy Laboratory: Golden, CO, USA, 2020. [Google Scholar]
- Robertson, A.; Jonkman, J.; Masciola, M.; Song, H.; Goupee, A.; Coulling, A.; Luan, C. Definition of the Semisubmersible Floating System for Phase II of OC4; National Renewable Energy Laboratory: Golden, CO, USA, 2014. [Google Scholar]
- Allen, C.; Viselli, A.; Dagher, H.; Goupee, A.; Gaertner, E.; Abbas, N.; Hall, M.; Barter, G. Definition of the UMaine Volturn US-S Reference Platform Developed for the IEA Wind 15-Megawatt Offshore Reference Wind Turbine; National Renewable Energy Laboratory: Golden, CO, USA, 2020. [Google Scholar]
- Musial, W.M.; Bourgeois, R.; Norton, G.; Derby, M.; Reeve, E.; Peterson, K.; Bauman, I.; Matthiesen, J.; Burke, O. Research and Development Roadmap Version 2.0; National Offshore Wind Research & Development Consortium: Stony Brook, NY, USA, 2019. [Google Scholar]
- NOWRDC. Innovation in Offshore Wind Solicitation 1.0; National Offshore Wind Research & Development Consortium: Stony Brook, NY, USA, 2020. [Google Scholar]
- Sieros, G.; Chaviaropoulos, P.; Sørensen, J.D.; Bulder, B.H.; Jamieson, P. Upscaling Wind Turbines: Theoretical and practical aspects and their impact on the cost of energy. Wind Energy 2012, 15, 3–17. [Google Scholar] [CrossRef] [Green Version]
- Leimeister, M.; Bachynski, E.; Muskulus, M.; Thomas, P. Rational upscaling of a semi-submersible floating platform supporting a wind turbine. In Energy Procedia, Proceedings of the 13th Deep Sea Offshore Wind R&D Conference, EERA DeepWind’2016, Trondheim, Norway, 20–22 January 2016; Tande, J.O.G., Kvamsdal, T., Muskulus, M., Eds.; Elsevier: Amsterdam, The Netherlands, 2016; pp. 434–442. [Google Scholar]
- George, J. WindFloat Design for Different Turbine Sizes. Master’s Thesis, Instituto Superior Técnico, Lisbon, Portugal, 2014. [Google Scholar]
- Kikuchi, Y.; Ishihara, T. Upscaling and levelized cost of energy for offshore wind turbines supported by semi-submersible floating platforms. In Journal of Physics: Conference Series, Proceedings of the 16th Deep Sea Offshore Wind R&D Conference, EERA DeepWind’2019, Trondheim, Norway, 16–18 January 2019; IOP Publishing Ltd.: Bristol, UK, 2019; p. 012033. [Google Scholar]
- Bortolotti, P.; Tarres, H.; Dykes, K.; Merz, K.; Sethuraman, L.; Verelst, D.; Zahle, F. IEA Wind Task 37 on Systems Engineering in Wind Energy WP2.1 Reference Wind Turbines; National Renewable Energy Laboratory: Golden, CO, USA, 2019. [Google Scholar]
- Bak, C.; Zahle, F.; Bitsche, R.; Kim, T.; Yde, A.; Henriksen, L.C.; Natarajan, A.; Hansen, M.H. Description of the DTU 10 MW Reference Wind Turbine; DTU Wind Energy Report-I-0092 5; DTU Wind Energy: Roskilde, Denmark, 2013. [Google Scholar]
- Jamieson, P. Loading and Cost Trends Using Certification Calculation; Internal Report; UPWIND: Roskilde, Denmark, 2007. [Google Scholar]
- Ashuri, T. Beyond Classical Upscaling: Integrated Aeroservoelastic Design and Optimization of Large Offshore Wind Turbines. Ph.D. Thesis, Sharif University of Technology, Tehran, Iran, 2012. [Google Scholar]
- Det Norske Veritas. Recommended Practice DNV-RP-C205: Environmental Conditions and Environmental Loads; Det Norske Veritas: Bærum, Norway, 2010; pp. 174–177. [Google Scholar]
- Masciola, M.; Chen, X.; Yu, Q. Evaluation of the Dynamic-Response-Based Intact Stability Criterion for Floating Wind Turbines. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering. Volume 9: Ocean Renewable Energy, St. John’s, NL, Canada, 31 May–5 June 2015; ASME: New York, NY, USA, 2015. [Google Scholar]
- Anderson, C. Wind Turbines: Theory and Practice, 1st ed.; Cambridge University Press: Cambridge, UK, 2020; pp. 64–79. [Google Scholar]
- Jang, H.K.; Park, S.; Kim, M.H.; Kim, K.H.; Hong, K. Effects of heave plates on the global performance of a MUFOWT. Renew. Energy 2019, 134, 526–537. [Google Scholar] [CrossRef]
- Kim, H.C.; Kim, M.H. Global Performances of a Semi-Submersible 5 mw Wind-Turbine Including Second-Order Wave-Diffraction Effects. Ocean Syst. Eng. 2015, 5, 139–160. [Google Scholar] [CrossRef]
- Kim, H.C.; Kim, M.H. Comparison of Simulated Platform Dynamics in Steady/Dynamic Winds and Irregular Waves for OC4 Semi-Submersible 5 mw Wind-Turbine against Deepcwind Model-Test Results. Ocean Syst. Eng. 2016, 6, 1–21. [Google Scholar] [CrossRef]
- Bae, Y.H.; Kim, M.H. Coupled dynamic analysis of multiple wind turbines on a large floater. Ocean Eng. 2014, 92, 175–187. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit | 5 MW | 15 MW | |
|---|---|---|---|
| Heave Natural Period | |||
| Estimated | [s] | 16.5 | 19.1 |
| Simulated | [s] | 17.2 1 | 20.4 2 |
| Pitch Natural Period | |||
| Estimated | [s] | 26.4 | - |
| Simulated | [s] | 27.1 1 | 27.8 2 |
| Units | NREL 5 MW | Scaled 10 MW | IEA 10 MW | Scaled 15 MW | IEA 15 MW | |
|---|---|---|---|---|---|---|
| Power Rating | 5.0 | 10 | 10.0 | 15 | 15.0 | |
| Turbine Scale Factor | 1.00 | 1.41 | - | 1.73 | - | |
| Rotor Radius | m | 63.0 | 89.10 | 99.0 | 109.12 | 120.0 |
| Blade Length | m | 61.5 | 87.0 | 96.7 | 106.5 | 116.0 |
| Hub Radius | m | 1.5 | 2.12 | 2.3 | 2.60 | 4.0 |
| Hub Height | m | 90.0 | 116.10 | 119.0 | 136.12 | 150.0 |
| Tip Speed | m/s | 80.0 | 80 | 90.0 | 80 | 95.0 |
| Tower Length | m | 77.6 | 103.70 | 115.6 | 123.72 | 144.6 |
| Tower Base Diameter | m | 6.5 | 8.48 | 9.0 | 9.90 | 10.0 |
| Tower Base Thickness | mm | 27.0 | 35.2 | 38.0 | 41.1 | 45.5 |
| Tower Top Diameter | m | 3.9 | 5.05 | 5.5 | 5.90 | 6.5 |
| Tower Top Thickness | mm | 19.0 | 24.8 | 20.0 | 29.0 | 24.0 |
| Blade Mass | t | 17.7 | 42.2 | 47.7 | 70.0 | 65.3 |
| Hub Mass | t | 56.8 | 135.0 | 81.7 | 224.2 | 190.0 |
| Nacelle Mass | t | 240 | 530 | 540 | 850 | 630 |
| Tower Mass | t | 250 | 570 | 630 | 920 | 860 |
| Total Mass | t | 600 | 1360 | 1400 | 2200 | 1880 |
| 5 MW | 10 MW | 15 MW | ||||||
|---|---|---|---|---|---|---|---|---|
| OC4 | Distance & Radius Scaling | Distance Scaling | Distance & Radius Scaling | Distance Scaling | Matching VolturnUS-S | UMaine VolturnUS-S | ||
| Turbine Scale Factor | - | 1.41 | 1.41 | 1.73 | 1.73 | 1.73 | - | |
| Platform Scale Factor | - | 1.24 | 1.57 | 1.42 | 2.07 | - | - | |
| Outer Column Distance | m | 50 | 62.05 | 78.7 | 71 | 103.7 | 89.6 | 89.6 |
| Outer Column Radius | m | 6 | 7.45 | 6.00 | 8.52 | 6.00 | 6.25 | 6.25 |
| RNA Mass | t | 350 | 790 | 790 | 1280 | 1280 | 1280 | 990 |
| RNA zCG | m | 90.0 | 113.7 | 113.7 | 133.7 | 133.7 | 133.7 | 150.0 |
| Tower Mass | t | 250 | 570 | 570 | 920 | 920 | 920 | 1260 |
| Tower zCG | m | 43.4 | 54.6 | 54.6 | 63.3 | 63.3 | 63.3 | 56.5 |
| Turbine Mass | t | 600 | 1360 | 1360 | 2200 | 2200 | 2200 | 2250 |
| Metal Mass | t | 3850 | 5250 | 4140 | 6370 | 4360 | 4450 | 4010 |
| Ballast Mass | t | 9620 | 15,070 | 9290 | 19,870 | 8930 | 9780 | 13,840 |
| Platform Mass | t | 13,470 | 20,320 | 13,430 | 26,240 | 13,290 | 14,240 | 17,840 |
| Platform zCG | m | −13.46 | −13.79 | −13.56 | −13.91 | −13.55 | −13.69 | −14.94 |
| Platform zCB | m | −13.15 | −13.16 | −13.13 | −13.15 | −13.09 | −13.08 | −13.63 |
| Total Mass | t | 14,340 | 21,950 | 15,060 | 28,720 | 15,770 | 16,720 | 20,090 |
| Total zCG | m | −9.89 | −7.49 | −4.40 | −4.89 | 2.83 | 1.77 | −2.32 1 |
| GM | m | 7.45 | 10.37 | 15.43 | 12.75 | 24.05 | 15.73 | 15.6 1 |
| Heave Natural Period | s | 17.2 | 17.3 | 16.3 | 17.9 | 16.2 | 16.3 | 20.4 |
| Pitch Natural Period | s | 27.1 | 27.4 | 24.2 | 28.3 | 23.6 | 26.4 | 27.8 |
| Heave Restoring Stiffness | N/m | 3.82 × 106 | 5.91 × 106 | 4.08 × 106 | 7.74 × 106 | 4.32 × 106 | 4.59 × 106 | 4.49 × 106 1 |
| Pitch Restoring Stiffness | Nm/rad | 1.05 × 109 | 2.23 × 109 | 2.28 × 109 | 3.59 × 109 | 3.72 × 109 | 2.58 × 109 | 2.65 × 109 1 |
| Max Static Pitch Angle | deg | 6.00 | 6.26 | 6.14 | 6.21 | 5.99 | 8.64 | 8.41 1 |
| Distance Scaling | Distance & Radius Scaling | Radius Scaling | |
|---|---|---|---|
| As function of semi-submersible scale factor | |||
| Estimated | 0.119 | 1.515 | 1.490 |
| Regression | 0.158 | 1.413 | - |
| As function of pitch restoring stiffness | |||
| Estimated | 0.065 | 0.424 | 0.784 |
| Neglecting zCB − zCG | 0.059 | 0.372 | 0.745 |
| Regression | 0.092 | 0.404 | - |
| As function of turbine scale factor | |||
| Estimated | 0.150 | 0.975 | 1.803 |
| Neglecting zCB − zCG | 0.136 | 0.856 | 1.714 |
| Regression | 0.212 | 0.929 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Kim, M.-H. Generic Upscaling Methodology of a Floating Offshore Wind Turbine. Energies 2021, 14, 8490. https://doi.org/10.3390/en14248490
Wu J, Kim M-H. Generic Upscaling Methodology of a Floating Offshore Wind Turbine. Energies. 2021; 14(24):8490. https://doi.org/10.3390/en14248490
Chicago/Turabian StyleWu, Jeffrey, and Moo-Hyun Kim. 2021. "Generic Upscaling Methodology of a Floating Offshore Wind Turbine" Energies 14, no. 24: 8490. https://doi.org/10.3390/en14248490
APA StyleWu, J., & Kim, M. -H. (2021). Generic Upscaling Methodology of a Floating Offshore Wind Turbine. Energies, 14(24), 8490. https://doi.org/10.3390/en14248490