
Analysis of the Results from In Situ Testing of a Sensor In-Stalled on a Powered Roof Support, Developed by KOMAG, Measuring the Tip to Face Distance

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
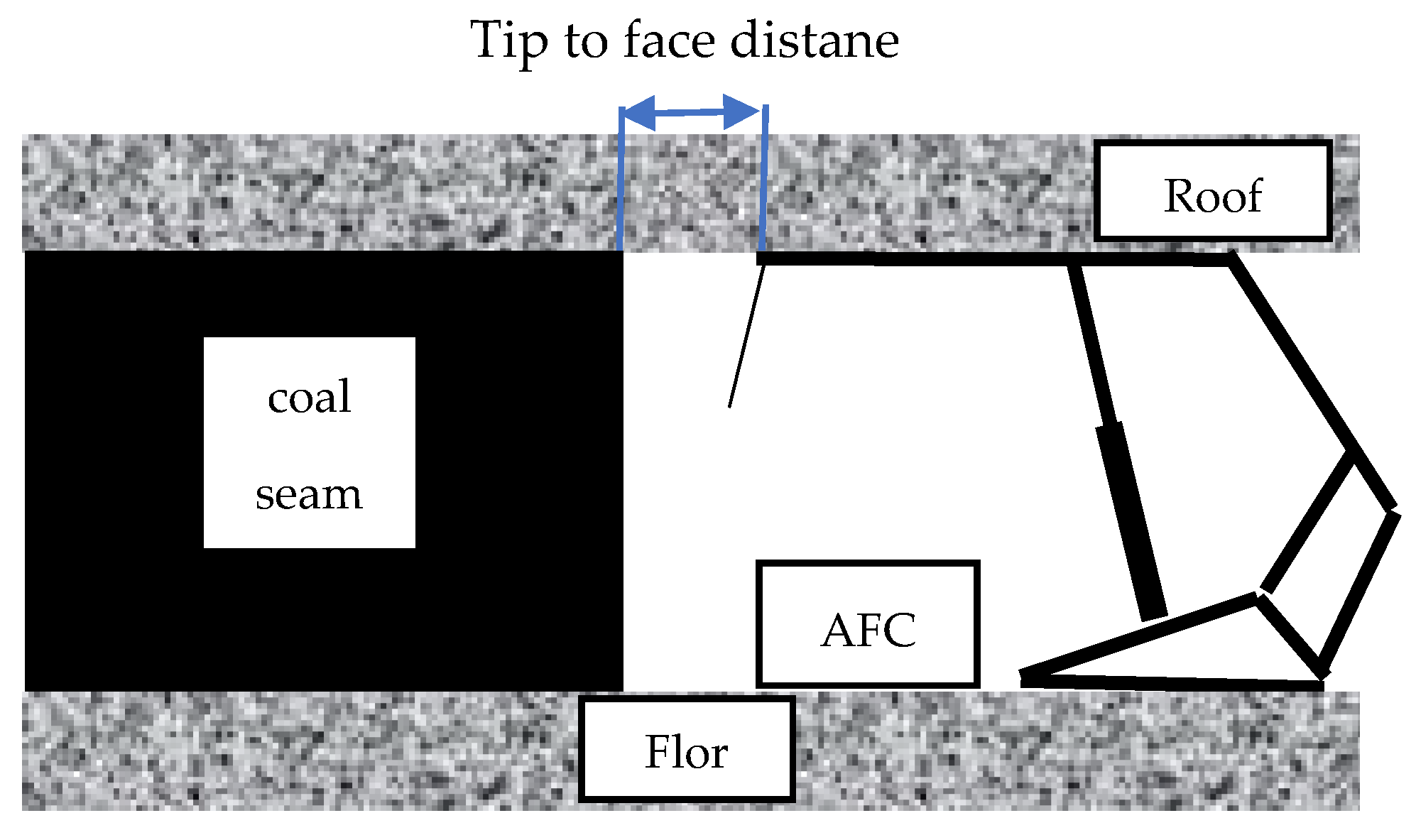
2.1. Tip to Face Distance
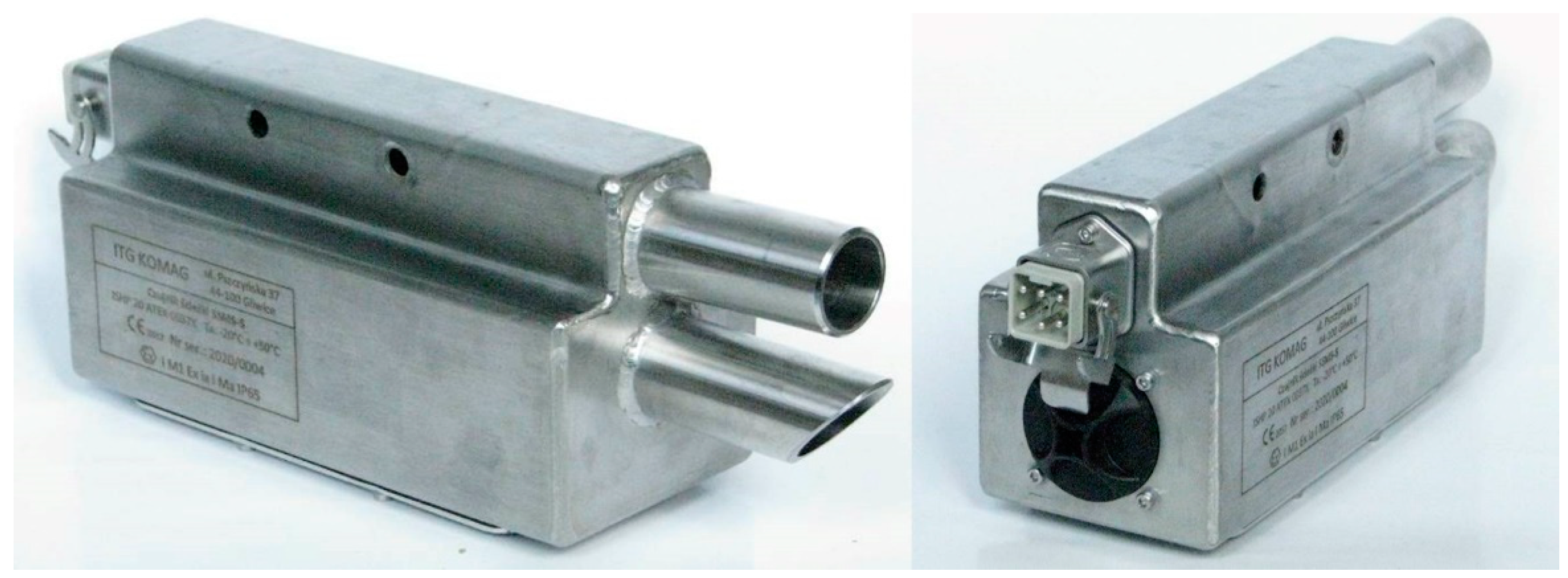
2.2. Tip to Face Distance Sensor SSMS-S
2.3. Field Test of SMMS at JSW Pniówek Mine
2.4. Field Test of SMMS at JSW Budryk Mine
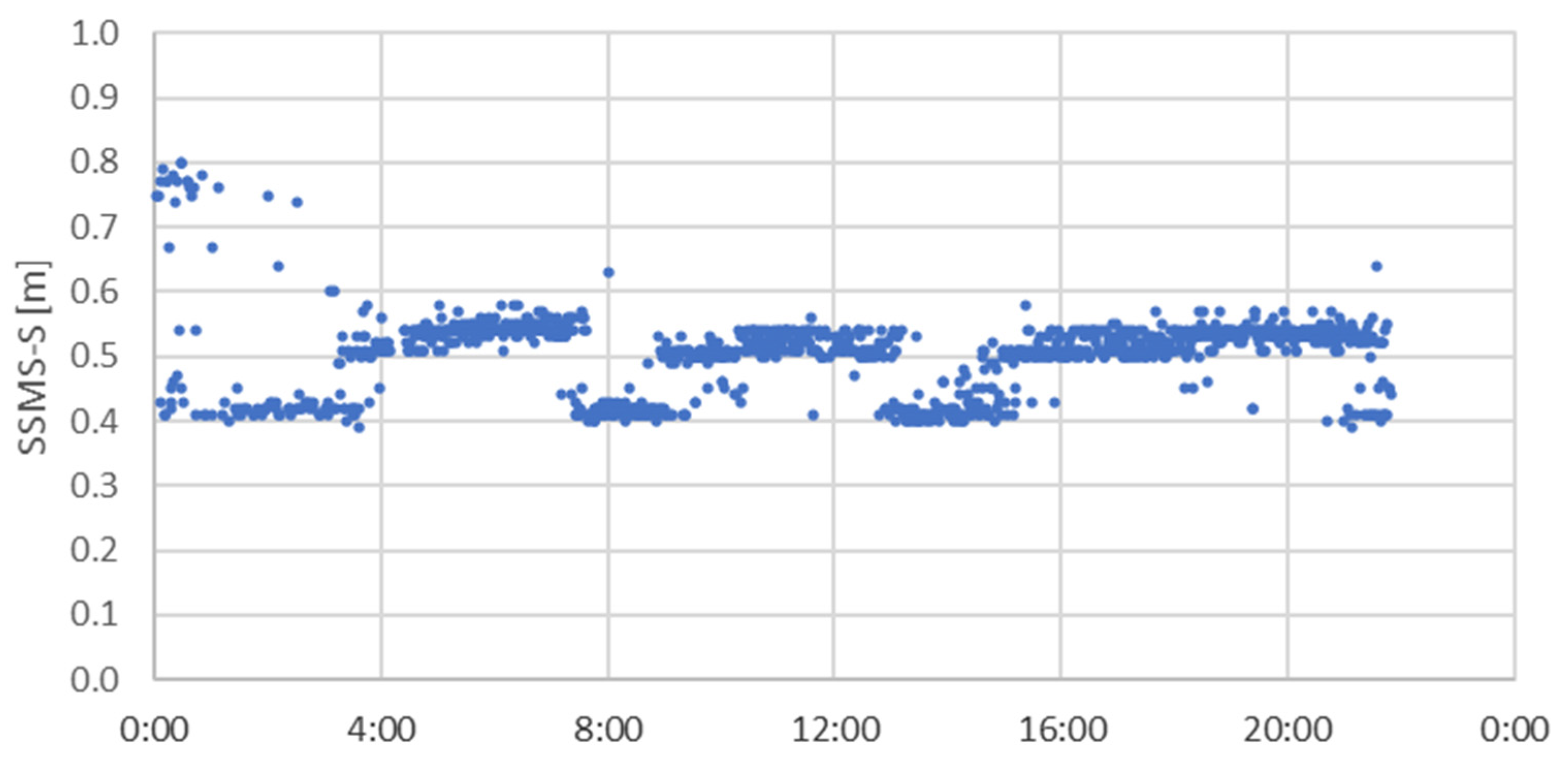
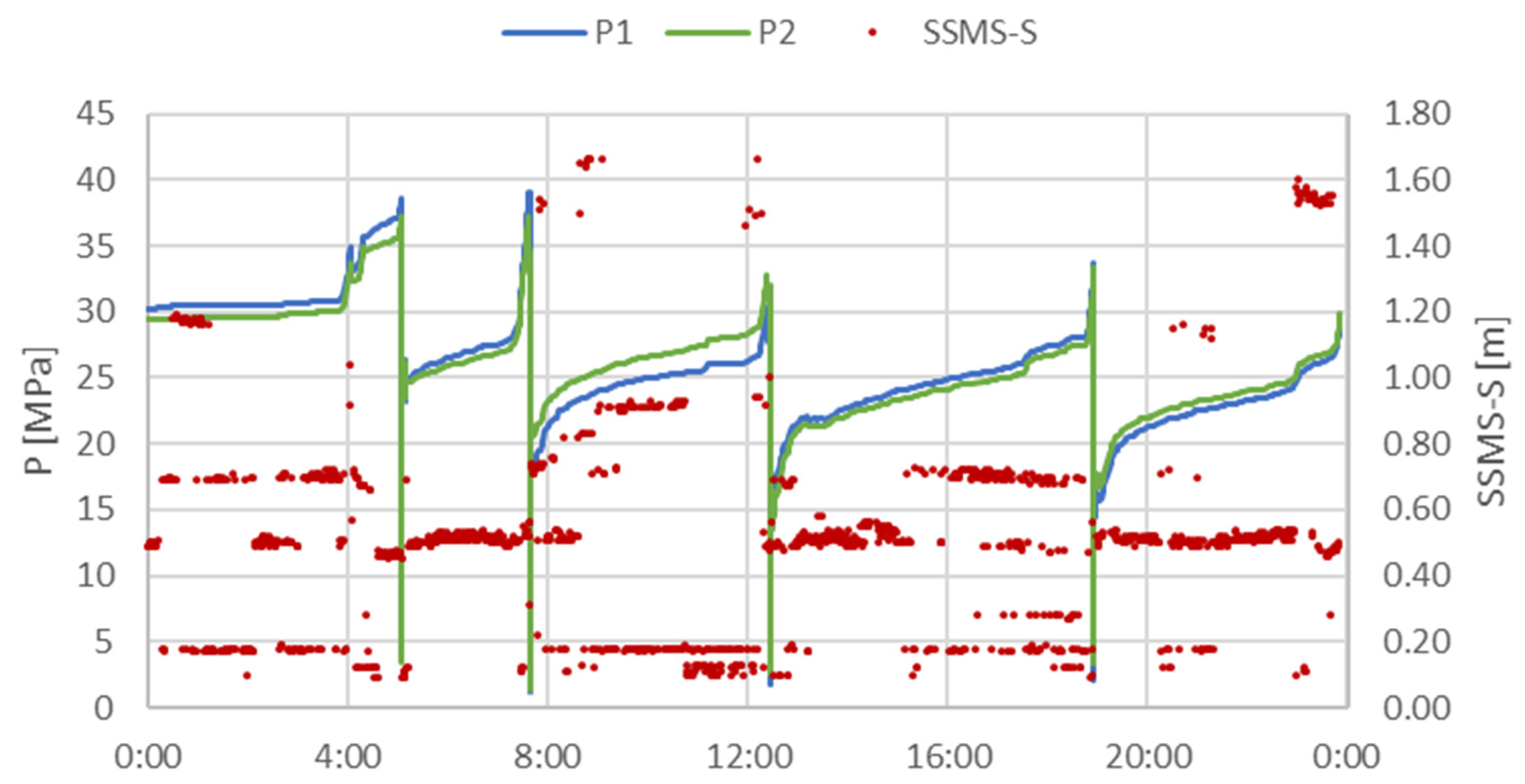
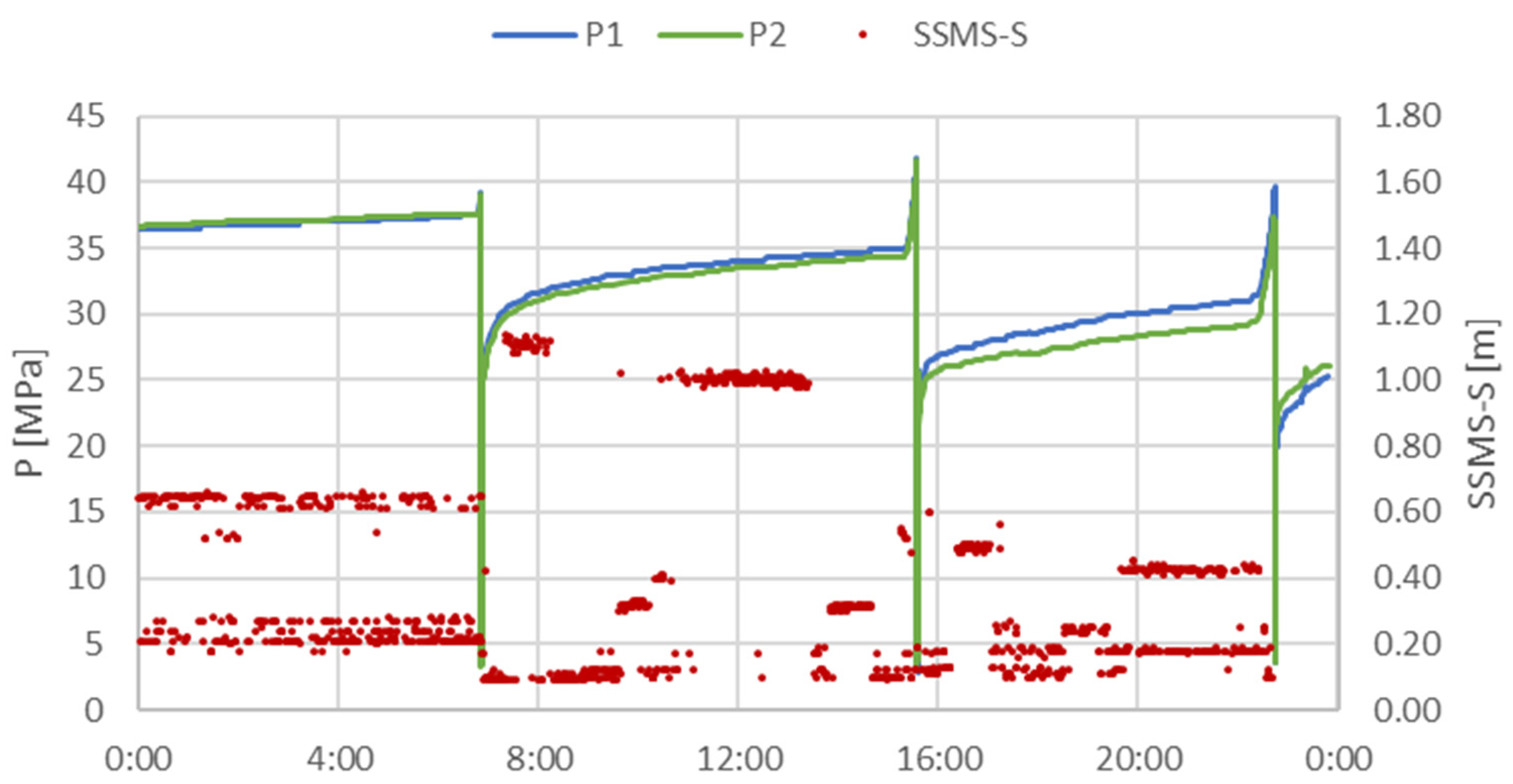
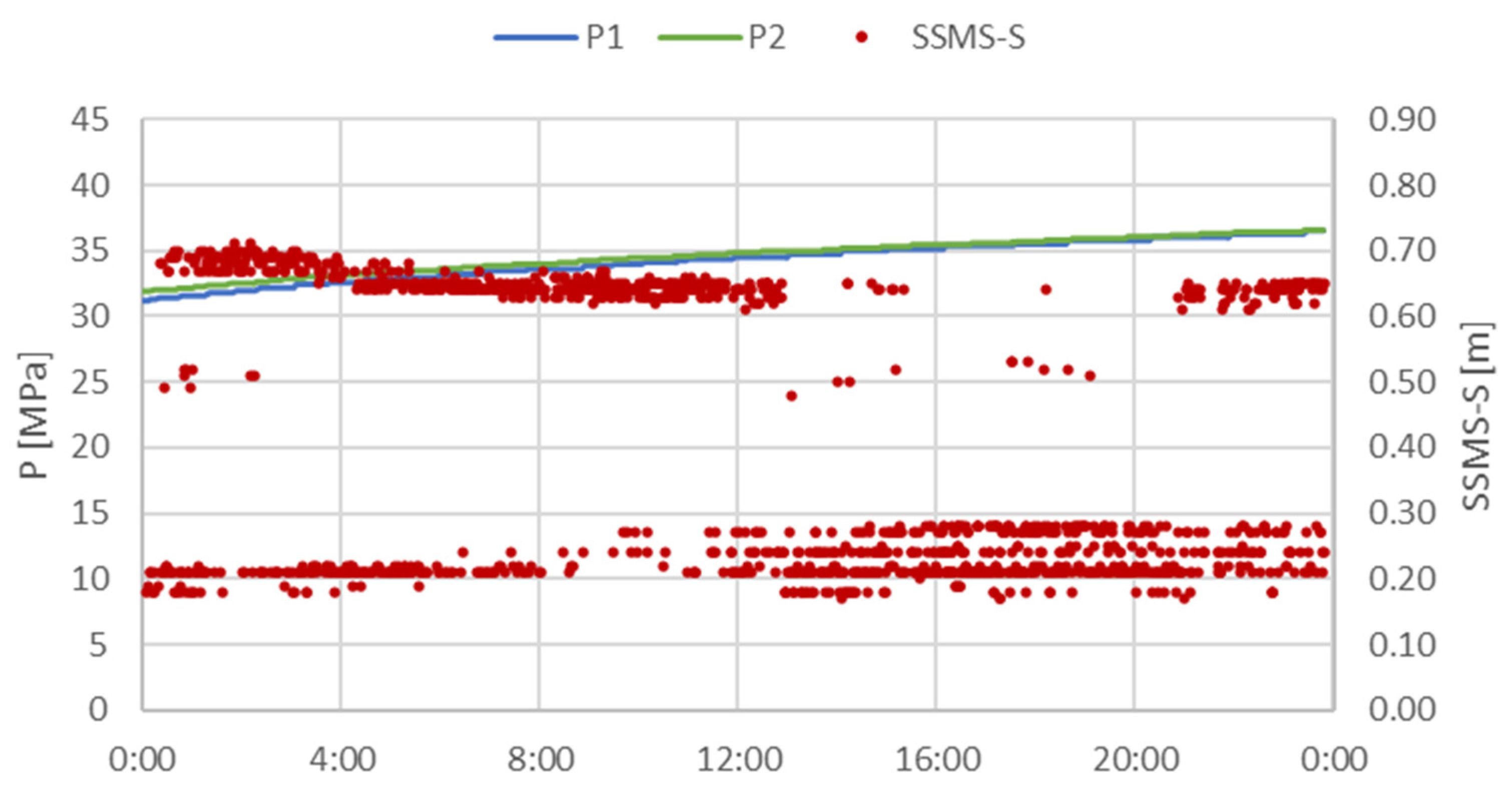
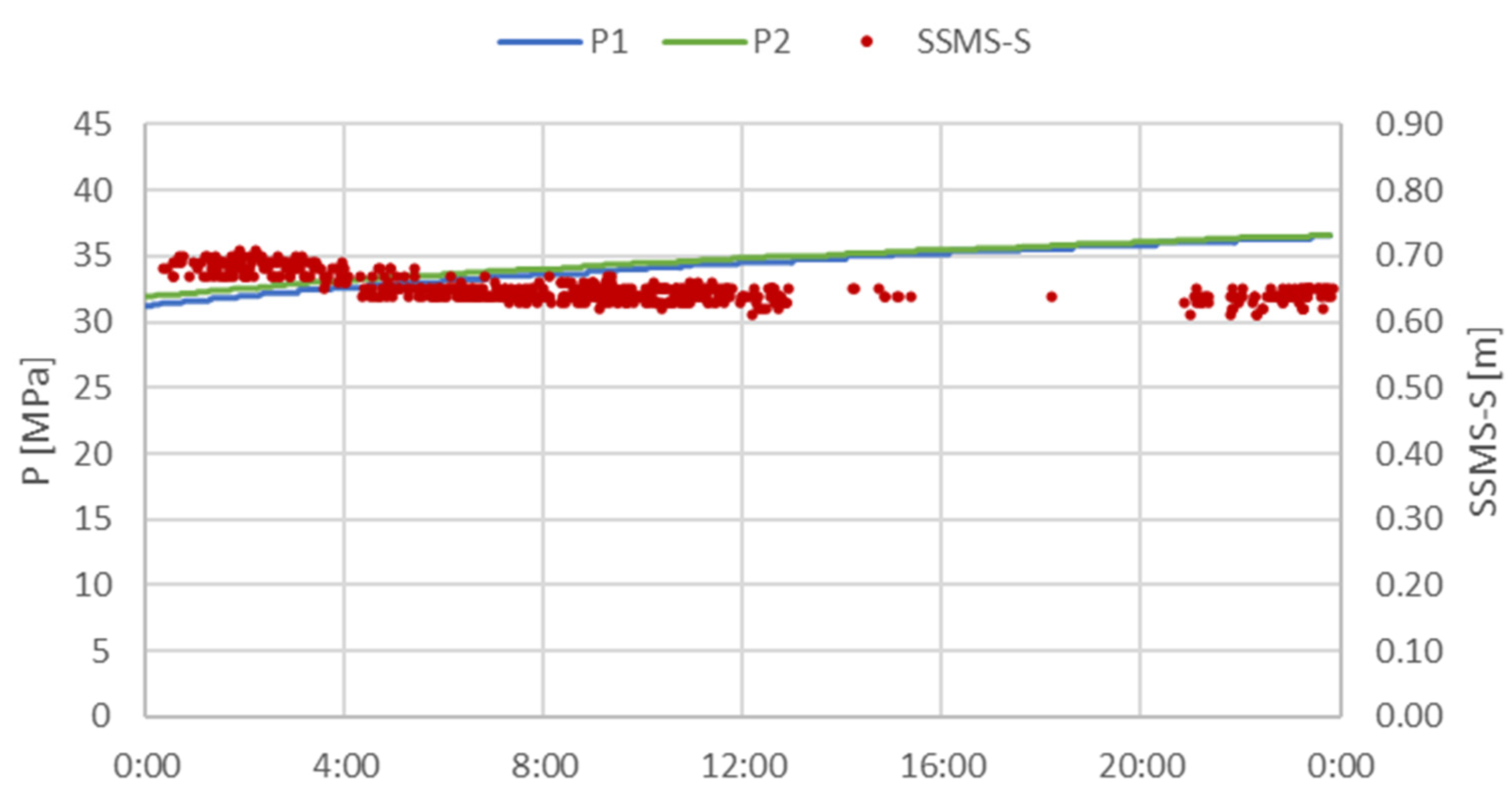
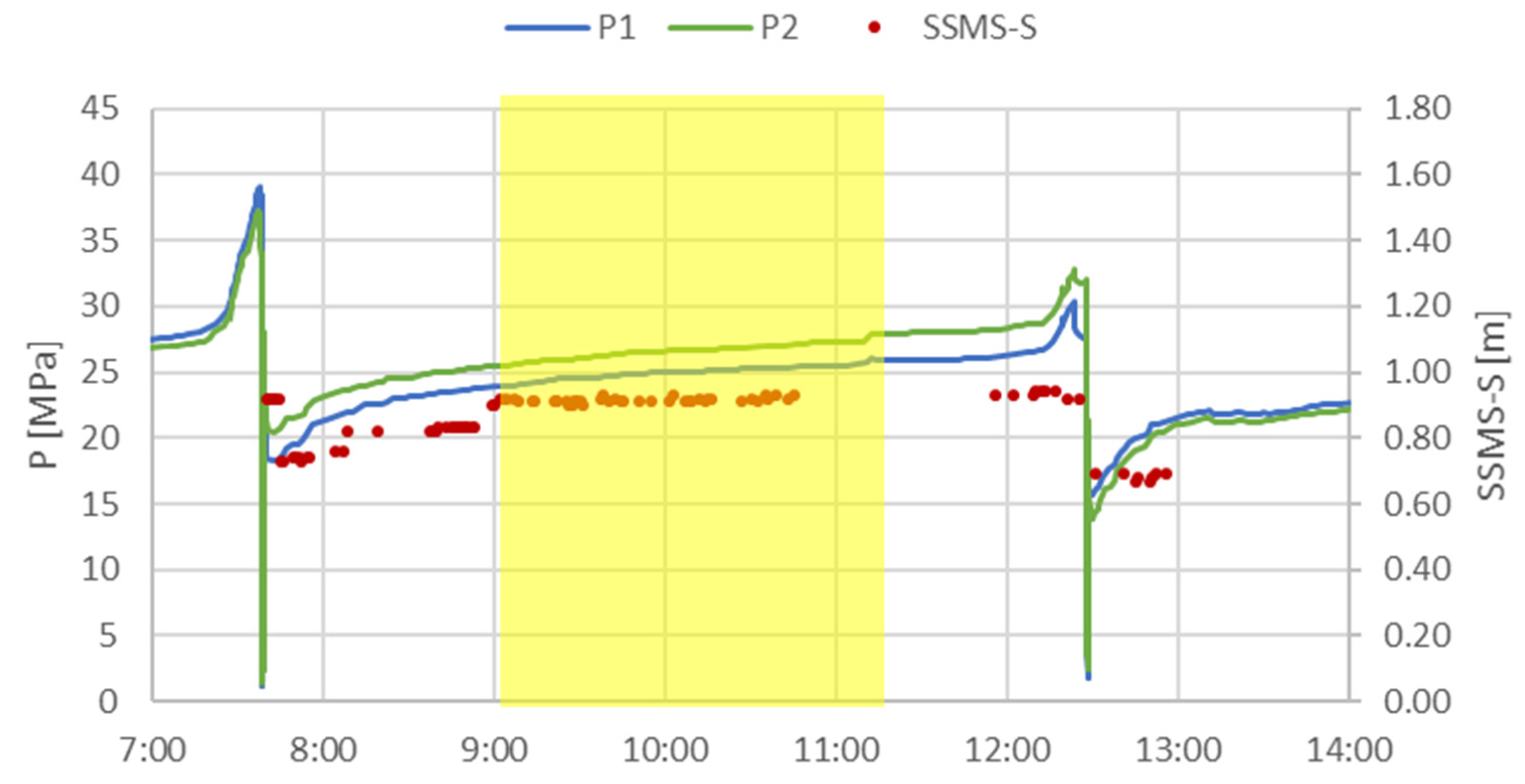
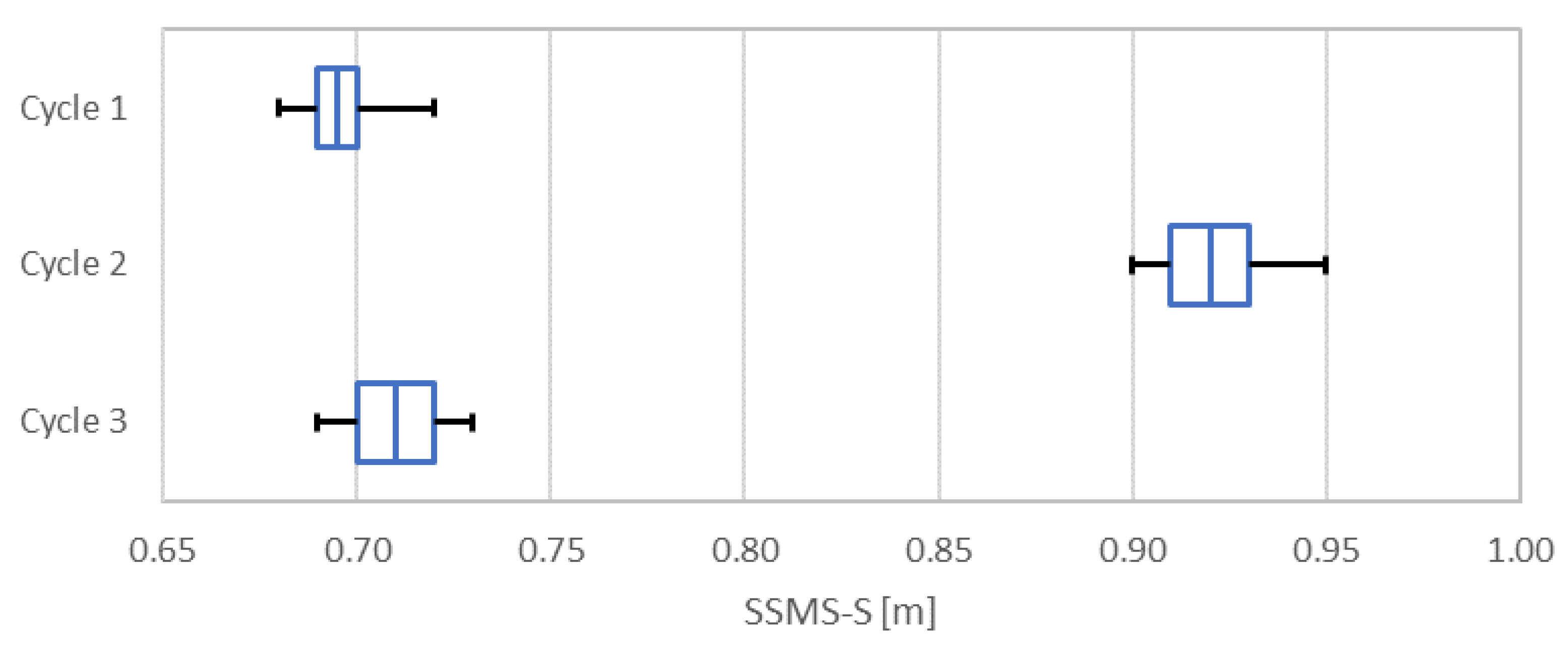
3. Results
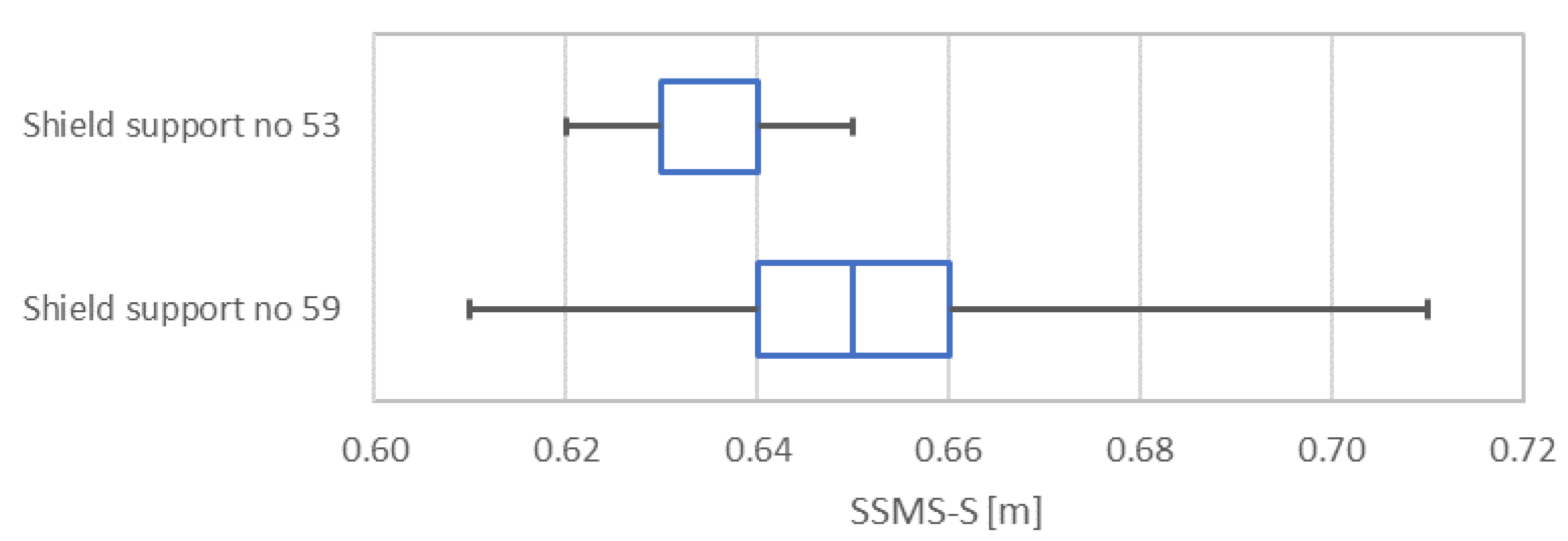
- Position of outliers;
- Position of untypical values;
- Position of the highest and lowest values (or the highest and lowest values not deviating from others);
- Position of quartiles.
- : the first quartile, divides a frequency distribution in the ratio 25%:75%;
- : the second quartile or median, divides a frequency distribution in the ratio 50%:50%;
- : the third quartile, divides a frequency distribution in the ratio 75%:25%.
- The maximum value is less than ;
- The minimum value is greater than .
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Trueman, R.; Thomas, R.; Hoyer, D. Understanding the causes of roof control problems on a longwall face from shield monitoring data—A case study. In Proceedings of the Underground Coal Operators’ Conference, Wollongong, Australia, 10–11 February 2011; pp. 40–47. [Google Scholar]
- Jasiulek, D.; Bartoszek, S.; Lubryka, J. Productivity and safety of shield support—PRASS III. Masz. Górnicze 2019, 1, 73–79. [Google Scholar]
- Jasiulek, D. Monitoring of the mining powered roof support geometry. J. Mach. Constr. Maint. 2019, 3, 73–79. [Google Scholar] [CrossRef]
- Biliński, A. Metoda Doboru Obudowy Ścianowych Wyrobisk Wybierkowych i Chodnikowych do Warunków Pola Eksploatacyjnego; CMG KOMAG: Gliwice, Poland, 2005. [Google Scholar]
- Galvin, J.M. Ground Engineering. Principles and Practices for Underground Coal Mining; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Shi, W.; Yin, Z.; Li, Y.; Chang, J.; Miao, X. Influence Characteristics of Double-Stratum Hard Roof Movement in a Fully Mechanized Top Coal Caving on the Working Resistance of Supports. J. Eng. Sci. Technol. Rev. 2020, 13, 57–66. [Google Scholar] [CrossRef]
- Verma, A.K.; Kishore, K.; Chatterjee, S. Prediction Model of Longwall Powered Support Capacity Using Field Monitored Data of a Longwall Panel and Uncertainty-Based Neural Network. Geotech. Geol. Eng. 2016, 34, 2033–2052. [Google Scholar] [CrossRef]
- Herezy, Ł.; Janik, D.; Skrzypkowski, K. Powered Roof Support—Rock Strata Interactions on the Example of an Automated Coal Plough System. Studia Geotech. Mech. 2018, 40, 46–55. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Ning, J.; Jiang, L.; Jiang, J.-Q.; Bu, T. Structural characteristics of strata overlying of a fully mechanized longwall face: A case study. J. S. Afr. Inst. Min. Metall. 2018, 118, 1195–1204. [Google Scholar] [CrossRef] [Green Version]
- Jasiulek, D.; Bartoszek, S.; Perůtka, K.; Korshunov, A.; Jagoda, J.; Płonka, M. Shield Support Monitoring System—Operation during the support setting. Acta Montan. Slovaca 2019, 24, 391–401. [Google Scholar]
- Szurgacz, D.; Brodny, J. Tests of Geometry of the Powered Roof Support Section. Energies 2019, 12, 3945. [Google Scholar] [CrossRef] [Green Version]
- Rajwa, S. The influence of the geometrical construction of the powered roof support on the loss of a longwall working stability based on the practical experience. Arch. Min. Sci. 2020, 65, 511–529. [Google Scholar]
- Cheng, J.; Wan, Z.; Ji, Y. Shield-Roof Interaction in Longwall Panels: Insights from Field Data and Their Application to Ground Control. Adv. Civ. Eng. 2018, 2018, 3031714. [Google Scholar] [CrossRef]
- Yang, J.X.; Liu, C.Y.; Yu, B. The interaction between face support and surrounding rock and its rib weakening mechanism in hard coal seam. Acta Montan. Slovaca 2017, 22, 67–78. [Google Scholar]
- Langosch, U.; Ruppel, U.; Wyink, U. Longwall roof control by calculation of the shield support requirements. In Proceedings of the 2003 Coal Operators’ Conference, Wollongong, Australia, 12–14 February 2003. [Google Scholar]
- PRASS III Website. Available online: http://prass3.komag.eu (accessed on 20 September 2021).
- Bartoszek, S.; Jendrysik, S.; Rogala-Rojek, J.; Woszczyński, M.; Krauze, K.; Joostberens, J. State-of-the-artultrasonic sensor designed to improvelongwall production rates and operation safety. Acta Montan. Slovaca 2021, 26, 149–160. [Google Scholar]
- Stankiewicz, K.; Jagoda, J.; Tonkins, M. Intelligent algorithms for routing sensory networks operating in explosion hazard zones. Min. Sci. 2021, 28, 103–115. [Google Scholar] [CrossRef]
- Becker Mining Systems. Available online: https://www.becker-mining.com.pl/en/face-equipment/ (accessed on 24 September 2021).
- Data Science Textbook. Available online: https://docs.tibco.com/data-science/textbook (accessed on 27 September 2021).
- Create a Box and Whisker Chart. Available online: https://support.microsoft.com/en-us/office/create-a-box-and-whisker-chart-62f4219f-db4b-4754-aca8-4743f6190f0d (accessed on 27 September 2021).
- Ott, R.L.; Longnecker, M.T. An Introduction to Statistical Methods and Data Analysis; Brooks/Cole, Cengage Learning: Belmont, MA, USA, 2010. [Google Scholar]
- Heumann, C.; Schomaker, M. Introduction to Statistics and Data Analysis: With Exercises, Solutions and Applications in R; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Kurkiewicz, J.; Stonawski, M. Podstawy Statystyki; Krakowskie Towarzystwo Edukacyjne sp. z o.o.: Kraków, Poland, 2005. [Google Scholar]
- Pawlikowski, A. Przyczyny asymetrii podporności stojaków sekcji obudowy zmechanizowanej w świetle badań dołowych. Masz. Górnicze 2017, 1, 45–54. [Google Scholar]
- Rajwa, S.; Lubosik, Z.; Płonka, M. Safety of longwall mining with caving in the light of data from monitoring systems. IOP Conf. Ser. Mater. Sci. Eng. 2019, 679, 012021. [Google Scholar] [CrossRef]
- Rajwa, S.; Lubosik, Z.; Płonka, M. Bezpieczeństwo eksploatacji ścian zawałowych w świetle danych z systemów monitoringu. Masz. Górnicze 2019, 4, 24–34. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Roof Support No. 53 | Roof Support No. 59 |
|---|---|---|
| Average | 0.634 | 0.652 |
| Standard error | 0.001 | 0.001 |
| Standard deviation | 0.009 | 0.020 |
| Minimum | 0.620 | 0.610 |
| Maximum | 0.650 | 0.710 |
| Range | 0.030 | 0.100 |
| Median | 0.630 | 0.650 |
| Dominant | 0.630 | 0.640 |
| Quartile Q1 | 0.630 | 0.640 |
| Quartile Q3 | 0.630 | 0.640 |
| Median-Q1 | 0.640 | 0.660 |
| Q3-Median | 0.000 | 0.010 |
| Kurtosis | −0.763 | 0.099 |
| Skewness | 0.114 | 0.882 |
| Confidence level (95%) | 0.00146 | 0.00164 |
| Coefficient of variation | 1.434% | 3.081% |
| Name | Cycle 1 | Cycle 2 | Cycle 3 |
|---|---|---|---|
| Average | 0.767 | 0.918 | 0.709 |
| Standard error | 0.001 | 0.002 | 0.001 |
| Standard deviation | 0.008 | 0.014 | 0.010 |
| Minimum | 0.680 | 0.900 | 0.690 |
| Maximum | 0.720 | 0.950 | 0.730 |
| Range | 0.040 | 0.050 | 0.040 |
| Median | 0.695 | 0.920 | 0.710 |
| Dominant | 0.690 | 0.910 | 0.710 |
| Quartile Q1 | 0.690 | 0.910 | 0.710 |
| Quartile Q3 | 0.690 | 0.910 | 0.700 |
| Median-Q1 | 0.700 | 0.930 | 0.720 |
| Q3-Median | 0.005 | 0.010 | 0.010 |
| Kurtosis | 1.066 | −0.429 | −0.586 |
| Skewness | 0.844 | 0.627 | −0.173 |
| Confidence level (95%) | 0.00279 | 0.00445 | 0.00279 |
| Coefficient of variation | 1.047% | 1.574% | 1.370% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bartoszek, S.; Rogala-Rojek, J.; Jasiulek, D.; Jagoda, J.; Turczyński, K.; Szyguła, M. Analysis of the Results from In Situ Testing of a Sensor In-Stalled on a Powered Roof Support, Developed by KOMAG, Measuring the Tip to Face Distance. Energies 2021, 14, 8541. https://doi.org/10.3390/en14248541
Bartoszek S, Rogala-Rojek J, Jasiulek D, Jagoda J, Turczyński K, Szyguła M. Analysis of the Results from In Situ Testing of a Sensor In-Stalled on a Powered Roof Support, Developed by KOMAG, Measuring the Tip to Face Distance. Energies. 2021; 14(24):8541. https://doi.org/10.3390/en14248541
Chicago/Turabian StyleBartoszek, Sławomir, Joanna Rogala-Rojek, Dariusz Jasiulek, Jerzy Jagoda, Krzysztof Turczyński, and Marek Szyguła. 2021. "Analysis of the Results from In Situ Testing of a Sensor In-Stalled on a Powered Roof Support, Developed by KOMAG, Measuring the Tip to Face Distance" Energies 14, no. 24: 8541. https://doi.org/10.3390/en14248541
APA StyleBartoszek, S., Rogala-Rojek, J., Jasiulek, D., Jagoda, J., Turczyński, K., & Szyguła, M. (2021). Analysis of the Results from In Situ Testing of a Sensor In-Stalled on a Powered Roof Support, Developed by KOMAG, Measuring the Tip to Face Distance. Energies, 14(24), 8541. https://doi.org/10.3390/en14248541