
Integrated Electric Vehicle Shunt Current Sensing System for Concurrent Revenue Metering and Detection of DC Injection †



Abstract
:1. Introduction
2. Prototype Design
2.1. System Requirements
2.2. Selecting the Current Sensor
2.3. Shunt Current Sensor Operating Principle
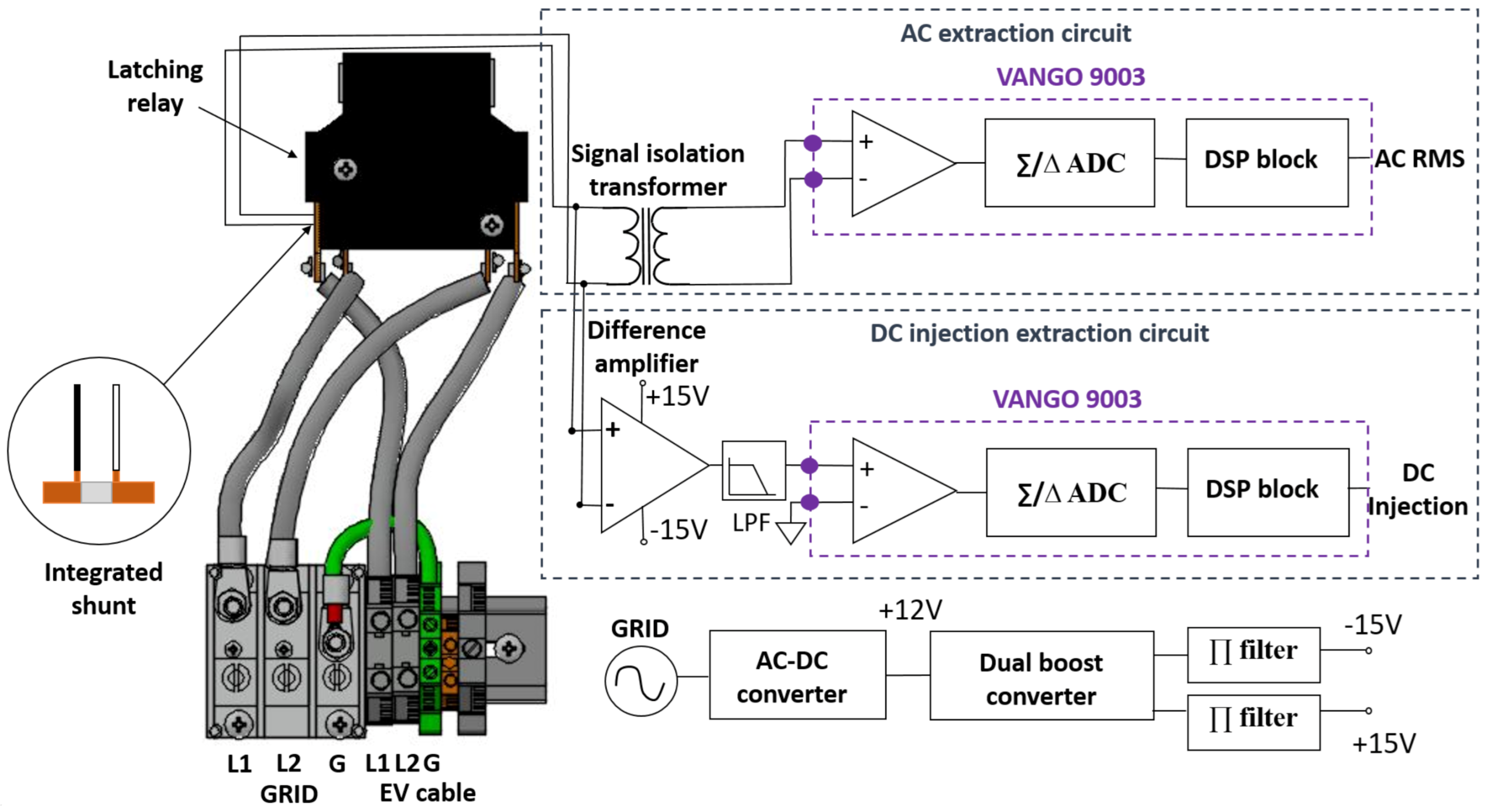
2.4. Prototype System Components
2.5. Design Challenges
2.5.1. Single Sensor for AC and DC Measurements
2.5.2. High-Side Current Sensing
2.5.3. Power Dissipation and Energy Losses
2.6. Power and Energy Losses due to the Shunt
3. Prototype Validation
3.1. Accuracy of AC Current Measurements
3.2. DC Injection Detection
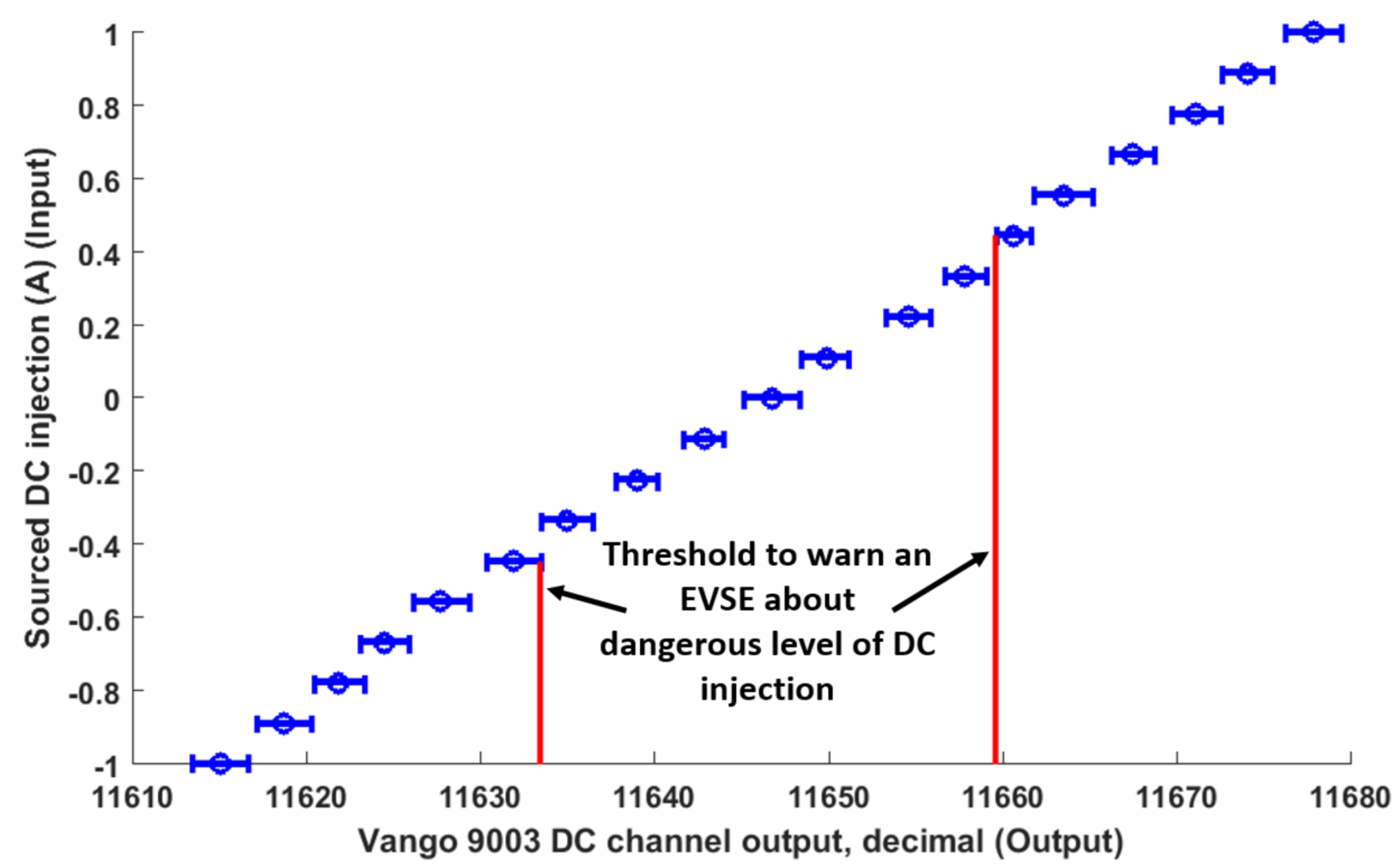
3.2.1. Accuracy of DC Injection Detection
3.2.2. Effect of Large AC Current on DC Injection Detection
3.3. Prototype System Cost-Effectiveness
3.4. Future Work
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Muscas, C.; Pau, M.; Pegoraro, P.A.; Sulis, S. Smart electric energy measurements in power distribution grids. IEEE Instrum. Meas. Mag. 2015, 18, 17–21. [Google Scholar] [CrossRef]
- IEEE 1547-2018, IEEE Standard for Interconnection and Interoperability of Distributed Energy Resources with Accociated Electric Power Systems Interfaces; IEEE Standards Association: Piscataway Township, NJ, USA, 2018.
- Gertmar, L.; Karlsson, P.; Samuelsson, O. On DC injection to AC grids from distributed generation. In Proceedings of the European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005. [Google Scholar] [CrossRef]
- Zobaa, A.F.; Cecati, C. A Comprehensive Review on Distributed Power Generation. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion SPEEDAM, Taormina, Italy, 23–26 May 2006. [Google Scholar] [CrossRef]
- Kempton, W.; Tomić, J. Vehicle-to-grid power fundamentals: Calculating capacity and net revenue. J. Power Sources 2005, 144, 268–279. [Google Scholar] [CrossRef]
- Mironenko, O. Detection of DC Injection and Measuring AC Current with a Single System for Electric Vehicle Charging and Discharging. Ph.D. Thesis, University of Dealware, Newark, DE, USA, 2020; pp. 4–21. [Google Scholar]
- Rietveld, G.; Braun, J.P.; Martin, R.; Wright, P.; Heins, W.; Ell, N.; Clarkson, P.; Zisky, N. Measurement infrastructure to support the reliable operation of smart electrical grids. IEEE Trans. Instrum. Meas. 2015, 64, 1355–1363. [Google Scholar] [CrossRef]
- IEC 62053-11:2003, Electricity Metering Equipment (a.c.)—Particular Requirements—Part 11: Electromechanical Meters for Active Energy (Classes 0.5, 1 and 2); International Standard; International Electrotechnical Commission: Geneva, Switzerland, 2003.
- American National Standard for Electricity Meters 0.1, 0.2 and 0.5 Accuracy Classes, ANSI C.12-20; Approved American National Standard; American National Standards Institute: New York, NY, USA, 2017.
- Berba, F.; Atkinson, D.; Armstrong, M. A new approach of prevention of DC current component in transformerless grid-connected PV inverter application. In Proceedings of the IEEE 5th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Galway, Ireland, 24–27 June 2014; pp. 1–7. [Google Scholar] [CrossRef]
- Zhang, W.; Armstrong, M.; Elgendy, M. DC current determination in grid-connected transformerless inverter systems using a DC link sensing technique. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 5775–5782. [Google Scholar] [CrossRef]
- Abdelhakim, A.; Mattavelli, P.; Yang, D.; Blaabjerg, F. Coupled-inductor-based DC current measurement technique for transformerless grid-tied inverters. IEEE Trans. Power Electron. 2018, 33, 18–23. [Google Scholar] [CrossRef] [Green Version]
- EV Meter Accuracy Testing; Final Test Report for University of Delaware; Tesco Engineering: Jubail Industrial City, Saudi Arabia, 2019.
- Butcher, T.G. Specifications, Tolerances, and Other Technical Requirements for Weighing and Measuring Devices; Standard, National Institute of Standards and Technology Handbook 44; US Department of Commerce, National Institute of Standards and Technology: Gaithersburg, MD, USA, 2020.
- DR Metering Requirements; Technical Report; PJM: Norristown, PA, USA, 2018.
- Crescentini, M.; Marchesi, M.; Romani, A.; Tartagni, M.; Traverso, P.A. A broadband, on-chip sensor based on Hall effect for current measurements in smart power circuits. IEEE Trans. Instrum. Meas. 2018, 67, 1470–1485. [Google Scholar] [CrossRef]
- Masi, M.G.; Peretto, L.; Tinarelli, R. Design and performance analysis of a differential current sensor for power system applications. IEEE Trans. Instrum. Meas. 2012, 61, 3207–3215. [Google Scholar] [CrossRef]
- Xiao, C.; Zhao, L.; Asada, T.; Odendaal, W.; Van Wyk, J. An overview of integratable current sensor technologies. In Proceedings of the 38th IAS Annual Meeting on Conference Record of the Industry Applications Conference, Salt Lake City, UT, USA, 12–16 October 2003; Volume 2, pp. 1251–1258. [Google Scholar] [CrossRef]
- Laurent, A.F.; Iniewski, K. Novel Advances in Microsystems Technologies and Their Applications; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2016; pp. 266–287. [Google Scholar]
- Ripka, P. Electric current sensors: A review. Meas. Sci. Technol. 2010, 21, 112001. [Google Scholar] [CrossRef] [Green Version]
- Ziegler, S.; Woodward, R.C.; Iu, H.H.C.; Borle, L.J. Current sensing techniques: A review. IEEE Sens. J. 2009, 9, 354–376. [Google Scholar] [CrossRef]
- Monthly Electric Power Industry Report; Technical Report; U.S. Energy Information Administration: Washington, DC, USA, 2020.
- EKM Metering Inc. BCT-013-200 Current Transformer Spec Sheet; EKM Metering Inc.: Santa Cruz, CA, USA, 2020. [Google Scholar]
- EVSE High Current Tester Manual; Technical Report; University of Delaware: Newark, DE, USA, 2018.
- ISO 5725-1:1994(en) Accuracy (Trueness and Precision) of Measurement Methods and Results; International Standard; International Organization for Standardization: Geneva, Switzerland, 1994.



{kind=link}
{kind=link}
| Parameters | Requirements | |
|---|---|---|
| Single-Phase | Three-Phase | |
| (19.2 kW) | (100 kW) | |
| Voltage (L-N) | 120 V, 230 V | 230 V, 277 V, 347 V |
| DC injection limit | 0.5% of | 0.5% of |
| DC injection detection accuracy | 20% | 20% |
| at the limit value | ||
| AC current metering accuracy classes | 0.5, 1.0, 2.0 | 0.5, 1.0, 2.0 |
| 80 A | 120 A | |
| Part Name | Part Number | Specifications |
|---|---|---|
| Relay with shunt integrated (single-phase) | K237X-S006P -2AT-C946 | Max current rating: 100 A |
| Shunt resistance: 280 | ||
| Shunt tolerance: ±5% | ||
| Shunt Temperature Coefficient of Resistance (TCR): 0–15 (C) (10–80 C) | ||
| Relay with shunt integrated (three-phase) | K316X-S006P -3BT-C1047 | Max current rating: 120 A |
| Shunt resistance: 280 | ||
| Shunt tolerance: ±5% | ||
| Shunt Temperature Coefficient of Resistance (TCR): 0–15 (C) (10–80 C) | ||
| Signal transformer | TTC-5036 | Frequency range: 200 Hz–4 kHz |
| Voltage isolation: 1875 @1 s | ||
| Difference amplifier | AD8479 | = 600 V |
| = ±15 V | ||
| CMRR = 80 dB–90 dB | ||
| Gain = 1 | ||
| Signal processing microcontroller | Vango9003 | Three-phase multi-functional energy meter |
| Charging | ||||
|---|---|---|---|---|
| (A) | (A) | S() (A) | Bias error (%) | Precision error (%) |
| 6 | 6.15 | 0.055 | 2.5 | 0.89 |
| 10 | 10.14 | 0.052 | 1.38 | 0.52 |
| 15 | 15.09 | 0.041 | 0.57 | 0.37 |
| 20 | 20.09 | 0.041 | 0.43 | 0.20 |
| 35 | 35.2 | 0.000 | 0.57 | 0.00 |
| Discharging | ||||
| (A) | (A) | S() (A) | Bias (%) | Precision error (%) |
| 6 | 5.93 | 0.052 | 1.1 | 0.87 |
| 10 | 9.96 | 0.052 | 0.38 | 0.52 |
| 15 | 15.95 | 0.055 | 0.33 | 0.37 |
| 20 | 19.99 | 0.041 | 0.07 | 0.20 |
| 35 | 35.06 | 0.052 | 0.18 | 0.15 |
| CT + Hall Effect Sensor | Shunt Prototype System | ||||
|---|---|---|---|---|---|
| Part No | Qty | Price | Part No | Qty | Price |
| BCT-013-200 CT | 1 | $14 | Shunt | 1 | $3 |
| Vango 9003 | 1 | $3.15 | Vango 9003 | 1 | $3.15 |
| LEM LA-150P | 1 | $19.04 | AD8479ARZ-RL | 1 | $4.25 |
| TTC-5036 | 1 | $2.52 | |||
| LT1945EMS | 1 | $2.60 | |||
| Approximate total cost | $36.19 | $15.52 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mironenko, O.; Ejzak, G.; Kempton, W. Integrated Electric Vehicle Shunt Current Sensing System for Concurrent Revenue Metering and Detection of DC Injection. Energies 2021, 14, 1193. https://doi.org/10.3390/en14041193
Mironenko O, Ejzak G, Kempton W. Integrated Electric Vehicle Shunt Current Sensing System for Concurrent Revenue Metering and Detection of DC Injection. Energies. 2021; 14(4):1193. https://doi.org/10.3390/en14041193
Chicago/Turabian StyleMironenko, Olga, Garrett Ejzak, and Willett Kempton. 2021. "Integrated Electric Vehicle Shunt Current Sensing System for Concurrent Revenue Metering and Detection of DC Injection" Energies 14, no. 4: 1193. https://doi.org/10.3390/en14041193
APA StyleMironenko, O., Ejzak, G., & Kempton, W. (2021). Integrated Electric Vehicle Shunt Current Sensing System for Concurrent Revenue Metering and Detection of DC Injection. Energies, 14(4), 1193. https://doi.org/10.3390/en14041193