5.2. Single Assembly 3D Neutronic Evaluation
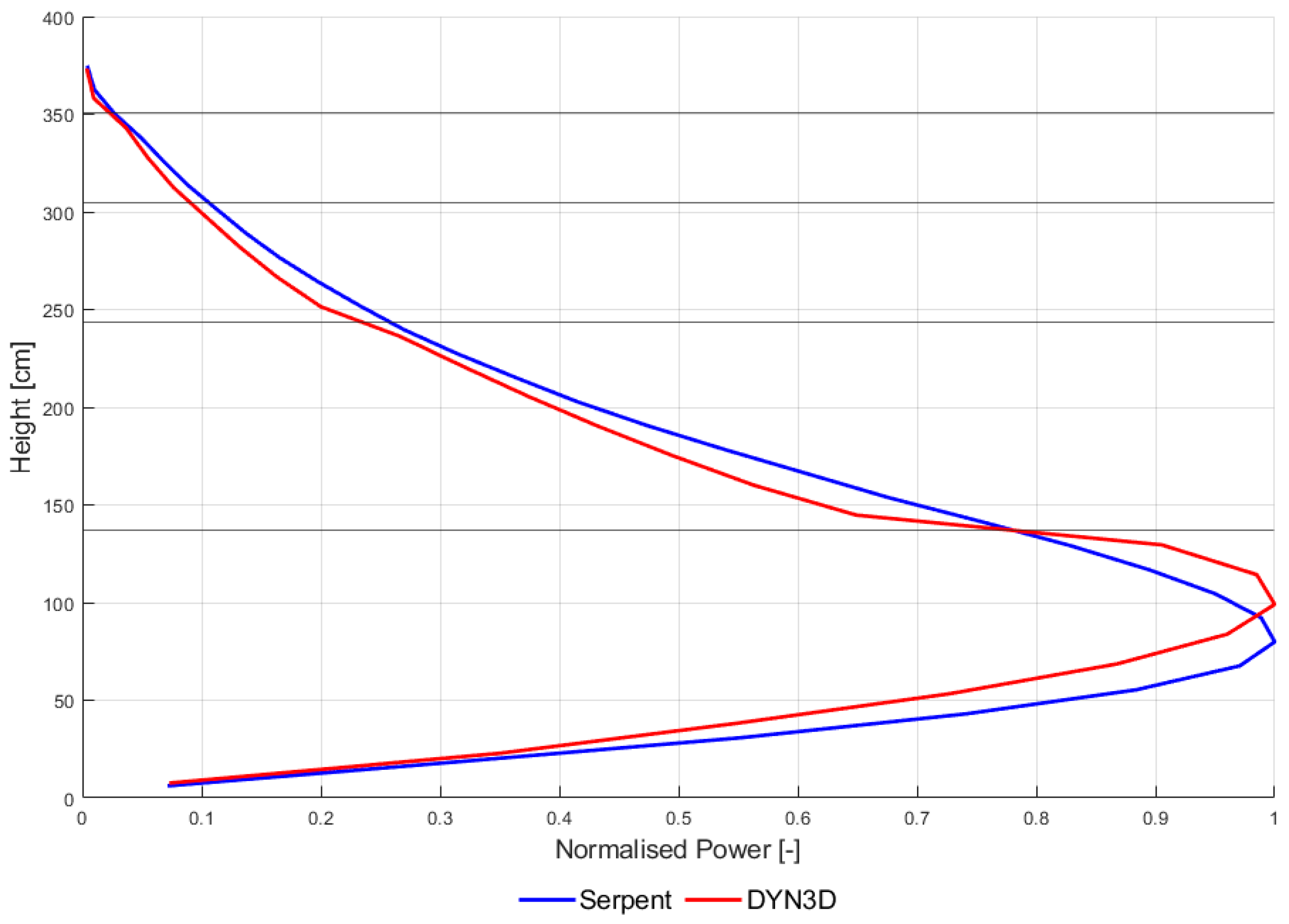
The 3D single assembly evaluation aims to progressively increase the complexity of the design to determine at which points the assumptions within the software methods start to affect the results. The initial study assumes a uniform fuel composition based on level one of fuel assembly two for the whole height of the fuel, with a uniform water density but real boundary conditions; this represents the simplest case study with the axial power profile depicted in
Figure 8. The power profiles are in very good agreement with one another with this simple test.
The next stage introduces the water density variation across the axial height while the material is kept constant through the whole axial assembly; thus, the first case is created with real influence of a thermal hydraulics parameter but still without the coupling of neutronics and thermal hydraulics. Within the industrial method, the water density must be averaged across the heights represented by that cross-section, which deviates from the high-fidelity method which can incorporate each stage of the water density. It must be mentioned here that the water density in the core simulator is based on the water density of the four levels of the cross-section preparation while in later simulations the real water density is finally determined through the thermal hydraulics module of the core simulator.
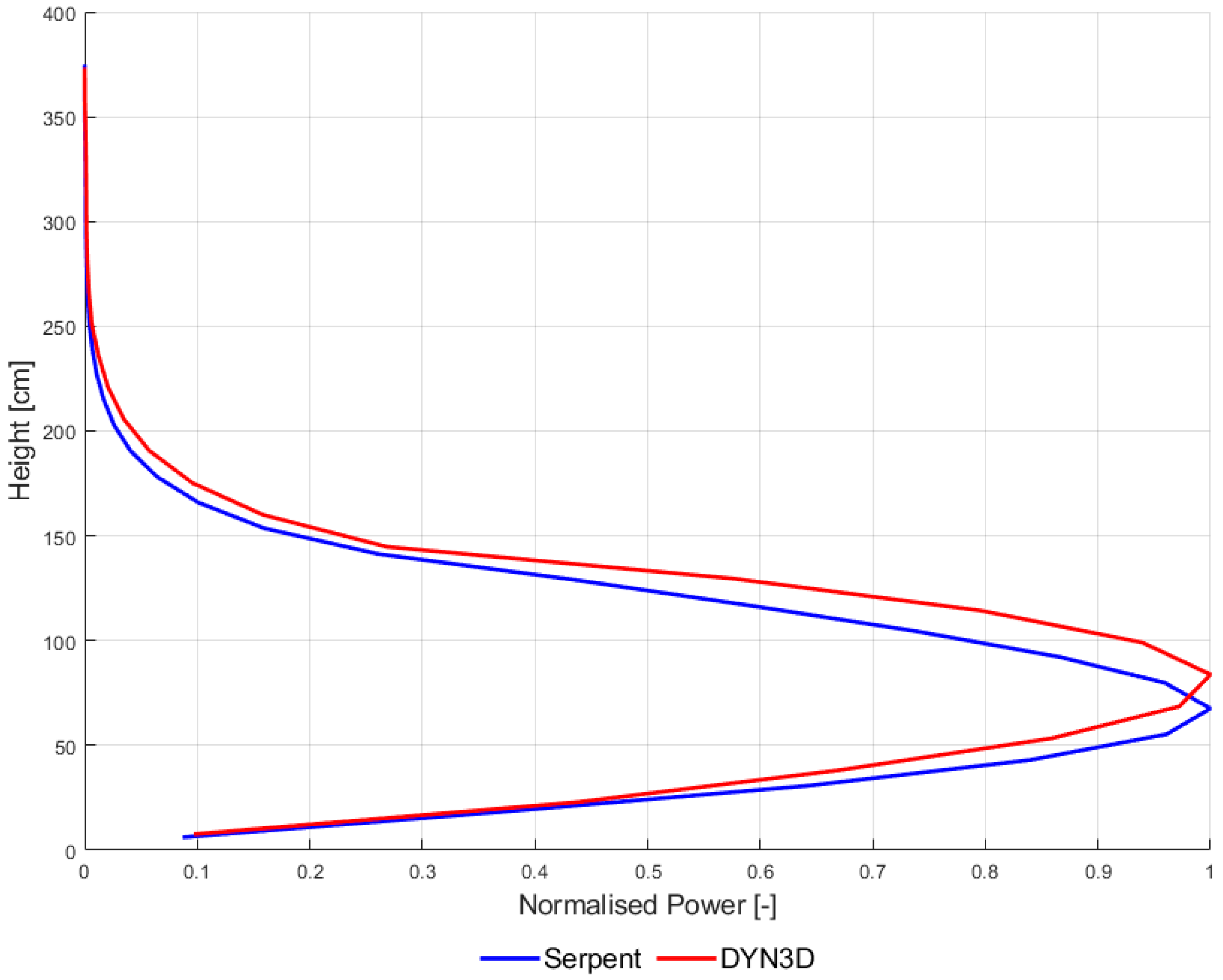
Within
Figure 9, it becomes obvious that the averaging process (based on four levels) plays a significant role within the peak power location as DYN3D’s power peak is at a different location to Serpent’s. DYN3D also shows that following a new water density input, there is a change in gradient of the power profile; this is due to the averaging process creating a virtual boundary between these levels, and the diffusion equation must determine the flux distribution between these levels and, hence, the power change. The results in the analysis are concerning as the assumptions for the purely neutronic model does seem to break down once the water distribution is added. It should be noted that as DYN3D is meant to be used as a coupled solver and a further evaluation of these results is required once DYN3D produces its own water density profile across the geometry as the boundaries seen within
Figure 9 will be reduced in this case as the water density variation between nodes becomes smaller.
The criticality of the system (k
eff) provides an insight into the behaviour of the neutronic solver and is often used as a method of validation. Within this case two tests were performed using Serpent, one with and one without the thermal scattering libraries linked to the coolant material, these libraries increase the accuracy when bound atoms such as water [
43] are used. In the case of the industrial method, the thermal scattering libraries are already applied within SP when the cross-sections are produced.
Table 3 highlights the very prominent role of the thermal scattering libraries within the Monte Carlo simulations accuracy, as the discrepancy reduces from 590 pcm to 74 pcm. Due to the differences in the power profile, it is difficult to determine if this is an error reduction as the systems behave in very different ways; however, the inclusion of the scattering libraries does play a significant role within the systems’ behaviour. This highlights one drawback when using the high-fidelity method, as the current version of Serpent does not support the inclusion of thermal scattering libraries when using the interface cards feature which is required for the coupling procedure to assign the water density and temperature axially. Thus, this study has highlighted that the high-fidelity method will include an error when modelling BWR’s due to the modelling methodology not currently being capable of accurately predicting the criticality effect of the thermal scattering in water.
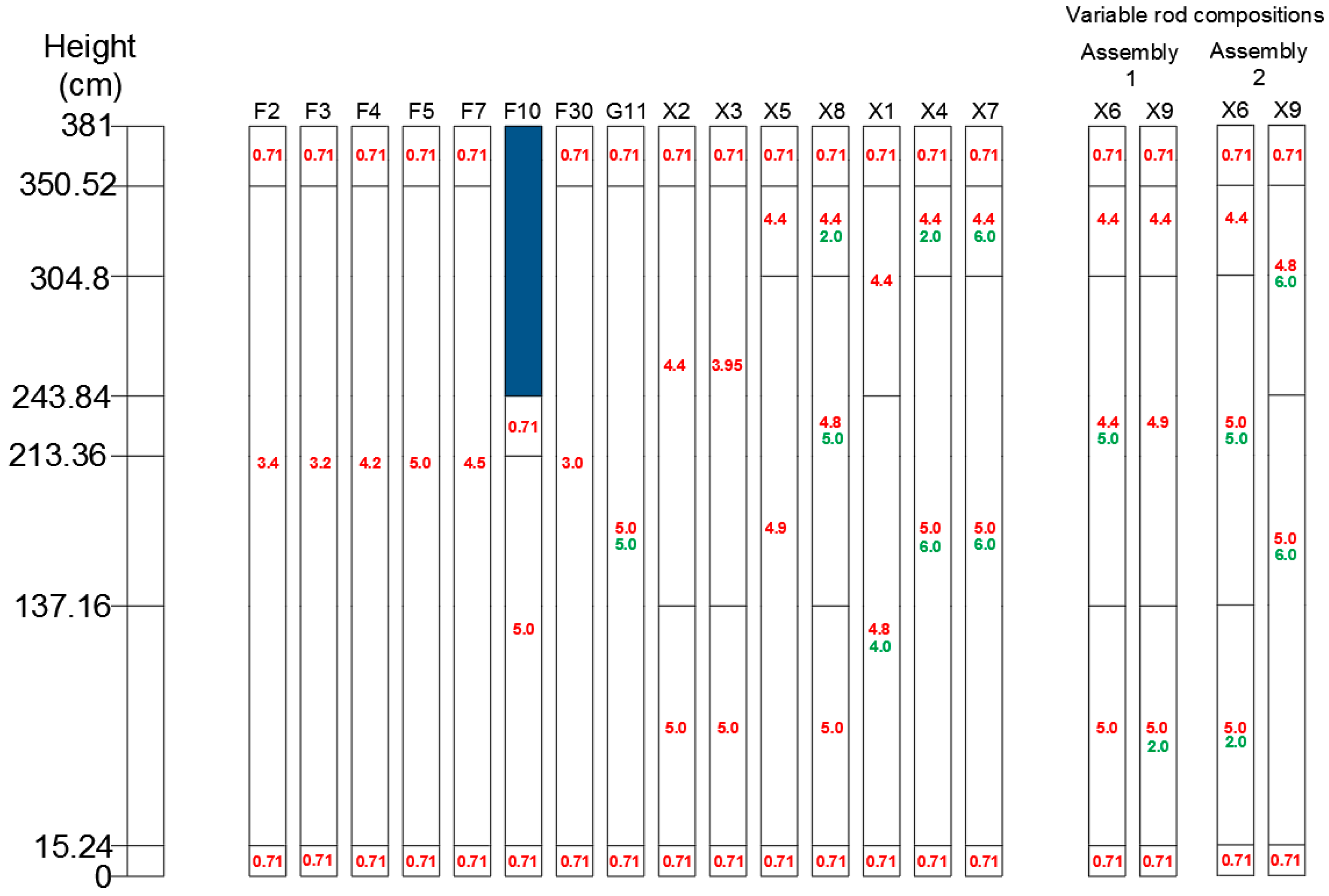
The next stage represents the real fuel assembly, with four axial material compositions (see
Figure 5) with each using a new cross section set to account for the change in materials while the water density is kept uniform. Nodal diffusion methods have been shown to work accurately when passing through a uniform material although this method breaks down at high flux gradient boundaries which could occur between the fuel levels due to the inclusion of fixed burnable poison or between high/low moderated regions.
Figure 10 investigates the severity of the flux gradients between the fuel levels. In this case, the codes are within very good agreement of one another, which implies that these flux gradients caused by the material compositions are on a magnitude that can be treated to an acceptable accuracy through diffusion approximation; thus, no major differences can be noticed between the solvers.
The final study aims to determine the combined effect of all the previous cases, with four levels and a non-uniform water distribution based on the levels, without direct neutronic/thermal hydraulic coupling.
Applying the full set (four levels with different materials and different water densities) leads to a similar power peak shift within
Figure 11, as with the earlier study and this was determined to be caused by the non-uniform water density (
Figure 9). An emphasis on the importance of the thermal scattering libraries is evident from
Table 4. However, the total discrepancies for the four leveled approach are slightly lower than with the uniform fuel case with different water densities. Overall, up until now, this study has already highlighted several key aspects. Initially the high-fidelity method is unable to use the thermal scattering libraries when a non-uniform water density is used which has been shown to create quite large deviations under a uniform water density. Secondly, due to the averaging process used for the cross-section preparation for DYN3D, the power profile is unable to match that of Serpent’s for a purely neutronic analysis with the peak power shifting using the current industrial standard method.
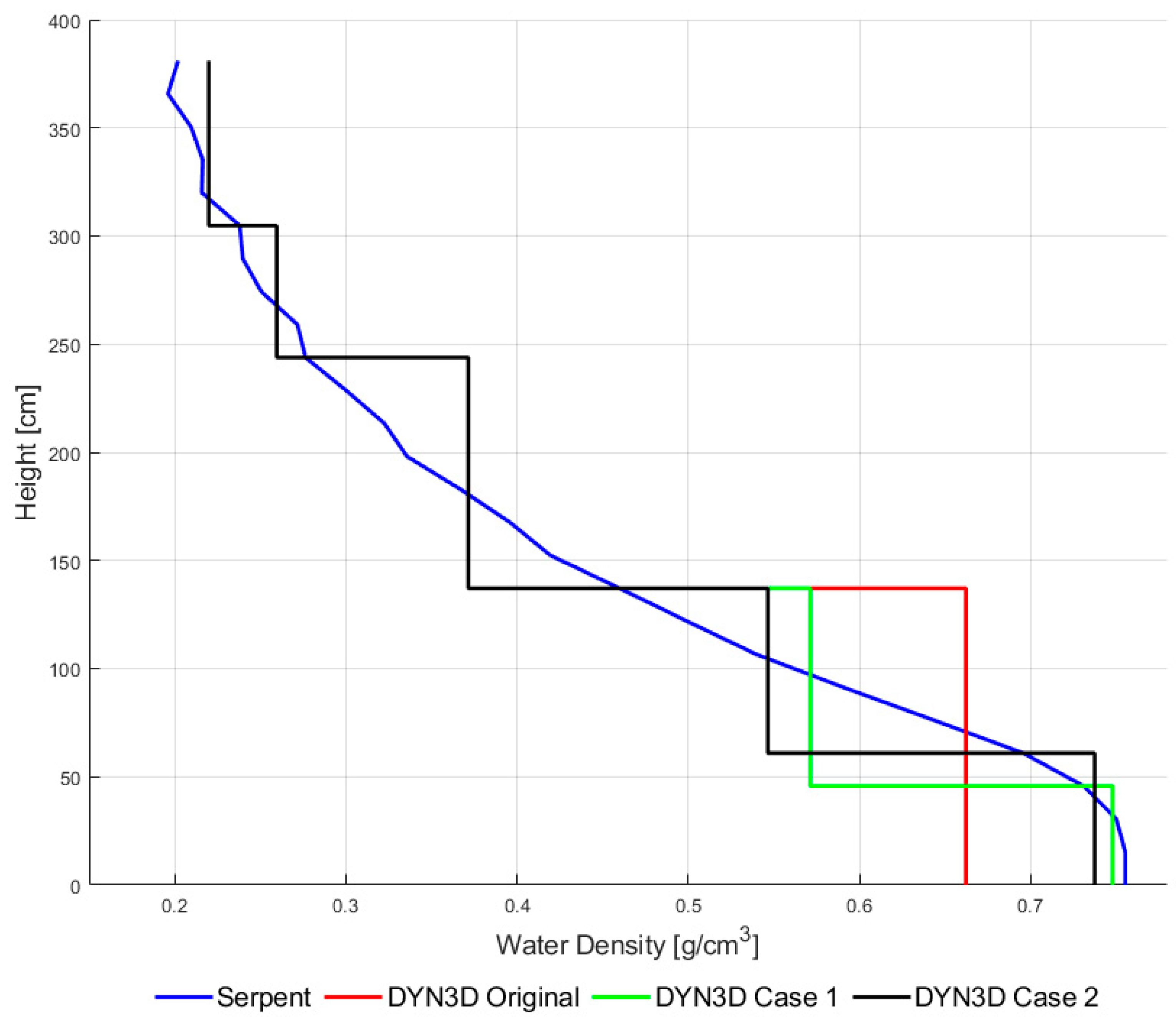
To reduce this shift in the peak, a serial analysis was performed to see if a refined averaging process will provide a closer match in the power profile. To achieve this, level one’s cross sections were split into section by using the two different water density averaging schemes shown in
Figure 12 to reduce the strong step change in water density between level one and two.
The new power distributions in
Figure 13 highlights that case 1 and 2 both provide a power profile which more accurately represents that of Serpent with a broadening of the power peak in DYN3D. It is, therefore, confirmed that the power profiles do experience a shift due to the averaging process used within the nodal analysis, which especially within the lower region of the core which could produce inaccuracy in identifying the peak power location. This has highlighted that a refinement study could be considered within nodal methods to achieve the correct location of the power peaks in the case the problem still appears in the fully coupled solution. This would be less important in PWRs due to the less severe axial variations in the water density.
The effective multiplication factor is also improved by splitting the bottom as depicted in
Table 5. Further evaluations within this article use the original DYN3D model, to best represent the industrial method applied. This has also implied that the use of the thermal scattering libraries is likely to have minimal affect and that the main driver for the errors comes from the nodalisation process of the water density during the cross-section preparation process.
5.3. Single Assembly Coupled Neutronic and Thermal-Hydraulic Evaluation
The core simulator DYN3D comes with a complete coupled neutronics and thermal-hydraulics package which provides steady state and transient opportunities by using a coupling scheme which is determined to have converged once the users defined k
eff variation between iterations is achieved [
44]. Similarly, the coupling process between Serpent and CTF focused on the variation in k
eff between iterations due to thermal feedback effects, where these results are presented in
Table 6.
After seven iterations the variations of k
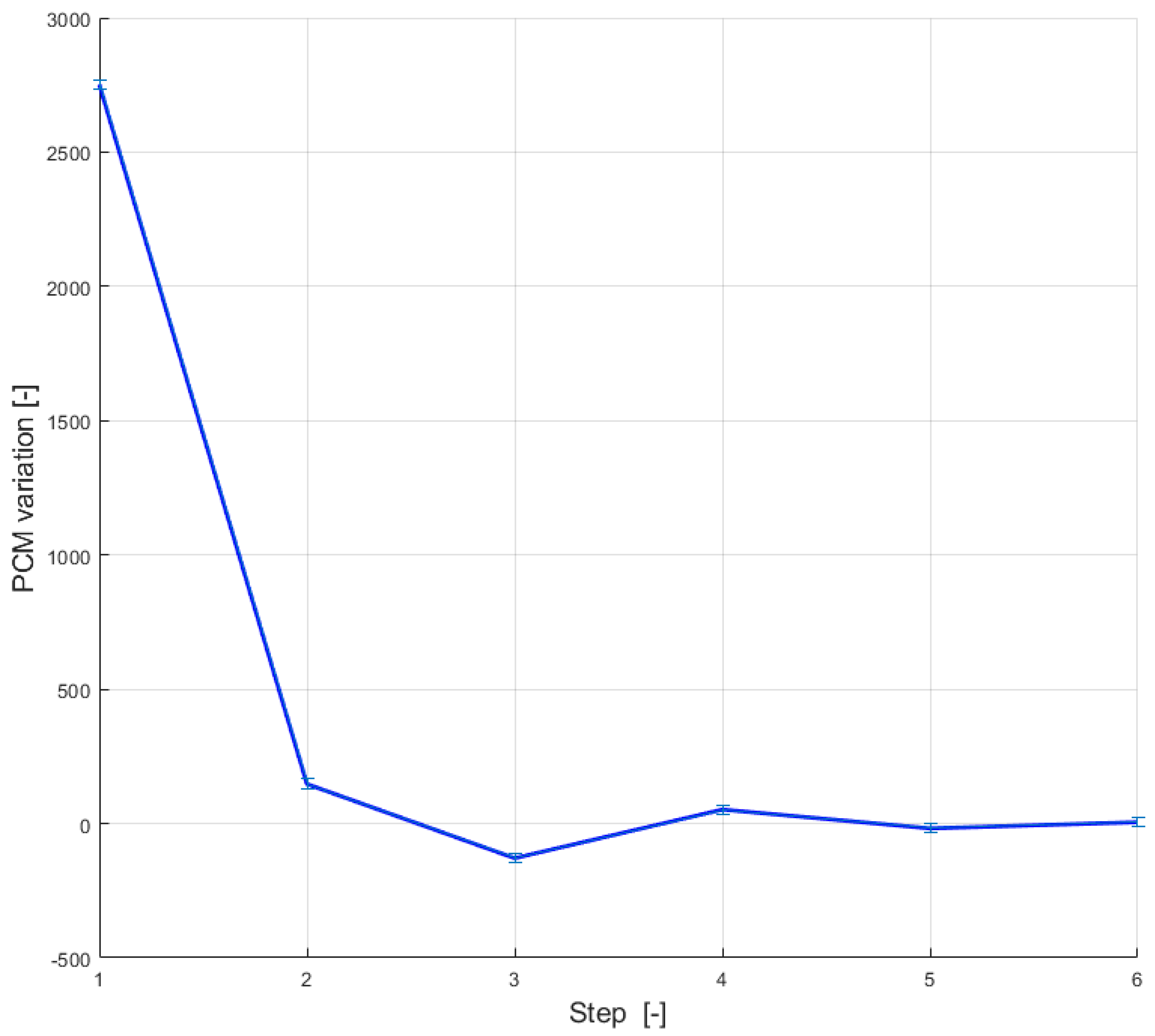
eff the model has converged within the statistical error of the Monte Carlo calculation. A further analysis of the pcm variation per step is provided within
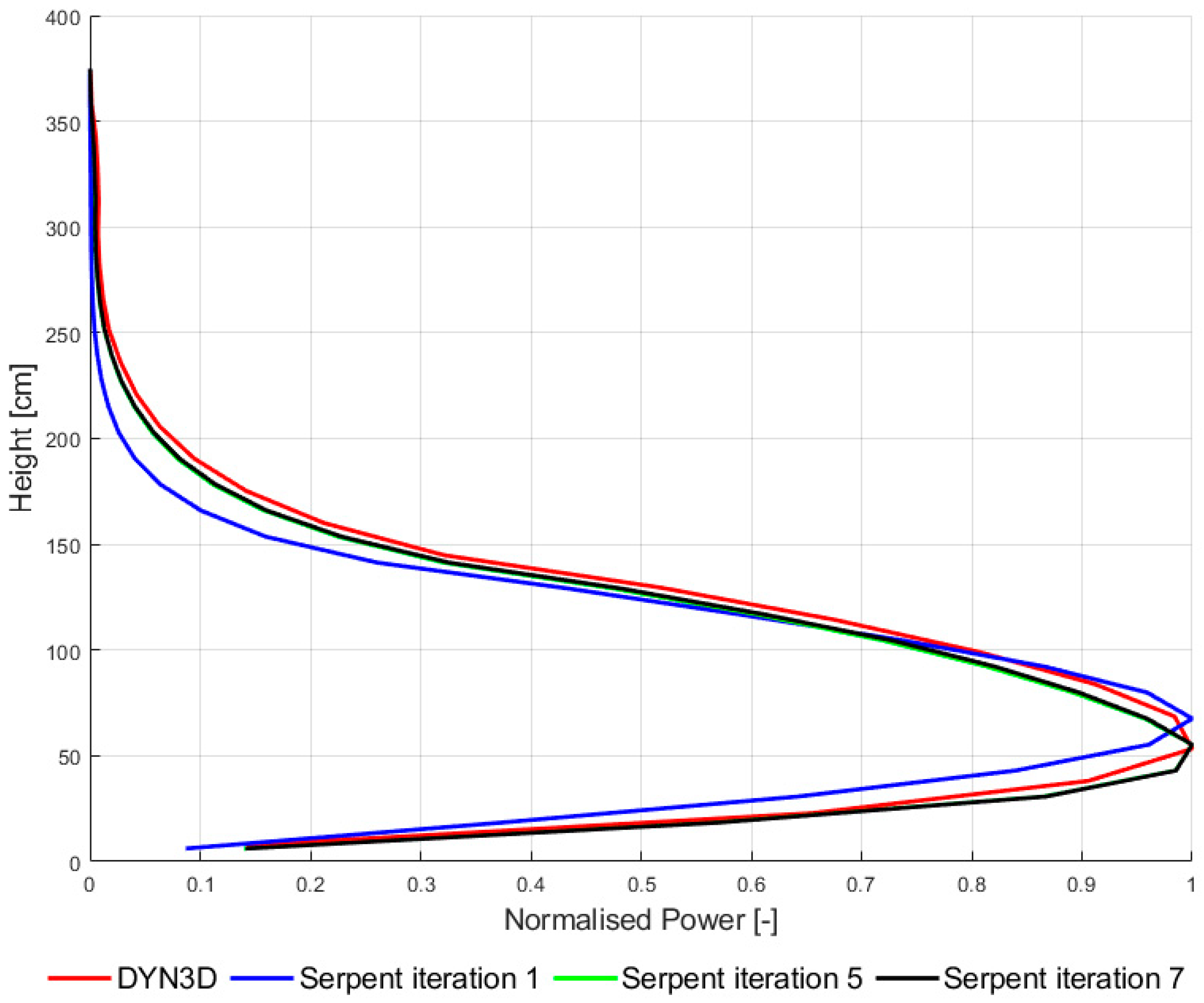
Figure 14, where the largest deviation occurs after the first stage as the water density and temperature deviated from the initial assumption. After stage four, the variations between stages becomes minimal, thus hinting that the system has converged. Earlier efforts highlighted that, despite a low variation in k
eff, the power profile can still vary significantly; to determine if this was the case,
Figure 15 shows that, similarly to k
eff, the power variations are minimal after iteration 5, which represents step 4 in
Figure 14. Following the convergence being met, the full radial power distribution is presented within
Figure 16 where the pin powers remain within their original position and just small deviations in the power are visible as the model converges.
Figure 17 shows the axial power profile delivered by the coupled high-fidelity calculation is within good agreement with the DYN3D results once the simulations have converged. A similar pattern where Serpent’s power profile is slightly lower than DYN3D’s has been observed in the previous chapter; however, this deviation is reduced in the coupled results. This result provides confidence that the 2D-1D approach in DYN3D is able to accurately predict the axial power profile to a high degree of accuracy for this fuel assembly.
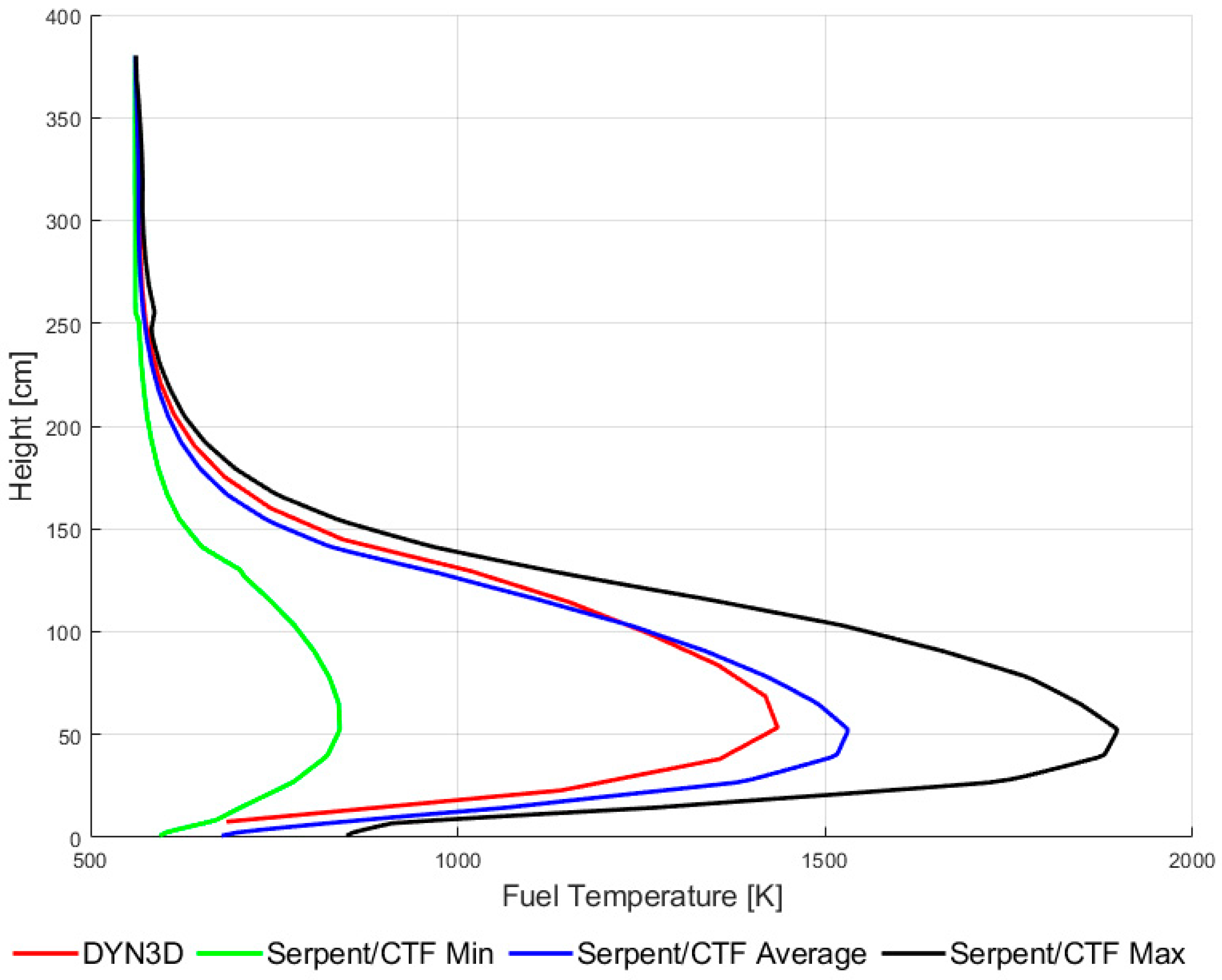
From a safety perspective, the fuel temperature is one of the key parameters for the design process together with the related cladding temperature, as these values provide the safety margin for the design of the fuel itself, but also for the core design. CTF provides a new in-built fuel performance module which provides the fuel surface temperature and centreline temperature which can be obtained for each pin via the pin powers provided by Serpent. DYN3D does not obtain any details within the node, since the approach is based on one representative fuel rod per node, so the fuel centreline temperature is approximated by assuming an even power distribution across all pins which provides the average fuel centreline temperature. To obtain the maximum fuel temperature of the assembly, DYN3D would use an offline pin power reconstruction procedure based on the pin-power map of the lattice calculation. The results can be refined by coupling to a fuel performance code, such as ENIGMA [
45] or TRANSURANUS [
46,
47]; however, this is beyond the scope of this project, so only the average temperatures are considered here.
The slightly shifted power peak in Serpent leads to a similarly shifted fuel temperature peak as highlighted in
Figure 18. The average fuel temperatures between the codes are in very good agreement with one another, showing that the industrial method can provide a good representation of these average results. DYN3D’s slightly elevated temperature would also provide a small safety margin within this case—thus, the result of the industrial code is conservative.
The density of the coolant is one of the key parameters, since within a BWR steam is formed inside the fuel assembly and later is used within the turbine. However, the heat transfer ability of steam is lower than water and the steam bubbles reduce the moderation of neutrons; thus, the coolant density curve is of high importance for any BWR simulation. The average density can be seen in
Figure 19 where the horizontal lines in water density are the positions of the grid spacers. The grid spacers accumulate water due to the restricted flow and induce a slight pressure change; this effect is ignored in DYN3D, which cannot incorporate grid spacers. The grid spacers also create a pressure drop across the axial height, which would slightly reduce the mass flow rate which could account for the slightly higher coolant temperature. The average water density profiles are nearly identical between the two codes, which shows that the high-fidelity method does provide addition detail, while the average value does not differ significantly. This is an impressive outcome keeping in mind the fully modelling each channel and the inclusion of crossflow within the assembly and the inclusion of grid spacers in the high-fidelity solution.
The coolant temperature is also important to understand the phase change location of the water, which significantly reduces the heat transfer properties of the coolant. Within
Figure 20, CTF shows an accelerated heating up of the water compared to DYN3D. This is caused by the slightly shifted power profile; however, this effect should not be as significant as the figure suggests which is partly based on the very much stretched
x-axis spanning only over 25 K. It should be noted that DYN3D has a directional change in the water temperature at ~144 cm; this is the location of the transition between fuel level one and two. It seems as if DYN3D is unable to accurately determine the temperature across this nodal boundary; this is likely to be caused by the large reduction in power across these boundary levels which causes this instability. To try and reduce this effect, both DYN3D’s internal two-phase flow method and the ASME IFC-67 thermodynamic steam tables (IFC-67 were replaced by IAPWS-IF97 in 1997 [
48]) were compared and showed very little difference with the results.
Overall, the codes are in good agreement with one another, with their only being a 4 K temperature difference in the coolant temperature, which has negligible effect on the coolant density compared to the void content.
The coupled neutronic and thermal-hydraulic performance of DYN3D on fuel assembly basis has shown to provide a high level of agreement within the critical safety parameters which have been evaluated here. Despite the purely neutronic version showing a deviation in the peak power, this has been resolved once both code suites have provided their converged fluid flow regimes. The largest deviation came from DYN3D’s coolant temperature, which showed quite a variation compared to CTF; however, the total deviation was only 4 K, which is unlikely to be significant for safety procedures. Thus, based on these results, we can claim a substantial basis of good agreement on fuel assembly level between both approaches.
5.4. Full Core Pure Neutronic Evaluation
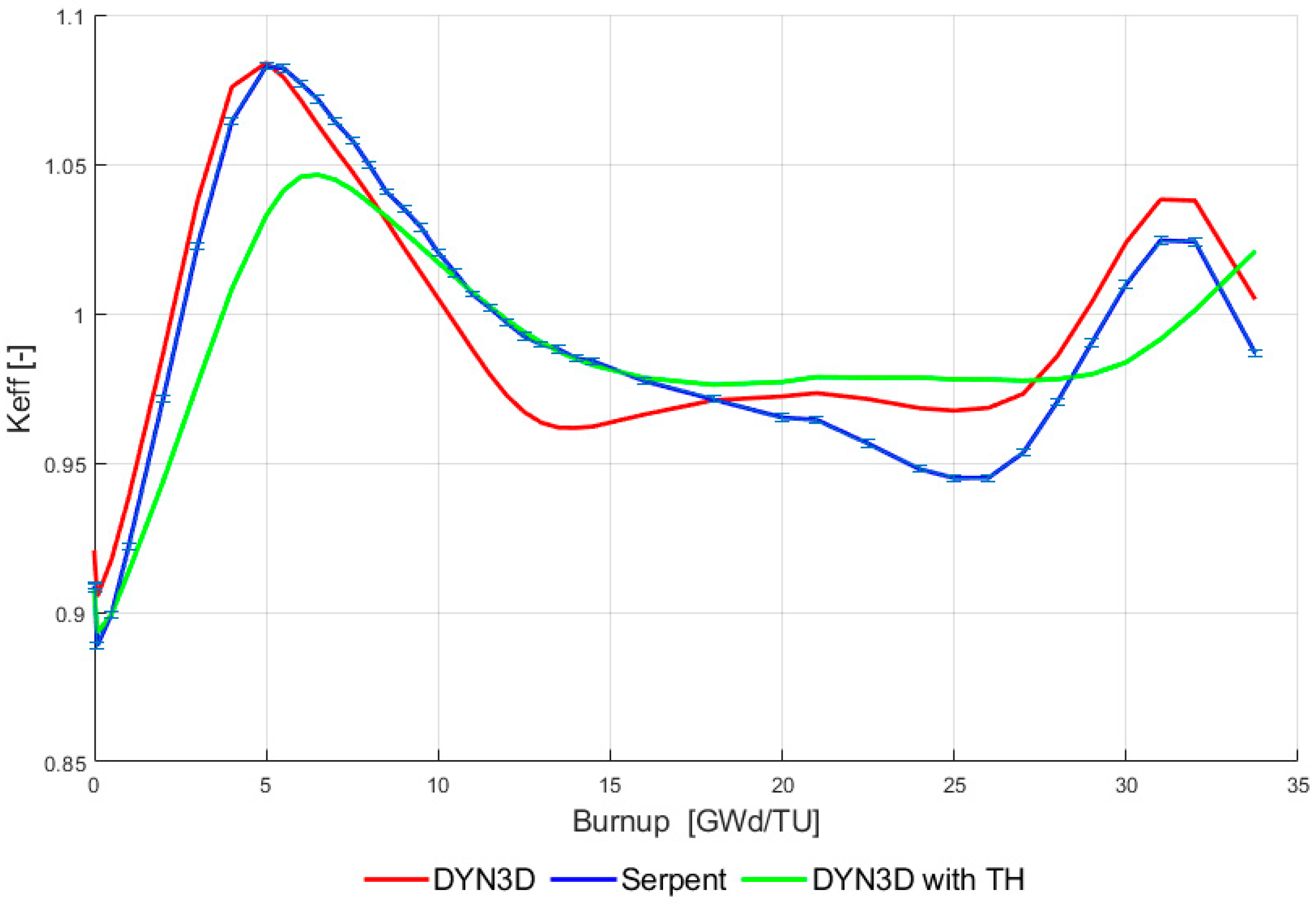
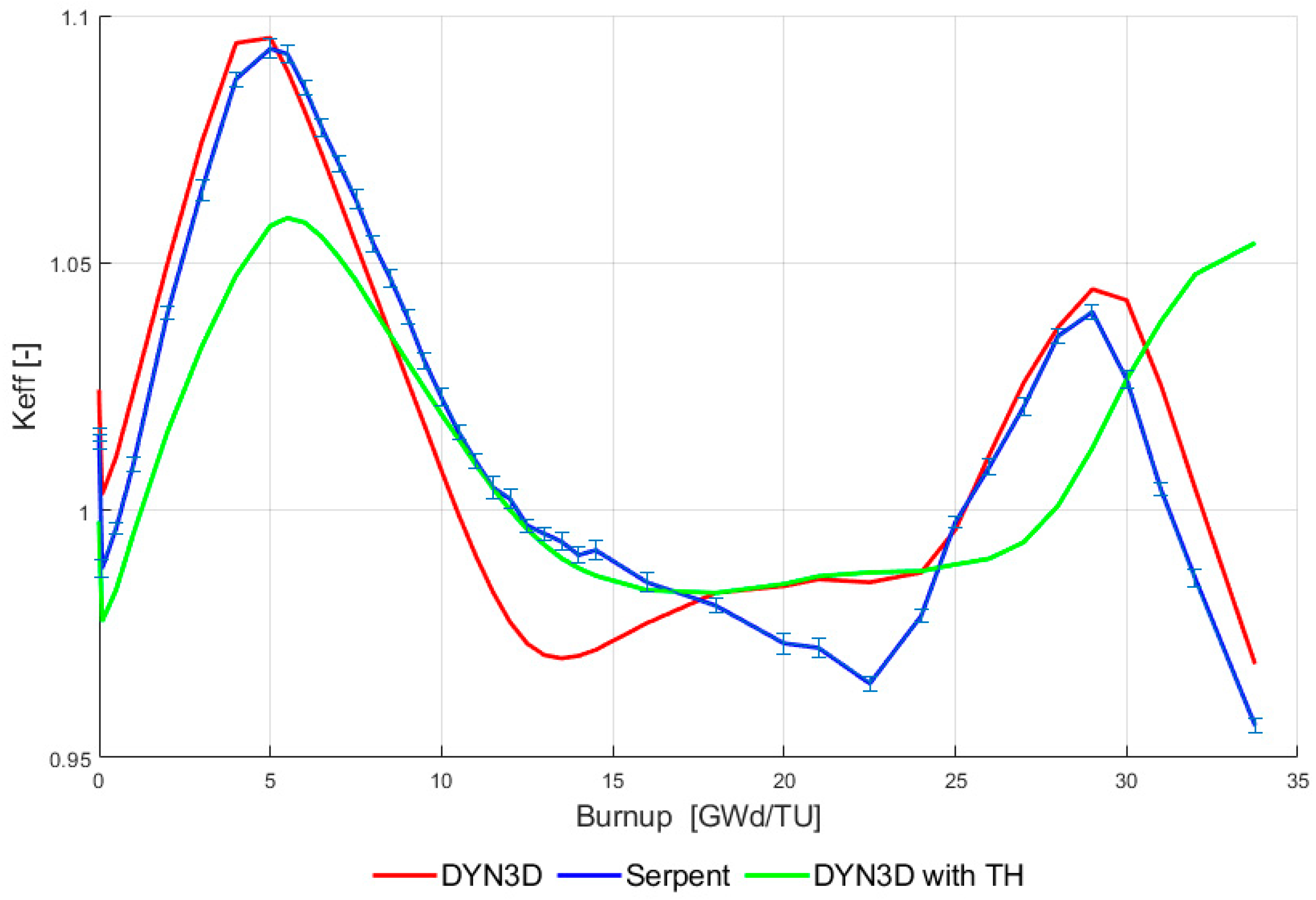
The first part of this investigation was to obtain a detailed set of assembly materials required for the full core analysis; this procedure took place by depleting both fuel assemblies to the required burnup cycle stages using a uniform fuel temperature of 900K and the benchmarked water density. This task was a non-trivial one in Serpent as each fuel pin containing gadolinium had to be subdivided into ten radial regions and all pins were axially divided into thirty regions to account for changes in radial and axial depletion. The fuel assembly multiplication factor variation with the burn-up are presented in
Figure 21 and
Figure 22. The fuel assembly burnup curve of the modelled BWR fuel assembly is significantly different to the curves regularly seen for PWR assemblies with burnable poisons. Both codes deliver comparable trends showing a first peak about 5 GWd/TU, a dip between 12 and 27 GWd/TU and a second peak around 32 GWd/TU, but with clear differences in the height of the peaks and especially in the form of the dip. To deepen the understanding of the effect of the level structure and the constant fuel temperature in neutronics a fully coupled DYN3D burnup calculation is added in orange. First, there is the initial bias which is just confirming the differences seen in
Table 6. Second, there is the strong dip in the DYN3D result around 12 to 13 GWd/TU, where the results significantly differ from the Serpent results. This seems to be an artefact of the level structure. Thirdly, there is the stretching of the whole burnup curve over time which could be an effect of the real fuel temperature and water density distribution which has typically an influence on the burnup behaviour. Finally, the proposal for a next, future step to apply a history correction [
49] in the DYN3D calculation to eliminate or reduce the effects created by the assumptions of water density and fuel temperature in the lattice calculation.
From
Figure 21 and
Figure 22 and
Table 7, the fuel assemblies k
eff across the fuel lifecycle show large discrepancies between Serpent and DYN3D; however, the trends in the curves are similar. The initial pcm deviation at day zero was earlier demonstrated to be strongly influenced by the thermal scattering library in Serpent, which is currently not available in the required setup, another cause can be in the water density averaging across the axial levels of DYN3D. This could be further reduced by adding an additional level of cross-sections to reduce the errors incorporated by the averaging process as shown before. From a modelling perspective, the additional natural uranium region on the F10 fuel pins in Serpent could account for the slight initial reduction in k
eff due to the parasitic absorption within these regions and, over time, this could see
239Pu being bred, which could account for the higher k
eff later in the cycle, but the total effect of this is unlikely to be significant. To account for this,
239Pu in the industrial methods would require more cross-section productions between levels 2 and 3, and this level would only have a minor effect on the systems’ behaviour. Similarity to the second investigation, the original water density model was used within DYN3D, which has caused an overestimation in the bottom of level two, thus depleting the uranium faster over the full burnup curve; this is likely to be the driving factor for the differences between the two softwares. Overall, the accumulated differences within the model all contribute towards the significantly different results shown by DYN3D and Serpent, which could lead to an overestimation or underestimation of the reactivity coefficient of the equilibrium core.
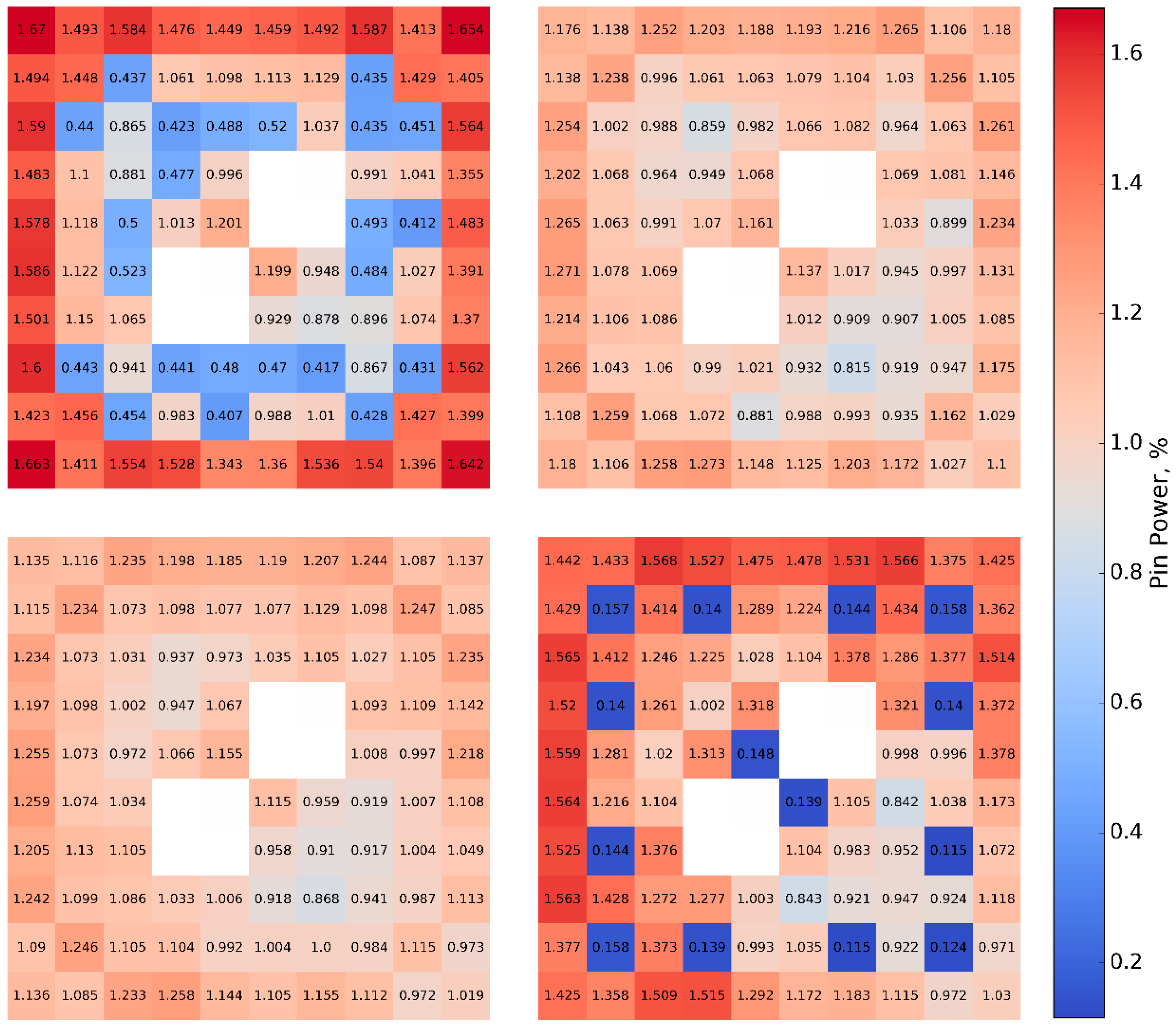
Due to the lack of symmetry within the assembly, which is created by the water holes and the assembly map, a nonsymmetrical power distribution is created which Serpent can account for, while this not possible in the nodal approach of DYN3D due to the homogenisation process. To determine the severity of this effect, the pin power profile for assembly one is determined across the burnup cycle as shown in
Figure 23. It should be noted that the supercells within the ABWR often contain cross shaped control rods between the assemblies, leading to asymmetric water gaps around each fuel assembly. If the control rods are inserted, this would cause additional power distribution imbalances, which would also be missed by nodal methods; these are likely to be more severe, yet more localised than the pin power distributions.
From
Figure 23, the fresh fuel power profile is non-symmetrical from the design of the fuel assemblies and due to the water holes, there is only corner to corner symmetry whereas with a PWR there is usually full quarter symmetry. Through the burnup procedure, the power profile becomes highly non-symmetrical; this effect becomes quite severe at 30 GWd/TU with the power in the top left and bottom right showing 40% discrepancies. To account for the non-symmetrical power distribution, SP provides the option to create ADFs for each burnup and branching steps as well as for each assembly side separately. From
Figure 23, it becomes obvious that a side ADF will produce an average boundary flux, where the true unbalance within the assembly is more corner based. Some studies have been performed to provide corner ADF’s for hexagonal assembly LWR’s [
50]; however, this study has identified that a similar treatment is likely to be beneficial for modelling BWR’s due to the highly non-symmetrical nature of the fuel assemblies. ADF’s within SP is a simplification for assemblies as SP assumes that the neighbouring assembly is of the same type as that assembly being modelled; however, this is currently the only available approach to account for the non-symmetry of the problem inside the homogenization area of a full fuel assembly. ADFs are also used for assemblies adjacent to the reflector within the full core model, for which SP has its own method of producing ADFs. It can be expected that calculation of the ADFs using, for example, two-dimensional models (i.e., super cells) can potentially lead to further improvements. However, this approach would require much higher efforts for generation of the cross-section libraries due to the larger sizes of the super cells in comparison with a single fuel assembly.
Following on from
Figure 11,
Figure 24 shows the axial power profiles for the assembly one at different burnup stages. Within the second study the axial power profile of Serpent was slightly lower than that of DYN3D and this was deemed to be due to the assumptions of the water density in the lattice calculation which is forwarded into the nodal calculation. This work has been further investigated in
Figure 24, as the depletion of the
235U will vary across each material zone axially, with this model using 30 axial depletion regions in Serpent and 26 in DYN3D. As Serpent’s power profile starts at a lower point, the materials within the lower section are depleted faster than in DYN3D and this explains the transitional discrepancies of the power profile between the burnup stages two and three within
Figure 21. The different speeds at which the power profile moves between the stages is critical for a safety analysis as these determine where the hottest pin or pin section is at any point in time. This study has identified that the pure neutronic assumptions within DYN3D and Serpent cause large variances of the speeds at which the power profiles move in BWR’s due to the high levels of axial heterogeneity within the design which are not considered within current high-fidelity methods for PWRs. To fully investigate this, a coupled high-fidelity model is required for each assembly at each burnup step to determine if these match the coupled DYN3D burnup curve which is already included within
Figure 21. This fully coupled calculation result with DYN3D is achieved using the water density as calculated through the thermal hydraulic module and the fuel temperature as calculated through the fuel rod model. These results help to deepen the understanding of the effect of the approximations which are introduced through the level structure of the lattice calculations. Overall, while the peak powers between the pure neutronic models do not differ significantly, their exact locations vary between the codes, while in all three cases the coupled solution shows reduced peaks which indicates that all results seem to be conservative. However, the identified differences between the codes does pose the question as to whether the used methods can accurately determine the time and location of the hottest pin to the required degree of accuracy through the life of a fuel assembly. This would be very helpful to justify to the quality of the safety analysis and to reduce over conservative safety margins. Nevertheless, the history of reactor operation with only very limited number of fuel failures confirms the approach used up to now as sufficiently accurate for reactor operation so long as the boundaries are not pushed to a too large extent.
The full core simulations of the ABWR were performed using Serpent’s MPI feature on the University of Liverpool’s High-Performance Computer cluster, Barkla. Due to the memory requirements the simulation used 80 Intel Xeon Gold Skylake processors. The simulation used 8M neutron populations for 1000 active cycles and 300 inactive cycles, after the fission source convergence was shown to be achieved with this configuration. The limitation of this simulation is like in other research institutes, where the queue times become significant due to other users and runtime limits for simulations are set to a maximum of three days.
The keff of the full core neutronic model in Serpent was 1.02394 (±8 pcm) which provides only a 48 pcm variation from DYN3D, despite the differences in the material compositions which shows that, in large systems, the differences can be easily overlooked due to error cancellation if only comparing a single variable. The previous steps have shown significant differences between the two softwares outputs, which would have been missed if only the keff of the full core was evaluated.
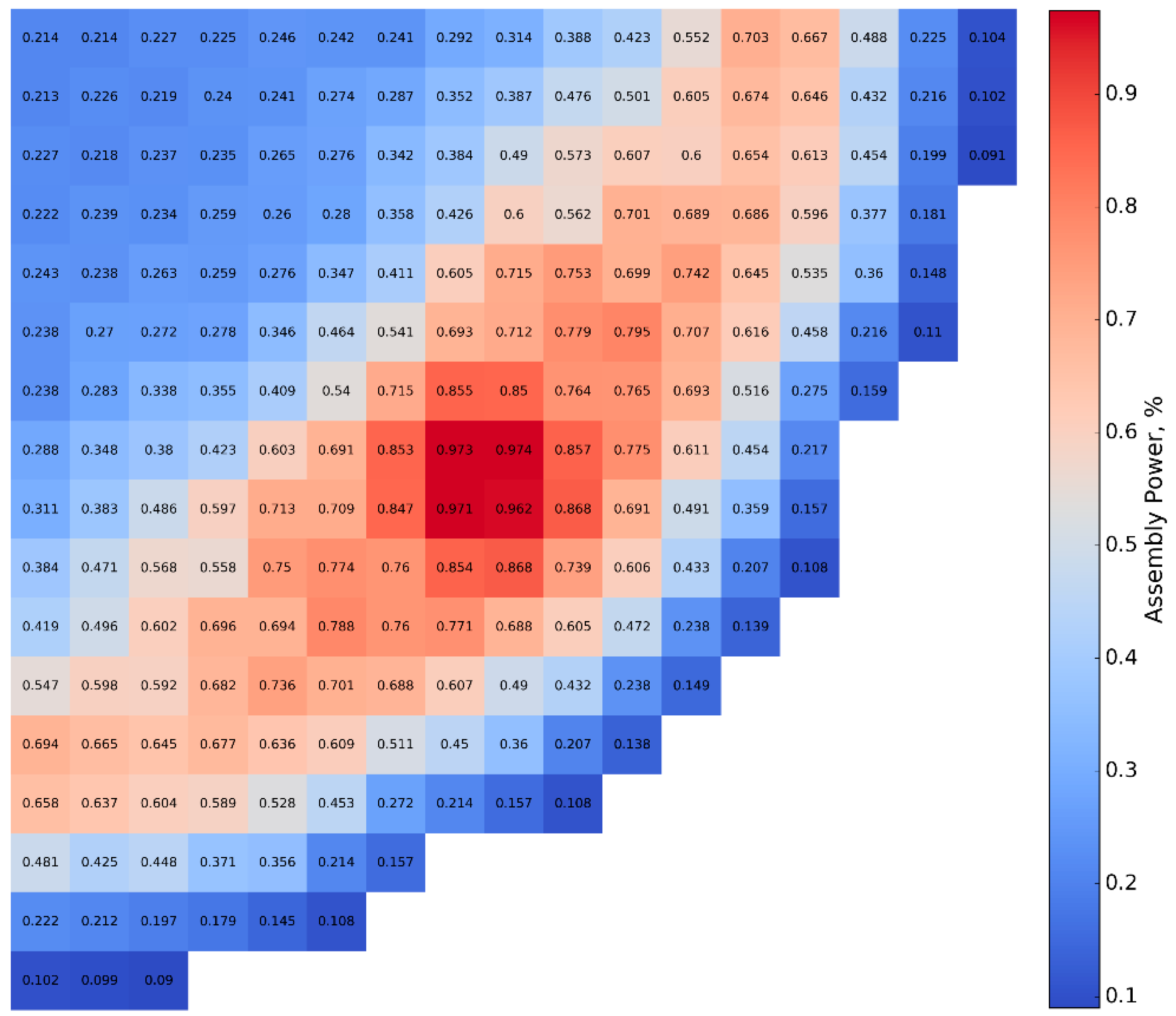
From
Figure 25 it is obvious that the power profile is not completely symmetrical with Serpent, with the top right of the figure having a slightly higher power than the opposing corner. This is due to the non-symmetrical power distribution in each fuel assembly as highlighted in
Figure 23.
Figure 26 shows the difference in each assembly power as the % of the total full core power, where the negative values represent a higher value in DYN3D compared to Serpent. Within this analysis DYN3D overestimates the highest power assemblies, which is a more conservative approach as these are the assemblies with the hottest pins. This can be explained due to DYN3D showing a larger value of k
eff for the central assemblies within the burnup stage, which implies the loading pattern provided this conservativeness and not the modelling procedure. The largest discrepancies occur near the exterior boundaries; this is within the vicinity of the assemblies where assembly burnup of 30 GWd/TU are positioned, and these have the second largest deviation in error from the assembly burnup models, and, since the evaluation is based on percentages of power, the error in low power areas is higher. It should be noted that the use of the reflector ADFs in DYN3D significantly reduced the discrepancies within the assemblies adjacent to reflector. Errors also occur within the centre of the core; this can be explained due to the largest variation burnup assembly on 10 GWd/TU being mainly positioned within this vicinity.
The radial power differences in the models can all be directly related to the input assembly compositions, a cascading effect of the modelling variances.
Figure 26 emphasises the maximum deviation in the top right to 0.05% whereas the opposing assembly is only 0.043. Overall, the purely neutronic assembly power distribution is within reasonable agreement between the two codes and both codes identified the same fuel assembly as the limiting one with the highest power.
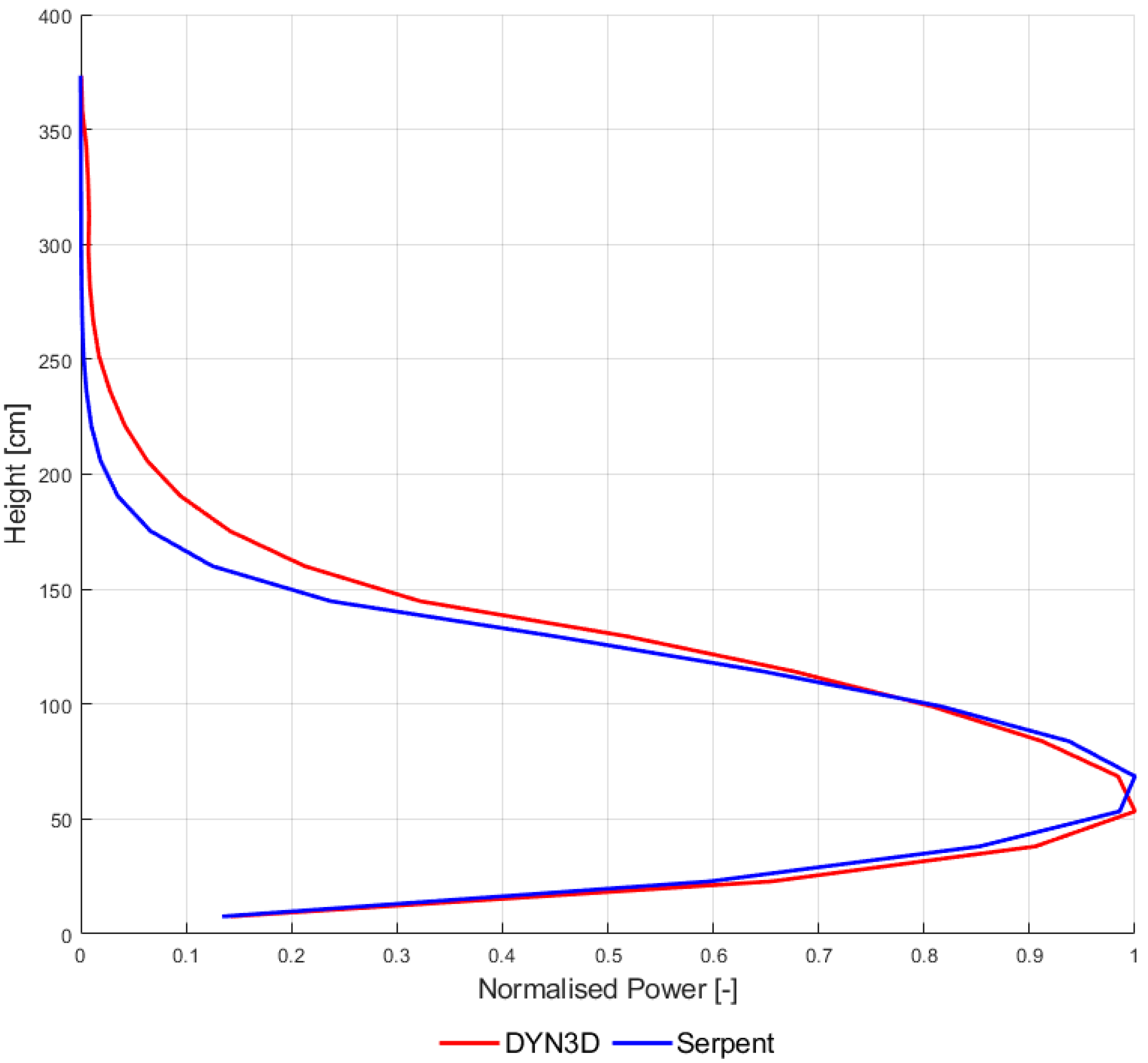
The purely neutronic normalised axial power profile is displayed within
Figure 27 and the axial shift in power is like the single assembly analysis. There are now more factors within the production of the full core axial power profile compared to
Figure 24 which has highlighted that the overall shift in power during burnup with each assembly with its burnup stage contributing towards the axial power profile. These effects of each fuel assembly are weighted to with the total power distribution per assembly shown in
Figure 25 which has determined that the highest power assemblies are in burnup stages one and two. In this stage the fuel assembly simulations show that the lowest variations in their power profiles between the software. This allows
Figure 27 to obtain the familiar shape and a good agreement between the codes; however, this could change if the core behaviour would be followed over the full cycle. Beyond the axial height of 150 cm, the power peaking shown within DYN3D is provided by the assemblies within burnup stage four, which within DYN3D will provide a higher flux at high axial points within the design. Despite this area not being critical from a safety perspective, the flux distribution is, therefore, slightly distorted due to the burnup discrepancies identified in
Figure 24.
Overall, the purely neutronic code comparison for the full core is within good agreement between the two codes within the critical areas of interest within a snapshot in time at the core start up. In this instance the hottest power pins are within assemblies in burnup stages one and two, which have almost similar power profiles. This is very much dependent on the exact burnup stage as this investigation has highlighted that DYN3D’s axial power profile lags slightly behind Serpent’s over burnup and this gives evidence to the thought that the hottest power pins further into the burnup cycle are likely to shift, which would occur at different rates between the codes. The analysis has highlighted that the detailed behaviour of both modelling methods is significantly different between the models following the initial burnup stages, which has caused an overall cascading error through the results.
5.5. Full Core Neutronic and Thermal-Hydraulic Evaluation
The coupling procedures for the iteration steps for Serpent/CTF are shown in
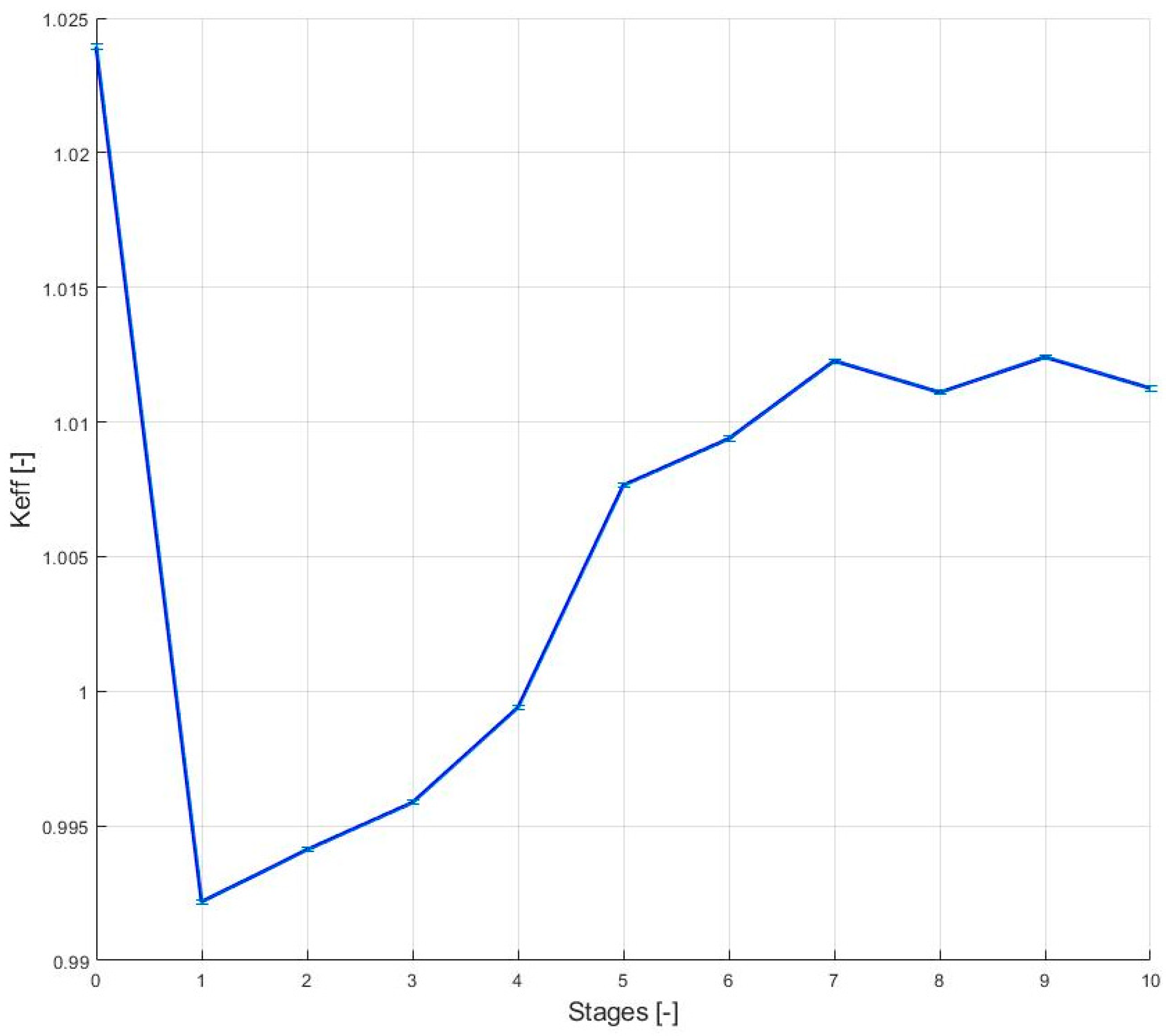
Table 8 which shows that the coupling procedure does not converge in the same manner as the single assembly with a visual representation in
Figure 28.
Up until stage four, the effective multiplication factor seems to be converging and then the results suddenly start to become unstable. The first area to determine why the system has not converged by investigating the radial power profile in Serpent, as shown in
Figure 29 which shows that following the first iteration the build-up of unsymmetrical power profiles which shifts the power to the top right of the core layout after the second iteration. The effect of this is that the highest power assemblies become less favourable to fission within stage three because of the increase Doppler broadening and the lower water density. This affect then has the exactly opposite effect on the proceeding iteration, which identifies that this is the cause of the instability of the coupling procedure. This affect is thought to be more severe than the single assembly because the water and fuel temperatures variation is much wider in the full core system compared to the single assembly. One of the drawbacks of this, is that the hottest power assembly is also obtaining higher power values per each iteration which implies that the results will be inaccurate.
Stage ten of the coupling process had the same power distribution arrangement but not as high peak values as stage four within
Figure 29. Due to convergence not being achieved, it would not be promising to go into a deeper comparison of any radial results; thus, only a short investigation will be performed on the integral values to see what has been achieved through convergence of k
eff as an integral value and to demonstrate what kind of additional information can be delivered using the fully resolved fluid dynamics with CTF.
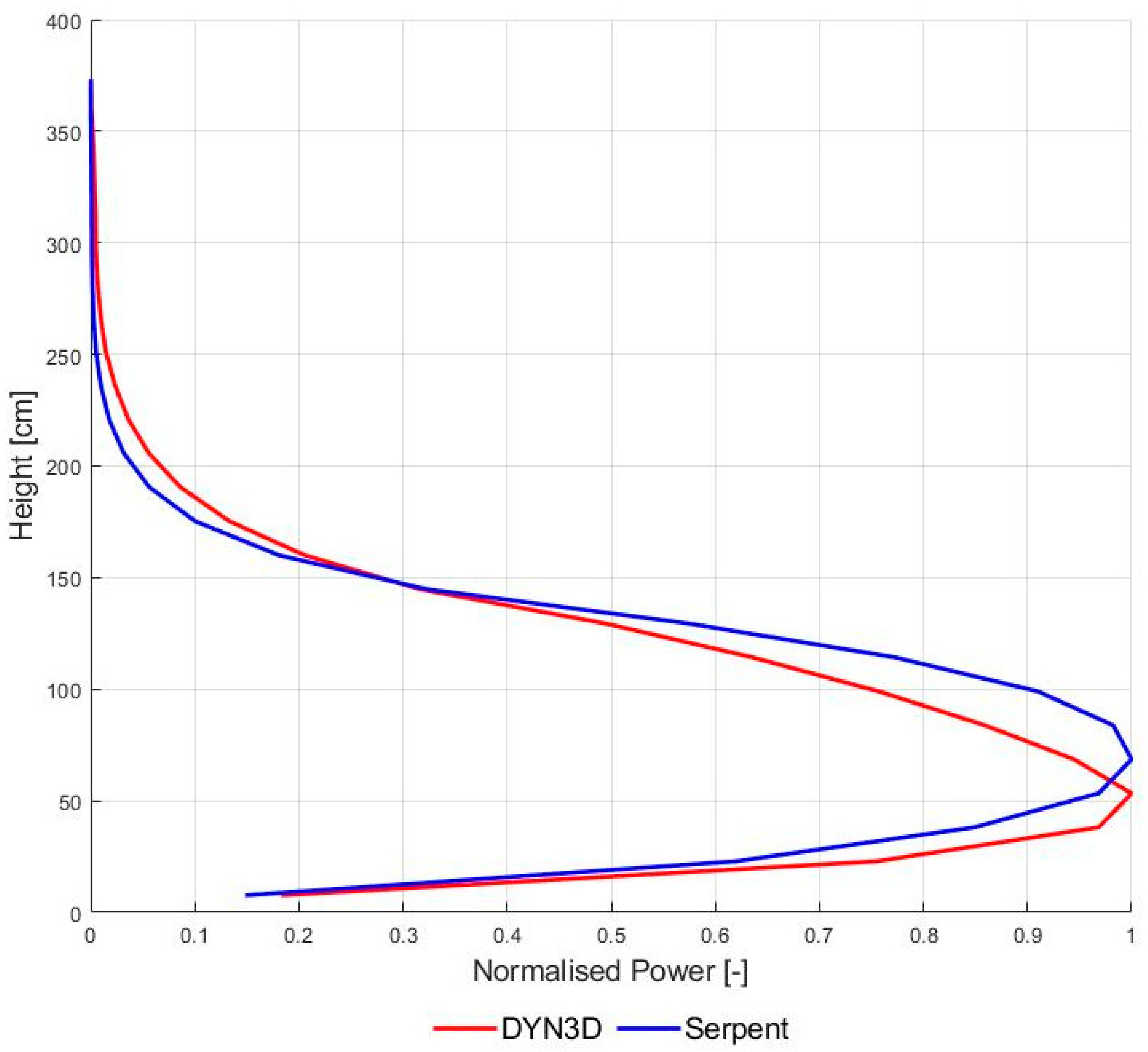
The fully coupled axial power profile comparison in
Figure 30 shows that Serpent’s higher axial profile trend continues, with Serpent having a slightly broader peak power than DYN3D, which can be explained by the 10 GWd/TU assembly power profiles power contribution.
The coupled results of the full core could not be used as a direct comparison due to the not achieved convergence on the coupled high-fidelity solver. However, this section has shown that the input material compositions of the equilibrium core varied significantly between the two codes which implies that even at the start of life there is a difference between DYN3D and Serpent to be expected. This could be investigated further by reducing the number of variables between the models to determine the main cause; however, this study has highlighted that the most likely cause is due to the different water density representation used within the different codes. Further analysis is required with regard to how to best apply high-fidelity methods with BWRs, where the lack of symmetry and high levels of heterogeneity have shown on a full core level that these could have significant implications for the long-term operation of the design and its fuel assemblies and following the potential for further optimisation of BWR fuel assembly design and the related operation.
5.6. Discussion of Possible Ways to Improve the Results
As it was demonstrated in the previous sections, the results of the currently applied industrial techniques can have significant discrepancies in comparison with the high-fidelity coupled neutronics-thermal hydraulics simulations. Undoubtedly, the results of the industrial codes used in present study can be further improved by applying more advanced techniques for ADF generation or, for example, application of the SPH factors (which were not used in the current study) or the combination of both mentioned techniques. However, all these techniques would require additional significant investments into the developing of the appropriate computational models, verification and validation and will not overcome the limit of nodal codes delivering only coarse mesh results instead of fuel pin related data. Therefore, this way can become computationally expensive and not so attractive for application by industry since it will still require the offline pin power reconstruction.
To overcome mentioned above limitations, another approach can be proposed. As it has been demonstrated in the present study, high fidelity coupled pin-by-pin neutronics and thermal hydraulic simulations can be very interesting, but unfortunately costly and difficult to implement and use in day-to-day industrial work. Therefore, another method was proposed [
51,
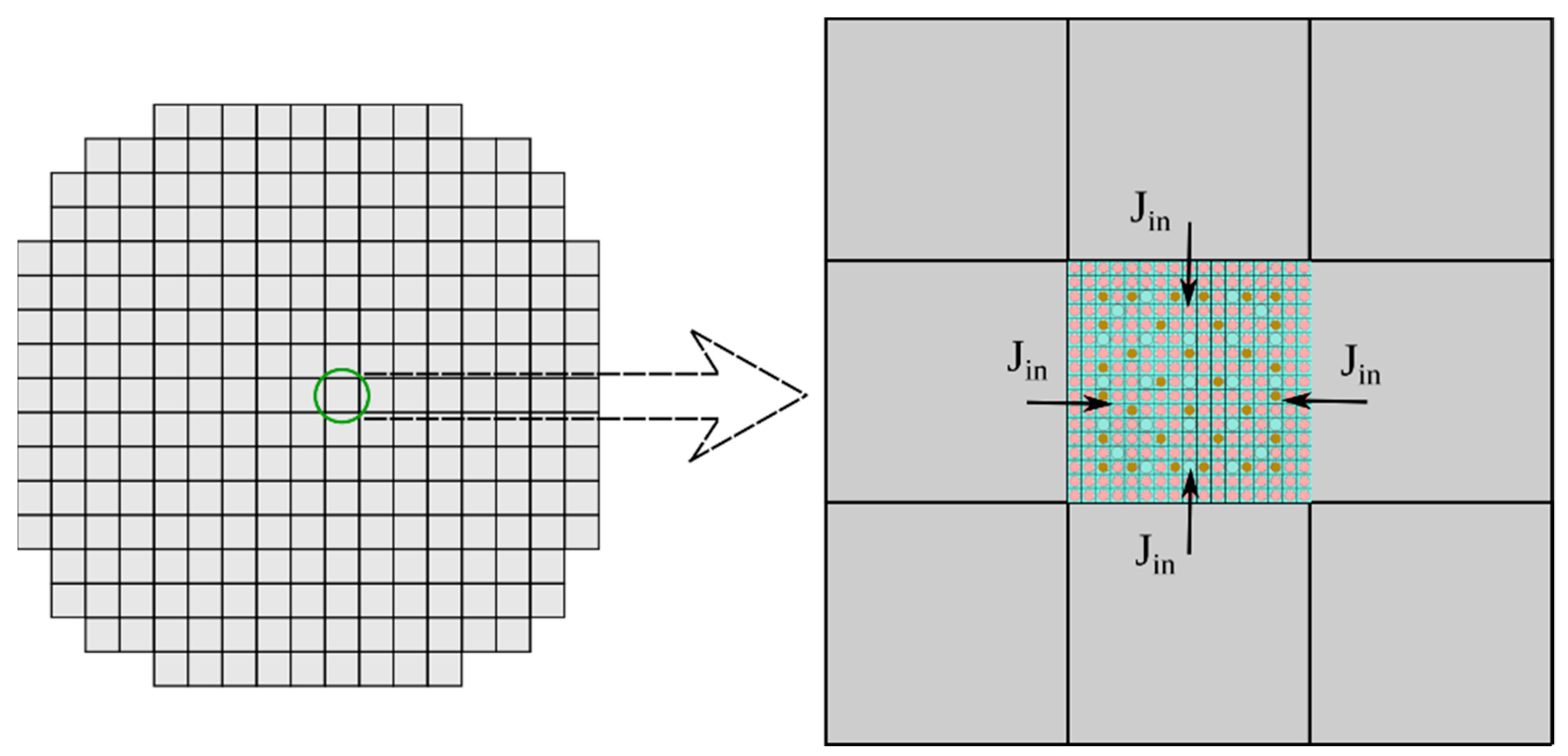
52] to overcome these challenges while keeping the computational time on the level acceptable for industrial application. In this technique, high fidelity methods would be applied only to the assemblies where high errors are expected (for example, assemblies adjusting to the reflector or control rods) or the highest loads will be needed to determine safety parameters. These assemblies could be resolved down to the pin level (using the boundary conditions from the full core nodal solution), while the fuel assemblies in the less challenging surrounding (i.e., central assemblies) would be still simulated on the nodal level. The idea of this approach is schematically shown in
Figure 31.
Considering the multi physics nature of the reactor simulations, the application of the Monte Carlo codes as a neutronics solver is expected to still be time consuming even when applied on the level of a single assembly. Therefore, less general but faster neutron transport solvers should be used for this task (see, for example, [
53,
54]) and coupled to thermal hydraulics solvers. This approach, in our view, has strong potential to resolve the problems outlined in the present study without involvement of the ADF and SPH factors and other approximations aiming to reduce the naturally inherent error in diffusion approximation.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






























