
Research on the Speed Sliding Mode Observation Method of a Bearingless Induction Motor


Abstract
:1. Introduction
2. Mathematical Model of Sliding Mode Observer for a BL-IM
2.1. SMO Models of Stator Current and Rotor Flux-Linkage
2.2. SMO Model of Motor Speed
2.3. Stability Analysis of Sliding Mode Observer
3. Speed Sensorless Inverse DDC System of a BL-IM
4. Simulation Analysis of BL-IM Speed Sensorless Control System
- (1)
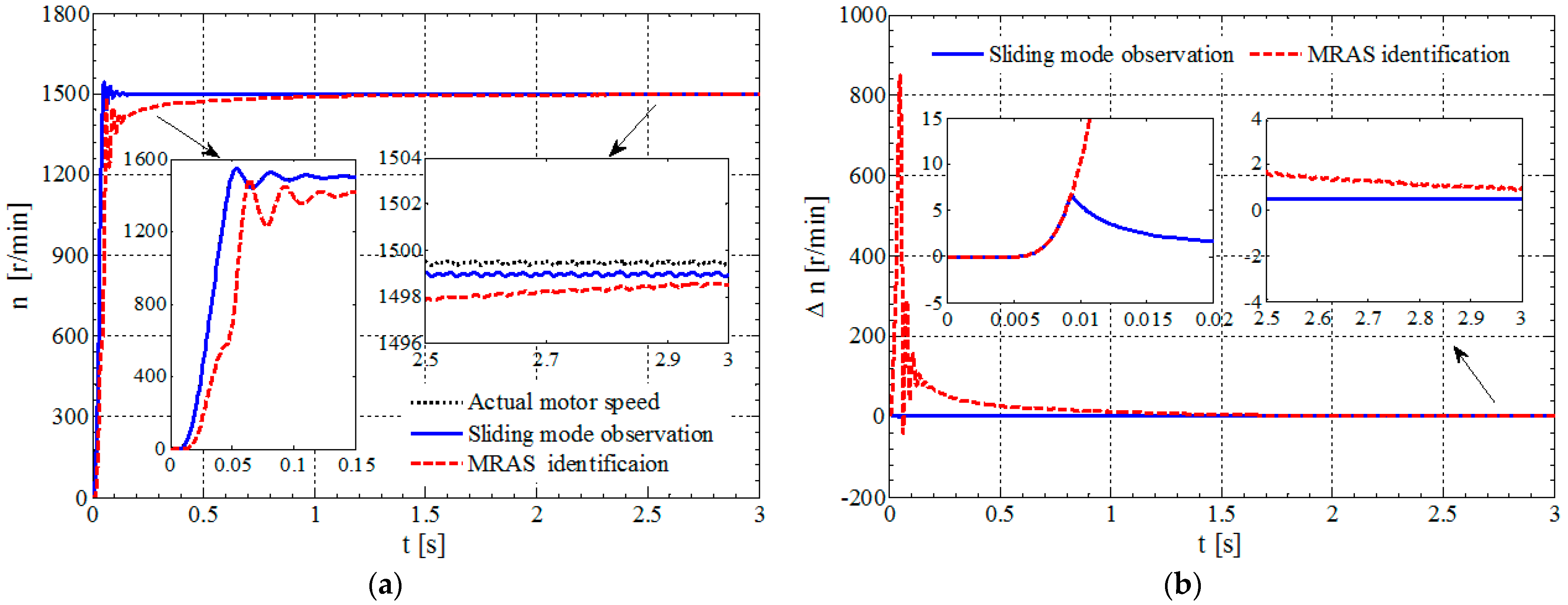
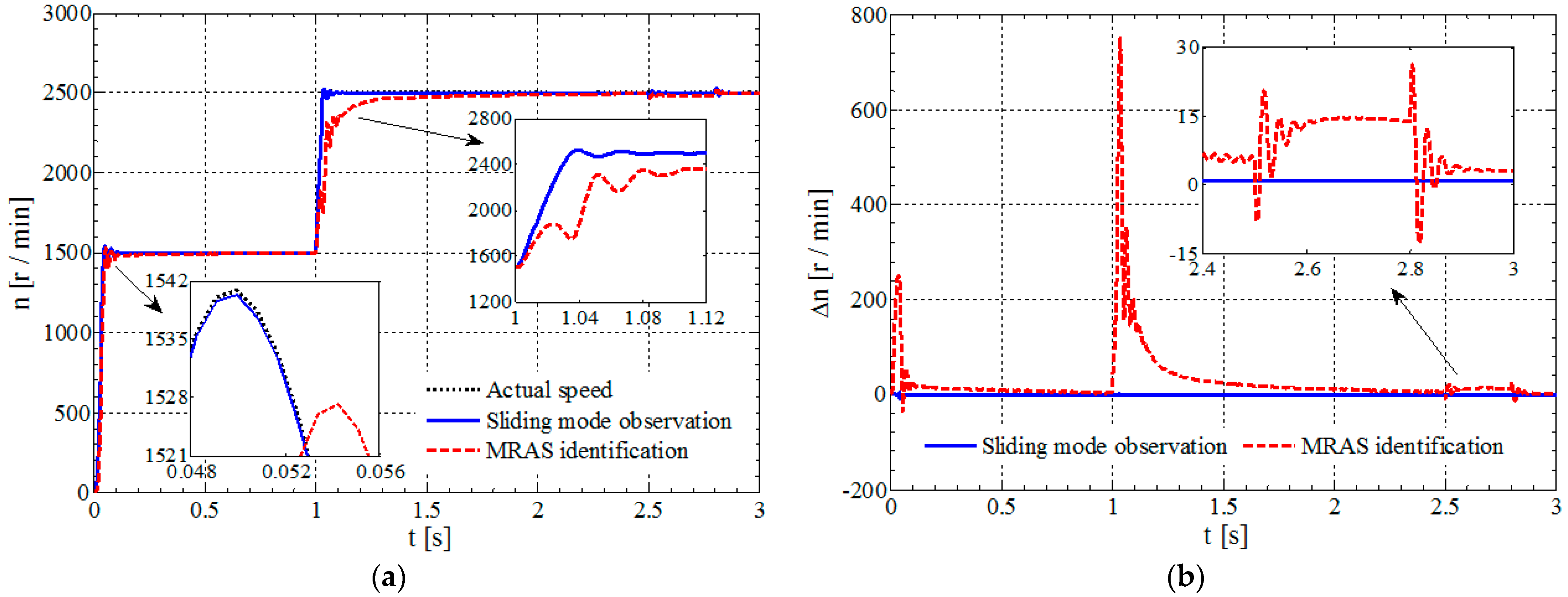
- During the no-load start-up of a BL-IM, if the MRAS speed identification method is used, the observed speed reaches its peak value at 0.07 s, its rising speed is lower than the actual starting speed, the maximum dynamic tracking error is about 800 r/min; while if the proposed motor speed SMO method is used, the observed motor speed basically change synchronously with the actual motor speed, it reaches the peak value at 0.05 s, and the maximum dynamic tracking error is about 6 r/min. Therefore, compared with the MRAS speed identification method, the proposed motor speed SMO method can track the actual motor speed in a more timely manner at the moment of no-load starting, and obtain higher real-time observation performance and dynamic tracking performance.
- (2)
- After the BL-IM system starts with no load and enters into steady state, if the MRAS speed identification method is used, the steady-state observation error is about 1.5 r/min; while if the motor speed SMO method is used, the steady-state observation error is about 0.5 r/min. Therefore, compared with the MRAS Speed identification method, the proposed motor speed SMO method can obviously improve the steady-state observation accuracy.
- (1)
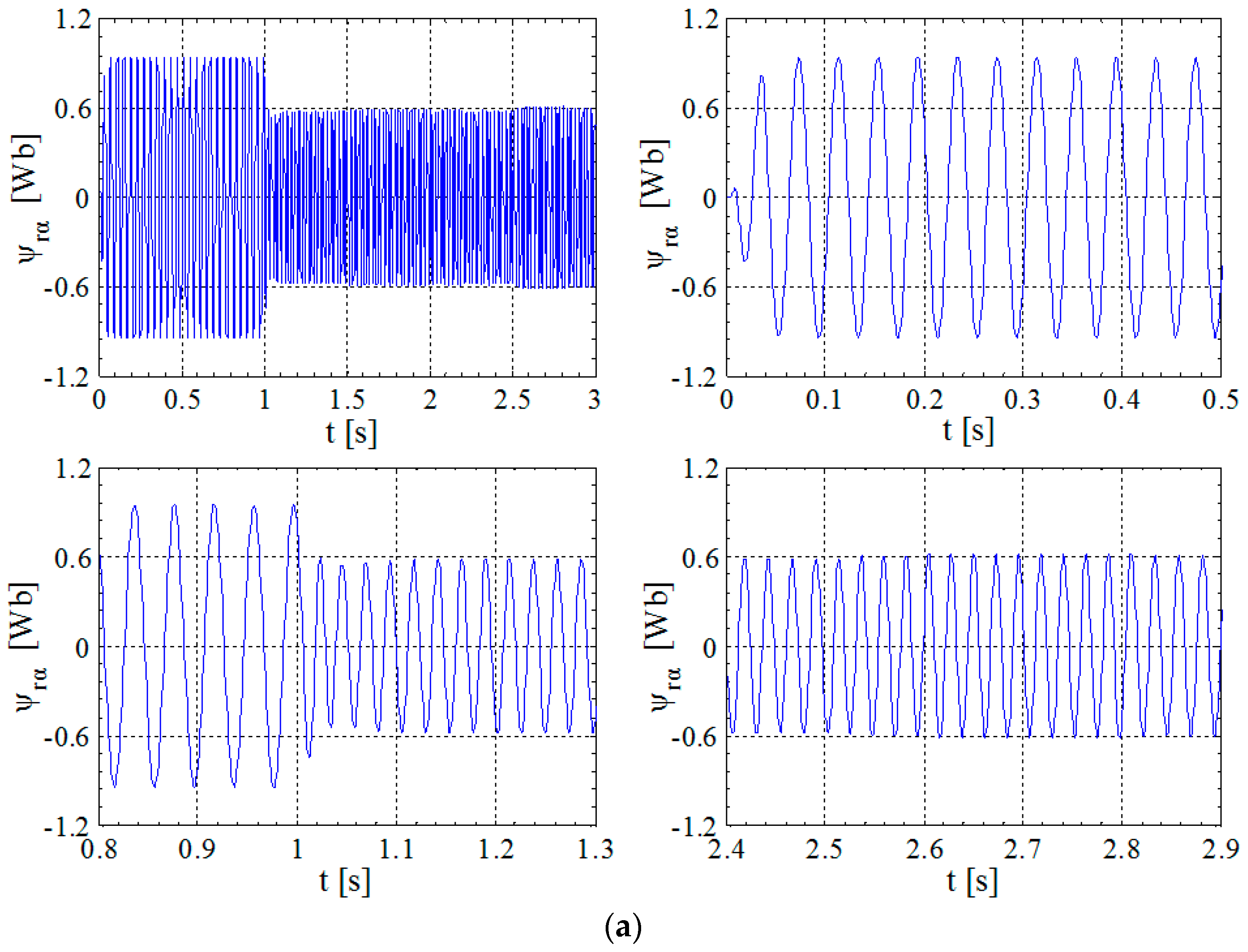
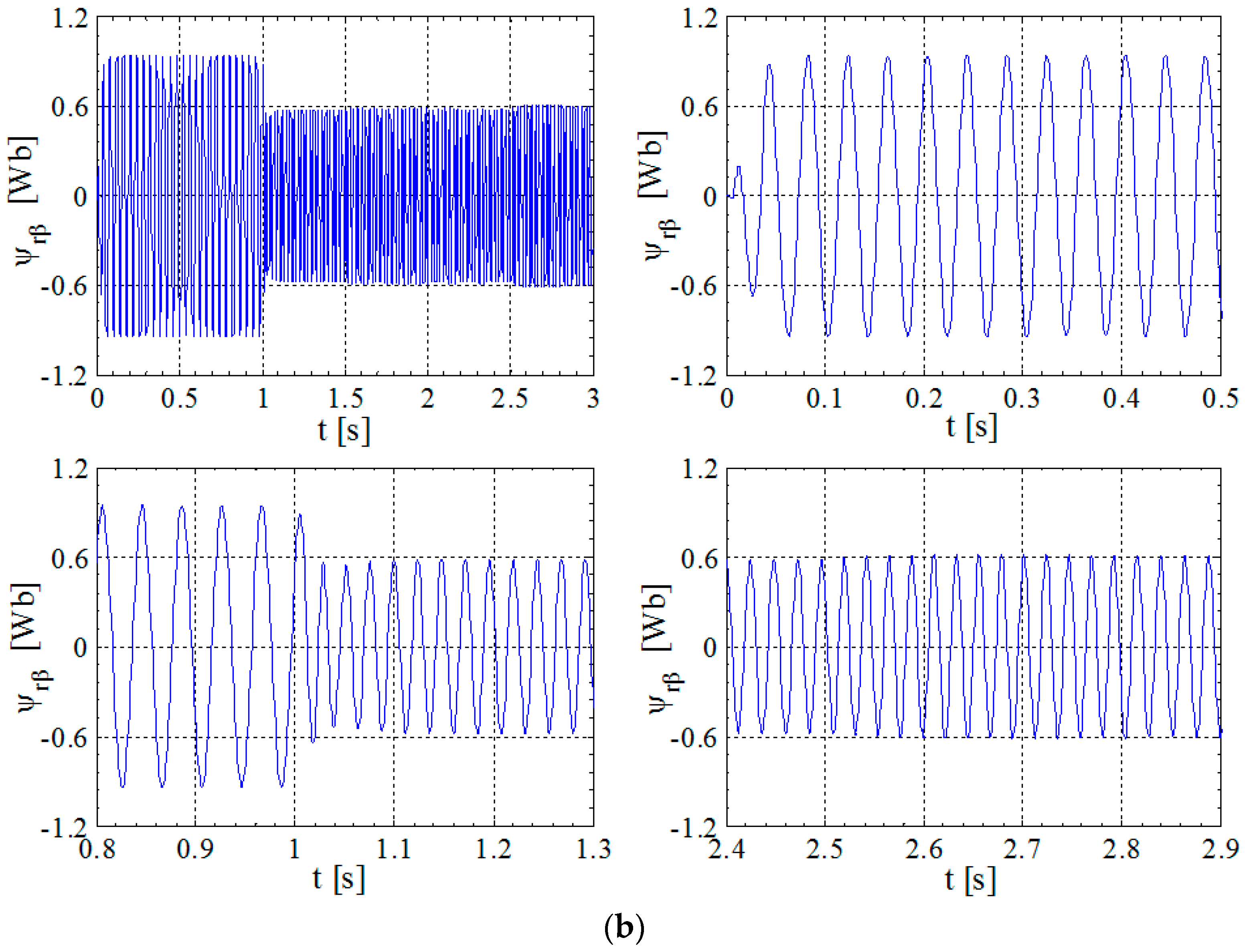
- At the sudden change moment of motor speed, a transient rotor flux-linkage observation error of about 0.3 Wb appears. At the moment of load sudden change, the rotor flux-linkage fluctuation with an amplitude of 0.04 Wb appears. However, under the action of the BL-IM inverse DDC system, the transient observation error is quickly suppressed and reduced to near zero.
- (2)
- In steady state, the observation error of rotor flux-linkage is always kept within 0.02 Wb (i.e., within the steady-state error range of about ±2.1%). The high observation accuracy of rotor flux-linkage ensures the stable suspension operation of a BL-IM system.
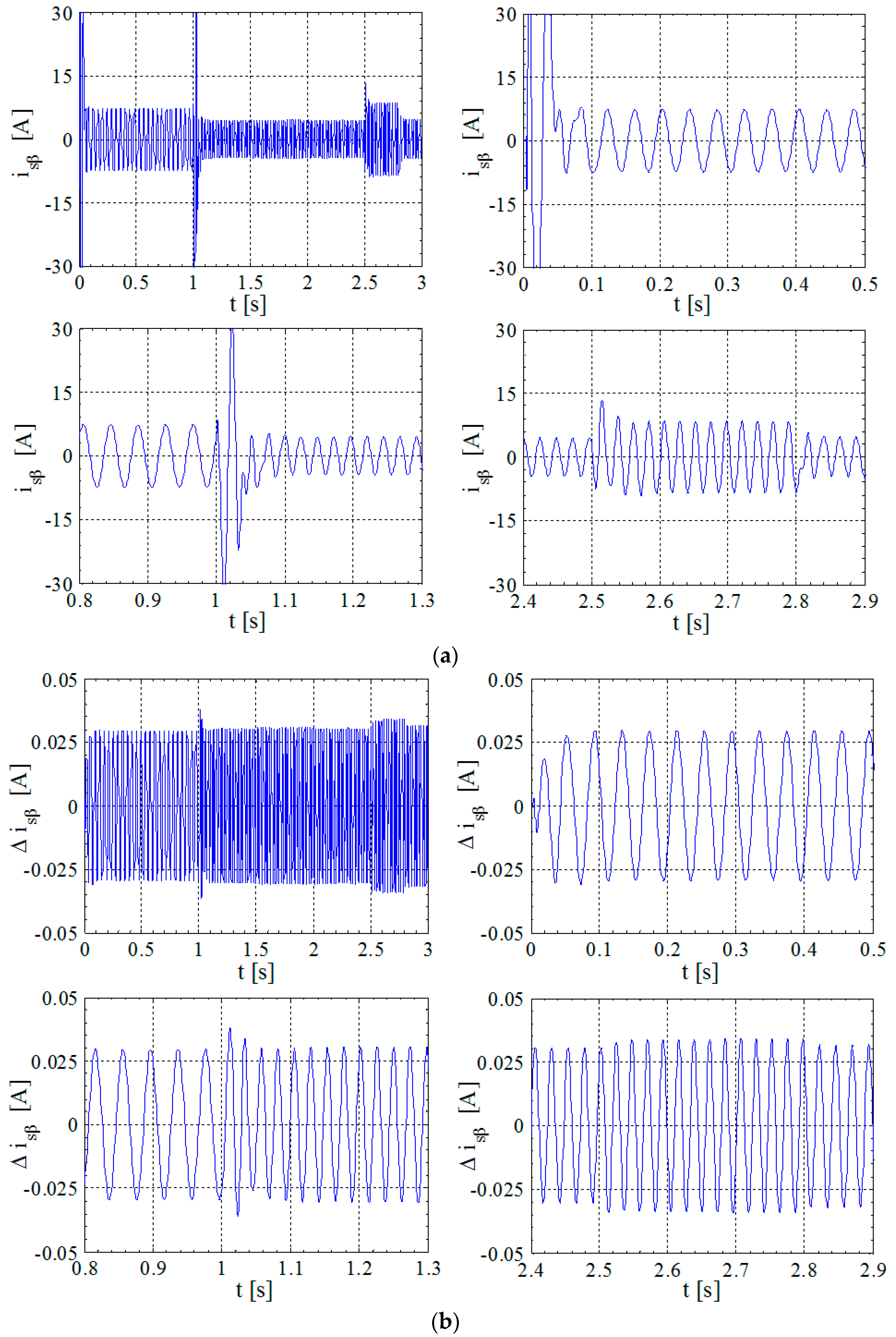
- (1)
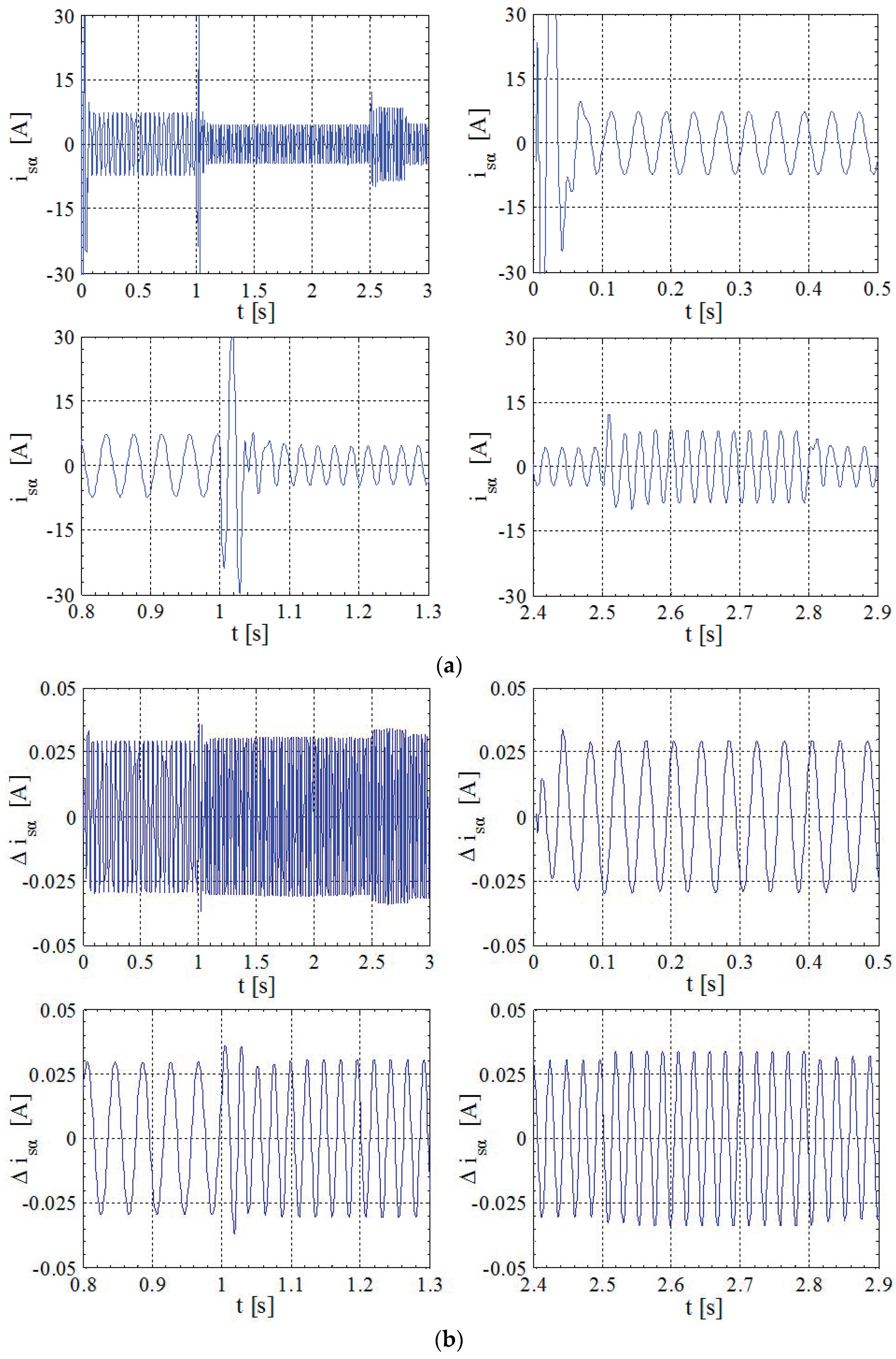
- Regardless of the process of motor starting or that of speed regulation, the stator current error is always within 0.03 A.
- (2)
- The high-precision observation of stator current and rotor flux-linkage provides a guarantee for the high-precision sliding mode observation of motor speed, and also shows the reliability of the proposed SMO method.
- (1)
- Under the speed sensorless conditions, when the motor speed suddenly changes, the stator current of the torque system can respond immediately to produce the required electromagnetic torque; the rotor flux-linkage subsystem only produces about 0.3 wb fluctuation, which is suppressed instantaneously; the displacement components are basically not affected.
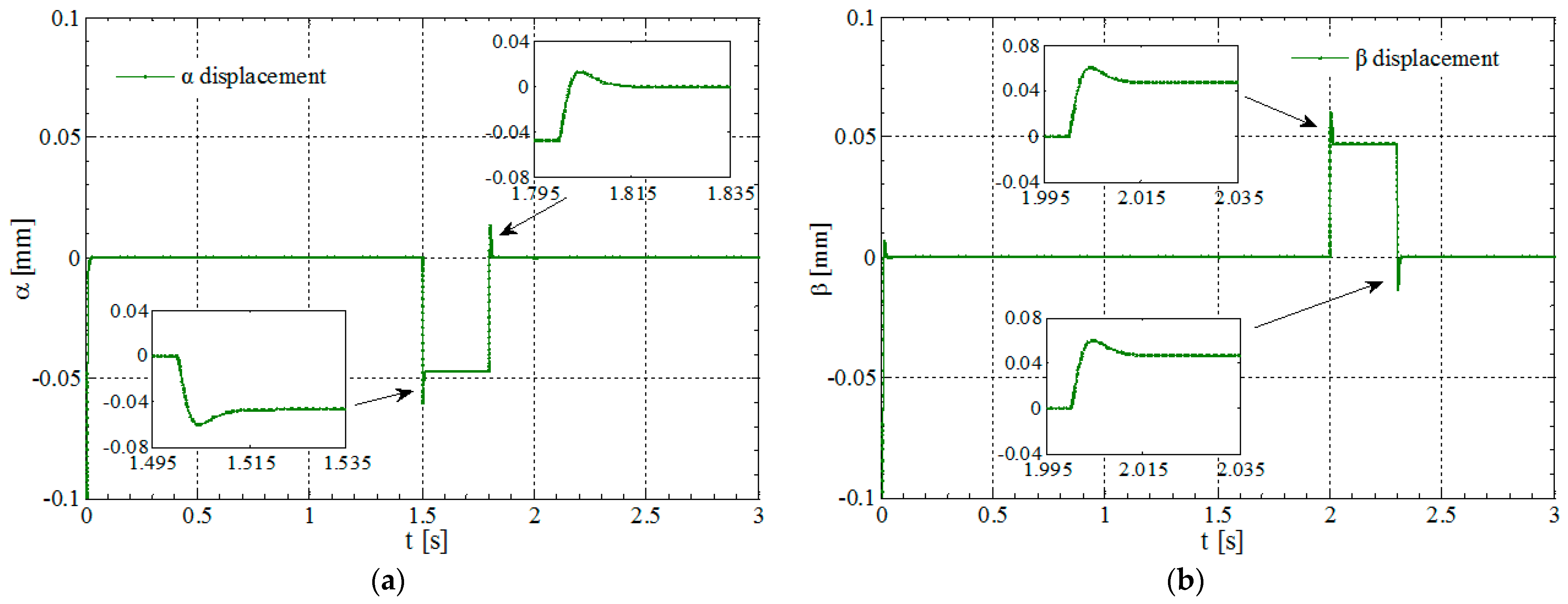
- (2)
- Under the speed sensorless conditions, when any one of the two radial displacement components changes suddenly, the stator current, rotor flux-linkage, and motor speed of the torque system are basically not affected. At the same time, there is no coupling phenomena between the two displacement components.
- (3)
- After the speed sensor is displaced by the speed sliding mode observer and the observed motor speed, rotor flux-linkage is used in the BL-IM’s inverse DDC system. The BL-IM system not only achieves stable magnetic suspension operation, but also achieves almost the same DDC performance as when the speed sensor is used [25,28]. That is to say, the speed sensorless vector control can be achieved when the proposed speed SMO method is applied to a BL-IM system.
5. Conclusions
- (1)
- Compared with the MRAS speed identification method, whether in the process of no-load starting, or in that of load mutation and speed regulation, the proposed SMO method can realize the real-time observation or dynamic tracking of motor speed in a more timely manner and more accurately, and can effectively reduce the observation error of steady-state motor speed and improve the steady-state observation accuracy of motor speed.
- (2)
- On the basis of the inverse DDC system of a BL-IM and the proposed motor speed SMO method, when the observed motor speed and rotor flux-linkage are used as the feedback signals of corresponding closed loops, the stable magnetic suspension operation can be realized, and the good DDC performance between motor speed, rotor flux-linkage, and two radial displacement components can be achieved.
- (3)
- The proposed sliding mode observer is effective and feasible, and can be used to replace the speed sensor in a BL-IM system to achieve the stable speed sensorless magnetic suspension operation with high performance.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
List of Acronyms
| AC | Alternating current |
| BLM | Bearingless motor |
| BL-IM | Bearingless induction motor |
| MRAS | Model reference adaptive system |
| EKF | Extended Kalman filter |
| ICDKF | Iterative center difference Kalman filter |
| HFSI | High frequency signal injection |
| ANN | Artificial neural network |
| SMO | Sliding mode observation |
| DDC | Dynamic decoupling control |
References
- Chiba, A.; Fukao, T.; Ichkawa, O.; Oshima, M.; Takemoto, M.; Dorrell, D.G. Magnetic Bearings and Bearingless Drives; Newnes: Tokyo, Japan, 2005. [Google Scholar]
- Wang, X.; Zhang, Y.; Gao, P. Design and Analysis of Second-Order Sliding Mode Controller for Active Magnetic Bearing. Energies 2020, 13, 5965. [Google Scholar] [CrossRef]
- Cheng, X.; Cheng, B.-X.; Deng, S.; Zhou, R.-G.; Lu, M.-Q.; Wang, B. State-feedback decoupling control of 5-DOF magnetic bearings based on α-order inverse system. Mechatronics 2020, 68, 102358. [Google Scholar] [CrossRef]
- Murakami, I.; Mori, H.; Shimizu, M.; Quan, N.M.; Ando, Y. Study on rigidity of the superconducting magnetic bearing. Int. J. Appl. Electromagn. Mech. 2019, 59, 191–200. [Google Scholar] [CrossRef]
- Sun, X.; Su, B.; Chen, L.; Yang, Z.; Xu, X.; Shi, Z. Precise control of a four degree-of-freedom permanent magnet biased active magnetic bearing system in a magnetically suspended direct-driven spindle using neural network inverse scheme. Mech. Syst. Signal Process. 2017, 88, 36–48. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Wan, L.; Sun, X.; Li, F.; Chen, L. Sliding Mode Variable Structure Control of a Bearingless Induction Motor Based on a Novel Reaching Law. Energies 2016, 9, 452. [Google Scholar] [CrossRef] [Green Version]
- Chiba, A.; Furuichi, R.; Aikawa, Y.; Shimada, K.; Takamoto, Y.; Fukao, T. Stable Operation of Induction-Type Bearingless Motors Under Loaded Conditions. IEEE Trans. Ind. Appl. 1997, 33, 919–924. [Google Scholar] [CrossRef]
- Bu, W.S.; Li, Z.Y. LS-SVM Inverse System Decoupling Control Strategy of Bearingless Induction Motor Considering Stator Cur-rent Dynamics. IEEE Access 2019, 7, 132130–132139. [Google Scholar] [CrossRef]
- Hiromi, T.; Katou, T.; Chiba, A.; Rahman, M.A.; Fukao, T. A Novel Magnetic Suspension-Force Compensation in Bearingless Induction-Motor Drive with Squirrel-Cage Rotor. IEEE Trans. Ind. Appl. 2007, 43, 66–76. [Google Scholar] [CrossRef]
- Zhu, Z.; Zhu, J.; Guo, X.; Jiang, Y.; Sun, Y. Numerical Modeling of Suspension Force for Bearingless Flywheel Machine Based on Differential Evolution Extreme Learning Machine. Energies 2019, 12, 4470. [Google Scholar] [CrossRef] [Green Version]
- Sun, X.; Jin, Z.; Wang, S.; Yang, Z.; Li, K.; Fan, Y.; Chen, L. Performance improvement of torque and suspension force for a novel five-phase BFSPM machine for flywheel energy storage systems. IEEE Trans. Appl. Supercond. 2019, 29, 1–4. [Google Scholar] [CrossRef]
- Bu, W.; Zhang, X.; Qiao, Y.; Li, Z.; Zhang, H. Equivalent two-phase mutual inductance model and measurement algorithm of three-phase bearingless motor. Trans. Inst. Meas. Control. 2016, 40, 630–639. [Google Scholar] [CrossRef]
- Yang, Z.; Ji, J.; Sun, X.; Zhu, H.; Zhao, Q. Active Disturbance Rejection Control for Bearingless Induction Motor Based on hyperbolic tangent tracking differentiator. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 2623–2633. [Google Scholar] [CrossRef]
- Sun, X.; Shi, Z.; Chen, L.; Yang, Z. Internal Model Control for a Bearingless Permanent Magnet Synchronous Motor Based on Inverse System Method. IEEE Trans. Energy Convers. 2016, 31, 1539–1548. [Google Scholar] [CrossRef]
- Bu, W.; Tu, X.; Lu, C.; Pu, Y. Adaptive feedforward vibration compensation control strategy of bearingless induction motor. Int. J. Appl. Electromagn. Mech. 2020, 63, 199–215. [Google Scholar] [CrossRef]
- Sun, X.; Su, B.; Wang, S.; Yang, Z.; Lei, G.; Zhu, J.; Guo, Y. Performance Analysis of Suspension Force and Torque in an IBPMSM with V-Shaped PMs for Flywheel Batteries. IEEE Trans. Magn. 2018, 54, 1–4. [Google Scholar] [CrossRef]
- Yang, Z.; Wan, L.; Sun, X.; Chen, L.; Chen, Z. Sliding Mode Control for Bearingless Induction Motor Based on a Novel Load Torque Observer. J. Sens. 2016, 2016, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Yang, Y.; Liu, Z. Theoretical analysis and simulation of single-winding bearingless switched reluctance generator with wider rotor teeth. Int. J. Appl. Electromagn. Mech. 2018, 56, 387–398. [Google Scholar] [CrossRef]
- Bu, W.; He, F.; Li, Z.; Zhang, H.; Shi, J. Neural Network Inverse System Decoupling Control Strategy of BLIM Considering Stator Current dynamics. Trans. Inst. Meas. Control 2019, 41, 621–630. [Google Scholar] [CrossRef]
- Yang, Z.; Ding, Q.; Sun, X.; Ji, J.; Zhao, Q. Design and analysis of a novel wound rotor for a bearingless induction motor. Int. J. Electron. 2019, 106, 1829–1844. [Google Scholar] [CrossRef]
- Sun, X.; Chen, L.; Jiang, H.; Yang, Z.; Chen, J.; Zhang, W. High-Performance Control for a Bearingless Permanent-Magnet Synchronous Motor Using Neural Network Inverse Scheme Plus Internal Model Controllers. IEEE Trans. Ind. Electron. 2016, 63, 3479–3488. [Google Scholar] [CrossRef]
- Wang, H.; Li, F. Design Consideration and Characteristic Investigation of Modular Permanent Magnet Bearingless Switched Reluctance Motor. IEEE Trans. Ind. Electron. 2019, 67, 4326–4337. [Google Scholar] [CrossRef]
- Bu, W.; Chen, Y.; Zu, C. Stator flux orientation inverse system decoupling control strategy of bearingless induction motor considering stator current dynamics. IEEJ Trans. Electr. Electron. Eng. 2019, 14, 640–647. [Google Scholar] [CrossRef]
- Sun, Y.; Tang, J.; Xu, P. Design of a Bearingless Outer Rotor Induction Motor. Energies 2017, 10, 705. [Google Scholar] [CrossRef] [Green Version]
- Bu, W.; Zhang, X.; He, F. Sliding mode variable structure control strategy of bearingless induction motor based on inverse system decoupling. IEEJ Trans. Electr. Electron. Eng. 2018, 13, 1052–1059. [Google Scholar] [CrossRef]
- Yang, Z.; Chen, X.; Sun, X.; Bao, C.; Lu, J. Rotor radial disturbance control for a bearingless induction motor based on improved active disturbance rejection control. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2019, 38, 138–152. [Google Scholar] [CrossRef]
- Ye, X.; Yang, Z.; Zhang, T. Modelling and performance analysis on a bearingless fixed-pole rotor induction motor. IET Electr. Power Appl. 2019, 13, 251–258. [Google Scholar] [CrossRef]
- Bu, W.; Li, B.; He, F.; Li, J. Inverse system decoupling sliding mode control strategy of bearingless induction motor considering current dynamics. Int. J. Appl. Electromagn. Mech. 2019, 60, 63–78. [Google Scholar] [CrossRef]
- Beck, M.; Naunin, D. A new method for the calculation of the slip frequency for a sensorless speed control of a squirrel-cage induction motor. In Proceedings of the IEEE Power Electronics Specialists Conference, Toulouse, France, 24–28 June 1985; pp. 678–683. [Google Scholar]
- Zhong, Z.F.; Jin, M.J.; Shen, J.X. Full Speed Range Sensorless Control of Permanent Magnet Synchronous Motor with Phased PI Regulator-Based Model Reference Adaptive System. Proc. Chin. Soc. Electr. Eng. 2018, 38, 1203–1211. [Google Scholar]
- Yildiz, R.; Barut, M.; Zerdali, E. A Comprehensive Comparison of Extended and Unscented Kalman Filters for Speed-Sensorless Control Applications of Induction Motors. IEEE Trans. Ind. Inform. 2020, 16, 6423–6432. [Google Scholar] [CrossRef]
- Orlowska-Kowalska, T.; Korzonek, M.; Tarchala, G. Stability Improvement Methods of the Adaptive Full-Order Observer for Sensorless Induction Motor Drive—Comparative Study. IEEE Trans. Ind. Inform. 2019, 15, 6114–6126. [Google Scholar] [CrossRef]
- Qin, F.; He, Y.-K.; Liu, Y.; Zhang, W. Comparative investigation of sensorless control with two high-frequency signal injection schemes. Proc. Chin. Soc. Electr. Eng. 2005, 25, 116–121. [Google Scholar]
- Shi, H.-Y.; Feng, Y. High-order Terminal Sliding Mode Flux Observer for Induction Motors. Acta Autom. Sin. 2012, 38, 288–294. [Google Scholar] [CrossRef]
- Sun, Y.X.; Tang, J.W.; Shi, K.; Zhu, H.Q. Vector control of speed sensorless bearingless induction motors using improved MRAS. Control Theory Appl. 2019, 36, 939–950. [Google Scholar]
- Yang, Z.; Wang, M.; Sun, X. Speed-sensorless vector control system of bearingless induction motor based on reactive power MRAS of torque winding. J. Sichuan Univ. Eng. Sci. Ed. 2014, 46, 140–146. [Google Scholar]
- Yang, Z.; Fan, R.; Sun, X.; Dong, D.; Zhu, H. Speed-sensorless control system of bearingless induction motor based on the extended Kalman filter. Chin. J. Sci. Instrum. 2015, 36, 1023–1030. [Google Scholar] [CrossRef]
- Sun, Y.; Shen, Q.; Shi, K.; Zhu, K. Speed-Sensorless Control System of Bearingless Induction Motor Based on the Novel Extended Kalman Filter. Trans. China Electrotech. Soc. 2018, 33, 2946–2955. [Google Scholar]
- Zhao, Q.; Yang, Z.; Sun, X.; Ding, Q. Speed-sensorless control system of a bearingless induction motor based on iterative central difference Kalman filter. Int. J. Electron. 2020, 107, 1524–1542. [Google Scholar] [CrossRef]
- Yang, Z.; Li, F.; Chen, Z.; Sun, X. Revolving speed self-detecting control based on low-frequency signal injection for bearingless induction motor. Trans. Chin. Soc. Agric. Eng. 2017, 33, 41–47. [Google Scholar]
- Sun, X.; Chen, L.; Yang, Z.; Zhu, H. Speed-Sensorless Vector Control of a Bearingless Induction Motor with Artificial Neural Network Inverse Speed Observer. IEEE/ASME Trans. Mechatron. 2013, 18, 1357–1366. [Google Scholar] [CrossRef]
- Cheng, S.; Jiang, H.; Huang, J.; Kang, M. Position sensorless control based on sliding mode observer for multiphase bearingless motor with single set of windings. Trans. China Electrotech. Soc. 2012, 27, 71–77. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Torque System | Suspension System |
|---|---|---|
| Stator resistance (Ω) | 1.6 | 2.7 |
| Stator leakage-inductance (mH) | 4.3 | 3.98 |
| Rotor resistance (Ω) | 1.423 | 2.344 |
| Rotor leakage-inductance (mH) | 4.3 | 3.98 |
| Exciting inductance (mH) | 85.9 | 230 |
| Stator inner diameter (mm) | 62 | |
| Stator core length (mm) | 82 | |
| Average air-gap length (mm) | 0.6 | |
| Auxiliary bearing clearance (mm) | 0.2 | |
| Moment of inertia (kg·m2) | 0.024 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Bu, W.; Qiao, Y. Research on the Speed Sliding Mode Observation Method of a Bearingless Induction Motor. Energies 2021, 14, 864. https://doi.org/10.3390/en14040864
Chen Y, Bu W, Qiao Y. Research on the Speed Sliding Mode Observation Method of a Bearingless Induction Motor. Energies. 2021; 14(4):864. https://doi.org/10.3390/en14040864
Chicago/Turabian StyleChen, Youpeng, Wenshao Bu, and Yanke Qiao. 2021. "Research on the Speed Sliding Mode Observation Method of a Bearingless Induction Motor" Energies 14, no. 4: 864. https://doi.org/10.3390/en14040864
APA StyleChen, Y., Bu, W., & Qiao, Y. (2021). Research on the Speed Sliding Mode Observation Method of a Bearingless Induction Motor. Energies, 14(4), 864. https://doi.org/10.3390/en14040864