
Adaptive Robust Fault-Tolerant Control Design for Wind Turbines Subject to Pitch Actuator Faults




Abstract
:1. Introduction
- An adaptive sliding mode control (ASMC) approach capable of mitigating pitch actuator faults whilst ensuring system stability under faulty conditions,
- An adaptation mechanism resulting in a sliding mode approach with reduced gain compared to existing approaches [33] thereby minimizing the chattering problem,
- A fault tolerant control approach that does not require any explicit information from the fault detection unit, hence resulting in a simple and easy to implement FTC design.
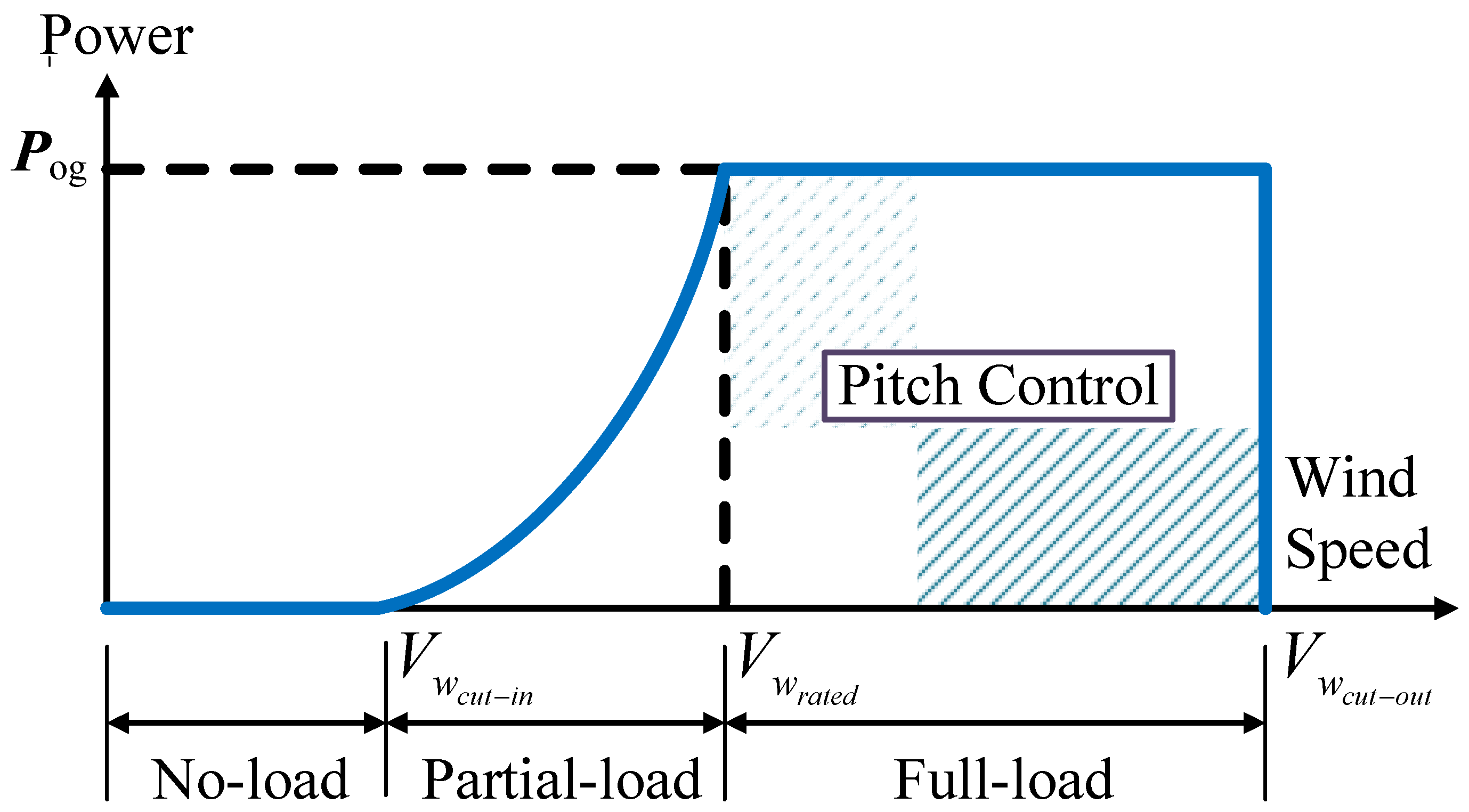
2. Wind Turbines’ Operation and Modeling
2.1. WT’s Aerodynamic Model
2.2. Drivetrain Model
2.3. Pitch Actuator Model
3. Controller Design
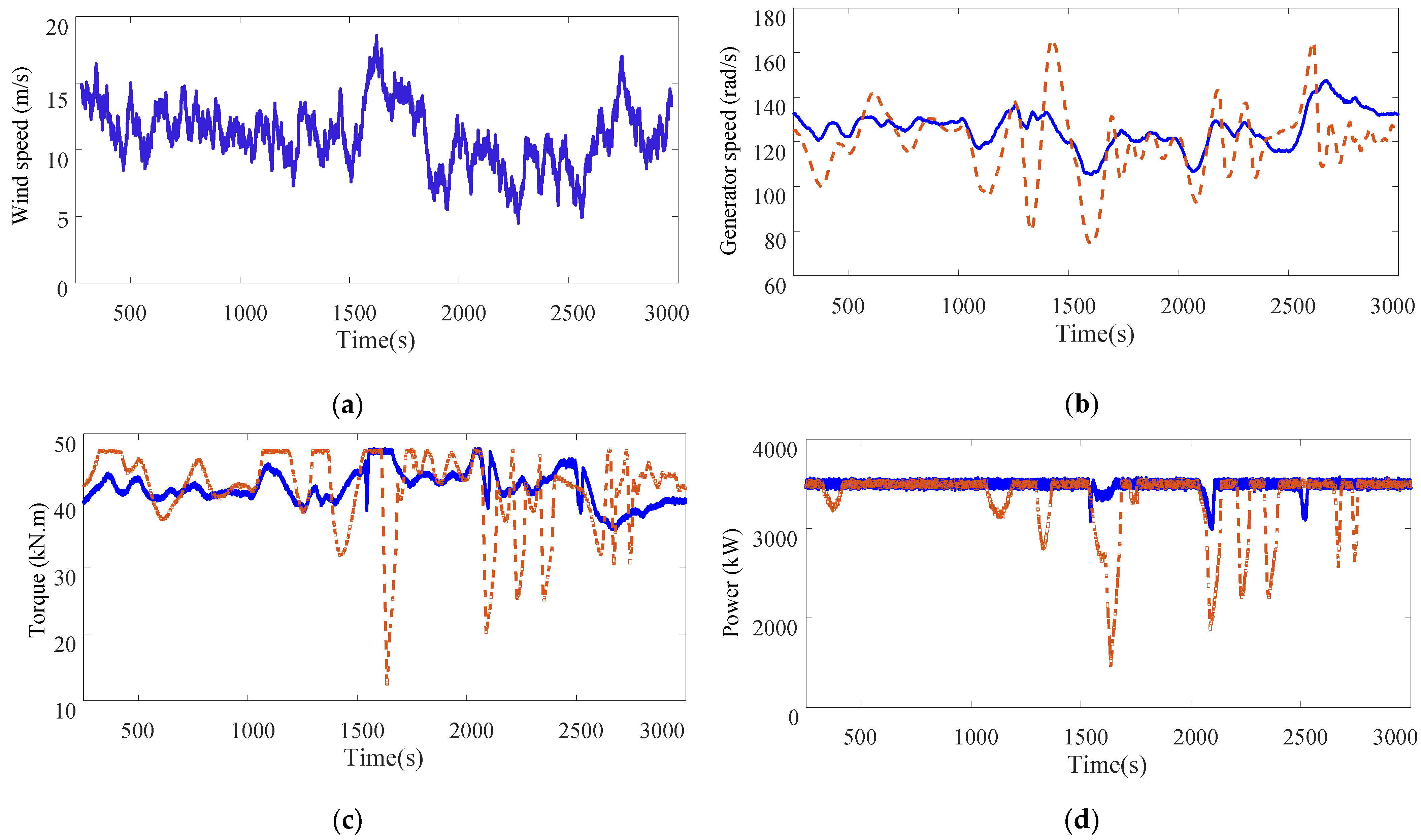
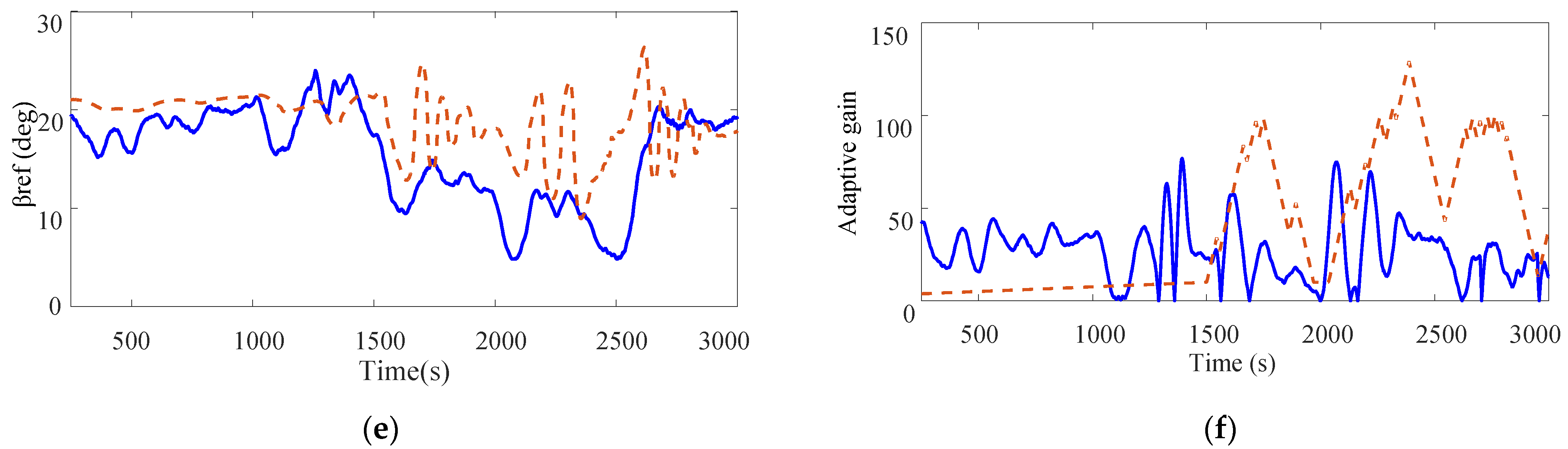
4. Simulation Results
- Fault 1:
- a gradual increase in the content of the actuator oil. The considered fault is modeled as a gradual variation in the parameters of the pitch actuator 1. Consequently, the parameters are varied from ωn = 11.11 rad/s and ξ = 0.6 to , .
- Fault 2:
- a hydraulic pressure drop in actuator 2. This fault is modeled as an abrupt change of the pitch system parameters from ωn = 11.11 rad/s and ξ = 0.6 to .
- Fault 3:
- a pitch sensor fixed value fault modeled by Δβ3 =. where β3 represents the measurement of the third pitch angle.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Rotor speed; | Rated rotor speed | ||
| Generator speed | Rated generator speed; | ||
| Generator power | Power sensitivity | ||
| Cut-in wind speed | Cut-out wind speed | ||
| Rated wind speed | Pitch angle of the ith actuator | ||
| Aerodynamic power | Aerodynamic torque | ||
| Generator torque; | Pitch angle | ||
| Power coefficient; | Adaptive gains | ||
| Torsion angle; | Gear box ratio | ||
| Drivetrain inertia; | Natural frequency | ||
| Damping ratio; | Upper bound of the perturbation | ||
| Pitch angle state vector; | Pitch angle refernce | ||
| Torque reference | Adaptive SMC control | ||
| Adaptive term | Switching term | ||
| Power sensitivity around an operating point; | Power sensitivity perturbation |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Rated power | 5 MW | Rated wind speed | 11.4 m/s |
| Rotor orientation, configuration | Upwind, 3 blades | Cut in, cut out wind speed | 3 m/s, 25 m/s |
| Rotor, Hub diameter | 126 m, 3 m | Cut in, rated rotor speed | 6.9 rpm, 12.1 rpm |
| Hub height | 90m | Rated tip speed | 80 m/s |
| Rotor mass | 110,000 kg | Nacelle mass | 240,000 kg |
References
- World Wind Energy Association. Available online: https://gwec.net/gwec-forecasts-817-gw-of-wind-power-in-2021 (accessed on 20 February 2021).
- Johnson, S.J.; Dam, C.P.; Berg, D.E. Active Load Control Techniques for Wind Turbines; Sandia National Laboratories: Livermore, CA, USA, 2018.
- Gao, R.; Gao, Z. Pitch control for wind turbine systems using optimization, estimation and compensation. Renew. Energy 2016, 91, 501–515. [Google Scholar] [CrossRef]
- Poultangari, I.; Shahnazi, R.; Sheikhan, M. RBF neural network based PI pitch controller for a class of 5 MW wind turbines using particle swarm opotimization algorithm. ISA Trans. 2012, 51, 641–648. [Google Scholar] [CrossRef]
- AlShehri, A.; Fekih, A. Pitch control design for optimum energy capture in variable-speed wind turbines. In Proceedings of the IEEE International Multi-Conference on Systems, Signals and Devices SSD, Hammamet, Tunisia, 18–21 March 2013; pp. 1–6. [Google Scholar]
- Alsoud, Z.; Al-soud, M.; Shakarin, T. Linear parameter varying robust control for wind turbine power regulation. In Proceedings of the 2020 7th International Conference on Control, Decision and Information Technologies (CoDIT), Prague, Czech Republic, 29 June–2 July 2020; pp. 650–655. [Google Scholar]
- Jafarnejadsani, H.; Pieper, J. Gain-scheduled l1-optimal control of variable-speed-variable-pitch wind turbine. IEEE Trans. Control Syst. Technol. 2015, 23, 372–379. [Google Scholar] [CrossRef]
- Moradi, H.; Vossoughi, G. Robust control of the variable speed wind turbines in the presence of uncertainties: A comparison between H∞ and PID controller. Energy 2015, 90, 1508–1521. [Google Scholar] [CrossRef]
- Asl, H.; Yoon, J. Adaptive control of variable-speed wind turbines for power capture optimization. Trans. Inst. Meas. Control 2017, 39, 1663–1672. [Google Scholar]
- Abdel, A.; Elshafei, L. Wind-turbine collective pitch control via a fuzzy predictive algorithm. Renew. Energy 2016, 87, 298–306. [Google Scholar]
- Blanke, M.; Kinnaert, M.; Lunze, J.; Staroswiecki, M. Diagnosis and Fault-Tolerant Control, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Badihi, H.; Hang, Y.Z.; Rakheja, S.; Pillay, P. Model-based fault-tolerant pitch control of an offshore wind turbine. IFAC Pap. 2018, 51, 221–226. [Google Scholar] [CrossRef]
- Lan, J.; Patton, R.; Zhu, X. Fault tolerant wind turbine pitch control using adaptive sliding mode estimation. Renew. Energy 2018, 116, 219–231. [Google Scholar] [CrossRef]
- Jain, T.; Yame, J. Fault-tolerant economic model predictive control for wind turbines. IEEE Trans. Sustain. Energy 2019, 10, 1696–1704. [Google Scholar] [CrossRef]
- Nadihi, H.; Zhang, Y.; Hong, H. Fuzzy gain-scheduled active fault tolerant control of a wind turbine. J. Frankl. Inst. 2014, 351, 3677–3706. [Google Scholar]
- Hosseinzade, M.; Salmasi, F. Analysis and detection of wind system failure in a microgrid. J. Renew. Sustain. Energy 2016, 8, 1–18. [Google Scholar]
- Azizi, A.; Nourisola, H.; Shoja-Majidabad, S. Fault tolerant control of wind turbines with an adaptive output feedback sliding mode controller. Renew. Energy 2019, 135, 55–65. [Google Scholar] [CrossRef]
- Acho, L.; Rodellar, J.; Tutiven, C.; Vidal, Y. Passive fault-tolerant control strategy in controlled wind turbines. In Proceedings of the 2016 3rd Conference on Control and Fault-Tolerant Systems (SysTol), Barcelona, Spain, 7–9 September 2016; pp. 1–6. [Google Scholar]
- Fekih, A. A robust fault tolerant control strategy for aircraft systems. In Proceedings of the IEEE Multi-Conference on Systems and Controls, St. Petersburg, Russia, 8–10 July 2009; pp. 1643–1648. [Google Scholar]
- Moradi, M.; Fekih, A. Adaptive PID-Sliding Mode Fault Tolerant Control Approach for Vehicle Suspension Systems Subject to Actuator Faults. IEEE Trans. Veh. Technol. 2014, 63, 1041–1054. [Google Scholar] [CrossRef]
- Steinberger, M.; Horn, M.; Fridman, L. Variable-Structure Systems and Sliding-Mode Control; Springer Nature: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Morshed, M.J.; Fekih, A. A Sliding mode approach to enhance the power quality of wind turbines under unbalanced grid conditions. IEEE/CAA J. Autom. Sin. 2019, 6, 566–574. [Google Scholar] [CrossRef]
- Ayadi, M.; Salem, F.; Derbel, N. Sliding mode approach for blade pitch angle control wind turbine using PMSG under DTC. In Proceedings of the International Conference and Sciences and Tech. of Automatic Control and Computer Engineering, Monastir, Tunisia, 21–23 December 2015. [Google Scholar]
- Colombo, L.; Corradini, M.L.; Ippoliti, G.; Orlando, G. Pitch angle control of a wind turbine operating above the rated wind speed: A sliding mode control approach. ISA Trans. 2020, 96, 95–102. [Google Scholar] [CrossRef]
- Kamarzarrin, M.; Refan, M. Intelligent sliding mode adaptive controller design for wind turbine pitch control system using PSO-SVM in presence of disturbance. J. Control Autom. Electr. Syst. 2020, 31, 912–925. [Google Scholar] [CrossRef]
- Wang, X.; Shen, Y. Fault-Tolerant Control Strategy of a Wind Energy Conversion System Considering Multiple Fault Reconstruction. Appl. Sci. 2018, 8, 794. [Google Scholar] [CrossRef] [Green Version]
- Utkin, V. Chattering problem in sliding mode control system. IFAC Proc. 2006, 39, 1. [Google Scholar] [CrossRef]
- Morshed, M.J.; Fekih, A. Design of a second order sliding mode approach for DFIG-based wind energy systems. In Proceedings of the American Control Conference, Seattle, WA, USA, 24–26 May 2017; pp. 729–734. [Google Scholar]
- Morshed, M.J.; Fekih, A. A comparison study between two sliding mode based controls for voltage sag mitigation in grid connected wind turbines. In Proceedings of the IEEE Conference on Control Applications, Sydney, Australia, 21–23 September 2015; pp. 1913–1918. [Google Scholar]
- Mobayen, S.; Bayat, F.; Taheri, A.; Fekih, A. Adaptive nonsingular integral-type second order terminal sliding mode tracking controller for uncertain nonlinear systems. Int. J. Control Autom. Syst. 2021. [Google Scholar] [CrossRef]
- Morshed, M.J.; Fekih, A. Design of a Chattering-free integral terminal sliding mode approach for DFIG-based wind energy systems. Optim. Control Appl. Methods 2020, 41, 1718–1734. [Google Scholar] [CrossRef]
- Shetssel, Y.; Taleb, M.; Plestan, F. A novel adaptive-gain supertwisting sliding mode controller: Methodology and application. Automatica 2012, 48, 759–769. [Google Scholar] [CrossRef]
- Xin, W.; Wanli, Z.; Bin, Q.; Pengcheng, L. Sliding mode control of pitch angle for direct driven PM wind turbine. In Proceedings of the the 26th Chinese Control and Decision Conference (2014 CCDC), Changsha, China, 31 May–2 June 2014; pp. 1–6. [Google Scholar]
- Noshirvani, G.; Askari, J.; Fekih, A. Fractional order fault-tolerant pitch control design for a 2.5 MW Wind Turbine Subject to Actuator Faults. Struct. Control Health Monit. 2019, 26, 1–13. [Google Scholar]
- Wilkinson, M.; Harman, K.; Hendriks, B. Measuring Wind Turbine Reliability- Results of the Reliawind Project. Wind Energy 2011, 35, 102–109. [Google Scholar]
- Noshirvani, G.; Askari, J.; Fekih, A. A robust fault detection and isolation filter for the pitch system of a variable speed wind turbine. Int. J. Electr. Eng. Syst. 2018, 28, e2625. [Google Scholar] [CrossRef]
- Bianchi, F.; Battista, H.; Mantz, R. Wind Turbine Control Systems, Principles, Modeling, and Gain Scheduling Design; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Odgaard, P.F.; Johnson, K.E. Wind turbine fault detection and fault tolerant control-An enhanced benchmark challenge. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 4447–4452. [Google Scholar]
- Hosseinzadeh, M.; Yazdanpanah, M.J. Performance enhanced model reference adaptive control through switching non-quadratic Lyapunov function. Syst. Control Lett. 2015, 76, 47–55. [Google Scholar] [CrossRef]
- FAST Wind Research. Available online: https://www.nrel.gov/wind/nwtc/fast.html (accessed on 2 September 2019).
- Jonkman, B.J.; Buhl, M.L. TurbSim User’s Guide; Technical Report NREL/EL-500-41136; National Renewable Energy Lab (NREL): Golden, CO, USA, 2006.
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5MW Reference Wind Turbine for Offshore System Development; Technical Report NREL/TP-500-38060, February 2009. Available online: https://www.nrel.gov/docs/fy09osti/38060.pdf (accessed on 2 September 2019).




| Fault No. | Parameter Variation | Time [s] | Fault Type |
|---|---|---|---|
| 1 | slow change of ωn,ξ→ ωn1,ξ1 | 2200–2700 | Air content increase in the oil |
| 2 | abrupt change of ωn,ξ→ ωn2,ξ2 | 1500–1700 | Pressure drop |
| 3 | Δβ3= | 1600–2200 | Pitch sensor 3 fixed value |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fekih, A.; Mobayen, S.; Chen, C.-C. Adaptive Robust Fault-Tolerant Control Design for Wind Turbines Subject to Pitch Actuator Faults. Energies 2021, 14, 1791. https://doi.org/10.3390/en14061791
Fekih A, Mobayen S, Chen C-C. Adaptive Robust Fault-Tolerant Control Design for Wind Turbines Subject to Pitch Actuator Faults. Energies. 2021; 14(6):1791. https://doi.org/10.3390/en14061791
Chicago/Turabian StyleFekih, Afef, Saleh Mobayen, and Chih-Chiang Chen. 2021. "Adaptive Robust Fault-Tolerant Control Design for Wind Turbines Subject to Pitch Actuator Faults" Energies 14, no. 6: 1791. https://doi.org/10.3390/en14061791
APA StyleFekih, A., Mobayen, S., & Chen, C. -C. (2021). Adaptive Robust Fault-Tolerant Control Design for Wind Turbines Subject to Pitch Actuator Faults. Energies, 14(6), 1791. https://doi.org/10.3390/en14061791