1. Introduction
Variable speed drive (VSD) applications [
1] widely use IM [
2]. This is due to its lower cost, higher efficiency, and lower maintenance compared with other electric motors.
The VSD performing the scalar control scheme (SCS) [
3] mainly moves blowers, fans, and centrifugal pumps [
4]. These low-performance applications demand a starting electromagnetic torque of up to 25% of the nominal torque, corresponding to the capacity of the standard SCS. Moreover, the SCS has nonrapid and even oscillatory transient speed behavior with a steady-state speed-accuracy between 1% to 4% for higher speeds [
5]. Furthermore, it has the most straightforward control scheme without parameter estimates or variable observers, as shown in
Figure 1.
Standard SCS follows the required rotor angular speed
after establishing the necessary angular electrical frequency
and stator voltage amplitude
. It applies a boost voltage
, adjusted from 3% to 50% of
, to assure a starting electromagnetic torque from 0.09% to 25% of the rated torque. It acts at the minimum angular frequency
, tuned from 3% to 6% of the rated angular electrical frequency
, to protect the IM from overcurrent consumption. Later, at the cut angular frequency
, tuned from 40% to 50% of
, it switches to the
curve, which also saturates at the rated voltage for IM protection [
6].
Based on previous information, the following sections describe this paper’s motivation, background, related work, and claims.
1.1. Motivation
Several researchers aim to improve the SCS scheme. Beyond studying the speed oscillations across the boost voltage curve, the work [
5] proposes two methods to mitigate them. To enhance the steady-state accuracy of the actual rotor angular speed, reference [
7] uses a closed-loop speed control. Moreover, reference [
8] proposes a PI slip controller.
Other proposals develop a slip speed estimator based on an electromagnetic torque estimation in [
9], on a gap power estimation in [
10], and on a stator flux observer in [
11]. Based on the ratio between the rated slip and rated stator current, references [
6,
12] calculate the slip. Furthermore, the work [
13] proposes an optimal V/f ratio based on a reactive power estimate. These proposals require IM parameters or variable estimation, with the exception of [
6].
Moreover, other works focus on improving the reduced starting electromagnetic torque SCS issue reported in [
14,
15]. The solution given in [
14] needs stator resistance and a flux estimator. At the same time, the proposal [
15] avoids parameters and variable estimators, keeping a simple control scheme. Later, reference [
16] gives an alternative solution to the novel method given in [
15]. It assures less stator current composition and faster speed response than the standard SCS [
6], with no need for the minimum angular frequency
.
This paper aims to further improve [
16] results, taking into account the following background information.
1.2. Background
The work [
15] calls its solution high-starting torque (HST)-SCS. It has a multiple-input and multiple-output (MIMO) APBC that switches to the standard boost voltage curve of the SCS [
6], causing curve speed and current chattering issues. The proposal [
16] solves these issues after presenting a scalar output normalized APBC that smoothly switches to the standard boost voltage curve of the SCS [
6]. As a result, reference [
16] expands the applications of the standard SCS [
6], including HST capability and keeping a simple control scheme without parameter or variable estimation. It can move, for instance, loaded conveyor belts requiring 100% of the nominal torque at the start and low steady-state speed-accuracy [
16].
As an alternative to the APBC controller [
16], the work [
17] proposes using a normalized MRAC in the HST-SCS with good results. This paper also aims to further improve [
16] by suggesting a different adaptive controller. The following section describes the details.
1.3. Related Works
All previously discussed starting adaptive control algorithms are based on the adaptive concepts given in [
18] for a model reference adaptive controller (MRAC). The work [
15] uses an adaptive passivity-based controller (APBC), reducing the trial and error APBC adjustment given in [
19]. Nevertheless, the normalized APBC proposed in [
16] further improves the APBC tuning [
15] with a solution less dependent on the operational range and motor power. The work [
17] proposes using a normalized MRAC, extending the direct approach described in [
18].
So far, all HST-SCS, including this paper’s proposal, use a pure adaptive controller, active only during starting. Hence, these are not gain scheduling controllers such as the one used in [
20] to control a brushless DC motor. This paper extends the cascade APBC proposed in [
21] and applies it to the HST-SCS of IM, as the following describes.
1.4. Claims
This paper’s main contribution is proposing a CL HST-SCS based on a cascade normalized-APBC (N-APBC). It starts expanding the standard cascade APBC proposed in [
21], normalizing the information vector and adaptive law gains for a more straightforward tuning method. Later, the cascade N-APBC design regulates the IM starting stator current decreasing the current consumption, diminishing IM stress and failure risk due to this cause [
22]. The solution keeps the simplicity of the SCS, only using tuning information from the motor nameplate and datasheet, not needing variable observers or parameter estimators. It applies the slip speed calculation’s industry solution of [
6].
This paper’s organization is as follows. The Preliminaries Section describes the basic HST-SCS, including its block diagram, control strategy, and method fundamentals. Later,
Section 3 describes the proposed CL HST-SCS with the its block diagram, remarking the differences and the closed-loop control strategy. The Experimental Results Section tests both CL HST-SCS and HST-SCS strategies and describes the obtained results. Finally, the Conclusion Section presents the main findings summary.
2. Preliminaries of the Basic HST-SCS
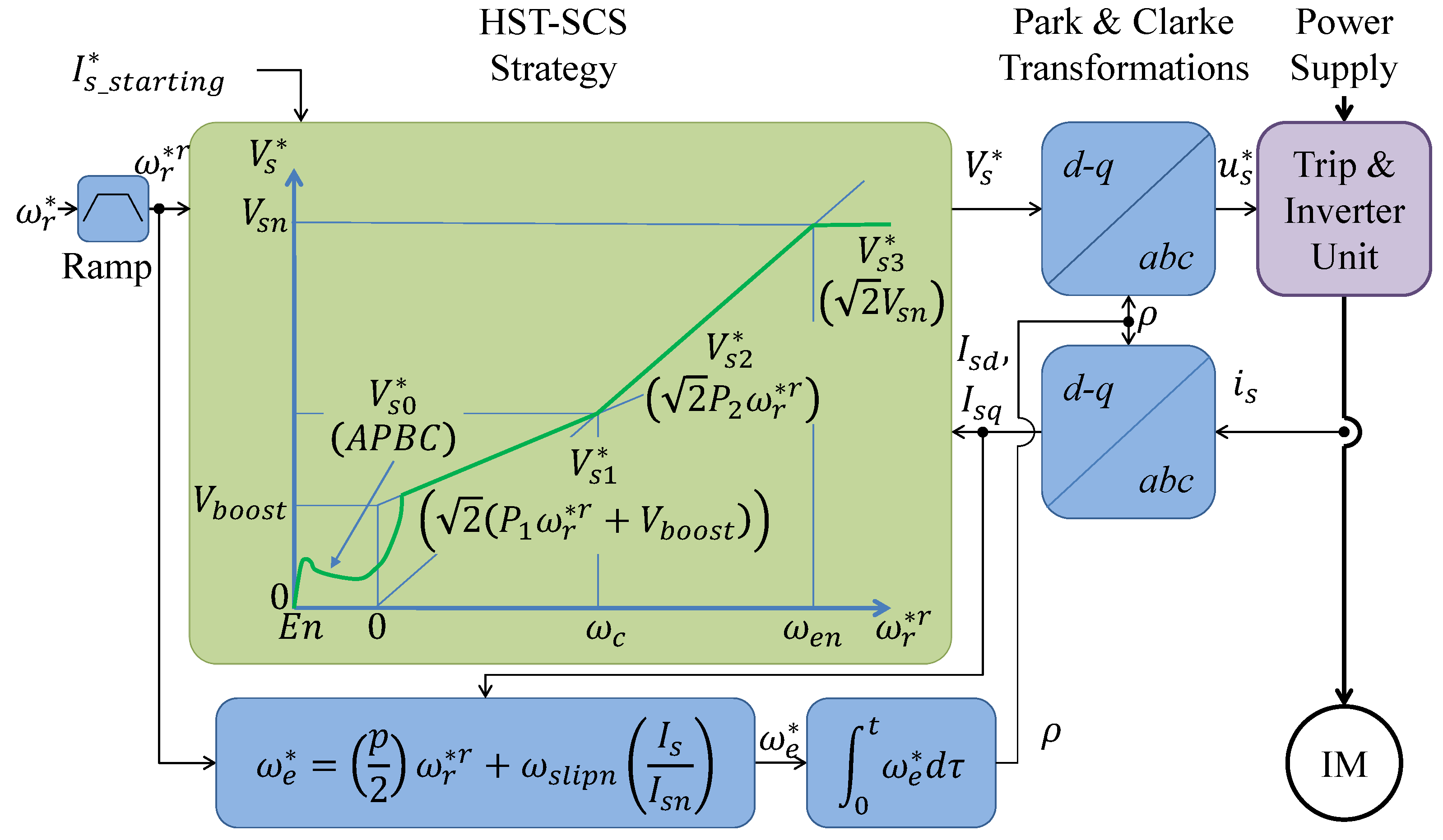
Figure 2 presents the basic HST-SCS block diagram [
16].
The basic HST-SCS follows the required rotor angular speed
after establishing the required angular electrical frequency
and stator voltage amplitude
. It takes steady-state nominal variable values from the motor nameplate for configuring purposes. For instance, the rated current per phase
, the rated voltage per phase
, the number of poles
p, the electrical frequency
, and the rated rotor angular speed
. These last two allow calculating the nominal slip speed
as follows [
6]:
which allows computing the actual
for the required
joint to
and the actual
. This last one is an RMS value obtained from the instantaneous stator components
and
, considered as sinusoidal signals, and as follows:
The required stator voltage amplitude (
3) switches from different voltages curves
,
,
, and
[
16] after enabling the VSD (
), as the following describes:
Moreover, the required stator voltage amplitude (
3) alternates after applying the transformations of Park
[
23] and Clarke [
24], detailed in [
25]. In [
16], the voltage curve
of (
3) aims to keep a constant stator flux magnitude at the start via the following APBC that regulates the starting stator current [
16]:
Theorem 1 ([
16])
. After applying the following normalized-APBC to the IM d-q model:it turns the IM into a passive system from e to the auxiliary variable v. It also guarantees that . This voltage curve
uses the stator flux magnitude dependence on the magnetizing current,
, considering the incoming expression [
15,
16]:
where
is the rotor leakage inductance,
is the magnetizing inductance, and
and
are the stator resistance and inductance, respectively. Moreover,
,
, and
are the stator, rotor, and magnetizing phase currents, respectively.
Furthermore, regulating the starting stator current
guarantees a high starting electromagnetic torque capability as the following describes [
15,
16]:
The boost voltage curve
and the
voltage curve
, from
Figure 1 and
Figure 2, are basically proportional controllers, adjusted as follows:
The voltage curves
and
aim to keep a constant stator flux magnitude
but using its dependence on the stator voltage and angular electrical frequency ratio
. This comes from the steady-state IM equivalent circuit per phase after applying Kirchhoff’s stator voltage law [
3,
15,
16,
25] and neglects the stator impedance voltage drop, as follows:
where
and
are the stator resistance and leakage inductance, respectively. Moreover,
is the stator phase voltage. Finally,
prevents the IM from operating over the nominal stator voltage,
, and protects it.
Remark 1. The APBC (4) proposed in [16] considers the required rotor angular speed instead of the actual rotor angular speed, i.e., , and effectively regulates the stator current around the start. However, the following section extends its efficacy after considering the actual speed and a cascade APBC. 3. Proposed CL HST-SCS for IM
In this section, based on the following IM dynamical d-q model described, this paper proposes a cascade N-APBC and applies it to HST-SCS.
3.1. Proposed Cascade N-APBC for Nonlinear Systems
The IM dynamical d-q model is a class of nonlinear systems defined as follows:
Here, are the inner and outer outputs; the inner and outer control inputs are . The unknown parameters are , and . The known nonlinear functions are , and , with and . Moreover, it has a bounded-input bounded-output (BIBO) internal dynamics .
The following Theorem 2 extends a cascade APBC [
21] for nonlinear systems of the form (
9).
Theorem 2. After applying the following cascade N-APBC to the nonlinear system (9), it turns the IM into a passive system from and to the auxiliary variables and , respectively, with and . It also guarantees that and Here, is the desired trajectory. The normalization factors , , , and correspond to the maximum operational range of , , , and , respectively. The normalized information vectors consider these factors and multiply by 100, normalizing a 100 range. Hence, the fixed-gains and have a form [16], with . Then, these use the term for a fast tuning, assuring a reasonable operating range and the design parameters , which allows a fine-tuning adjustment. Moreover, assures an inner loop ξ times faster than the outer loop for the cascade proper functioning. Appendix A contains the stability proof of Theorem 1. The following section applies Theorem 2 to the IM and describes the proposal details.
3.2. Cascade N-APBC Applied to HST-SCS for IM
Figure 3 shows the proposed CL HST-SCS block diagram for IM.
It has a similar control scheme to
Figure 2 but adjusts the voltage curve
after applying the proposed cascade N-APBC (
10,
11) to the IM model, once considering as unknown its nonlinear parameters
,
,
, and
, and its known functions
,
,
, and
. Hence, the proposal also uses (
1) to calculate the slip. However, it establishes the scalar required stator voltage
(
3), replacing the adaptive controller (
4) conforming the voltage curve
with the following proposed controller for
.
Here, the adaptive controller parameters are and . The fixed-gains are depending on the design parameter . The normalized information vectors are and .
The CL HST-SCS considers that the IM dynamical d-q model has the form of (
9). Here, the outputs are
, and the control inputs are
. The unknown parameters are
,
,
, and
. Additionally, the known nonlinear functions are
,
,
, and
. Moreover, the internal dynamics are
, defined as follows:
Here,
and
are the rotor flux direct and quadrature components, respectively. The mechanical viscous damping is
, the motor-load inertia is
J, and the load torque is
. Moreover, the vector
and
are upper and lower rows of the matrix
, respectively. The vectors
and
are the upper and lower rows of matrix
, respectively. Moreover,
C,
d,
, and
are defined as follows [
16]:
Furthermore, is the leakage or coupling coefficient, given by , and is the stator transient resistance, with .
The following Algorithm 1 contains the pseudocode of the proposed CL HST-SCS. Here, the required stator voltage amplitude (
3) considers the proposed cascade-APBC (
12) and (
13).
| Algorithm 1 Pseudocode of the required voltage and frequency for the CL HST-SCS |
| Require:, , (Reference and Input Signal) |
| Require:p, , , , , , , m, , , , (Configuring Parameters) |
| Require:, , (Measurements) |
| Ensure: Required Stator Voltage and electrical frequency |
Calculus Computing Outer Loop Compute: Inner Loop Compute: Computing Compute: Computing Compute: Computing Compute: Voltage Curve Selection ifEn = 1 and then else ifthen else ifthen else end if
|
The following section describes the proposal’s experimental results.
4. Comparative Experimental Results
This section describes the test bench used to validate the proposal, the experimental setup, and the comparative results.
4.1. Test Bench Characteristics
Figure 4 illustrates the test bench used for the comparative experimental results, considering the basic HST-SCS and the CL HST-SCS. The programming of these strategies uses Simulink version 8.9, Matlab R2017a running on PC. Both consider a pulse width modulation (PWM) switching at 8 kHz. Once finished, the PC downloads them via a UTP cable to the control platform. It is a real-time simulator controller OPAL-RT 4510 v2 giving the trip pulses to a two-level inverter unit feeding an IM-load assembly with the parameters of
Table 1. The power supply feeds the inverter through a variac.
Remark 2. The used test bench is based on a double-edge naturally sampled PWM with a two-level voltage source inverter [26], which inherently produces a bipolar switching pattern at the converter outputs. However, the control proposal could also be implemented using the space vector modulation method to improve the harmonic content further, especially for higher modulation indexes when the machine operates around the rated speed [26,27]. The proposed CL HST-SCS could also be implemented in a three-level converter using unipolar PWM. From this
Table 1, the following parameters are calculated: the rated electrical frequency
rad/s and the rated electromagnetic torque
Nm.
Remark 3. Please note that IM parameter values, such as , , , , and , are unknown. Moreover, their knowledge is unnecessary for the proposed CL HSTSCS configuring. Not even the torque-speed characteristic of the feed IM is needed. Table 1 shows the only required IM information taken from the motor nameplate and datasheet. The following section describes the experimental testing setup.
4.2. Experimental Setup
The same testing applies to both strategies, the basic HST-SCS [
16] and CL HST-SCS. It considers the IM has a nominal torque load (set by a prony brake), a 6-second duration test, enabling the VSDs at 0.3 s, and applying a step speed command of 200 rpm, 100 rpm, 1450 rpm, 1300, and 1150 rpm, at times 1 s,
s,
s, 4 s, and 5 s, respectively. The prony brake adjustment is
Nm at the rated speed of 1455 rpm. As a result, the load torque equals
Nm (the rated torque) at 200 rpm and 100 rpm,
Nm at 1455 rpm,
Nm at 1300 rpm, and
NM at 1100 rpm.
Table 2 presents the tuning parameters.
The following section describes the obtained results.
4.3. Comparative Experimental Results
Figure 5 and
Figure 6 show the previous HST-SCS [
16] and CL HST-SCS oscilloscope waveforms, respectively. Both figures exhibit the applied line Voltage
and the consumed stator phase currents
,
, and
around
s.
Below,
Figure 7 shows comparative graphics obtained via the OPAL-RT measurements. It displays the consumed stator phase A current
joint to the required stator phase voltage amplitude
, and the rotor angular speed
versus
for the basic and CL HST-SCS.
The required stator phase voltage
in
Figure 7 shows that CL HST-SCS and HST-SCS apply DC voltage after enabling the VFD and until 1 s. When the IM starts rotating, the HST-SCS keeps using the adaptive starting controller, between 1 s and
s. Later, it switches to the boost curve, active from
s to
s. Finally, the
curves operate from
s until the end.
Figure 7 evidences that required stator phase voltage is lower for the CL HST-SCS. Moreover, the
voltage curve applies for a more extended time, from the start to 1.9s, for the CL HST-SCS. As a result, the CL HST-SCS assures HST not only for starting but almost up to 500 rpm.
The consumed stator phase A current described in
Figure 7 displays similarly consumed DC stator current magnitudes (starting currents) for both strategies. These consume 21.9A for starting; the nominal stator current
. However, it is lower for the CL HST-SCS when starting. After
s, consumption is similar for the CL HST-SCS and HST-SCS.
Figure 7 shows the details.
The actual rotor speed follows the required rotor speed for both HST-SCS strategies. However, the CL HST-SCS has a smoother transient behavior than HST-SCS under 600 rpm. This last one shows a more oscillatory behavior. CL HST-SCS and HST-SCS have similar transient behavior and steady-state accuracy for higher speed references. These last ones are 3.0% for 1455 rpm, 3.8% for 1300 rpm, and 4.1% for 1150 rpm.
The following section describes the conclusions.
5. Conclusions
This paper studies a basic HST-SCS and a CL HST-SCS. Both strategies assure HST with low current consumption compared with the standard SCS [
16]. They all follow the required speed. Moreover, they have a simple control scheme without parameters estimation nor variable observers, but only depend on the IM nameplate and datasheet for their configuring.
Comparative experiments were performed on a test bench. These show that the CL HST-SCS delivers high torque capabilities beyond the starting. Thus, CL HST-SCS has a smoother transient behavior than HST-SCS under 600 rpm.
The proposal of a cascade N-APBC for nonlinear systems encompassing IM allows for obtaining the CL HST-SCS. It considers normalized inner and outer adaptive loops expanding [
21]. Moreover, it further extends the APBC [
15], normalized in [
16], to reduce trial and error APBC adjustment.
The proposed CL HST-SCS contributes to expanding the standard SCS low-performance applications. Not only moving blowers, fans, and centrifugal pumps, but other loads that need a starting torque of 100% rated torque. Future work will consider developing real-time simulations for a higher power IM, including multilevel inverters and SVM modulation.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}