
A Robust Kalman Filter-Based Approach for SoC Estimation of Lithium-Ion Batteries in Smart Homes


Abstract
:1. Introduction
2. Battery Modeling
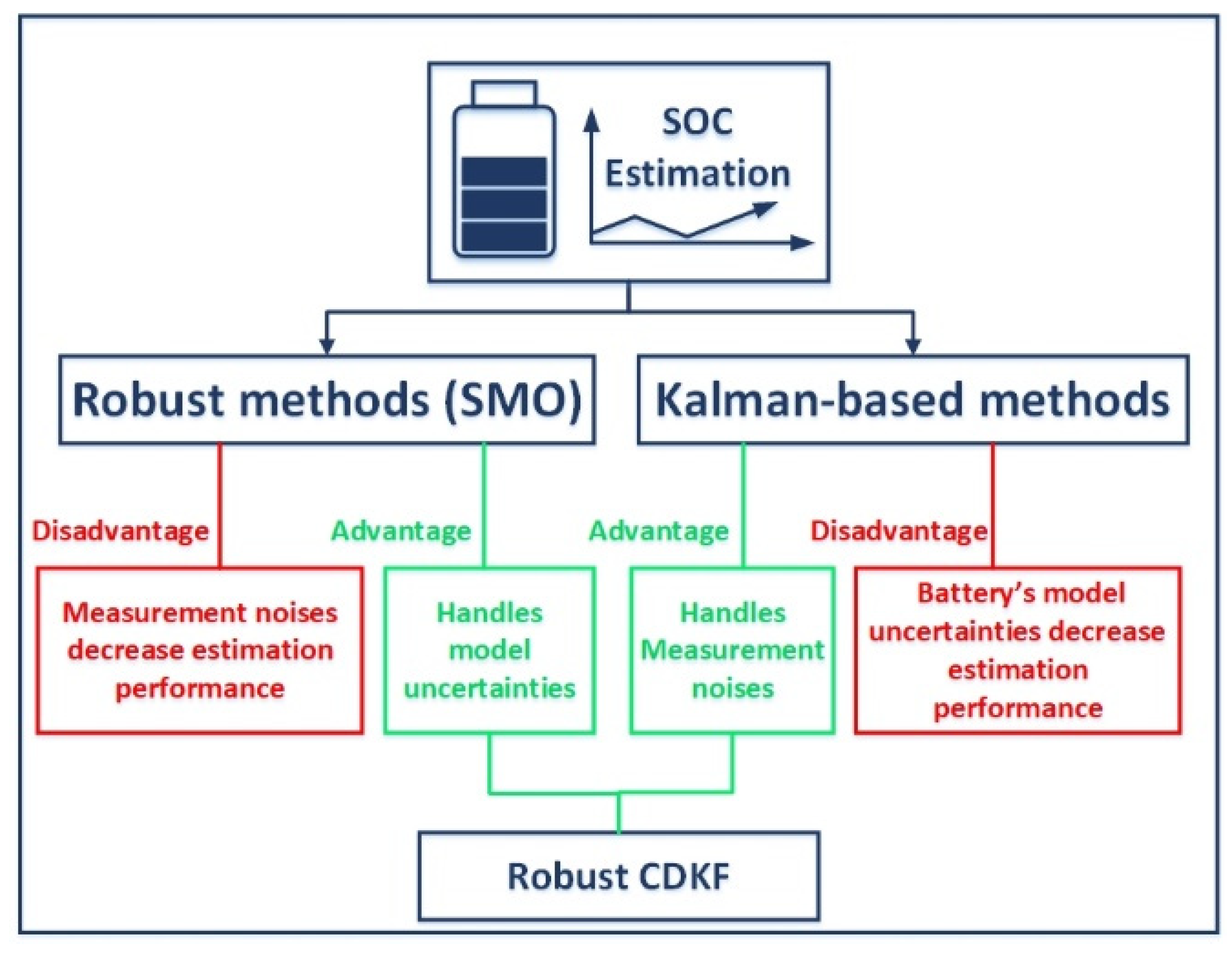
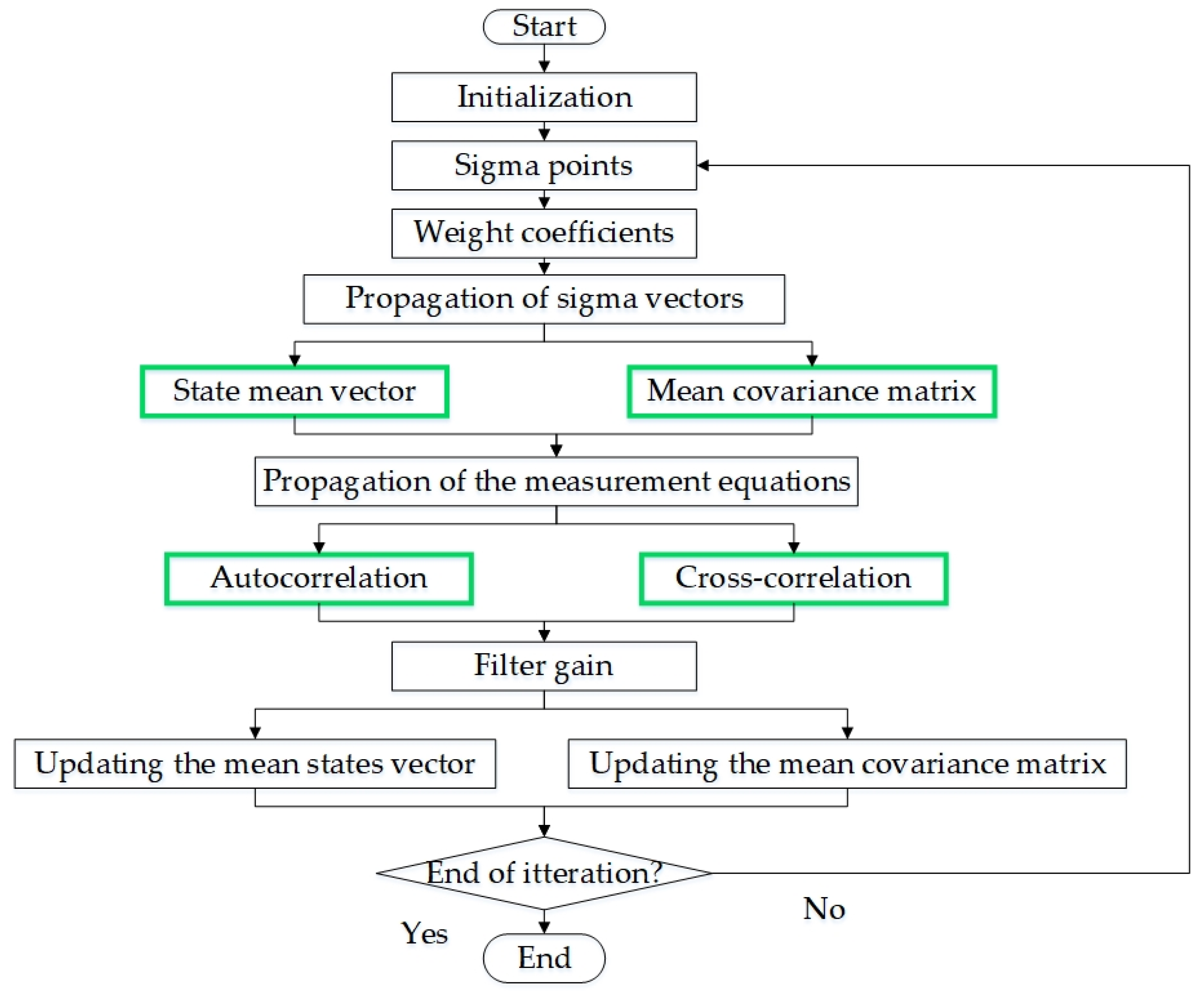
3. Proposed Robust CDKF
4. Experimental Results
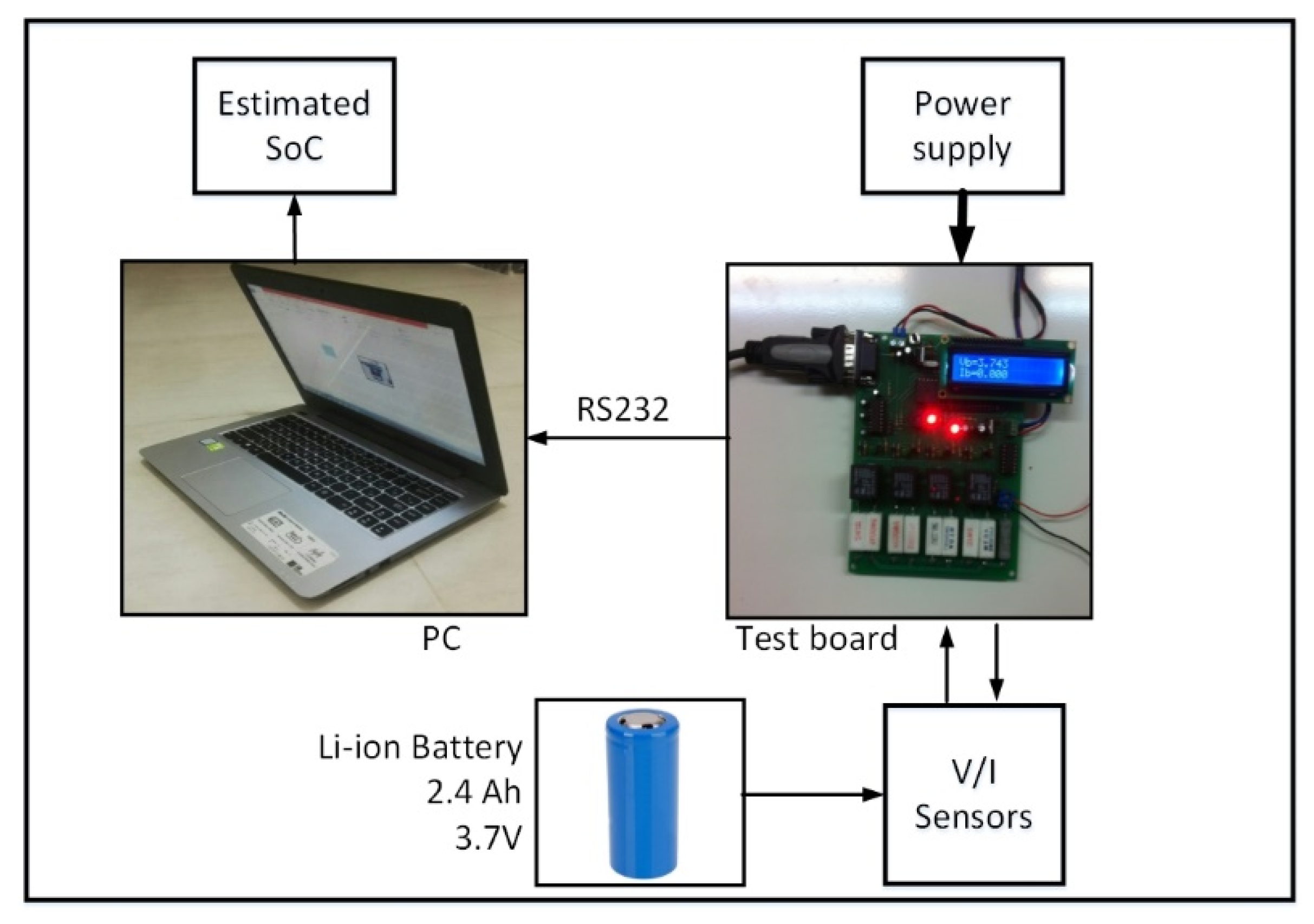
4.1. Test Setup
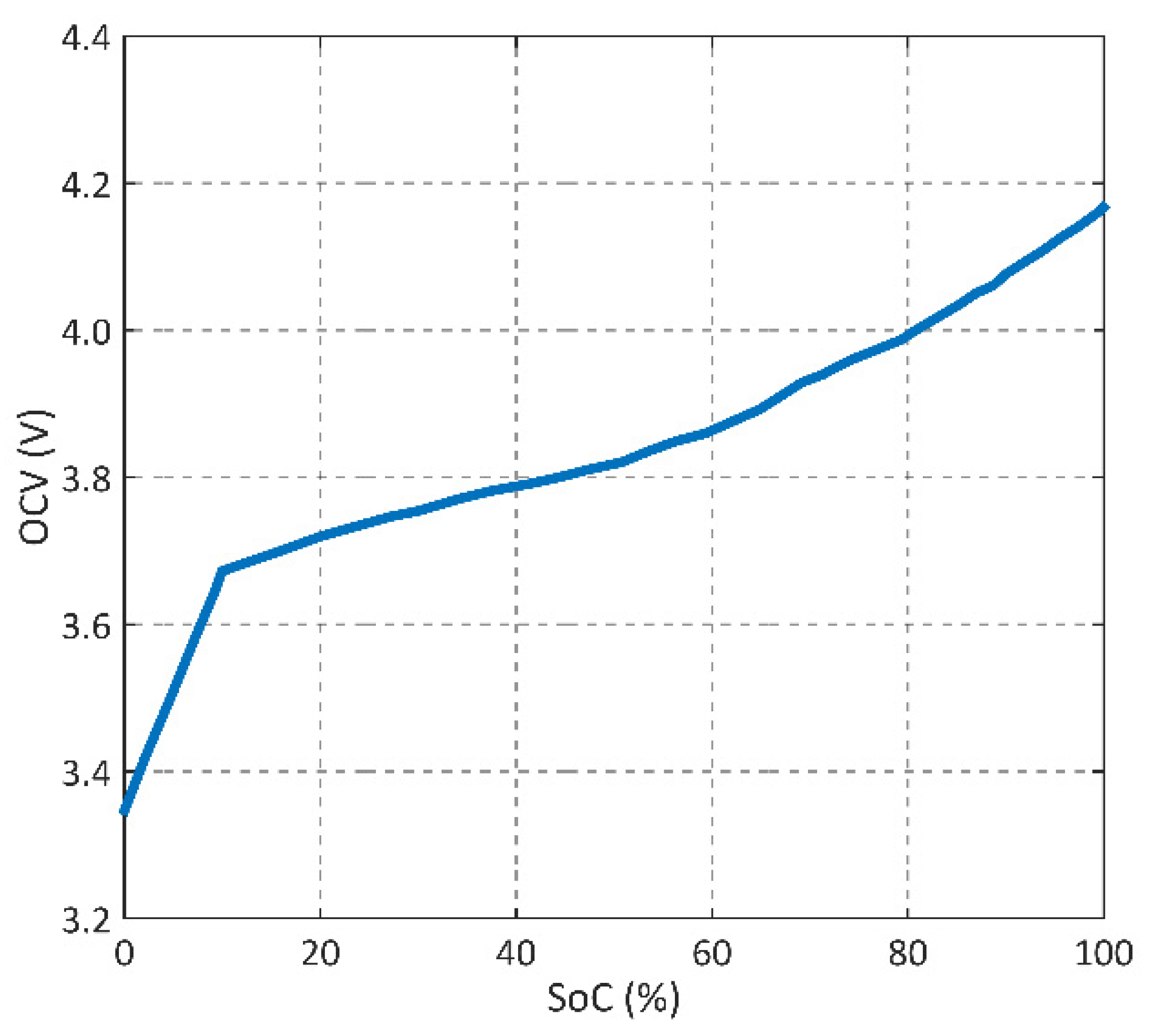
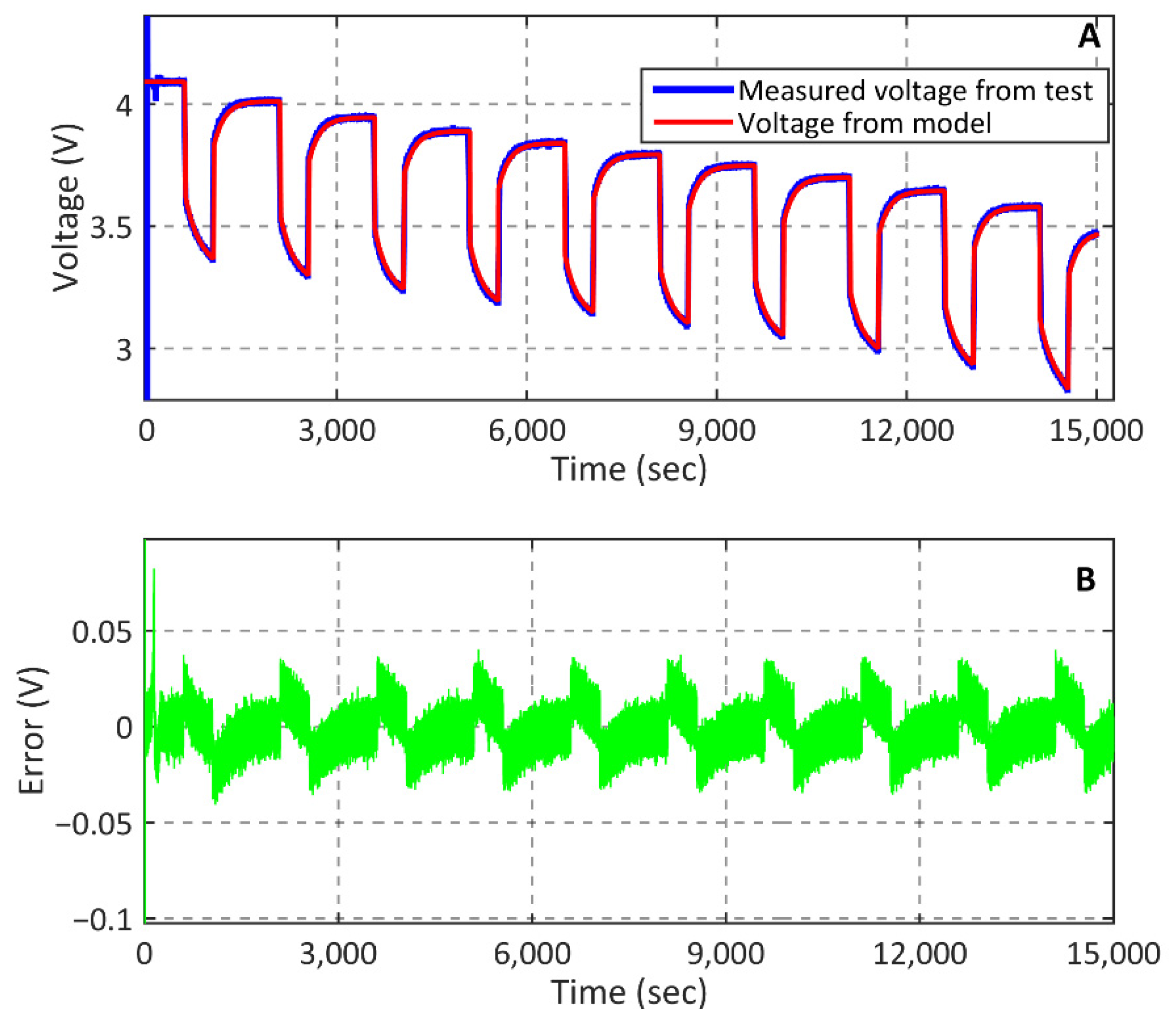
4.2. Experimental Battery-Model Verification
4.3. Robust CDKF Design
4.4. Verification of the Proposed Estimator
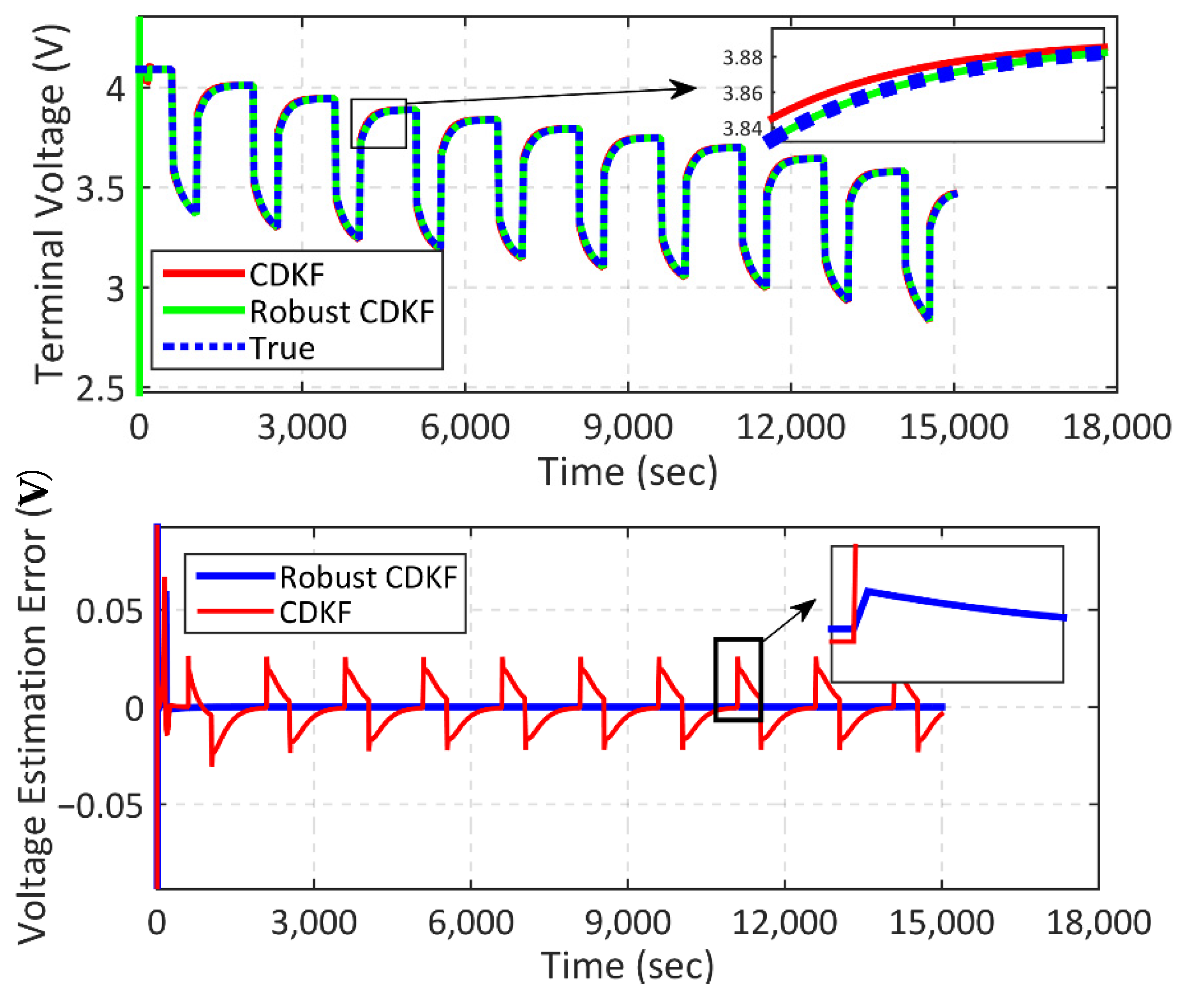
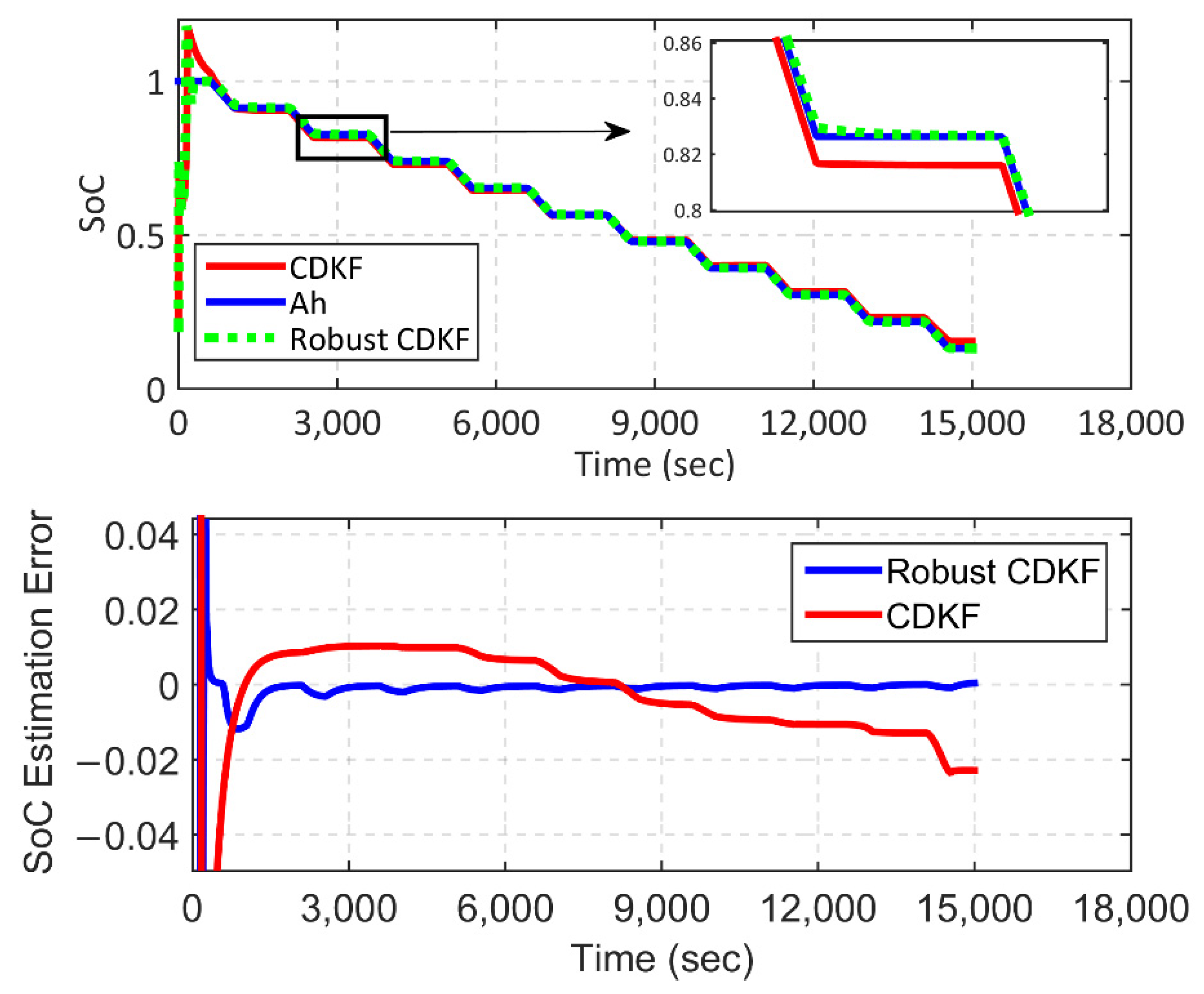
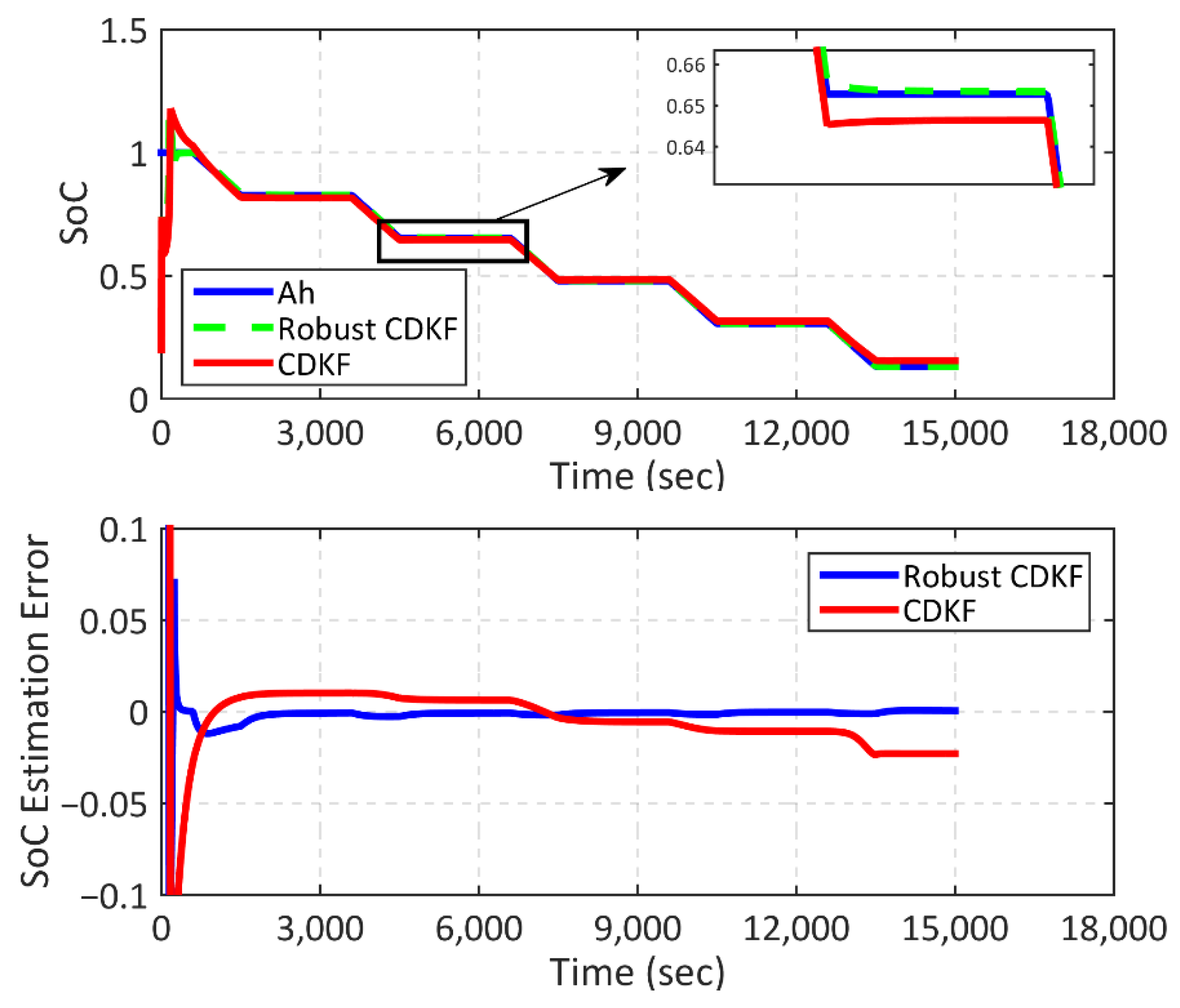
4.4.1. Experimental Tests for the Fresh Battery
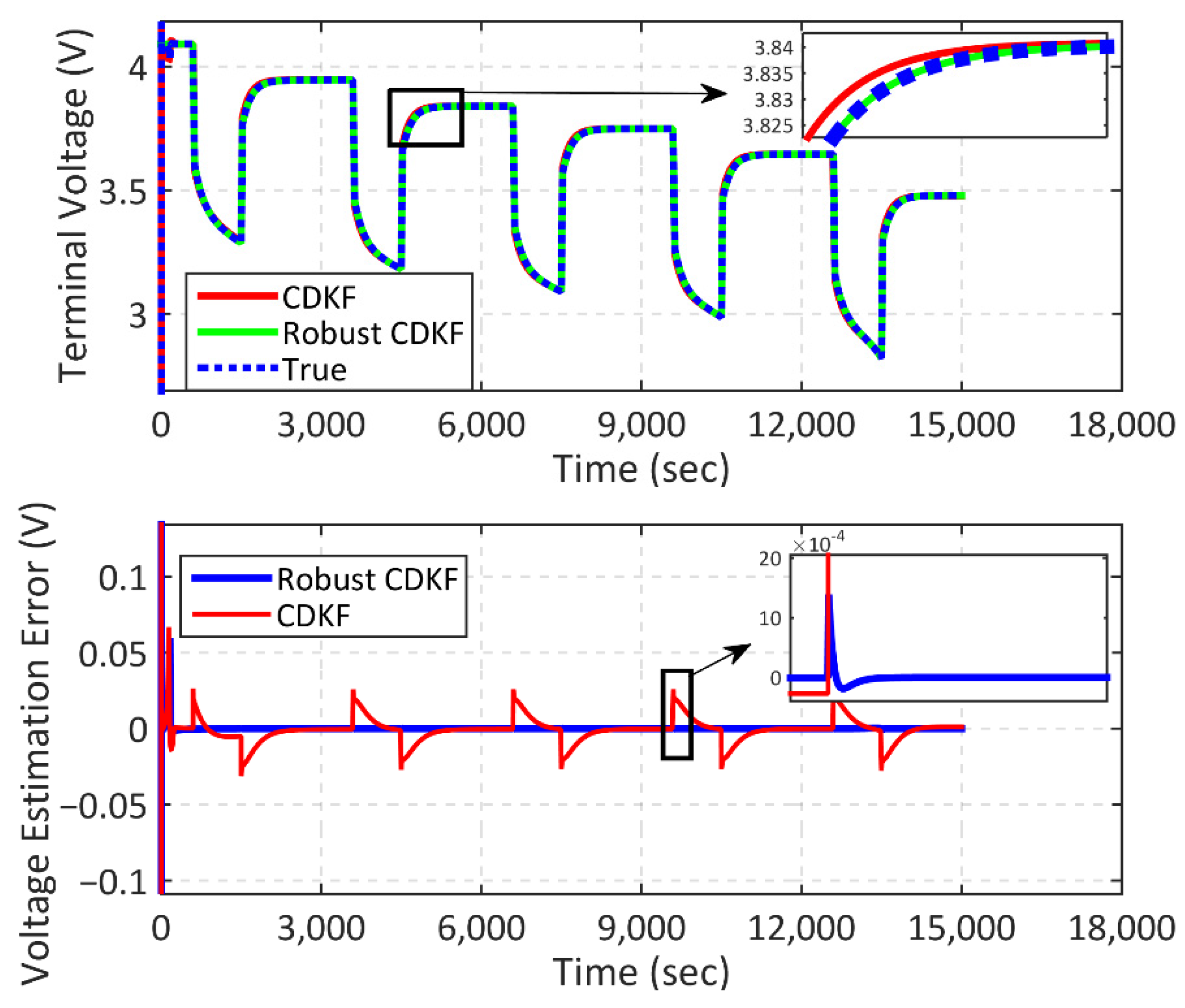
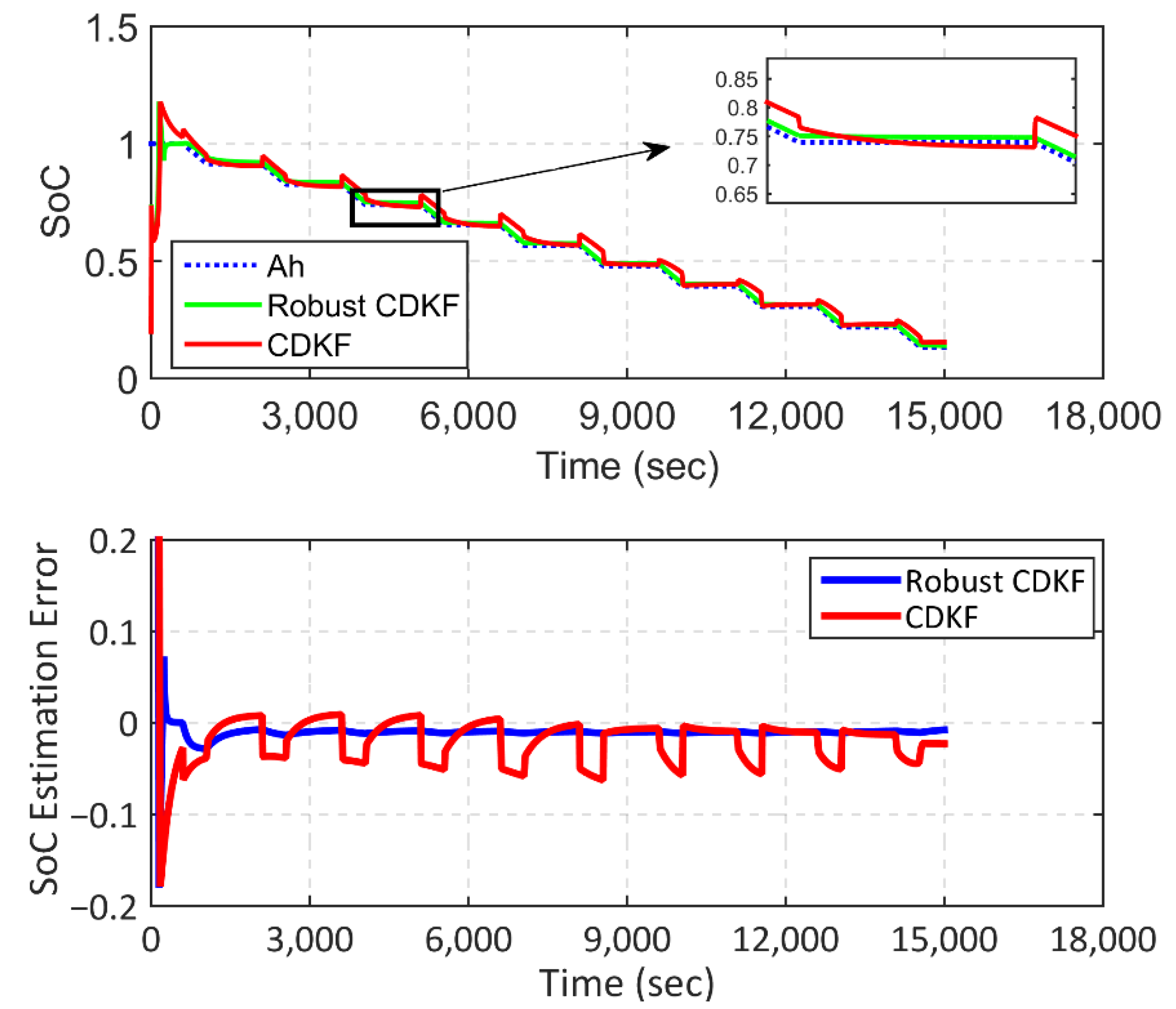
4.4.2. Experimental Tests for the Aged Battery
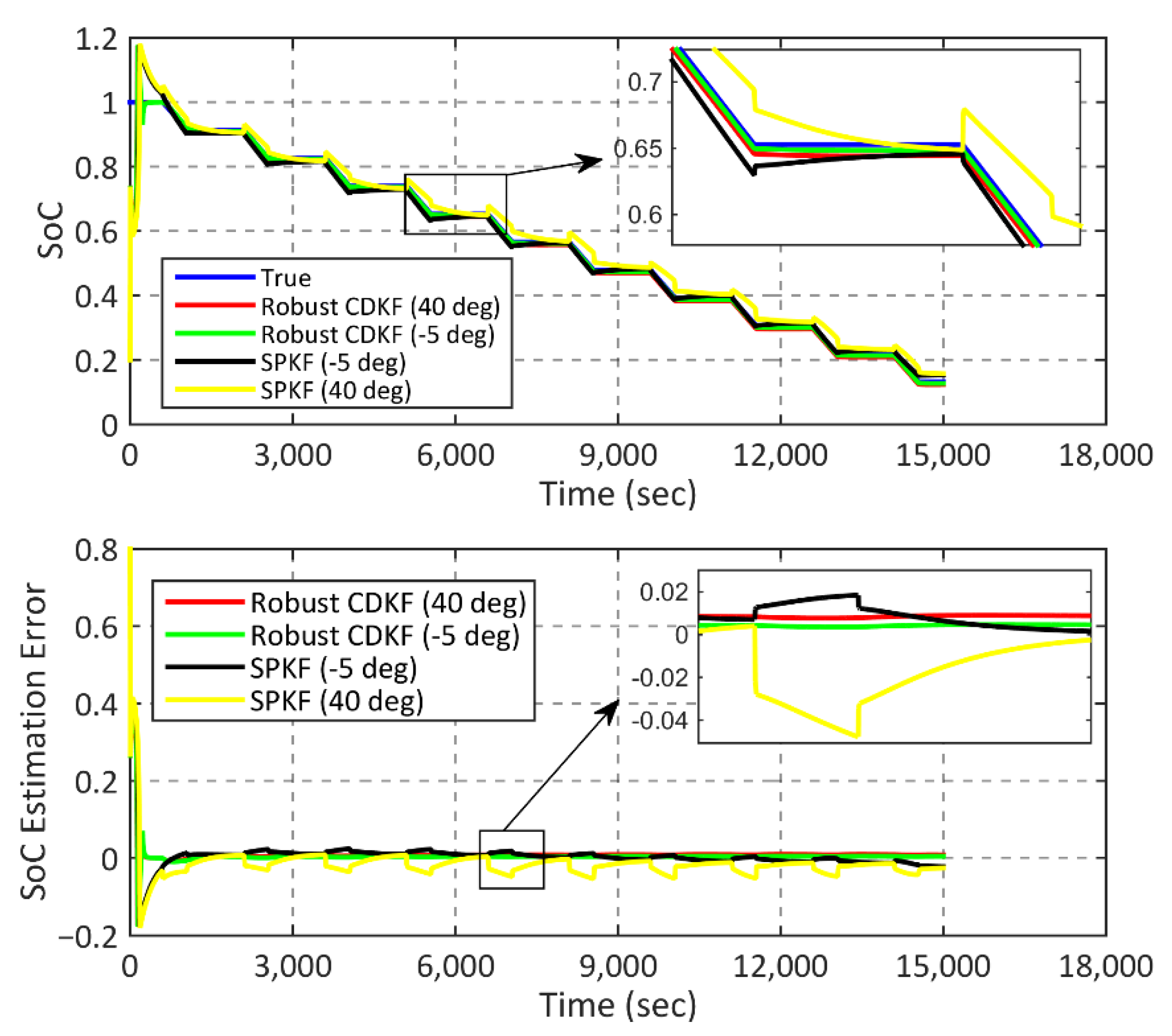
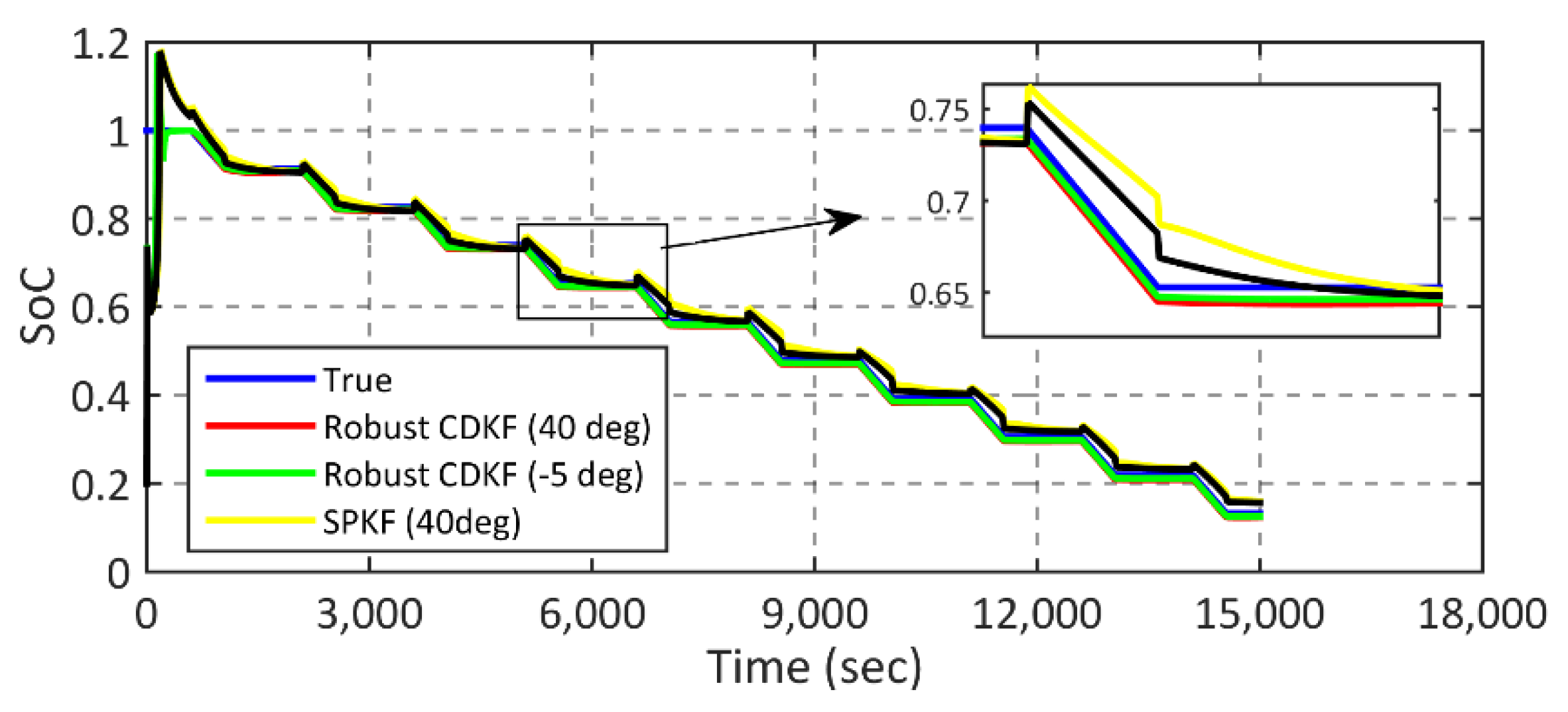
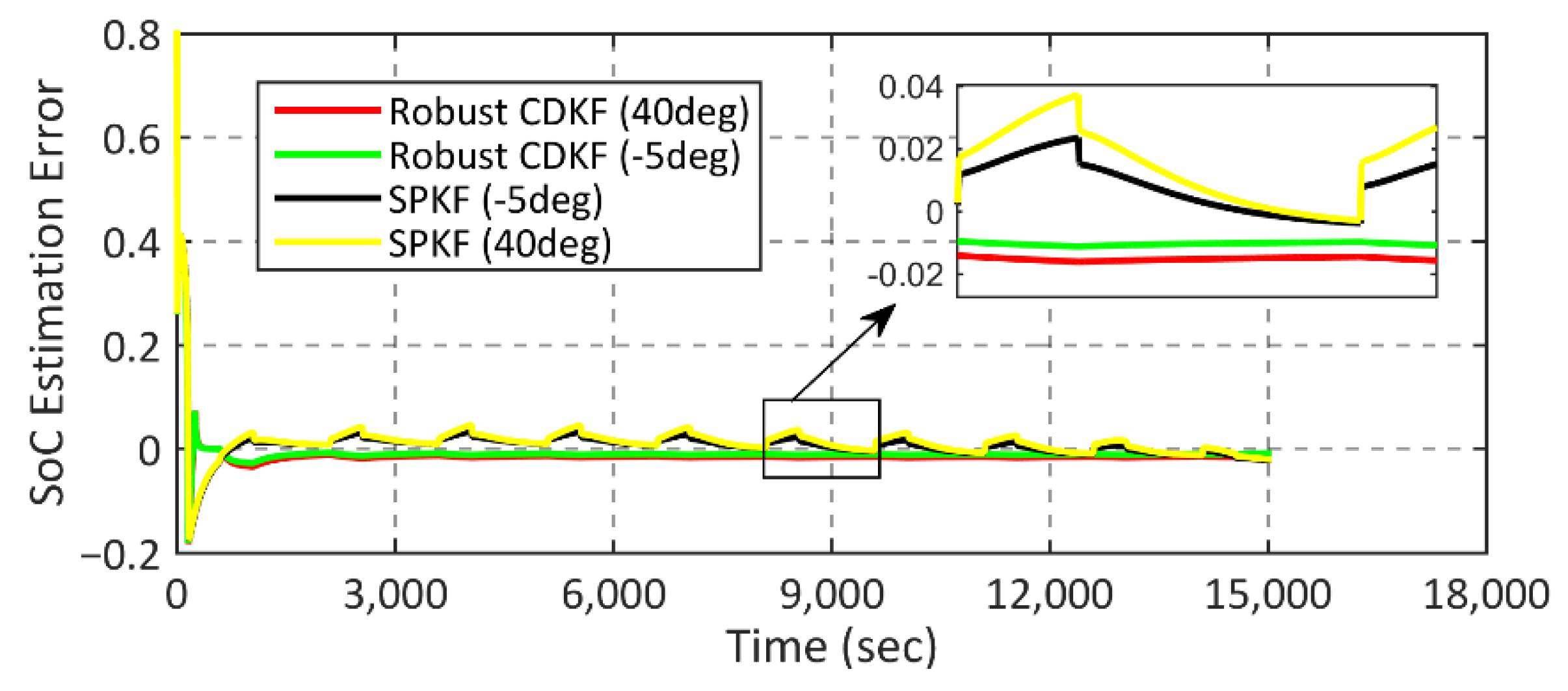
4.4.3. Experimental Tests for Cell-to-Cell and Temperature Variations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Nominal Voltage | 3.7 V |
| Discharge Cut-off Voltage | 3.0 V |
| Max Charge Voltage | 4.20 ± 0.05 V |
| Standard Charge Current | 0.52 A |
| Rapid Charge Current | 1.3 A |
| Standard Discharge Current | 0.52 A |
| Rapid Discharge Current | 1.3 A |
| Max Pulse Discharge Current | 2.6 A |
| Weight | 46.5 ± 1 g |
| Max. Dimension | Diameter (Ø): 18.4 mm Height (H): 65.2 mm |
| Operating Temperature | Charge: 0~45 °C Discharge: −20~60 °C |
| Storage Temperature | During 1 month: −5~35 °C During 6 months: 0~35 °C |
| Cathode | Metal oxide |
| Anode | Consists of porous carbon |
References
- Zubi, G.; Dufo-López, R.; Pardo, N.; Pasaoglu, G. Concept development and techno-economic assessment for a solar home system using lithium-ion battery for developing regions to provide electricity for lighting and electronic devices. Energy Convers. Manag. 2016, 122, 439–448. [Google Scholar] [CrossRef]
- Piller, S.; Perrin, M.; Jossen, A. Methods for state-of-charge determination and their applications. J. Power Sources 2001, 96, 113–120. [Google Scholar] [CrossRef]
- Rezaei, O.; Alinejad, M.; Nejati, S.A.; Chong, B. An optimized adaptive estimation of state of charge for Lithium-ion battery based on sliding mode observer for electric vehicle application. In Proceedings of the 2020 8th International Conference on Intelligent and Advanced Systems (ICIAS), Kuching, Malaysia, 13–15 July 2021; pp. 1–6. [Google Scholar]
- Pei, L.; Lu, R.; Zhu, C. Relaxation model of the open-circuit voltage for state-of-charge estimation in lithium-ion batteries. IET Electr. Syst. Transp. 2013, 3, 112–117. [Google Scholar] [CrossRef]
- Cheng, M.W.; Lee, Y.S.; Liu, M.; Sun, C.C. State-of-charge estimation with aging effect and correction for lithium-ion battery. IET Electr. Syst. Transp. 2015, 5, 70–76. [Google Scholar] [CrossRef]
- Espedal, I.B.; Jinasena, A.; Burheim, O.S.; Lamb, J.J. Current trends for state-of-charge (SoC) estimation in lithium-ion battery electric vehicles. Energies 2021, 14, 3284. [Google Scholar] [CrossRef]
- Cuadras, A.; Kanoun, O. SoC Li-ion battery monitoring with impedance spectroscopy. In Proceedings of the 6th IEEE International Multi-Conference on Systems, Signals and Device, Djerba, Tunisia, 23–26 March 2009; Volume 5, pp. 1–5. [Google Scholar]
- Gholizadeh, M.; Yazdizadeh, A. State of charge estimation of a lithium-ion battery using robust nonlinear observer approach. IET Electr. Syst. Transp. 2018, 9, 1–7. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhou, D.; Xiong, N.; Zhu, Q. Non-fragile H∞ nonlinear observer for state of charge estimation of lithium-ion battery based on a fractional-order model. Energies 2021, 14, 4771. [Google Scholar] [CrossRef]
- Ebrahimi, F.; Abedi, M. Design of a robust central difference Kalman filter in the presence of uncertainties and unknown measurement errors. Signal Process. 2020, 172, 107533. [Google Scholar] [CrossRef]
- Yao, J.; Ding, J.; Cheng, Y.; Feng, L. Sliding mode-based H-infinity filter for SOC estimation of lithium-ion batteries. Ionics 2021, 27, 5147–5157. [Google Scholar] [CrossRef]
- Chen, N.; Zhang, P.; Dai, J.; Gui, W. Estimating the state-of-charge of lithium-ion battery using an H-infinity observer based on electrochemical impedance model. IEEE Access 2020, 8, 26872–26884. [Google Scholar] [CrossRef]
- Verbrugge, M.; Tate, E. Adaptive state of charge algorithm for nickel metal hydride batteries including hysteresis phenomena. J. Power Sources 2004, 126, 236–249. [Google Scholar] [CrossRef]
- Chen, Z.; Sun, H.; Dong, G.; Wei, J.; Wu, J.I. Particle filter-based state-of-charge estimation and remaining-dischargeable-time prediction method for lithiumion batteries. J. Power Source 2019, 414, 158–166. [Google Scholar] [CrossRef]
- Xia, B.; Chen, C.; Tian, Y.; Sun, W.; Xu, Z.; Zheng, W. A novel method for state of charge estimation of lithium-ion batteries using a nonlinear observer. J. Power Sources 2014, 270, 359–366. [Google Scholar] [CrossRef]
- Hu, Y.; Yurkovich, S. Battery cell state-of-charge estimation using linear parameter varying system techniques. J. Power Sources 2012, 198, 338–350. [Google Scholar] [CrossRef]
- Gholizadeh, M.; Salmasi, F.R. Estimation of state of charge, unknown nonlinearities, and state of health of a lithium-ion battery based on a comprehensive unobservable model. IEEE Trans. Ind. Electron. 2013, 61, 1335–1344. [Google Scholar] [CrossRef]
- Rezaei, O.; Moghaddam, H.A.; Papari, B. A fast sliding-mode-based estimation of state-of-charge for lithium-ion batteries for electric vehicle applications. J. Energy Storage 2022, 45, 103484. [Google Scholar] [CrossRef]
- Zhong, Q.; Zhong, F.; Cheng, J.; Li, H.; Zhong, S. State of charge estimation of lithium-ion batteries using fractional order sliding mode observer. ISA Trans. 2017, 66, 448–459. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Shen, W.; Cao, Z.; Kapoor, A. A novel approach for state of charge estimation based on adaptive switching gain sliding mode observer in electric vehicles. J. Power Sources 2014, 246, 667–678. [Google Scholar] [CrossRef]
- Chan, C.C.; Lo, E.W.C.; Shen, W. The available capacity computation model based on artificial neural network for lead–acid batteries in electric vehicles. J. Power Sources 2000, 87, 201–204. [Google Scholar] [CrossRef]
- Shen, W.X.; Chan, C.C.; Lo, E.W.C.; Chau, K.T. A new battery available capacity indicator for electric vehicles using neural network. Energy Convers. Manag. 2002, 43, 817–826. [Google Scholar] [CrossRef]
- Yang, F.; Li, W.; Li, C.; Miao, Q. State-of-charge estimation of lithium-ion batteries based on gated recurrent neural network. Energy 2019, 175, 66–75. [Google Scholar] [CrossRef]
- Habibifar, R.; Karimi, M.R.; Ranjbar, H.; Ehsan, M. Economically based distributed battery energy storage systems planning in microgrids. In Proceedings of the Iranian Conference on Electrical Engineering (ICEE), Mashhad, Iran, 8–10 May 2018; pp. 1257–1263. [Google Scholar]
- Charkhgard, M.; Farrokhi, M. State-of-charge estimation for lithium-ion batteries using neural networks and EKF. IEEE Trans. Ind. Electron. 2010, 57, 4178–4187. [Google Scholar] [CrossRef]
- Xu, P.; Liu, B.; Hu, X.; Ouyang, T.; Chen, N. State-of-charge estimation for lithium-ion batteries based on fuzzy information granulation and asymmetric Gaussian membership function. IEEE Trans. Ind. Electron. 2021, 69, 6635–6644. [Google Scholar] [CrossRef]
- Huang, Z.; Fang, Y.; Xu, J. SoC estimation of li-ion battery based on improved EKF algorithm. Int. J. Automot. Technol. 2021, 22, 335–340. [Google Scholar] [CrossRef]
- Hannan, M.A.; How, D.N.; Lipu, M.S.; Mansor, M.; Ker, P.J.; Dong, Z.Y.; Sahari, K.S.M.; Tiong, S.K.; Muttaqi, K.M.; Mahlia, T.M.; et al. Deep learning approach towards accurate state of charge estimation for lithium-ion batteries using self-supervised transformer model. Sci. Rep. 2021, 11, 1–13. [Google Scholar] [CrossRef]
- Lipu, M.S.H.; Hannan, M.A.; Hussain, A.; Saad, M.H.; Ayob, A.; Uddin, M.N. Extreme learning machine model for state-of-charge estimation of lithium-ion battery using gravitational search algorithm. IEEE Trans. Ind. Appl. 2019, 55, 4225–4234. [Google Scholar] [CrossRef]
- Chemali, E.; Kollmeyer, P.J.; Preindl, M.; Emadi, A. State-of-charge estimation of Li-ion batteries using deep neural networks: A machine learning approach. J. Power Sources 2018, 400, 242–255. [Google Scholar] [CrossRef]
- Yang, K.; Tang, Y.; Zhang, S.; Zhang, Z. A deep learning approach to state of charge estimation of lithium-ion batteries based on dual-stage attention mechanism. Energy 2022, 244, 123233. [Google Scholar] [CrossRef]
- Bian, C.; Yang, S.; Miao, Q. Cross-domain state-of-charge estimation of Li-ion batteries based on deep transfer neural network with multiscale distribution adaptation. IEEE Trans. Transp. Electrif. 2020, 7, 1260–1270. [Google Scholar] [CrossRef]
- Li, W.; Yang, Y.; Wang, D.; Yin, S. The multi-innovation extended Kalman filter algorithm for battery SOC estimation. Ionics 2020, 26, 6145–6156. [Google Scholar] [CrossRef]
- Malysz, P.; Gu, R.; Ye, J.; Yang, H.; Emadi, A. State-of-charge and state-of-health estimation with state constraints and current sensor bias correction for electrified powertrain vehicle batteries. IET Electr. Syst. Transp. 2016, 6, 136–144. [Google Scholar] [CrossRef]
- Gholizadeh, M.; Yazdizadeh, A. Systematic mixed adaptive observer and EKF approach to estimate SOC and SOH of lithium–ion battery. IET Electr. Syst. Transp. 2019, 10, 135–143. [Google Scholar] [CrossRef]
- Kim, J.; Cho, B.H. State-of-charge estimation and state-of-health prediction of a Li-ion degraded battery based on an EKF combined with a per-unit system. IEEE Trans. Veh. Technol. 2011, 60, 4249–4260. [Google Scholar] [CrossRef]
- Xiong, R.; He, H.; Sun, F.; Zhao, K. Evaluation on state of charge estimation of batteries with adaptive extended Kalman filter by experiment approach. IEEE Trans. Veh. Technol. 2012, 62, 108–117. [Google Scholar] [CrossRef]
- Li, J.; Ye, M.; Gao, K.; Jiao, S.; Xu, X. A novel battery state estimation model based on unscented Kalman filter. Ionics 2021, 27, 2673–2683. [Google Scholar] [CrossRef]
- Sun, F.; Hu, X.; Zou, Y.; Li, S. Adaptive unscented Kalman filtering for state of charge estimation of a lithium-ion battery for electric vehicles. Energy 2011, 36, 3531–3540. [Google Scholar] [CrossRef]
- Plett, G. Sigma-point Kalman filtering for battery management systems of LIPB-based HEV battery packs: Part 2: Simultaneous state and parameter estimation. J. Power Source 2006, 161, 1369–1384. [Google Scholar] [CrossRef]
- Sangwan, V.; Kumar, R.; Rathore, A.K. State-of-charge estimation for Li-ion battery using extended Kalman filter (EKF) and central difference Kalman filter (CDKF). In Proceedings of the 2017 IEEE Industry Applications Society Annual Meeting, Cincinnati, OH, USA, 1–5 October 2017; pp. 1–6. [Google Scholar]
- Chen, D.; Wang, C.; Zhu, Z.; Zou, Z. Lithium battery state-of-charge estimation based on interactive multi-model unscented Kalman filter Algorithm. Energy Storage Sci. Technol. 2020, 9, 257. [Google Scholar]
- Chen, M.; Rincon-Mora, G.A. Accurate electrical battery model capable of predicting runtime and IV performance. IEEE Trans. Energy Convers. 2006, 21, 504–511. [Google Scholar] [CrossRef]















| Method | Advantages | Disadvantages |
|---|---|---|
| Ampere-hour (Ah) counting approach | Low computation, inexpensive, and simple implementation | Accumulating errors |
| Impedance measurement method | Low computation, inexpensive, and simple implementation | Sensitivity to temperature change and time-consuming process |
| Artificial intelligence algorithms (Deep learning and Machine learning) | No requirement for the model of the battery | Requirement for massive and reliable training data, expensive GPU, distribution of the training and test data |
| KF-based methods | Estimation in the presence of the measurement and process noises | Need for the accurate model of the battery and information about the measurement and process noises |
| H∞ observer | SoC estimation without information about the battery’s statistical characteristics | Calculations need powerful processors |
| Sliding mode based observers | Robustness against model uncertainty | Low convergence speed and chattering phenomena |
| Proposed Method | Robustness against model uncertainty, estimation in the presence of the measurement and process noises, high convergence speed, no need for the training data, and no need for expensive processors | Time-consuming tuning of the covariance matrices of the process and measurement noises because of the colored noises in the noisy environment |
| Parameter | Value |
|---|---|
| (Ω) | 100 |
| (m Ω) | 88 |
| (m Ω) (m Ω) | 2.8 41.2 |
| (F) | 8640 |
| (F) (F) | 37 1376 |
| Fresh/Aged | Method | SoC Estimation | Terminal Voltage Estimation |
|---|---|---|---|
| Fresh battery | Robust CDKF (500 s) | 0.1% | ~0 V |
| CDKF (500 s) | 2% | 0.05 V (pick to pik) | |
| Robust CDKF (1000 s) | 0.1% | ~0 V | |
| CDKF (1000 s) | 2% | 0.04 V (pick to pik) | |
| Aged battery | Robust CDKF | 1% | 0.001 V |
| CDKF | 5% | 0.1 V (pick to pik) |
| Parameter | Value |
|---|---|
| (Ω) | 109 |
| (m Ω) | 86 |
| (m Ω) (m Ω) | 2.4 43.4 |
| (F) | 8640 |
| (F) (F) | 35 1377 |
| Parameter | Value |
|---|---|
| (Ω) | 98 |
| (m Ω) | 89 |
| (m Ω) (m Ω) | 2.1 40 |
| (F) | 8640 |
| (F) (F) | 39 1379 |
| Robust CDKF | SPKF | CDKF | |
|---|---|---|---|
| Cell #1—Fresh (Room temp) | 0.1% | - | 2% |
| Cell #1—Aged (Room temp) | 1% | 5% | |
| Cell #2 (−5 deg) | 0.5% | 2.5% | - |
| Cell #2 (40 deg) | 1% | 5% | - |
| Cell #3 (−5 deg) | 0.7% | 3% | - |
| Cell #3 (40 deg) | 1.1% | 4% | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rezaei, O.; Habibifar, R.; Wang, Z. A Robust Kalman Filter-Based Approach for SoC Estimation of Lithium-Ion Batteries in Smart Homes. Energies 2022, 15, 3768. https://doi.org/10.3390/en15103768
Rezaei O, Habibifar R, Wang Z. A Robust Kalman Filter-Based Approach for SoC Estimation of Lithium-Ion Batteries in Smart Homes. Energies. 2022; 15(10):3768. https://doi.org/10.3390/en15103768
Chicago/Turabian StyleRezaei, Omid, Reza Habibifar, and Zhanle Wang. 2022. "A Robust Kalman Filter-Based Approach for SoC Estimation of Lithium-Ion Batteries in Smart Homes" Energies 15, no. 10: 3768. https://doi.org/10.3390/en15103768
APA StyleRezaei, O., Habibifar, R., & Wang, Z. (2022). A Robust Kalman Filter-Based Approach for SoC Estimation of Lithium-Ion Batteries in Smart Homes. Energies, 15(10), 3768. https://doi.org/10.3390/en15103768