
Full Simulation Modeling of All-Electric Ship with Medium Voltage DC Power System


Abstract
:1. Introduction
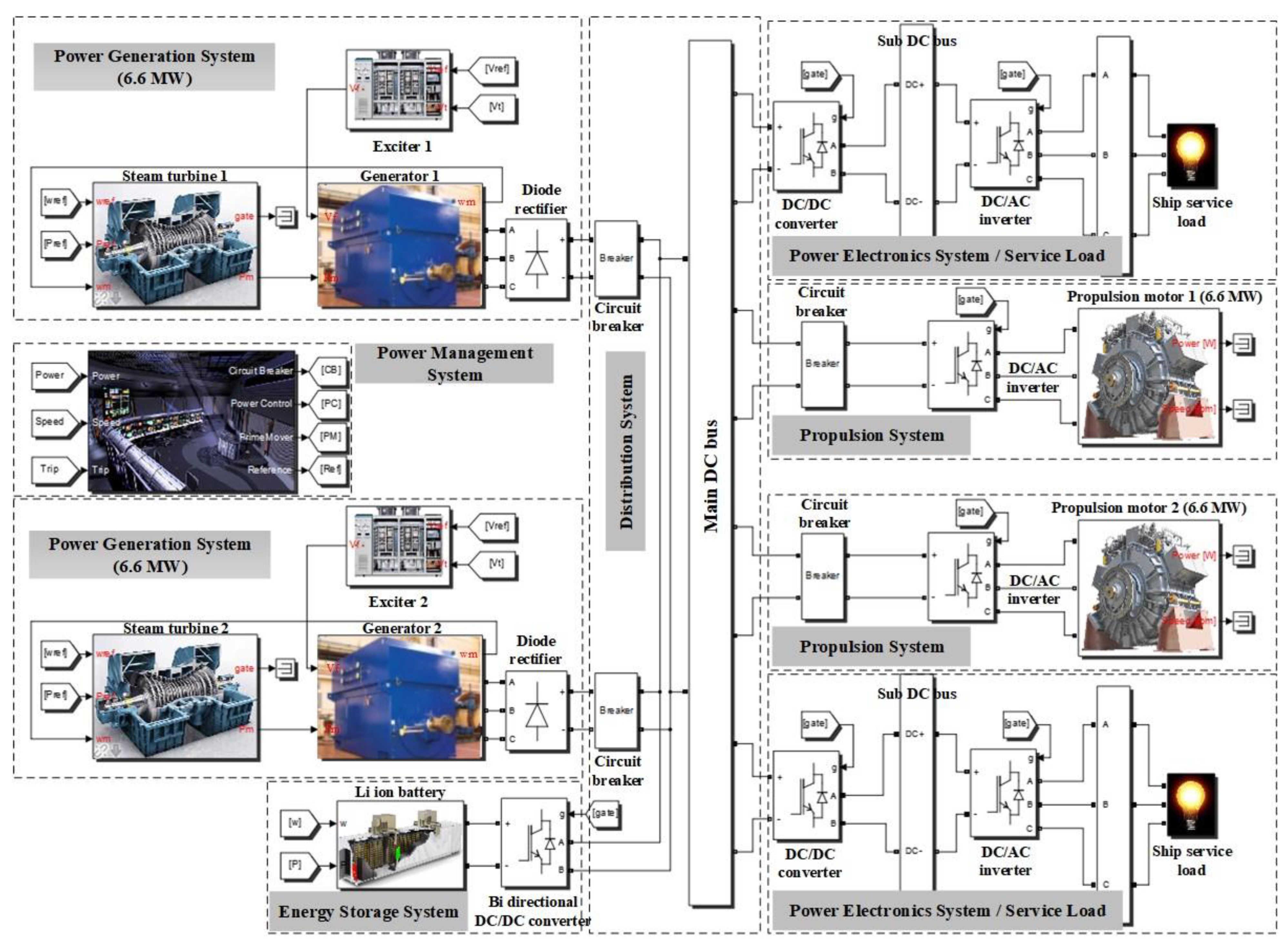
2. System Configuration and Modeling
2.1. Power Generation System
2.2. Propulsion System
2.3. Power Electronics System
2.4. Energy Storage System
2.5. Power Management System
3. Modeling of Integrated Power System
- Acceleration and deceleration (ACC&DEC): Figure 7a shows that the two turbine generators set are initially operating to supply the service load of 10% rated power. Then after 10 s, a 7 %/s acceleration of the propulsion motor is introduced to the system until it reaches to 80% rate power, where it stays for 10 s. Starting from this point, a 7 %/s deceleration is applied to the system, until it finally settles to 10% rated power.
- Loss of prime mover trip (LPMT): 80% of the propulsion power demand is presented in Figure 7b. The circuit breaker for one of the two turbine generators is tripped. The propulsion motors operate at a reduced load, then immediately restored to a power level that is sustainable by the remaining one turbine generator. During this procedure, the turbine generator shall adjust its output power according to the reduced load demand.
- Full propulsion load rejection (FPLR): As shown in Figure 7c, this condition denotes the loss of the full propulsion load. Load rejection is initiated at 30 s with 80% of the propulsion power load. The supply frequency varies directly with the steam turbine speed and frequency because the shaft of the generator is directly coupled to the steam turbine.
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
- (1)

- (2)


- (3)
- Synchronous generator: based on d-q equivalent circuit with 6.6 MW, 4160 V, 60 Hz, .
- (4)
- 3-phase permanent magnet motor: 12 MW, 150 rpm, .
- (5)
- 3-phase DC/AC PWM inverter: .
- (6)

- (7)
- DC/AC inverter, DC/DC converter: 3 phase DC/AC inverter for AC ship service load (300 kW/450 V/60 Hz), buck converter for DC ship service load (200 kW/200 V), bidirectional DC/DC converter between DC bus and Energy storage system.
- (8)
- Ship service load: 1 MW (capacitive, inductive, resistive) RLC load
- (9)
- Li-ion battery: 2 MW/500 kW, 4 C/rate, Li-ion battery charging/discharging comprehensive modeling

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Value |
|---|---|
| Nominal capacity | 31.5 Ah |
| Nominal voltage | 43.2 V |
| Charge limit | 49.2 V |
| Discharge limit | 30.0 V |
| Energy | 1.3 kWh |
| Maximum discharge current | 200 A |
- , ,
- ,,
- , ,
- ,
- , .


References
- Kalsi, S.S.; Nayal, O. Ship electrical system simulation. In Proceedings of the IEEE Electric Ship Technologies Symposium, Philadelphia, PA, USA, 27 July 2005. [Google Scholar] [CrossRef]
- Hebner, R.E. Electric ship power system—Research at the University of Texas at Austin. In Proceedings of the IEEE Electric Ship Technologies Symposium, Philadelphia, PA, USA, 27 July 2005. [Google Scholar]
- Ku, H.K.; Seo, H.R.; Kim, J.M. Full simulation modeling for electrical analysis of all electric ships with medium voltage DC power system. In Proceedings of the 2015 9th International Conference on Power Electronics and ECCE Asia, Seoul, Korea, 1–5 June 2015; pp. 1955–1960. [Google Scholar]
- Norbert Doerry CAPT. Open Architecture Approach for the Next Generation Integrated Power System. In Proceedings of the ASNE Automation and Controls Symposium 2007, Biloxi, MS, USA, 10–11 December 2007. [Google Scholar]
- Zahedi, B.; Norum, L.E. Modeling and simulation of all-electric ships with low-voltage DC hybrid power systems. IEEE Trans. Power Electron. 2013, 28, 4525–4537. [Google Scholar] [CrossRef]
- Sulligoi, G.; Bosich, D.; Zhu, L.; Cupelli, M.; Monti, A. Linearizing Control of Shipboard Multi-Machine MVDC Power Systems feeding Constant Power Loads. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012. [Google Scholar]
- Arcidiacono, V.; Monti, A.; Sulligoi, G. Generation control system for improving design and stability of medium-voltage DC power systems on ships. Electr. Syst. Transp. IET 2012, 3, 158–167. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, C.; Kong, X.; Zhang, H. Research on Transient Stability Simulation of Ship Power System. Adv. Mater. Res. 2012, 383–390, 2055–2059. [Google Scholar] [CrossRef]
- Jeon, W.; Wang, Y.P.; Jung, S.Y. Dynamic Characteristic Analysis at Each Operating Condition for Electric Ship Propulsion System. J. Korean Soc. Mar. Eng. 2008, 32, 1296–1302. [Google Scholar]
- Kulkarni, S.; Santoso, S. Estimating Transient Response of Simple AC and DC Shipboard Power Systems to Pulse Load Operations. In Proceedings of the IEEE Electric Ship Technologies Symposium, Baltimore, MD, USA, 20–22 April 2009. [Google Scholar]
- Sulligoi, G.; Bosich, D.; Arcidiacono, V.; Giadrossi, G. Considerations on the Design of Voltage Control for Multi-Machine MVDC Power Systems on Large Ships. In Proceedings of the 2013 IEEE Electric Ship Technologies Symposium (ESTS), Arlington, VA, USA, 22–24 April 2013. [Google Scholar]
- Sulligoi, G.; Vicenzutti, A.; Arcidiacono, V.; Khersonsky, Y. Voltage Stability in Large Marine-Integrated Electrical and Electronic Power Systems. IEEE Trans. Ind. Appl. 2016, 52, 3584–3594. [Google Scholar] [CrossRef]
- Sulligoi, G.; Vicenzutti, A.; Menis, R. All-Electric Ship Design: From Electrical Propulsion to Integrated Electrical and Electronic Power Systems. IEEE Trans. Trans. Elec. 2016, 2, 3584–3594. [Google Scholar] [CrossRef]
- Alafnan, H.; Zhang, M.; Yuan, W.; Zhu, J.; Li, J.; Elshiekh, M.; Li, X. Stability Improvement of DC Power Systems in an All-Electric Ship Using Hybrid SMES/Battery. IEEE Trans. Appl. Supercon. 2018, 28, 5700306. [Google Scholar] [CrossRef] [Green Version]
- Xu, Q.; Yang, B.; Han, Q.; Yuan, Y.; Chen, C.; Guan, X. Optimal Power Management for Failure Mode of MVDC Microgrids in All-Electric Ships. IEEE Trans. Pow. Sys. 2018, 34, 1054–1067. [Google Scholar] [CrossRef] [Green Version]
- IEEE Committee Report. Dynamic Models for Steam and Hydro Turbines in Power System Studies. IEEE Trans. Power Appar. Syst. 1973, 6, 1904–1915. [Google Scholar]
- Krause, P.C. Analysis of Electric Machinery, Section 12.5; McGraw-Hill: New York NY, USA, 1986. [Google Scholar]
- IEEE Std 421.5-2005; IEEE Recommended Practice for Excitation System Models for Power System Stability Studies, Energy Development and Power Generation Committee of the IEEE Power Engineering Society, 2005. IEEE: Piscataway, NJ, USA, 2016.
- Mohan, N.; Undeland, T.M.; Robbins, W.P. Power Electronics: Converters, applications and Design; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1995. [Google Scholar]
- Erickson, R.W. Fundamentals of Power Electronics; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Sul, S.K. Control of Electric Machine Drive Systems; Wiley: New York, NY, USA, 2010. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; Wiley: New York, NY, USA, 2011. [Google Scholar]
- Zahedi, B.; Norum, L.E. Modelling and Simulation of Hybrid Electric Ships with DC Distribution Systems, Norwegian University of Science and Technology (NTNU). In Proceedings of the 2013 15th European Conference on Power Electronics and Applications (EPE), Lille, France, 2–6 September2013. [Google Scholar]
- Perez, T.; Smogeli, O.; Fossen, T.; Sorensen, A.J. An Overview of the Marine Systems Simulator (MSS): A Simulink Toolbox for Marine Control Systems. Modeling Identif. Control 2006, 27, 259–275. [Google Scholar] [CrossRef] [Green Version]
- Monti, A.; Darco, S.; Gao, L.; Dougal, R.A. Energy storage management as key issue in control of power systems in future all electric ships. In Proceedings of the 2008 International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Ischia, Italy, 11–13 June 2008; pp. 580–585. [Google Scholar]
- Hebner, R.E.; Herbst, J.; Gattozzi, A. Large scale simulations of a ship power system with energy storage and multiple directed energy loads. In Proceedings of the 2010 Grand Challenges in Modeling & Simulation (GCMS 2010), Ottawa, ON, Canada, 11–14 July 2010; pp. 430–435. [Google Scholar]
- Pascal, M.; Rachid, C.; Alexandre, O. Optimizing a battery energy storage system for frequency control application in an isolated power system. IEEE Trans. Power Syst. 2009, 24, 1469–1477. [Google Scholar]
- Hebner, R.E.; Davey, K.; Herbst, J.; Hall, D.; Hahne, J.; Surls, D.D.; Ouroua, A. Dynamic Load and Storage Integration. Proc. IEEE 2015, 103, 2344–2354. [Google Scholar] [CrossRef] [Green Version]
- Jadric, I.; Borojevic, D.; Jadric, M. Modeling and control of a synchronous generator with an active DC load. IEEE Trans. Power Elec. 2000, 15, 303–311. [Google Scholar] [CrossRef]
- Khan, M.M.S.; Faruque, M.O.; Newaz, A. Fuzzy Logic Based Energy Storage Management System for MVDC Power System of All Electric Ship. IEEE Trans. Energy Conv. 2017, 32, 798–809. [Google Scholar] [CrossRef] [Green Version]
- Seenumani, G.; Sun, J.; Peng, H. A hierarchical optimal control strategy for power management of hybrid power systems in all electric ships applications. In Proceedings of the 2010 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 3972–3977. [Google Scholar]
- Qunying, S.; Ramachandran, B.; Srivastava, S.K.; Andrus, M.; Cartes, D.A. Power and Energy Management in Integrated Power System. In Proceedings of the 2011 IEEE Electric Ship Technologies Symposium (ESTS), Alexandria, VA, USA, 10–13 April 2011; pp. 414–419. [Google Scholar]
- Damir, R. Integrated Control of Marine Electrical Power Systems. Fakultet for Ingeniørvitenskap Og Teknologi: Trondheim, Norway; ISBN 978-82-471-6647-5.
- IEEE Standard 1662-2008; Guide for the Design and Application of Power Electronics in Electrical Power Systems on Ships. IEEE: Piscataway, NJ, USA, 2009.
- Chua, L.W.Y.; Tjahjowidodo, T.; Seet, G.G.L.; Chan, R. Implementation of Optimization-Based Power Management for All-Electric Hybrid Vessels. IEEE Access 2018, 6, 74339–74354. [Google Scholar] [CrossRef]
- Satpathi, K.; Ukil, A.; Nag, S.S.; Pou, J.; Zagrodnik, M.A. DC Marine Power System: Transient Behavior and Fault Management Aspects. IEEE Trans. Indus. Inform. 2019, 15, 1911–1925. [Google Scholar] [CrossRef]
- IEEE Std 45-1998; IEEE Recommended Practice for Electrical Installation on Shipboard. IEEE: Piscataway, NJ, USA, 1998.
- IEEE Std 1709-2010; IEEE Recommended Practice for 1kV to 35kV Medium-Voltage DC Power Systems on Ships, DC Power Systems on Ships Working Group of the IEEE Industry Applications Society Petroleum & Chemical Industry (IAS/PCI) Committee. IEEE: Piscataway, NJ, USA, 2010.
- STANAG 1008 Characteristics of Shipboard Electrical Power Systems in Warships of the North Atlantic Treaty Navies, 9th ed.; NATO: Brussels, Belgium, 2004.
- MIL-STD-1399, Section 680; Navy High Voltage Power, Alternating Current. Department of Defense: Arlington, VA, USA, 24 April 2008.











| System | Components (Unit) |
|---|---|
| Power Generation |
|
| Propulsion System |
|
| Power Electronics System |
|
| Energy Storage System |
|
| Ship service load, Distribution system, Power management system | |
| Without ES | ACC & DEC | LPMT | FPLR | |||
| Result(P/F) | Error (%) Tran./Stea. | Result(P/F) | Error (%) Tran./Stea. | Result(P/F) | Error (%) Tran./Stea. | |
| Voltage | P | 0.5/1.0 | P | 6.0/1.0 | P | 9.0/1.0 |
| Frequency | F | 6.0/1.5 | F | 9.0/1.5 | F | 35.0/1.0 |
| With ES | ACC & DEC | LPMT | FPLR | |||
| Result(P/F) | Error (%) Tran./Stea. | Result(P/F) | Error (%) Tran./Stea. | Result(P/F) | Error (%) Tran./Stea. | |
| Voltage | P | 0.5/1.0 | P | 6.0/1.0 | P | 9.0/1.0 |
| Frequency | P | 4.2/1.5 | P | 4.5/1.5 | F | 20.0/1.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ku, H.-K.; Park, C.-H.; Kim, J.-M. Full Simulation Modeling of All-Electric Ship with Medium Voltage DC Power System. Energies 2022, 15, 4184. https://doi.org/10.3390/en15124184
Ku H-K, Park C-H, Kim J-M. Full Simulation Modeling of All-Electric Ship with Medium Voltage DC Power System. Energies. 2022; 15(12):4184. https://doi.org/10.3390/en15124184
Chicago/Turabian StyleKu, Hyun-Keun, Chang-Hwan Park, and Jang-Mok Kim. 2022. "Full Simulation Modeling of All-Electric Ship with Medium Voltage DC Power System" Energies 15, no. 12: 4184. https://doi.org/10.3390/en15124184
APA StyleKu, H. -K., Park, C. -H., & Kim, J. -M. (2022). Full Simulation Modeling of All-Electric Ship with Medium Voltage DC Power System. Energies, 15(12), 4184. https://doi.org/10.3390/en15124184