
Semi-3D Analysis of a Permanent Magnet Synchronous Generator Considering Bolting and Overhang Structure

 ,
,  ,
,  , and
, and
Abstract
:1. Introduction
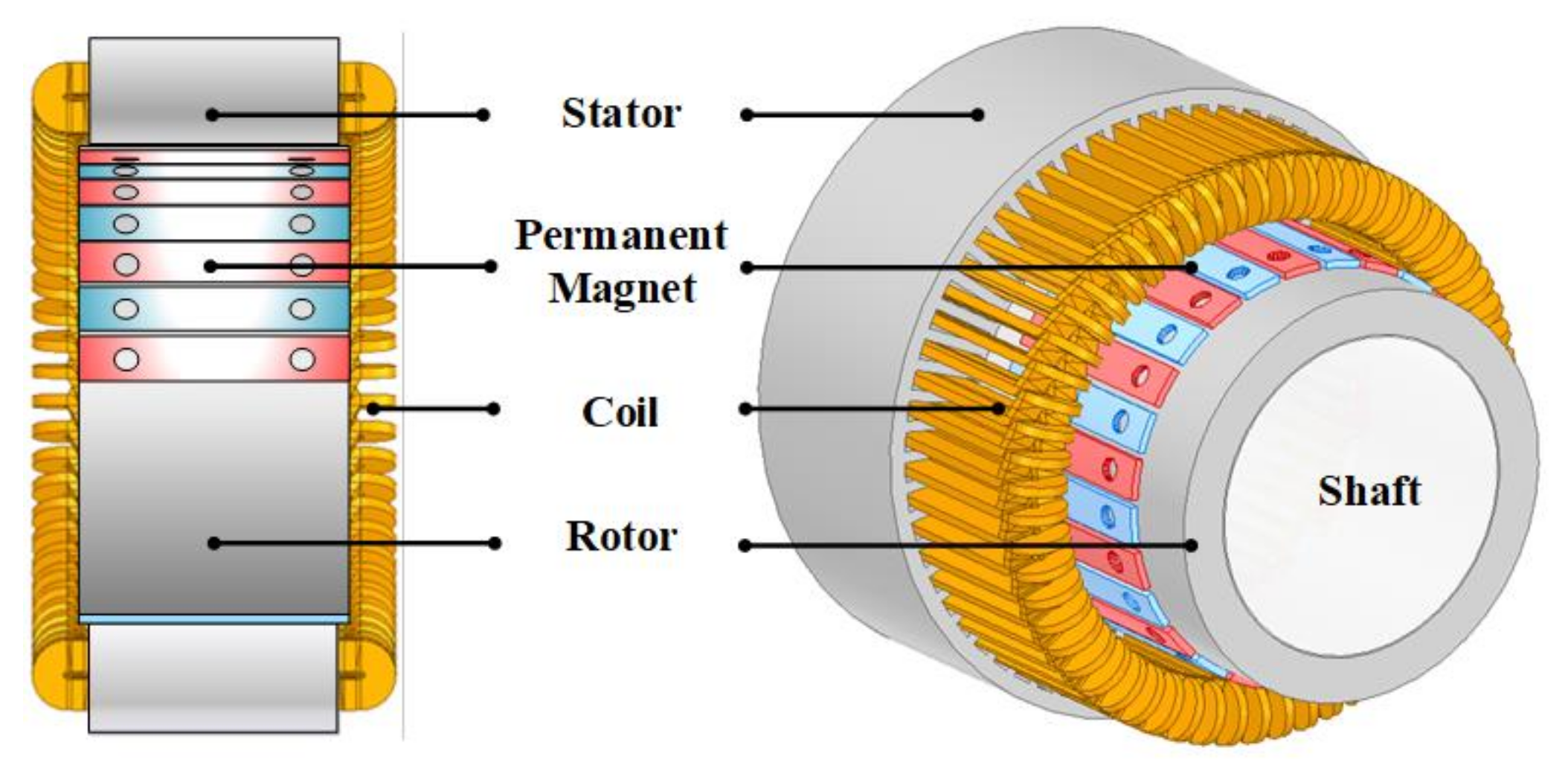
2. Analysis Model
Analysis Model of PMSG and Design Specification
3. A Semi-3D Technique Method
3.1. Magnetic Equivalent Circuit
3.2. Operating Point of PMSG Using Magnetic Energy
3.3. Analysis Method Considering Bolting and Overhang
3.4. Equivalent Circuit Method
4. Analysis and Experiment Results
4.1. Experiment Model
4.2. No-Load Analysis
4.3. AC Load Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hong, K.P.; Kang, G.H.; Lee, S.K. Design of a 6kW permanent magnet synchronous generator with low speed and high torque for gyro wave power generation. J. Korean Soc. Mar. Eng. 2017, 41, 878–883. [Google Scholar]
- O’Sullivan, D.L.; Lewis, A.W. Generator Selection and Comparative Performance in Offshore Oscillating Water Column Ocean Wave Energy Converters. IEEE Trans. Energy Convers. 2011, 26, 603–614. [Google Scholar] [CrossRef]
- Lee, C.W. Calculation of Self and Mutual Inductances in Multi-Phase Permanent Magnet Synchronous Motor. J. Korean Magn. Soc. 2017, 27, 9–17. [Google Scholar] [CrossRef] [Green Version]
- Choi, J.Y.; Kang, H.B.; Hong, S.A. Review of Linear Permanent Magnet Generator for Wave Energy Converter according to Magnetic Circuit Construction. KAOSTS 2014, 2397–2402. [Google Scholar]
- Shin, K.H. Characteristic Analysis of Wave Power Generator Considering Bolting to Fix Permanent Magnet Based on Analytical Method. IEEE Trans. Magn. 2019, 55, 7501805. [Google Scholar] [CrossRef]
- Woo, D.-K.; Lim, D.-K.; Yeo, H.-K.; Ro, J.-S.; Jung, H.-K. A 2-D finite-element analysis for a permanent magnet synchronous motor taking an overhang effect into consideration. IEEE Trans. Magn. 2013, 49, 4894–4899. [Google Scholar] [CrossRef]
- Lee, T.-Y.; Seo, M.-K.; Kim, Y.-J.; Jung, S.-Y. Motor design and characteristics comparison of outer-rotor-type BLDC motor and BLAC motor based on numerical analysis. IEEE Trans. Appl. Supercond. 2016, 26, 5205506. [Google Scholar] [CrossRef]
- Hendershot, J.R., Jr.; Miller, T.J.E. Design of Brushless Permanent-Magnet Motors; Magna Physics Publishing and Clarendon Press: Oxford, UK, 1994. [Google Scholar]
- Chan, T.F.; Lai, L.L.; Yan, L.-T. Performance of a three-phase AC generator with inset NdFeB permanent-magnet rotor. IEEE Trans. Energy Convers. 2004, 19, 88–94. [Google Scholar] [CrossRef]
- Yeo, H.-K.; Lim, D.-K.; Woo, D.-K.; Ro, J.-S.; Jung, H.-K. Magnetic Equivalent Circuit Model Considering Overhang Structure of a Surface-Mounted Permanent-Magnet Motor. IEEE Trans. Magn. 2015, 51, 8201004. [Google Scholar]
- Qu, R.; Lipo, T.A. Analysis and modeling of air-gap and zigzag leakage fluxes in a surface-mounted permanent-magnet Machine. IEEE Trans. Ind. Appl. 2004, 40, 121–127. [Google Scholar] [CrossRef]
- Delmonte, N.; Barater, D.; Giuliani, F.; Cova, P.; Buticchi, G. Review of Oscillating Water Column Converters. IEEE Trans. Ind. Appl. 2016, 52, 1698–1710. [Google Scholar] [CrossRef]
- Ko, Y.; Song, J.; Seo, M.; Han, W.; Kim, Y.; Jung, S. Analytical Method for Overhang Effect of Surface-Mounted Permanent-Magnet Motor Using Conformal Mapping. IEEE Trans. Magn. 2018, 54, 8208005. [Google Scholar] [CrossRef]
- Koo, M.; Choi, J.; Park, Y.; Jang, S. Influence of Rotor Overhang Variation on Generating Performance of Axial Flux Permanent Magnet Machine Based on 3-D Analytical Method. IEEE Trans. Magn. 2014, 50, 8205905. [Google Scholar] [CrossRef]
- Yeo, H.; Ro, J. Novel Analytical Method for Overhang Effects in Surface-Mounted Permanent-Magnet Machines. IEEE Access 2019, 7, 148453–148461. [Google Scholar] [CrossRef]
- Sheikh-Ghalavand, B.; Vaez-Zadeh, S.; Isfahani, A.H. An Improved Magnetic Equivalent Circuit Model for Iron-Core Linear Permanent-Magnet Synchronous Motors. IEEE Trans. Magn. 2010, 46, 112–120. [Google Scholar] [CrossRef]
- Moallem, M.; Dawson, G.E. An improved magnetic equivalent circuit method for predicting the characteristics of highly saturated electromagnetic devices. IEEE Trans. Magn. 1998, 34, 3632–3635. [Google Scholar] [CrossRef]
- Mi, C.; Filippa, M.; Liu, W.; Ma, R. Analytical method for predicting the air-gap flux of interior-type permanent-magnet machines. IEEE Trans. Magn. 2004, 40, 50–58. [Google Scholar] [CrossRef]
- Tsai, W.-B.; Chang, T.-Y. Analysis of flux leakage in a brushless permanent-magnet motor with embedded magnets. IEEE Trans. Magn. 1999, 35, 543–547. [Google Scholar] [CrossRef]
- Hsieh, M.; Hsu, Y. A Generalized Magnetic Circuit Modeling Approach for Design of Surface Permanent-Magnet Machines. IEEE Trans. Ind. Electron. 2012, 59, 779–792. [Google Scholar] [CrossRef]
- Kano, Y.; Kosaka, T.; Matsui, N. Simple nonlinear magnetic analysis for permanent-magnet motors. IEEE Trans. Ind. Appl. 2005, 41, 1205–1214. [Google Scholar] [CrossRef]
- Song, J.; Lee, J.H.; Kim, Y.; Jung, S. Computational Method of Effective Remanence Flux Density to Consider PM Overhang Effect for Spoke-Type PM Motor With 2-D Analysis Using Magnetic Energy. IEEE Trans. Magn. 2016, 52, 8200304. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Unit |
|---|---|---|
| Stator Outer Radius | 64 | mm |
| Stator Inner Radius | 85 | mm |
| Rotor Outer Radius | 125 | mm |
| Shaft Outer Radius | 87 | mm |
| PM Arc Ratio | 0.85 | - |
| Stator Axial Length | 90 | mm |
| Rotor Axial Length | 92 | mm |
| Rated Speed | 800 | rpm |
| Rated Power | 3 | kW |
| Parameters | Unit | 3D Model | Semi-3D Model |
|---|---|---|---|
| Bm | T | 0.7762 | 0.7869 |
| Hm | A/m | −253,359 | −256,853 |
| Br | T | 1.1056 | 1.1209 |
| Parameters | Unit | Bolting Model | PM Model |
|---|---|---|---|
| Axial length | mm | 18 | 72 |
| Br | T | 1.1056 | 1.1208 |
| Parameter | Unit | Speed [rpm] | Rload [Ω] | Value | ||
|---|---|---|---|---|---|---|
| 2D FEM | 3D FEM | Exp. | ||||
| Eph | Vrms | 800 | 40 | 345.9 | 348.9 | 345.8 |
| Lph | mH | 10.1 | 12.2 | - | ||
| Speed [rpm] | Rload [Ω] | Value [W] | Error [%] | ||||
|---|---|---|---|---|---|---|---|
| 2D FEM | Semi-3D | 3D FEM | Experiment | Semi-3D | 3D FEM | ||
| 400 | 40 | 720.25 | 717.11 | 699.51 | 766.85 | 6.49 | 8.78 |
| 600 | 1601.5 | 1586 | 1510.8 | 1646.5 | 3.67 | 8.24 | |
| 800 | 2800.9 | 2754 | 2545.3 | 2753.1 | 0.03 | 7.55 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, J.-S.; Lee, H.-K.; Nah, J.; Kim, K.-H.; Shin, K.-H.; Choi, J.-Y. Semi-3D Analysis of a Permanent Magnet Synchronous Generator Considering Bolting and Overhang Structure. Energies 2022, 15, 4374. https://doi.org/10.3390/en15124374
Hong J-S, Lee H-K, Nah J, Kim K-H, Shin K-H, Choi J-Y. Semi-3D Analysis of a Permanent Magnet Synchronous Generator Considering Bolting and Overhang Structure. Energies. 2022; 15(12):4374. https://doi.org/10.3390/en15124374
Chicago/Turabian StyleHong, Ji-Su, Hoon-Ki Lee, Junghyo Nah, Kyong-Hwan Kim, Kyung-Hun Shin, and Jang-Young Choi. 2022. "Semi-3D Analysis of a Permanent Magnet Synchronous Generator Considering Bolting and Overhang Structure" Energies 15, no. 12: 4374. https://doi.org/10.3390/en15124374
APA StyleHong, J. -S., Lee, H. -K., Nah, J., Kim, K. -H., Shin, K. -H., & Choi, J. -Y. (2022). Semi-3D Analysis of a Permanent Magnet Synchronous Generator Considering Bolting and Overhang Structure. Energies, 15(12), 4374. https://doi.org/10.3390/en15124374