1. Introduction
Wind energy is one of the most important renewable energy sources. The worldwide wind power generation capacity has been growing at a substantial rate over the past decades. Research in wind turbine systems has indicated a crucial need to develop high-performance and cost-effective electrical machine technologies, as they are an integral part of wind turbine power-trains and play a significant role in wind energy conversion. Doubly-fed induction generator (DFIG) with a partial-scale power electronic converter (PEC) and a single or three-stage gearbox has been the most dominant wind turbine power-train technology since the early 2000s. Another common wind turbine power-train technology involves a permanent magnet (PM) synchronous generator with a full-scale PEC and a single or multi-stage gearbox [
1,
2]. Owing to gearbox issues and related system reliability concerns, there has been a paradigm shift towards the use of direct-drive (DD) generators with full-scale PECs, especially for offshore wind power applications. However, since the direct-drive generators run at a low turbine speed, they are inherently heavier and larger due to high torque handling requirements in wind turbine systems.
In the past decade, there has been much interest in magnetically geared electrical machine technologies [
3]. Amongst others, permanent magnet vernier machines (PMVM) received a lot of attention [
4,
5,
6]. The inherent magnetic gearing effect enables the PMVM to have high torque density, potential for less weight and more compactness than conventional permanent magnet synchronous machines (PMSM), while also keeping the same structural simplicity. Despite these distinct advantages, the PMVMs are notably characterized by poor power factor, which increases the PEC rating requirement. In an attempt to improve the power factor of PMVMs, some researchers proposed more complex machine topologies such as double-stator [
7] and double-rotor [
8] PMVMs, while others studied special PM arrangements like Halbach [
9] or spoke-type [
10].
Some early comparison studies between PMVMs and conventional PMSMs can be found in the literature. However, they mainly focused on electric vehicles (EV) and general low-speed industrial drive applications [
4,
11,
12,
13]. A systematic method for designing direct-drive PM vernier wind generators is presented in [
14] and validated based on a designed 5 kW prototype [
15]. The work reported in [
16,
17] is probably the first attempt at the design, practical evaluation and comparison of a surface-mounted PMVM with a benchmark conventional PMSM for wind power applications.
More recently, the quantitative analysis of the applicability and potential of PMVM technology for utility-scale wind power applications has been conducted in [
18,
19,
20,
21]. The general conclusion drawn from these studies is that systems involving PMVM designs are not yet competitive in comparison to those of conventional PMSMs with several-megawatt (MW) power levels. This is because the only benefit that seems to be guaranteed from PMVM is the significant reduction in machine volume, while the advantage of lower active mass is discounted by the fact the total machine mass in direct-drive generator systems is heavily dominated by the structural mass.
Furthermore, other benefits such as higher efficiency and lower cost obtained at the PMVM level seem to be overturned when the whole system is considered, mainly due to the increased power converter costs and losses associated with the PMVM system. Moreover, it was further revealed that when observed from the slot-pitch-ratio (SPR) point of view, the design of PMVM seems to be a trade-off between the improved performance and demagnetization risk [
18]. Interestingly, the majority of the available PMVM designs at multi-MW output level are limited to only a pole-ratio (
) of five (5), including the studies in [
18,
19]. Hence, this paper will extend the current knowledge gap by further looking into other pole-ratios greater and/or less than five. This will provide a wider picture of what could lead to the optimal design at this power level.
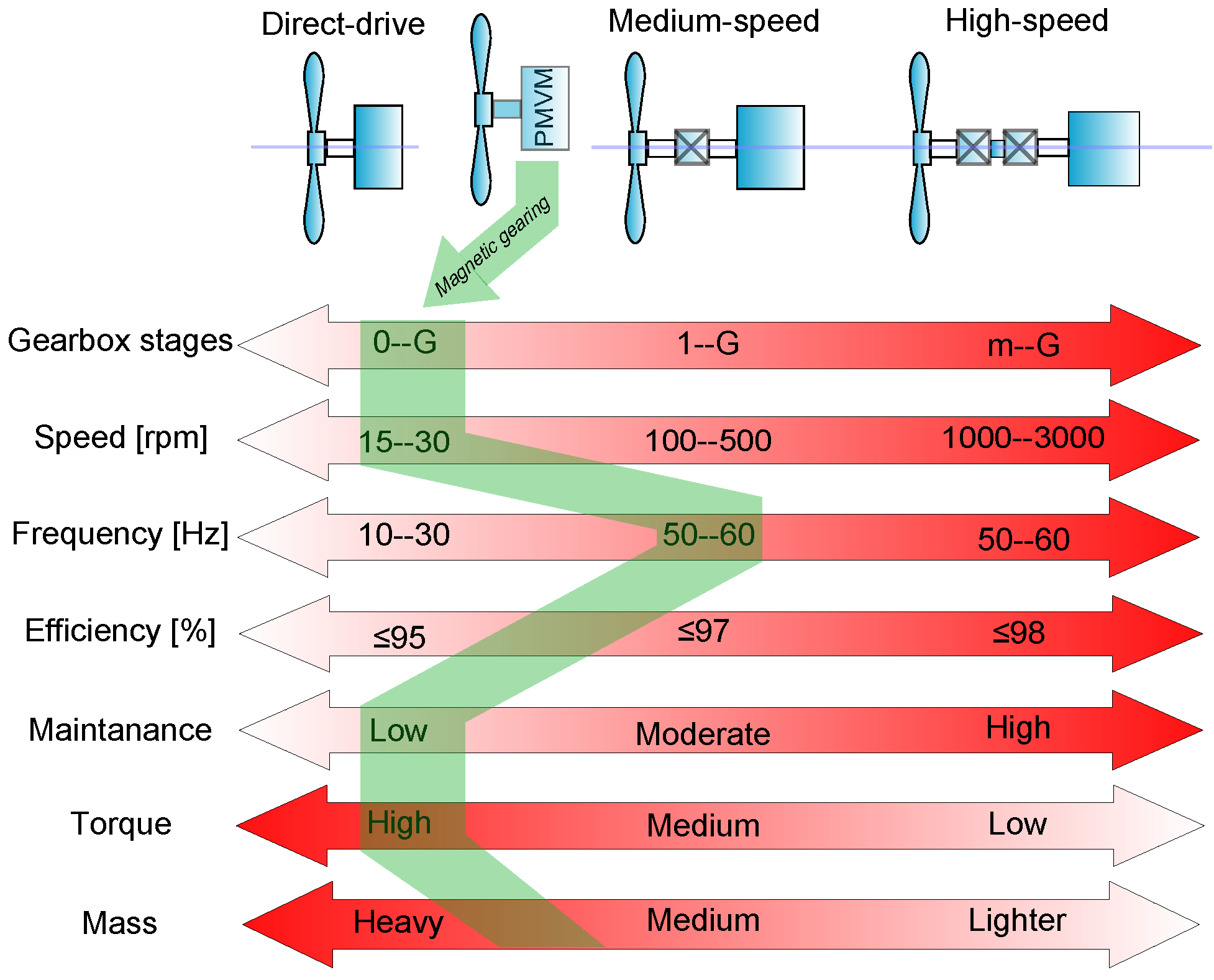
An interesting aspect of the PMVM technology is that a standard PMVM (
with a single-stator and a single-rotor) has the same mechanical simplicity and gear-less layout as that of a conventional DD-PMSM, which suggests that the PMVM is simply another DD-PMSM. On the other hand, a PMVM usually operates at a slightly higher frequency due to its inherent magnetic gearing features, which are closer to that of the medium-speed (MS) geared PMSMs. A more intuitive view can be gained by putting the PMVM technology alongside current mainstream wind generator technologies, as shown in
Figure 1, which clearly shows that the PMVM technology shares some advantages and unique characteristic properties with both the direct-drive (
high torque capability and low maintenance) and medium-speed (
lower mass) PMSMs.
This paper is the extended version of [
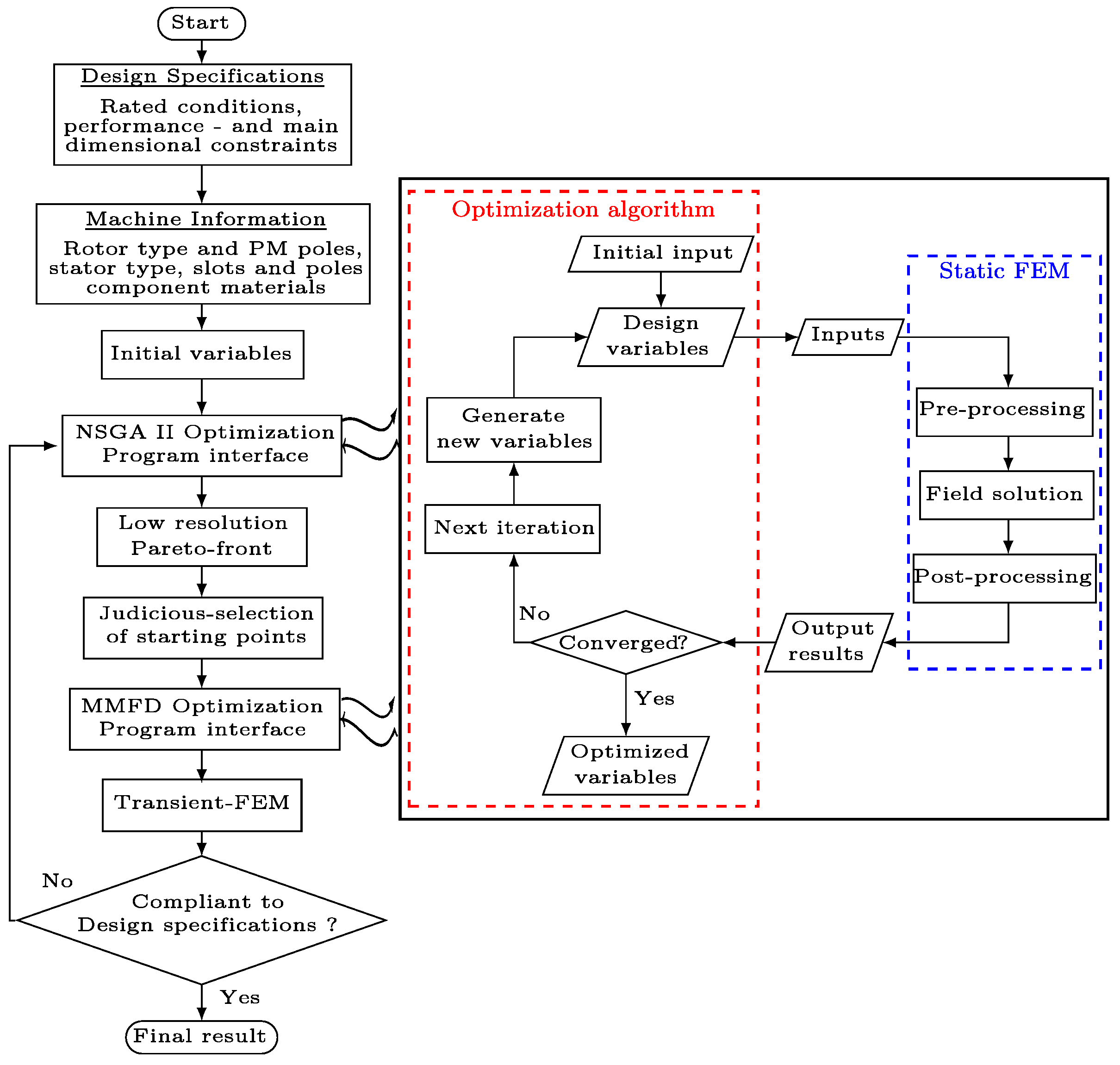
20], which aims at studying the feasibility of implementing the PMVM technology for high-power wind generator systems. To achieve this goal, a detailed design optimization study using the finite element method (FEM) is conducted for a number of selected PMVM topologies/design choices at utility power levels. The realized PMVM designs are then evaluated against a conventional PMSM of corresponding power rating. With the ever-increasing power capacity and size of turbines in the wind energy industry, it becomes more challenging to mount a nacelle on the top of a tower. A lighter and lower-cost wind generator is always preferred in the wind power industry. Thus, the main design objective in this study is to minimize the total mass and cost of active electromagnetic material of a PMVM, while subjecting it to the overall dimensional constraints and design specifications.
In this updated paper, for the sake of completeness, the fundamental working principle of the PMVM is given in
Section 2, the basic winding configurations of PMVMs are described in
Section 3, and this will be followed by a brief description of the field-circuit model of PMVMs in
Section 4 and the explanation of the implemented optimization strategy and specifications in
Section 5. Then, the obtained results are presented and discussed in
Section 6. In comparison with [
20], the validation of the formulated PMVM design optimization approach is also included in
Section 7, after which relevant conclusions are drawn in
Section 8.
2. Fundamental Working Principle
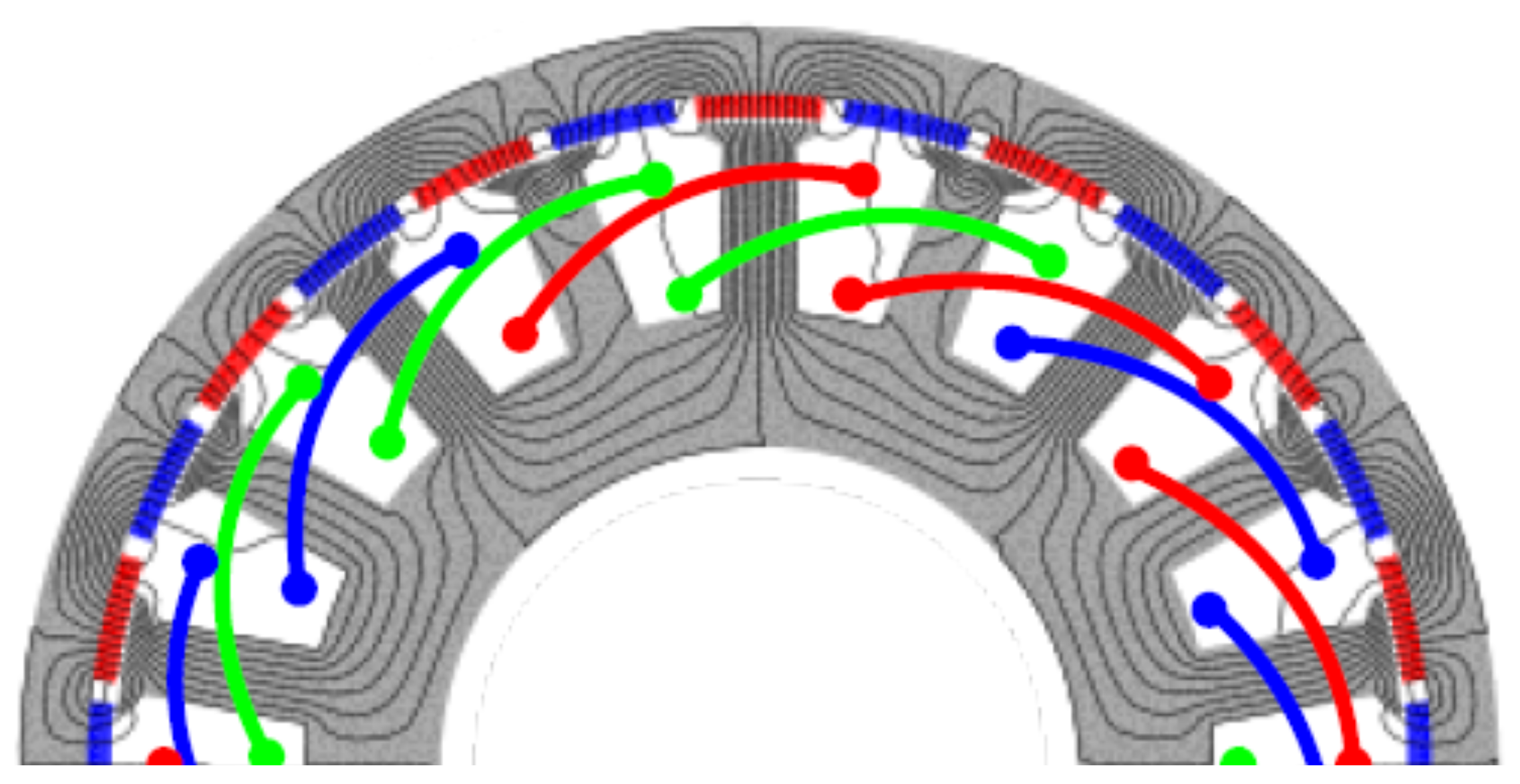
The basic operation of PM Vernier machines relies on the
Magnetic Gearing principle [
22,
23]. In this concept, a high-speed low-order space harmonic field is generated by the stator windings, whereas the low-speed high-order space harmonic field originates from the rotor PMs. The two field harmonics are magnetically coupled through modulation by the ferromagnetic pole-pieces (
flux modulator), which are normally situated in-between their respective exciting components. Flux modulator can be in the form of a separate component or a split stator tooth or even the stator teeth themselves. For the magnetic gearing principle to be effectively realized in PMVMs, the number of winding pole-pairs (
), rotor pole-pairs (
) and flux-modulator pole-pieces (
) is strictly related by [
22,
24]:
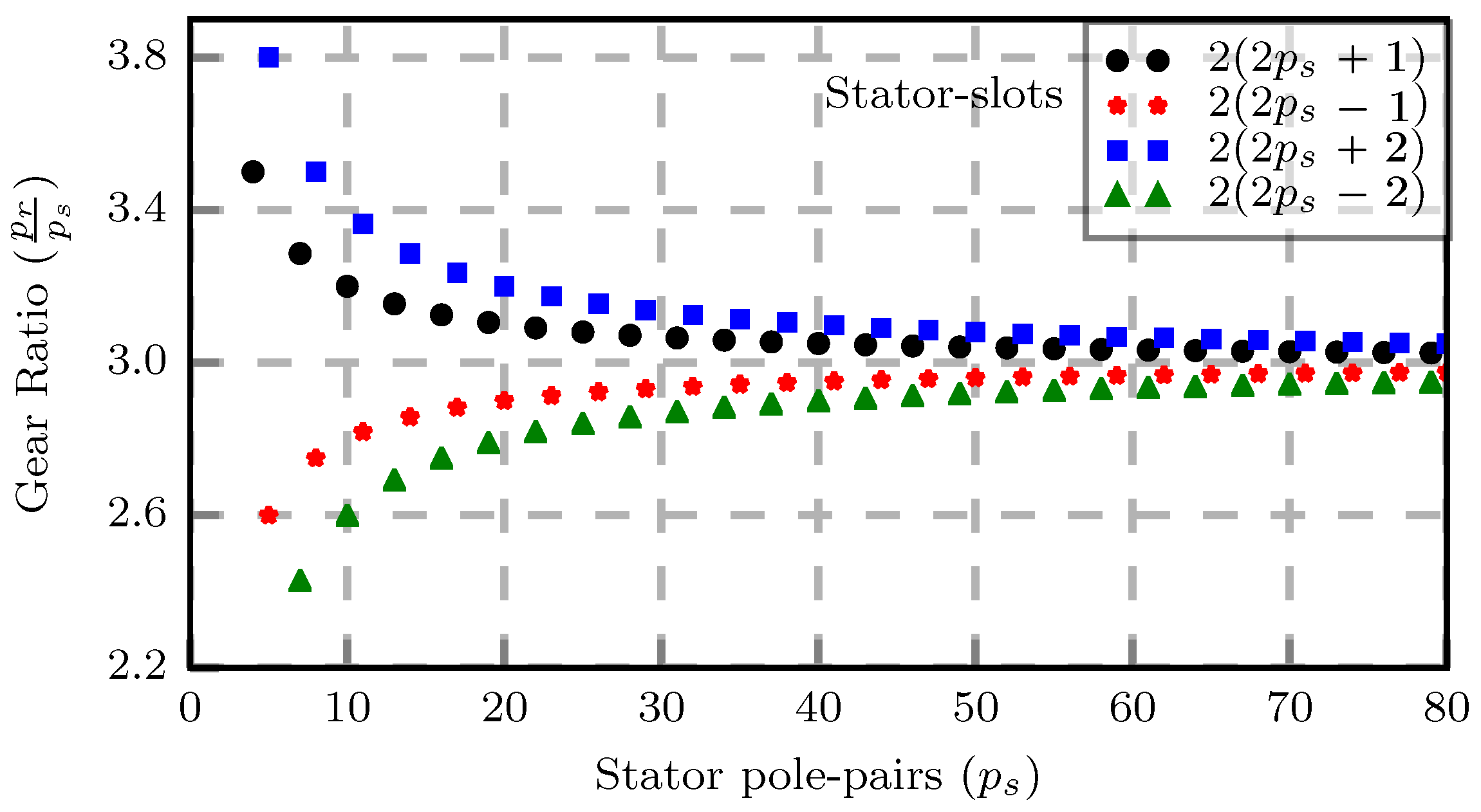
In addition, it has been proven that a pole/slot combination given by
enables a better performing PMVM design as opposed to the other combination with
[
25]. The number of stator teeth/slots (
) can then be separately selected according to the applicable rules to achieve stable field generation with balanced phase flux linkages at the chosen frequency. However, in the case of the PMVM type where the stator teeth also perform the modulation function, it means the stator-slots number is the same as that of the modulating pieces; hence,
can be replaced by
in (
1).
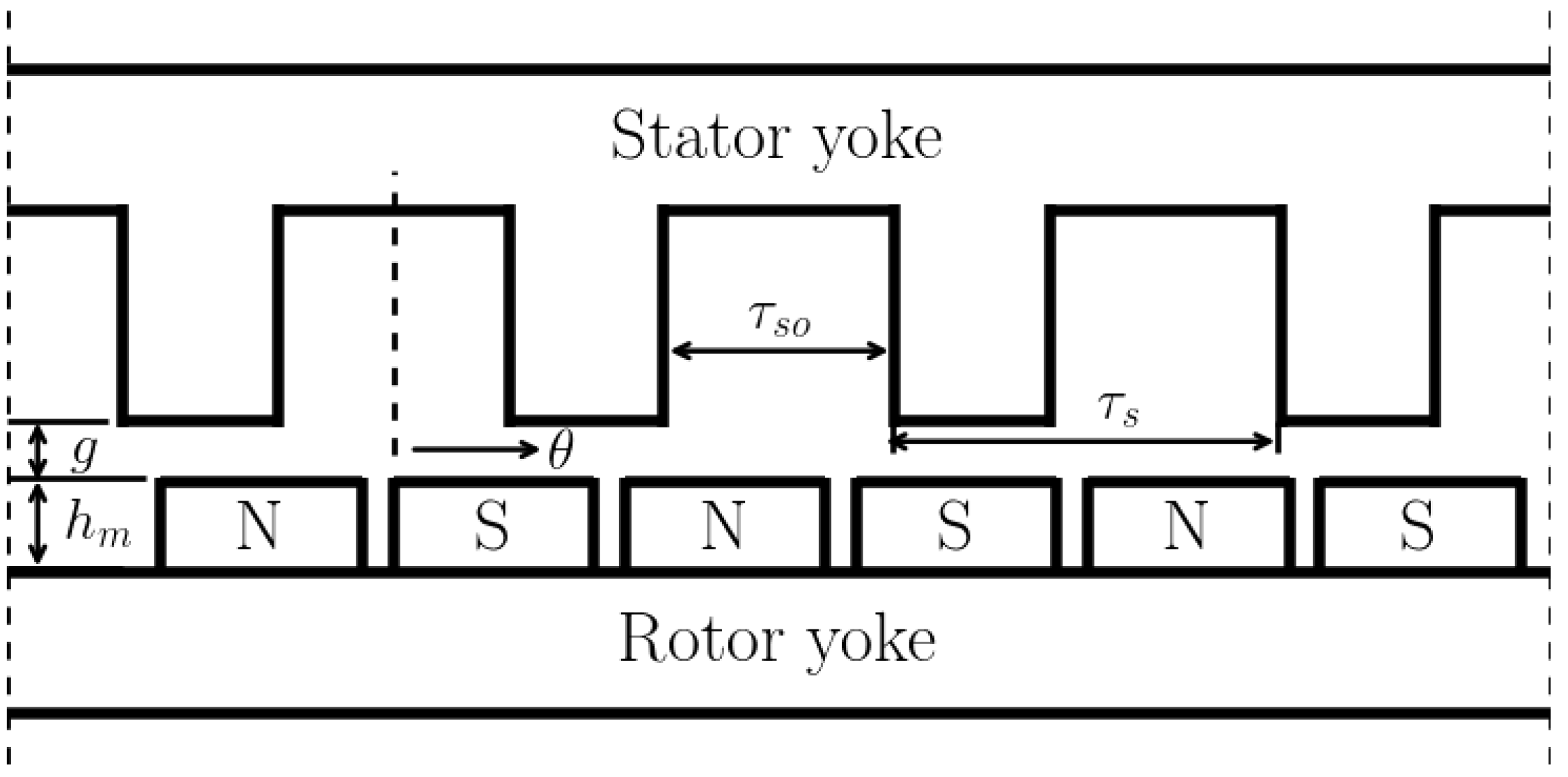
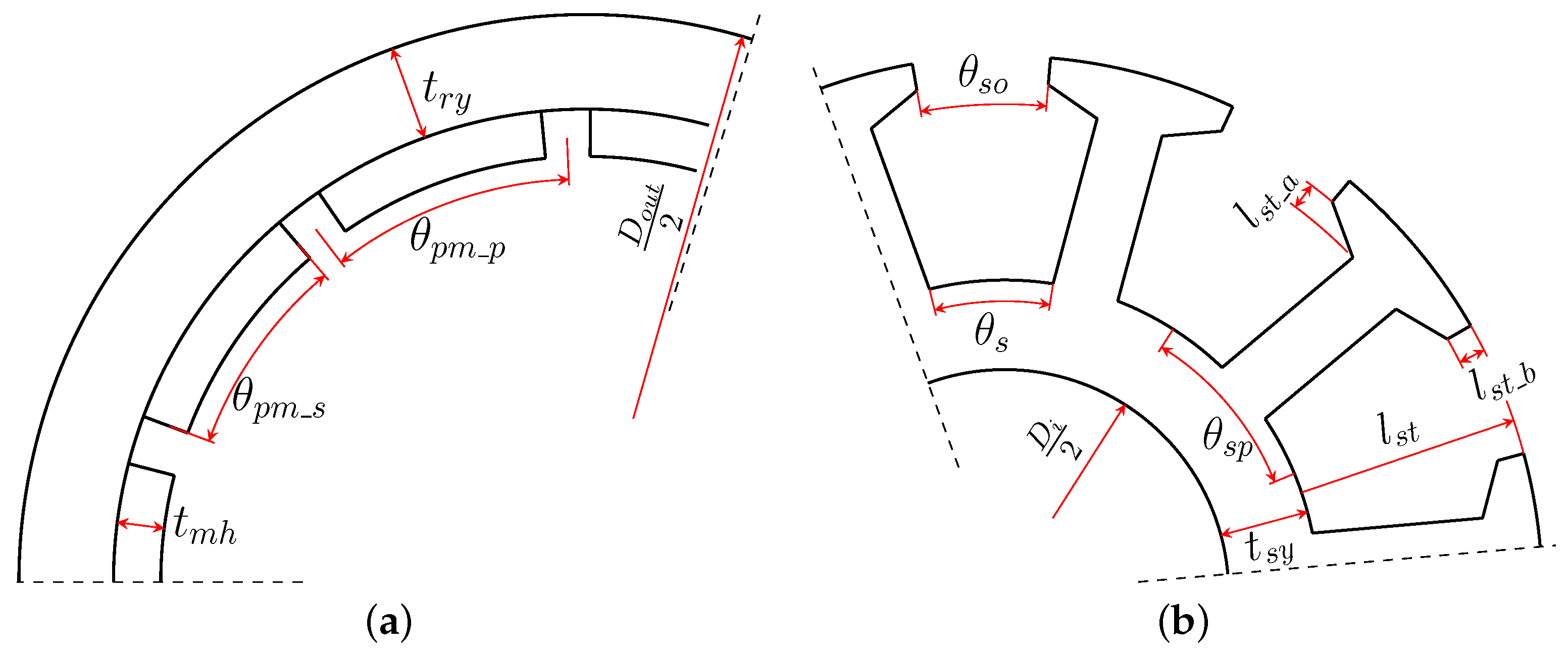
With regards to the surface-mounted PMVM, a linearized and simplified geometrical structure of which is presented in
Figure 2, the modulated air-gap flux density can be approximated as:
where
is the PMs magneto-motive force (MMF) distribution, the term
reflects the
nth order PM pitch factor, and
is the air-gap permeance function, with its average and higher-order harmonic components represented as [
22,
26]:
where
and
are the average and the specific magnitude of the
vth harmonic permeance coefficients obtained from a conformal mapping method, the parameters,
and
are respectively the slot pitch and slot opening, as illustrated in
Figure 2. Furthermore, the coefficient
is determined by the relation [
23,
26]:
where
in Equations (
3) and (
4) is the equivalent magnetic air-gap length. Both the average (
) and
vth (
) harmonic magnitudes depend on the value of
, which in turn is a function of the slot-opening to air-gap ratio (
). That is, Equation (
2) shows that in addition to the fundamental field harmonic (
), the no-load air-gap flux density is composed of the two other harmonic components generated as a result of the modulation effect, namely: (
) and (
). Therefore, when the stator winding pole-pair number is selected as
, the no-load induced voltage of the machine is:
Continuing on the similar analogy to that of the back-EMF, and with the assumption that the machine is running at a steady-state speed with pure sinusoidal currents, the air-gap electromagnetic torque for a three-phase PMVM is then formulated as shown below:
where
is the linear current density in
.
The presence of three constituent terms is now evident in both the developed open circuit voltage and torque expressions. The first term is equivalent to the component found in classical PMSMs, while the second and the third terms are due to the vernier effect. A further inspection of Equation (
5) reveals that
K and
K are the two terms playing key roles in PMVM’s operation, and they can greatly be affected by the variables
,
,
and the slot opening ratio (
), as also evident from (
3) and (
4). The characteristics of
K and
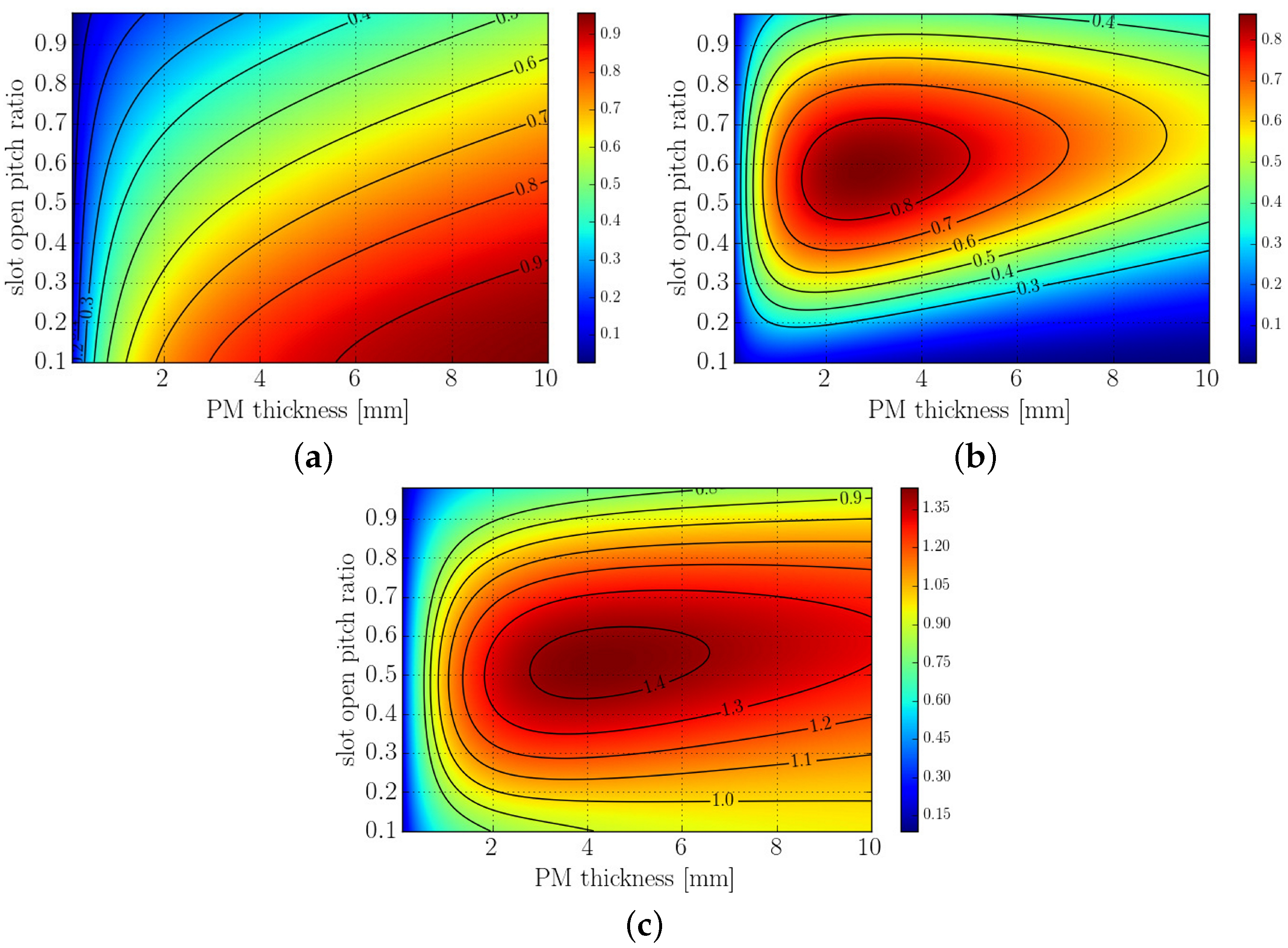
K with various values of PM thickness and slot opening ratio are, respectively, provided in
Figure 3 for a small PMV machine with 10 rotor PM pole-pairs and 12 stator slots. In
Figure 3a, it can be seen that
decreases with an increase in slot opening ratio
, whereas it increases with PM thickness for each specific
. As shown in
Figure 3b,
displays a somewhat different tendency, i.e.,
rapidly increases with an increment of PM thickness and reaches its peak point at a specific
value, after which it keeps on becoming smaller with larger PM thickness. Moreover, the similar increasing and decreasing tendencies of
are also observed with respect to increasing the slot opening ratio.
Consequently, the sum of
and
gives the
term, which reflects the combination characteristics of its constituent terms, as shown in
Figure 3c. It can be clearly seen that
also reaches its maximum value at a specific
but saturates at a slightly lower value with further increasing
. This can be expected as thicker PMs lead to a larger effective air-gap rendering a weakened modulation effect of the air-gap flux density. This implies that the optimal PM thickness of PMVMs tends to be smaller than that of conventional PMSMs for the same output performance. Thus, the PMVM has the potential for a comparatively lower PM material usage.
4. Steady-State Field-Circuit Model of PMVM
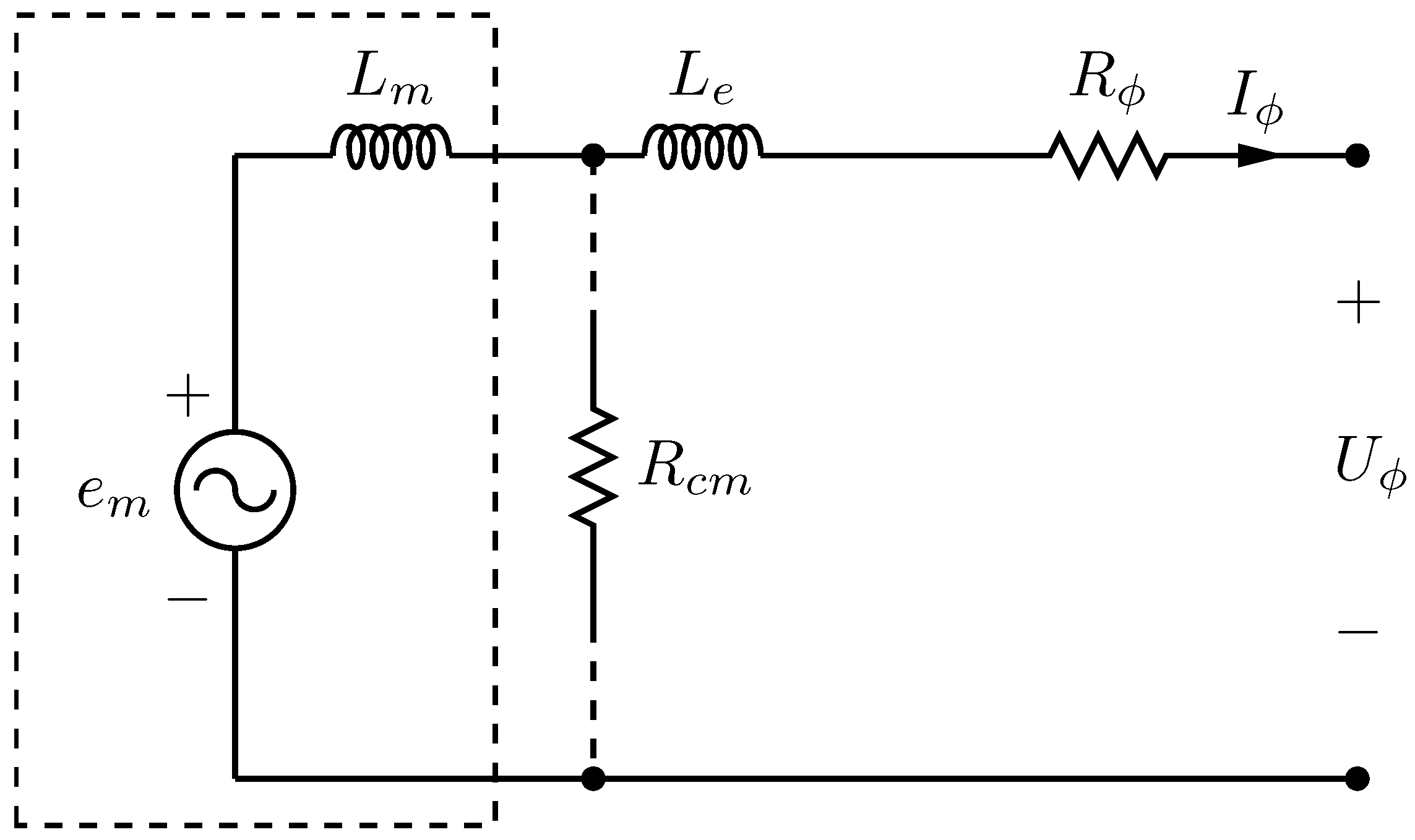
The design analysis and performance evaluation of the PMVMs in their steady-state mode of operation is realized by employing a coupled field-circuit model. Thus, the output performance is calculated through the equations derived from the fundamental per-phase equivalent circuit shown in
Figure 7. As displayed on this generator mode circuit,
is the induced electromotive force (EMF),
,
and
are the phase resistance, phase voltage and phase current, respectively. In order to account for the core and magnet eddy-current losses, a shunt resistance
is also included. Since the electromagnetic analysis is performed in 2D-FEM, the synchronous inductance is split into
and
, which represents the main and end-winding inductances, respectively. All the equivalent circuit parameters enclosed by the dashed lines in
Figure 7 are readily obtained from the 2D FE model. Other remaining parameters are deduced from analytical calculations.
One of such parameters is the core-loss, which is a function of flux density magnitude, volume of magnetic conducting material within a machine and mainly the rate of change of flux density. In addition, the considered component’s material magnetic properties also play a huge role in the resultant core losses. Thus, by using the multi-step static FE analysis, the core losses are approximated by employing the Steinmetz-based Equation (
10). Since this model equation uses flux variation and magnitude deduced from several independent static solutions, it gives satisfactory accuracy, albeit much faster compared to transient FEM simulations.
where
T is the period,
is the peak-to-peak flux density,
,
and
are the lamination material loss model coefficients.
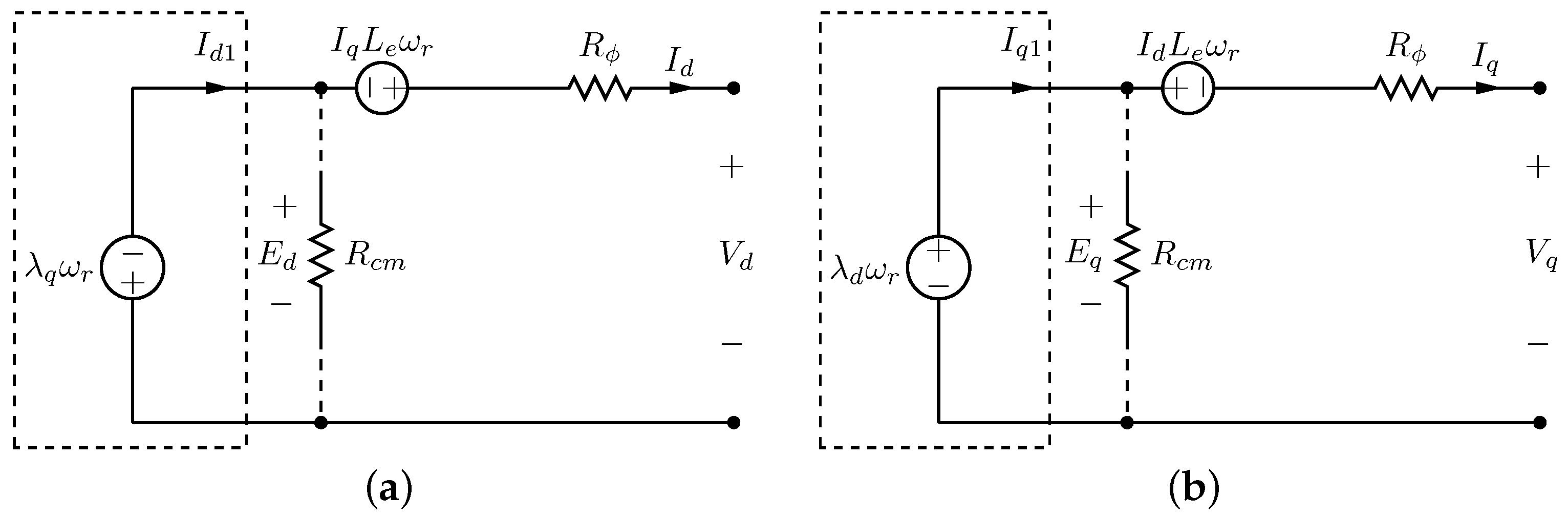
In order to simplify the machine performance computations, the instantaneous 3-phase output quantities are projected onto the
-axis reference frame through the use of the
transformation matrix. The
-axis steady-state circuits fixed to the rotor reference frame corresponding to the phase circuit in
Figure 7 are provided in
Figure 8. From these circuits, the steady-state
dq-axis voltage equations can be expressed as:
Furthermore, the
-axis current components are also deduced from the circuits in
Figure 8 as follows:
With the equivalent circuit and other associated parameters known, the air-gap electromagnetic power and developed average electromagnetic torque (for surface-mounted PM rotor) can also be computed from the general equations:
where
is the speed in revolutions per minute.
In the generator mode of operation, the difference between the air-gap electromagnetic power and mechanical power at the machine shaft is due to rotational losses and shunt core losses. On the other hand, the air-gap electromagnetic power differs from the output electric power at the machine terminals by the armature copper losses. That is, numerical addition of the developed air-gap power and the sum of rotational and shunt core losses will yield the shaft mechanical input power, while subtraction of armature losses from it gives the generator output power. The output electrical power consists of useful active power and reactive power, both of which can be approximated from the phase circuits in
Figure 8:
Subsequently, the efficiency and power factor (PF), which is a function of the phase angle difference between the output voltage and current, may also be obtained from the preceding equations. It must be noted that during the early design optimization stage, the windage and frictional losses, which constitute mechanical losses, are ignored in order to simplify the problem.
6. Optimization Results and Discussions
As a preliminary design exercise, the PMVMs are designed and optimized for a rated power of 1 MW. The considered slot/pole combinations of the PMVM are detailed in
Table 3. The pole-slots are selected based on the input speed and the expected rated frequency. As indicated in the table, the combinations are further grouped into two frequencies. The lower frequency (≈30 Hz) corresponds to that of a conventional DD-PMSM, while the other one matches that of the medium-speed PMSM with a single-stage gearbox (≈60 Hz). The basic idea behind this is to evaluate the performance of the PMVM when it is operated at the direct-drive and medium-speed PMSM frequency conditions, with similar input speed and gear ratio. This is because a PMVM looks rather similar to a conventional DD-PMSM structurally, but it incorporates a magnetic gearing principle in its operation. This inherent feature makes it look closer to the medium-speed machines from the operational frequency point of view, as illustrated in
Figure 1. Thus, it is important to assess the performance characteristics, total active mass, volume and cost of PMVMs for both operating frequencies.
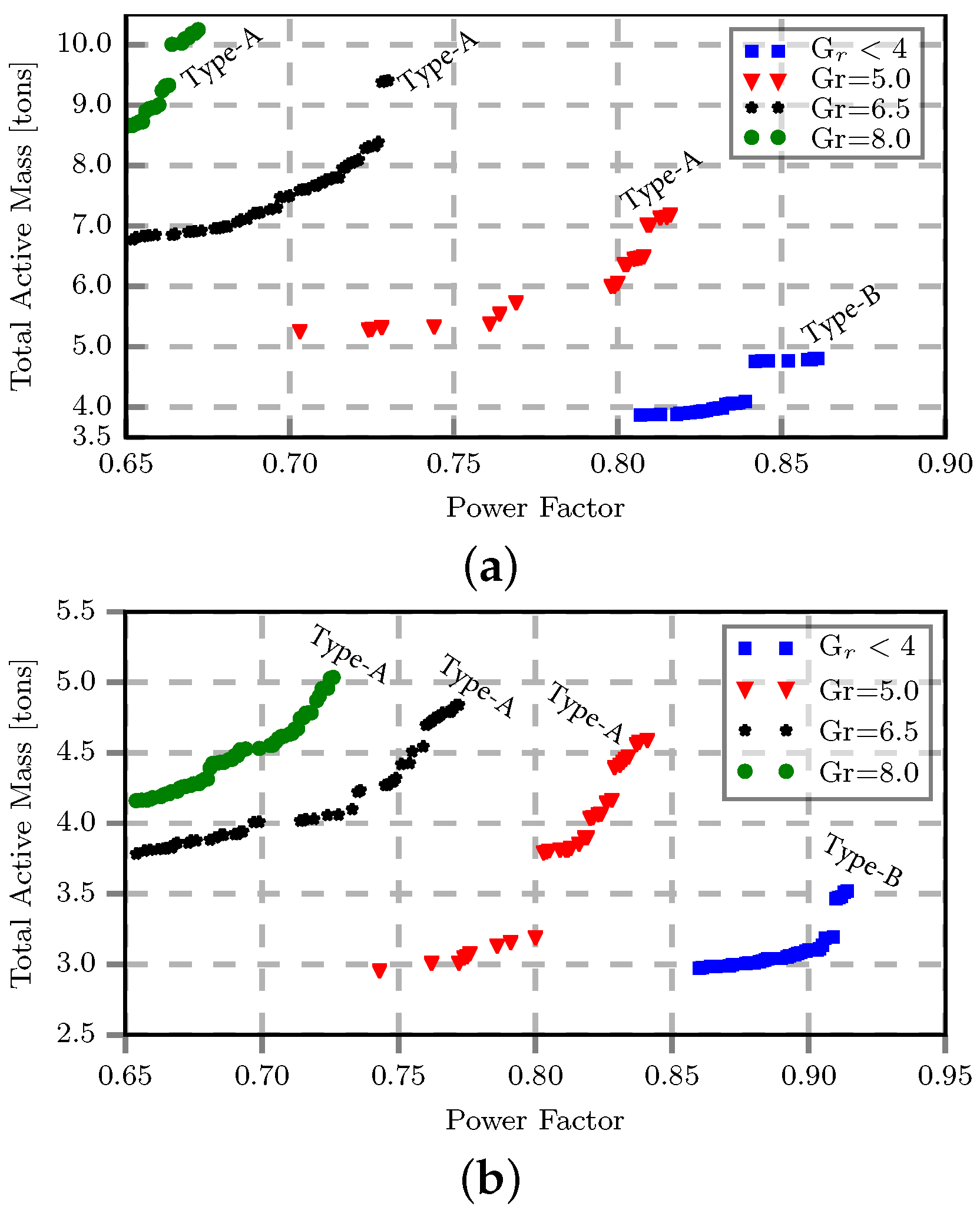
To investigate the relations between the gear ratios and the design objectives of large power PMVMs, a comparison is made of the power factor and the active weights at a number of different gear ratios. As shown in
Figure 13, in Type-A PMVMs (
), lower gear ratio designs are preferred (for both frequencies) as they tend to have higher power factor and lighter mass. Further, these Pareto fronts clearly reveal the competing relationship between the active mass and power factor in PMVMs. It is also evident that PMVMs operating at higher frequency have less total mass and better power factor.
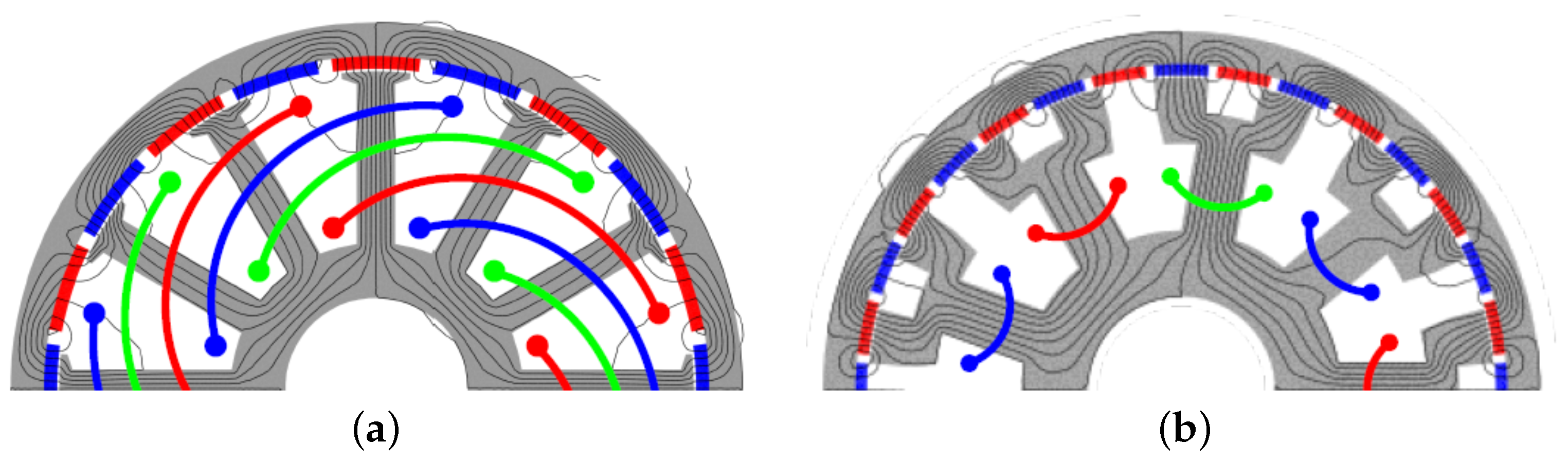
Figure 14 shows the optimum designs of PMVMs with both Type-A (
distributed overlapping winding) and Type-B (
2-slot pitch concentrated winding) configurations. The graphs illustrate the trend of active mass and power factor as a function of gear ratios at two different frequencies. It can be clearly seen that the mass increases with the gear ratio while the power factor decreases. It should be remembered that the minimum constraint on power factor was set to 0.65 during the optimization, and higher gear ratio designs appear to be testing this threshold, giving an impression that it would likely go lower than that if the constraint was relaxed. It is at this rated power level that the Type-B PMVMs (
5) appear to be more attractive in terms of power factor and lighter in weight than the Type-A PMVMs.
As a benchmark, the average DD-PMSM weight is also added in
Figure 14 for comparison. Although not shown on the graph, PMSM is known to have a near unity power factor. Thus, all the PMVM designs here have poor power factor compared with the PMSM. However, the Type-A PMVMs with
= 5 and the Type-B PMVMs are much lighter than the DD-PMSM. There is clearly a trade-off between the light weight and poor power factor in PMVMs.
It can be observed from the results of 1 MW machines that PMVM designs with operating frequency similar to that of their conventional DD-PMSM counterparts offer no benefits. Therefore, for the 3 MW design, the decision was made to go for slot/pole combinations that operate at medium-speed frequency (≈50 Hz) but with equivalent turbine input speed to the DD-PMSM. That is, in addition to the gearing ratio, the generators’ rated speed and output frequency were also the main factors considered in the selection of the slot/pole combinations, as presented in
Table 4.
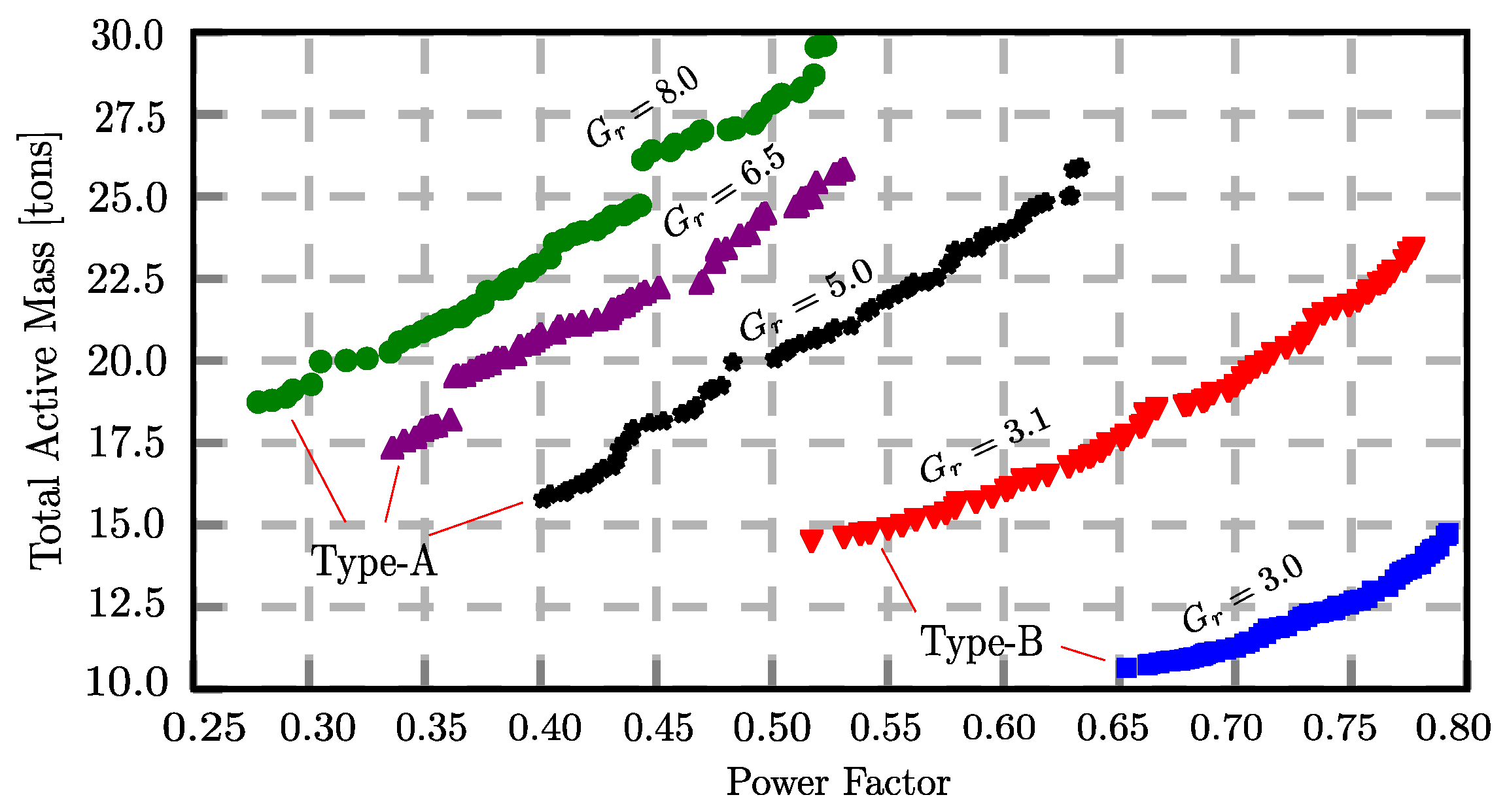
For the PMVM, the power factor is one of the performance indexes that always need special attention as it can come out to be detrimental if not properly designed. With that said,
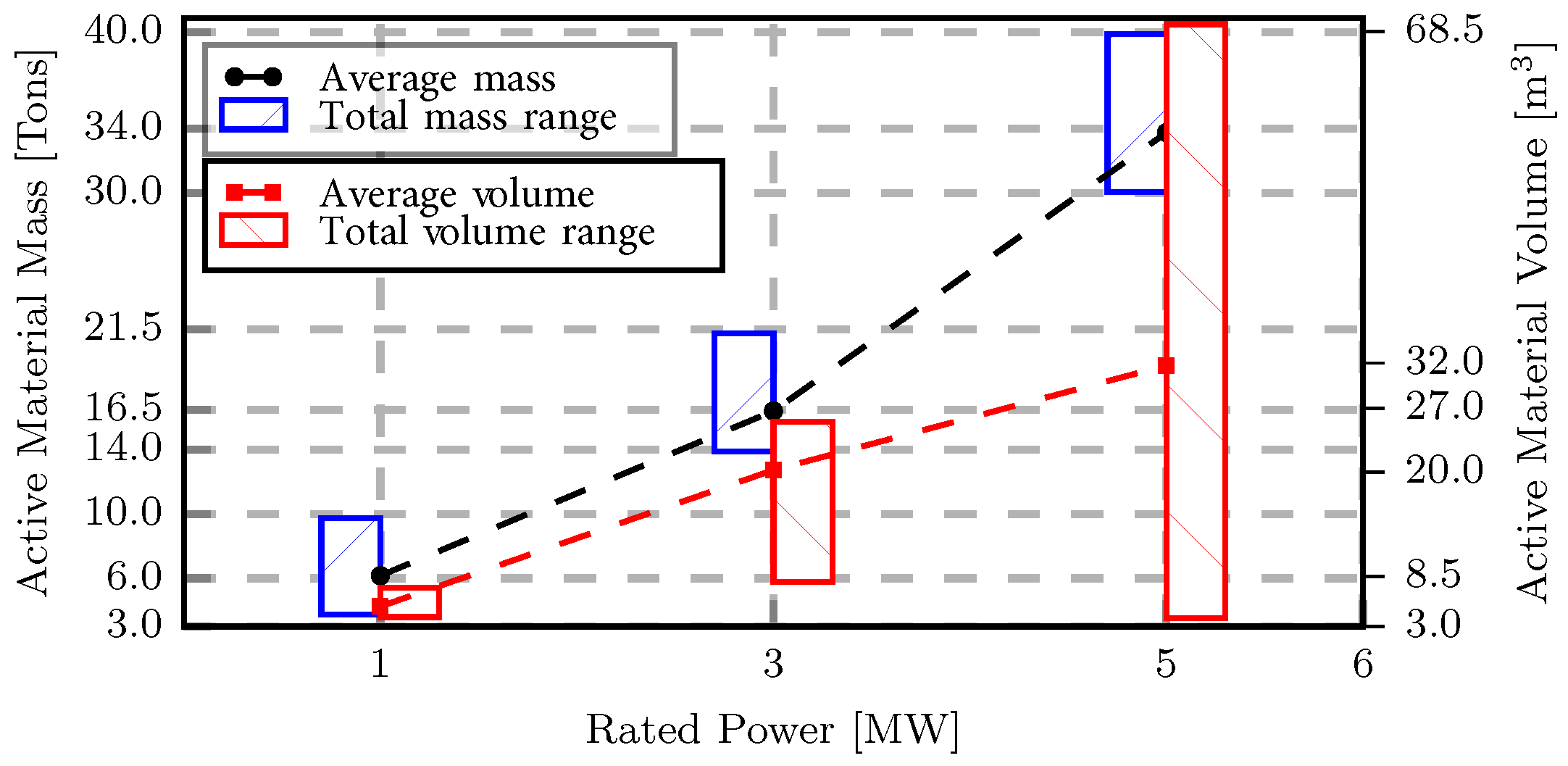
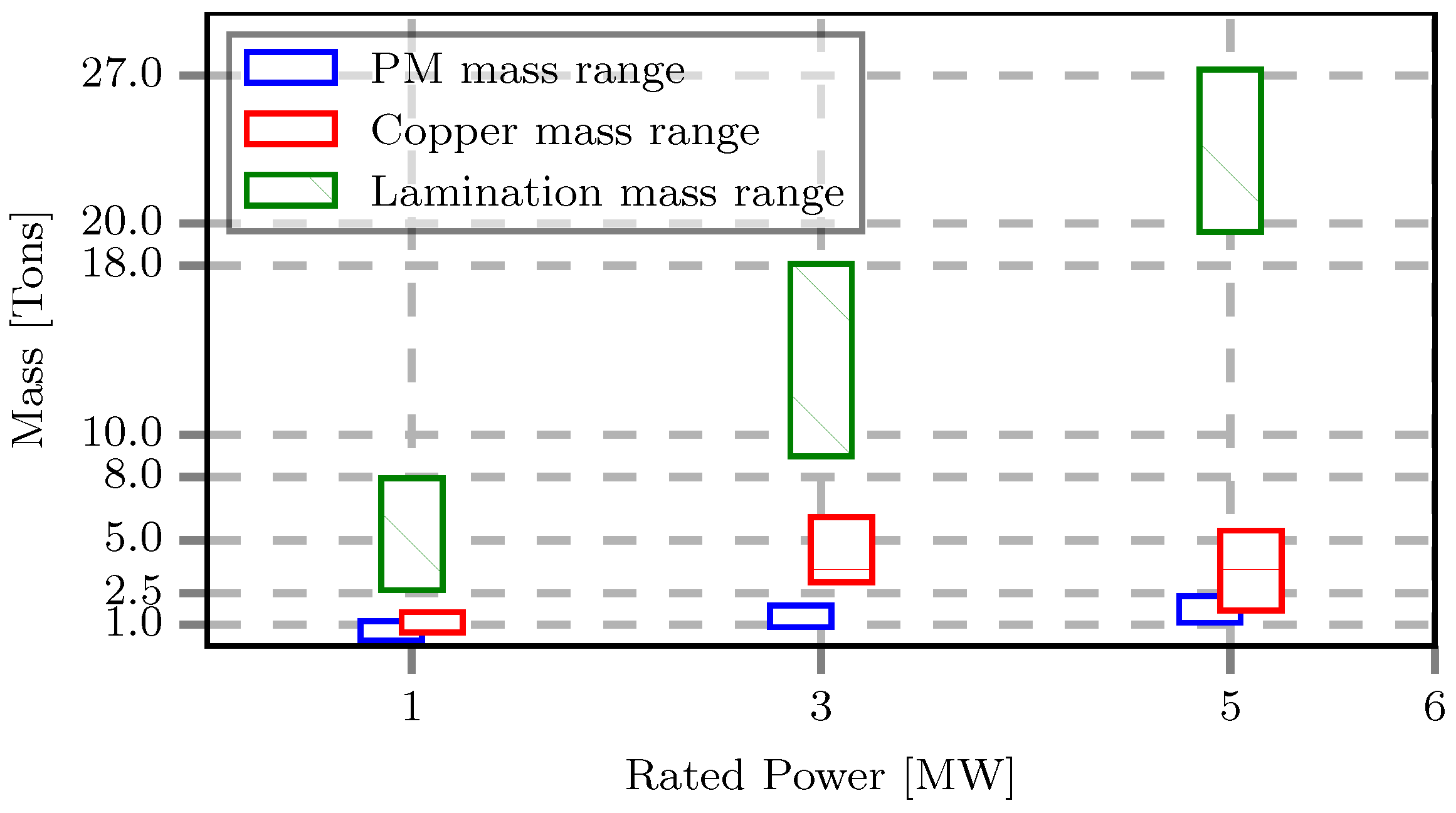
Figure 15 shows the Pareto-front between the total active mass and power factor for the five 3 MW PMVM slot/pole combinations with different gear ratios. During the optimizations, the upper limit to the PM material usage was set to be equal to the maximum PM mass requirement of the reference PMSMs indicated in
Figure 10, and the minimum efficiency was set to be 95%. Since the PMVMs have similar input speeds to those of the PMSMs, this means a fairly similar ground is created for comparison purposes in these two machine types. From the figure, the higher gear ratios invariably lead to lower power factors and heavier total masses. Furthermore, it is realized that some of the PMVM slot/pole combinations can lead to poor power factors with values less than 0.4. This further asserts the point that at output power capacities larger than 1 MW, it is always better to go for a lower gear ratio in PMVM designs.
In order to estimate the cost of the active materials in a machine, the specific cost of each material has to be known.
Table 5 gives the material prices used in this study, which may be slightly different to the market values. Based on the literature [
1] and the market trend, 35
was assumed to be the cost of the converter. It should be noted that in industry, the actual converter prices usually follow a stepped profile instead of this kind of linearized costing model.
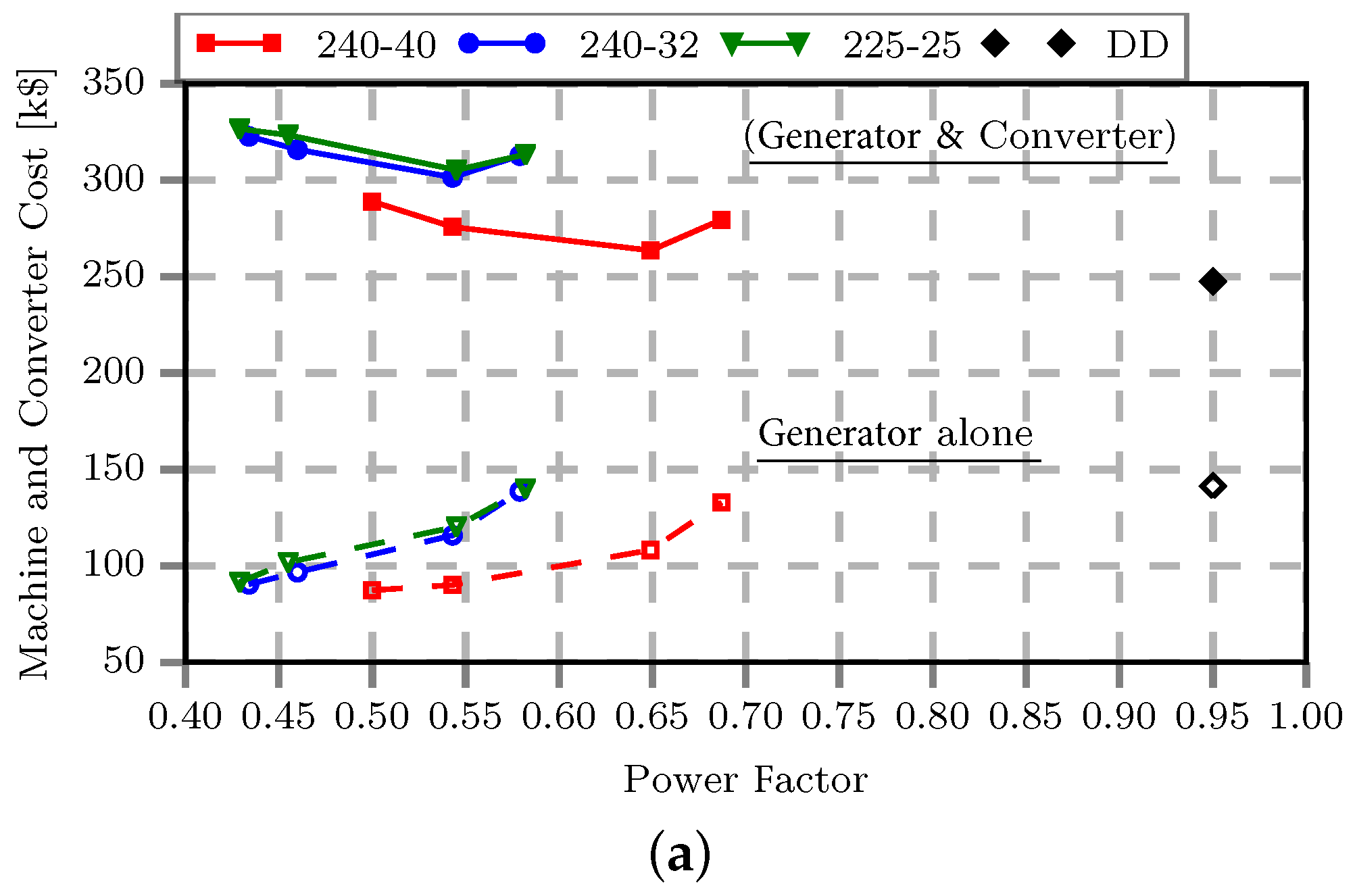
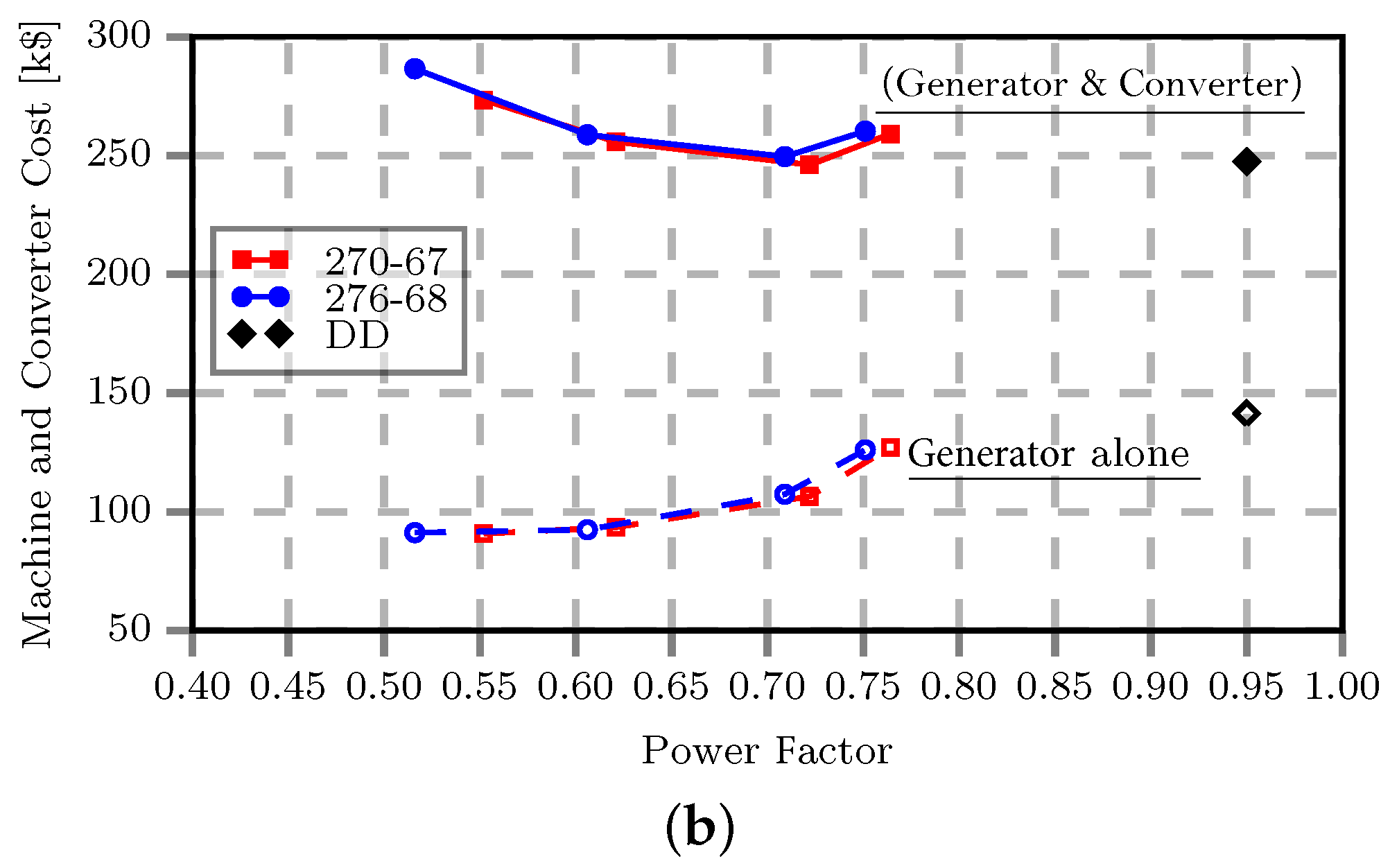
In order to compare the PMVMs with the PMSM, one design point for each slot/pole combination was taken from the Pareto-fronts given in
Figure 15 and further optimized. The objective in this case was to have a lighter and low-cost PMVM with the best possible power factor. The results are presented in
Figure 16a,b, and in
Table 6, with the indicative costs of materials also included.
Even though Silicon steel used for machine cores has a slightly lower mass density than winding copper, it has the largest impact on the total active mass because of its larger volume content. The machines’ efficiencies are always higher than the minimum constraint of 95%, even though the operating frequency is relatively high. Increasing the PM mass has relatively little effect on total active mass, but it can significantly increase the cost of the machine and slightly improve the power factor.
Figure 16a,b shows that a low-cost generator with low power factor still leads to an expensive system when the power converter costs are included. Thus, to select a good design, a best compromise has to be found between the generator cost and required converter cost.
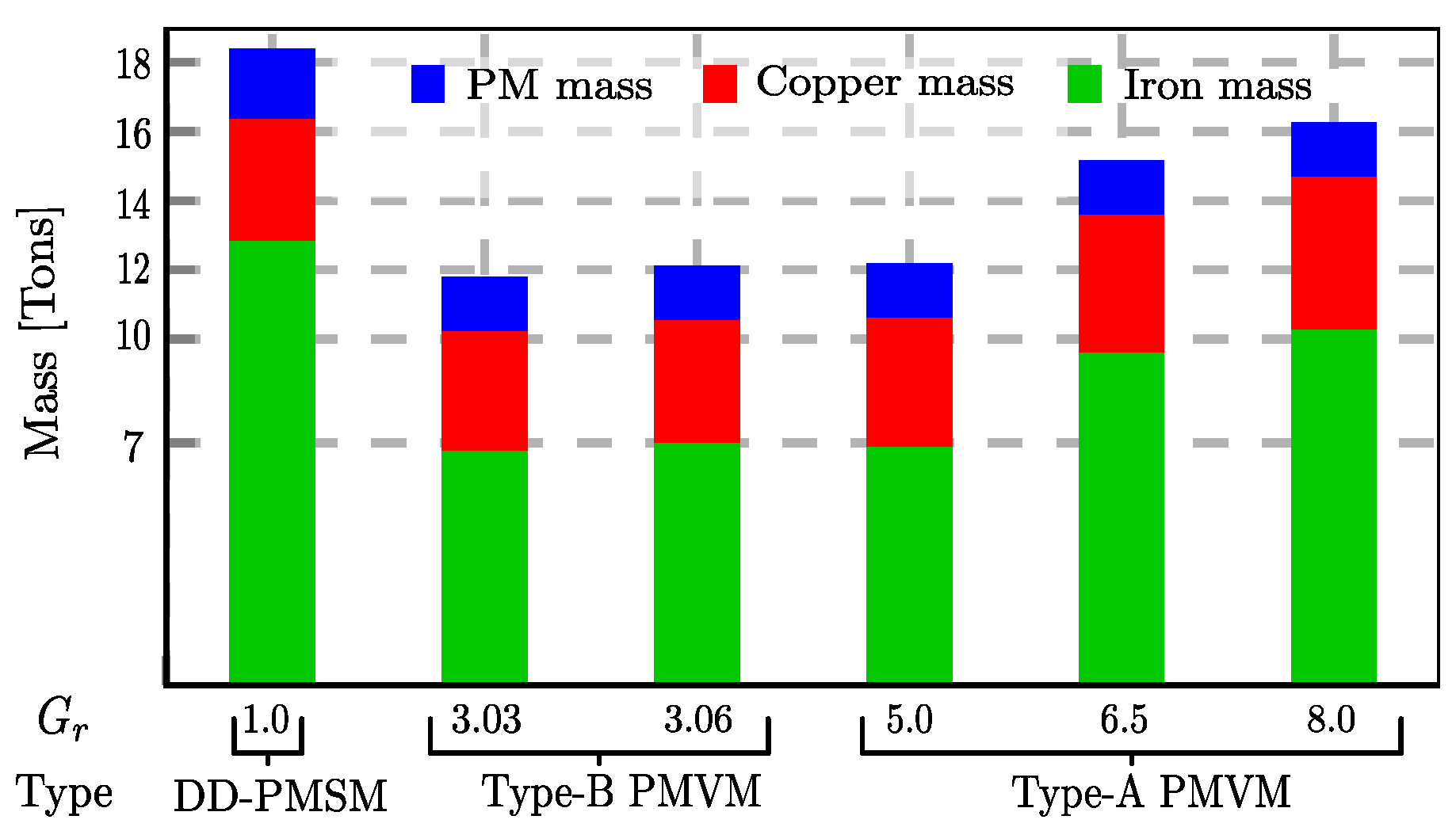
Figure 17 shows the mass distribution of the chosen designs and compares them to the benchmark PMSM. It can be seen that PMVMs with lower gear ratios have a good advantage in terms of total active weight. It shows that designing for a lighter machine with a reasonable power factor at this power rating favors pole/slot combinations with lower
G. This is a somewhat different trend to the small power PMVMs where the lowest
G values are not necessarily the best.
The results in
Table 6 reveal that the PMVM on its own can be lighter and cheaper than the PMSM. However, when the power converter costs are considered, the overall system costs of PMVMs become similar to those of DD-PMSMs because of their high converter rating requirement. It should be noted that a linear converter costing model was assumed in this study, which may not necessarily reflect the true costs in the industry. In the case that the power converter costs follow a stepped increasing pattern with regard to their MVA rating, the cost of PM vernier generator systems may become more competitive for certain power levels.
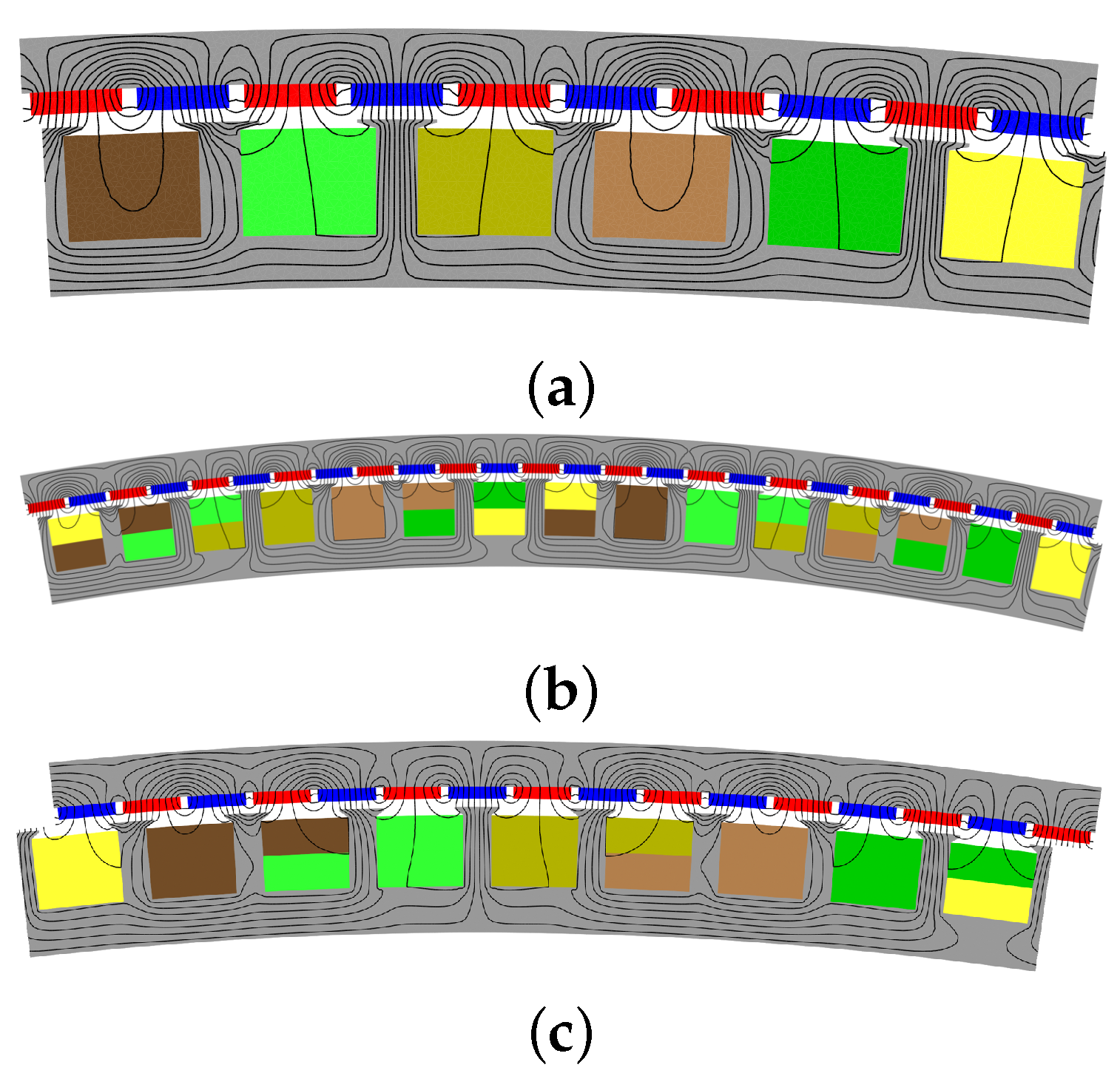
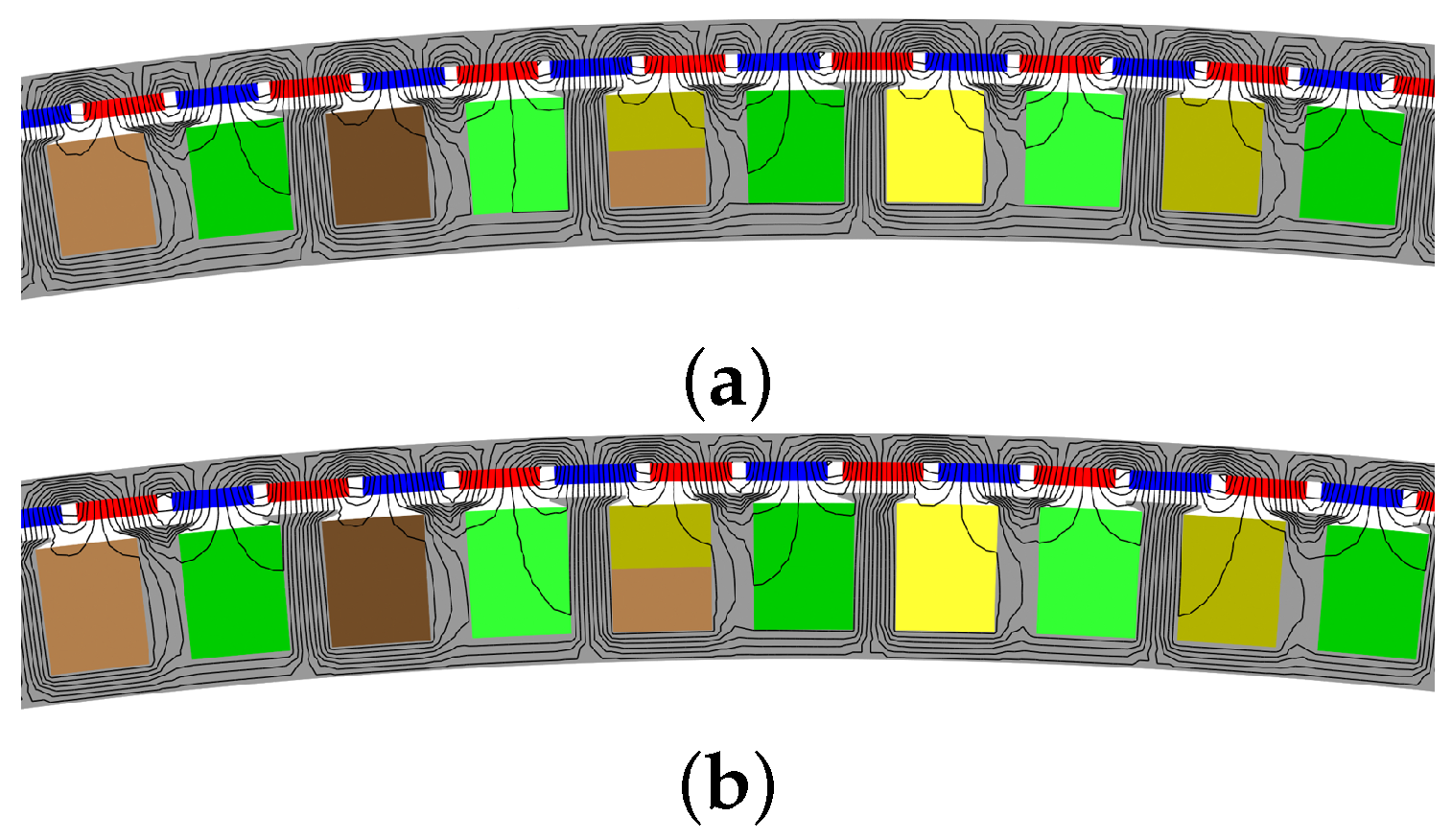
The cross-sections of these optimized PMVMs are provided in
Figure 18 and
Figure 19. It can be observed that these PMVMs have thin teeth, wide and shallow slots, which also explains why they have less active iron content than PMSMs. Furthermore, the slot-pitch to air-gap length ratios from these machines are invariably less than 16 (ranges from 11.5 to 13.8), and this means that they have less risk of irreversible demagnetization [
18].
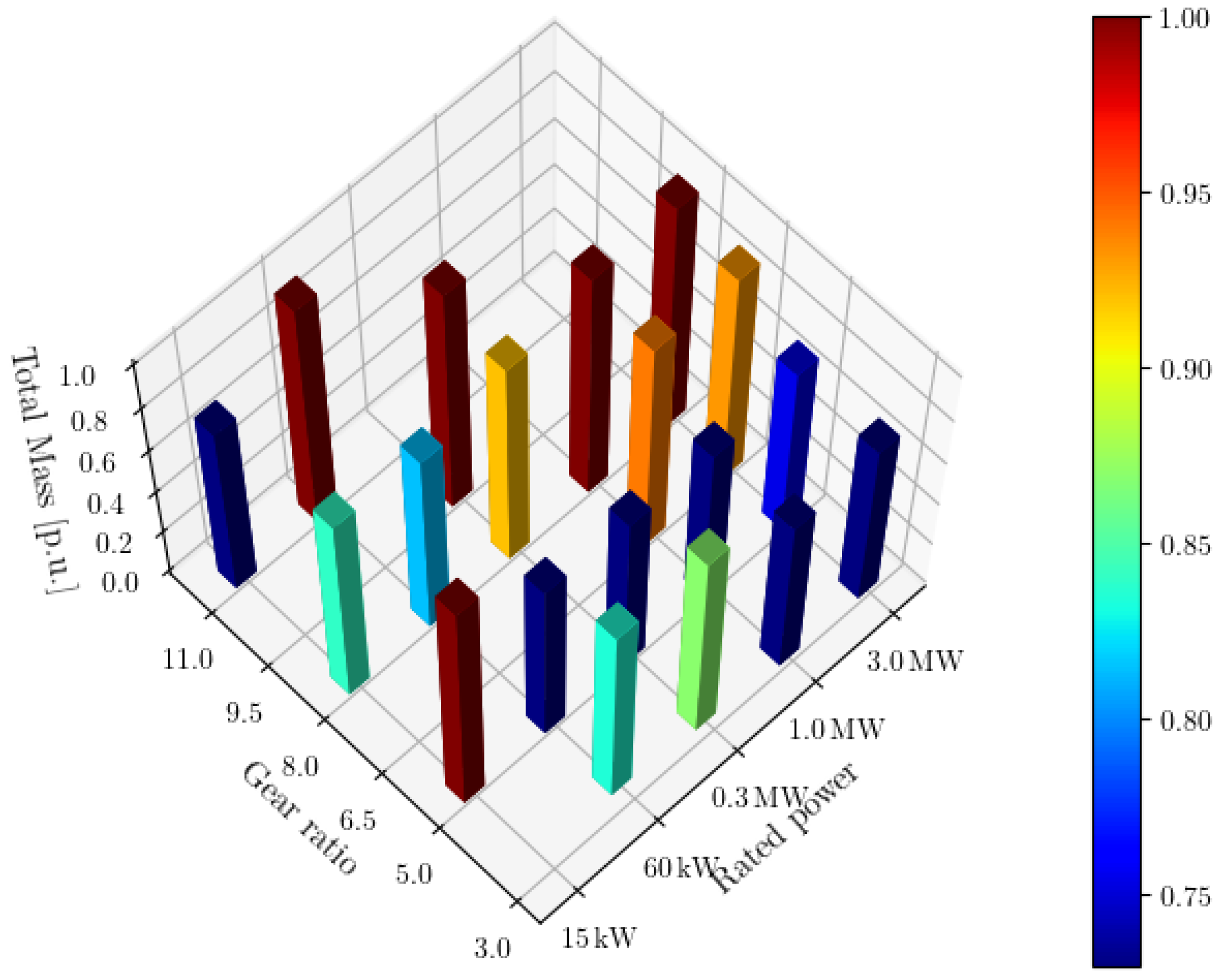
As illustrated in
Figure 20, the color-coded bar charts indicate the normalized mass scales of the investigated designs for different power ratings together with their respective gear ratios. Although the lightest designs are invariably associated with a low gear ratio of 5 for power rating up to 1 MW, the relationship between the mass and gear ratios is not very distinctive. However, at 3 MW output capacity, it becomes clear that the lowest
G has the lightest mass and the highest
G has the heaviest mass. This is in stark contrast to smaller output machines (15 kW or less), which seem to be heavier at low gear ratios.
It should be reiterated that the PMVM designs in this work are subject to a minimum power factor constraint, which is a holistic approach for comparing the PMVM power-train with that of conventional DD-PMSM’s. From a system cost (
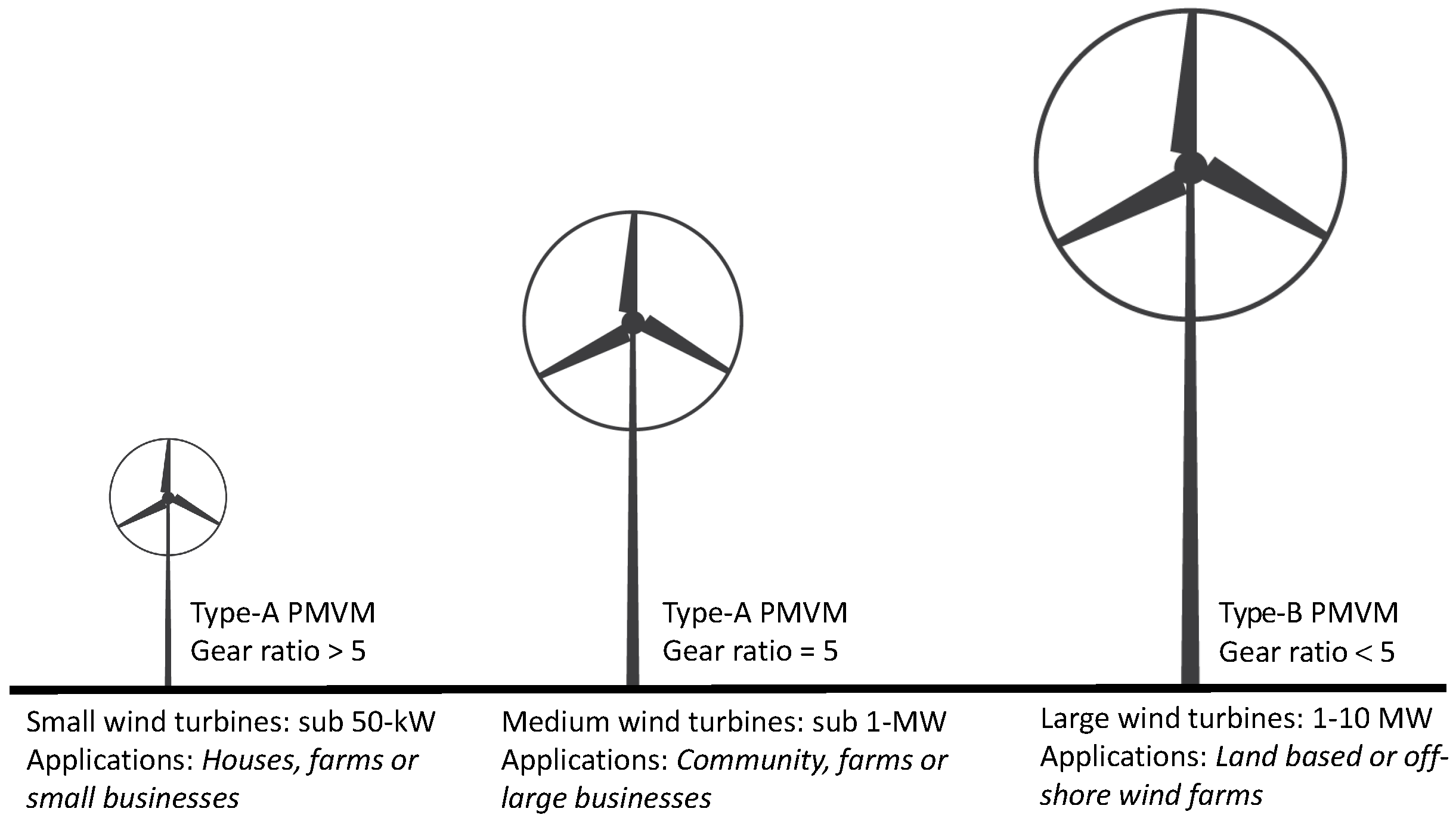
both generator and PE converter) perspective, judicious selection of gear ratios is very important for effective exploitation of the performance benefits of PMVMs. Based on the study, some specific design guidance of PMVMs for wind power applications can be given for different power levels, as shown in
Figure 21. Type-A PMVMs with high gear ratios (
) are particularly advantageous for small wind power (sub 50-kW) applications, while low gear ratio (
) Type-A and Type-B PMVMs are better suited for medium (sub 1-MW) to high (1–10 MW) power wind applications.
7. Prototype Validation
In order to practically verify the theoretical operating principle and validate the formulated FE-based optimal design approach, a 15 kW PMVM prototype was developed. The key dimensions that describe the constructed PMVM are provided in
Table 7.
Figure 22 shows the machine’s no-load flux plot, no-load and full-load flux density distributions. The stator and rotor yokes have maximum flux density magnitudes of approximately 1.5 and 1.7 T, respectively, while the over-saturated regions appear on the edges of the teeth base.
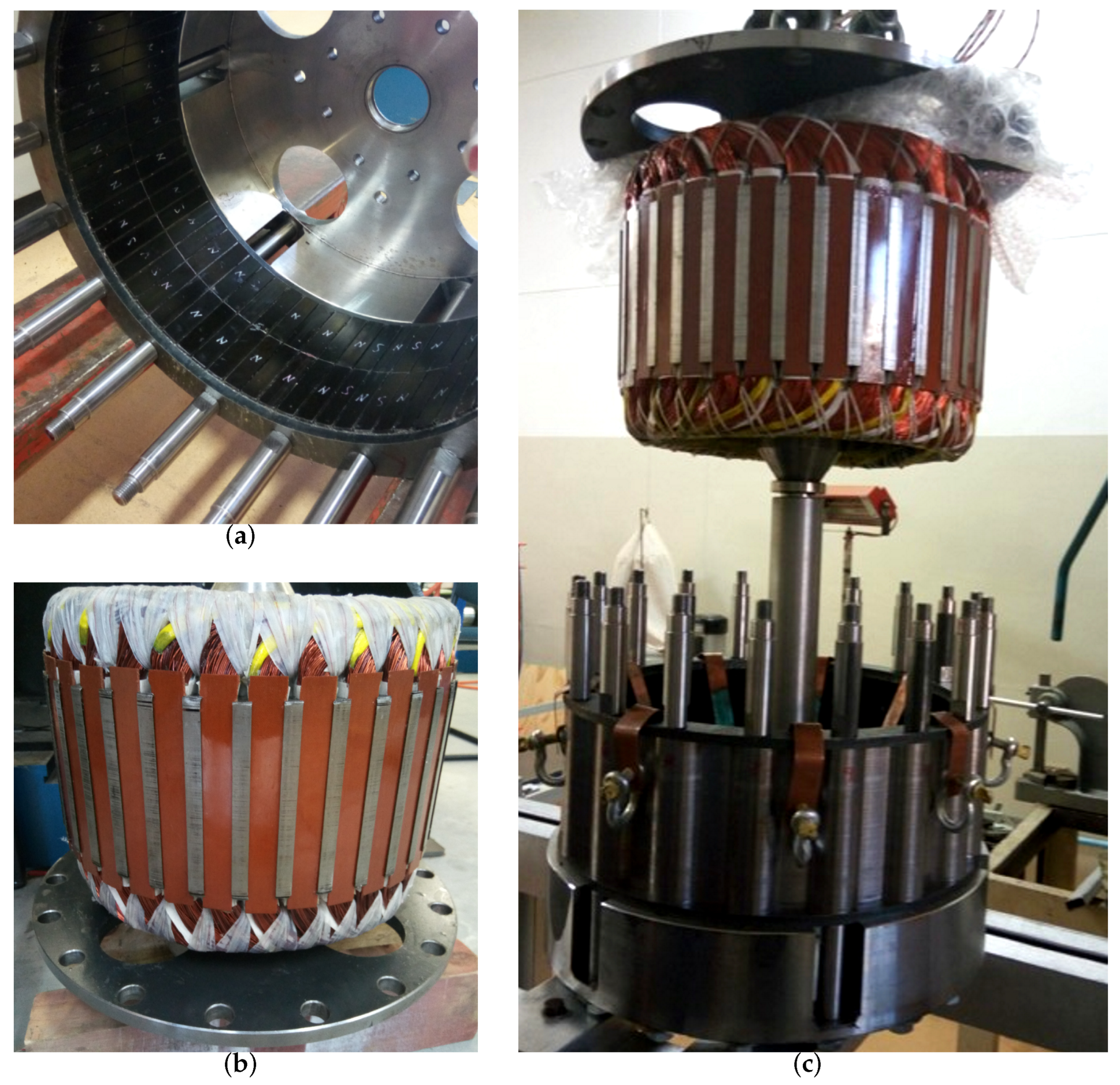
The full machine’s structural layout, rotor and stator components are shown in
Figure 23 and
Figure 24, respectively. Both the stator and rotor are made of M400-50 electrical steel laminations. The grade of NdFeB magnets used is N48H.
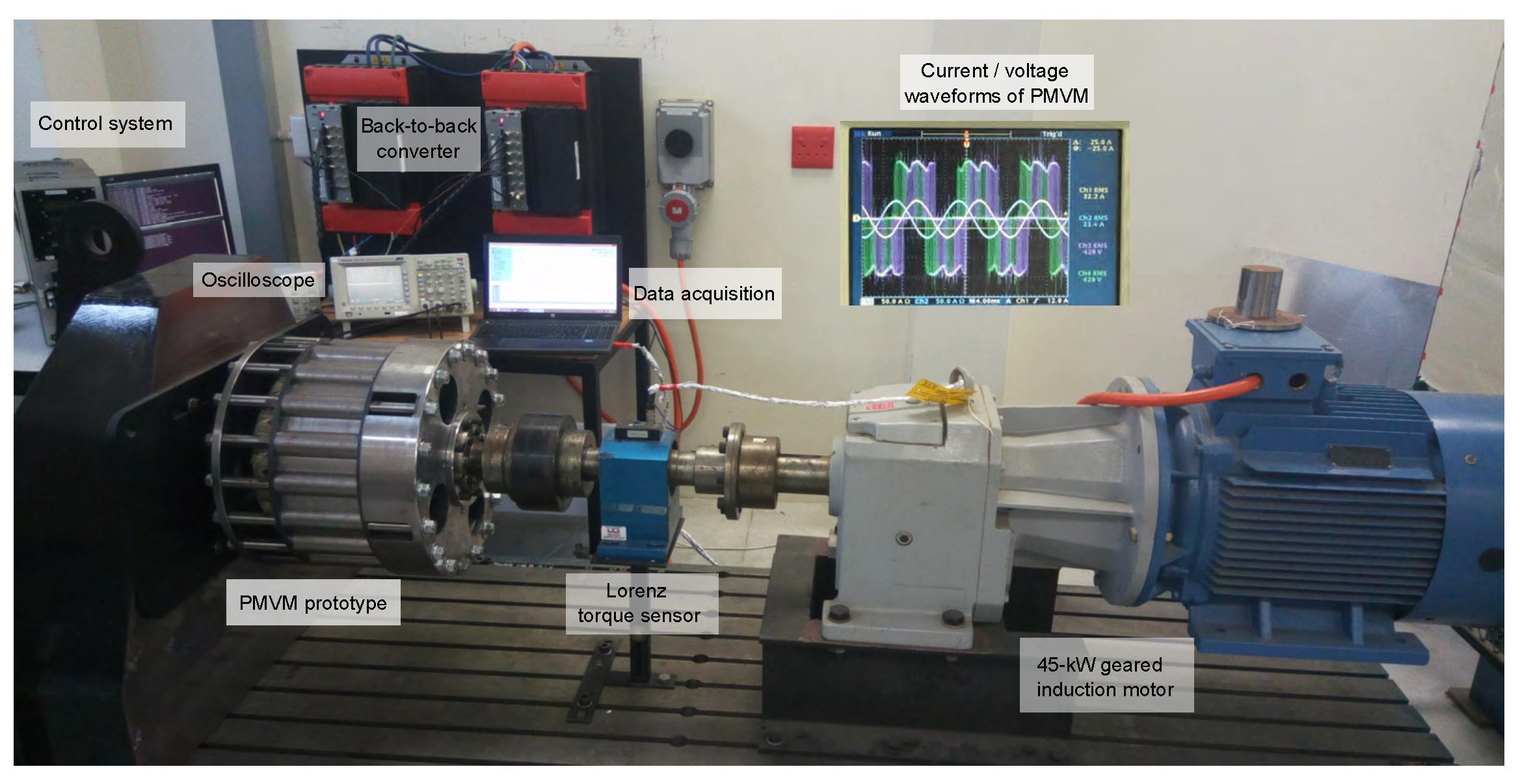
A photo of a laboratory test setup is shown in
Figure 25. A geared induction motor (prime mover) is used to drive the prototype machine such that its performance is evaluated in the generator mode. A back-to-back converter is implemented for power conditioning and circulation, while the field-oriented technique is used for the machine’s torque control.
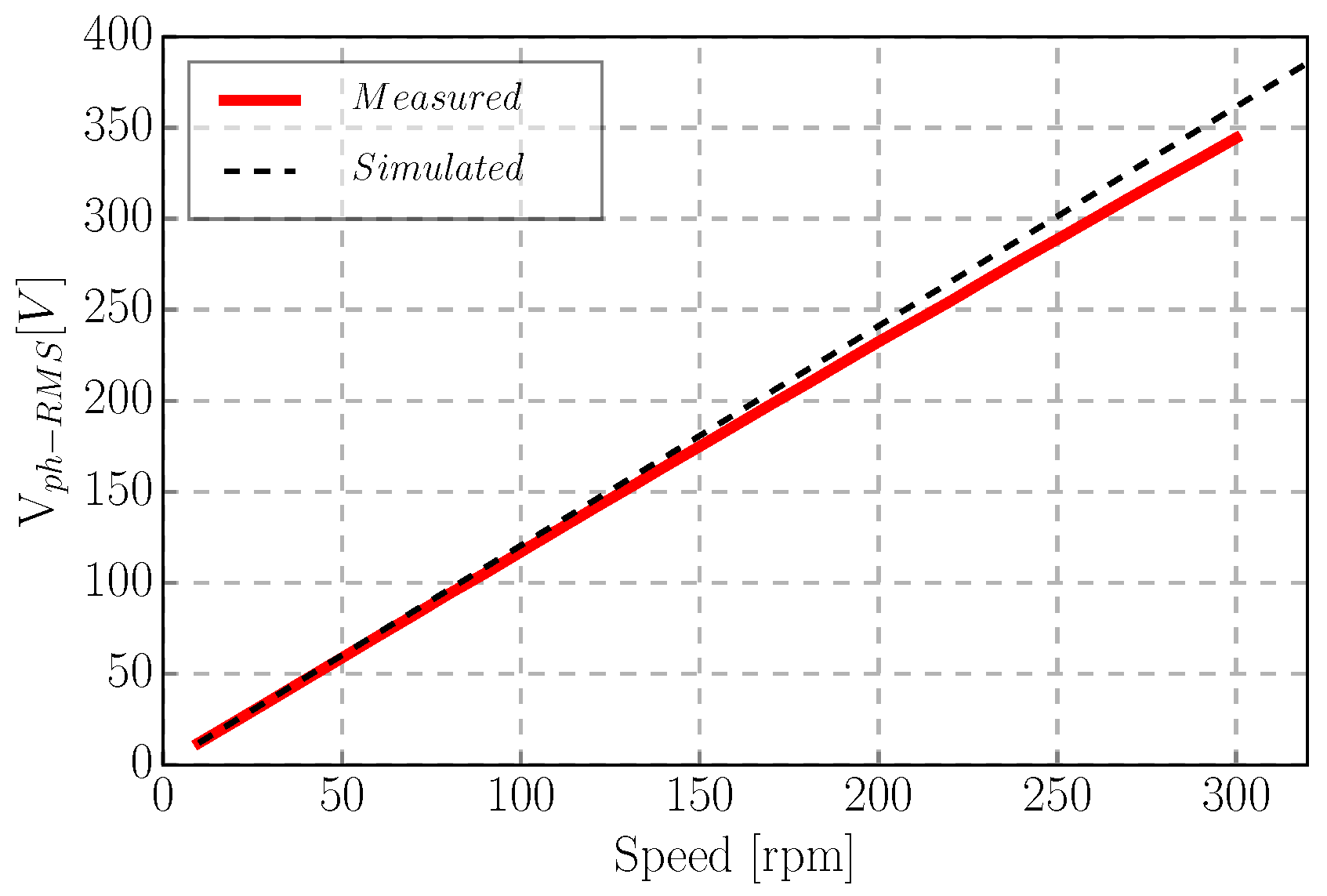
Both measured and predicted no-load RMS phase voltages of the PMVM prototype as a function of input rotor speed are depicted in
Figure 26, which shows a linear relationship of voltage to rotor speed with a good correlation between the two results.
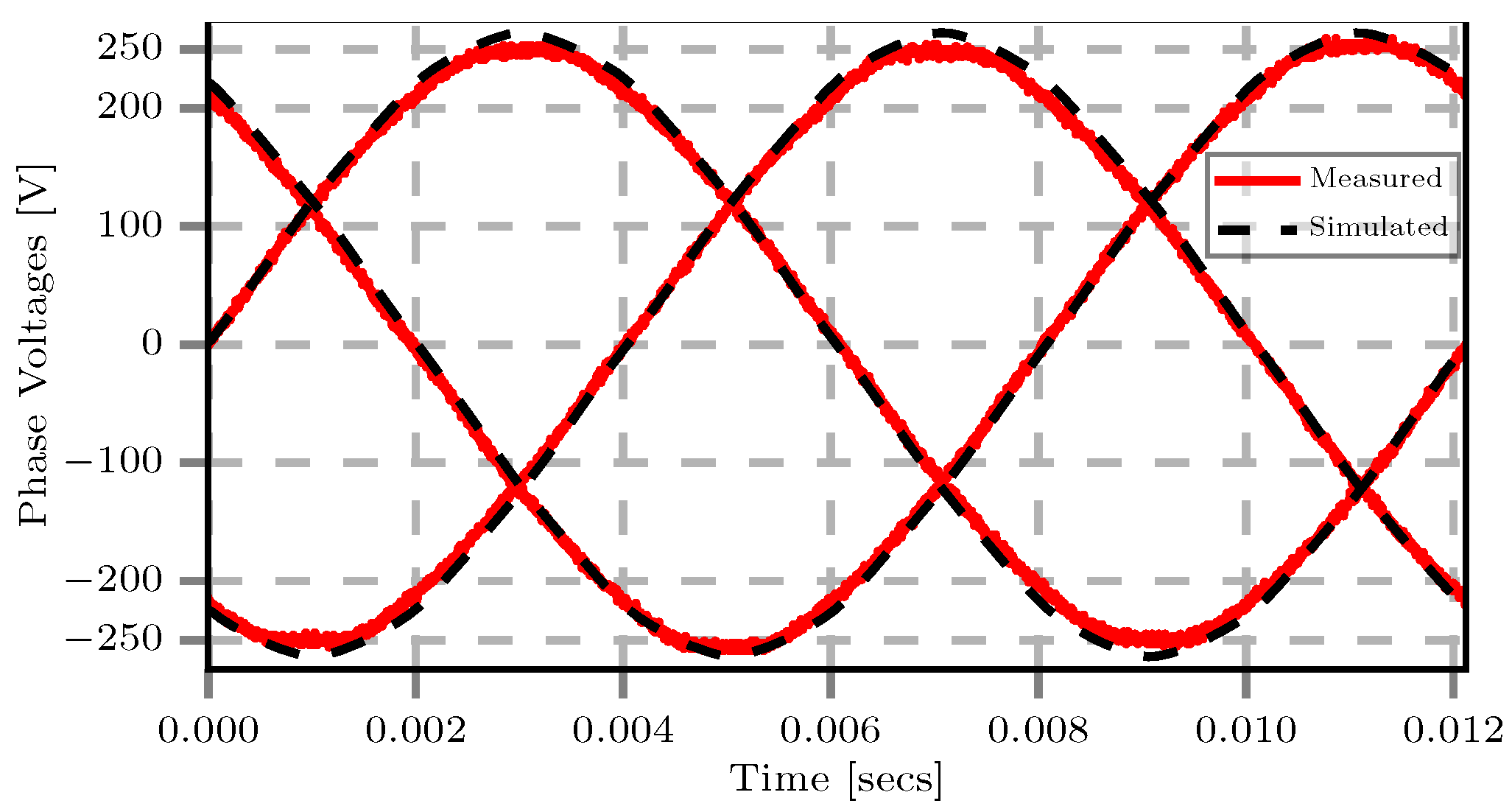
Figure 27 displays the no-load phase back-EMF waveform of the PMVM at a rated speed of 150 rpm. An excellent agreement between the measured and FEM simulated results is evident.
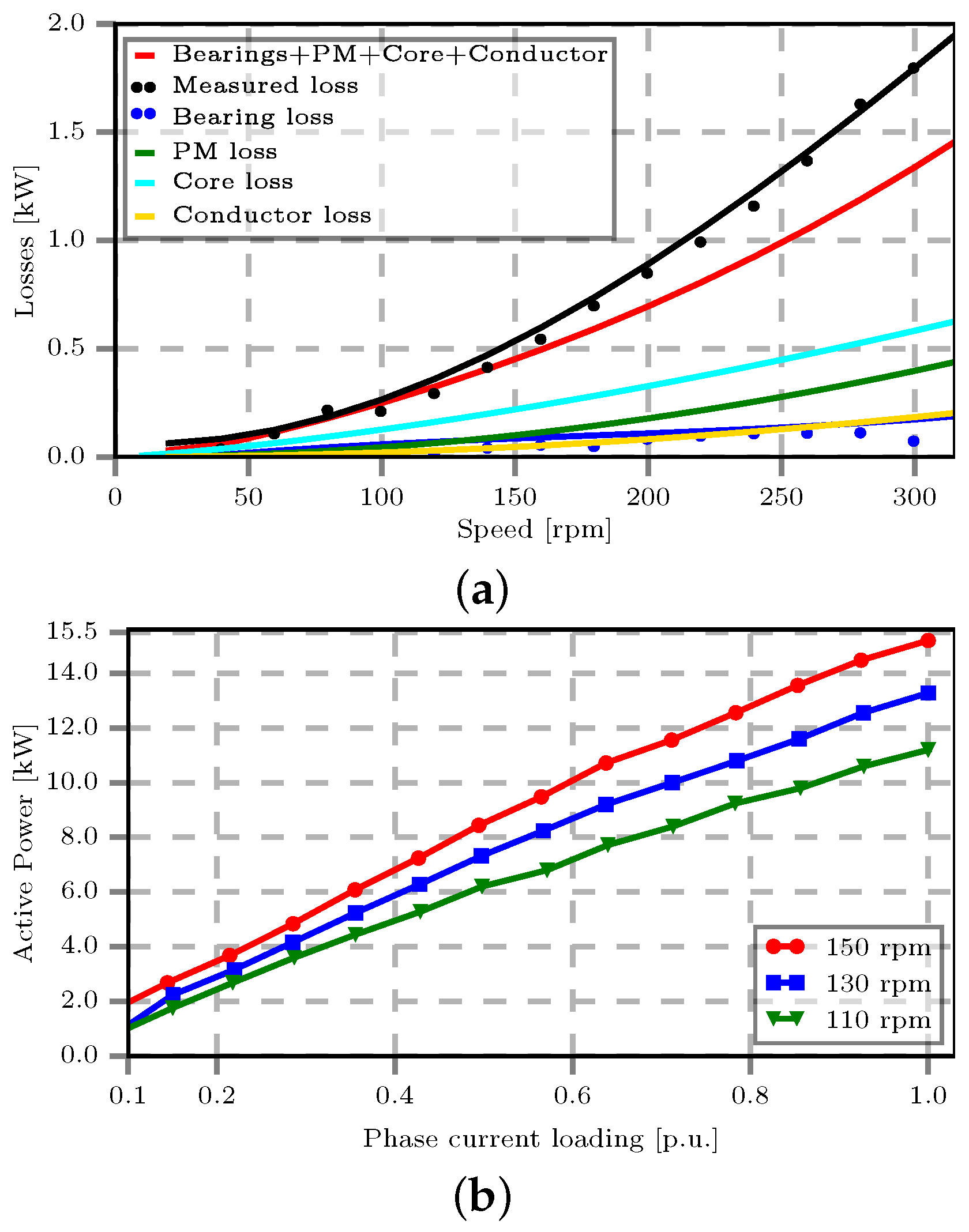
The prototype’s no-load power losses, which include the mechanical losses, eddy-current and hysteresis losses in both the electromagnetically active and non-active components at various speeds are provided in
Figure 28a. The total loss graph rapidly increases at higher speeds because of the excessive core loss that is frequency-dependent. The measured total losses correlate reasonably well with the sum of the measured bearing loss and simulated frequency-dependent losses up to the rated frequency. However, at higher frequencies, the discrepancy between the measured and predicted total losses becomes more significant.
As shown in
Figure 28a, the PM losses and eddy current losses in the stator conductors located in open slots have also been accounted for in the predicted total loss. The remaining discrepancy between the measured and total approximated losses is likely due to (i) the inaccuracy of the implemented core loss model at higher frequency [
41,
42], (ii) underestimated mechanical losses, and (iii) the leakage flux-induced losses in the supporting structure since the simulations were only calculated for the active part of the machine.
Figure 28b presents the active output power at various operating speeds, proving that a power of 15 kW is achieved at the rated load current and speed. This result serves as the confirmation that a designed machine is able to practically deliver the expected output power at rated operating conditions, which validates the implemented design optimization approach.
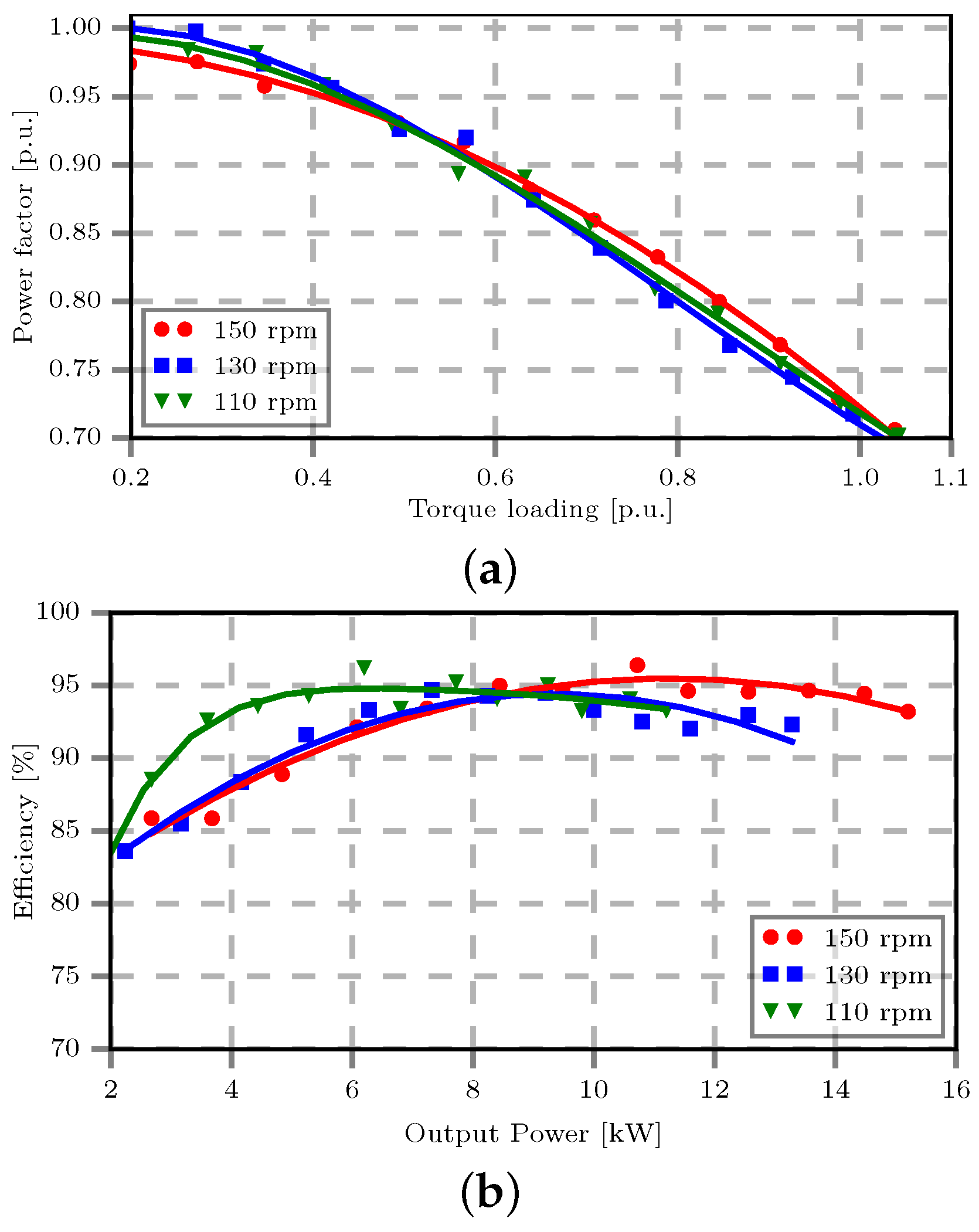
On the one hand, the obtained practical power factor shown in
Figure 29a slightly deviates from the FEM predicted result. However, the trend demonstrated by this result also verifies the fact that the PM Vernier machine’s power factor varies a lot with its torque loading at the maximum torque angle. Due to the overwhelming practical no-load losses indicated in
Figure 28a, the PMVM’s efficiency is also reduced from 94% to just above 93%, as shown in
Figure 29b. The difference is due to the constructional imperfections and inaccurate approximations of certain parameters during the FE modeling. These include the end-winding leakage inductance, temperature and harmonic effects on the losses.
Table 8 presents the machine’s steady-state performance comparison between the experimental and FEM-based results. It can be observed that there is a generally good correlation between them. In addition to confirming the PMVM’s operational principle, the experimental results presented in
Figure 26,
Figure 27,
Figure 28 and
Figure 29 and
Table 8 prove the validity of the implemented design procedure and performance analysis methods. Consequently, it may be inferred that the accuracy of the design and modeling approach for the utility-scale PMVMs is acceptable, and the deduced predictions from FEM will be in reasonable agreement with actual manufactured high-power PMVMs.
8. Conclusions
This paper presents an investigation study on the design and potential implementation of PMVM for large power wind generator applications. Although high gear ratios are usually preferred for small power PMVMs to realize dense torque designs, it is found that lower gear ratios are more attractive to achieve optimum machine designs with reasonable total mass and power factor for utility-scale PMVMs. This is partly attributed to larger equivalent air-gaps and increased leakage flux experienced by large-sized PMVMs.
The study shows that optimum PMVM designs at utility-scale usually push for the lowest gear ratio of five in Type-A machines. This tendency unveiled the competency of Type-B machines with a gear ratio of around three.
The lower PM material usage in a PMVM is advantageous as this translates to a low-cost design (about 20% cheaper than an equivalent PMSM at 3 MW level), but this advantage is offset by the cost of bigger converter capacity needed for a PMVM, which at the end causes the total cost of the two systems to level up. Although this study was based on a relatively conservative PM price, the conclusions drawn here are still legitimate even with higher PM prices (e.g., 60–70% increase in PM prices).
Even though the PMVM is designed to operate at a direct-drive generator input speeds, its operating frequency may need to be in the same range as that of medium-speed generators in order to enhance its best potential. This implies that its inherent soft gearing effects make it an intermediate alternative between the direct-drive and medium-speed concepts. The study predicts that it is feasible and economically viable to develop high-power PM vernier generators for the wind power applications.



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}