
Numerical Study on Aerodynamic Characteristics of Heavy-Duty Vehicles Platooning for Energy Savings and CO2 Reduction


Abstract
:1. Introduction
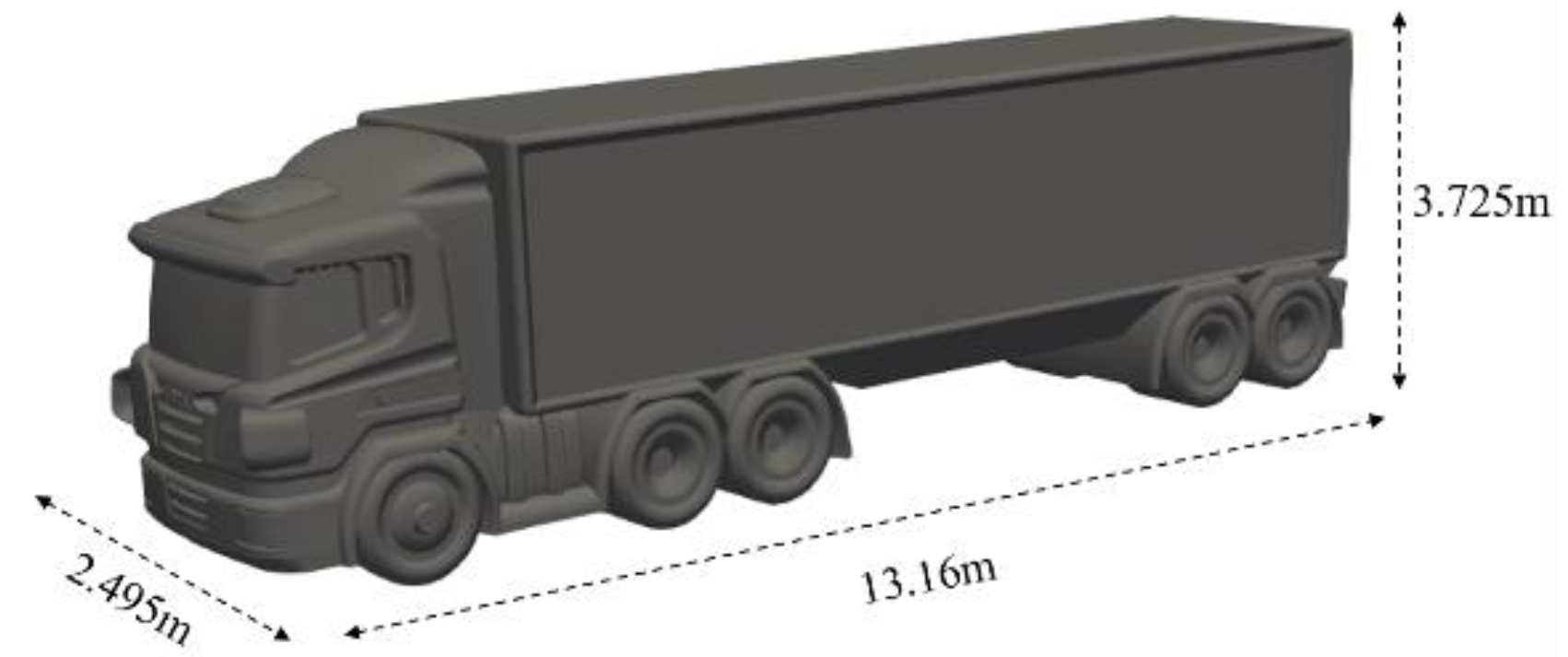
2. Description of the Model Vehicle with Its Numerical Grid
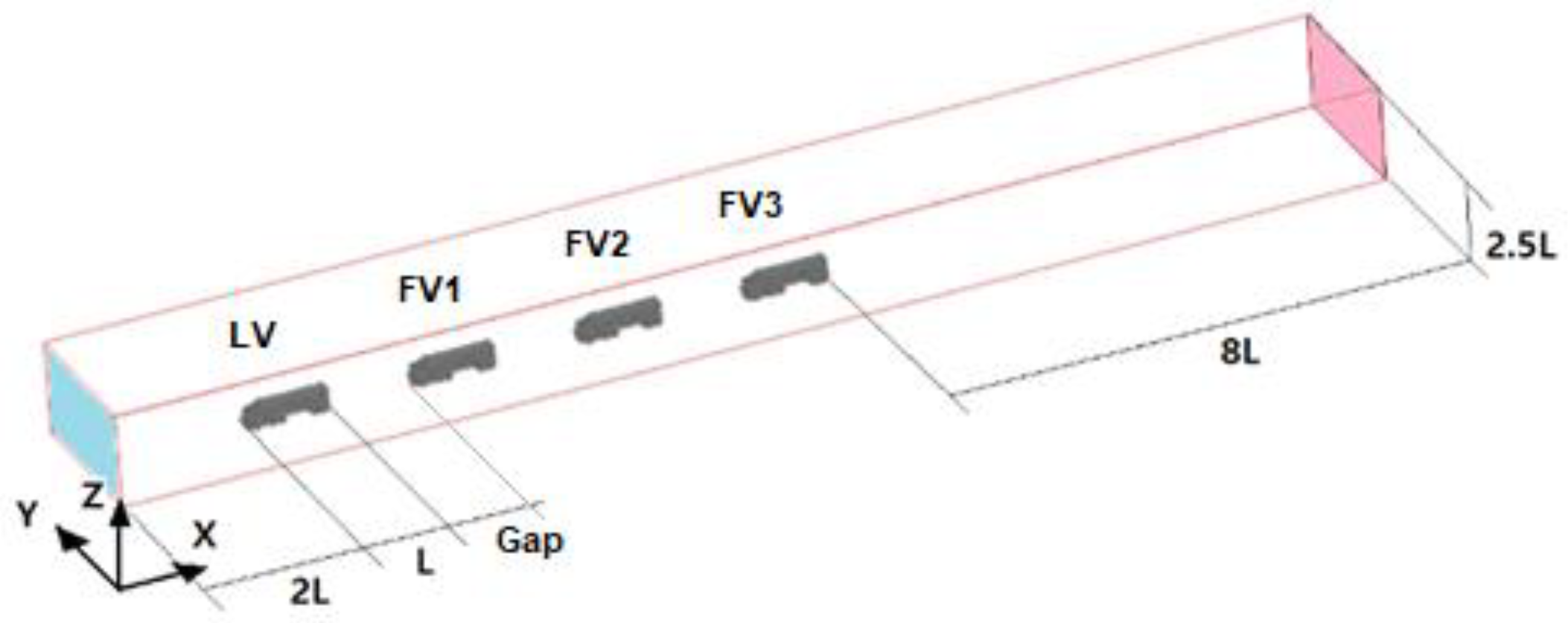
2.1. Numerical Domain and Its Conditions
2.2. Numerical Grid of the Physical Model
3. Numerical Scheme and Its Condition
- Quasi-3D flow.
- Turbulent flow.
- Incompressible flow.
- Steady flow.
3.1. Governing Equations
- (1)
- Continuity equation:
- (2)
- Momentum equation:where .
- (3)
- κ-ε turbulent energy model (KECHEN);
- -
- Turbulent kinetic energy equation:where .
- -
- Energy dissipation equation:where .
3.2. Aerodynamic Pressure Drag
- -
- Drag force (FD)where Ay is the projected area of the model vehicle in the longitudinal direction.
- -
- Drag coefficient (CD)
3.3. Fuel Savings and CO2 Reduction
3.3.1. Traction Power Saved on Each Model Vehicle Platooning
- -
- Tractive power saved,where:
3.3.2. Fuel Saved on Each Model Vehicle Platooning Compared to SV
- -
- Fuel mass and volume flow rate,
- -
- Fuel consumption (fc, km/liter) of a vehicle by aerodynamic resistance,where, , are the lower heating value and density of diesel fuel, is the brake thermal efficiency of the diesel engine. The values are given in Table 2.
3.3.3. Reduction in Carbon Dioxide
4. Results and Discussion
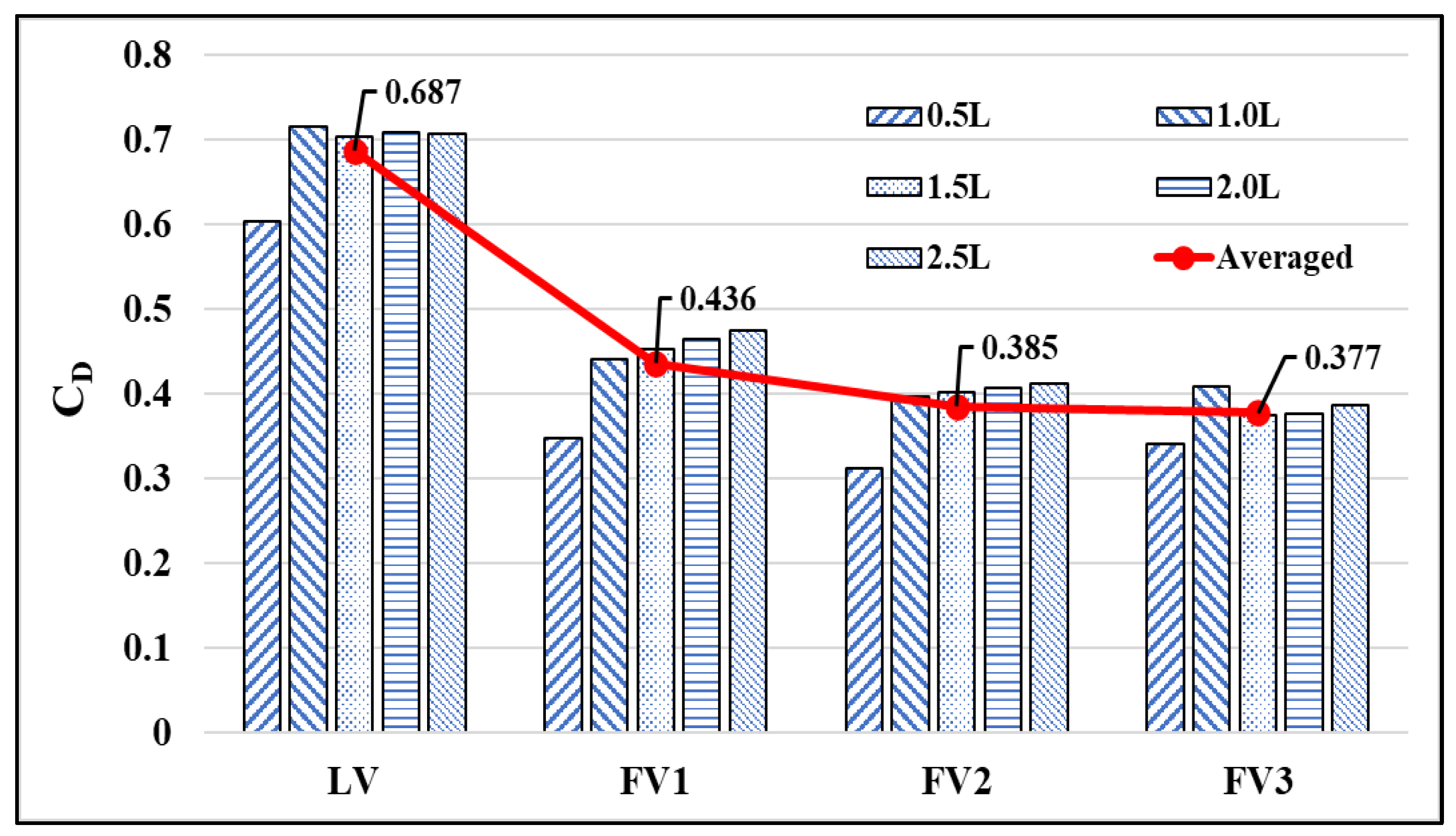
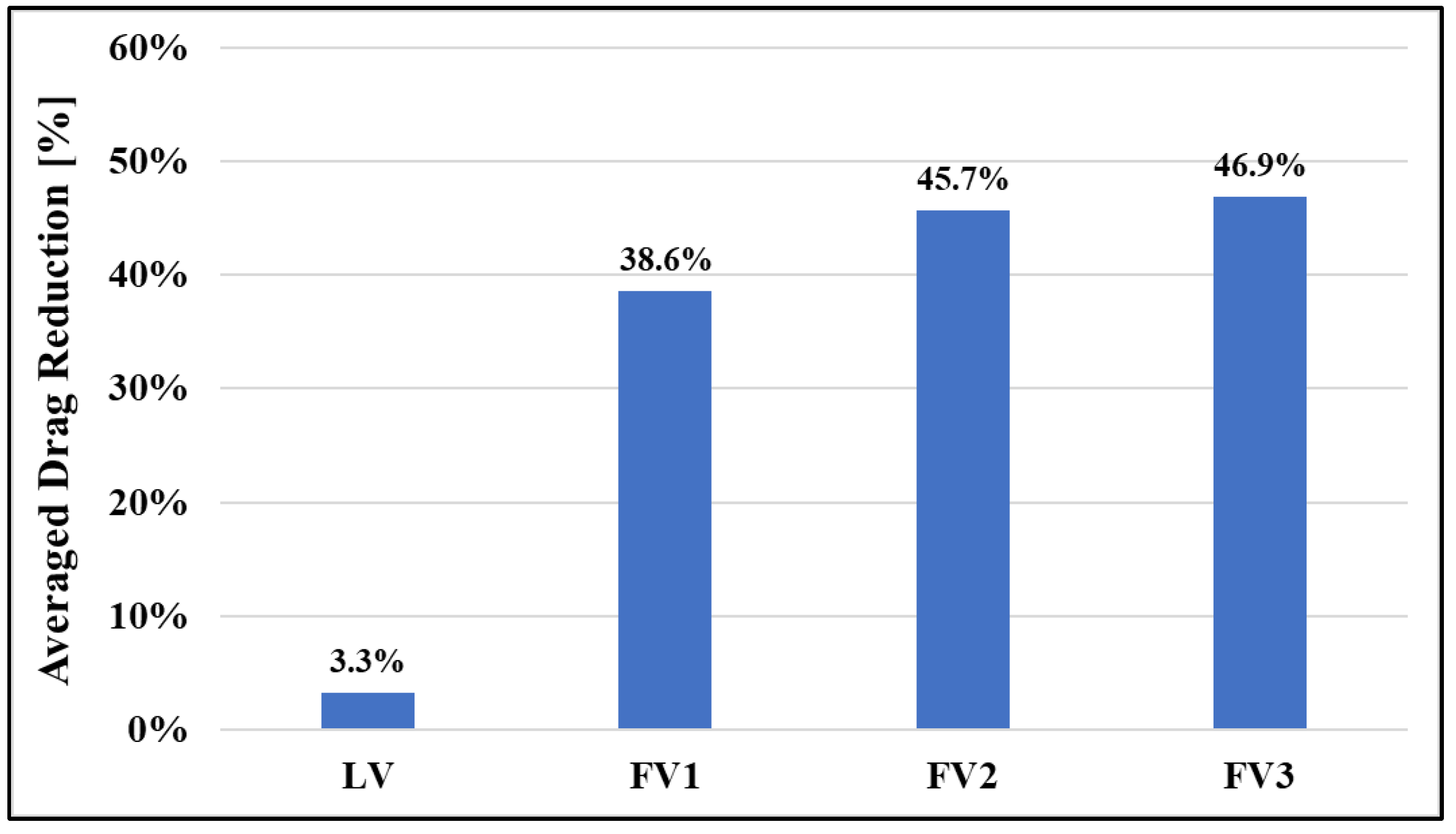
4.1. Aerodynamics Characteristics of the Model Vehicles in Platooning
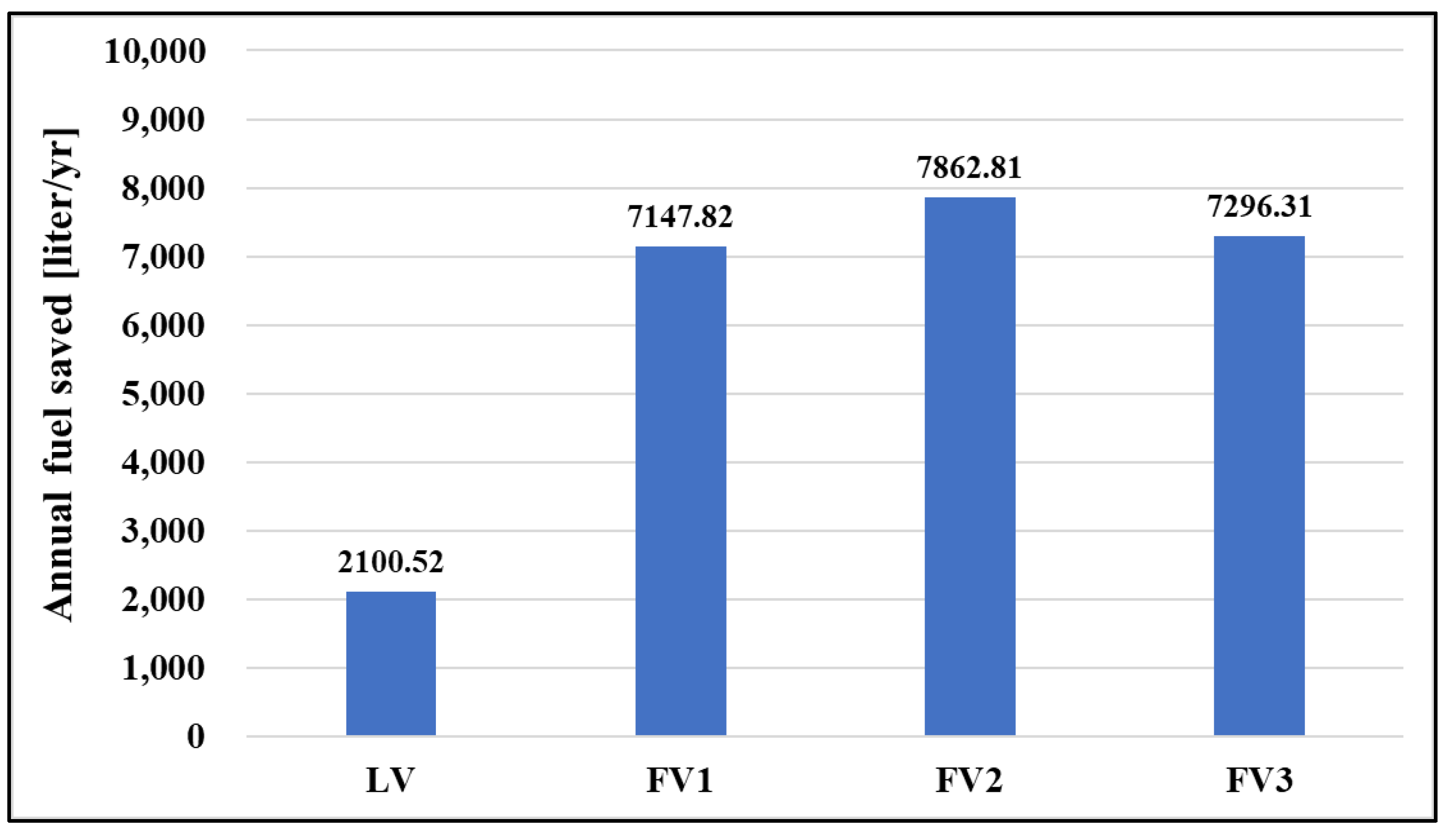
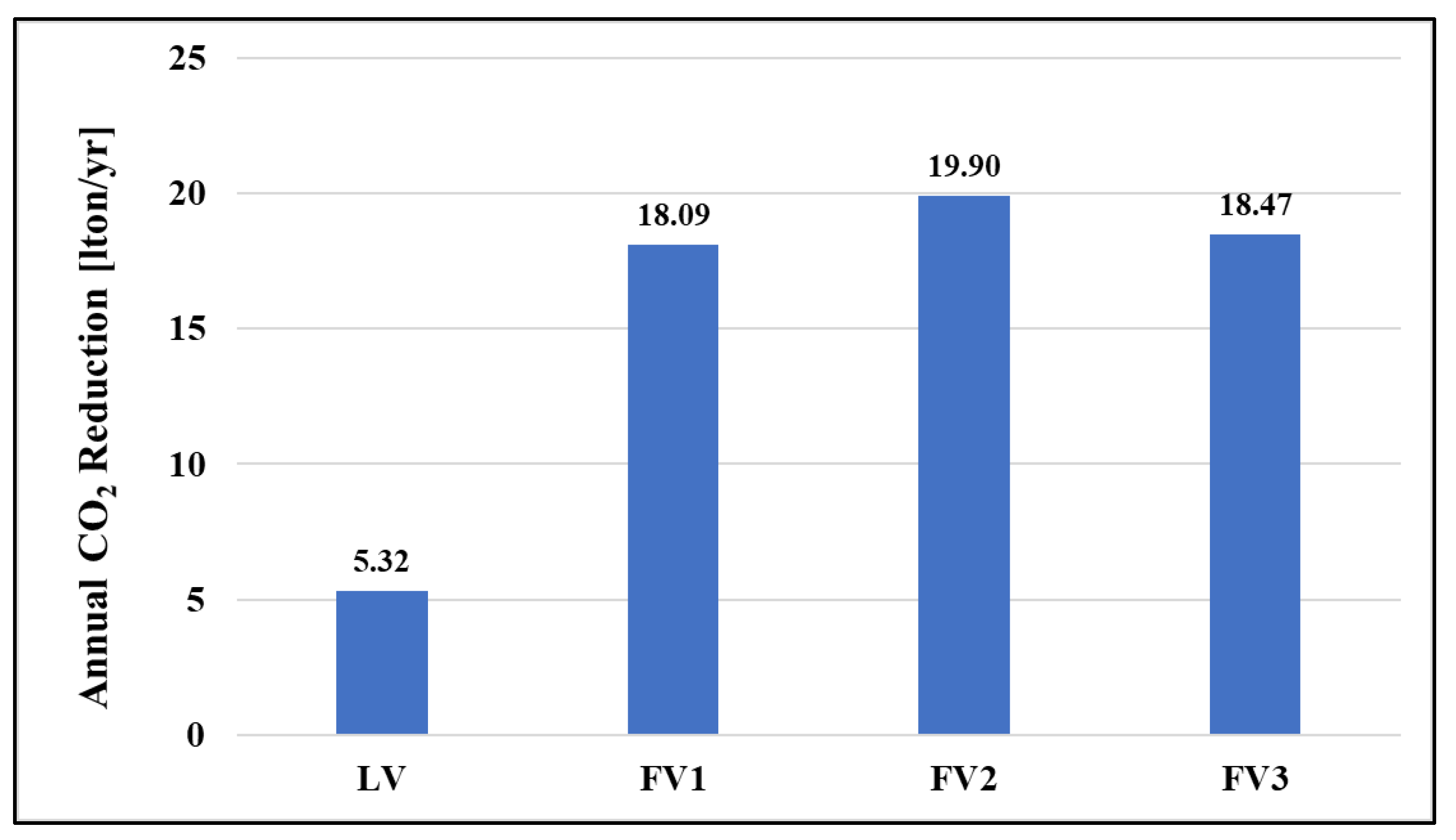
4.2. Fuel Efficiency and GHG Emission Improvement in the Model Vehicles
5. Conclusions
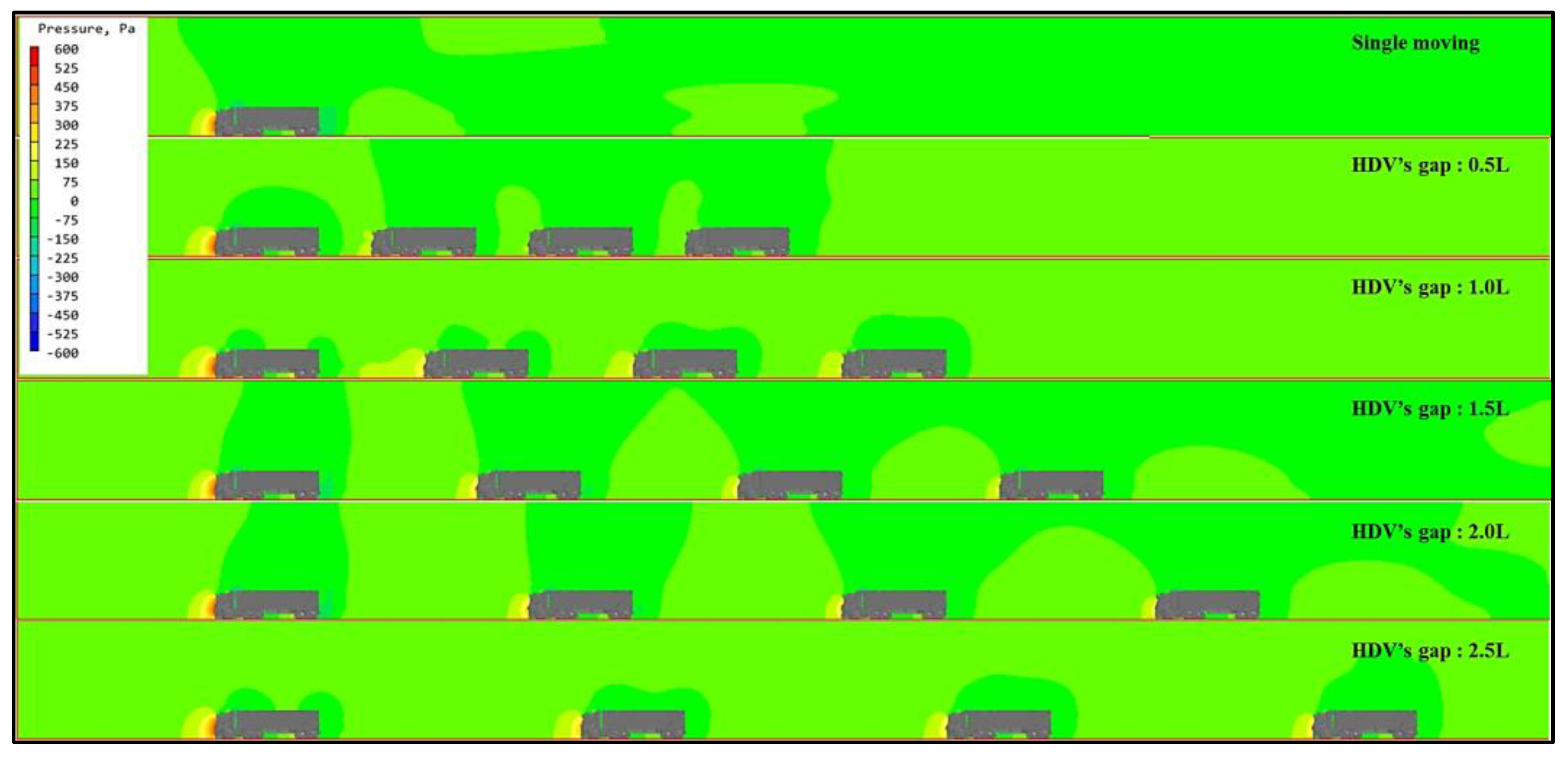
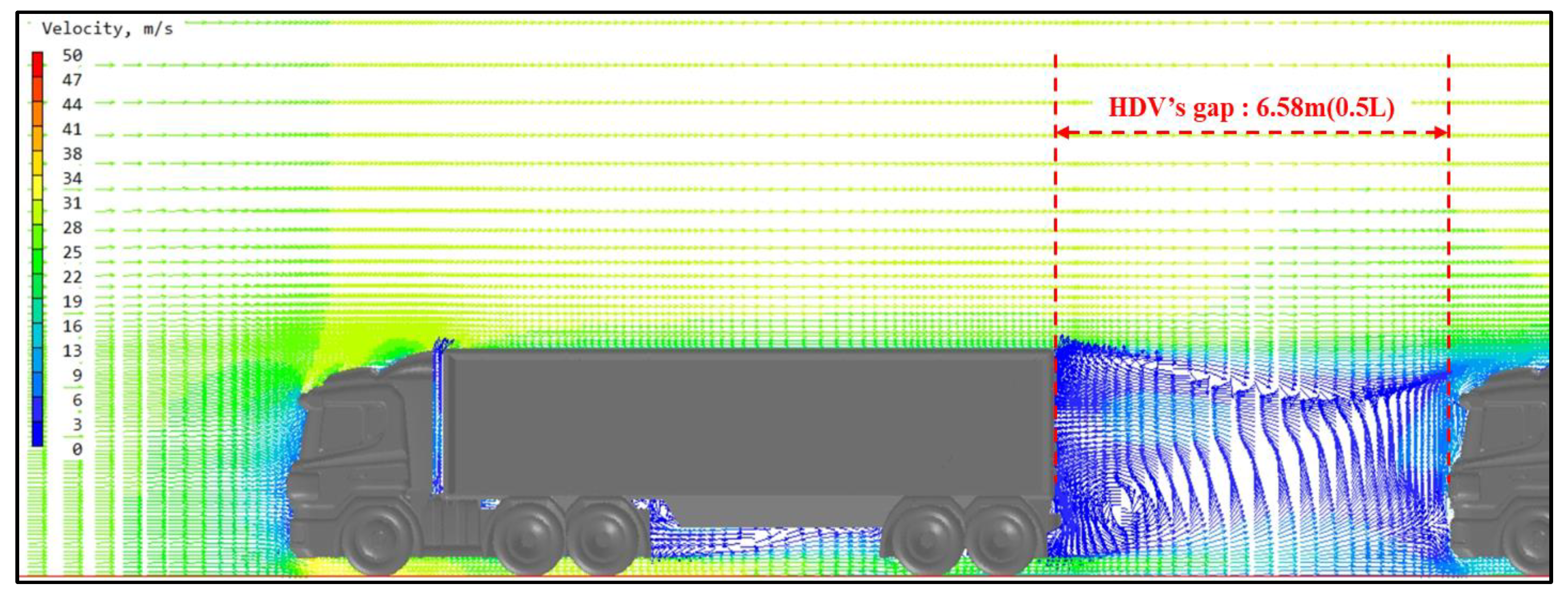
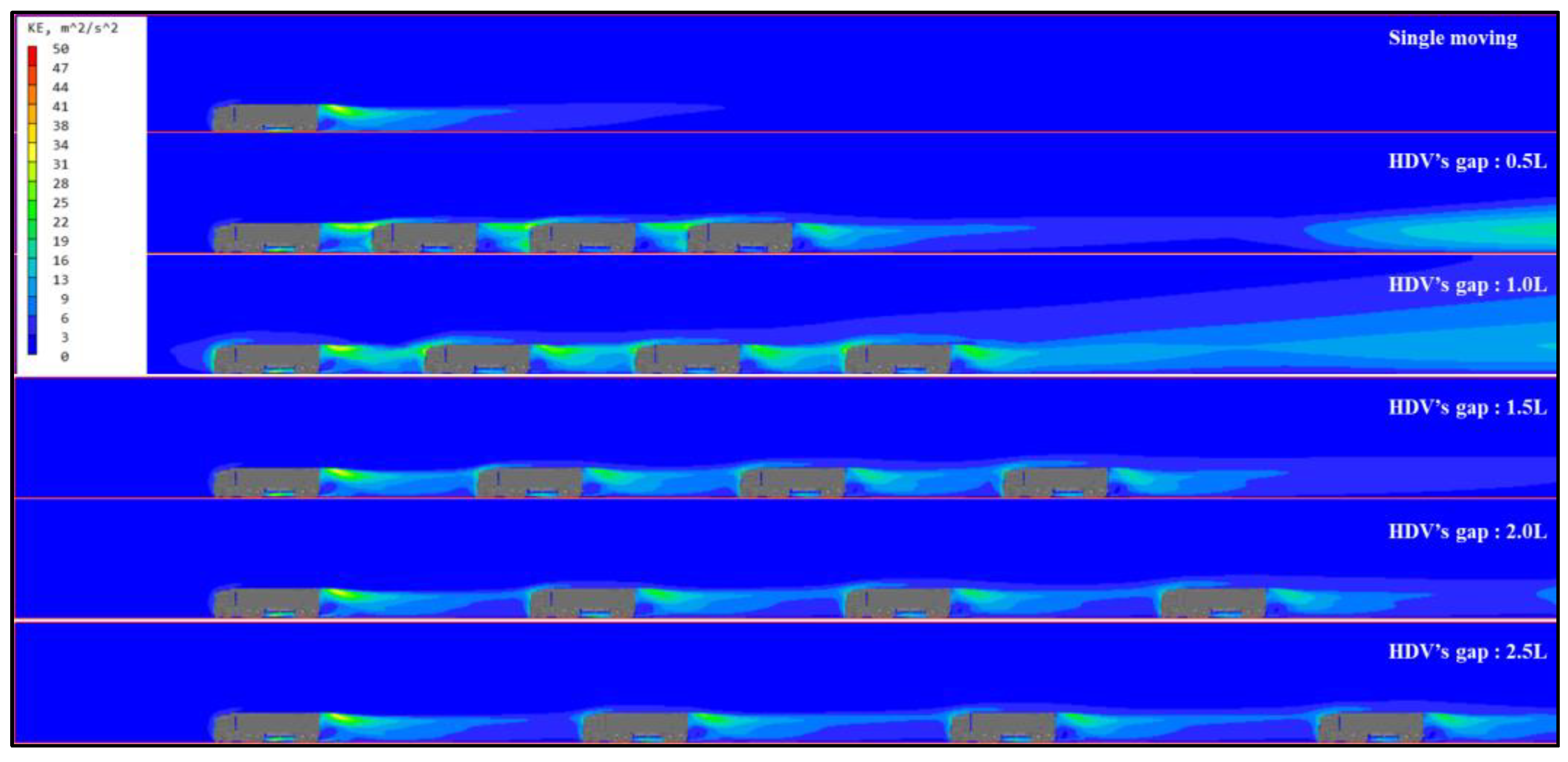
- The stagnation pressure of FV is reduced due to the rear vortex generated by the front leading vehicle. This is the main cause of the drag reduction on the FV. In this study, the drag of FVs was reduced over 50% compared to SV at the gap (0.5 L) (Table 3).
- The shorter the gap between the model vehicles platooning, the smaller CD of FV, which indicates the shorter the gap distance, the more significant the influence of vortex on the FV. As the gap between the model vehicles widens, the rear vortex of the LV gradually decreases and the static pressure recovers to the ambient pressure. It is the reason for increasing the stagnation pressure of FV causing to CD increase.
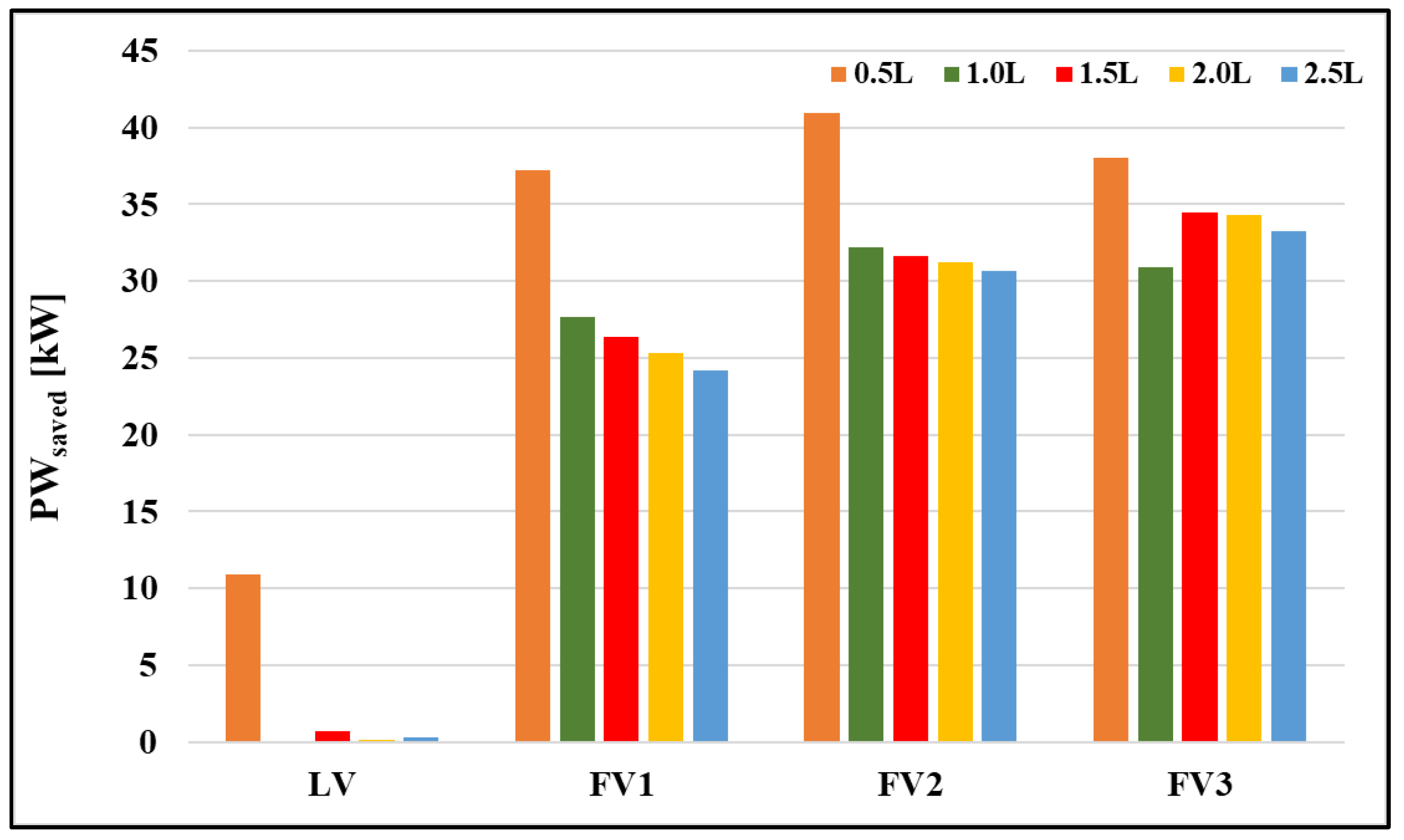
- Platoon driving has very positive effect not only to the fuel savings but also on the GHG reduction. Thus, the platoon driving mode of heavy-duty vehicles would seriously contribute to the logistics industry, economically and environmentally.
- This study hypothesized the driving conditions of autonomous vehicles based on V2X and suggested that the aerodynamic effect can be maximized when an appropriate platoon gap is set in vehicle-to-vehicle distance control. However, this study aimed to confirm the possibility of reducing GHG according to the platooning concept.
- This study performed a theoretical analysis using the FVM numerical simulation method. Platooning simulations were performed under the steady driving condition on a level road with no side wind to determine the fuel economy effect so this study might be used for reference. In future research, we will undertake the aerodynamic driving stability research on vehicle platooning. In the study, the weight of the vehicle with the road condition such as the friction coefficient and slippery factor of the road and the side wind, the gyration radius of the road with the tilted angle, etc., should be the important parameters to evaluate the road-load power for the study.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Buljac, A.; Džijan, I.; Korade, I.; Krizmanić, S.; Kozmar, H. Automobile aerodynamics influenced by airfoil-shaped rear wing. Int. J. Automot. Technol. 2016, 17, 377–385. [Google Scholar] [CrossRef] [Green Version]
- Cihan, B. Numerical drag reduction of a ground vehicle by NACA2415 airfoil structured vortex generator and spoiler. Int. J. Automot. Technol. 2019, 20, 943–948. [Google Scholar] [CrossRef]
- Song, K.S.; Kang, S.O.; Jun, S.O.; Park, H.I.; Kee, J.D.; Kim, K.H.; Lee, D.H. Aerodynamic design optimization of rear body shapes of a sedan for drag reduction. Int. J. Automot. Technol. 2012, 13, 905–914. [Google Scholar] [CrossRef]
- Huluka, A.W.; Kim, C.H. A Numerical Analysis on Ducted Ahmed Model as a New Approach to Improve Aerodynamic Performance of Electric Vehicle. Int. J. Automot. Technol. 2021, 22, 291–299. [Google Scholar] [CrossRef]
- Zhu, W.F.; Jiang, X.H.; Chen, X.; Lin, P.J. Automotive window seal design considering external aerodynamic load and surrogate constraint modeling. Int. J. Automot. Technol. 2016, 17, 853–864. [Google Scholar] [CrossRef]
- Banks, J. Turbulence Modeling in PHOENICS. 2007. Available online: http://www.cham.co.uk/phoenics/d_polis/d_enc/turmod/enc_t342.htm (accessed on 13 June 2021).
- Davila, A.; Nombela, M. Sartre-Safe Road Trains for the Environment Reducing Fuel Consumption through Lower Aerodynamic Drag Coefficient; SAE Technical Paper 2011-36-0060; SAE International: Warrendale, PA, USA, 2011. [Google Scholar]
- Sun, X.; Yin, Y. Behaviorally stable vehicle platooning for energy savings. Trans. Res. Part C Emerg. Technol. 2019, 99, 37–52. [Google Scholar] [CrossRef]
- Ministry of Land, Infrastructure and Transport. Development of Operation Technology for V2X Truck Platooning. Land Infrastructure and Transport R&D Report; 20TLRP-B147674-03; Ministry of Land, Infrastructure and Transport: Sejong, Korea, 2018.
- Shin, K.; Choi, J.; Huh, K. Adaptive cruise controller design without the transitional strategy. Int. J. Automot. Technol. 2020, 21, 675–683. [Google Scholar] [CrossRef]
- Emirler, M.T.; Guvenc, L.; Guvenc, B.A. Design and evaluation of robust cooperative adaptive cruise control systems in parameter space. Int. J. Automot. Technol. 2018, 19, 359–367. [Google Scholar] [CrossRef]
- Saleem, A.; Al Maashri, A.; Al-Rahbi, M.A.; Awadallah, M.; Bourdoucen, H. Cooperative cruise controller for homogeneous and heterogeneous vehicle platoon system. Int. J. Automot. Technol. 2019, 20, 1131–1143. [Google Scholar] [CrossRef]
- Wi, H.; Park, H.; Hong, D. Model predictive longitudinal control for heavy-duty vehicle platoon using lead vehicle pedal information. Int. J. Automot. Technol. 2019, 21, 563–569. [Google Scholar] [CrossRef]
- Kang, Y.; Hedrick, J. Emergency braking control of a platoon using string stable controller. Int. J. Automot. Technol. 2004, 5, 89–94. [Google Scholar]
- Alam, A.; Gattami, A.; Johansson, K.H. An experimental study on the fuel reduction potential of heavy duty vehicle platooning. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; pp. 19–22. [Google Scholar]
- Liang, K.-Y.; Martensson, J.; Johansson, K.H. Heavy-Duty Vehicle Platoon Formation for Fuel Efficiency. IEEE Trans. Intell. Transp. Syst. 2015, 17, 1051–1061. [Google Scholar] [CrossRef]
- Ludwig, J. Concentration Heat and Momentum Limited; CHAM Technical Report TR326; POLIS, Phoenics On-line Information System: London, UK, 2008. [Google Scholar]
- Chen, Y.-S.; Kim, S.-W. Computation of Turbulent Flows Using an Extended K-Epsilon Turbulence Closure Interim Report; No. NAS 1.26: 179204; NASA: Huntsville, AL, USA, 1987.
- Kim, C.H. A streamline design of a high-speed coach for fuel savings and reduction of carbon dioxide. Int. J. Automot. Eng. 2011, 2, 101–107. [Google Scholar] [CrossRef] [Green Version]
- World Nuclear Association. Heat Values of Various Fuels. Available online: http://www.world-nuclear.org/information-library/facts-and-figures/heat-values-of-various-fuels.aspx (accessed on 15 August 2021).
- K-Petro (Korea Petroleum Quality & Distribution Authority). Quality Standard Chart according to Laws. Available online: https://www.kpetro.or.kr/eng/lay1/S210T239C379/contents.do (accessed on 15 August 2021).
- Suppes, G.J.; Storvick, T.S. Sustainable Power Technologies and Infrastructure: Energy Sustainability and Prosperity in a Time of Climate Change; Academic Press: Cambridge, MA, USA, 2015; Chapter 5. [Google Scholar]
- Guendehou, S.; Koch, M.; Hockstad, L.; Pipatti, R.; Yamada, M. Draft 2006 IPCC Guidelines for National Greenhouse Gas Inventories; Institute for Global Environmental Strategies: Hayama, Japan, 2006; Chapter 5. [Google Scholar]
- Davila, A.; del Pozo, E.; Aramburu, E.; Freixax, A. Environmental Benefits of Vehicle Platooning; 2013-26-0142; SAE International: Warrendale, PA, USA, 2013. [Google Scholar]
- Chan, E. SARTRE automated platooning vehicles. In Towards Innovative Freight and Logistics; Wiley: Hoboken, NJ, USA, 2016; Volume 2, pp. 137–150. [Google Scholar]
- KOTI (The Korea Transport Institute). Report 62. 2021. Available online: https://www.koti.re.kr/user/bbs/BD_selectBbs.do?q_bbsCode=1093&q_bbscttSn=20210726174721314 (accessed on 20 August 2021).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Boundary Surface | Boundary and Initial Conditions |
|---|---|
| Inlet | Velocity boundary: 100 km/h |
| Outlet | Pressure boundary: ambient pressure, 1 atm |
| Sides and top | Open boundary: symmetric conditions |
| Ground | Moving boundary condition: 100 km/h |
| Model surface | No-slip wall |
| MJ/kg | kg/m3 | [%] |
|---|---|---|
| 42 | 815 | 0.40 |
| Gap | CD | CD Reduction Rate [%] | |
|---|---|---|---|
| Single Moving Vehicle (SV) | 0.710 | - | |
| 0.5 L | LV | 0.604 | 15% |
| FV1 | 0.347 | 51% | |
| FV2 | 0.311 | 56% | |
| FV3 | 0.340 | 52% | |
| 1.0 L | LV | 0.710 | 0% |
| FV1 | 0.440 | 38% | |
| FV2 | 0.396 | 44% | |
| FV3 | 0.409 | 42% | |
| 1.5 L | LV | 0.704 | 1% |
| FV1 | 0.453 | 36% | |
| FV2 | 0.402 | 43% | |
| FV3 | 0.374 | 47% | |
| 2.0 L | LV | 0.709 | 0% |
| FV1 | 0.464 | 35% | |
| FV2 | 0.406 | 43% | |
| FV3 | 0.376 | 47% | |
| 2.5 L | LV | 0.707 | 0% |
| FV1 | 0.474 | 33% | |
| FV2 | 0.411 | 42% | |
| FV3 | 0.386 | 46% | |
| Vehicle’s Gap | Fuel Mileage [km/Liter] | ||||
|---|---|---|---|---|---|
| Single Moving | LV | FV1 | FV2 | FV3 | |
| 0.5 L | 5.2 | 6.1 | 10.7 | 11.9 | 10.9 |
| 1.0 L | 5.2 | 8.4 | 9.3 | 9.0 | |
| 1.5 L | 5.2 | 8.2 | 9.2 | 9.9 | |
| 2.0 L | 5.2 | 8.0 | 9.1 | 9.8 | |
| 2.5 L | 5.2 | 7.8 | 9.0 | 9.6 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jo, J.; Kim, C.-H. Numerical Study on Aerodynamic Characteristics of Heavy-Duty Vehicles Platooning for Energy Savings and CO2 Reduction. Energies 2022, 15, 4390. https://doi.org/10.3390/en15124390
Jo J, Kim C-H. Numerical Study on Aerodynamic Characteristics of Heavy-Duty Vehicles Platooning for Energy Savings and CO2 Reduction. Energies. 2022; 15(12):4390. https://doi.org/10.3390/en15124390
Chicago/Turabian StyleJo, Junik, and Chul-Ho Kim. 2022. "Numerical Study on Aerodynamic Characteristics of Heavy-Duty Vehicles Platooning for Energy Savings and CO2 Reduction" Energies 15, no. 12: 4390. https://doi.org/10.3390/en15124390
APA StyleJo, J., & Kim, C.-H. (2022). Numerical Study on Aerodynamic Characteristics of Heavy-Duty Vehicles Platooning for Energy Savings and CO2 Reduction. Energies, 15(12), 4390. https://doi.org/10.3390/en15124390