
Graphic Method to Evaluate Power Requirements of a Hydraulic System Using Load-Holding Valves

 ,
,  and
and
Abstract
:1. Introduction
2. Review of Load-Holding Valves

3. The State of the Art
3.1. About Instability
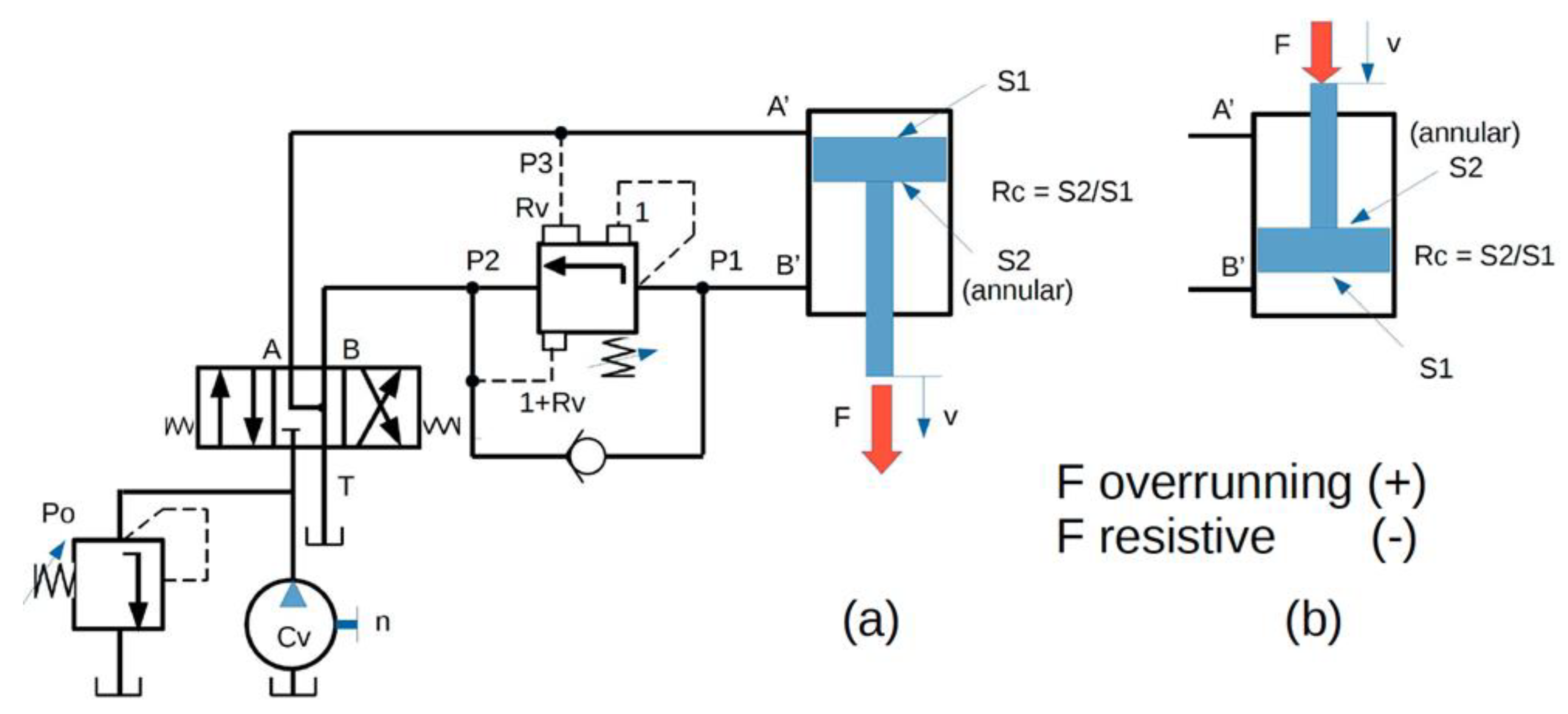
- k, elastic constant of the spring of LHV
- kf, flow force constant
- V1, hydraulic cylinder piston side chamber volume
- V2, hydraulic cylinder rod side chamber volume
- xLHV, lifting height of the spool/poppet with respect to the seat surface of the LHV
3.2. About Modeling
3.3. About Energetic Aspects
3.4. Performance Curves
- a
- They all provide a simple and generic description of how it works, symbols, valve cavity, specifications or technical data, and some performance graphs or characteristic curves.Typical technical data include maximum operating pressure, setting pressure (cracking pressure) interval, nominal flow, pilot ratio, internal leakage, and hysteresis, among others.
- b
- Although graphical presentations of performance should help viewers quickly and easily understand the critical information, there is no unanimous agreement on which are the most appropriate. Of the different ways of expressing its performance, the next conditions may be pointed out:
- i
- Pressure drop in pilot operation condition (valve fully opened by the pilot pressure), (from port 1 to port 2, see Figure 1).
- ii
- Pressure drop in check valve operating condition (free flow) (from port 2 to port 1) and
- iii
- Pressure drop in pressure relief working condition (valve opened by the load). Unfortunately, some technical documents or specification sheets do not provide this minimum information, which is necessary for applying LHVs in a system.
- c
4. Graphic Method to Estimate the Power Balance
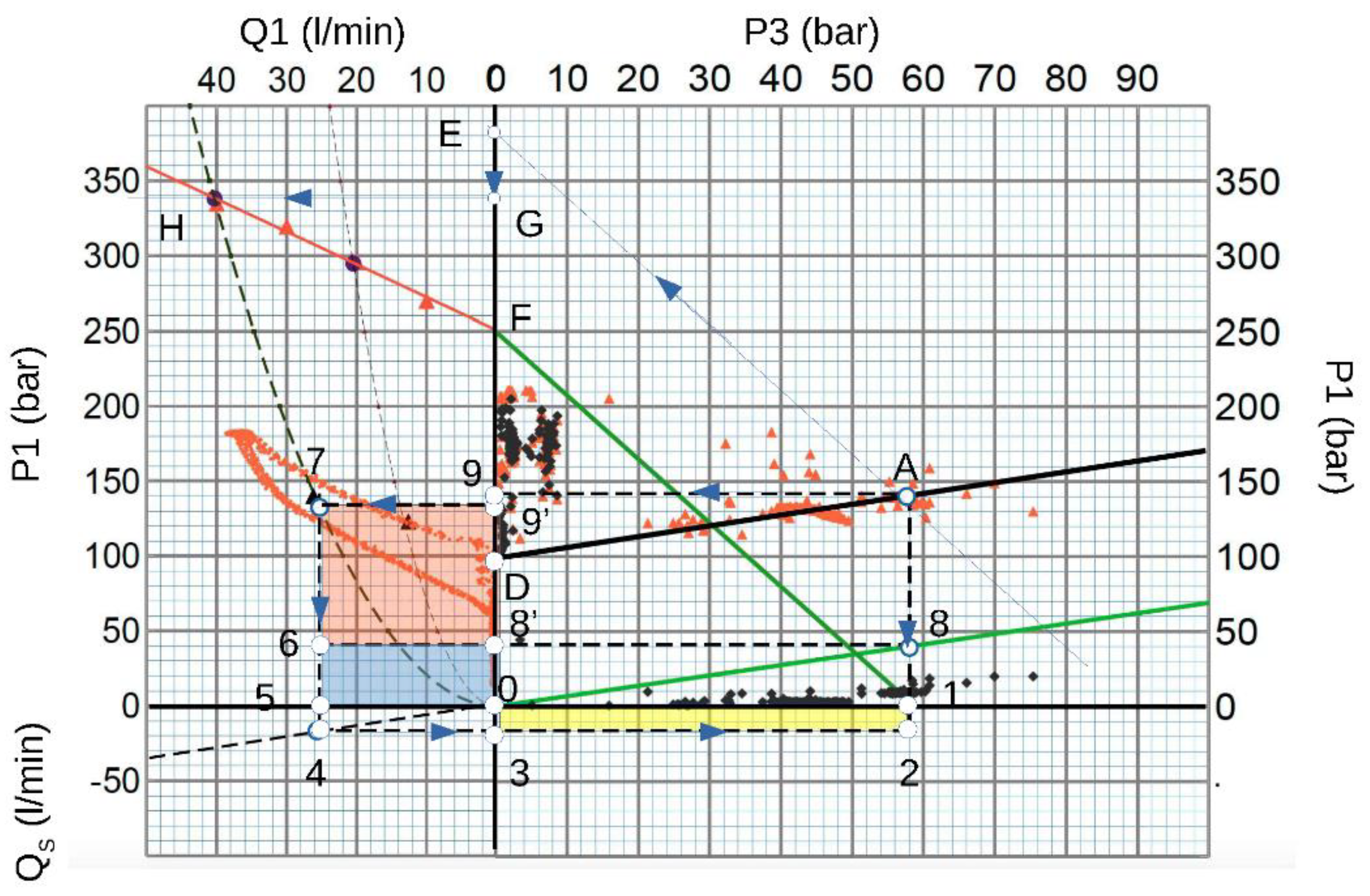
4.1. Description of the Four-Quadrant Diagram
- x-axis (+): pilot pressure (P3) in bar which corresponds to the pressure that prevails in the actuator rod chamber
- x-axis (−): flow through the load holding valve (Q1) in L/min, equal to the flow leaving the piston side actuator chamber
- y-axis (+): load pressure (P1) in bar, corresponding to the pressure in the actuator piston chamber
- y-axis (−): flow rate entering the piston side actuator chamber (QS) in L/min according to the configuration of the hydraulic circuit shown in scenario (2b), Figure 2.
- -
- First quadrant “I”: Upper right region. It is used to represent the characteristic curve of the hydraulic actuator and the characteristic curve of the load-holding valve.
- -
- Second quadrant “II”: Upper left region. It is used to show the characteristic curve of the load holding valve acting as a pressure-limiting valve (relief function).
- -
- Third quadrant “III”: Lower left region. It is used as an auxiliary two-dimensional space.
- -
- Fourth quadrant “IV”: Lower right region. It is used as an auxiliary two-dimensional space.
4.1.1. Steady-State Operating Curve and Hydraulic Cylinder Characteristic Curve
4.1.2. Characteristic Curve of an LHV Valve Acting as a Pressure Limiting Valve (Relief Function)
4.1.3. Power Balance Applied to the Actuator/LHV Hydraulic System
- -
- Curve 10–12: characteristic curve P1 = f(P3) of the LHV valve in the static balance position (closing condition). It corresponds to the representation of Equation (1). Load force
- -
- Curve 11–13: characteristic curve P1 = f(P3) of the LHV valve in the permanent regime when a flow rate Q1 flows through the valve, as a consequence of the opening of the obturator by the action of pressure P1 and pilot pressure P3. Load force constant
- -
- Curve O–C: characteristic curve P1 = f(P3) of the hydraulic actuator when it is subjected to zero force. It corresponds to the representation of Equation (3).
- -
- Curve D–A: characteristic curve P1 = f(P3) of the hydraulic actuator when it is subjected to an overrunning force, F = constant.
- -
- Curve 10–B: characteristic curve P = f(Q) of the LHV valve acting as a pressure limiting valve (relief function). See Equation (28).
- -
- Curve O–7–B: LHV poppet pressure drop in the open position as a result of the shutter opening due to the action of the pressure P1 and the pilot pressure P3. See Equation (31).
- -
- point 7: This point is defined by the coordinates (Q1, P1), intersection of the curve (0–B), with the line of constant pressure equal to P1.
- -
- point 5: defined by the coordinates (Q1, 0)
- -
- point 1: defined by the coordinates (P3, 0)
- -
- point 3: defined by the coordinates (0, QS)
5. Experimental Validation
5.1. Lab Testing
5.2. Field Testing
Procedure
- Plot the working point A (e.g., P1 = 142 bar and P3 = 58 bar);
- Plot LHV curve based on its setting point Pm = 250 bar and the pilot ratio 4.25 as it is shown in Table 1 (e.g., straight-line 1F);
- Plot an auxiliary line parallel to 1F at the A point projecting it to the pressure axis (e.g., E point);
- Calculate the effect of the return pressure using the equation P2·(Rv + 1), which is represented by the segment EG. G point represents PM pressure shown in Equation (1);
- Trace a horizontal line crossing at A point to obtain the working pressure (e.g., point 9);
- Obtain the differential pressure P1-P2 by plotting 9′ position (e.g., segment length between 0–9′).Actions in the second quadrant:
- Plot the relief LHV function curve taking the setting pressure as 250 bar (e.g., the experimental curve shown in Figure 10b);
- Draw a horizontal line starting at G and crossing the LHV function curve (e.g., H point is obtained). Therefore, the K3 constant can be calculated from Equation (3) obtained using H coordinated, ;
- The parabolic performance following Equation (31);
- Trace a horizontal line across 9′ to obtain the coordinates of intersection with the parabolic curve OH to bring point 7, which corresponds to the orifice working conditions;
- Draw a vertical segment from point 7 to the flow axis to obtain the flow Q1 through the valve (point 5);
- Extend the cylinder actuator characteristic curve from the first quadrant to the third quadrant (segment “04”, as an extension of segment “08”);
- The pump flow rate QS is represented by point 3, which is calculated from point 4 by crossing the vertical axis;
- Extend line “4–3” to the intersection with the vertical line through point 1, obtaining point 2;
- The graphics method provides flow rate (represented by points 3 and 5 compared with experimental ones, as shown in Table 4).
- -
- “(0123)” area represents the power, NS (yellow area)
- -
- “(0568′)” area has an identical area of “(0123)” (blue area)
- -
- “(679′8′)” area is equivalent to the power load, F·v (red area)
- -
- “(0579′)” area is the power dissipated in the valve, , which is equal to the sum of “(0568′)” and “(679′8′)”
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbol | Description | Unit |
| A | area | m2 |
| Cd | orifice coefficient | - |
| Cha | hydraulic capacitance | m3/bar |
| F | force | N |
| Gpilot | gradient pilot function | |
| Grelief | gradient relief function | |
| K1 | spring constant | N/m |
| K2,3 | generic constant | - |
| M | mass | kg |
| N | power | W |
| P | load pressure | bar |
| Ppilot | pilot pressure | bar |
| Prelief | relief pressure | bar |
| Q | flow rate | l/min |
| R | ratio | - |
| S | cylinder area | m2 |
| V | volume | m3 |
| v | velocity | m/s |
| x | position | m |
| subscripts | ||
| 1 | rod side | |
| 2 | return | |
| 3 | pilot | |
| c | cylinder | |
| LHV | Load Holding Valve | |
| s | supply | |
| v | pilot | |
| greek | ||
| ρ | fluid density | kg/m3 |
| ϕ | energetic goodness’ ratio | - |
References
- Nervegna, N. Oleodinamica e Pneumatica; Politeko, T., Ed.; Politeko: Arlington, VA, USA, 2003. [Google Scholar]
- Zarotti, G.L.; Nervegna, N. Rational Design of Mobile Hydraulics by Digital Computer; SAE Ed.: Warrendale, PA, USA, 1979. [Google Scholar]
- Ritelli, G.F.; Vacca, A. Energetic and Dynamic Impact of Counterbalance Valves in Fluid Power Machines. Energy Convers. Manag. 2013, 76, 701–711. [Google Scholar] [CrossRef]
- Overdiek, G. Design and Characteristics of Hydraulic Winch Controls by Counterbalance Valves. In European Conference on Hydrostatic Transmissions for Vehicle Applications; Mechanical Engineering Publications Limited for the Institution of Mechanical Engineers: Aachen, Germany, 1981. [Google Scholar]
- Persson, T.; Krus, P.; Palmberg, J.-O. The Dynamic Propertles of Over-Center Valves in Mobile Systems. In Proceedings of the 2nd International Conference on Fluid Power Transmission and ControI, Hangzhou, China, 20–22 March 1989; Zhejiang University: Hangzhou, China, 1989. [Google Scholar]
- Miyakawa, S. Stability of a Hydraulic Circuit with a Counter-Balance Valve. Bull. JSME 1978, 21, 1750–1756. [Google Scholar] [CrossRef]
- Handroos, H.; Halme, J.; Vilenius, M. Steady State and Dynamic Properties of Counterbalance Valves. In Proceedings of the 3rd Scandinavian International Conference on Fluid Power (SICFP’93), Linköping, Sweden, 25–26 May 1993. [Google Scholar]
- Chapple, P.J.; Tilley, D.G. Evaluation Techniques for the Selection of Counterbalance Valves. In Proceedings of the Expo and Technical Conference for Electrohydraulic and Electropneumatic Motion Control Technology, Anaheim, CA, USA, 23–24 March 1994. [Google Scholar]
- Rahman, M.M.; Porteiro, J.L.F.; Weber, S.T. Numerical Simulation and Animation of Oscillating Turbulent Flow in a Counterbalance Valve. In Proceedings of the IECEC-97 Thirty-Second Intersociety Energy Conversion Engineering Conference (Cat. No.97CH6203), Honolulu, HI, USA, 27 July–1 August 1997; Volume 2, pp. 1525–1530. [Google Scholar]
- Lisowski, E.; Stecki, J.S. Stability of a Hydraulic Counterbalancing System of a Hydraulic Winch. In Proceedings of the Sixth Scandinavian Intl. Conf. on Fluid Power, Tampere, Finland, 26–28 May 1999; pp. 921–933. [Google Scholar]
- Andersen, T.O.; Hansen, M.R.; Pedersen, P.; Conrad, F. The Influence of Flow Force Characteristics on the Performance of over Centre Valves. In Proceedings of the 9th Scandinavian International Conference on Fluid Power, Linköping, Sweden, 1–3 June 2005. [Google Scholar]
- Liu, X.; Liu, X.; Wang, L.; Chen, J. The Dynamic Analysis and Experimental Research of Counter Balance Valve Used in Truck Crane. In Proceedings of the 2010 International Conference on Electrical and Control Engineering, Wuhan, China, 25–27 June 2010; College of Mechanical Science and Engineering: Tampere, Finland, 2010. [Google Scholar]
- Zähe, B.; Anders, P.; Ströbel, S. A New Energy Saving Load Adaptive Counterbalance Valve. In Proceedings of the 10th International Conference on Fluid Power, Dresden, Germany, 8–10 March 2016; pp. 425–436. [Google Scholar]
- Jakobsen, J.H.; Hansen, M.R. CFD Assisted Steady-State Modelling of Restrictive Counterbalance Valves. Int. J. Fluid Power 2020, 21, 119–146. [Google Scholar] [CrossRef]
- Andersson, B.R. Energy Efficient Load Holding Valve. In Proceedings of the 11th Scandinavian International Conference on Fluid Power SICFP, Linköping, Sweden, 2–4 June 2009; Volume 9. [Google Scholar]
- Kjelland, M.B.; Hansen, M.R. Numerical and Experiential Study of Motion Control Using Pressure Feedback. In Proceedings of the 13th Scandinavian International Conference on Fluid Power, SICFP2013, Linköping, Sweden, 3–5 June 2003. [Google Scholar]
- Sørensen, J.K.; Hansen, M.R.; Ebbesen, M.K. Novel Concept for Stabilising a Hydraulic Circuit Containing Counterbalance Valve and Pressure Compensated Flow Supply. Int. J. Fluid Power 2016, 17, 153–162. [Google Scholar] [CrossRef]
- de Groof, A.G. Instability of Counterbalance Valves; Hogeschool: Rotterdam, The Netherlands, 2014. [Google Scholar]
- Sciancalepore, A.; Vacca, A.; Weber, S. An Energy-Efficient Method for Controlling Hydraulic Actuators Using Counterbalance Valves with Adjustable Pilot. J. Dyn. Syst. Meas. Control 2021, 143, 111007. [Google Scholar] [CrossRef]
- Christensen, M. Design Af Hydraulisk Lastholdeventil. Design Af Mekaniske Systemer. Master’s Thesis, Aalborg Universitet, Aalborg, Denmark, 2007. [Google Scholar]
- Vukovic, M.; Leifeld, R.; Murrenhoff, H. Reducing Fuel Consumption in Hydraulic Excavators—A Comprehensive Analysis. Energies 2017, 10, 687. [Google Scholar] [CrossRef] [Green Version]
- Mahato, A.C.; Ghoshal, S.K. Energy-Saving Strategies on Power Hydraulic System: An Overview. Proc. Inst. Mech. Eng. Part J. Syst. Control Eng. 2021, 235, 147–169. [Google Scholar] [CrossRef]
- Roquet, P.; Raush, G.; Berne, L.J.; Gamez-Montero, P.-J.; Codina, E. Energy Key Performance Indicators for Mobile Machinery. Energies 2022, 15, 1364. [Google Scholar] [CrossRef]
- Berne, L.J.; Raush, G.; Gamez-Montero, P.J.; Roquet, P.; Codina, E. Multi-Point-of-View Energy Loss Analysis in a Refuse Truck Hydraulic System. Energies 2021, 14, 2707. [Google Scholar] [CrossRef]
- Rydberg, K.-E. Energy Efficient Hydraulics—System Solutions for Minimizing Losses; National Conference on Fluid Power, “Hydraulikdagar’15”; Linköping University: Linköping, Sweden, 2015. [Google Scholar]
- Lin, T.; Chen, Q.; Ren, H.; Huang, W.; Chen, Q.; Fu, S. Review of Boom Potential Energy Regeneration Technology for Hydraulic Construction Machinery. Renew. Sustain. Energy Rev. 2017, 79, 358–371. [Google Scholar] [CrossRef]
- Axin, M. Fluid Power Systems for Mobile Applications with a Focus on Energy Efficiency and Dynamic Characteristics. Ph.D. Thesis, Fluid and Mechatronic Systems Department of Management and Engineering, Linköping University, Linköping, Sweden, 2013. [Google Scholar]
- Sciancalepore, A.; Vacca, A.; Pena, O.; Weber, S.T. Lumped Parameter Modeling of Counterbalance Valves Considering the Effect of Flow Forces. In Proceedings of the ASME/BATH 2019 Symposium on Fluid Power and Motion Control, FPMC 2019, Longboat Key, FL, USA, 7–9 October 2019. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cylinder | LHV | System/Load | |||
|---|---|---|---|---|---|
| Piston diameter | 100 mm | Pilot ratio | 4 | Relief valve | 250 bar |
| Rod diameter | 63 mm | Setting pressure | 325 bar | PLoad (min) | 0 bar |
| Section ratio | 0.603 | Load max | 270 bar | PLoad (example) | 100 bar |
| Nominal flow | 90 L/min | ||||
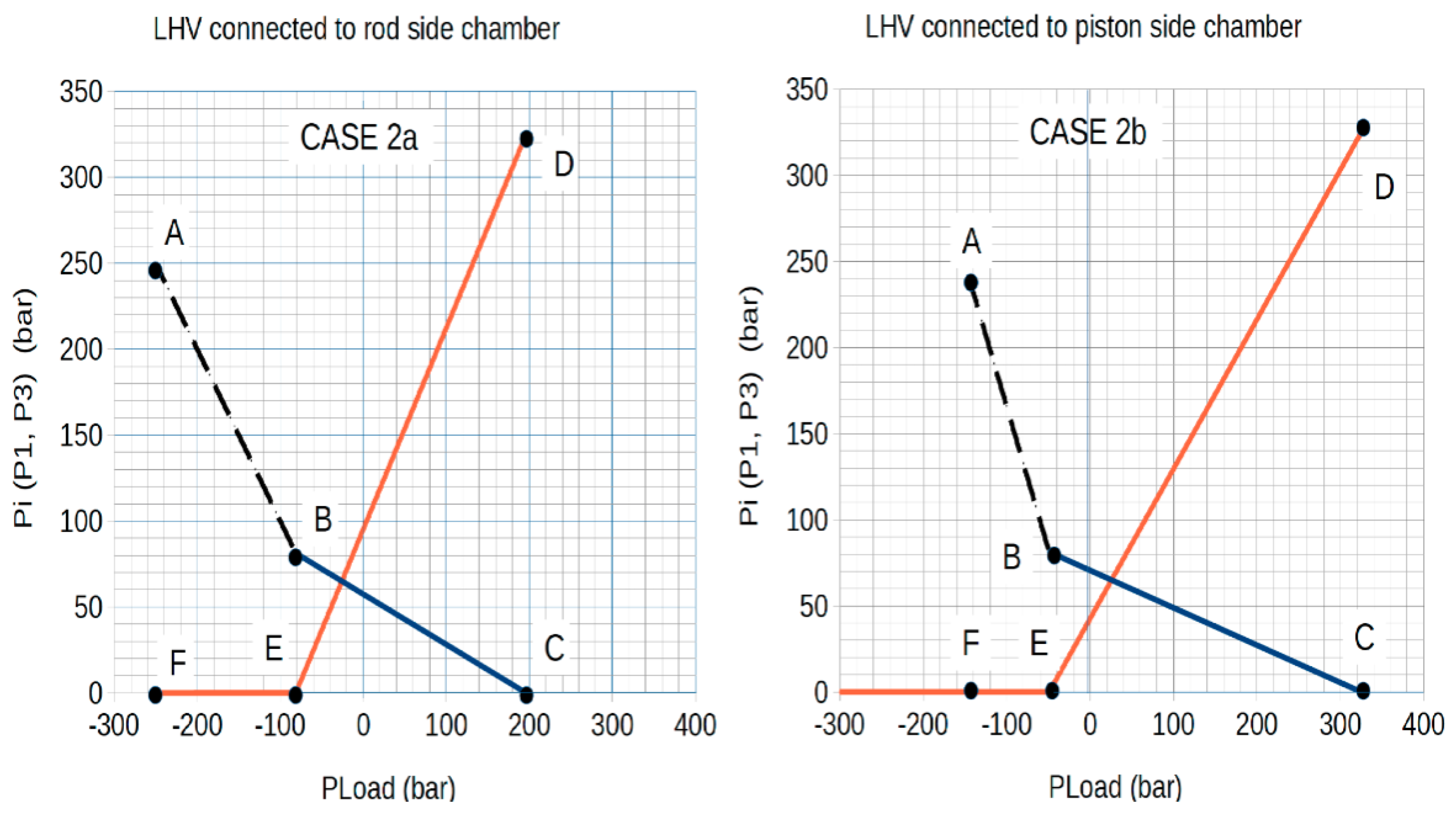
| Case (2a) | x | y | x | y |
|---|---|---|---|---|
| A | Pvlp | Pvlp | 250 | 250 |
| B | (1/Rv)·PM | 1/Rv PM | 81 | 81 |
| C | Rc·PM | 0 | 196 | 0 |
| D | Rc PM | PM | 196 | 325 |
| E | (1/Rv)·PM | 0 | 81 | 0 |
| F | Pvlp | 0 | 250 | 0 |
| Case (2b) | x | y | x | y |
| A | Rc Pvlp | Pvlp | 151 | 250 |
| B | Rc/Rv | 1/Rv PM | 49 | 81 |
| C | PM | 0 | 325 | 0 |
| D | PM | PM | 325 | 325 |
| E | (Rc/Rv)·PM | 0 | 49 | 0 |
| F | Rc Pvlp | 0 | 151 | 0 |
| Magnitude | Manufacturer | Model | Range | Accuracy |
|---|---|---|---|---|
| Pressure | WIKA | MH2 | 0–250/0–400 bar | >0.5% span |
| Flow | HYDAC | EVS3199TF | 6–60 L/min | >2% act. val. |
| Position | Micro Epsilon | WDS-1500_PS60-SR-U | 0–1500 mm | >+/−1.5 mm |
| Angle (tilt) | SICK | TMM 56E-PMH045 | +/−45° | +/−0.3° |
| Temperature | Omega | PT100 | 10–100° | >0.36 °C |
| Go down Slow | Go down Fast | |||
|---|---|---|---|---|
| load pressure | P1 | bar | 132 | 142 |
| return pressure | P2 | bar | 3 | 9.21 |
| pilot pressure | P3 | bar | 42 | 58 |
| supply flow | QS | l/min | 9 | 18 |
| valve flow | Q1 | l/min | 13 | 26 |
| setting pressure | Pm | bar | 250 | 250 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Berne, L.J.; Raush, G.; Roquet, P.; Gamez-Montero, P.-J.; Codina, E. Graphic Method to Evaluate Power Requirements of a Hydraulic System Using Load-Holding Valves. Energies 2022, 15, 4558. https://doi.org/10.3390/en15134558
Berne LJ, Raush G, Roquet P, Gamez-Montero P-J, Codina E. Graphic Method to Evaluate Power Requirements of a Hydraulic System Using Load-Holding Valves. Energies. 2022; 15(13):4558. https://doi.org/10.3390/en15134558
Chicago/Turabian StyleBerne, Luis Javier, Gustavo Raush, Pedro Roquet, Pedro-Javier Gamez-Montero, and Esteban Codina. 2022. "Graphic Method to Evaluate Power Requirements of a Hydraulic System Using Load-Holding Valves" Energies 15, no. 13: 4558. https://doi.org/10.3390/en15134558
APA StyleBerne, L. J., Raush, G., Roquet, P., Gamez-Montero, P. -J., & Codina, E. (2022). Graphic Method to Evaluate Power Requirements of a Hydraulic System Using Load-Holding Valves. Energies, 15(13), 4558. https://doi.org/10.3390/en15134558