1. Introduction
According to [
1], the simplest equivalent model of a photovoltaic (PV) cell is composed of an ideal current source in parallel with a real diode. The current delivered by this current source is proportional to the solar irradiance falling upon the cell. As PV cells are not generally capable of producing large voltages on their own (a large cell may only produce
[
1]), multiple cells are commonly connected together in series to form a PV
module. A large PV module, such as in [
2], is often composed of 72 series-connected cells. When series-connected PV cells within a module receive differing levels of solar irradiance, this most simple model is no longer representative.
Figure 1 (adapted from [
1]) illustrates the conundrum—this model would suggest that no current could flow to the load if a single cell is shaded [
1].
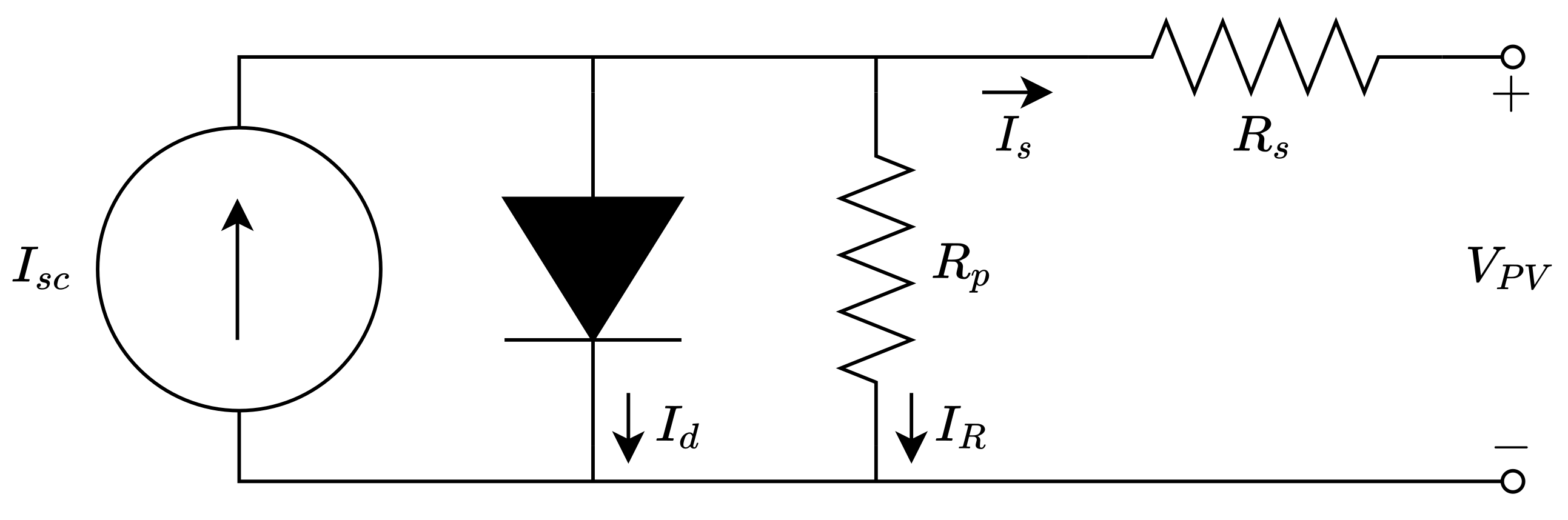
A parallel leakage resistance,
, is often incorporated, which overcomes the aforementioned issue. Functionally, the component
models the effects of leakage currents within the P-N junction [
3]. Furthermore, a series resistance,
, is commonly added to model the effects of contact resistances (such as those between the PV cell and its wire leads, as well as the resistances of the leads themselves) [
1,
3]. These additions result in what is frequently referred to as the
single-diode model, which is shown in
Figure 2 (adapted from [
1]). Although the addition of
now provides a current path through a completely shaded PV cell, the power dissipated in
gives rise to the
hot spot phenomenon, whereby the temperature of the PV cell increases. For a standard 156
× 156
(millimetre) PV cell,
can be in the region of tens-to-hundreds of Ohms [
4]. For a string current of multiple ampere, a fully shaded cell would dissipate an unsustainable level of power as heat energy. This is disadvantageous for two reasons: (1) electrical energy produced by unshaded PV cells in the string would be wasted, and (2) if the critical power dissipation (commonly denoted as
), a metric specified by PV cell manufacturers, is exceeded, then the shaded PV cell may become irreversibly damaged. In the case of the former, the power loss in a partially shaded PV installation is greater than the proportion of shaded area [
5], and, in the case of a small PV installation, shading of a relatively small proportion of the plant may result in substantial power losses or the entire failure of the system [
5,
6]. From both the power production and cell longevity perspectives, it would be favourable to electrically remove shaded PV cells from a string, i.e., bypassing them [
1,
5,
7,
8].
In order to accomplish this, a
bypass diode is commonly added in parallel with either a single PV cell or a string of multiple series-connected PV cells. To illustrate the concept, a system of two series-connected PV cells is shown in
Figure 3. Here, each PV cell is represented by the single-diode model, and these cells deliver current to a load. Each PV cell is also in parallel with a single bypass diode. During normal operation, with both PV cells exposed to equal levels of solar irradiance, both bypass diodes would be in reverse bias (i.e., only a negligible leakage current would be conducted through the bypass diodes). If, however, the PV cells were exposed to differing levels of solar irradiance, as is the case in
Figure 3, then the bulk of the string current,
, would pass through the bypass diode associated with the shaded PV cell. Little current may pass through the parallel leakage resistance of the shaded cell. However, the power dissipated in this cell would be greatly reduced (thereby mitigating the aforementioned negative effects of shading). Although it would be ideal for a bypass diode to be placed in parallel with each PV cell in a string, this is often cost-prohibitive and practically challenging. Hence, bypass diodes are generally placed in parallel with multiple series-connected PV cells, and are housed within a weatherised junction box on the rear of a PV module—as shown in
Figure 4.
When choosing an appropriate bypass diode, the forward voltage,
, should be lower than the total breakdown voltage,
, of the PV cell(s) across which the bypass diode is to be connected [
8]. Furthermore, the maximum repetitive (peak) reverse voltage,
, should be greater than the voltage produced by the PV cell(s) across which the diode is connected—thereby preventing reverse breakdown of the bypass diode during normal operation of the PV cell(s) [
8]. Finally, the maximum average forward rectified current,
, should be greater than the maximum PV string current [
8].
Schottky diodes are the default choice for the bypass diode purpose. This is primarily due to their low forward voltages, which result in relatively low levels of dissipated power. Schottky diodes with a rated forward current of 10–20
, which typically have a forward voltage of 0.4–0.8
at this current, are generally suitable for this purpose [
9,
10,
11].
The prevalent failure mode of a Schottky diode is a short circuit, which occurs when the diode is exposed to a large (typically transient) current in the reverse bias [
12]. If this failure were to occur, the current produced by the PV cell(s) across which the bypass diode is connected would simply circulate through the short circuit—negating any possible contribution of those cells to the total string power.
Bypass diodes, therefore, play a critical role in the functioning of a PV system. Their correct operation is highly beneficial in terms of both power production and cell longevity. Their (short circuit) failure, especially if occurring early on and remaining undetected in a plant with a life cycle spanning multiple decades, would be tragic. Despite this, their operation is generally either over-simplified or omitted altogether in simulations and practical experiments involving the analysis of the effects of surges within PV systems [
13,
14,
15,
16].
As a result, it is imperative that the conditions to which bypass diodes are exposed within an actual PV system are well understood. This is most easily accomplished using computer simulation tools. For this, accurate models are required.
For completeness, it should be noted that much research has been performed on shade mitigation measures in recent years. At the array level, reconfigurable electrical interconnection strategies have been investigated. These strategies actively reconfigure the PV module interconnections, temporarily electrically removing entire PV modules, in order to attain maximum power production [
17]. At the individual cell scale, [
7] demonstrates a successful commercial implementation of miniature bypass diodes on a per-cell basis. Also indicated in [
7] are multiple strategies for optimal bypass diode implementation, where each bypass diode protects multiple PV cells—either in an overlapping or non-overlapping manner. The authors of [
18] reconsider the concept of bypass diodes altogether, indicating their long-term shortcomings and reviewing possible alternative measures for shading mitigation (including active switching-based techniques within PV modules).
Although great advances in shading mitigation techniques have been made, the simple Schottky diode-based mitigation strategy, whereby a single bypass diode is connected in parallel with a number of PV cells, is still prevalent in many PV installations. As PV plants commonly have an expected service life which extends beyond 20 years, it is not expected that this practice will change in short order. It is for this reason that accurate circuital modelling of the bypass diode operation at the traditionally implemented scale, for use in the simulation of surges within PV installations, will still be relevant for decades to come. In this article, three appropriate Schottky diodes are examined and modelled: the HY 10SQ045 [
9], the DC Components Co. LTD. 15SQ040 [
10], and the Vishay VSB2045 [
11].
4. Results
Results were gathered for both the DC large-signal and AC small-signal cases.
4.1. DC Results
For the DC current–voltage measurements, the voltage probe was placed as close as physically possible to the diode junctions. This was in order to negate the influence of the resistance of the wire leads on , leaving only the resistive influence of the contact between the junction and the wire leads. This remaining component of was then observed to be negligible for these measurements (i.e., no discernible linear trend that was attributable to was embedded within the measured data).
4.1.1. Forward Bias
The forward bias case was considered first. Although the influence of the oscilloscope input resistance would be negligible for the forward bias measurements, its influence was compensated for nonetheless. Nonlinear curve fitting was performed for the three diodes using the Shockley equation as the objective function, i.e., Equation (
1), with the convergence-assisting parameter,
, set to 0. The thermal voltage,
, was calculated with Equation (
5) using the parameters listed in
Table 4. The default values for
k (the Boltzmann constant) and
q (the charge on an electron) were used [
20]. Due to the difficulty in measuring the junction temperature of the diode (as a result of the plastic casing),
T was assumed to be the same as the ambient temperature for the low power levels tested. This fitting procedure produced the parameters which are listed in
Table 5. The resulting measured and fit current–voltage curves for the three diodes are shown in
Figure 19. Good agreement was achieved for all three diodes for the forward bias. Divergence from the modelled trends begins to occur at larger currents—this is attributed to the influence of a decreasing thermal voltage,
, as the result of an increasing junction temperature,
T, as the power dissipated in diode junctions increases.
4.1.2. Reverse Bias
The reverse bias case was then considered. The reverse voltage over each diode was increased until just after breakdown occurred. Breakdown was regarded as the sharp point where the reverse current began to increase rapidly for even a minor increase in the reverse voltage; this is illustrated in the measured results later in this section. The reverse breakdown voltages, as well as the corresponding reverse currents, are listed in
Table 6 below.
The parallel leakage resistance,
, has the greatest influence at low voltages—well before the effects of reverse breakdown are noted. After compensating for the input impedance of the oscilloscope, as well as the influence of the
from the forward bias case (due to the leakage through
as a result of the SPICE diode model), a linear curve was fit to the measured data for the region between 0
and 25
. This allowed for
to be calculated for each of the three diodes. The resulting values of
are listed below in
Table 7, and the measured and fit current–voltage plots are shown in
Figure 20.
After
was calculated, its influence was removed from the measured data. This left only the current–voltage relationship of
, to which the Shockley equation was fit for the region between 0
and the lowest voltage above which reverse breakdown of the diodes would occur. The parameters for the resulting fit are listed in
Table 8. The measured and fit current–voltage curves for the
component of the three diodes are shown in
Figure 21.
Finally, the breakdown voltage and current of each diode were entered into the
component of the DC large-signal sub-model, along with the parameters from
Table 5,
Table 7 and
Table 8. With
set to 0
in each case, the DC large-signal sub-model for each diode was simulated in LTspice. Simulations were also performed with
and
removed from the model, in order to illustrate the difference between the proposed DC large-signal sub-model and the standard SPICE current–voltage reverse breakdown behaviour. The results for the 10SQ045, 15SQ045, and VSB2045 diodes are shown in
Figure 22,
Figure 23 and
Figure 24, respectively. For the 10SQ045 and 15SQ045 diodes, the DC large-signal sub-model accurately models the measured reverse bias current–voltage relationship. The VSB2045 model is also accurate, except for a minor disagreement between the reverse voltages of 56
and 58
. In general, the reverse bias current–voltage characteristics of the DC large-signal sub-model far exceed the accuracy of the standard SPICE large-signal model.
4.2. AC Small-Signal Results
AC small-signal results were then gathered, firstly without and then with the application of a DC bias voltage, in order to determine , , and .
4.3. Unbiased AC Small-Signal Results
The diodes were positioned within the THT measurement fixture such that the length of the wire leads was representative of the lengths that would be necessary when implemented within the junction box of a PV module. This was critical for accurate modelling, as, if the leads were shortened, then the effect of the series resistance, , and inductance, , that is due to the wire leads would have been omitted.
Initially, a frequency range of 1
to 50
was chosen, with 401 logarithmically spaced measurement points. The attenuation of both receivers was set to 0, and the receiver bandwidth was set to 10
. This configuration achieved good measurement accuracy (i.e., an appropriate signal-to-noise ratio) and sweep time. An Open-Short-Load calibration was performed using the calibration kit provided with the B-WIC fixture. This allowed the parasitic elements of the measurement setup to be compensated for. This initial sweep allowed for the resonant points of each diode to be identified. The measurement range was then adjusted to 1
to 50
, again with 401 logarithmically spaced measurement points, as this allowed the regions before and after the resonant point to be examined with greater resolution. As the resonant point identified for each diode occurred between 10
and 30
, further measurements were conducted within this frequency range in order to more accurately determine the value of
for each diode. For these further measurements, the Bode 100 was recalibrated, this time using 401 linearly spaced points. Using the curve_fit function, with the magnitude of Equation (
6) (the impedance equation for the AC small-signal sub-model) as the objective function, parameters for
and
were obtained. In this curve fitting procedure, the values from
Table 7 were used for parameter
. As this small-signal measurement was conducted without a DC bias, the assumption that
(from
Section 4.1) was made.
The
term (from Equation (
6)) was calculated for each diode at its corresponding resonant point, and these values were then subtracted from the corresponding measured real impedance values. This produced the measured values for parameter
for each diode. The gold contact resistance of
, mentioned earlier, was also subtracted in order to correct the measured values of
for each diode. The aforementioned parameters are listed in
Table 9.
LTspice simulations were performed for each diode using the AC small-signal sub-model, with the parameters from
Table 9.
Figure 25 demonstrates good agreement, in both magnitude and phase, of the measured and simulated impedances using a logarithmically spaced frequency axis between 1
and 50
.
Figure 26 further exhibits this agreement in more detail about the resonant point using a linear frequency axis between 10
and 30
.
These plots clearly demonstrate the resonant point between and the parallel combination of and . dominates below this frequency, and dominates above this frequency. It should be noted that the curve fitting procedure was crucial in order to obtain accurate values for , as no region where the magnitude of the impedance of the diodes was exclusively influenced by the inductance was present. For this, a frequency higher than 50 would have been required—outside of the capabilities of the Bode 100.
Now that the parameters for , , , , and had been determined, the only remaining unknown parameter was the voltage-dependent capacitance, .
4.4. Biased Measurements—Capacitance Measurement
The impedance of each diode was measured at 401 logarithmically spaced points between 100 and 50 , for reverse bias voltages between 0 and 35 (in 1 increments).
According to the diode datasheets, the junction capacitances of the three diodes were all sampled at 1
, at a DC reverse bias voltage of
, by their respective manufacturers [
9,
10,
11]. For a valid comparison, the diode impedances were sampled at the closest frequency within the measured range (
). At this frequency, the accuracy of the measurement setup was confirmed using a range of known capacitances. Due to the expected impedances spanning several orders of magnitude, and the relatively limited dynamic range of the measurement setup, this single-point approach was more appropriate than employing a curve fitting procedure spanning the full measurement range.
Following the power-to-voltage calculations in
Appendix A, the source level was set to a constant
. This was theoretically low enough so as not to cause the diodes to exhibit nonlinear operation. However, this fact was also confirmed using oscilloscope measurements at the DUT. The attenuation of both receivers was set to 0, and the receiver bandwidth was set to 30
. This configuration achieved a good balance between measurement accuracy (i.e., an appropriate signal-to-noise ratio) and sweep time.
An Open-Short-Load calibration, using the calibration kit provided with the Bode 100, allowed for the topology and parasitic elements of the measurement setup to be considered and compensated for, respectively. In order to further decrease the effects of measurement noise, the measured results were then passed through a convolution-based digital filter. The Savitsky–Golay filter (from the SciPy open-source Python library [
28]), with a window size of 51 and a polynomial order of 2, was then applied in order to adequately smooth the measured data without distortion of the signal tendency.
Between 100
and 10
, the magnitude of the measured impedances decreased linearly with increasing frequency, while the phase was also relatively constant, near
. This is shown for the unbiased case in
Figure 27. In
Figure 27, one can also see that the phase is nearest 90
between 1
and 2
, further indicating that the choice of frequency at which the impedances were sampled was most appropriate as it (1) agreed with the choice of frequency used by the diode manufacturers, and (2) was nearest the point where the influence of the capacitance was dominant. This indicated that the capacitance
had the greatest influence over the DUT impedance in this region (i.e., the influence of the inductance
was negligible for these frequencies).
Prior to curve fitting of the voltage-dependent capacitance, the voltage drop over the 100
resistor in the DC Bias Tree circuit was compensated for. The resulting data took the form of Equation (
15), where
,
, and
are constants. Equation (
15) was then fit to the measured data for the three diodes, and the resulting parameters for each diode are listed in
Table 10. The measured and fit capacitance–voltage curves are shown in
Figure 28, which illustrates the divergence between measured and datasheet parameters, as well as the differences between the fit and the measured capacitances. The best fit achieved was for the 10SQ045 diode, which had a mean absolute relative error of 0.2177%, followed by that of the 15SQ040 diode at 0.2733%, and finally the VSB2045 diode at 6.6779% (calculated over the full data range). Noteworthy is the difference between the measured data and the datasheet parameters. The 10SQ045 and 15SQ040 datasheet parameters indicate smaller capacitances than that which was measured; however, good agreement was achieved for the VSB2045 diode. A possible explanation for this is the fact that the diode datasheets are written for all the diodes in a series, as opposed to one diode model in particular. Therefore, an average capacitance is expressed by the manufacturer, which is not always adequately representative. This highlights the importance of accurate measurement-based modelling in simulations. Also noteworthy is the good agreement between the zero-bias capacitance measurements obtained using the THT fixture in
Table 9 of
Section 3.2.1 and the capacitance measurements shown for a reverse bias of 0
shown in
Figure 28. This agreement between separate test setups served as an additional validation step.
As initially introduced in
Section 2.3.1, a capacitance measured using a small-signal based method describes a
local capacitance,
, which is therefore only appropriate for small-signal-based modelling. Equation (
14), however, allows for the conversion of a local capacitance to a
total capacitance,
, which is appropriate for use with large-signal transient stimuli [
26]. Thus, Equations (
14) and (
15) were combined, producing Equation (
16). Equation (
16) was then implemented in LTspice using the behavioural source-based method, as described in
Section 2.3.1.
It was Equation (
16) which was then input into LTspice as the governing equation for the dependent voltage source, C_Rep, in
Figure 12.
At this point, all the required parameters for the proposed circuital model, capable of both forward and reverse bias, as well as both small-signal and large-signal dynamic operation, had been determined. Thus, the full circuital model could be constructed in LTspice.
4.5. Full Model Demonstrations
Operation of the LTspice implementation of the full circuital model, shown previously in
Figure 12, is demonstrated in this section—firstly, by application of small-signal stimuli, and secondly, by application of large-signal transient stimuli.
4.6. Small Signal
Small-signal operation of the full circuital model was demonstrated by applying a sinusoidal signal with an amplitude of 1
. In this demonstration, the parameters presented for the 10SQ045 diode were used.
Figure 29 shows a time domain representation of the voltage over and current through the diode with the application of a 1
signal. As expected, the current through the diode was a sinusoidal signal (i.e., no rectification of the applied signal had occurred). The simulated current had a peak value of
, with a phase angle (relative to the voltage waveform) of +90 deg. This produced an impedance of
, which aligned with the measured and simulated small-signal impedance plot for the 10SQ045 diode seen previously in
Figure 25 at 1
.
The frequency of the applied signal was then increased to 50
and the simulation was repeated. The simulated voltage and current curves are shown in
Figure 30. Again, no rectification was observable, confirming small-signal operation. In this instance, the current through the diode had a peak value of
, with a phase angle (relative to the voltage waveform) of +90
. This produced an impedance of
; this also aligned with the impedance plot for the 10SQ045 diode seen in
Figure 25 at 50
.
5. Large Signal
A model of a pulse generating circuit, similar to the desktop-scale setup in [
13], was connected to the LTspice implementation of the full circuital model to demonstrate the response of the model to large-signal stimuli. This simulation setup is shown in
Figure 31. In this setup, capacitor C1 is charged to an initial voltage of 250
, and has an equivalent series resistance represented by resistor R3. Switch S1 closes at time 10
, applying a pulse to the pulse-shaping circuit composed of resistors R1, R2, and R4, and inductor L1, and then to the full circuital model of the bypass diode.
Figure 32 shows the simulated response of the full circuital diode model to the application of the pulse in the forward bias. As expected, the diode becomes forward-biased, conducting a large current pulse while exhibiting a small voltage drop.
Figure 33 shows the simulated response of the full circuital diode model to the application of the pulse in the reverse bias. In this bias, a sharp voltage rise initially occurs, followed by a plateau at the breakdown voltage. Upon breakdown, a large current pulse then flows through the diode, while the voltage remains relatively stable. Subsequent to the conclusion of the current pulse, the voltage then gradually reduces.
The vertical axes for the forward and reverse bias plots above were purposefully fixed in order to clearly illustrate how the behaviour of the full circuital model differs depending on the applied bias. Should a linearised model be used for this purpose, as in [
21], then the voltage and current waveforms would be identical for either bias. This would be an oversimplification of the behaviour of a device with strongly nonlinear characteristics. Thus, the implementation of an appropriate model is pivotal.
6. Discussion
This article presented a full circuital model, described in
Section 2, as well as the required model parameters, in order to facilitate accurate SPICE-based modelling of three different Schottky diodes under dynamic conditions.
This model overcame the obvious limitations of previous studies involving simulations of large-signal transient surges in PV plants, where the bypass diodes were omitted or where their operation was overly simplified [
13,
14,
15,
16,
22]. This model also overcame more subtle implementation-related limitations, such as the application of large-signal stimuli to small-signal models, by being constructed in such a way as to allow for the correct simulation of large-signal transients. For this, the correct application of the voltage-dependent capacitance,
, was crucial. In addition, with the inclusion of the parallel leakage resistance,
, and the reverse diode,
, the presented model greatly improved the reverse bias current–voltage behaviour over that provided by the standard SPICE large-signal diode model. The resulting suitability to both small-signal and large-signal stimuli was demonstrated in
Section 4.5.
It was important to the authors that the resulting model be SPICE-compatible, for two reasons: (1) as many SPICE-based simulators are open-source and/or free-to-use, this allows many researchers the chance to implement the proposed model in their research (without needing to purchase additional software licences), and (2) this ensured the greatest possibility of cross-compatibility with other simulation packages, which are focussed on other domains (such as CST Studio Suite 2021 by Dassault Systemes, an electromagnetic simulation package [
33]). Knowing this, the model is bound by the limitations of SPICE, such as the inability to vary the component temperature throughout the simulation in a manner that is bidirectionally coupled to the electrical parameters. A MATLAB Simulink [
34] model, such as in [
4], based on first-principle operation, could overcome this limitation, but this would conflict with the accessibility and cross-compatibility intentions of the authors for this article.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
































