
Multi-Objective Dynamic Economic Emission Dispatch with Electric Vehicle–Wind Power Interaction Based on a Self-Adaptive Multiple-Learning Harmony-Search Algorithm

 , ,
, ,
Abstract
:1. Introduction
2. Modeling of
2.1. Wind Power Modeling
2.2. EV Dispatch Model
2.3. Interaction between Wind Power and EVs
2.4. Objective Functions
2.5. System Constraints
3. Self-Adaptive Multi-Learning Harmony-Search Algorithm and Its Implementation in the
3.1. The Basic HSA
| Algorithm 1. The procedure of improvisation in HSA. |
| 1. for |
| 2. if |
| 3. |
| 4. if |
| 5. |
| 6. end if |
| 7. else |
| 8. |
| 9. end if |
| 10.end for |
3.2. The Proposed SAMLHS Algorithm
3.2.1. Self-Adaptive Parameter Adjustment
3.2.2. Multiple Learning
3.3. Implementation of SAMLHS in Solving the
| Algorithm 2. The implementation of SAMLHS in solving the . |
| 1 Initialize population size ( ), maximum number of function evaluations ( ), and other parameters. Set ; |
| 2 Generate the initial population randomly; |
| 3 Evaluate the fitness value of each individual by (10) and (14), and then set ; |
| 4 Sort POP based on fast nondominated sorting and crowding distance sorting; |
| 5 while ( ) do |
| 6 Update HMCR and PAR according to (28) and (29); |
| 7 for |
| 8 if |
| 9 Update by (30); |
| 10 if |
| 11 ; |
| 12 end if |
| 13 else |
| 14 Update by (31); |
| 15 end if |
| 16 Evaluate and Store into POP; |
| 17 ; |
| 18 end for |
| 19 Sort POP based on fast nondominated sorting and crowding distance sorting; |
| 20 Reserve Only the best NP individuals into POP; |
| 21 end while; |
| 22 Return POP; |
4. Numerical Experiments
4.1. Problem Description and Parameter Settings
4.2. Performance Comparison
5. Experimental Results of Solving the Model
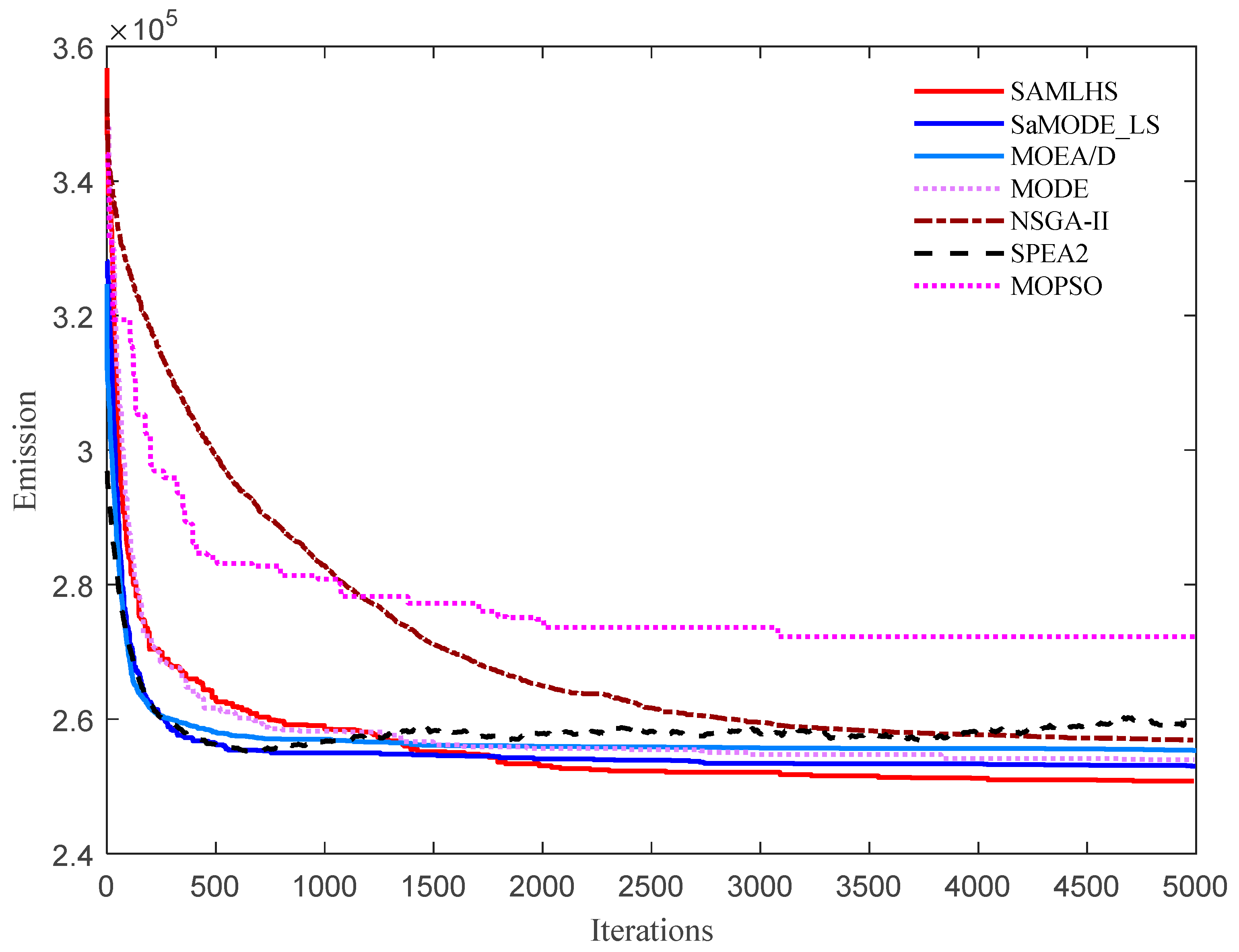
5.1. Verifying the Effectiveness of the Proposed SAMLHS Algorithm
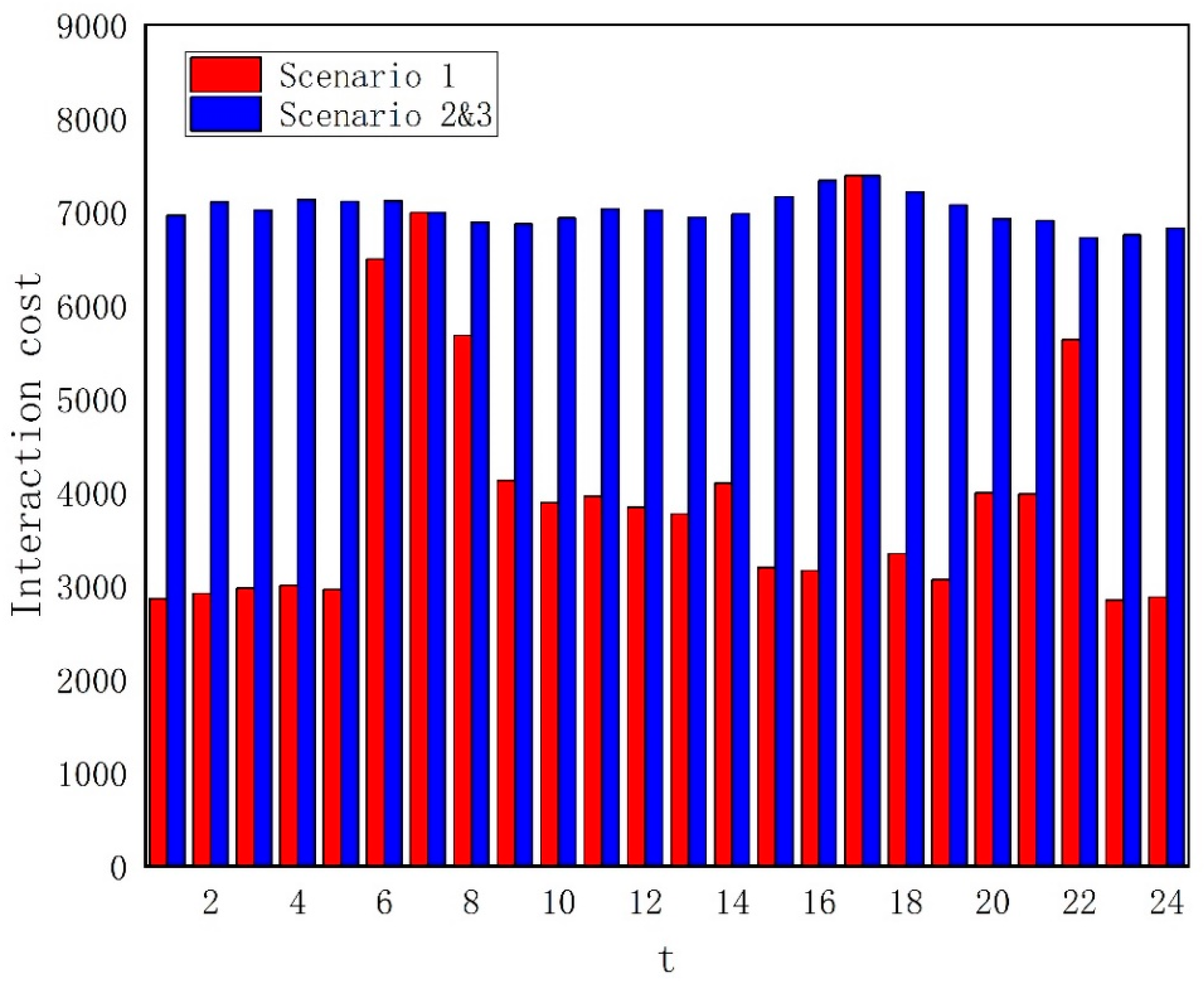
5.2. Verifying the Proposed Model
5.3. Different Confidence Levels
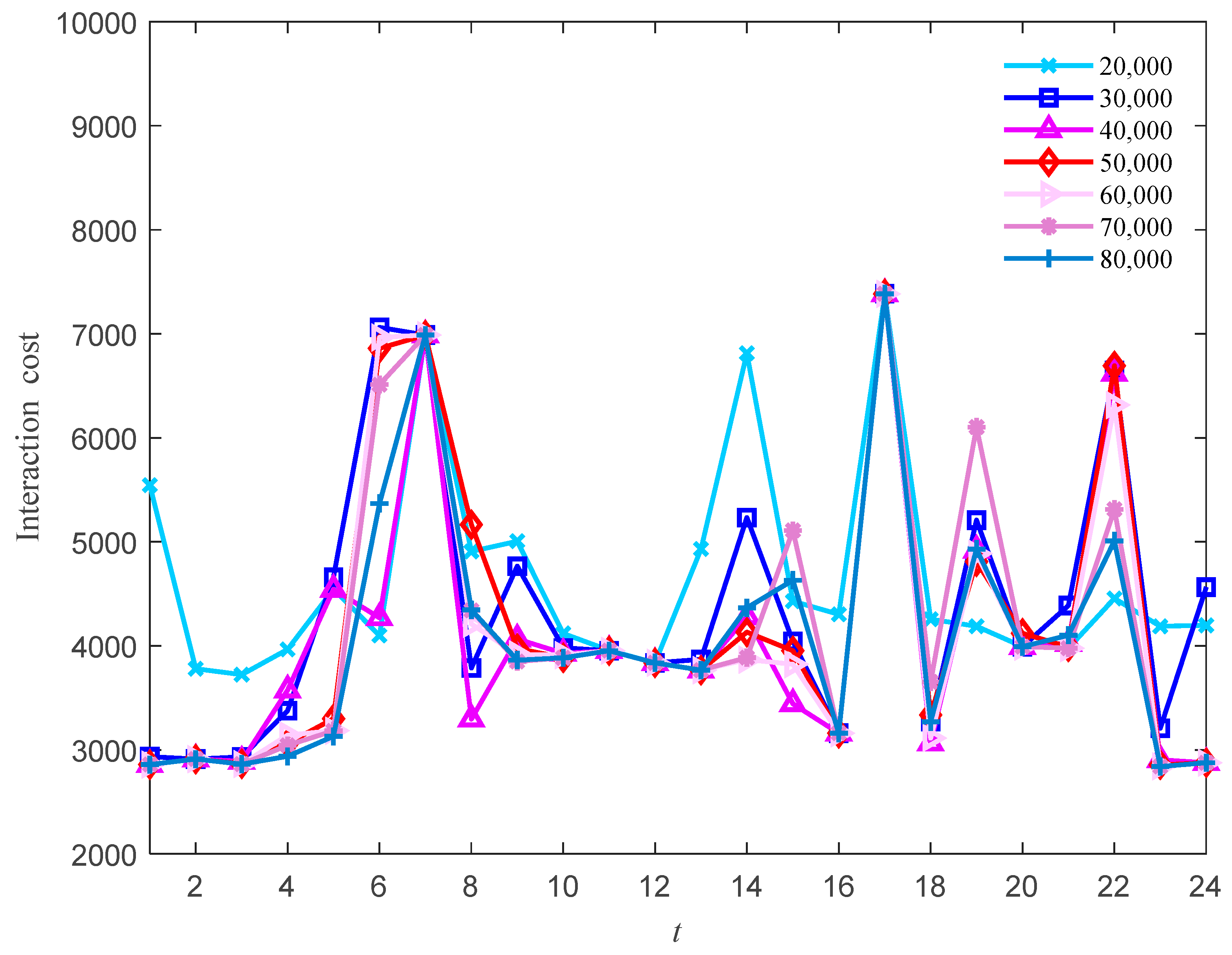
5.4. Different Scales of EVs and Wind Power
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yan, L.; Qu, B.; Zhu, Y.; Qiao, B.; Suganthan, P.N. Dynamic economic emission dispatch based on multi-objective pigeon-inspired optimization with double disturbance. Sci. China Inf. Sci. 2019, 62, 70210–70211. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Liu, K.; Liao, X.; Qin, L.; An, X. Stochastic dynamic economic emission dispatch with unit commitment problem considering wind power integration. Int. Trans. Electr. Energy 2018, 28, e2472. [Google Scholar] [CrossRef]
- Chen, J.J.; Qi, B.X.; Peng, K.; Li, Y.; Zhao, Y.L. Conditional value-at-credibility for random fuzzy wind power in demand response integrated multi-period economic emission dispatch. Appl. Energy 2020, 261, 114337. [Google Scholar] [CrossRef]
- Liu, Z.; Li, L.; Liu, Y.; Liu, J.; Li, H.; Shen, Q. Dynamic economic emission dispatch considering renewable energy generation: A novel multi-objective optimization approach. Energy 2021, 235, 121407. [Google Scholar] [CrossRef]
- Liu, X.; Xu, W. Minimum Emission Dispatch Constrained by Stochastic Wind Power Availability and Cost. IEEE Trans. Power Syst. 2010, 25, 1705–1713. [Google Scholar]
- Zhang, Z.; Sun, Y.; Gao, D.W.; Lin, J.; Cheng, L. A Versatile Probability Distribution Model for Wind Power Forecast Errors and Its Application in Economic Dispatch. IEEE Trans. Power Syst. 2013, 28, 3114–3125. [Google Scholar] [CrossRef]
- Hu, F.; Hughes, K.J.; Ingham, D.B.; Ma, L.; Pourkashanian, M. Dynamic economic and emission dispatch model considering wind power under Energy Market Reform: A case study. Int. J. Electr. Power 2019, 110, 184–196. [Google Scholar] [CrossRef] [Green Version]
- Aghaei, J.; Niknam, T.; Azizipanah-Abarghooee, R.; Arroyo, J.M. Scenario-based dynamic economic emission dispatch considering load and wind power uncertainties. Int. J. Electr. Power 2013, 47, 351–367. [Google Scholar] [CrossRef]
- Jangir, P.; Jangir, N. A new Non-Dominated Sorting Grey Wolf Optimizer (NS-GWO) algorithm: Development and application to solve engineering designs and economic constrained emission dispatch problem with integration of wind power. Eng. Appl. Artif. Intel. 2018, 72, 449–467. [Google Scholar] [CrossRef]
- Chen, M.; Zeng, G.; Lu, K. Constrained multi-objective population extremal optimization based economic-emission dispatch incorporating renewable energy resources. Renew Energy 2019, 143, 277–294. [Google Scholar] [CrossRef]
- Hagh, M.T.; Kalajahi, S.M.S.; Ghorbani, N. Solution to economic emission dispatch problem including wind farms using Exchange Market Algorithm Method. Appl. Soft Comput. 2020, 88, 106044. [Google Scholar] [CrossRef]
- Jin, J.; Zhou, D.; Zhou, P.; Miao, Z. Environmental/economic power dispatch with wind power. Renew Energy 2014, 71, 234–242. [Google Scholar] [CrossRef]
- Zakariazadeh, A.; Jadid, S.; Siano, P. Multi-objective scheduling of electric vehicles in smart distribution system. Energ. Convers Manag. 2014, 79, 43–53. [Google Scholar] [CrossRef]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The Impact of Charging Plug-In Hybrid Electric Vehicles on a Residential Distribution Grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar] [CrossRef] [Green Version]
- Wu, T.; Yang, Q.; Bao, Z.; Yan, W. Coordinated Energy Dispatching in Microgrid With Wind Power Generation and Plug-in Electric Vehicles. IEEE Trans. Smart Grid. 2013, 4, 1453–1463. [Google Scholar] [CrossRef]
- Gholami, A.; Ansari, J.; Jamei, M.; Kazemi, A. Environmental/economic dispatch incorporating renewable energy sources and plug-in vehicles. IET Gener. Transm. Distrib. 2014, 8, 2183–2198. [Google Scholar] [CrossRef]
- Zhao, Y.; Noori, M.; Tatari, O. Vehicle to Grid regulation services of electric delivery trucks: Economic and environmental benefit analysis. Appl. Energy 2016, 170, 161–175. [Google Scholar] [CrossRef]
- De Los Rios, A.; Goentzel, J.; Nordstrom, K.E.; Siegert, C.W. Economic Analysis of Vehicle-to-Grid (V2G)-Enabled Fleets Participating in the Regulation Service Market. In Proceedings of the 2012 IEEE PES Innovative Smart Grid Technologies (ISGT), Washington, DC, USA, 16–20 January 2012; pp. 1–8. [Google Scholar]
- Han, S.; Han, S. Economic Feasibility of V2G Frequency Regulation in Consideration of Battery Wear. Energies 2013, 6, 748–765. [Google Scholar] [CrossRef] [Green Version]
- Andersson, S.L.; Elofsson, A.K.; Galus, M.D.; Göransson, L.; Karlsson, S.; Johnsson, F.; Andersson, G. Plug-in hybrid electric vehicles as regulating power providers: Case studies of Sweden and Germany. Energy Policy 2010, 38, 2751–2762. [Google Scholar] [CrossRef]
- Qiao, B.; Liu, J. Dynamic Economic Dispatch with Electric Vehicles Considering Battery Wear Cost Using a Particle Swarm Optimization Algorithm. In Proceedings of the 2021 International Conference on Power System Technology (POWERCON), Haikou, China, 8–9 December 2021; pp. 807–813. [Google Scholar]
- Qiao, B.; Liu, J. Using Multi-Objective Particle Swarm Optimization to Solve Dynamic Economic Emission Dispatch Considering Wind Power and Electric Vehicles; Springer: Singapore, 2020; pp. 65–76. [Google Scholar]
- Qu, B.; Qiao, B.; Zhu, Y.; Liang, J.; Wang, L. Dynamic Power Dispatch Considering Electric Vehicles and Wind Power Using Decomposition Based Multi-Objective Evolutionary Algorithm. Energies 2017, 10, 1991. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Le, J.; Liao, X.; Zheng, F.; Liu, K.; An, X. Multi-objective hydro-thermal-wind coordination scheduling integrated with large-scale electric vehicles using IMOPSO. Renew Energy 2018, 128, 91–107. [Google Scholar] [CrossRef]
- Zou, Y.; Zhao, J.; Ding, D.; Miao, F.; Sobhani, B. Solving dynamic economic and emission dispatch in power system integrated electric vehicle and wind turbine using multi-objective virus colony search algorithm. Sustain. Cities Soc. 2021, 67, 102722. [Google Scholar] [CrossRef]
- Lodewijks, G.; Cao, Y.; Zhao, N.; Zhang, H. Reducing CO2 emissions of an airport baggage handling transport system using a particle swarm optimization algorithm. IEEE Access 2021, 9, 121894–121905. [Google Scholar] [CrossRef]
- Shaukat, N.; Ahmad, A.; Mohsin, B.; Khan, R.; Khan, S.U.; Khan, S.U. Multiobjective Core Reloading Pattern Optimization of PARR-1 Using Modified Genetic Algorithm Coupled with Monte Carlo Methods. Sci. Technol. Nucl. Install. 2021, 2021, 1–13. [Google Scholar] [CrossRef]
- Basu, M. Particle Swarm Optimization Based Goal-Attainment Method for Dynamic Economic Emission Dispatch. Electr. Power Compon. Syst. 2006, 34, 1015–1025. [Google Scholar] [CrossRef]
- Neshat, M.; Nezhad, M.M.; Abbasnejad, E.; Mirjalili, S.; Groppi, D.; Heydari, A.; Tjernberg, L.B.; Astiaso Garcia, D.; Alexander, B.; Shi, Q.; et al. Wind turbine power output prediction using a new hybrid neuro-evolutionary method. Energy 2021, 229, 120617. [Google Scholar] [CrossRef]
- Bilal, B.; Adjallah, K.H.; Sava, A.; Yetilmezsoy, K.; Kıyan, E. Wind power conversion system model identification using adaptive neuro-fuzzy inference systems: A case study. Energy 2022, 239, 122089. [Google Scholar] [CrossRef]
- Duca, V.E.L.A.; Fonseca, T.C.O.; Cyrino Oliveira, F.L. Joint modelling wind speed and power via Bayesian Dynamical models. Energy 2022, 247, 123431. [Google Scholar] [CrossRef]
- Qiao, B.; Liu, J. Multi-objective dynamic economic emission dispatch based on electric vehicles and wind power integrated system using differential evolution algorithm. Renew Energy 2020, 154, 316–336. [Google Scholar] [CrossRef]
- Qiao, B.; Liu, J.; Hao, X. A multi-objective differential evolution algorithm and a constraint handling mechanism based on variables proportion for dynamic economic emission dispatch problems. Appl. Soft Comput. 2021, 108, 107419. [Google Scholar] [CrossRef]
- Li, Y.; Ni, Z.; Zhao, T.; Yu, M.; Liu, Y.; Wu, L.; Zhao, Y. Coordinated Scheduling for Improving Uncertain Wind Power Adsorption in Electric Vehicles—Wind Integrated Power Systems by Multiobjective Optimization Approach. IEEE Trans. Ind. Appl. 2020, 56, 2238–2250. [Google Scholar] [CrossRef]
- Khoa, T.H.; Vasant, P.M.; Singh, M.S.B.; Dieu, V.N. Swarm based mean-variance mapping optimization for convex and non-convex economic dispatch problems. Memet. Comput. 2017, 9, 91–108. [Google Scholar] [CrossRef]
- Ingram, G.; Zhang, T. Overview of Applications and Developments in the Harmony Search Algorithm; Springer: Berlin/Heidelberg, Germany, 2009; pp. 15–37. [Google Scholar]
- Society, F.C.S. Simulation; Simulation Councils, Inc.: San Diego, CA, USA, 1963. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evolut. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Zitzler, E.; Deb, K.; Thiele, L. Comparison of multiobjective evolutionary algorithms: Empirical results. Evol. Comput. 2000, 8, 173–195. [Google Scholar] [CrossRef] [Green Version]
- Yu, K.; Wang, X.; Wang, Z. Self-adaptive multi-objective teaching-learning-based optimization and its application in ethylene cracking furnace operation optimization. Chemometr. Intell. Lab. 2015, 146, 198–210. [Google Scholar] [CrossRef]
- Qu, B.Y.; Li, G.S.; Guo, Q.Q.; Yan, L.; Chai, X.Z.; Guo, Z.Q. A Niching Multi-objective Harmony Search Algorithm for Multimodal Multi-objective Problems. In Proceedings of the 2019 IEEE Congress on Evolutionary Computation (CEC), Wellington, New Zealand, 10–13 June 2019; pp. 1267–1274. [Google Scholar]
- Price, K.; Storn, R.M.; Lampinen, J.A. Differential Evolution—A Practical Approach to Global Optimization; Springer: Berlin, Germany, 2005. [Google Scholar]
- Eiben, A.E.; Hinterding, R.; Michalewicz, Z. Parameter control in evolutionary algorithms. IEEE T Evolut. Comput. 1999, 3, 124–141. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Li, H. MOEA/D: A Multiobjective Evolutionary Algorithm Based on Decomposition. IEEE Trans. Evolut. Comput. 2007, 11, 712–731. [Google Scholar] [CrossRef]
- Huang, V.L.; Suganthan, P.N.; Liang, J.J. Comprehensive learning particle swarm optimizer for solving multiobjective optimization problems. Int. J. Intell. Syst. 2006, 21, 209–226. [Google Scholar] [CrossRef]
- Basu, M. Fuel constrained economic emission dispatch using nondominated sorting genetic algorithm-II. Energy 2014, 78, 649–664. [Google Scholar] [CrossRef]
- Abido, M.A. Multiobjective evolutionary algorithms for electric power dispatch problem. IEEE Trans. Evolut. Comput. 2006, 10, 315–329. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description |
|---|---|
| wind speed at time | |
| , | shape and scale parameters |
| , | mean value and the standard deviation of wind speed |
| rated power of the wind turbines | |
| , | rated wind speed, the cut-in wind speed and cut-out wind speed |
| , | rated power of the th EV, number of EVs |
| , | wind power curtailment and no curtailment of system |
| actual wind power from the th wind turbine at time | |
| dispatch power of the th wind turbine at time | |
| , | dispatching period, the number of units |
| , , , , | cost coefficients of the th unit |
| the active power of the th unit at time | |
| direct cost coefficient of the th wind turbine | |
| number of wind turbines | |
| , | cost coefficient for wind power curtailment and reserve |
| cost of interaction between wind power and EVs. | |
| , , , | emission coefficients of the th unit |
| , | load demand of the system at time , system loss at time |
| , | coefficients of the B-coefficient method |
| amount of power consumed during the driving of EV | |
| , | power consumption per unit time of EVs driving, driving distance. |
| , | charging and discharging efficiency, dispatch interval. |
| charging and discharging rate power | |
| and | Increase and decrease the rate of the thermal power unit at time |
| and | spinning reserve coefficients of the wind power |
| and | reserve coefficients of EVs |
| and | two pre-specified confidence levels |
| spinning reserve demand at time | |
| NP | population size |
| iteration | the number of iterations |
| FEs | function evaluations |
| penalty coefficient | |
| threshold value | |
| maximum adjustment | |
| , | rate power charging and discharging |
| SOC | remaining capacity of electric vehicle batteries |
| State | Description |
|---|---|
| charging | , = −1 and < 0, the dispatch system needs to provide power for the EVs. |
| discharging | , = 1 and > 0, the EVs can feedback power to the dispatch system. |
| No charging/discharging | , EVs do not participate in the power system dispatch. |
| Algorithm | Description |
|---|---|
| SAMLHS [41] | and were set to 0.95 and 0.06, and were set to 0.95 and 0.35. |
| SaMODE_LS [32] | Ls was set to 0.1, and were set to 0.3 and 0.9, and were set to 0.1 and 0.9, and the DE/rand/1 operation was employed. |
| MODE [42,43] | and were set to 0.5 and 0.5, and the DE/rand/1 operation was employed. |
| MOEA/D [44] | and were set to 0.6 and 0.9, respectively. Both the distribution indexes and neighborhood size were set to 20. The mutation rate was set to 1/d. |
| MOPSO [45] | the personal and global learning coefficients were set to 2.05. The inertia weight coefficient was set to 0.729. |
| NSGA-II [46] | the crossover and mutation probabilities were set to 0.9 and 0.2. The distribution indices for crossover and mutation operators were 20 and 20, respectively. |
| SPEA2 [47] | the crossover and mutation probabilities were set to 0.7 and 0.3, respectively, and the archive size was set to 100. |
| Problems | SAMLHS | SaMODE_LS | MOEA/D | MODE | NSGA-II | SPEA2 | MOPSO |
|---|---|---|---|---|---|---|---|
| ZDT1 | ) | )+ | )+ | )+ | )= | )− | )+ |
| ZDT2 | ) | )+ | )− | )+ | )+ | )− | )+ |
| ZDT3 | ) | )+ | )+ | )+ | )+ | )+ | )+ |
| ZDT4 | ) | )= | )− | )− | )+ | )= | )+ |
| ZDT6 | ) | )= | )− | )= | )+ | )= | )= |
| Sum-up | +\=\− | 3\2\0 | 2\0\3 | 3\1\1 | 4\1\0 | 1\2\2 | 4\1\0 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| NP | 100 | Battery capacity | 21.6 kWh |
| iteration | 5000 | 0.139 kWh/km | |
| FEs | 500,000 | 43 km | |
| 50 | Travel time | system | |
| 75 | |||
| 0.95 | Initial SOC | 100% | |
| T | 24 h | Minimum SOC | 20% of the battery capacity |
| 0.85 | 20% of the battery capacity | ||
| 0.3 | 10 | ||
| 100 |
| Algorithms | SAMLHS | SaMODE_LS | MODE | MOEA/D | ||||
| Best cost | 2.4294 | 2.8232 | 2.4495 | 2.7481 | 2.4400 | 2.8092 | 2.5492 | 2.7102 |
| Best emission | 2.5523 | 2.5076 | 2.5452 | 2.5298 | 2.5483 | 2.5397 | 2.6347 | 2.5535 |
| Best compromise | 2.4632 | 2.6122 | 2.4872 | 2.5939 | 2.4706 | 2.6299 | 2.5787 | 2.6048 |
| Algorithms | NSGA-II | SPEA2 | MOPSO | |||||
| Best cost | 2.5272 | 2.6050 | 2.5528 | 2.6350 | 2.5461 | 2.7863 | ||
| Best emission | 2.5354 | 2.5686 | 2.5661 | 2.5955 | 2.5988 | 2.7486 | ||
| Best compromise | 2.5319 | 2.5743 | 2.5577 | 2.6155 | 2.5747 | 2.7793 | ||
| 1 | 152.00 | 137.07 | 113.99 | 136.89 | 174.91 | 143.30 | 99.93 | 103.56 | 58.60 | 33.16 | −162.90 | 94.28 | 48.80 | 1036 |
| 2 | 155.49 | 138.16 | 121.96 | 117.50 | 208.19 | 158.73 | 120.25 | 119.02 | 78.45 | 47.56 | −199.60 | 95.92 | 51.64 | 1110 |
| 3 | 156.99 | 140.79 | 143.91 | 143.51 | 212.62 | 150.45 | 126.50 | 118.16 | 79.10 | 51.55 | −105.58 | 101.24 | 61.24 | 1258 |
| 4 | 173.87 | 170.04 | 179.96 | 191.12 | 225.68 | 159.53 | 129.05 | 118.80 | 79.35 | 53.86 | −109.59 | 101.09 | 66.75 | 1406 |
| 5 | 175.63 | 198.57 | 208.89 | 191.49 | 236.87 | 158.49 | 129.16 | 118.69 | 79.30 | 53.80 | −101.25 | 98.59 | 68.23 | 1480 |
| 6 | 169.01 | 198.66 | 250.58 | 202.35 | 243.00 | 159.95 | 130.00 | 120.00 | 79.99 | 54.92 | −7.85 | 94.89 | 67.50 | 1628 |
| 7 | 176.62 | 201.13 | 255.06 | 261.45 | 242.82 | 159.68 | 130.00 | 119.78 | 79.81 | 54.85 | 0.00 | 89.67 | 68.87 | 1702 |
| 8 | 189.59 | 250.27 | 250.70 | 243.97 | 242.70 | 159.65 | 129.87 | 119.54 | 79.29 | 54.74 | 37.80 | 78.66 | 60.78 | 1776 |
| 9 | 240.10 | 285.23 | 270.18 | 281.41 | 242.60 | 159.56 | 129.53 | 119.57 | 79.70 | 54.69 | 51.04 | 71.55 | 61.16 | 1924 |
| 10 | 253.66 | 291.01 | 313.35 | 298.32 | 242.93 | 159.78 | 129.59 | 119.79 | 79.76 | 54.86 | 72.83 | 56.01 | 49.89 | 2022 |
| 11 | 263.62 | 299.20 | 311.10 | 300.00 | 243.00 | 160.00 | 130.00 | 120.00 | 80.00 | 55.00 | 138.03 | 41.39 | 35.34 | 2106 |
| 12 | 250.77 | 289.02 | 329.82 | 299.23 | 242.82 | 159.64 | 129.48 | 119.73 | 79.53 | 54.50 | 162.74 | 59.47 | 49.75 | 2127 |
| 13 | 259.70 | 296.08 | 330.73 | 299.60 | 242.57 | 159.68 | 129.68 | 119.68 | 79.62 | 54.68 | 92.24 | 68.27 | 60.53 | 2072 |
| 14 | 236.42 | 270.45 | 274.26 | 291.28 | 242.73 | 159.67 | 129.71 | 119.70 | 79.63 | 54.68 | 48.75 | 77.95 | 61.23 | 1924 |
| 15 | 256.29 | 278.79 | 259.94 | 278.40 | 242.81 | 159.78 | 129.23 | 119.52 | 79.92 | 54.78 | −100.88 | 76.37 | 58.95 | 1776 |
| 16 | 183.88 | 221.07 | 246.82 | 258.48 | 242.59 | 159.77 | 129.55 | 119.44 | 79.82 | 54.76 | −171.44 | 73.06 | 43.80 | 1554 |
| 17 | 156.59 | 158.51 | 172.34 | 212.10 | 202.48 | 154.91 | 127.73 | 116.73 | 77.73 | 54.93 | 0.00 | 80.86 | 34.91 | 1480 |
| 18 | 175.44 | 237.40 | 244.04 | 250.07 | 242.48 | 159.71 | 129.67 | 119.52 | 79.57 | 54.47 | −90.04 | 56.65 | 30.98 | 1628 |
| 19 | 240.62 | 288.58 | 258.79 | 276.21 | 242.80 | 159.96 | 129.58 | 119.96 | 79.65 | 54.55 | −86.01 | 34.40 | 23.09 | 1776 |
| 20 | 216.42 | 283.88 | 281.15 | 299.31 | 242.52 | 159.81 | 129.40 | 119.96 | 79.53 | 54.44 | 97.05 | 36.29 | 27.76 | 1972 |
| 21 | 231.34 | 257.17 | 280.87 | 277.88 | 242.33 | 159.47 | 129.61 | 119.73 | 79.57 | 54.65 | 80.90 | 40.73 | 30.25 | 1924 |
| 22 | 167.04 | 196.41 | 217.49 | 231.88 | 236.83 | 159.53 | 129.80 | 119.69 | 79.98 | 54.75 | 13.78 | 58.69 | 37.88 | 1628 |
| 23 | 155.70 | 145.74 | 166.33 | 198.91 | 227.53 | 158.15 | 128.45 | 118.20 | 78.26 | 49.74 | −126.37 | 73.04 | 41.68 | 1332 |
| 24 | 161.55 | 151.87 | 132.79 | 171.62 | 201.94 | 145.86 | 126.27 | 114.71 | 77.50 | 53.91 | −190.65 | 81.34 | 44.70 | 1184 |
| Scenarios | Extreme Solutions | ||
|---|---|---|---|
| 1 | Best cost | ||
| Best emission | |||
| 2 | Best cost | ||
| Best emission | |||
| 3 | Best cost | ||
| Best emission | |||
| Scenarios | Best Compromise Solutions | ||||
|---|---|---|---|---|---|
| 1 | 87,019 | 100,718.432 | |||
| 2 | 87,019 | 168,338.7 | |||
| 3 | 87,019 | 168,338.7 | |||
| Extreme Solutions | |||
|---|---|---|---|
| 0.8 | Best cost | ||
| Best emission | |||
| 0.85 | Best cost | ||
| Best emission | |||
| 0.9 | Best cost | ||
| Best emission | |||
| 0.95 | Best cost | ||
| Best emission | |||
| Best Compromise Solutions | |||||
|---|---|---|---|---|---|
| 0.8 | 87019 | 103,983.54 | |||
| 0.85 | 87019 | 100,438.48 | |||
| 0.9 | 87019 | 98,723.295 | |||
| 0.95 | 87019 | 100,718.43 | |||
| EVs | Extreme Solutions | ||
|---|---|---|---|
| 20,000 | Best cost | ||
| Best emission | |||
| 30,000 | Best cost | ||
| Best emission | |||
| 40,000 | Best cost | ||
| Best emission | |||
| 50,000 | Best cost | ||
| Best emission | |||
| 60,000 | Best cost | ||
| Best emission | |||
| 70,000 | Best cost | ||
| Best emission | |||
| 80,000 | Best cost | ||
| Best emission | |||
| EVs | Best Compromise Solutions | ||||
|---|---|---|---|---|---|
| 20,000 | 87,019 | 111,574.49 | |||
| 30,000 | 87,019 | 106,148.157 | |||
| 40,000 | 87,019 | 97,532.175 | |||
| 50,000 | 87,019 | 100,718.432 | |||
| 60,000 | 87,019 | 98,733.36 | |||
| 70,000 | 87,019 | 100,274.5 | |||
| 80,000 | 87,019 | 97,256.729 | |||
| Extreme Solutions | |||
|---|---|---|---|
| 100 | Best cost | ||
| Best emission | |||
| 200 | Best cost | ||
| Best emission | |||
| 300 | Best cost | ||
| Best emission | |||
| 400 | Best cost | ||
| Best emission | |||
| 500 | Best cost | ||
| Best emission | |||
| 600 | Best cost | ||
| Best emission | |||
| 700 | Best cost | ||
| Best emission | |||
| 800 | Best cost | ||
| Best emission | |||
| Best Compromise Solutions | |||||
|---|---|---|---|---|---|
| 100 | 43,510 | 48,898.751 | |||
| 200 | 87,019 | 100,718.432 | |||
| 300 | 130,530 | 158,878.096 | |||
| 400 | 174,040 | 222,744.63 | |||
| 500 | 217,550 | 296,158.08 | |||
| 600 | 261,060 | 378,812.1 | |||
| 700 | 304,570 | 456,864.1 | |||
| 800 | 348,080 | 547,279.6 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, L.; Zhu, Z.; Kang, X.; Qu, B.; Qiao, B.; Huan, J.; Chai, X. Multi-Objective Dynamic Economic Emission Dispatch with Electric Vehicle–Wind Power Interaction Based on a Self-Adaptive Multiple-Learning Harmony-Search Algorithm. Energies 2022, 15, 4942. https://doi.org/10.3390/en15144942
Yan L, Zhu Z, Kang X, Qu B, Qiao B, Huan J, Chai X. Multi-Objective Dynamic Economic Emission Dispatch with Electric Vehicle–Wind Power Interaction Based on a Self-Adaptive Multiple-Learning Harmony-Search Algorithm. Energies. 2022; 15(14):4942. https://doi.org/10.3390/en15144942
Chicago/Turabian StyleYan, Li, Zhengyu Zhu, Xiaopeng Kang, Boyang Qu, Baihao Qiao, Jiajia Huan, and Xuzhao Chai. 2022. "Multi-Objective Dynamic Economic Emission Dispatch with Electric Vehicle–Wind Power Interaction Based on a Self-Adaptive Multiple-Learning Harmony-Search Algorithm" Energies 15, no. 14: 4942. https://doi.org/10.3390/en15144942
APA StyleYan, L., Zhu, Z., Kang, X., Qu, B., Qiao, B., Huan, J., & Chai, X. (2022). Multi-Objective Dynamic Economic Emission Dispatch with Electric Vehicle–Wind Power Interaction Based on a Self-Adaptive Multiple-Learning Harmony-Search Algorithm. Energies, 15(14), 4942. https://doi.org/10.3390/en15144942