
Improved Whale Optimization Algorithm for Transient Response, Robustness, and Stability Enhancement of an Automatic Voltage Regulator System

 ,
,  ,
,  ,
, 

Abstract
:1. Introduction
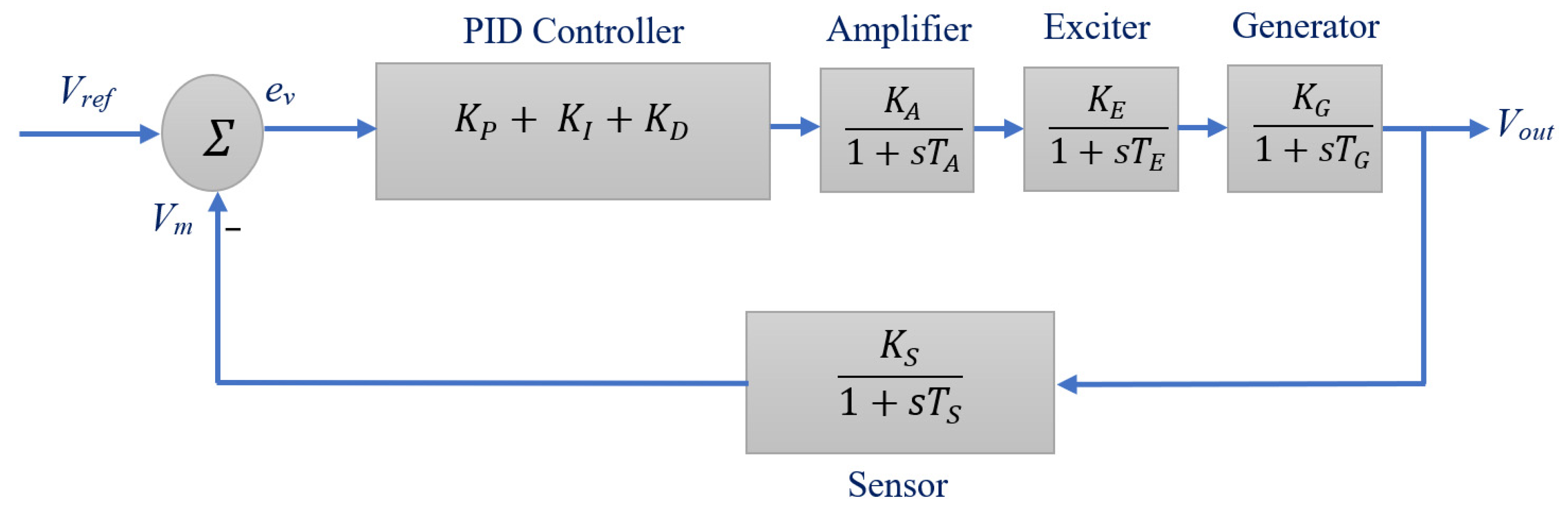
2. Mathematical Modeling of the AVR System
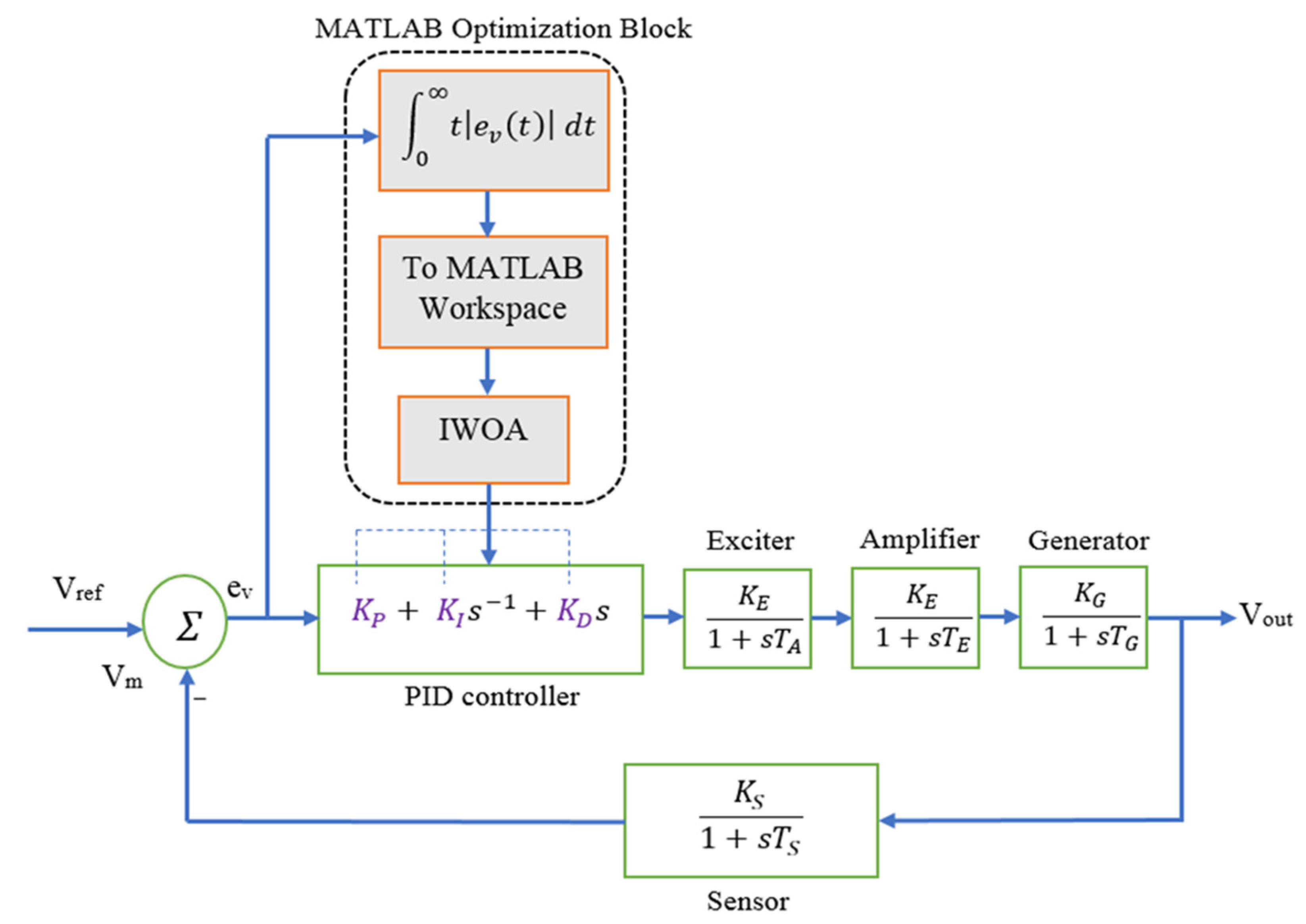
3. IWOA along with Its Implementation
3.1. Whale Optimization Algorithm
3.1.1. Finding and Encircling Prey
3.1.2. Spirally Updating Position
3.2. Improved Whale Optimization Algorithm
3.3. Methodology for Employing IWOA in Optimal Design of AVR System
4. Optimal Fitness Function
5. Results with Interpretation
- Performance evaluation of the IWOA based on convergence speed and solution quality.
- Evaluation of the dynamic response of the proposed system and its comparison with other well-known methods on identical conditions and system configurations.
- Stability assessment of the presented IWOA-based AVR system.
- Robustness assessment of the proposed system.
5.1. Performance of the Proposed IWOA in Optimal AVR Design
5.2. Dynamic Response Assessment
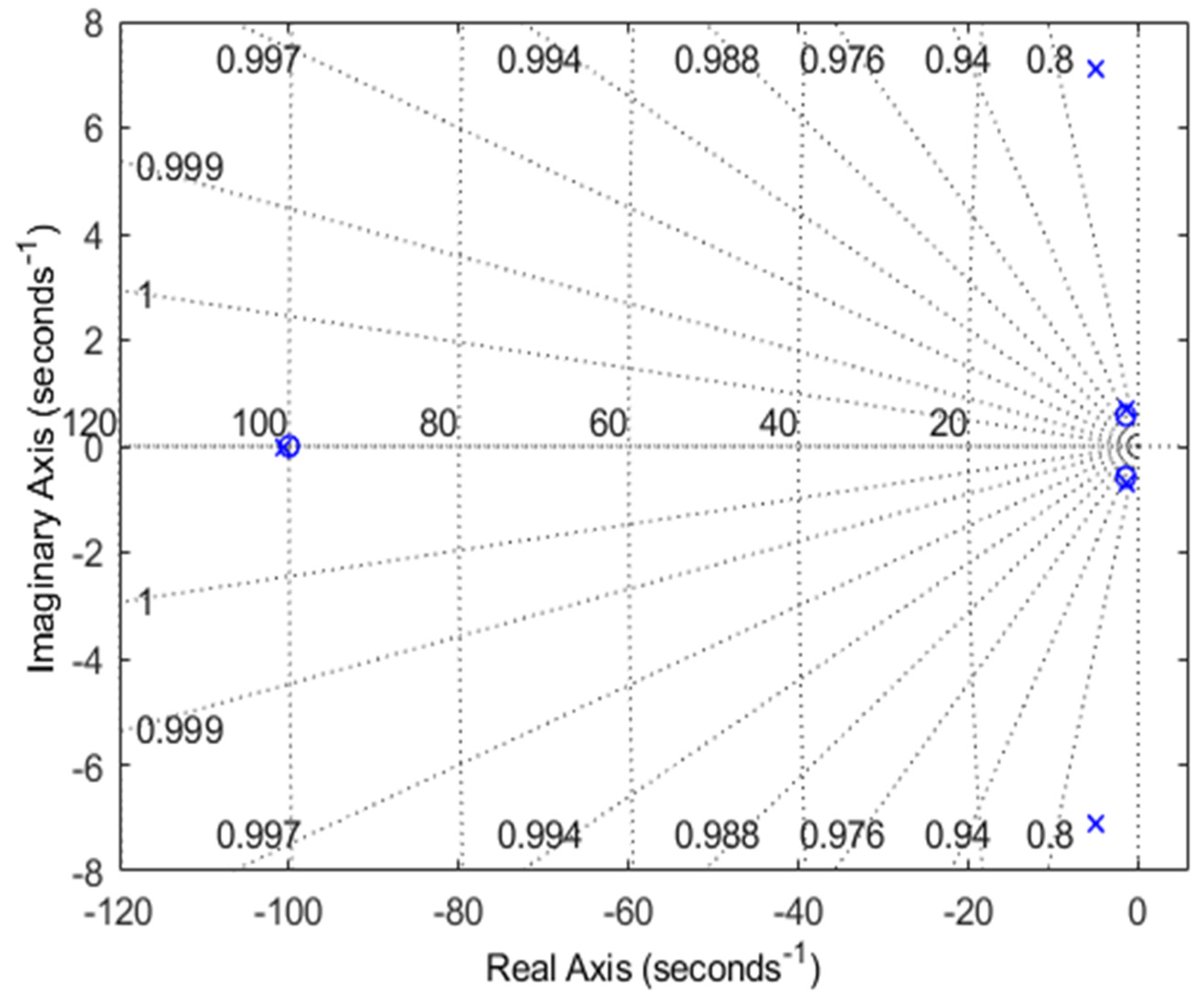
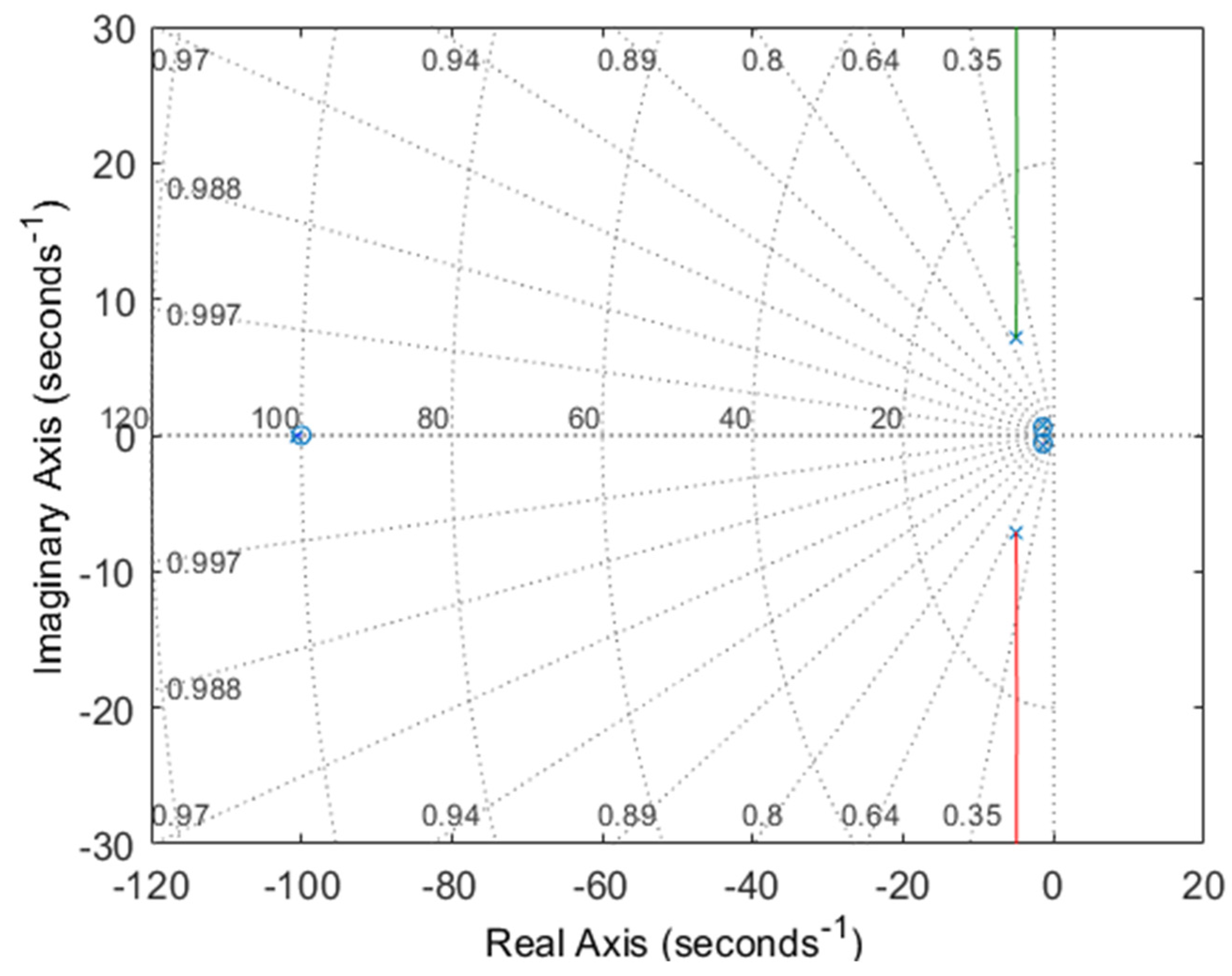
5.3. Stability Assessment
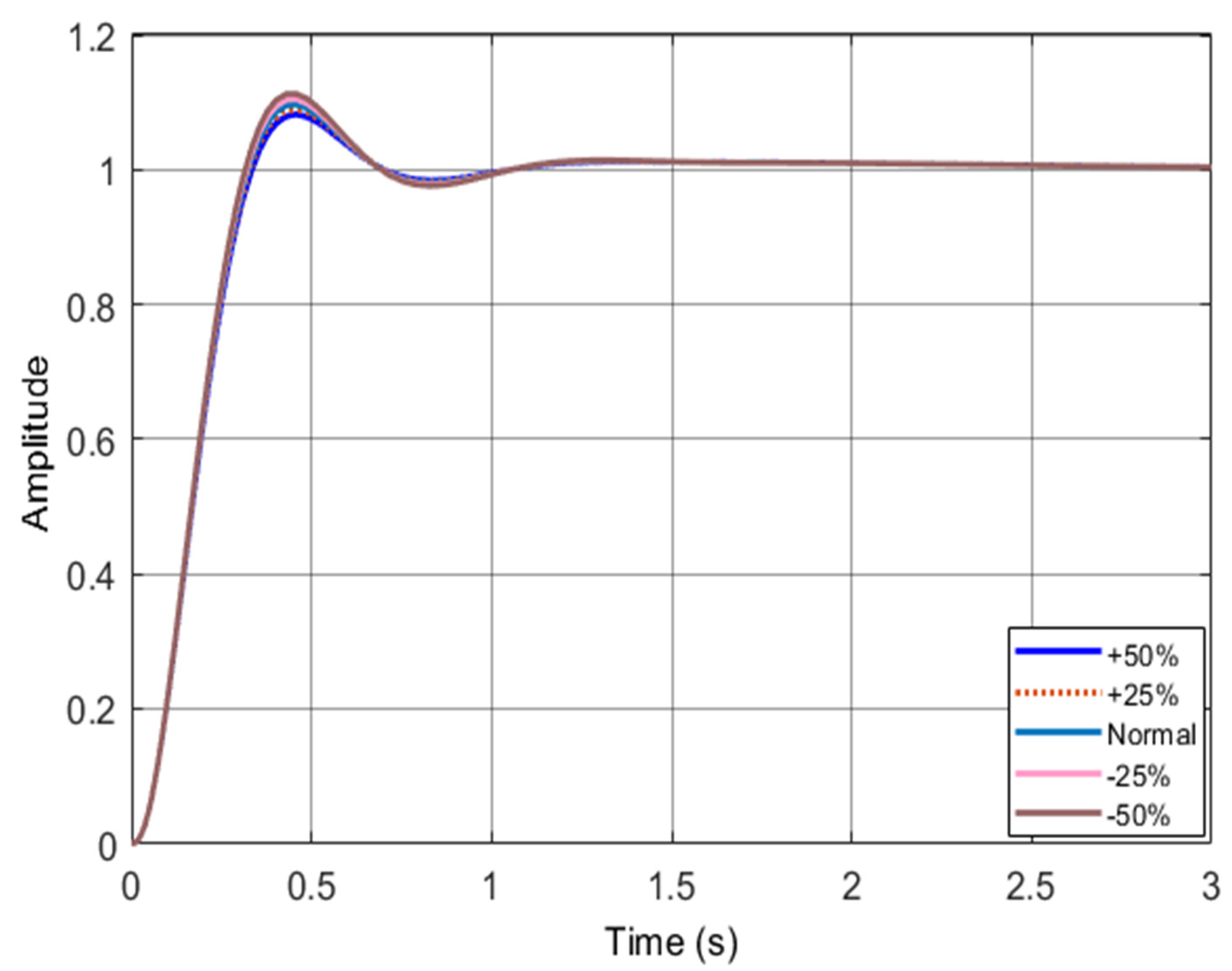
5.4. Robustness Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Larik, R.; Mustafa, M.W.; Aman, M.; Jumani, T.; Sajid, S.; Panjwani, M. An Improved Algorithm for Optimal Load Shedding in Power Systems. Energies 2018, 11, 1808. [Google Scholar] [CrossRef] [Green Version]
- Saeed, M.S.; Mustafa, M.W.; Sheikh, U.U.; Jumani, T.A.; Mirjat, N.H. Ensemble Bagged Tree Based Classification for Reducing Non-Technical Losses in Multan Electric Power Company of Pakistan. Electronics 2019, 8, 860. [Google Scholar] [CrossRef] [Green Version]
- Altbawi, S.M.A.; Mokhtar, A.S.B.; Jumani, T.A.; Khan, I.; Hamadneh, N.N.; Khan, A. Optimal Design of Fractional Order PID Controller Based Automatic Voltage Regulator System Using Gradient-Based Optimization Algorithm. J. King Saud Univ.-Eng. Sci. 2021, 34. [Google Scholar] [CrossRef]
- Ngaleu, G.M.; Tamtsia, A.Y.; Kom, C.H. Design and Robust Analysis of Internal Model Controllers for an Automatic Voltage Regulation System. Int. Rev. Electr. Eng. 2020, 15, 474. [Google Scholar] [CrossRef]
- Jumani, T.; Mustafa, M.; Rasid, M.; Mirjat, N.; Baloch, M.; Salisu, S. Optimal Power Flow Controller for Grid-Connected Microgrids Using Grasshopper Optimization Algorithm. Electronics 2019, 8, 111. [Google Scholar] [CrossRef] [Green Version]
- Jumani, T.A.; Mustafa, M.W.; Rasid, M.M.; Mirjat, N.H.; Leghari, Z.H.; Saeed, M.S. Optimal Voltage and Frequency Control of an Islanded Microgrid Using Grasshopper Optimization Algorithm. Energies 2018, 11, 3191. [Google Scholar] [CrossRef] [Green Version]
- Laghari, J.A.; Mokhlis, H.; Abu Bakar, A.H.; Mohamad, H. A Fuzzy Based Load Frequency Control for Distribution Network Connected with Mini Hydro Power Plant. J. Intell. Fuzzy Syst. 2014, 26, 1301–1310. [Google Scholar] [CrossRef]
- Jumani, T.A.; Mustafa, M.W.; Hamadneh, N.N.; Atawneh, S.H.; Rasid, M.M.; Mirjat, N.H.; Bhayo, M.A.; Khan, I. Computational Intelligence-Based Optimization Methods for Power Quality and Dynamic Response Enhancement of Ac Microgrids. Energies 2020, 13, 4063. [Google Scholar] [CrossRef]
- Sahib, M.A. A Novel Optimal PID plus Second Order Derivative Controller for AVR System. Eng. Sci. Technol. Int. J. 2015, 18, 194–206. [Google Scholar] [CrossRef] [Green Version]
- Joseph, S.B.; Dada, E.G.; Abidemi, A.; Oyewola, D.O.; Khammas, B.M. Metaheuristic Algorithms for PID Controller Parameters Tuning: Review, Approaches and Open Problems. Heliyon 2022, 8, e09399. [Google Scholar] [CrossRef]
- Dogruer, T.; Can, M.S. Design and Robustness Analysis of Fuzzy PID Controller for Automatic Voltage Regulator System Using Genetic Algorithm. Trans. Inst. Meas. Control 2022, 44, 1862–1873. [Google Scholar] [CrossRef]
- Wu, Z.; Zhuang, Y.; Zhou, S.; Xu, S.; Yu, P.; Du, J.; Luo, X.; Abbas, G. Bi-Level Planning of Multi-Functional Vehicle Charging Stations Considering Land Use Types. Energies 2020, 13, 1283. [Google Scholar] [CrossRef] [Green Version]
- Jumani, T.A.; Mustafa, M.W.; Alghamdi, A.S.; Rasid, M.M.; Alamgir, A.; Awan, A.B. Swarm Intelligence-Based Optimization Techniques for Dynamic Response and Power Quality Enhancement of AC Microgrids: A Comprehensive Review. IEEE Access 2020, 8, 75986–76001. [Google Scholar] [CrossRef]
- Selvaraj, S.; Choi, E. Swarm Intelligence Algorithms in Text Document Clustering with Various Benchmarks. Sensors 2021, 21, 3196. [Google Scholar] [CrossRef]
- Zeybekoglu, U.; Ulke Keskin, A. Investigation of Applicability of Artificial Bee Colony Algorithm on Rainfall Intensity Duration Frequency Equations. J. Ecol. Eng. 2020, 21, 27–33. [Google Scholar] [CrossRef]
- Hekimoğlu, B. Sine-Cosine Algorithm-Based Optimization for Automatic Voltage Regulator System. Trans. Inst. Meas. Control 2019, 41, 1761–1771. [Google Scholar] [CrossRef]
- Hekimoglu, B.; Ekinci, S. Grasshopper Optimization Algorithm for Automatic Voltage Regulator System. In Proceedings of the 2018 5th International Conference on Electrical and Electronic Engineering (ICEEE), Istanbul, Turkey, 3–5 May 2018; IEEE: New York, NY, USA, 2018; pp. 152–156. [Google Scholar] [CrossRef]
- Kose, E. Optimal Control of AVR System with Tree Seed Algorithm-Based PID Controller. IEEE Access 2020, 8, 89457–89467. [Google Scholar] [CrossRef]
- Mosaad, A.M.; Attia, M.A.; Abdelaziz, A.Y. Whale Optimization Algorithm to Tune PID and PIDA Controllers on AVR System. Ain Shams Eng. J. 2019, 10, 755–767. [Google Scholar] [CrossRef]
- Xiong, G.; Zhang, J.; Shi, D.; He, Y. Parameter Extraction of Solar Photovoltaic Models Using an Improved Whale Optimization Algorithm. Energy Convers. Manag. 2018, 174, 388–405. [Google Scholar] [CrossRef]
- Kenney, R.D.; Winn, H.E.; Macaulay, M.C. Cetaceans in the Great South Channel, 1979–1989: Right Whale (Eubalaena glacialis). Cont. Shelf Res. 1995, 15, 385–414. [Google Scholar] [CrossRef]
- Goldbogen, J.A.; Friedlaender, A.S.; Calambokidis, J.; McKenna, M.F.; Simon, M.; Nowacek, D.P. Integrative Approaches to the Study of Baleen Whale Diving Behavior, Feeding Performance, and Foraging Ecology. Bioscience 2013, 63, 90–100. [Google Scholar] [CrossRef] [Green Version]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Jumani, T.; Mustafa, M.; Rasid, M.M.; Anjum, W.; Ayub, S. Salp Swarm Optimization Algorithm-Based Controller for Dynamic Response and Power Quality Enhancement of an Islanded Microgrid. Processes 2019, 7, 840. [Google Scholar] [CrossRef] [Green Version]
- Memon, A.; Mustafa, M.W.B.; Jumani, T.A.; Olatunji Obalowu, M.; Malik, N. Salp Swarm Algorithm–Based Optimal Vector Control Scheme for Dynamic Response Enhancement of Brushless Double-fed Induction Generator in a Wind Energy Conversion System. Int. Trans. Electr. Energy Syst. 2021, 31, e13157. [Google Scholar] [CrossRef]
- Seborg, D.; Mellichamp, T.F.E.D. Process Dynamics & Control, 2nd ed.; Wiley India Pvt. Limited: New Delhi, India, 2006. [Google Scholar]
- Memon, A.; Wazir Bin Mustafa, M.; Anjum, W.; Ahmed, A.; Ullah, S.; Altbawi, S.M.A.; Jumani, T.A.; Khan, I.; Hamadneh, N.N. Dynamic Response and Low Voltage Ride-through Enhancement of Brushless Double-Fed Induction Generator Using Salp Swarm Optimization Algorithm. PLoS ONE 2022, 17, e0265611. [Google Scholar] [CrossRef] [PubMed]
- Khan, I.A.; Alghamdi, A.S.; Jumani, T.A.; Alamgir, A.; Awan, A.B.; Khidrani, A. Salp Swarm Optimization Algorithm-Based Fractional Order PID Controller for Dynamic Response and Stability Enhancement of an Automatic Voltage Regulator System. Electronics 2019, 8, 1472. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optimization Method | Number of Iterations to Reach the Final Solution | Minimized Fitness Function Value |
|---|---|---|
| WOA | 35 | 0.005428 |
| IWOA | 23 | 0.004996 |
| AVR Designs | Transient Response Evaluation Metrics | ||||
|---|---|---|---|---|---|
| Peak Value | %Mp | tr | tp | ts | |
| IWOA-PID (proposed) | 1.1000 | 9.56 | 0.2120 | 0.4390 | 0.6420 |
| WOA-PID | 1.1020 | 10.2038 | 0.2070 | 0.4323 | 0.9226 |
| DE-PID [15] | 1.3285 | 32.8537 | 0.1516 | 0.3655 | 2.6495 |
| PSO-PID [9] | 1.1882 | 18.8183 | 0.1493 | 0.3372 | 0.8145 |
| PSO-PID [15] | 1.3006 | 30.0634 | 0.1610 | 0.3824 | 3.3994 |
| ABC-PID [15] | 1.2501 | 25.0071 | 0.1557 | 0.3676 | 3.0939 |
| BBO-PID [16] | 1.1552 | 15.5187 | 0.1485 | 0.3165 | 1.4457 |
| GOA-PID [17] | 1.2053 | 20.5306 | 0.1300 | 0.2862 | 0.9706 |
| PSA-PID [18] | 1.1684 | 16.8449 | 0.1445 | 0.3060 | 0.8039 |
| PID Tuning Method | Closed-Loop Poles | Damping Ratio |
|---|---|---|
| IWOA-PID (proposed) | −100.77 | 1.00 |
| −5.02 + 7.09i | 0.578 | |
| −5.02 − 7.09i | 0.578 | |
| −1.35 + 0.68i | 0.893 | |
| −1.35 − 0.68i | 0.983 | |
| WOA-PID | −1.02 | 1.00 |
| −2.08 | 1.00 | |
| −4.79 + j7.33i | 0.548 | |
| −4.79 − j7.33 | 0.548 | |
| −101.00 | 1.00 | |
| DE-PID [15] | −100.91 | 1.00 |
| 3.02 + j8.19 | 0.34 | |
| −3.02 − j8.19 | 0.34 | |
| −6.29 | 1.00 | |
| −0.22 | 1.00 | |
| PSO-PID [9] | −1.02 | 1.00 |
| −1.02 | 1.00 | |
| −2.00 | 1.00 | |
| 4.64 + j9.50 | 0.439 | |
| −4.64 + j9.50 | 0.439 | |
| PSO-PID [15] | −0.21 | 1.00 |
| −6.26 | 1.00 | |
| −3.09 + j7.80 | 0.37 | |
| −3.09 − j7.80 | 0.37 | |
| −101.00 | 1.00 | |
| ABC-PID [15] | −100.98 | 1.00 |
| 3.75 + j8.40 | 0.40 | |
| −3.75 + j8.40 | 0.40 | |
| −4.74 | 1.00 | |
| −0.25 | 1.00 | |
| BBO-PID [16] | −100.00 | 1.00 |
| −4.80 + j10.2 | 0.427 | |
| −4.80 − j10.2 | 0.427 | |
| −2.1 | 1.00 | |
| −0.585 | 1.00 | |
| GOA-PID [17] | −101 | 1.00 |
| −1.18 + j1.06 | 0.74 | |
| −1.18 − j1.06 | 0.74 | |
| −4.83 + j10.9 | 0.40 | |
| −4.83 − j10.9 | 0.40 | |
| PSA-PID [18] | −1.28 + j0.146 | 0.9936 |
| −1.28 − j0.146 | 0.9936 | |
| −4.82 + j10.11 | 0.4301 | |
| −4.82 − j10.11 | 0.4301 | |
| −101.00 | 1.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Habib, S.; Abbas, G.; Jumani, T.A.; Bhutto, A.A.; Mirsaeidi, S.; Ahmed, E.M. Improved Whale Optimization Algorithm for Transient Response, Robustness, and Stability Enhancement of an Automatic Voltage Regulator System. Energies 2022, 15, 5037. https://doi.org/10.3390/en15145037
Habib S, Abbas G, Jumani TA, Bhutto AA, Mirsaeidi S, Ahmed EM. Improved Whale Optimization Algorithm for Transient Response, Robustness, and Stability Enhancement of an Automatic Voltage Regulator System. Energies. 2022; 15(14):5037. https://doi.org/10.3390/en15145037
Chicago/Turabian StyleHabib, Salman, Ghulam Abbas, Touqeer A. Jumani, Aqeel Ahmed Bhutto, Sohrab Mirsaeidi, and Emad M. Ahmed. 2022. "Improved Whale Optimization Algorithm for Transient Response, Robustness, and Stability Enhancement of an Automatic Voltage Regulator System" Energies 15, no. 14: 5037. https://doi.org/10.3390/en15145037
APA StyleHabib, S., Abbas, G., Jumani, T. A., Bhutto, A. A., Mirsaeidi, S., & Ahmed, E. M. (2022). Improved Whale Optimization Algorithm for Transient Response, Robustness, and Stability Enhancement of an Automatic Voltage Regulator System. Energies, 15(14), 5037. https://doi.org/10.3390/en15145037