
Modeling of Photovoltaic Array Based on Multi-Agent Deep Reinforcement Learning Using Residuals of I–V Characteristics

Abstract
:1. Introduction
- The design of the states and rewards of the RL agents in the modeling process are simplified for the researchers in PV engineering. The conventional methods for designing the states and rewards of the RL agents are commonly relied in the design of a virtual training environment to interact with RL agents and train them. The design of the states and rewards are according to the virtual training environment [21]. In this paper, the designed states of the RL agents are in terms of the variation of I–V characteristics in the training process, and the reward is designed according to the modeling error of I–V characteristics. For the researchers in PV engineering, the understanding of the modeling process in this paper is easier.
- The continuous state space is designed for training the RL agents by considering the continuous variation of I–V curves, which can enhance the generalization of the RL agents for estimating variation of model parameters.
2. Mathematical Model of PV Array
3. Modeling of PV Array Based on Multi-Agent Deep Reinforcement Learning
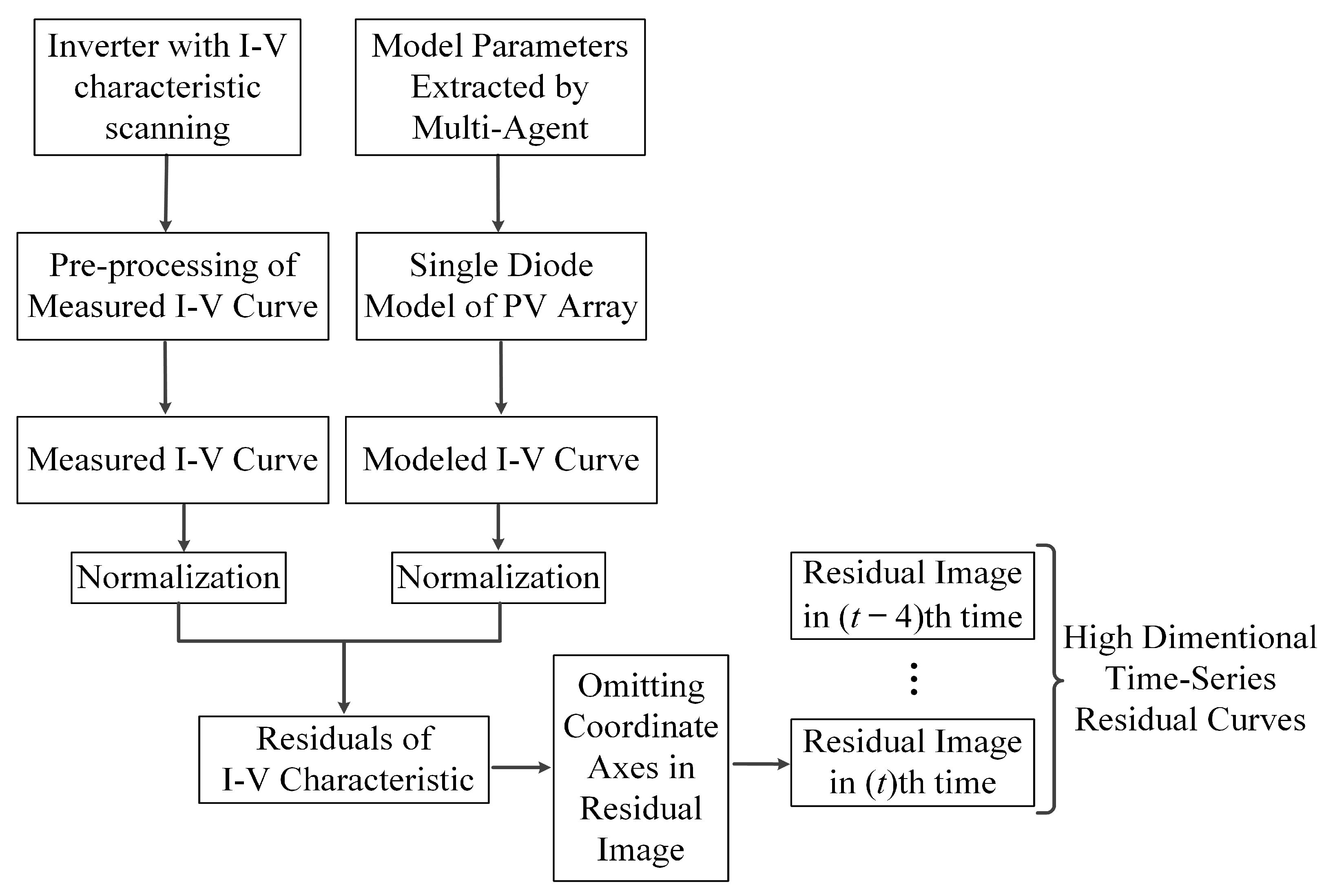
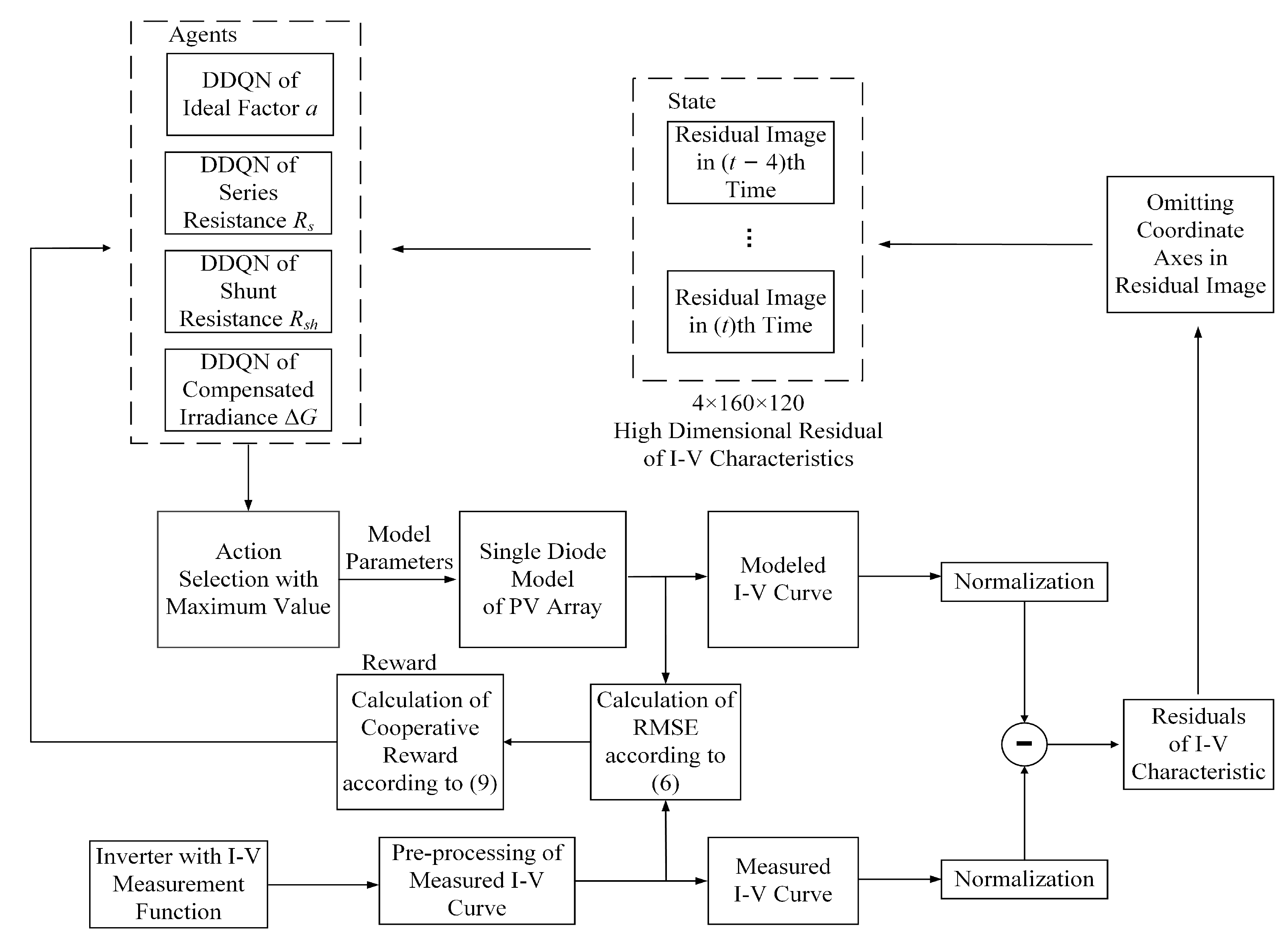
3.1. Design of State and Reward Based on Residuals of I–V Characteristics
3.2. Design of Actions Considering Amplitude Attenuation
3.3. Agents Based on Double Deep Q Network
3.4. Modeling Framework of PV Array Based on Multi-Agent Deep RL
4. Experimental Verification of Proposed Method Based on Multi-Agent Deep Reinforcement Learning
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Abbreviations | |
| ABC | artificial bee colony |
| ADAM | adaptive moment estimation |
| CA | culture algorithm |
| DDM | double-diode model |
| DDQN | double deep Q network |
| FDD | fault detection and diagnosis |
| IEA | International Energy Agency |
| MAE | mean absolute error |
| MAPE | mean absolute percentage error |
| MDP | Markov decision process |
| PSO | particle swarm optimizer |
| PV | photovoltaic |
| ReLU | rectified linear unit |
| RL | reinforcement learning |
| RMSE | root mean square error |
| SDM | single-diode model |
| STC | standard test conditions |
| Symbols | |
| photocurrent | |
| saturation current of diode | |
| a | ideal factor of diode |
| equivalent series resistance | |
| equivalent parallel resistance | |
| band gap energy | |
| maximum power | |
| voltage at maximum power point | |
| current at maximum power point | |
| open-circuit voltage | |
| short-circuit current | |
| temperature coefficient of current | |
| temperature coefficient of voltage | |
| q | electronic charge |
| k | Boltzmann constant |
| T | temperature of solar cell |
References
- IEA. Global Energy Review 2021; IEA: Paris, France, 2021; Available online: https://www.iea.org/reports/global-energy-review-2021 (accessed on 17 June 2022).
- Ahmadi, M.; Samet, H.; Ghanbari, T. A New Method for Detecting Series Arc Fault in Photovoltaic Systems Based on the Blind-Source Separation. IEEE Trans. Ind. Electron. 2020, 67, 5041–5049. [Google Scholar] [CrossRef]
- Ahmadi, M.; Samet, H.; Ghanbari, T. Series Arc Fault Detection in Photovoltaic Systems Based on Signal-to-Noise Ratio Characteristics Using Cross-Correlation Function. IEEE Trans. Ind. Inform. 2020, 16, 3198–3209. [Google Scholar] [CrossRef]
- Karmakar, B.K.; Pradhan, A.K. Detection and Classification of Faults in Solar PV Using Thevenin Equivalent Resistance. IEEE J. Photovoltaics 2020, 10, 644–654. [Google Scholar] [CrossRef]
- Ding, H.; Ding, K.; Zhang, J.; Wang, Y.; Gao, L.; Li, Y.; Chen, F.; Shao, Z.; Lai, W. Local outlier factor-based fault detection and evaluation of photovoltaic system. Sol. Energy 2018, 164, 139–148. [Google Scholar] [CrossRef]
- Lu, X.; Lin, P.; Cheng, S.; Lin, Y.; Chen, Z.; Wu, L.; Zheng, Q. Fault diagnosis for photovoltaic array based on convolutional neural network and electrical time series graph. Energy Convers. Manag. 2019, 196, 950–965. [Google Scholar] [CrossRef]
- Piliougine, M.; Guejia-Burbano, R.A.; Petrone, G.; Sánchez-Pacheco, F.J.; Mora-López, L.; Sidrach-de-Cardona, M. Parameters extraction of single diode model for degraded photovoltaic modules. Renew. Energy 2021, 164, 674–686. [Google Scholar] [CrossRef]
- Li, Y.; Ding, K.; Zhang, J.; Chen, F.; Chen, X.; Wu, J. A fault diagnosis method for photovoltaic arrays based on fault parameters identification. Renew. Energy 2019, 143, 52–63. [Google Scholar] [CrossRef]
- Wang, H.; Zhao, J.; Sun, Q.; Zhu, H. Probability modeling for PV array output interval and its application in fault diagnosis. Energy 2019, 189, 116248. [Google Scholar] [CrossRef]
- Harrou, F.; Taghezouit, B.; Sun, Y. Improved kNN-Based Monitoring Schemes for Detecting Faults in PV Systems. IEEE J. Photovoltaics 2019, 9, 811–821. [Google Scholar] [CrossRef]
- Huang, J.M.; Wai, R.J.; Yang, G.J. Design of Hybrid Artificial Bee Colony Algorithm and Semi-Supervised Extreme Learning Machine for PV Fault Diagnoses by Considering Dust Impact. IEEE Trans. Power Electron. 2020, 35, 7086–7099. [Google Scholar] [CrossRef]
- Ma, T.; Gu, W.; Shen, L.; Li, M. An improved and comprehensive mathematical model for solar photovoltaic modules under real operating conditions. Sol. Energy 2019, 184, 292–304. [Google Scholar] [CrossRef]
- Qais, M.H.; Hasanien, H.M.; Alghuwainem, S. Identification of electrical parameters for three-diode photovoltaic model using analytical and sunflower optimization algorithm. Appl. Energy 2019, 250, 109–117. [Google Scholar] [CrossRef]
- Jiao, S.; Chong, G.; Huang, C.; Hu, H.; Wang, M.; Heidari, A.A.; Chen, H.; Zhao, X. Orthogonally adapted Harris hawks optimization for parameter estimation of photovoltaic models. Energy 2020, 203, 117804. [Google Scholar] [CrossRef]
- Nunes, H.G.G.; Pombo, J.A.N.; Mariano, S.J.P.S.; Calado, M.R.A. Suitable mathematical model for the electrical characterization of different photovoltaic technologies: Experimental validation. Energy Convers. Manag. 2021, 231, 113820. [Google Scholar] [CrossRef]
- Vankadara, S.K.; Chatterjee, S.; Balachandran, P.K. An accurate analytical modeling of solar photovoltaic system considering Rs and Rsh under partial shaded condition. J. Syst. Assur. Eng. Manag. 2022. [Google Scholar] [CrossRef]
- Liu, G.; Qin, H.; Tian, R.; Tang, L.; Li, J. Non-dominated sorting culture differential evolution algorithm for multi-objective optimal operation of Wind- Solar-Hydro complementary power generation system. Glob. Energy Interconnect. 2019, 2, 368–374. [Google Scholar] [CrossRef]
- Chen, X.; Xu, B.; Mei, C.; Ding, Y.; Li, K. Teaching–learning–based artificial bee colony for solar photovoltaic parameter estimation. Appl. Energy 2018, 212, 1578–1588. [Google Scholar] [CrossRef]
- Chen, Z.; Lin, Y.; Wu, L.; Cheng, S.; Lin, P. Development of a capacitor charging based quick I–V curve tracer with automatic parameter extraction for photovoltaic arrays. Energy Convers. Manag. 2020, 226, 113521. [Google Scholar] [CrossRef]
- Chen, Z.; Chen, Y.; Wu, L.; Cheng, S.; Lin, P.; You, L. Accurate modeling of photovoltaic modules using a 1-D deep residual network based on I–V characteristics. Energy Convers. Manag. 2019, 186, 168–187. [Google Scholar] [CrossRef]
- van Hasselt, H.; Guez, A.; Silver, D. Deep Reinforcement Learning with Double Q-learning. arXiv 2015, arXiv:1509.06461v3. [Google Scholar] [CrossRef]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Graves, A.; Antonoglou, I.; Wierstra, D.; Riedmiller, M. Playing atari with deep reinforcement learning. arXiv 2013, arXiv:1312.5602. [Google Scholar]
- Zhang, J.; Liu, Y.; Li, Y.; Ding, K.; Feng, L.; Chen, X.; Chen, X.; Wu, J. A reinforcement learning based approach for online adaptive parameter extraction of photovoltaic array models. Energy Convers. Manag. 2020, 214, 112875. [Google Scholar] [CrossRef]
- Mathworks Help Center. PV Array. Available online: https://ww2.mathworks.cn/help/physmod/sps/powersys/ref/pvarray.html (accessed on 26 June 2022).
- Akbarimajd, A.; Hoertel, N.; Hussain, M.A.; Neshat, A.A.; Marhamati, M.; Bakhtoor, M.; Momeny, M. Learning-to-augment incorporated noise-robust deep CNN for detection of COVID-19 in noisy X-ray images. J. Comput. Sci. 2022, 63, 101763. [Google Scholar] [CrossRef] [PubMed]
- Pang, Y.; Hao, L.; Wang, Y. Convolutional neural network analysis of radiography images for rapid water quantification in PEM fuel cell. Appl. Energy 2022, 321, 119352. [Google Scholar] [CrossRef]
- Hong, Y.Y.; Rioflorido, C.L. A hybrid deep learning-based neural network for 24-h ahead wind power forecasting. Appl. Energy 2019, 250, 530–539. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Maximum power | |
| Voltage at maximum power point | |
| Current at maximum power point | |
| Open circuit voltage | |
| Short circuit current | |
| Temperature coefficient of current | |
| Temperature coefficient of voltage |
| Extraction Methods | 27 June 2018 | 30 September 2018 | 31 December 2018 | 31 March 2019 | 31 July 2019 |
|---|---|---|---|---|---|
| Proposed multi-agent deep RL-based method | |||||
| PSO-based method | |||||
| CA-based method | |||||
| Analytical method |
| Metrics | Proposed Multi-Agent Deep RL-Based Method | PSO-Based Method | CA-Based Method | Analytical Method |
|---|---|---|---|---|
| MAE (A) | ||||
| RMSE (A) | ||||
| MAPE (%) |
| Date | Ambient Condition | Proposed Multi-Agent Deep RL-Based Method | PSO-Based Method | CA-Based Method | Analytical Method |
|---|---|---|---|---|---|
| 28 September 2018 | 245 W/m 29.2 C | 0.36 | 0.37 | 0.25 | 0.31 |
| 405 W/m 34.5 C | 0.20 | 0.26 | 0.11 | 0.25 | |
| 611 W/m 32.3 C | 0.09 | 0.16 | 0.35 | 0.36 | |
| 805 W/m 49.7 C | 0.29 | 0.46 | 0.35 | 0.69 | |
| 17 January 2019 | 222 W/m 10.1 C | 0.04 | 0.14 | 0.14 | 0.07 |
| 452 W/m 16.9 C | 0.09 | 0.16 | 0.31 | 0.14 | |
| 600 W/m 26.3 C | 0.14 | 0.19 | 0.29 | 0.29 | |
| 1 May 2019 | 214 W/m 29.7 C | 0.06 | 0.13 | 0.04 | 0.12 |
| 402 W/m 30.5 C | 0.14 | 0.34 | 0.12 | 0.20 | |
| 602 W/m 39.5 C | 0.05 | 0.31 | 0.34 | 0.59 | |
| 772 W/m 43.9 C | 0.34 | 0.62 | 0.49 | 0.75 | |
| 22 July 2019 | 205 W/m 43.1 C | 0.09 | 0.13 | 0.11 | 0.19 |
| 403 W/m 47.1 C | 0.20 | 0.62 | 0.29 | 0.36 | |
| 607 W/m 49.7 C | 0.10 | 0.25 | 0.43 | 0.64 | |
| 807 W/m 58.0 C | 0.12 | 0.80 | 0.57 | 1.01 |
| Date | Ambient Condition | Proposed Multi-Agent Deep RL-Based Method | PSO-Based Method | CA-Based Method | Analytical Method |
|---|---|---|---|---|---|
| 28 September 2018 | 245 W/m 29.2 C | 20.52 | 44.27 | 57.24 | 58.51 |
| 405 W/m 34.5 C | 7.87 | 26.36 | 19.57 | 47.42 | |
| 611 W/m 32.3 C | 3.51 | 23.92 | 9.63 | 47.38 | |
| 805 W/m 49.7 C | 7.23 | 29.26 | 7.54 | 68.38 | |
| 17 January 2019 | 222 W/m 10.1 C | 2.94 | 25.20 | 29.27 | 5.16 |
| 452 W/m 16.9 C | 3.49 | 18.41 | 52.84 | 4.86 | |
| 600 W/m 26.3 C | 8.98 | 18.33 | 7.38 | 12.93 | |
| 1 May 2019 | 214 W/m 29.7 C | 4.04 | 20.34 | 5.33 | 23.37 |
| 402 W/m 30.5 C | 5.60 | 18.90 | 5.45 | 42.26 | |
| 602 W/m 39.5 C | 2.11 | 23.91 | 12.76 | 62.05 | |
| 772 W/m 43.9 C | 7.57 | 18.66 | 15.84 | 44.77 | |
| 22 July 2019 | 205 W/m 43.1 C | 5.52 | 20.05 | 7.82 | 42.38 |
| 403 W/m 47.1 C | 7.71 | 32.11 | 10.30 | 73.67 | |
| 607 W/m 49.7 C | 2.64 | 32.22 | 46.55 | 93.07 | |
| 807 W/m 58.0 C | 3.32 | 23.85 | 22.54 | 69.43 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Yang, Z.; Ding, K.; Feng, L.; Hamelmann, F.; Chen, X.; Liu, Y.; Chen, L. Modeling of Photovoltaic Array Based on Multi-Agent Deep Reinforcement Learning Using Residuals of I–V Characteristics. Energies 2022, 15, 6567. https://doi.org/10.3390/en15186567
Zhang J, Yang Z, Ding K, Feng L, Hamelmann F, Chen X, Liu Y, Chen L. Modeling of Photovoltaic Array Based on Multi-Agent Deep Reinforcement Learning Using Residuals of I–V Characteristics. Energies. 2022; 15(18):6567. https://doi.org/10.3390/en15186567
Chicago/Turabian StyleZhang, Jingwei, Zenan Yang, Kun Ding, Li Feng, Frank Hamelmann, Xihui Chen, Yongjie Liu, and Ling Chen. 2022. "Modeling of Photovoltaic Array Based on Multi-Agent Deep Reinforcement Learning Using Residuals of I–V Characteristics" Energies 15, no. 18: 6567. https://doi.org/10.3390/en15186567
APA StyleZhang, J., Yang, Z., Ding, K., Feng, L., Hamelmann, F., Chen, X., Liu, Y., & Chen, L. (2022). Modeling of Photovoltaic Array Based on Multi-Agent Deep Reinforcement Learning Using Residuals of I–V Characteristics. Energies, 15(18), 6567. https://doi.org/10.3390/en15186567