
A Review on Optimization of Active Power Filter Placement and Sizing Methods




Abstract
:1. Introduction
- transformers and electrical machines, in which the current distortion is caused by the nonlinearity of the magnetization characteristics of the materials used for their construction;
- arc furnaces and other devices in which an electric arc occurs, such as discharge lamps and welding machines;
- power electronics and electronic loads with switching elements.
- power network overloads caused by an increase in the root mean square (RMS) value of the current, and thus an increase in losses in resistance elements;
- overload of neutral wire, caused by the summation of third-order harmonics, caused by single-phase loads;
- overload, vibration, and premature ageing of generators, transformers, and motors;
- overloads and premature ageing of capacitor banks intended for power factor correction;
- disruptions in the operation of sensitive loads;
- premature ageing of insulation;
- dangerous failures resulting from the occurrence of resonance phenomena;
- disruptions in communication networks and telephone lines;
- unjustified triggering of protection devices.
2. Methods of Harmonic Reduction
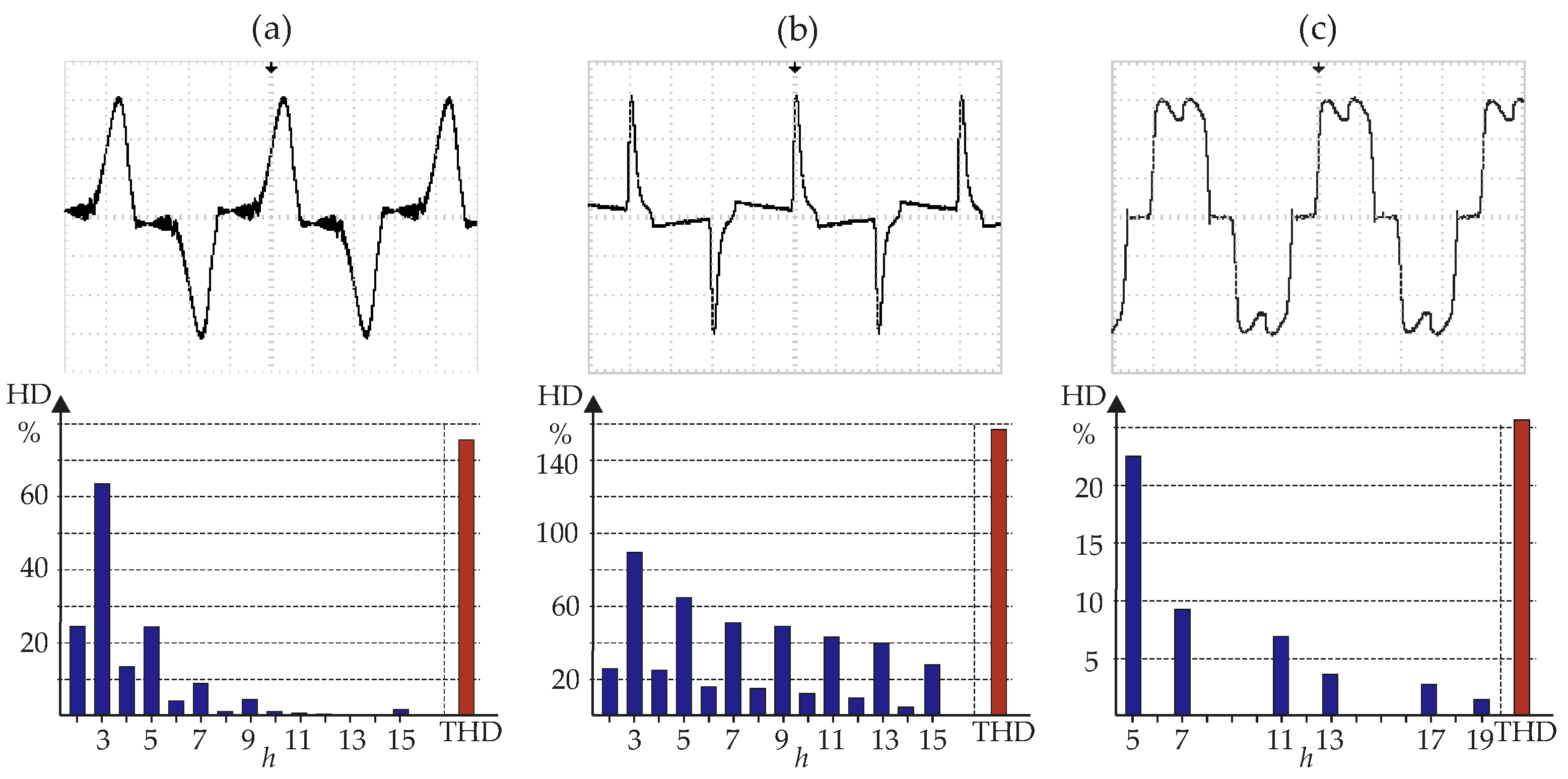
- Individual harmonic component:
- Total harmonic distortion factor (THD) for voltage (THDV) and current (THDI):
- changes in the amplitude of the supply voltage, due to commutation of high power loads (such changes are usually random);
- asynchronous switching of power electronic components in converters.
- Total demand distortion (TDD) coefficient:
- Motor load losses (MLL), which express the more important effect of lower, compared to higher, harmonics on electrical motor-harmonics, which have detrimental effects on electrical motors, such as proliferation losses, increased temperature, and ageing process [9]:
- Telephone interference factor (TIF) of voltage and current waveforms in electric supply circuits, which is the ratio of the square root of the sum of the squares of the weighted root mean square values of all sine wave components (including alternating current waves, both fundamental and harmonics) to the root mean square value (unweighted) of the entire wave:
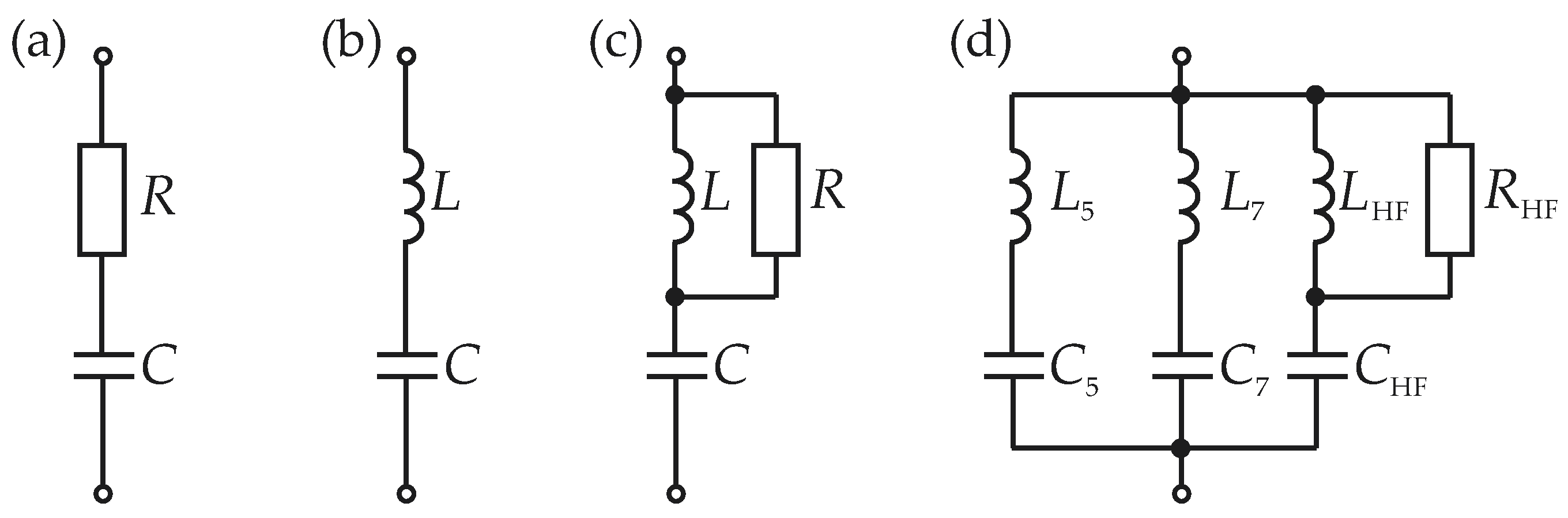
- dependence of filtering properties on network parameters;
- limited filtration possibilities, due to the finite quality of the chokes;
- possible resonance between the network and the filter;
- dependence of filtering properties on changes in the value of filter components (e.g., due to ageing);
- large size and weight.
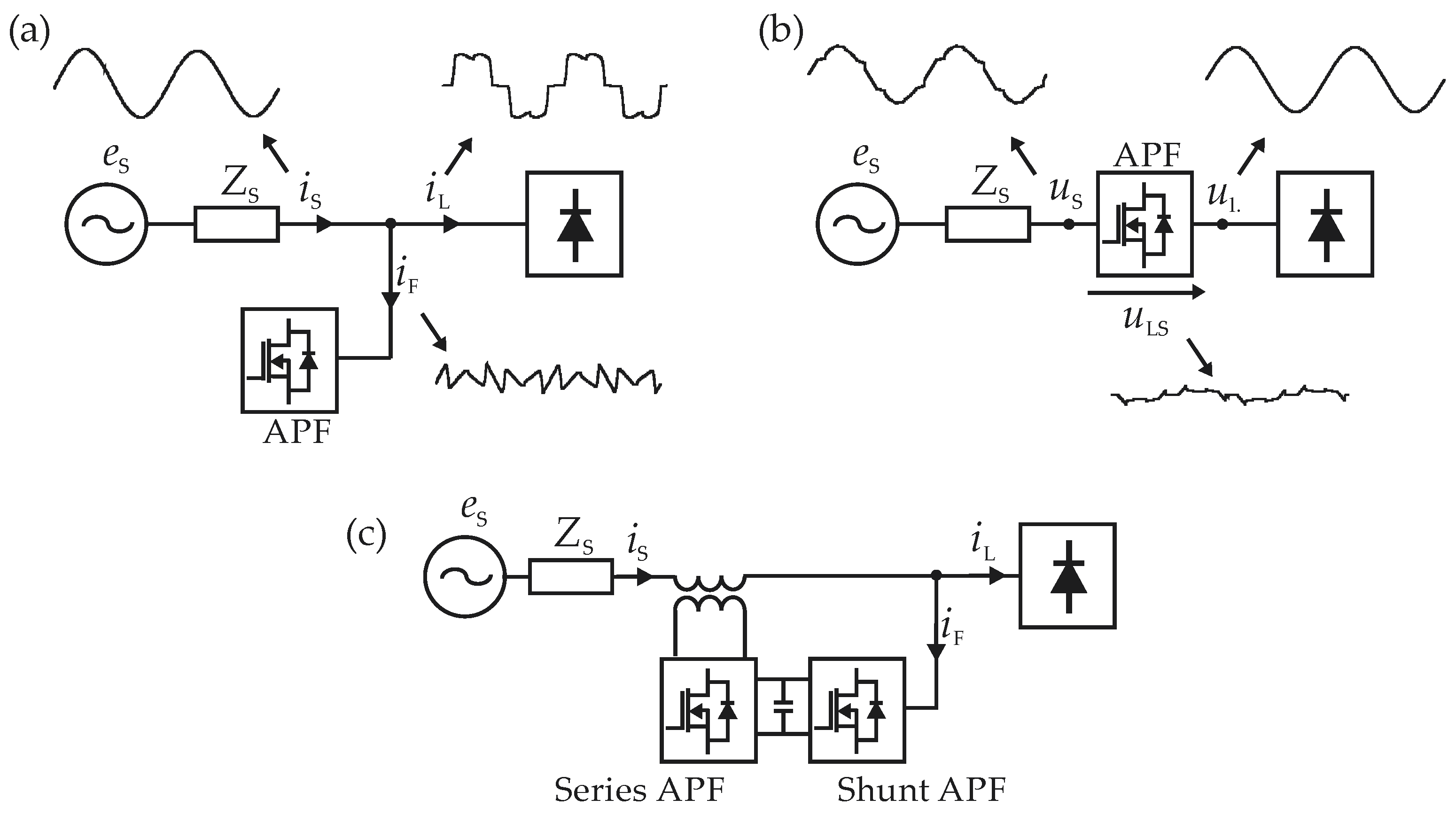
- reduce higher harmonics;
- compensate the reactive power of the fundamental harmonic;
- symmetrize (balancing) the loads, as seen from the network terminals.
- compensation of voltage drop across the network impedance (including higher harmonics);
- reduction of higher harmonics generated by the eS source;
- symmetrization and reduction of source voltage fluctuations.
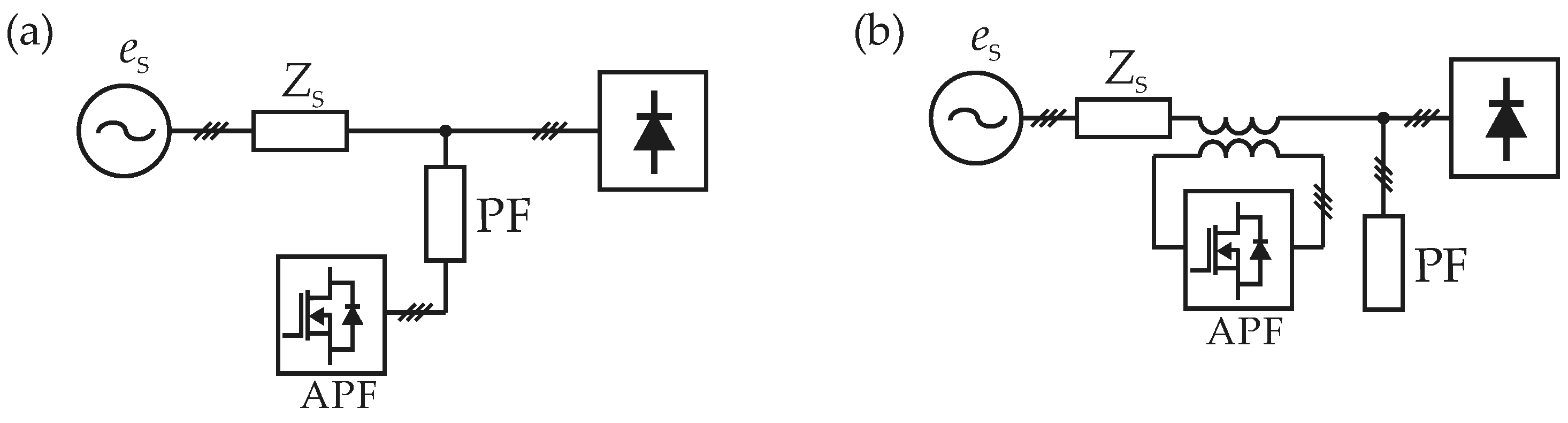
- the possibility of implementing several functions simultaneously using a single filter (e.g., reduction of harmonics and fundamental harmonic reactive power compensation);
- slight influence of network parameters on the system properties;
- the ability to adjust the control to the current conditions;
- relatively small size;
- not susceptible to resonance phenomena.
- higher installation cost compared to passive filters;
- limitations of maximum currents and voltages;
- complex control.
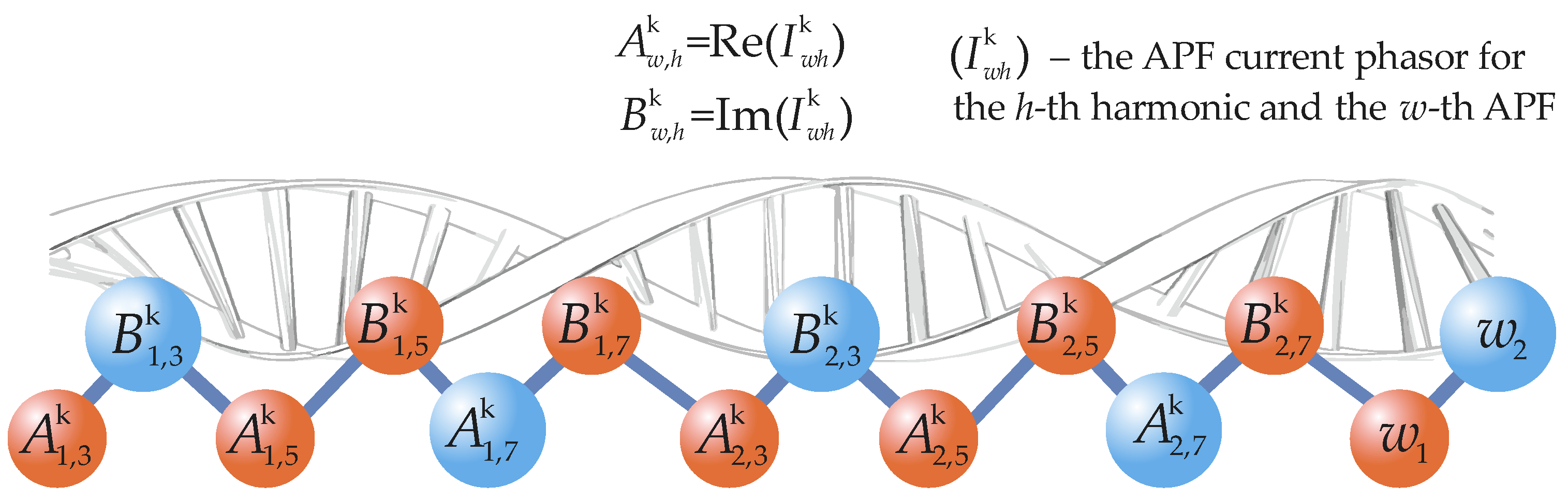
- H is the number of harmonics injected by the APF,
- w is the consecutive number of the APF,
- is the APF current phasor for the h-th harmonic and the w-th APF:
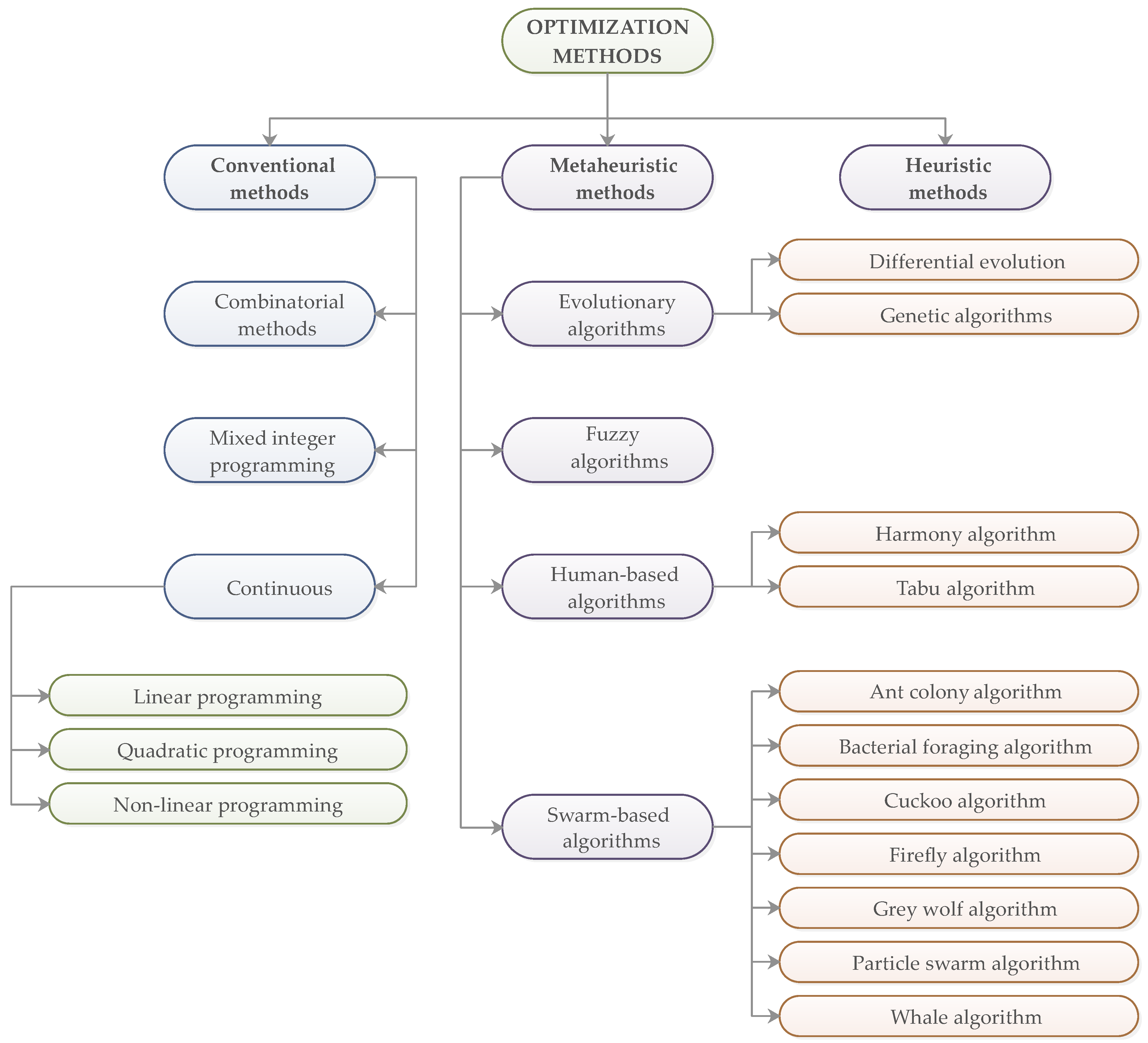
3. Optimization Methods Used in the Area of APF Sizing and Placement
3.1. Conventional Methods (Non-Heuristic)
- combinatorial [91]: uses the process of searching for the minima or maxima of a given goal function F, the domain of which is a discrete set with a large configuration space (as opposed to an N-dimensional continuous space);
- mixed integer programming [92]: adds one additional condition that at least one of the decision variables can only take integer values;
- continuous:
3.2. Metaheuristic Methods
3.2.1. Evolutionary Algorithms
- Differential evolution [97]: a relatively simple and effective algorithm that solves global continuous optimization problems by iteratively improving a potential solution using an evolutionary process. Compared to other evolutionary algorithms, the mutation process is performed before the crossover and the crossover itself has an exchange form. The method of selecting individuals is also different. Due to its stochastic nature, it can search large areas of candidate space.
- Genetic algorithms [98]: these algorithms simulate the processes taking place in natural selection, only individuals that can adapt to given conditions can survive and reproduce, creating the next generation. In this algorithm, each individual represents a possible solution in the searched space.
3.2.2. Fuzzy
3.2.3. Human-Based Algorithms
- Harmony search [101]: uses a technique based on the behavior of musicians. When composing a given melody, they strive to obtain a perfect harmony with the set of tones/sounds proposed by them. The process of searching for this perfect harmony is convergent with the search for the optimal solution to a given problem.
- Tabu search [102]: the basis for the operation of this algorithm is to search the space of solutions with a given sequence of movements, among which there are also forbidden movements, the so-called taboo. The algorithm prevents getting stuck in a local optimum through special tabu lists containing already proven solutions.
3.2.4. Swarm-Based Algorithms
- Ant colony algorithm [104]: based on methods of searching for the shortest paths in graphs, imitating the behavior of an ant colony, which marks the path with pheromones when searching for food. Ants follow the path of pheromones, which, however, begin to disappear over time. In keeping with the nature of this phenomenon, the shortest path will disappear last.
- Bacterial foraging algorithm [105]: this algorithm was proposed by Passino in 2002 and is based on the environmental behavior of E. Coli bacteria. From a biological point of view, it is an imitation of the process of searching for food by bacteria while maintaining a minimal energy input.
- Cuckoo optimization algorithm [106]: this algorithm is used in the area of continuous nonlinear optimization. The algorithm was inspired by the habits of cuckoo birds, in particular their lifestyle and their manner of laying eggs. The main goal of the algorithm, by nature, is the survival of the species. The initial population includes both adults and offspring eggs. Some of them die as a result of competition for survival, and those who survive migrate to better areas where they can lay eggs (reproduce). Ultimately, survivors form a single society, all with the same profit values.
- Firefly algorithm [107]: an algorithm proposed by Yang inspired by the behavior of fireflies and their methods of bioluminescent communication. Fireflies are unisexual organisms and their brightness determines their attractiveness. Thus, individuals shining brighter attract individuals with less brightness, creating clusters of different intensity (gathered around local optima). Therefore, the algorithm must also include a dynamic decision-making process, the task of which is to discount the effect of distant fireflies and, thus, identify many peaks of functions, among which there is a solution to the problem.
- Grey wolf optimization algorithm [108]: based on the pack behavior of the grey wolf, it consists in marking the three best solutions (similarly to the three strongest individuals in the pack) as alpha, beta, and delta, and hunting techniques, i.e., tracking, circling and attacking the prey (solving the problem), in which all the other pack members follow precisely these three strongest.
- Particle swarm optimization algorithm [109]: a very popular stochastic optimization algorithm inspired by the rules of behavior of a large flock of birds. It can, therefore, be said that this algorithm is the result of millions of years of natural selection process aimed at achieving the goal with minimal energy expenditure. As in nature, the observable neighborhood is limited to a certain range; therefore, it may converge to the local minimum, but due to the size of the swarm and the presence of other individuals, it does not allow the algorithm to get stuck at this point. Therefore, the swarm as a whole allows the finding of the global minimum of the error function.
- Whale algorithm [110]: proposed in 2016 and based on the behavior of humpback whales, and more specifically on their hunting methods. They use a technique called bubble mesh. Humpback whales hunt shoals of krill or small fish close to the surface, and to do this use a bubble-making technique along a circle or a nine-shaped path.
4. Optimization Problem Definitions Used in APF Placement and Sizing
- w is the consecutive number of the APF;
- W is the maximum number of nodes in which an APF can be placed, W ≤ W′ (W′ is the total number of nodes in a system under consideration);
- T[w] is the node number in which the w-th APF is connected, T[w] ≤ W′,
- h is the harmonic number.
- THDV maximum value:
- THDV maximum average value in a given time horizon expressed by variable y:
- THDV value at PCC:
- THDV value at each node:
- THDI value at each node:
- the sum of THDV at all nodes:
- the sum of THDI at all nodes:
- The RMS values of the APF currents must be higher than the lower limit and lower than the upper limit (the lower limit is usually set to 0):
- The RMS values of the APF successive current harmonics are limited, in accordance with the APF technical specification:
- The commercially available discrete sizes of the APFs can also be taken into account by introducing the base unit size of the APF represented by and one of the following constraints:
- The RMS values of voltage harmonics in all nodes must be lower than the given maximum values:
- The values of voltage THD factors in all nodes must be lower than the given maximum value THDVmax:
- The RMS values of current harmonics in all lines must be lower than the given maximum values:
- Values of current THD factors in all lines must be lower than the given maximum value THDImax:
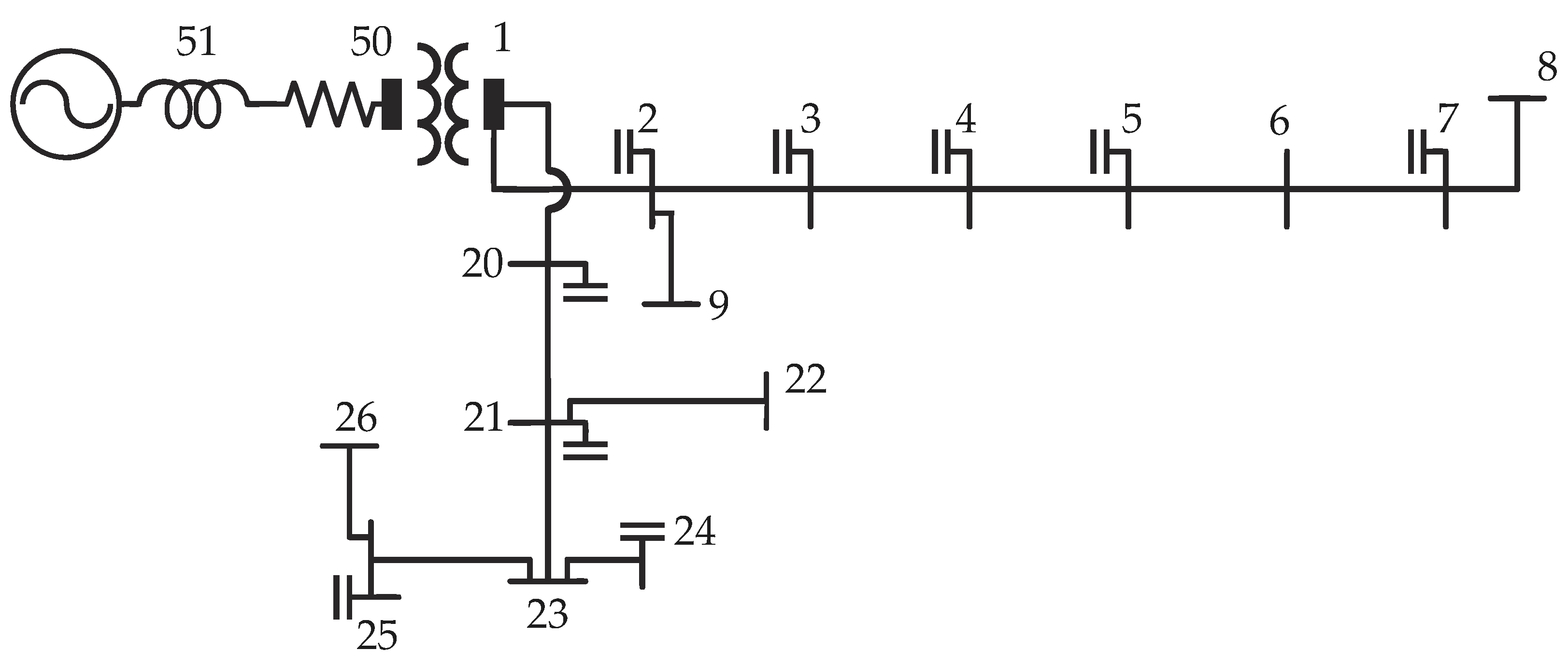
5. Test Systems and Software Solutions
6. Review of Optimization Methods of Active Power Filter Sizing and Placement
6.1. Classic Methods
6.2. Metaheuristic Methods
- traffic safety, which ensures the ability to move in space without the risk of collision;
- spreading, to establish minimum distances between individuals;
- grouping, to establish maximum distances between individuals;
- orientation, or the ability to find specific points in a given space.
7. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| APF | Active Power Filter |
| APLC | Active Power Line Conditioner |
| APQC | Active Power Quality Conditioner |
| AGFO | Adaptive Grey Wolf Optimizer |
| AC | Alternating Current |
| ACS | Ant Colony System |
| ABC | Artificial Bee Colony |
| BFOA | Bacterial Foraging Optimization Algorithm |
| COA | Cuckoo Optimization Algorithm |
| CPD | Custom Power Device |
| CSI | Current-Source Inverter |
| DE | Differential Evolution |
| DPSO | Discrete Particle Swarm Optimization |
| DNIS | Dominant Nodes Integrated Sensitivity |
| DNSS | Dominant Nodes Single Sensitivity |
| DA | Dragonfly Algorithm |
| DDFA | Dynamic Discrete Firefly Algorithm |
| EA | Evolutionary Algorithm |
| GA-I-PSO | GA-Based Initialization for PSO |
| GBDT | Generalized Benders Decomposition Theory |
| GA | Genetic Algorithm |
| GSA | Gravitational Search Algorithm |
| GFO | Grey Wolf Optimizer |
| HD | Harmonic Distortion |
| HPF | Harmonic Power Flow |
| HTLL | Harmonic Transmission Line Loss |
| HS | Harmony Search |
| HAPF | Hybrid Active Power Filter |
| HIGA | Hybrid Improved Genetic Algorithm |
| IRPC | Instantaneous Reactive Power Compensator |
| MABICA | Modified Adaptive Binary Imperialist Competitive Algorithm |
| MAPSO | Modified Adaptive Particle Swarm Optimization |
| MDPSO | Modified Discrete Particle Swarm Optimization |
| MLL | Motor Load Loss |
| MOPSO | Multi Objective Particle Swarm Optimization |
| MGS | Multiple Gradient Summation |
| NP | Non-deterministic Polynomial |
| OUPQC | Open Unified Power Quality Conditioner |
| PSO | Particle Swarm Optimization |
| PCC | Point of Common Coupling |
| PF | Passive Filter |
| PQ | Power Quality |
| RDPF | Radial Distribution Power Flow |
| RMS | Root Mean Square |
| SAPF | Shunt Active Power Filter |
| STF | Single Tuned Filter |
| SFA | Static Firefly Algorithm |
| SVG | Static VAR Generator |
| TDD | Total Demand Distortion |
| THD | Total Harmonics Distortion |
| THDV | Total Harmonics Distortion of Voltage |
| TIF | Telephone Interference Factor |
| UPQC | Unified Power Quality Conditioner |
| VDAPF | Voltage Detection Active Power Filter |
| VSI | Voltage-Source Inverter |
| WHA | Whale Optimization Algorithm |
References
- Eroğlu, H.; Cuce, E.; Mert Cuce, P.; Gul, F.; Iskenderoğlu, A. Harmonic problems in renewable and sustainable energy systems: A comprehensive review. Sustain. Energy Technol. Assess. 2021, 48, 101566. [Google Scholar] [CrossRef]
- Kalair, A.; Abas, N.; Kalair, A.R.; Saleem, Z.; Khan, N. Review of harmonic analysis, modeling and mitigation techniques. Renew. Sustain. Energy Rev. 2017, 78, 1152–1187. [Google Scholar] [CrossRef]
- Prakash Mahela, O.; Gafoor Shaik, A. Topological aspects of power quality improvement techniques: A comprehensive overview. Renew. Sustain. Energy Rev. 2016, 58, 1129–1142. [Google Scholar] [CrossRef]
- Arrillaga, J.; Watson, N.R. Power System Harmonics; Wiley: Hoboken, NJ, USA, 2003. [Google Scholar]
- Fuchs, E.; Masoum, M.A.S. Power Quality in Power Systems and Electrical Machines; Academic Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Handbook of Power Quality; Baggini, A. (Ed.) John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Targosz, R.; Manson, J. Pan-European power quality survey. In Proceedings of the 2007 9th International Conference on Electrical Power Quality and Utilisation, Barcelona, Spain, 9–11 October 2007; pp. 1–6. [Google Scholar]
- Beleiu, H.G.; Beleiu, I.N.; Pavel, S.G.; Darab, C.P. Management of power quality issues from an economic point of view. Sustainability 2018, 10, 2326. [Google Scholar] [CrossRef] [Green Version]
- Grady, W.M.; Samotyj, M.J.; Noyola, A.H. The Application of Network Objective Functions for Actively Minimizing the Impact of Voltage Harmonics in Power Systems. IEEE Trans. Power Deliv. 1992, 7, 1379–1386. [Google Scholar] [CrossRef]
- IEEE Standard 519-2014; IEEE 519 Recommended Practice and Requirements for Harmonic Control in Electric Power Systems. IEEE: New York, NY, USA, 2014.
- IEC Standard 61000-4-30; Testing and Measurement Techniques-Power Quality Measurement Methods. International Electrotechnical Commission (IEC): Geneva, Switzerland, 2015.
- IEC Standard 61000-4-7; General Guide on Harmonics and Interharmonics Measurements, for Power Supply Systems and Equipment Connected Thereto. International Electrotechnical Commission (IEC): Geneva, Switzerland, 2010.
- Arranz-Gimon, A.; Zorita-Lamadrid, A.; Morinigo-Sotelo, D.; Duque-Perez, O. A review of total harmonic distortion factors for the measurement of harmonic and interharmonic pollution in modern power systems. Energies 2021, 14, 6467. [Google Scholar] [CrossRef]
- Ribeiro, P. Time-Varying Waveform Distortions in Power Systems; John Wiley & Sons: New York, NY, USA, 2009. [Google Scholar]
- IEC Standard 61000-3-2; Limits for Harmonic Current Emissions (Equipment Input Current ≤16 A per Phase). International Electrotechnical Commission (IEC): Geneva, Switzerland, 2019.
- IEC Standard 61000-3-12; Limits for Harmonic Currents Produced by Equipment Connected to Public Low-Voltage Systems with Input Current >16 A and ≤75 A Per Phase. International Electrotechnical Commission (IEC): Geneva, Switzerland, 2020.
- Das, J.C. Passive Filters—Potentialities and Limitations. IEEE Trans. Ind. Appl. 2004, 40, 232–241. [Google Scholar] [CrossRef]
- Das, J.C. Power System Harmonics and Passive Filter Designs; Wiley: Piscataway, NJ, USA, 2015. [Google Scholar]
- Park, B.; Lee, J.; Yoo, H.; Jang, G. Harmonic mitigation using passive harmonic filters: Case study in a steel mill power system. Energies 2021, 14, 2278. [Google Scholar] [CrossRef]
- Badrzadeh, B.; Smith, K.S.; Wilson, R.C. Designing passive harmonic filters for an aluminum smelting plant. IEEE Trans. Ind. Appl. 2011, 47, 973–983. [Google Scholar] [CrossRef]
- Hu, H.; He, Z.; Gao, S. Passive filter design for China high-speed railway with considering harmonic resonance and characteristic harmonics. IEEE Trans. Power Deliv. 2015, 30, 505–514. [Google Scholar] [CrossRef]
- Lange, A.G.; Redlarski, G. Selection of C-type filters for reactive power compensation and filtration of higher harmonics injected into the transmission system by arc furnaces. Energies 2020, 13, 2330. [Google Scholar] [CrossRef]
- Ali, Z.M.; Alenezi, F.Q.; Kandil, S.S.; Abdel Aleem, S.H.E. Practical considerations for reactive power sharing approaches among multiple-arm passive filters in non-sinusoidal power systems. Int. J. Electr. Power Energy Syst. 2018, 103, 660–675. [Google Scholar] [CrossRef]
- Sasaki, H.; Machida, T. A new method to eliminate AC harmonic currents by magnetic flux compensation-considerations on basic design. IEEE Trans. Power Apparat. Syst. 1971, PAS-90, 2009–2019. [Google Scholar] [CrossRef]
- Gyugyi, L.; Strycula, E.C. Active AC power filters. In Proceedings of the IEEE IAS Annual Meeting, Chicago, IL, USA, 11–14 October 1976; p. 529. [Google Scholar]
- Akagi, H.; Kanazawa, Y.; Nabae, A. Instantaneous reactive power compensators comprising switching devices without energy storage components. IEEE Trans. Ind. Appl. 1984, IA-20, 625–630. [Google Scholar] [CrossRef]
- Akagi, H.; Nabae, A.; Atoh, S. Control strategy of active power filters using multiple voltage-source PWM converters. IEEE Trans. Ind. Appl. 1986, IA-22, 460–465. [Google Scholar] [CrossRef]
- Watanabe, E.H.; Akagi, H.; Aredes, M. Instantaneous P-q power theory for compensating nonsinusoidal systems. In Proceedings of the 2008 International School on Nonsinusoidal Currents and Compensation, Lagow, Poland, 10–13 June 2008; pp. 1–10. [Google Scholar]
- Bhattacharya, S.; Divan, D. Synchronous frame based controller implementation for a hybrid series active filter system. In Proceedings of the IAS ’95. Conference Record of the 1995 IEEE Industry Applications Conference Thirtieth IAS Annual Meeting, Orlando, FL, USA, 8–12 October 1995; Volume 3, pp. 2531–2540. [Google Scholar]
- Bhattacharya, S.; Frank, T.M.; Divan, D.M.; Banerjee, B. Active filter system implementation. IEEE Ind. Appl. Mag. 1998, 4, 47–63. [Google Scholar] [CrossRef]
- Hoon, Y.; Radzi, M.A.M.; Hassan, M.K.; Mailah, N.F.; Wahab, N.I.A. A simplified synchronous reference frame for indirect current controlled three-level inverter-based shunt active power filters. J. Power Electron. 2016, 16, 1964–1980. [Google Scholar] [CrossRef] [Green Version]
- Asiminoael, L.; Blaabjerg, F.; Hansen, S. Detection is key—Harmonic detection methods for active power filter applications. IEEE Ind. Appl. Mag. 2007, 13, 22–33. [Google Scholar] [CrossRef]
- Srividhya, J.P.; Sivakumar, D.; Shanmathi, T. A review on causes, effects, and detection techniques of harmonics in the power system. In Proceedings of the 2016 International Conference on Computation of Power, Energy Information and Commuincation (ICCPEIC), Melmaruvathur, India, 20–21 April 2016; pp. 680–686. [Google Scholar]
- Hoon, Y.; Mohd Radzi, M.A.; Hassan, M.K.; Mailah, N.F. Control algorithms of shunt active power filter for harmonics mitigation: A review. Energies 2017, 10, 2038. [Google Scholar] [CrossRef] [Green Version]
- Sozański, K. Three phase active power filter with selective harmonics elimination. Arch. Electr. Eng. 2016, 65, 33–44. [Google Scholar] [CrossRef] [Green Version]
- Le Roux, A.D.; Mouton, H.D.T.; Akagi, H. DFT-based repetitive control of a series active filter integrated with a 12-pulse diode rectifier. IEEE Trans. Power Electron. 2009, 24, 1515–1521. [Google Scholar] [CrossRef]
- Fathi, S.H.; Pishvaei, M.; Gharehpetian, G.B. A Frequency domain method for instantaneous determination of reference current in shunt active filter. In Proceedings of the TENCON 2006–2006 IEEE Region 10 Conference, Hong Kong, China, 14–17 November 2006; pp. 1–4. [Google Scholar]
- Nedeljkovic, D.; Nemec, M.; Drobnic, K.; Ambrozic, V. Direct current control of active power filter without filter current measurement. In Proceedings of the Automation and Motion 2008 International Symposium on Power Electronics, Electrical Drives, Ischia, Italy, 11–13 June 2008; pp. 72–76. [Google Scholar]
- Ketzer, M.B.; Jacobina, C.B. Multivariable load current sensorless controller for universal active power filter. IET Power Electron. 2014, 7, 1777–1786. [Google Scholar] [CrossRef]
- Ketzer, M.B.; Jacobina, C.B. Virtual flux sensorless control for shunt active power filters with quasi-resonant compensators. IEEE Trans. Power Electron. 2016, 31, 4818–4830. [Google Scholar] [CrossRef]
- Janpong, S.; Areerak, K.; Areerak, K. Harmonic detection for shunt active power filter using ADALINE neural network. Energies 2021, 14, 4351. [Google Scholar] [CrossRef]
- Choudhary, J.; Singh, D.K.; Verma, S.N.; Ahmad, K. Artificial intelligence based control of a shunt active power filter. Proc. Comput. Sci. 2016, 92, 273–281. [Google Scholar] [CrossRef] [Green Version]
- Hou, S.; Fei, J.; Chen, C.; Chu, Y. Finite-time adaptive fuzzy-neural-network control of active power filter. IEEE Trans. Power Electron. 2019, 34, 10298–10313. [Google Scholar] [CrossRef]
- Fei, J.; Chu, Y. Double hidden layer output feedback neural adaptive global sliding mode control of active power filter. IEEE Trans. Power Electron. 2020, 35, 3069–3084. [Google Scholar] [CrossRef]
- Iqbal, M.; Jawad, M.; Jaffery, M.H.; Akhtar, S.; Rafiq, M.N.; Qureshi, M.B.; Ansari, A.R.; Nawaz, R. Neural networks based shunt hybrid active power filter for harmonic elimination. IEEE Access 2021, 9, 69913–69925. [Google Scholar] [CrossRef]
- Khadem, S.K.; Basu, M.; Conlon, M.F. A review of parallel operation of active power filters in the distributed generation system. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011; pp. 1–10. [Google Scholar]
- Gali, V.; Gupta, N.; Gupta, R.A. Mitigation of power quality problems using shunt active power filters: A comprehensive review. In Proceedings of the 2017 12th IEEE Conference on Industrial Electronics and Applications (ICIEA), Siem Reap, Cambodia, 18–20 June 2017; pp. 1100–1105. [Google Scholar]
- Crepaldi, J.; Amoroso, M.M.; Ando, O.H. Analysis of the topologies of power filters applied in distributed generation units—Review. IEEE Latin Am. Trans. 2018, 16, 1892–1897. [Google Scholar] [CrossRef]
- Li, D.; Wang, T.; Pan, W.; Ding, X.; Gong, J. A comprehensive review of improving power quality using active power filters. Electr. Power Syst. Res. 2021, 199, 107389. [Google Scholar] [CrossRef]
- Waware, M.; Agarwal, P. A review of multilevel inverter based active power filter. IJCEE 2011, 3, 196–205. [Google Scholar] [CrossRef]
- Routimo, M.; Salo, M.; Tuusa, H. Comparison of voltage-source and current-source shunt active power filters. In Proceedings of the 2005 IEEE 36th Power Electronics Specialists Conference, Dresden, Germany, 16 June 2005; pp. 2571–2577. [Google Scholar]
- Soeiro, T.B.; Schweizer, M.; Linner, J.; Ranstad, P.; Kolar, J.W. Comparison of 2- and 3-level active filters with enhanced bridge-leg loss distribution. In Proceedings of the 8th International Conference on Power Electronics—ECCE Asia, Jeju, Korea, 30 May–3 June 2011; pp. 1835–1842. [Google Scholar]
- Panda, A.K.; Patnaik, S.S. Analysis of cascaded multilevel inverters for active harmonic filtering in distribution networks. Int. J. Electr. Power Energy Syst. 2015, 66, 216–226. [Google Scholar] [CrossRef]
- Buła, D.; Jarek, G.; Michalak, J.; Zygmanowski, M. Control method of four wire active power filter based on three-phase neutral point clamped T-type converter. Energies 2021, 14, 8427. [Google Scholar] [CrossRef]
- Zahira, R.; Peer Fathima, A. A technical survey on control strategies of active filter for harmonic suppression. Proced. Eng. 2012, 30, 686–693. [Google Scholar] [CrossRef] [Green Version]
- Das, S.R.; Ray, P.K.; Sahoo, A.K.; Ramasubbareddy, S.; Babu, T.S.; Kumar, N.M.; Elavarasan, R.M.; Mihet-Popa, L. A comprehensive survey on different control strategies and applications of active power filters for power quality improvement. Energies 2021, 14, 4589. [Google Scholar] [CrossRef]
- Kumar, R.; Bansal, H.O. Shunt active power filter: Current status of control techniques and its integration to renewable energy sources. Sustain. Cities Soc. 2018, 42, 574–592. [Google Scholar] [CrossRef]
- Hoon, Y.; Mohd Radzi, M.A.; Mohd Zainuri, M.A.A.; Zawawi, M.A.M. Shunt active power filter: A review on phase synchronization control techniques. Electronics 2019, 8, 791. [Google Scholar] [CrossRef] [Green Version]
- Benchouia, M.T.; Ghadbane, I.; Golea, A.; Srairi, K.; Benbouzid, M.H. Design and implementation of sliding mode and PI controllers based control for three phase shunt active power filter. Energy Proced. 2014, 50, 504–511. [Google Scholar] [CrossRef] [Green Version]
- Tang, Y.; Loh, P.C.; Wang, P.; Choo, F.H.; Gao, F.; Blaabjerg, F. Generalized design of high performance shunt active power filter with output LCL filter. IEEE Trans. Ind. Electron. 2012, 59, 1443–1452. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, B. Optimized LCR output filter of APF based on genetic algorithm. In Proceedings of the 2016 IEEE International Conference on Power and Renewable Energy (ICPRE), Shanghai, China, 21–23 October 2016; pp. 151–155. [Google Scholar]
- Baszynski, M.; Sowa, K.; Pirog, S. An active power filter with energy storage and double DC conversion for power surge compensation. Electronics 2020, 9, 1489. [Google Scholar] [CrossRef]
- Rajesh Babu, N.; Venu Gopala Rao, M.; Srinivasa Rao, R. Battery energy integrated active power filter for harmonic compensation and active power injection. Sustain. Comput. Informat. Syst. 2022, 35, 100664. [Google Scholar] [CrossRef]
- Ravinder, K.; Bansal, H.O. Investigations on shunt active power filter in a PV-wind-FC based hybrid renewable energy system to improve power quality using hardware-in-the-loop testing platform. Electr. Power Syst. Res. 2019, 177, 105957. [Google Scholar] [CrossRef]
- Takeda, M.; Ikeda, K.; Teramoto, A.; Aritsuka, T. Harmonic current compensation with active filter. In Proceedings of the IEEE/IAS Annual Meeting, Atlanta, GA, USA, 18–23 October 1987. [Google Scholar]
- Peng, F.Z.; Akagi, H.; Nabae, A. A new approach to harmonic compensation in power systems—A combined system of shunt passive and series active filters. IEEE Trans. Ind. Appl. 1990, 26, 983–990. [Google Scholar] [CrossRef]
- Fujita, H.; Akagi, H. A practical approach to harmonic compensation in power systems-series connection of passive and active filters. IEEE Trans. Ind. Appl. 1991, 27, 1020–1025. [Google Scholar] [CrossRef] [Green Version]
- Bhattacharya, S.; Cheng, P.-T.; Divan, D.M. Hybrid solutions for improving passive filter performance in high power applications. IEEE Trans. Ind. Appl. 1997, 33, 732–747. [Google Scholar] [CrossRef]
- Luo, A.; Shuai, Z.; Shen, Z.; Zhu, W.; Xu, X. Design Considerations for Maintaining DC-Side Voltage of Hybrid Active Power Filter With Injection Circuit. IEEE Trans. Power Electron. 2009, 24, 75–84. [Google Scholar] [CrossRef]
- Deng, Y.; Tong, X.; Jia, H. A bidirectional control principle of active tuned hybrid power filter based on the active reactor using active techniques. IEEE Trans. Ind. Inform. 2015, 11, 141–154. [Google Scholar] [CrossRef]
- Tareen, W.U.K.; Mekhielf, S. Three-phase transformerless shunt active power filter with reduced switch count for harmonic compensation in grid-connected applications. IEEE Trans. Power Electron. 2018, 33, 4868–4881. [Google Scholar] [CrossRef]
- Xiang, Z.; Pang, Y.; Wang, L.; Wong, C.; Lam, C.-S.; Wong, M.C. Design, control and comparative analysis of a LCLC coupling hybrid active power filter. IET Power Electron. 2020, 13, 1207–1217. [Google Scholar] [CrossRef]
- Marques, H.; Anunciada, A.V. A new hybrid power filter topology enabling low voltage switching devices and storage capacitors. In Proceedings of the 2005 IEEE 36th Power Electronics Specialists Conference, Dresden, Germany, 16 July 2005; pp. 1935–1940. [Google Scholar] [CrossRef]
- Han, Y.; Xu, L.; Khan, M.M.; Chen, C.; Yao, G.; Zhou, L.-D. Robust deadbeat control scheme for a hybrid APF with resetting filter and ADALINE-based harmonic estimation algorithm. IEEE Trans. Ind. Electron. 2011, 58, 3893–3904. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Chakraborty, C.; Bhattacharya, S. Parallel-connected shunt hybrid active power filters operating at different switching frequencies for improved performance. IEEE Trans. Ind. Electron. 2012, 59, 4007–4019. [Google Scholar] [CrossRef]
- Nguyen, T.N.; Luo, A.; Shuai, Z.; Chau, M.T.; Li, M.; Zhou, L. Generalised design method for improving control quality of hybrid active power filter with injection circuit. IET Power Electron. 2014, 7, 1204–1215. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, J.; Feng, L.; Wang, C. A novel hybrid modular three-level shunt active power filter. IEEE Trans. Power Electron. 2018, 33, 7591–7600. [Google Scholar] [CrossRef]
- Cleary-Balderas, A.; Medina-Rios, A.; Cruz-Hernéndez, O. Hybrid active power filter based on the IRP theory for harmonic current mitigation. In Proceedings of the 2016 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 9–11 November 2016; pp. 1–5. [Google Scholar]
- Khalid, S.; Kumar, N.; Mishra, V. Performance evaluation of adaptive tabu search algorithm optimized sinusoidal fryze voltage control based hybrid series active power filter. Int. J. Electr. Eng. Inform. 2014, 6, 511–520. [Google Scholar] [CrossRef]
- Abdullah, A.; Biswal, G.R.; Roy, A.K. Modeling and control of hybrid power filter using P-q yheory. In Proceedings of the 2016 IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016; pp. 1–6. [Google Scholar]
- Mekhilef, S.; Tarek, M.; Abd Rahim, N. Rahim single-phase hybrid active power filter with adaptive notch filter for harmonic current estimation. IETE J. Res. 2011, 57, 20–28. [Google Scholar] [CrossRef] [Green Version]
- Luo, A.; Shuai, Z.; Zhu, W.; Fan, R.; Tu, C. Development of hybrid active power filter based on the adaptive fuzzy dividing frequency-control method. IEEE Trans. Power Deliv. 2009, 24, 424–432. [Google Scholar] [CrossRef]
- Somlal, J.; Rao, M.V.G.; Karthikeyan, S.P. Experimental investigation of an indirect current controlled fuzzy-SVPWM based shunt hybrid active power filter. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016; pp. 801–806. [Google Scholar]
- Durna, E. Adaptive fuzzy hysteresis band current control for reducing switching losses of hybrid active power filter. IET Power Electron. 2018, 11, 937–944. [Google Scholar] [CrossRef]
- Zhou, X.; Cui, Y.; Ma, Y. Fuzzy linear active sisturbance rejection control of injection hybrid active power filter for medium and high voltage distribution network. IEEE Access 2021, 9, 8421–8432. [Google Scholar] [CrossRef]
- Rahmani, S.; Hamadi, A.; Al-Haddad, K. A lyapunov-function-based control for a three-phase shunt hybrid active filter. IEEE Trans. Ind. Electron. 2012, 59, 1418–1429. [Google Scholar] [CrossRef]
- Wong, M.-C.; Pang, Y.; Xiang, Z.; Wang, L.; Lam, C.-S. Assessment of active and hybrid power filters under space vector modulation. IEEE Trans. Power Electron. 2021, 36, 2947–2963. [Google Scholar] [CrossRef]
- Akagi, H.; Watanabe, E.H.; Aredes, M. The instantaneous power theory. In Instantaneous Power Theory and Applications to Power Conditioning, 2nd ed.; IEEE: Piscataway, NJ, USA, 2017; pp. 37–109. [Google Scholar]
- Cheng, P.-T.; Bhattacharya, S.; Divan, D.M. Hybrid solutions for improving passive filter performance in high power applications. In Proceedings of the Applied Power Electronics Conference APEC ’96, San Jose, CA, USA, 3–7 March 1996; Volume 2, pp. 911–917. [Google Scholar]
- Salmeron, P.; Litran, S.P. Improvement of the electric power quality using series active and shunt passive filters. IEEE Trans. Power Deliv. 2010, 25, 1058–1067. [Google Scholar] [CrossRef]
- Schrijver, A. Combinatorial Optimization: Polyhedra and Efficiency; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2003; ISBN 978-3-540-44389-6. [Google Scholar]
- Wolsey, L.A. Mixed integer programming. In Wiley Encyclopedia of Computer Science and Engineering; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2008; pp. 1–10. ISBN 978-0-470-05011-8. [Google Scholar]
- Alevras, D.; Padberg, M.; Padberg, M.W. Linear Optimization and Extensions: Problems and Solutions; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2001; ISBN 978-3-540-41744-6. [Google Scholar]
- Lazimy, R. Mixed-integer quadratic programming. Math. Program. 1982, 22, 332–349. [Google Scholar] [CrossRef]
- Sequential quadratic programming. In Numerical Optimization; Nocedal, J.; Wright, S.J. (Eds.) Springer Series in Operations Research and Financial Engineering; Springer: New York, NY, USA, 2006; pp. 529–562. ISBN 978-0-387-40065-5. [Google Scholar]
- Avriel, M. Nonlinear Programming: Analysis and Methods; Courier Corporation: North Chelmsford, MA, USA, 2003; ISBN 978-0-486-43227-4. [Google Scholar]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; MIT Press: Cambridge, MA, USA, 1992; ISBN 978-0-262-58111-0. [Google Scholar]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Lodwick, W.A.; Kacprzyk, J. Fuzzy optimization. In Recent Advances and Applications. Studies in Fuzziness and Soft Computing; Springer: Berlin, Germany, 2010. [Google Scholar]
- Geem, Z.; Kim, J.; Loganathan, G. A new heuristic optimization algorithm: Harmony search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Glover, F. Future paths for integer programming and links to artificial intelligence. Comput. Oper. Res. 1986, 13, 533–549. [Google Scholar] [CrossRef]
- Reynolds, C.W. Flocks, herds and schools: A distributed behavioral model. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 27–31 July 1987; pp. 25–34. [Google Scholar]
- New Ideas in Optimization; Corne, D.; Dorigo, M.; Glover, F.; Dasgupta, D.; Moscato, P.; Poli, R.; Price, K.V. (Eds.) McGraw-Hill Ltd.: New York, NY, USA, 1999; ISBN 978-0-07-709506-2. [Google Scholar]
- Passino, K.M. Biomimicry of bacterial foraging for distributed optimization and control. IEEE Control Syst. Mag. 2002, 22, 52–67. [Google Scholar] [CrossRef]
- Rajabioun, R. Cuckoo optimization algorithm. Appl. Soft Comput. 2011, 11, 5508–5518. [Google Scholar] [CrossRef]
- Yang, X.-S. Nature-Inspired Metaheuristic Algorithms; Luniver Press: Frome, UK, 2008; ISBN 978-1-905986-10-1. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Mirjalili, S.; Lewis, A. The Whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Keypour, R.; Seifi, H.; Yazdian-Varjani, A. Genetic based algorithm for active power filter allocation and sizing. Electr. Power Syst. Res. 2004, 71, 41–49. [Google Scholar] [CrossRef]
- Dehghani, N.; Ziari, I. Optimal allocation of APLCs using genetic algorithm. In Proceedings of the 2008 43rd International Universities Power Engineering Conference, Padova, Italy, 1–4 September 2008; pp. 1–4. [Google Scholar]
- Surasmi, N.; Sindhu, M. Optimum allocation of active filters in A 4-bus system using genetic algorithm. Int. J. Emerg. Technol. Adv. Eng. 2012, 2, 251–256. [Google Scholar]
- Moradifar, A.; Soleymanpour, H.R. A fuzzy based solution for allocation and sizing of multiple active power filters. J. Power Electron. 2012, 12, 830–841. [Google Scholar] [CrossRef] [Green Version]
- Shivaie, M.; Salemnia, A.; Ameli, M.T. A multi-objective approach to optimal placement and sizing of multiple active power filters using a music-inspired algorithm. Appl. Soft Comput. 2014, 22, 189–204. [Google Scholar] [CrossRef]
- Ziari, I.; Jalilian, A. A new approach for allocation and sizing of multiple active power-line conditioners. IEEE Trans. Power Deliv. 2010, 25, 1026–1035. [Google Scholar] [CrossRef]
- Dehghan, N.; Ziari, I. Optimization placement APF based on bacterial foraging algorithm. In Proceedings of the 2011 46th International Universities’ Power Engineering Conference (UPEC), Soest, Germany, 5–8 September 2011; pp. 1–4. [Google Scholar]
- Lakum, A.; Mahajan, V. Optimal placement and sizing of multiple active power filters for radial distribution system using grey wolf optimizer. In Proceedings of the 2017 7th International Conference on Power Systems (ICPS), Pune, India, 21–23 December 2017; pp. 562–567. [Google Scholar]
- Lakum, A.; Mahajan, V. Cost effective optimal placement and sizing of active power filter using grey wolf optimization in radial distribution system. In Proceedings of the 2018 IEEE 8th Power India International Conference (PIICON), Kurukshetra, India, 10–12 December 2018; pp. 1–6. [Google Scholar]
- Lakum, A.; Mahajan, V. Optimal placement and sizing of multiple active power filters in radial distribution system using grey wolf optimizer in presence of nonlinear distributed generation. Electr. Power Syst. Res. 2019, 173, 281–290. [Google Scholar] [CrossRef]
- Moradi Far, A.; Akbari Foroud, A. Cost-effective optimal allocation and sizing of active power filters using a new fuzzy-MABICA method. IETE J. Res. 2016, 62, 307–322. [Google Scholar] [CrossRef]
- Tian, S.; Jia, Q.; Xue, S.; Yu, H.; Qu, Z.; Gu, T. Collaborative optimization allocation of VDAPFs and SVGs for simultaneous mitigation of voltage harmonic and deviation in distribution networks. Int. J. Electr. Power Energy Syst. 2020, 120, 106034. [Google Scholar] [CrossRef]
- Amini, M.; Jalilian, A. Optimal sizing and location of open-UPQC in distribution networks considering load growth. Int. J. Electr. Power Energy Syst. 2021, 130, 106893. [Google Scholar] [CrossRef]
- Buła, D.; Grabowski, D.; Lewandowski, M.; Maciążek, M.; Piwowar, A. Software solution for modeling, sizing, and allocation of active power filters in distribution networks. Energies 2021, 14, 133. [Google Scholar] [CrossRef]
- Yamamoto, F.; Kitamura, A.; Fujita, N.; Nakanishi, Y.; Nagasawa, M. A Study on optimal locations and sizes of active filters as an additional function of distributed generation systems. In Proceedings of the IEEE SMC’99 Conference Proceedings. 1999 IEEE International Conference on Systems, Man, and Cybernetics (Cat. No.99CH37028), Tokyo, Japan, 12–15 October 1999; Volume 6, pp. 515–520. [Google Scholar]
- Maciążek, M.; Pasko, M.; Grabowski, D. Active power filters—Optimization of sizing and placement. Bull. Polish Acad. Sci. Tech. Sci. 2013, 847–853. [Google Scholar] [CrossRef] [Green Version]
- Lewandowski, M.; Walczak, J. Comparison of classic and optimization approach to active power filters sizing and placement. COMPEL: Int. J. Comput. Math. Electr. Electron. Eng. 2014, 33, 1877–1890. [Google Scholar] [CrossRef]
- Maciążek, M.; Grabowski, D.; Pasko, M. Genetic and combinatorial algorithms for optimal sizing and placement of active power filters. Int. J. Appl. Math. Comput. Sci. 2015, 25, 269–279. [Google Scholar] [CrossRef] [Green Version]
- Ying-Yi, H.; Ying-Kwun, C. Determination of locations and sizes for active power line conditioners to reduce harmonics in power systems. IEEE Trans. Power Deliv. 1996, 11, 1610–1617. [Google Scholar] [CrossRef]
- Ziari, I.; Jalilian, A. Optimal placement of an active filter in a power system. In Proceedings of the 2007 42nd International Universities Power Engineering Conference, Brighton, UK, 4–7 September 2007; pp. 1150–1154. [Google Scholar]
- Gehrke, C.S.; Lima, A.M.N.; Oliveira, A.C. Evaluating APLCs placement in a power system based on real-time simulation. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 2011–2016. [Google Scholar]
- Grabowski, D.; Walczak, J. Strategies for optimal allocation and sizing of active power filters. In Proceedings of the 2012 11th International Conference on Environment and Electrical Engineering, Venice, Italy, 18–25 May 2012; pp. 1098–1103. [Google Scholar]
- Grabowski, D.; Maciążek, M.; Pasko, M. Sizing of active power filters using some optimization strategies. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2013, 32, 1326–1336. [Google Scholar] [CrossRef] [Green Version]
- Carpinelli, G.; Russo, A.; Varilone, P. Active filters: A multi-objective approach for the optimal allocation and sizing in distribution networks. In Proceedings of the Automation and Motion 2014 International Symposium on Power Electronics, Electrical Drives, Ischia, Italy, 18–20 June 2014; pp. 1201–1207. [Google Scholar]
- Carpinelli, G.; Proto, D.; Russo, A. Optimal planning of active power filters in a distribution system using trade-off/risk method. IEEE Trans. Power Deliv. 2017, 32, 841–851. [Google Scholar] [CrossRef]
- Chang, H.-C.; Chang, T.-T. Optimal installation of three-phase active power line conditioners in unbalanced distribution systems. Electr. Power Syst. Res. 2001, 57, 163–171. [Google Scholar] [CrossRef]
- Urrutia Ramos, D.F.; Cortes, J.; Torres, H.; Gallego, L.E.; Delgadillo, A.; Buitrago, L. Implementation of genetic algorithms in ATP for optimal allocation and sizing of active power line conditioners. In Proceedings of the 2006 IEEE/PES Transmission Distribution Conference and Exposition, Caracas, Venezuela, 15–18 August 2006; pp. 1–5. [Google Scholar]
- Pasko, M.; Maciążek, M. Optimum allocation of active power filters in large supply systems. Bull. Polish Acad. Sci. Tech. Sci. 2016, 64, 37–44. [Google Scholar]
- Sarker, J.; Goswami, S.K. Optimal location of unified power quality conditioner in distribution system for power quality improvement. Int. J. Electr. Power Energy Syst. 2016, 83, 309–324. [Google Scholar] [CrossRef]
- Ahmed, M.; Masood, N.-A.-; Aziz, T. An Approach of incorporating harmonic mitigation units in an industrial distribution network with renewable penetration. Energy Rep. 2021, 7, 6273–6291. [Google Scholar] [CrossRef]
- Shivaie, M.; Salemnia, A.; Ameli, M.T. Optimal multi-objective placement and sizing of passive and active power filters by a fuzzy-improved harmony search algorithm. Int. Trans. Electr. Energy Syst. 2015, 25, 520–546. [Google Scholar] [CrossRef]
- Yan-song, W.; Hua, S.; Xue-min, L.; Jun, L.; Song-bo, G. Optimal allocation of the active filters based on the tabu algorithm in distribution network. In Proceedings of the 2010 International Conference on Electrical and Control Engineering, Wuhan, China, 25–27 June 2010; pp. 1418–1421. [Google Scholar]
- Ziari, I.; Jalilian, A. Optimal placement and sizing of multiple APLCs using a modified discrete PSO. Int. J. Electr. Power Energy Syst. 2012, 43, 630–639. [Google Scholar] [CrossRef]
- Chakeri, V.; Tarafdar Hagh, M. Optimal allocation of the distributed active filters based on total loss reduction. Int. J. Smart Electr. Eng. 2017, 6, 171–175. [Google Scholar]
- El-Arwash, H.M.; Azmy, A.M.; Rashad, E.M. A GA-based initialization of PSO for optimal APFS allocation in water desalination plant. In Proceedings of the 2017 Nineteenth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 19–21 December 2017; pp. 1378–1384. [Google Scholar]
- Moghbel, M.; Masoum, M.A.S.; Fereidouni, A.; Deilami, S. Optimal sizing, siting and operation of custom power devices with STATCOM and APLC functions for real-time reactive power and network voltage quality control of smart grid. IEEE Trans. Smart Grid 2018, 9, 5564–5575. [Google Scholar] [CrossRef]
- Yang, Z.; Zhuo, F.; Tao, R.; Zhang, Z.; Yi, H.; Wang, M.; Zhu, C. Implementation of multi-objective particle swarm optimization in distribution network for high-efficiency allocation and sizing of SAPFs. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–5. [Google Scholar]
- Alhaddad, F.M.; El-Hawary, M. Optimal filter placement and sizing using ant colony optimization in electrical distribution system. In Proceedings of the 2014 IEEE Electrical Power and Energy Conference, Calgary, AB, Canada, 12–14 November 2014; pp. 128–133. [Google Scholar]
- Farhoodnea, M.; Mohamed, A.; Shareef, H.; Zayandehroodi, H. Optimum placement of active power conditioners by a dynamic discrete firefly algorithm to mitigate the negative power quality effects of renewable energy-based generators. Int. J. Electr. Power Energy Syst. 2014, 61, 305–317. [Google Scholar] [CrossRef]
- Lakum, A.; Mahajan, V. A novel approach for optimal placement and sizing of active power filters in radial distribution system with nonlinear distributed generation using adaptive grey wolf optimizer. Eng. Sci. Technol. Int. J. 2021, 24, 911–924. [Google Scholar] [CrossRef]
- Grady, W.M.; Samotyj, M.J.; Noyola, A.H. Minimizing network harmonic voltage distortion with an active power line conditioner. IEEE Trans. Power Deliv. 1991, 6, 1690–1697. [Google Scholar] [CrossRef]
- Klimas, M.; Grabowski, D.; Buła, D. Application of decision trees for optimal allocation of harmonic filters in medium-voltage networks. Energies 2021, 14, 1173. [Google Scholar] [CrossRef]
- Geoffrion, A.M. Generalized benders decomposition. J. Optim. Theory Appl. 1972, 10, 237–260. [Google Scholar] [CrossRef]
- Amjady, N.; Soleymanpour, H.R. Daily hydrothermal generation scheduling by a new modified adaptive particle swarm optimization technique. Electr. Power Syst. Res. 2010, 80, 723–732. [Google Scholar] [CrossRef]
- Atashpaz-Gargari, E.; Lucas, C. Imperialist competitive algorithm: An algorithm for optimization inspired by imperialistic competition. In Proceedings of the 2007 IEEE Congress on Evolutionary Computation, Singapore, 25–28 September 2007; pp. 4661–4667. [Google Scholar]
- Teng, J.H. A network-topology based three: Phase load flow for distribution systems. Proc. Natl. Sci. Counc. ROC A Phys. Sci. Eng. 2000, 24, 259–264. [Google Scholar]
- Teng, J.-H.; Chang, C.-Y. Backward/Forward sweep-based harmonic analysis method for distribution systems. IEEE Trans. Power Deliv. 2007, 22, 1665–1672. [Google Scholar] [CrossRef]
- Rashedi, E.; Nezamabadi-pour, H.; Saryazdi, S. GSA: A gravitational search algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. On the performance of artificial bee colony (ABC) algorithm. Appl. Soft Comput. 2008, 8, 687–697. [Google Scholar] [CrossRef]
- El-Fergany, A.A. Optimal capacitor allocations using evolutionary algorithms. IET Gener.Trans. Distrib. 2013, 7, 593–601. [Google Scholar] [CrossRef]
- Kow, K.W.; Wong, Y.W.; Rajkumar, R.K.; Rajkumar, R.K. A review on performance of artificial intelligence and conventional method in mitigating PV grid-tied related power quality events. Renew. Sustain. Energy Rev. 2016, 56, 334–346. [Google Scholar] [CrossRef]
- Eslami, A.; Negnevitsky, M.; Franklin, E.; Lyden, S. Review of AI applications in harmonic analysis in power systems. Renew. Sustain. Energy Rev. 2022, 154, 111897. [Google Scholar] [CrossRef]
- Chang, Y.-P.; Low, C. Optimization of a passive harmonic filter based on the neural-genetic algorithm with fuzzy logic for a steel manufacturing plant. Expert Syst. Appl. 2008, 34, 2059–2070. [Google Scholar] [CrossRef]
- Quinlan, J.R. Simplifying decision trees. Int. J. Man-Mach. Stud. 1987, 27, 221–234. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Shunt APF | Series APF | UPQC |
|---|---|---|---|
| Current harmonic reduction | • | ○ | • |
| Voltage harmonic reduction | ○ | • | • |
| Reactive power compensation | • | • | |
| Voltage flicker reduction | ○ | • | • |
| Removing voltage swells, sags | ○ | • | • |
| Improving load balancing | • | • | |
| Neutral current compensation | • | • |
| Method | Goal functions | Constraints | Type | References | |
|---|---|---|---|---|---|
| Classical | combinatorial | 9 | A, D | S | [125] |
| 3a | A | S | [125] | ||
| 5e | E | S | [126] | ||
| 1a | E | S | [127] | ||
| 1g | E | S | [128] | ||
| 1g, 4a | C, E | M | [124] | ||
| iterative | 1a, 3a | A, D, E | M | [129] | |
| 4a, 5a | M | [130] | |||
| 3a | S | [131] | |||
| 3a | A, E | S | [131] | ||
| 1a, 1b, 1c, 1d, 1g, 5e | A, B, D, E | S | [132] | ||
| 1a, 5f | A, E | S | [133] | ||
| 1g, 4b, 5b, 6, 8b | D, E | M | [134,135] | ||
| Metaheuristic | Evolutionary algorithms | 1a | C, D, E | S | [136] |
| 3a | A | S | [111] | ||
| 1a | A, C, D, E | S | [111] | ||
| 5c | S | [137] | |||
| 1a, 5d | M | [112] | |||
| 1a, 4a, 5d, e8, ab | M | [113] | |||
| 1g | A, B, D, E | S | [128] | ||
| 1g | A, E | S | [138] | ||
| 1g, 2, 4b | D, E | M | [139] | ||
| 5f | A, D, E | S | [140] | ||
| 1f, 4b | E | M | [123] | ||
| fuzzy | 1a | A, C, D, E | S | [114] | |
| 1e, 4b, 5f, 5g | A, C, D, E, F, G | M | [141] | ||
| 1e + 1c | A, C, D, E | S | [131] | ||
| human | 1e | A, D, E | S | [142] | |
| 1a, 4a, 5f, 7 | A, C, D, E | M | [115] | ||
| swarm-PSO | 1a, 4a, 5f, 7 | A, D, E | M | [116] | |
| 1e | C, D, E | S | [143] | ||
| 4a, 4c | D, E | M | [144] | ||
| 1a, 4a, 5f, 7 | A, E | M | [145] | ||
| 1a, 5f | A, D, E | M | [146] | ||
| 1a, 5f, 9 | E | M | [147] | ||
| 1e | A, D, E | S | [122] | ||
| swarm-other | 1a, 5d | M | [117] | ||
| 4a | D, E | S | [148] | ||
| 1f, 3b, 5f | A, E | M | [149] | ||
| 1a | A, D, E | S | [118,119,120] | ||
| 1e | A, D, E | S | [150] | ||
| Test System Size | References |
|---|---|
| 4-bus | [112,113,117] |
| 5-bus | [114] |
| 6-bus | [120] |
| 7-bus, 9-bus | [125] |
| 11-bus | [137] |
| 13-bus | [148] |
| 15-bus | [146] |
| 16-bus | [149] |
| 17-bus | [126,127,128,132,133,134,135,152] |
| 18-bus | [111,114,115,116,121,129,131,141,143,147] |
| 19-bus | [145] |
| 20-bus | [124,140,142] |
| 23-bus | [136] |
| 25-bus | [139] |
| 30-bus | [116] |
| 33-bus | [118,119,120,121,122] |
| 37-bus | [144] |
| 69-bus | [122,123,150] |
| 95-bus | [123] |
| 119-bus | [123] |
| 123-bus | [139] |
| 445-bus | [138] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Buła, D.; Grabowski, D.; Maciążek, M. A Review on Optimization of Active Power Filter Placement and Sizing Methods. Energies 2022, 15, 1175. https://doi.org/10.3390/en15031175
Buła D, Grabowski D, Maciążek M. A Review on Optimization of Active Power Filter Placement and Sizing Methods. Energies. 2022; 15(3):1175. https://doi.org/10.3390/en15031175
Chicago/Turabian StyleBuła, Dawid, Dariusz Grabowski, and Marcin Maciążek. 2022. "A Review on Optimization of Active Power Filter Placement and Sizing Methods" Energies 15, no. 3: 1175. https://doi.org/10.3390/en15031175
APA StyleBuła, D., Grabowski, D., & Maciążek, M. (2022). A Review on Optimization of Active Power Filter Placement and Sizing Methods. Energies, 15(3), 1175. https://doi.org/10.3390/en15031175