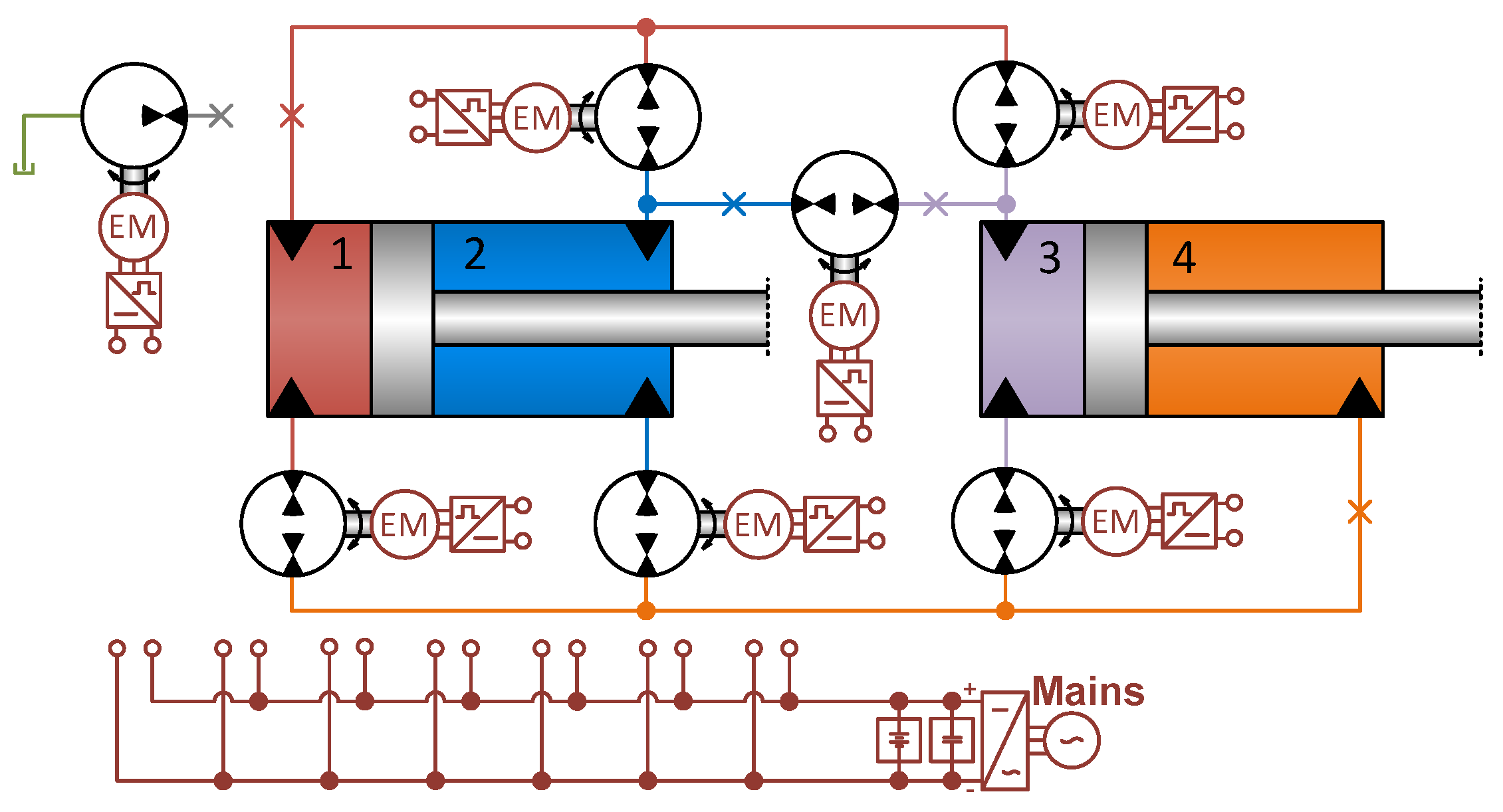
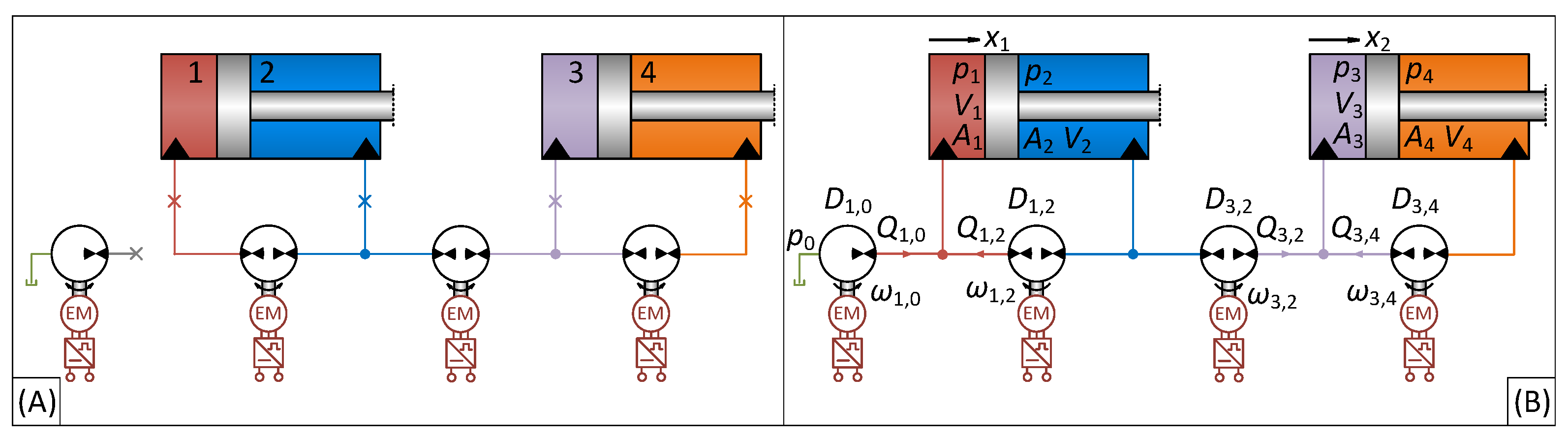
Figure 1.
Electro-hydraulic variable-speed drive network in dual cylinder system with VsD interconnections between all four chambers. Here, × marks possible points at which VsD(s) can be connected to link the system to a reservoir.
Figure 1.
Electro-hydraulic variable-speed drive network in dual cylinder system with VsD interconnections between all four chambers. Here, × marks possible points at which VsD(s) can be connected to link the system to a reservoir.
Figure 2.
Examples of basic data communication networks.
Figure 2.
Examples of basic data communication networks.
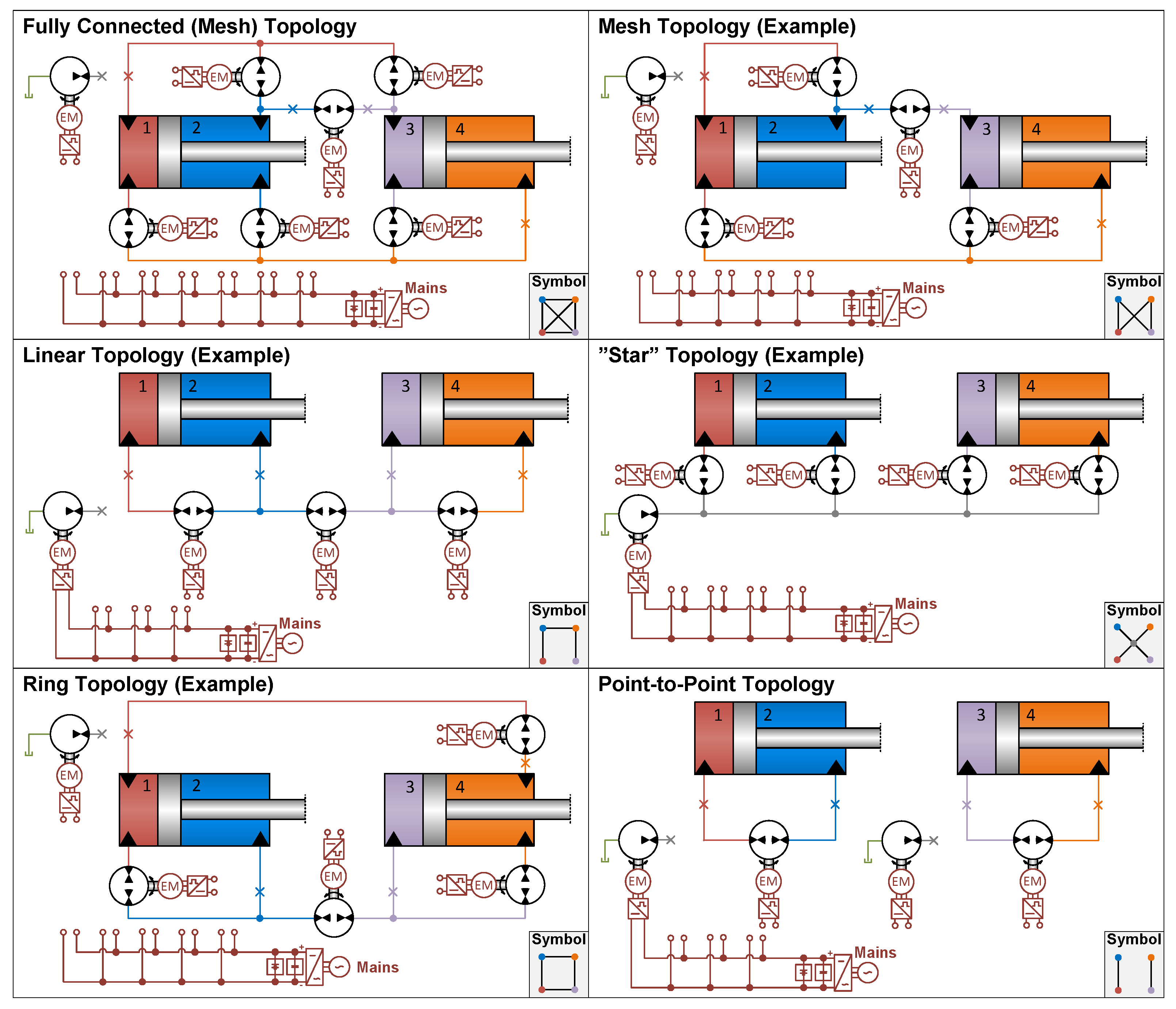
Figure 3.
Basic electro-hydraulic variable-speed drive network topologies for a dual cylinder system.
Figure 3.
Basic electro-hydraulic variable-speed drive network topologies for a dual cylinder system.
Figure 4.
Examples of electro-hydraulic variable-speed drive network topologies in case of shared chambers.
Figure 4.
Examples of electro-hydraulic variable-speed drive network topologies in case of shared chambers.
Figure 5.
Hydraulically actuated crane used for case study.
Figure 5.
Hydraulically actuated crane used for case study.
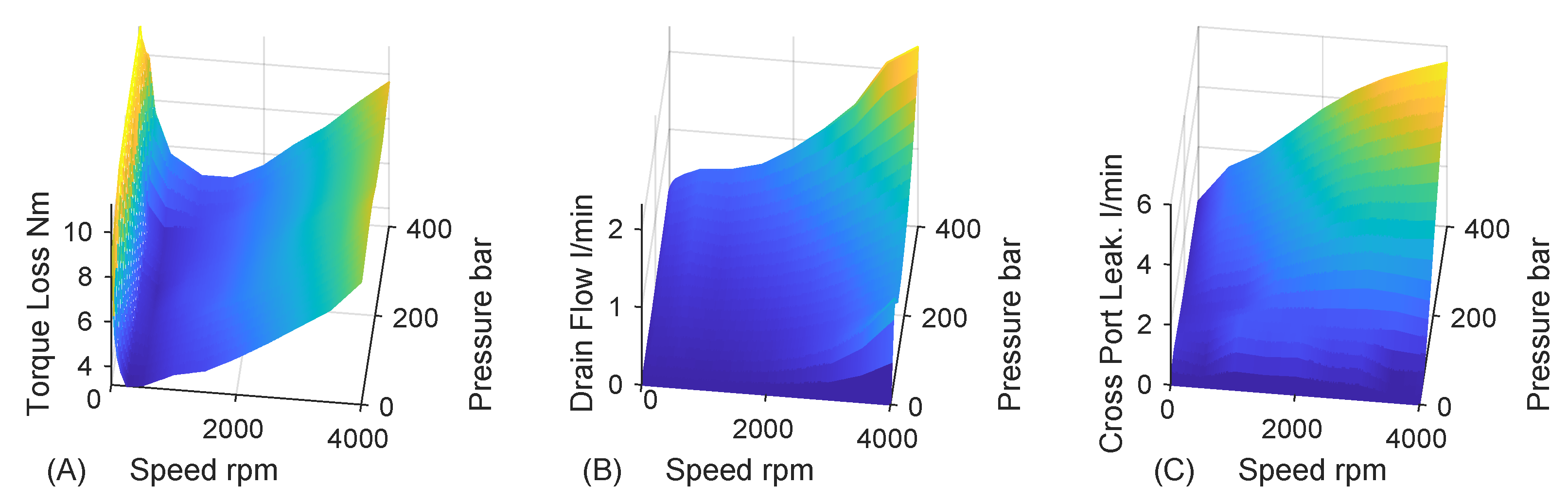
Figure 6.
Losses estimated from [
59] with
ccm. (
A) A4FM torque loss; (
B) A4FM drain flow; (
C) A4FM cross port leakage flow.
Figure 6.
Losses estimated from [
59] with
ccm. (
A) A4FM torque loss; (
B) A4FM drain flow; (
C) A4FM cross port leakage flow.
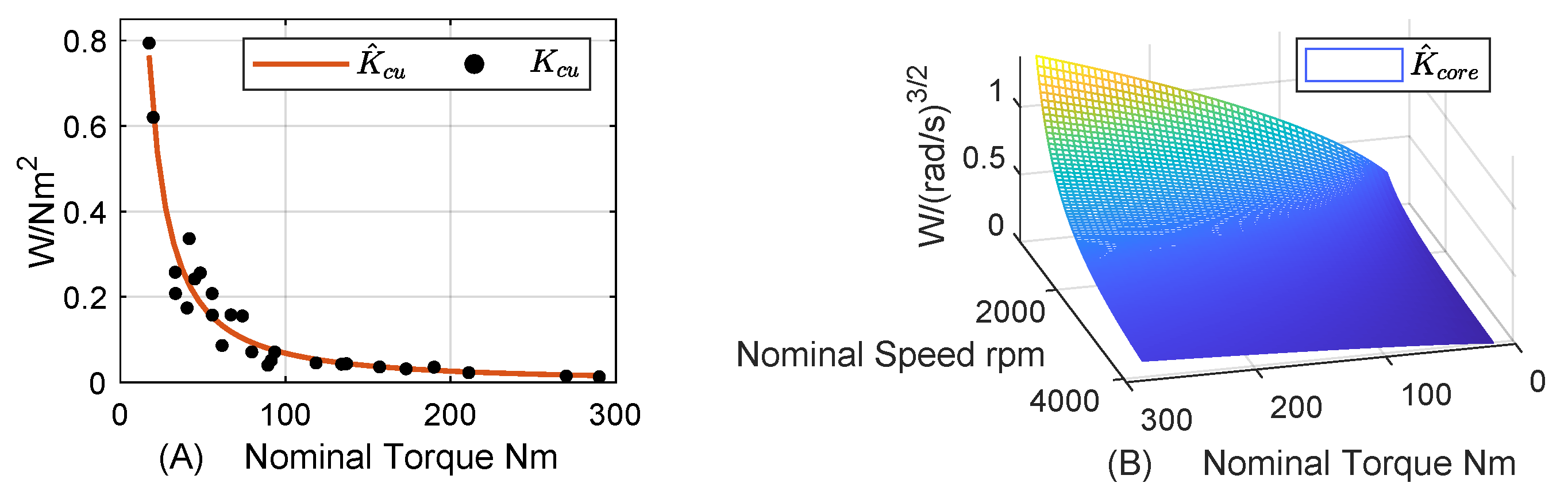
Figure 7.
(A) Water cooled MS2N copper loss coefficient; (B) water cooled MS2N core loss coefficient with .
Figure 7.
(A) Water cooled MS2N copper loss coefficient; (B) water cooled MS2N core loss coefficient with .
Figure 8.
(A) Total efficiency of the reference VsD, from inverter inlet to hydraulic outlet; (B) displacement unit efficiency; (C) electric motor efficiency; (D) inverter efficiency.
Figure 8.
(A) Total efficiency of the reference VsD, from inverter inlet to hydraulic outlet; (B) displacement unit efficiency; (C) electric motor efficiency; (D) inverter efficiency.
Figure 9.
(A) Point-to-point VDN topology; (B) specific interconnection scheme with 0 ↔ 1 and with 0 ↔ 3.
Figure 9.
(A) Point-to-point VDN topology; (B) specific interconnection scheme with 0 ↔ 1 and with 0 ↔ 3.
Figure 10.
Schematic for VDN-PP with interconnection scheme 0 ↔ 1, 0 ↔ 3.
Figure 10.
Schematic for VDN-PP with interconnection scheme 0 ↔ 1, 0 ↔ 3.
Figure 11.
(A) Example of interconnection scheme for linear VDN topology; (B) specific interconnection scheme 1 ↔ 2 ↔ 3 ↔ 4, 0 ↔ 1 for linear VDN topology.
Figure 11.
(A) Example of interconnection scheme for linear VDN topology; (B) specific interconnection scheme 1 ↔ 2 ↔ 3 ↔ 4, 0 ↔ 1 for linear VDN topology.
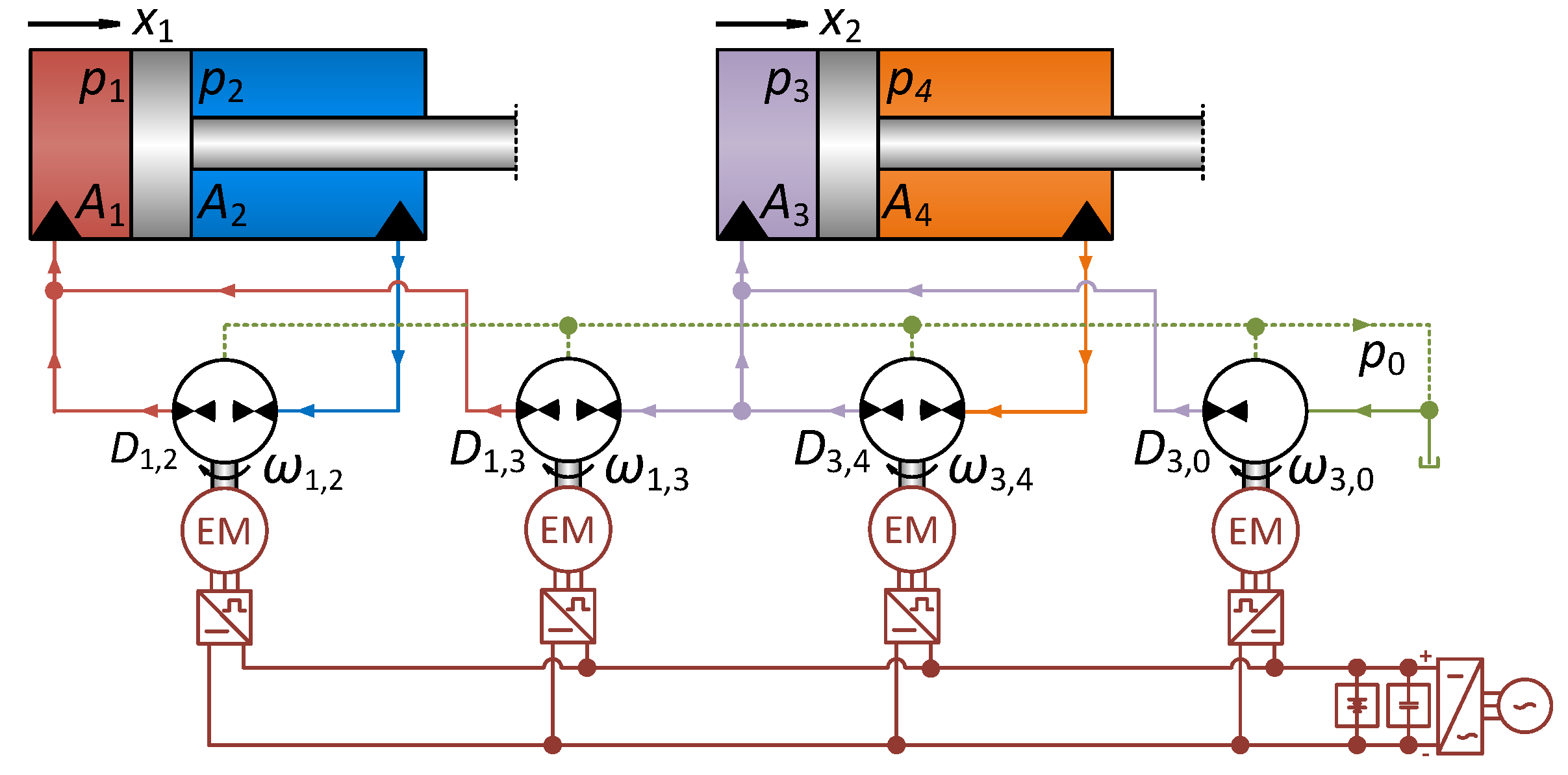
Figure 12.
Schematic for VDN-L with interconnection scheme 2 ↔ 1 ↔ 3 ↔ 4, 0 ↔ 3.
Figure 12.
Schematic for VDN-L with interconnection scheme 2 ↔ 1 ↔ 3 ↔ 4, 0 ↔ 3.
Figure 13.
(A) Example of interconnection scheme for linear VDN topology; (B) specific interconnection scheme 0 ↔ 1 ↔ 23 ↔ 4 for linear VDN topology with shared chambers.
Figure 13.
(A) Example of interconnection scheme for linear VDN topology; (B) specific interconnection scheme 0 ↔ 1 ↔ 23 ↔ 4 for linear VDN topology with shared chambers.
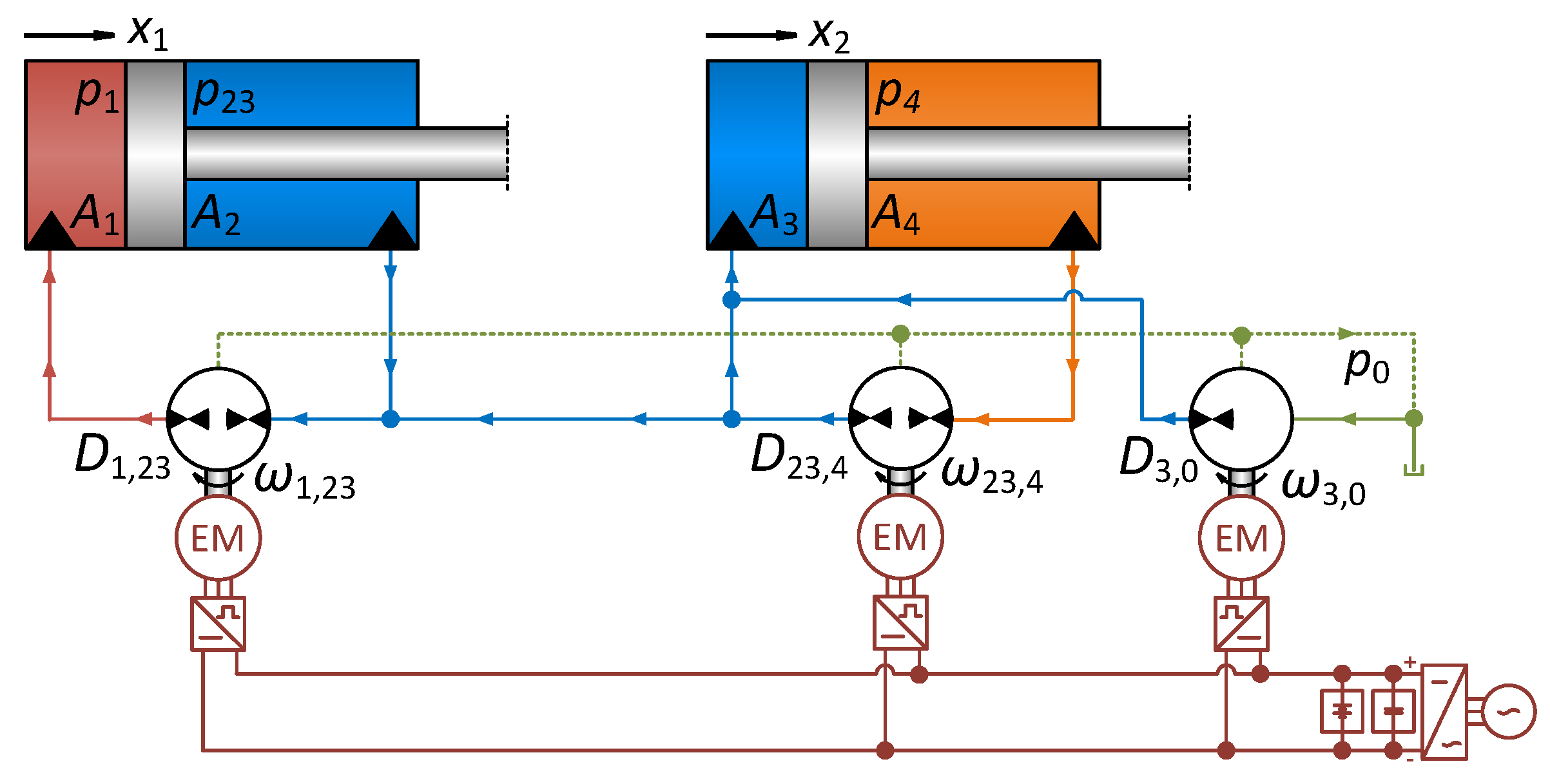
Figure 14.
Schematic for VDN-L with interconnection scheme 2 ↔ 1 ↔ 3 ↔ 4, 0 ↔ 3.
Figure 14.
Schematic for VDN-L with interconnection scheme 2 ↔ 1 ↔ 3 ↔ 4, 0 ↔ 3.
Figure 15.
System control structure for VDN-PP actuated crane. The control structures for the VDN-L and VDN-LS appear in a similar way. Note that reference for a variable •.
Figure 15.
System control structure for VDN-PP actuated crane. The control structures for the VDN-L and VDN-LS appear in a similar way. Note that reference for a variable •.
Figure 16.
(A,D) Closed loop frequency responses for VDN-PP in crane application. (B,E) closed loop frequency responses for VDN-L in crane application; (C,F) closed loop frequency responses for VDN-LS in crane application. All responses are evaluated at mid-strokes.
Figure 16.
(A,D) Closed loop frequency responses for VDN-PP in crane application. (B,E) closed loop frequency responses for VDN-L in crane application; (C,F) closed loop frequency responses for VDN-LS in crane application. All responses are evaluated at mid-strokes.
Figure 17.
Valve actuated crane application with separate metering supplied by variable-speed displacement unit, and associated efficiency under payload retraction, mm/s. Under payload extension, the efficiency is zero as this is a load aiding situation.
Figure 17.
Valve actuated crane application with separate metering supplied by variable-speed displacement unit, and associated efficiency under payload retraction, mm/s. Under payload extension, the efficiency is zero as this is a load aiding situation.
Figure 18.
Efficiency for VDN-PP in crane application with interconnection scheme 0 ↔ 1 and 0 ↔ 3. (A) Total efficiency under payload extension, mm/s; (B) total efficiency under payload retraction, mm/s. , , , , corresponds to the mean displacement unit, motor, inverter, total efficiencies, and maximum total efficiency.
Figure 18.
Efficiency for VDN-PP in crane application with interconnection scheme 0 ↔ 1 and 0 ↔ 3. (A) Total efficiency under payload extension, mm/s; (B) total efficiency under payload retraction, mm/s. , , , , corresponds to the mean displacement unit, motor, inverter, total efficiencies, and maximum total efficiency.
Figure 19.
Efficiency for VDN-L in crane application with interconnection scheme 2 ↔ 1 ↔ 3 ↔ 4, 0 ↔ 3. (A) total efficiency under payload extension, mm/s; (B) total efficiency under payload retraction, mm/s. , , , , corresponds to the mean displacement unit, motor, inverter, total efficiencies and maximum total efficiency.
Figure 19.
Efficiency for VDN-L in crane application with interconnection scheme 2 ↔ 1 ↔ 3 ↔ 4, 0 ↔ 3. (A) total efficiency under payload extension, mm/s; (B) total efficiency under payload retraction, mm/s. , , , , corresponds to the mean displacement unit, motor, inverter, total efficiencies and maximum total efficiency.
Figure 20.
Efficiency for VDN-LS in crane application with interconnection scheme 1 ↔ 23 ↔ 4 and 0 ↔ 23. (A) total efficiency under payload extension, mm/s; (B) total efficiency under payload retraction, mm/s. , , , , corresponds to the mean displacement unit, motor, inverter, total efficiencies, and maximum total efficiency.
Figure 20.
Efficiency for VDN-LS in crane application with interconnection scheme 1 ↔ 23 ↔ 4 and 0 ↔ 23. (A) total efficiency under payload extension, mm/s; (B) total efficiency under payload retraction, mm/s. , , , , corresponds to the mean displacement unit, motor, inverter, total efficiencies, and maximum total efficiency.
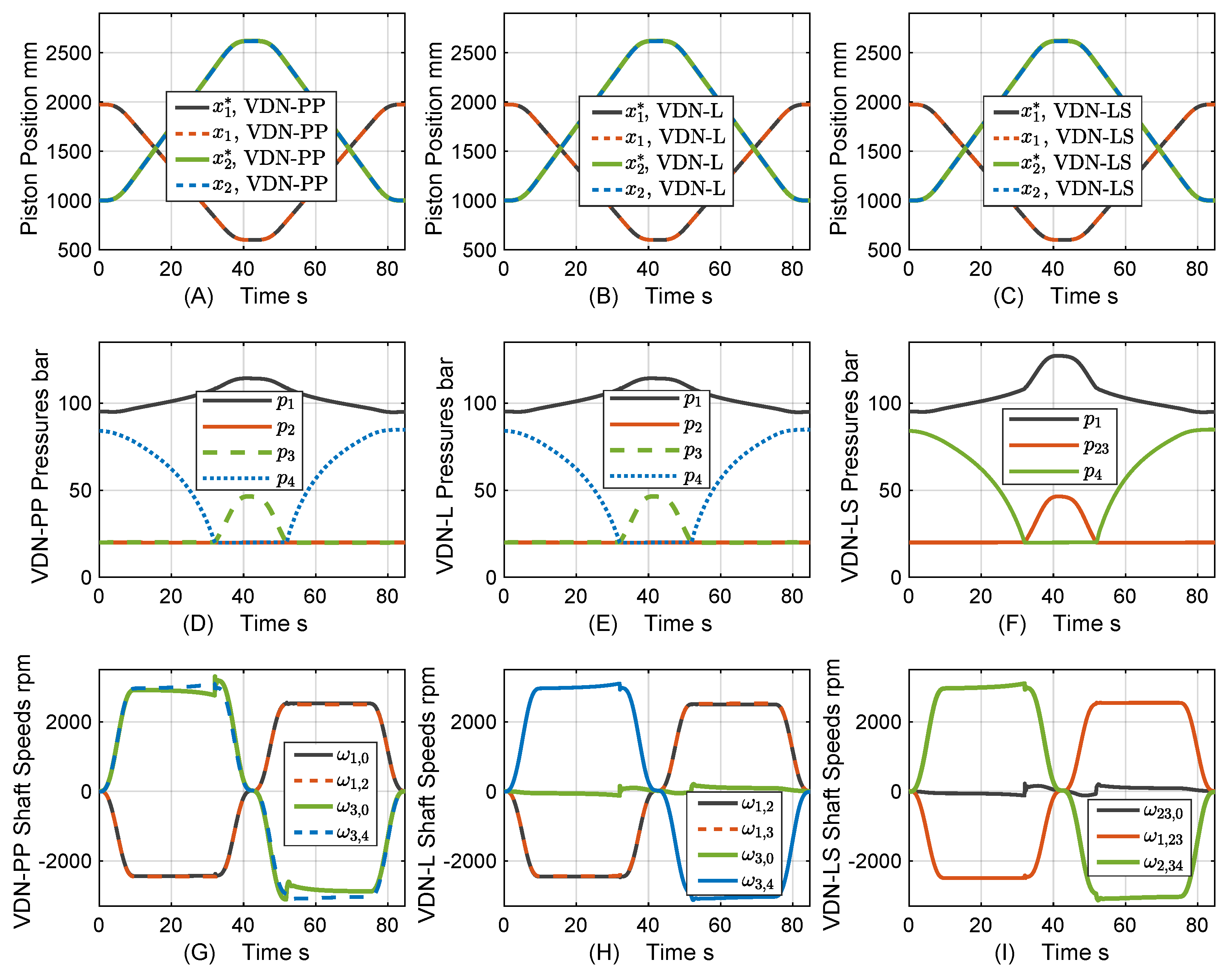
Figure 21.
(A) Reference and actual cylinder positions for VDN-PP case; (B) reference and actual cylinder positions for VDN-L case; (C) reference and actual cylinder positions for the VDN-LS case; (D) chamber pressures for the VDN-PP case; (E) chamber pressures for the VDN-L case; (F) Chamber pressures for the VDN-LS case; (G) VsD shaft speeds for the VDN-PP case; (H) VsD shaft speeds for the VDN-L case; (I) the VsD shaft speeds for the VDN-LS case.
Figure 21.
(A) Reference and actual cylinder positions for VDN-PP case; (B) reference and actual cylinder positions for VDN-L case; (C) reference and actual cylinder positions for the VDN-LS case; (D) chamber pressures for the VDN-PP case; (E) chamber pressures for the VDN-L case; (F) Chamber pressures for the VDN-LS case; (G) VsD shaft speeds for the VDN-PP case; (H) VsD shaft speeds for the VDN-L case; (I) the VsD shaft speeds for the VDN-LS case.
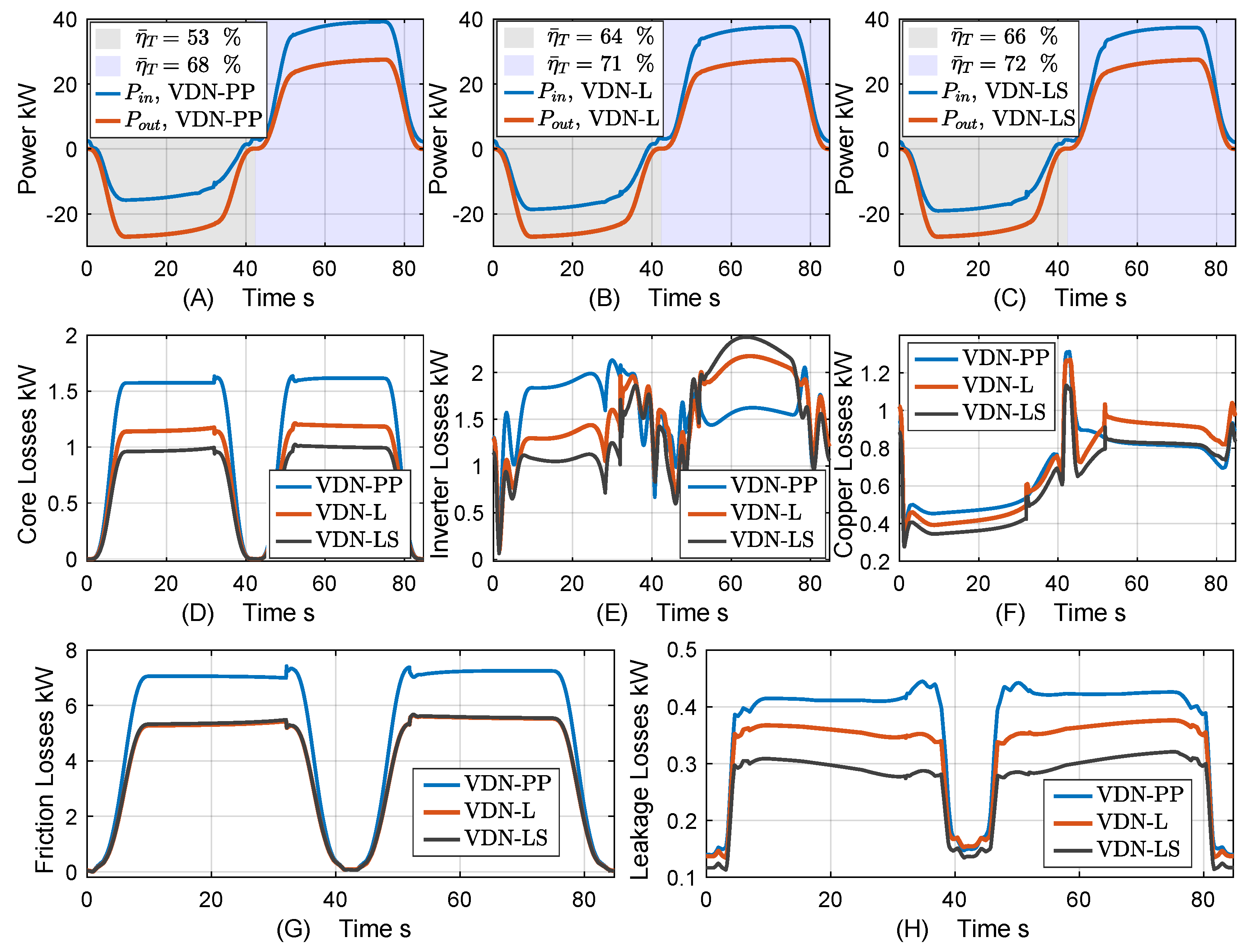
Figure 22.
(A) Input and output power of VDN with point-to-point topology; (B) input and output power of VDN with linear topology; (C) input and output power of VDN with linear topology with shared chambers; (D) VDN core losses; (E) VDN inverter losses; (F) VDN copper losses; (G) VDN friction losses; (H) VDN leakage losses.
Figure 22.
(A) Input and output power of VDN with point-to-point topology; (B) input and output power of VDN with linear topology; (C) input and output power of VDN with linear topology with shared chambers; (D) VDN core losses; (E) VDN inverter losses; (F) VDN copper losses; (G) VDN friction losses; (H) VDN leakage losses.
Table 1.
Necessary displacements in crane application for different interconnection schemes with VDN-PP topology. The blue colored case marks the scheme with the lowest displacement sum and the red colored case marks the scheme with the highest displacement sum.
Table 1.
Necessary displacements in crane application for different interconnection schemes with VDN-PP topology. The blue colored case marks the scheme with the lowest displacement sum and the red colored case marks the scheme with the highest displacement sum.
| Configuration | 0 ↔ 1 & 0 ↔ 3 | 0 ↔ 2 & 0 ↔ 4 | 0 ↔ 1 & 0 ↔ 4 | 0 ↔ 2 & 0 ↔ 3 |
|---|
| [ccm] | [ccm] | [ccm] | [ccm] |
|---|
| 1 ↔ 2 & 3 ↔ 4 | 32, 31, 26, 24 | 32, 62, 26, 50 | 32, 31, 26, 50 | 32, 62, 26, 24 |
Table 2.
Maximum shaft torques resulting from cylinder loads, lower pressure level, and necessary displacements for different interconnection schemes with VDN-PP topology. The Blue colored case marks the scheme with the lowest torque sum and the red colored case marks the scheme with the highest torque sum.
Table 2.
Maximum shaft torques resulting from cylinder loads, lower pressure level, and necessary displacements for different interconnection schemes with VDN-PP topology. The Blue colored case marks the scheme with the lowest torque sum and the red colored case marks the scheme with the highest torque sum.
| Configuration | 0 ↔ 1 & 0 ↔ 3 | 0 ↔ 2 & 0 ↔ 4 | 0 ↔ 1 & 0 ↔ 4 | 0 ↔ 2 & 0 ↔ 3 |
|---|
| [Nm] | [Nm] | [Nm] | [Nm] |
|---|
| 1 ↔ 2 & 3 ↔ 4 | 67, 56, 38, 57 | 10, 111, 70, 118 | 67, 56, 70, 118 | 10, 111, 38, 57 |
Table 3.
Possible chamber interconnection schemes of VDN with linear topology in dual cylinder crane application. Blue colored combinations represent redundant interconnection schemes.
Table 3.
Possible chamber interconnection schemes of VDN with linear topology in dual cylinder crane application. Blue colored combinations represent redundant interconnection schemes.
| 1↔2↔3↔4 | 1↔3↔2↔4 | 1↔2↔4↔3 | 1↔4↔3↔2 | 1↔3↔4↔2 | 1↔4↔2↔3 |
| 2↔1↔3↔4 | 2↔3↔1↔4 | 2↔1↔4↔3 | 2↔4↔1↔3 | 2↔3↔4↔1 | 2↔4↔3↔1 |
| 3↔1↔2↔4 | 3↔2↔1↔4 | 3↔1↔4↔2 | 3↔4↔1↔2 | 3↔2↔4↔1 | 3↔4↔2↔1 |
| 4↔1↔2↔3 | 4↔2↔1↔3 | 4↔1↔3↔2 | 4↔3↔1↔2 | 4↔2↔3↔1 | 4↔3↔2↔1 |
Table 4.
Necessary displacements for linear VDN topology interconnection schemes in crane application. The Blue colored case marks the scheme with the lowest displacement sum and the red colored cases mark the scheme with the highest displacement sum.
Table 4.
Necessary displacements for linear VDN topology interconnection schemes in crane application. The Blue colored case marks the scheme with the lowest displacement sum and the red colored cases mark the scheme with the highest displacement sum.
| Configuration | 0 ↔ 1 | 0 ↔ 2 | 0 ↔ 3 | 0 ↔ 4 |
|---|
| [ccm] | [ccm] | [ccm] | [ccm] |
|---|
| 1 ↔ 2 ↔ 3 ↔ 4 | 58, 57, 26, 24 | 58, 62, 26, 24 | 58, 62, 32, 24 | 57, 62, 32, 81 |
| 1 ↔ 3 ↔ 2 ↔ 4 | 58, 54, 57, 24 | 58, 112, 62, 24 | 58, 54, 62, 24 | 57, 111, 62, 81 |
| 1 ↔ 2 ↔ 4 ↔ 3 | 58, 57, 26, 50 | 58, 62, 26, 50 | 58, 62, 32, 57 | 57, 62, 32, 50 |
| 1 ↔ 4 ↔ 3 ↔ 2 | 58, 31, 57, 80 | 58, 88, 62, 86 | 58, 31, 62, 86 | 57, 31, 62, 80 |
| 1 ↔ 3 ↔ 4 ↔ 2 | 58, 31, 57, 54 | 58, 88, 62, 112 | 58, 31, 62, 54 | 57, 31, 62, 111 |
| 1 ↔ 4 ↔ 2 ↔ 3 | 58, 80, 50, 57 | 58, 86, 50, 62 | 58, 86, 57, 62 | 57, 80, 50, 62 |
| 2 ↔ 1 ↔ 3 ↔ 4 | 58, 31, 26, 24 | 58, 88, 26, 24 | 58, 31, 32, 24 | 57, 31, 32, 81 |
| 2 ↔ 3 ↔ 1 ↔ 4 | 58, 31, 80, 24 | 58, 88, 86, 24 | 58, 31, 86, 24 | 57, 31, 80, 81 |
| 2 ↔ 1 ↔ 4 ↔ 3 | 58, 31, 26, 50 | 58, 88, 26, 50 | 58, 31, 32, 57 | 57, 31, 32, 50 |
| 2 ↔ 4 ↔ 1 ↔ 3 | 58, 50, 54, 31 | 58, 50, 112, 88 | 58, 57, 54, 31 | 57, 50, 111, 31 |
| 3 ↔ 1 ↔ 2 ↔ 4 | 58, 54, 50, 24 | 58, 112, 50, 24 | 58, 54, 57, 24 | 57, 111, 50, 81 |
| 3 ↔ 2 ↔ 1 ↔ 4 | 58, 50, 80, 24 | 58, 50, 86, 24 | 58, 57, 86, 24 | 57, 50, 80, 81 |
Table 5.
Maximum shaft torques for linear VDN topology interconnection schemes in crane application. The Blue colored case marks the scheme with the lowest torque sum and the red colored cases mark the schemes with the highest torque sum.
Table 5.
Maximum shaft torques for linear VDN topology interconnection schemes in crane application. The Blue colored case marks the scheme with the lowest torque sum and the red colored cases mark the schemes with the highest torque sum.
| Configuration | 0 ↔ 1 | 0 ↔ 2 | 0 ↔ 3 | 0 ↔ 4 |
|---|
| [Nm] | [Nm] | [Nm] | [Nm] |
|---|
| 1 ↔ 2 ↔ 3 ↔ 4 | 120, 100, 30, 57 | 18, 111, 30, 57 | 84, 111, 37, 57 | 152, 111, 37, 191 |
| 1 ↔ 3 ↔ 2 ↔ 4 | 120, 62, 82, 57 | 18, 128, 91, 57 | 84, 62, 91, 57 | 152, 128, 91, 191 |
| 1 ↔ 2 ↔ 4 ↔ 3 | 120, 100, 61, 118 | 18, 111, 61, 118 | 84, 111, 75, 132 | 152, 111, 75, 118 |
| 1 ↔ 4 ↔ 3 ↔ 2 | 120, 36, 100, 188 | 18, 102, 111, 203 | 84, 36, 111, 203 | 152, 36, 111, 188 |
| 1 ↔ 3 ↔ 4 ↔ 2 | 120, 73, 82, 127 | 18, 207, 91, 261 | 84, 73, 91, 127 | 152, 73, 91, 261 |
| 1 ↔ 4 ↔ 2 ↔ 3 | 120, 188, 58, 100 | 18, 203, 58, 111 | 84, 203, 65, 111 | 152, 188, 58, 111 |
| 2 ↔ 1 ↔ 3 ↔ 4 | 120, 56, 38, 57 | 18, 158, 38, 57 | 84, 56, 47, 57 | 152, 56, 47, 191 |
| 2 ↔ 3 ↔ 1 ↔ 4 | 120, 36, 118, 43 | 18, 102, 127, 43 | 84, 36, 127, 43 | 152, 36, 118, 145 |
| 2 ↔ 1 ↔ 4 ↔ 3 | 120, 56, 47, 118 | 18, 158, 47, 118 | 84, 56, 57, 132 | 152, 56, 57, 118 |
| 2 ↔ 4 ↔ 1 ↔ 3 | 120, 74, 97, 73 | 18, 74, 199, 207 | 84, 82, 97, 73 | 152, 74, 199, 73 |
| 3 ↔ 1 ↔ 2 ↔ 4 | 120, 97, 74, 57 | 18, 199, 74, 57 | 84, 97, 82, 57 | 152, 199, 74, 191 |
| 3 ↔ 2 ↔ 1 ↔ 4 | 120, 58, 143, 43 | 18, 58, 154, 43 | 84, 65, 154, 43 | 152, 58, 143, 145 |
Table 6.
Possible chamber interconnection schemes of VDN with linear topology and shared chambers in dual cylinder crane application. Blue colored combinations represent redundant interconnection schemes.
Table 6.
Possible chamber interconnection schemes of VDN with linear topology and shared chambers in dual cylinder crane application. Blue colored combinations represent redundant interconnection schemes.
| 13↔2↔4 | 13↔4↔2 | 2↔13↔4 | 1↔23↔4 | 23↔4↔1 | 23↔1↔4 |
| 14↔2↔3 | 14↔3↔2 | 2↔14↔3 | 24↔1↔3 | 24↔3↔1 | 1↔24↔3 |
| 4↔2↔13 | 2↔4↔13 | 4↔13↔2 | 4↔23↔1 | 1↔4↔23 | 4↔1↔23 |
| 3↔2↔14 | 2↔3↔14 | 3↔14↔2 | 3↔1↔24 | 1↔3↔24 | 3↔24↔1 |
Table 7.
Necessary displacements for linear VDN topology interconnection schemes with shared chambers in crane application. The Blue colored cases mark the schemes with displacement sums below 150 [ccm] and the red colored case marks the scheme with the highest displacement sum.
Table 7.
Necessary displacements for linear VDN topology interconnection schemes with shared chambers in crane application. The Blue colored cases mark the schemes with displacement sums below 150 [ccm] and the red colored case marks the scheme with the highest displacement sum.
| Configuration | 0 ↔ 13 | 0 ↔ 2 | 0 ↔ 4 |
|---|
| 13 ↔ 2 ↔ 4 | 54, 58, 24 [ccm] | 112, 58, 24 [ccm] | 112, 58, 81 [ccm] |
| 13 ↔ 4 ↔ 2 | 54, 58, 31 [ccm] | 112, 58, 88 [ccm] | 112, 58, 31 [ccm] |
| 2 ↔ 13↔ 4 | 31, 58, 24 [ccm] | 88, 58, 24 [ccm] | 31, 58, 81 [ccm] |
| Configuration | 0 ↔ 14 | 0 ↔ 2 | 0 ↔ 3 |
| 14 ↔ 2 ↔ 3 | 80, 58, 50 [ccm] | 86, 58, 50 [ccm] | 86, 58, 57 [ccm] |
| 14 ↔ 3 ↔ 2 | 80, 58, 31 [ccm] | 86, 58, 88 [ccm] | 86, 58, 31 [ccm] |
| 2 ↔ 14 ↔ 3 | 31, 58, 50 [ccm] | 88, 58, 50 [ccm] | 31, 58, 57 [ccm] |
| Configuration | 0 ↔ 23 | 0 ↔ 1 | 0 ↔ 4 |
| 23 ↔ 1 ↔ 4 | 86, 58, 24 [ccm] | 80, 58, 24 [ccm] | 80, 58, 81 [ccm] |
| 23 ↔ 4 ↔ 1 | 86, 58, 62 [ccm] | 80, 58, 57 [ccm] | 80, 58, 62 [ccm] |
| 1 ↔ 23 ↔ 4 | 62, 58, 24 [ccm] | 57, 58, 24 [ccm] | 62, 58, 81 [ccm] |
| Configuration | 0 ↔ 24 | 0 ↔ 1 | 0 ↔ 3 |
| 24 ↔ 1 ↔ 3 | 112, 58, 50 [ccm] | 54, 58, 50 [ccm] | 54, 58, 57 [ccm] |
| 24 ↔ 3 ↔ 1 | 112, 58, 62 [ccm] | 54, 58, 57 [ccm] | 54, 58, 62 [ccm] |
| 1 ↔ 24 ↔ 3 | 62, 58, 50 [ccm] | 57, 58, 50 [ccm] | 62, 58, 57 [ccm] |
Table 8.
Maximum shaft torques for linear VDN topology interconnection schemes with shared chambers in crane application. The Blue colored case marks the scheme with lowest torque sum and the red colored case marks the scheme with the highest torque sum.
Table 8.
Maximum shaft torques for linear VDN topology interconnection schemes with shared chambers in crane application. The Blue colored case marks the scheme with lowest torque sum and the red colored case marks the scheme with the highest torque sum.
| Configuration | 0 ↔ 13 | 0 ↔ 2 | 0 ↔ 4 |
|---|
| 13 ↔ 2 ↔ 4 | 97, 120, 94 [Nm] | 199, 18, 94 [Nm] | 199, 243, 319 [Nm] |
| 13 ↔ 4 ↔ 2 | 170, 120, 122 [Nm] | 350, 18, 122 [Nm] | 350, 243, 122 [Nm] |
| 2 ↔ 13 ↔ 4 | 56, 120, 76 [Nm] | 158, 18, 76 [Nm] | 56, 243, 255 [Nm] |
| Configuration | 0 ↔ 14 | 0 ↔ 2 | 0 ↔ 3 |
| 14 ↔ 2 ↔ 3 | 143, 152, 165 [Nm] | 154, 206, 165 [Nm] | 154, 133, 185 [Nm] |
| 14 ↔ 3 ↔ 2 | 188, 152, 102 [Nm] | 203, 206, 290 [Nm] | 203, 133, 102 [Nm] |
| 2 ↔ 14 ↔ 3 | 56, 152, 118 [Nm] | 158, 206, 118 [Nm] | 56, 133, 132 [Nm] |
| Configuration | 0 ↔ 23 | 0 ↔ 1 | 0 ↔ 4 |
| 23 ↔ 1 ↔ 4 | 127, 84, 57 [Nm] | 118, 152, 57 [Nm] | 118, 152, 191 [Nm] |
| 23 ↔ 4 ↔ 1 | 203, 84,146 [Nm] | 188, 152, 132 [Nm] | 188, 152, 146 [Nm] |
| 1 ↔ 23 ↔ 4 | 91, 84, 57 [Nm] | 82, 152, 57 [Nm] | 91, 152, 191 [Nm] |
| Configuration | 0 ↔ 24 | 0 ↔ 1 | 0 ↔ 3 |
| 24 ↔ 1 ↔ 3 | 199, 152, 96 [Nm] | 97, 127, 96 [Nm] | 97, 84, 107 [Nm] |
| 24 ↔ 3 ↔ 1 | 261, 152, 119 [Nm] | 127, 127, 107 [Nm] | 127, 84, 119 [Nm] |
| 1 ↔ 24 ↔ 3 | 111, 152, 118 [Nm] | 100, 127, 118 [Nm] | 111, 84, 132 [Nm] |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}























