
Internal Induced Voltage Modification for Current Limitation in Virtual Synchronous Machine

 , , , ,
, , , ,
Abstract
:1. Introduction
2. Proposed Method for Stable Current Limiting
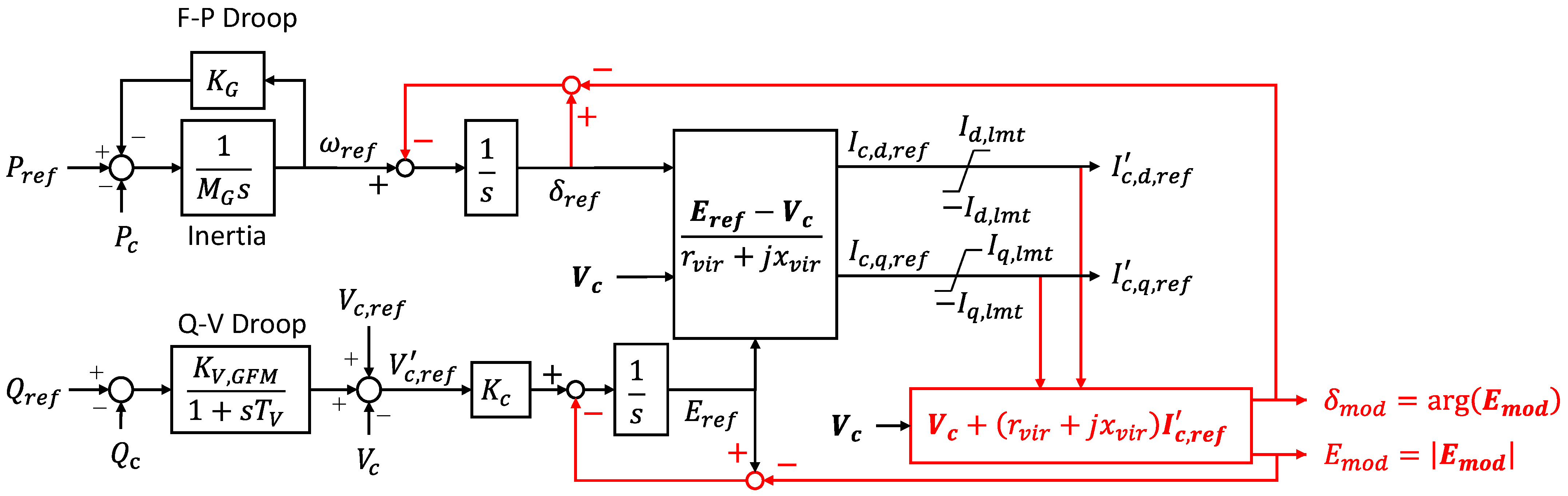
2.1. Virtual Synchronous Machine
2.2. Proposed Modification Methodology
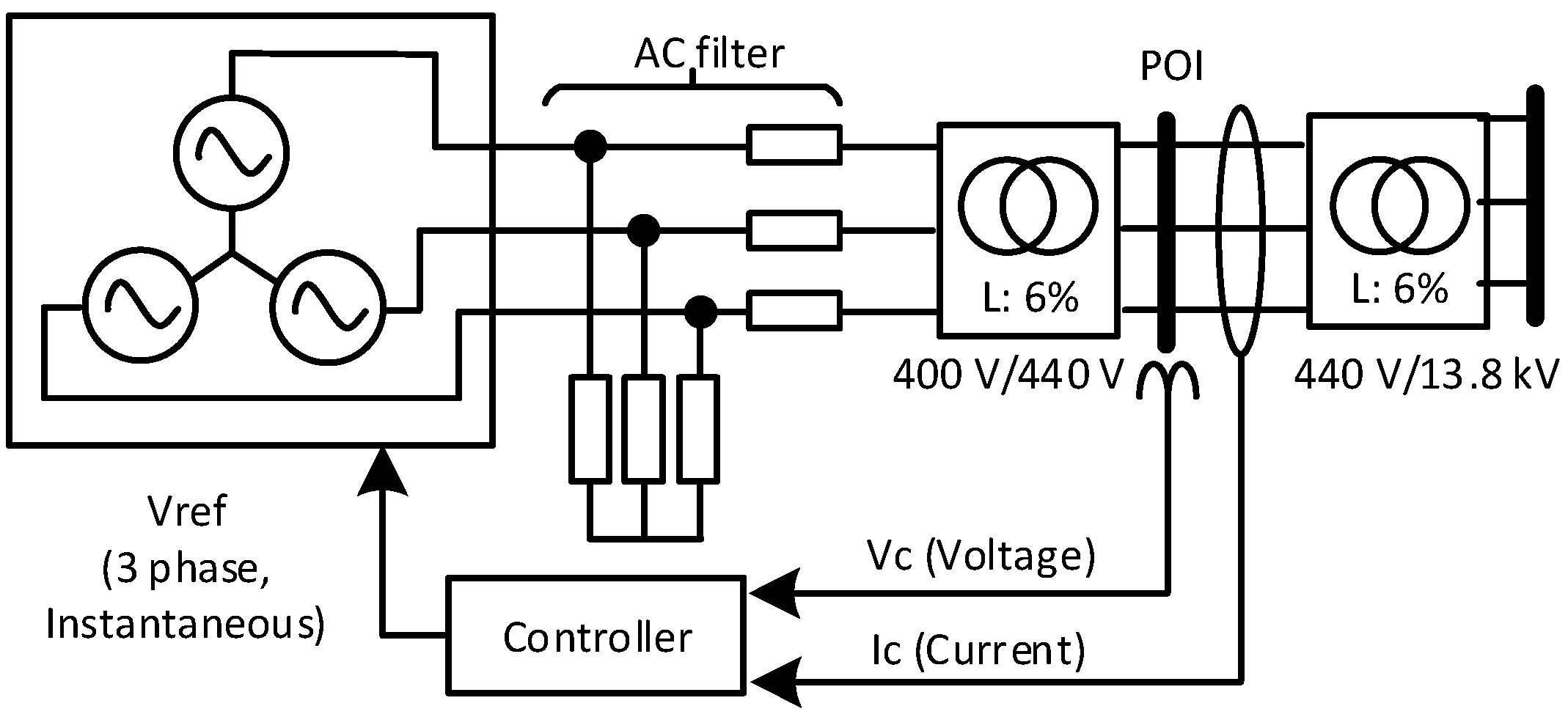
3. Simulation Model and Condition
3.1. Power System Model
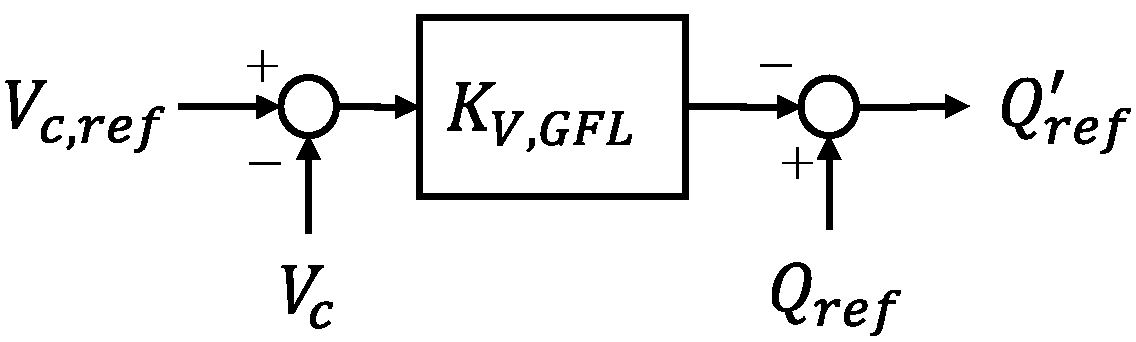
3.2. IBR Model for Comparison Study
3.3. Simulation Condition
4. Results
4.1. Base-Case Simulation to Set Simulation Conditions
4.2. Effectiveness of Proposed Methodology
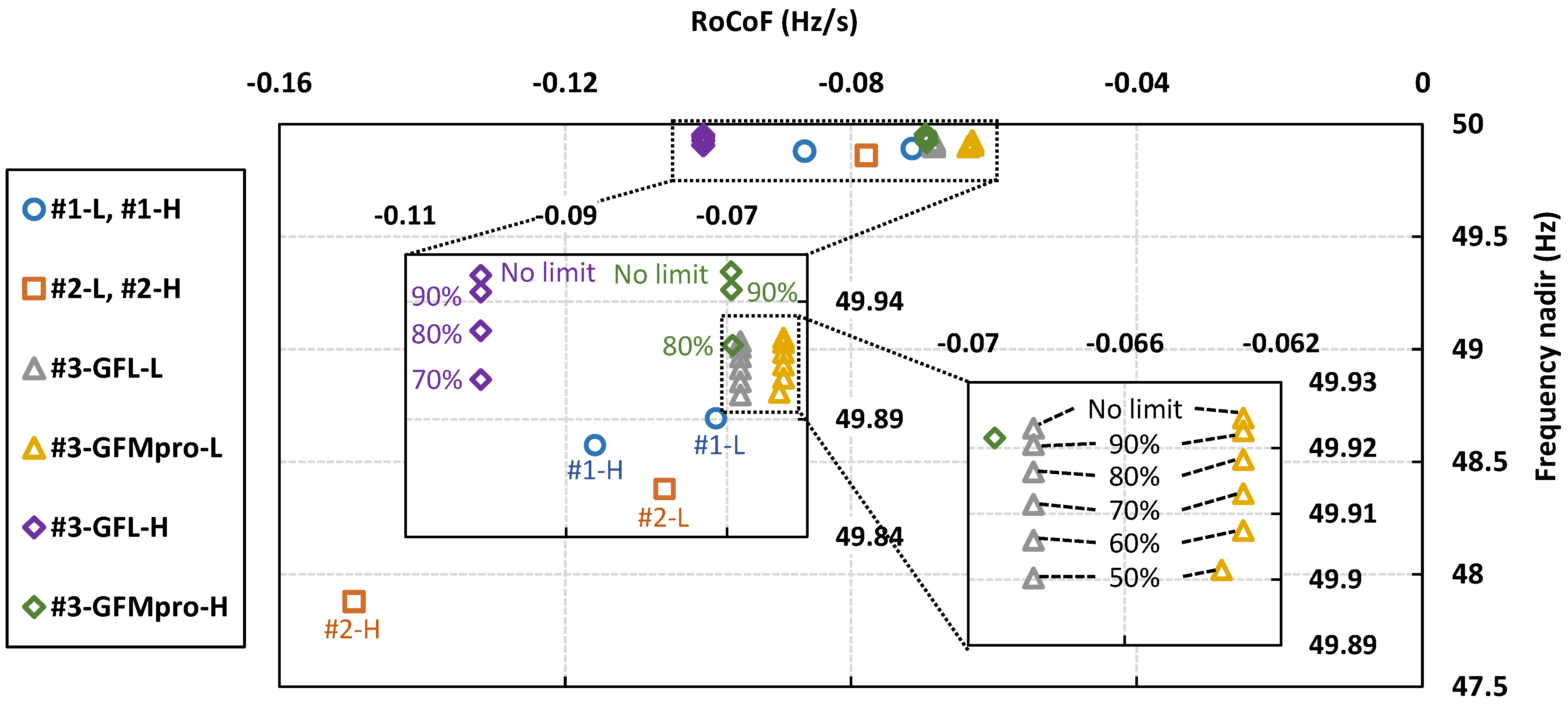
4.3. Frequency Stability Evaluation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Electric Power Research Institute. Basic Classification of Inverters; Technical Update; Electric Power Research Insititute: Palo Alto, CA, USA, 2019. [Google Scholar]
- Lin, Y.; Eto, J.H.; Johnson, B.B.; Flicker, J.D.; Lasseter, R.H.; Pico, H.N.V.; Seo, G.; Pierre, B.J.; Ellis, A. Research Roadmap on Grid-Forming Inverters; NREL Technical Report for National Renewable Energy Lab: Golden, CO, USA, 2020. [Google Scholar]
- Matevosyan, J.; Badrzadeh, B.; Prevost, T.; Quitmann, E.; Ramasubramanian, D.; Urdal, H.; Huang, S.H.; Vital, V.; O’Sullivan, J.; Quint, R. Grid-forming inverters: Are they the key for high renewable penetration? IEEE Power Energy Mag. 2019, 17, 89–98. [Google Scholar] [CrossRef]
- Gui, Y.; Wang, X.; Blaabjerg, F.; Pan, D. Control of grid-connected voltage-source converters: The relationship between direct-power control and vector-current control. IEEE Ind. Electron. Mag. 2019, 13, 31–40. [Google Scholar] [CrossRef] [Green Version]
- Kroposki, B.; Johnson, B.; Zhang, Y.; Gevorgian, V.; Denholm, P.; Hodge, B.; Hannegan, B. Achieving a 100% renewable grid: Operating electric power systems with extremely high levels of variable renewable energy. IEEE Power Energy Mag. 2017, 15, 61–73. [Google Scholar] [CrossRef]
- Yap, K.Y.; Charles, C.R.; Lim, J.M.-Y. Virtual inertia-based inverters for mitigating frequency instability in grid-connected renewable energy system: A review. Appl. Sci. 2019, 9, 5300. [Google Scholar] [CrossRef] [Green Version]
- Unruh, P.; Nuschke, M.; Strauß, P.; Welck, F. Overview on grid-forming inverter control methods. Energies 2020, 13, 2589. [Google Scholar] [CrossRef]
- Tamrakar, U.; Shrestha, D.; Maharjan, M.; Bhattarai, B.P.; Hansen, T.M.; Tonkoski, R. Virtual inertia: Current trends and future firections. Appl. Sci. 2017, 7, 654. [Google Scholar] [CrossRef]
- Electric Power Research Institute. Grid Forming Inverters; EPRI Tutorial; Electric Power Research Insititute: Palo Alto, CA, USA, 2021. [Google Scholar]
- Paolone, M.; Gaunt, T.; Guillaud, X.; Liserre, M.; Meliopoulos, S.; Monti, A.; van Cutsem, T.; Vittal, V.; Vournas, C. Fundamentals of power systems modelling in the presence of converter-interfaced generation. Electr. Power Syst. Res. 2020, 189, 106811. [Google Scholar] [CrossRef]
- Elkhatib, M.E.; Du, W.; Lasseter, R.H. Evaluation of Inverter-based Grid Frequency Support using Frequency-Watt and Grid-Forming PV Inverters. In Proceedings of the 2018 IEEE Power & Energy Society General Meeting (PESGM), Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar]
- Pattabiraman, D.; Lasseter, R.H.; Jahns, T.M. Comparison of Grid Following and Grid Forming Control for a High Inverter Penetration Power System. In Proceedings of the 2018 IEEE Power & Energy Society General Meeting (PESGM), Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar]
- Liu, J.; Miura, Y.; Ise, T. Comparison of dynamic characteristics between virtual synchronous generator and droop control in inverter-based distributed generators. IEEE Trans. Power Electron. 2016, 31, 3600–3611. [Google Scholar] [CrossRef]
- Qoria, T.; Gruson, F.; Colas, F.; Denis, G.; Prevost, T.; Guiillaud, X. Critical clearing time determination and enhancement of grid-forming converters embedding virtual impedance as current limitation algorithm. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 1050–1061. [Google Scholar] [CrossRef] [Green Version]
- Qoria, T.; Gruson, F.; Colas, F.; Kestelyn, X.; Guillaud, X. Current Limiting Algorithms and Transient Stability Analysis of Grid-Forming VSCs. Electr. Power Syst. Res. 2020, 189, 106726. [Google Scholar] [CrossRef]
- Samanta, S.; Chaudhuri, N.R. On Stability Analysis of Power Grids with Synchronous Generators and Grid-Forming Converters under DC-side Current Limitation. In Proceedings of the IEEE 2021 American Control Conference (ACC), Online Conference, 25–28 May 2021; pp. 1817–1823. [Google Scholar]
- Zhou, L.; Liu, S.; Chen, Y.; Yi, W.; Wang, S.; Zhou, X.; Wu, W.; Zhou, J.; Xiao, C.; Liu, A. Harmonic Current and Inrush Fault Current Coordinated Suppression Method for VSG Under Non-ideal Grid Condition. IEEE Trans. Power Electron. 2021, 36, 1030–1042. [Google Scholar] [CrossRef]
- Narita, T.; Sugimori, S.; Nakajima, T.; Mitsugu, Y.; Hashiguchi, H. Overcurrent Suppression Control for Grid Forming Inverter. In Proceedings of the 11th Solar & Storage Power System Integration Workshop, Berlin, Germany, 28 September 2021. [Google Scholar]
- He, J.; Wei, Y. Analysis, design, and implementation of virtual impedance for power electronics interfaced distributed generation. IEEE Trans. Ind. Appl. 2011, 47, 2525–2538. [Google Scholar] [CrossRef]
- Beheshtaein, D.; Golestan, S.; Cuzner, R.; Guerrero, J.M. A New Adaptive Virtual Impedance based Fault Current Limiter for Converters. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 2439–2444. [Google Scholar]
- Yan, J.; Zhao, C.; Zhang, F.; Xu, J. The preemptive virtual impedance based fault current limiting control for MMC-HVDC. In Proceedings of the 8th Renewable Power Generation Conference (RPG 2019), Shanghai, China, 24–25 October 2019; pp. 1–6. [Google Scholar]
- Lin, X.; Liang, Z.; Zheng, Y.; Lin, Y.; Kang, Y. A current limiting strategy with parallel virtual impedance for three-phase three-leg inverter under asymmetrical short-circuit fault to improve the controllable capability of fault currents. IEEE Trans. Power Electron. 2019, 34, 8138–8149. [Google Scholar] [CrossRef]
- Zhao, X.; Flynn, D. Freezing Grid-Forming Converter Virtual Angular Speed to Enhance Transient Stability Under Current Reference Limiting. In Proceedings of the 2020 IEEE 21st Workshop on Control and Modeling for Power Electronics (COMPEL), Aalborg, Denmark, 9–12 November 2020; pp. 1–7. [Google Scholar]
- Paquette, A.D.; Divan, D.M. Virtual impedance current limiting for inverters in microgrids with synchronous generators. IEEE Trans. Ind. Appl. 2015, 51, 1630–1638. [Google Scholar] [CrossRef]
- Groß, D.; Dörfler, F. Projected Grid-forming Control for Current-limiting of Power Converters. In Proceedings of the 2019 57th Annual Allerton Conference on Communication, Control, and Computing (Allerton), Monticello, IL, USA, 24–27 September 2019; p. 326333. [Google Scholar]
- Pattabiraman, D.; Lasseter, R.H.; Jahns, T.M. Transient Stability Modeling of Droop-Controlled Grid-Forming Inverters with Fault Current Limiting. In Proceedings of the 2020 IEEE Power & Energy Society General Meeting (PESGM), Montreal, QC, Canada, 2–6 August 2020; pp. 1–5. [Google Scholar]
- Li, Y.; Meng, K.; Dong, Z.Y. Frequency Enhancement of Grid-forming Inverters under Low-SCR Weak Grid. In Proceedings of the 8th Renewable Power Generation Conference (RPG 2019), Shanghai, China, 24–25 October 2019; pp. 1–7. [Google Scholar]
- Hirase, Y.; Uezaki, K.; Orihara, D.; Kikusato, H.; Hashimoto, J. Characteristic analysis and indexing of multimachine transient stabilization using virtual synchronous generator control. Energies 2021, 14, 366. [Google Scholar] [CrossRef]
- Rowan, T.M.; Kerkman, R.J. A new synchronous current regulator and an analysis of current-regulated PWM inverters. IEEE Trans. Ind. Appl. 1986, IA-22, 678–690. [Google Scholar] [CrossRef]
- Anderson, P.M.; Fouad, A.A. Power System Control and Stability, 2nd ed.; IEEE Press: Piscataway, NJ, USA, 2003; pp. 13–52, 83–148. [Google Scholar]
- Orihara, D.; Kikusato, H.; Hashimoto, J.; Otani, K.; Takamatsu, T.; Oozeki, T.; Taoka, H.; Matsuura, T.; Miyazaki, S.; Hamada, H.; et al. Contribution of voltage support function to virtual inertia control performance of inverter-based resource in frequency stability. Energies 2021, 14, 4220. [Google Scholar] [CrossRef]
- Mo, O. Average Model of PWM Converter; Project memo AN 03.12.103; SINTEF Energy Research: Trondheim, Norway, 2003. [Google Scholar]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step | Source Connected as S3 | S3 Capacity Ratio Corresponding to IBR 1 Penetration Rate in Steps 2 and 3 | |
|---|---|---|---|
| 20% (Low) | 60% (High) | ||
| 1 | Synchronous generator | #1-L | #1-H |
| 2 | IBR 1: conventional control | #2-L | #2-H |
| 3 | IBR 1: VI-GFM 2 without proposed modification logic | #3-GFM-L | #3-GFM-H |
| IBR 1: VI-GFM 2 with proposed modification logic | #3-GFMpro-L | #3-GFMpro-H | |
| IBR 1: VI-GFL 3 | #3-GFL-L | #3-GFL-H | |
| Percentage of S3 Capacity 1 (Means IBR Penetration Rate in Steps 2 and 3) | Rated Capacity (MVA) | ||
|---|---|---|---|
| S1 (SG 2) | S2 (SG 2) | S3 (Step 1: SG 2, Step 2, 3: IBR) | |
| 20% | 120 | 120 | 60 |
| 60% | 60 | 60 | 180 |
| Algorithm | Control Parameter | Letter | Value |
|---|---|---|---|
| VI-GFM, VI-GFL (common) | Inertia constant | 4.70 (s) | |
| Governor gain | 25.0 | ||
| VI-GFL | Voltage control gain | 10.0 | |
| Time constant of low-pass filter | 0.10 (s) | ||
| Time window of the slope computation | 0.10 (s) | ||
| VI-GFM | Voltage control gain | 0.10 | |
| Time constant of voltage controller | 0.02 (s) |
| Case Index | IBR Penetration Ratio | |||
|---|---|---|---|---|
| 20% | 60% | |||
| VI-GFM | VI-GFL | VI-GFM | VI-GFL | |
| No limit case | 1.20 pu | 1.20 pu | 1.20 pu | 1.20 pu |
| 90% case | 0.832 pu | 0.832 pu | 0.817 pu | 0.818 pu |
| 80% case | 0.828 pu | 0.828 pu | 0.814 pu | 0.815 pu |
| 70% case | 0.824 pu | 0.824 pu | - | 0.813 pu |
| 60% case | 0.820 pu | 0.820 pu | - | - |
| 50% case | 0.816 pu | 0.816 pu | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Orihara, D.; Taoka, H.; Kikusato, H.; Hashimoto, J.; Otani, K.; Takamatsu, T.; Oozeki, T.; Matsuura, T.; Miyazaki, S.; Hamada, H.; et al. Internal Induced Voltage Modification for Current Limitation in Virtual Synchronous Machine. Energies 2022, 15, 901. https://doi.org/10.3390/en15030901
Orihara D, Taoka H, Kikusato H, Hashimoto J, Otani K, Takamatsu T, Oozeki T, Matsuura T, Miyazaki S, Hamada H, et al. Internal Induced Voltage Modification for Current Limitation in Virtual Synchronous Machine. Energies. 2022; 15(3):901. https://doi.org/10.3390/en15030901
Chicago/Turabian StyleOrihara, Dai, Hisao Taoka, Hiroshi Kikusato, Jun Hashimoto, Kenji Otani, Takahiro Takamatsu, Takashi Oozeki, Takahiro Matsuura, Satoshi Miyazaki, Hiromu Hamada, and et al. 2022. "Internal Induced Voltage Modification for Current Limitation in Virtual Synchronous Machine" Energies 15, no. 3: 901. https://doi.org/10.3390/en15030901
APA StyleOrihara, D., Taoka, H., Kikusato, H., Hashimoto, J., Otani, K., Takamatsu, T., Oozeki, T., Matsuura, T., Miyazaki, S., Hamada, H., & Miyazaki, T. (2022). Internal Induced Voltage Modification for Current Limitation in Virtual Synchronous Machine. Energies, 15(3), 901. https://doi.org/10.3390/en15030901