
A Study on MG-PMSM for High Torque Density of 45 kW–Class Tram Driving System

 ,
,  ,
,
Abstract
:1. Introduction
2. The Operation Principle of MG-PMSMs
3. Design Process of MG-PMSM
3.1. Design Specification
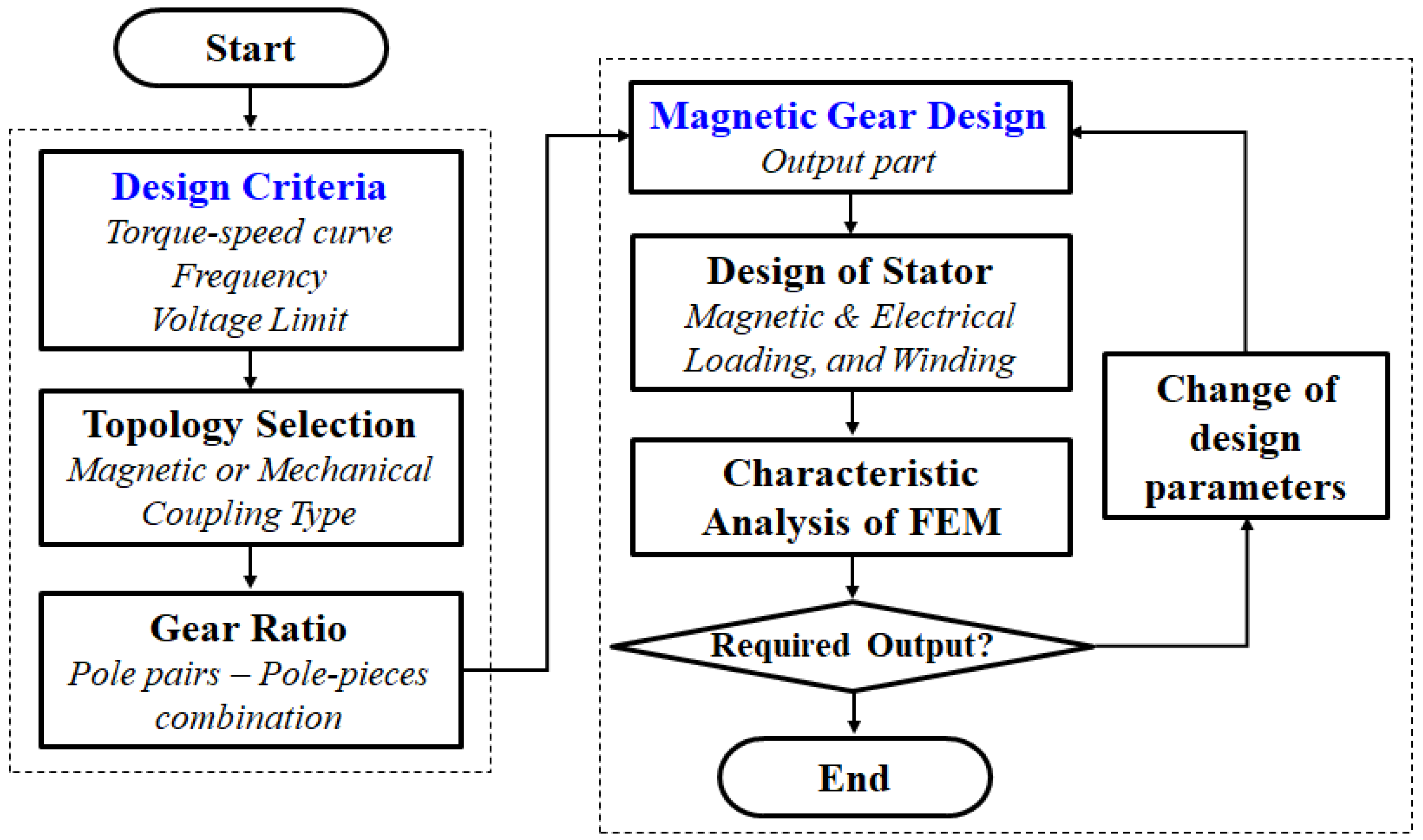
3.2. Design Process
4. Derivation of MG-PMSM Model for 45 kW–Class Tram
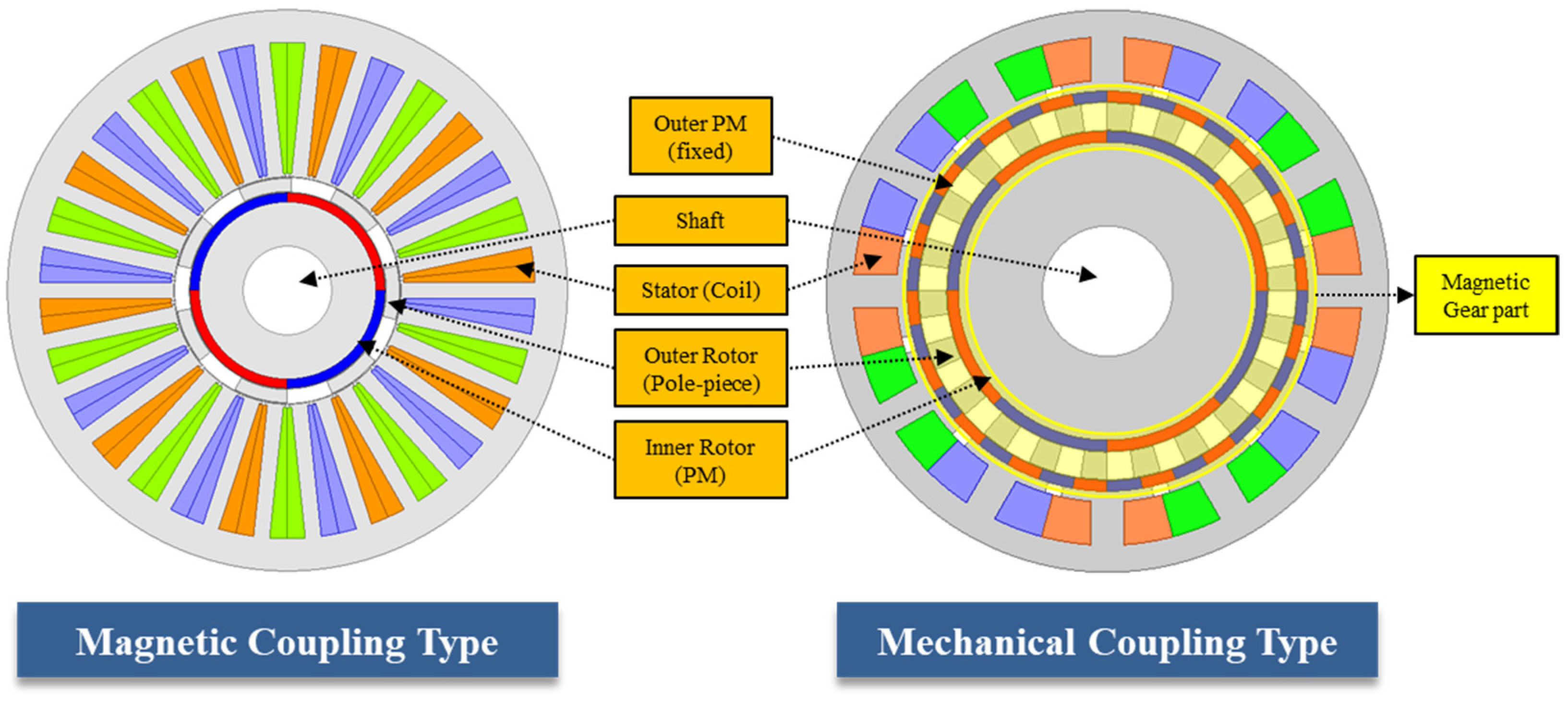
4.1. Topology Selection
4.2. Gear Ratio Selection
4.3. Design of Magnetic Gear Part
4.4. Design of MG-PMSM
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Zhang, X.; Huang, Y.H. Influence of anti-kink system on curve negotiation performance of low-floor tram. Urban Rail Transit Res. 2018, 21, 111–116. [Google Scholar]
- Hondius, H. The development of low-flow trams. J. Adv. Transp. 1993, 27, 79–102. [Google Scholar] [CrossRef]
- Atallah, K.; Calverley, S.D.; Howe, D. Design, analysis and realization of a high-performance magnetic gear. IEE Proc. Electr. Power Appl. 2004, 151, 2. [Google Scholar] [CrossRef]
- Park, C.B.; Jeong, G. Performance verification of DR-PMSM for traction system according to permanent magnet shape. AIP Adv. 2020, 10, 025105. [Google Scholar] [CrossRef]
- Lim, J.-H.; Jeong, G.; Lee, H.-W.; Lee, J.-B.; Lim, J.-S.; Park, C.-B. Design and Analysis of the 45 kW-Class Magnetic Geared Permanent Magnet Synchronous Motor for Traction of Tram Vehicles. Appl. Sci. 2021, 11, 6360. [Google Scholar] [CrossRef]
- Atallah, K.; Howe, D. A novel high-performance magnetic gear. IEEE Trans. Magn. 2001, 37, 2844–2846. [Google Scholar] [CrossRef] [Green Version]
- Neves, C.G.C.; Filho, A.F.F. Magnetic Gearing Eletromagnetic Concepts. J. Microw. Optoelectron. Electromagn. Appl. 2017, 16, 1. [Google Scholar] [CrossRef] [Green Version]
- Misron, N.; Mohd Saini, L.; Aris, I.; Vaithilingam, C.A.; Tsuyoshi, H. Simplified Design of Magnetic Gear by Considering the Maximum Transmission Torque Line. Appl. Sci. 2020, 10, 8581. [Google Scholar] [CrossRef]
- Cheng, M.; Sun, L.; Buja, G.; Song, L. Advanced Electrical Machines and Machine-Based Systems for Electric and Hybrid Vehicles. Energies 2015, 8, 9541–9564. [Google Scholar] [CrossRef] [Green Version]
- Zhao, H.; Liu, C.; Song, Z.; Liu, Z. A Consequent-Pole PM Magnetic-Geared Double-Rotor Machine With Flux-Weakening Ability for Hybrid Electric Vehicle Application. IEEE Trans. Magn. 2019, 55, 7. [Google Scholar] [CrossRef]
- Wang, Y.; Ho, S.L.; Fu, W.N.; Shen, J.X. A Novel Rotor Position Detection Method for Sensorless Control of Magnetic-Geared Permanent-Magnet Brushless Motor. IEEE Trans. Magn. 2013, 49, 7. [Google Scholar] [CrossRef]
- Sun, L.; Cheng, M.; Zhang, J.; Song, L. Analysis and Control of Complementary Magnetic-Geared Dual-Rotor Motor. IEEE Trans. Ind. Electron. 2016, 63, 11. [Google Scholar] [CrossRef]
- Shin, K.-H.; Cho, H.-W.; Kim, K.-H.; Hong, K.; Choi, J.-Y. Analytical Investigation of the On-Load Electromagnetic Performance of Magnetic-Geared Permanent-Magnet Machines. IEEE Trans. Magn. 2018, 54, 11. [Google Scholar] [CrossRef]
- Shin, H.; Chang, J. Comparison of Radial Force at Modulating Pieces in Coaxial Magnetic Gear and Magnetic Geared Machine. IEEE Trans. Magn. 2018, 54, 3. [Google Scholar] [CrossRef]
- Ito, K.; Nakamura, K. Investigation of Magnetic Interaction of IPM-Type Magnetic-Geared Motor. IEEE Trans. Magn. 2021, 57, 2. [Google Scholar] [CrossRef]
- Ren, X.; Li, D.; Qu, R.; Pei, T. Back EMF Harmonic Analysis of Permanent Magnet Magnetic Geared Machine. IEEE Trans. Magn. 2020, 67, 8. [Google Scholar] [CrossRef]
- Gerber, S.; Wang, R. Design and Evaluation of a Magnetically Geared PM Machine. IEEE Trans. Magn. 2015, 51, 8. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, X.; Chen, Z. Investigation of Unbalanced Magnetic Force in Magnetic Geared Machine Using Analytical Methods. IEEE Trans. Magn. 2016, 52, 7. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, K.; Ye, Y. Permanent Magnet Eddy Current Loss Analysis of a Novel Motor Integrated Permanent Magnet Gear. IEEE Trans. Magn. 2012, 48, 11. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Liu, Y. Analysis of Air-Gap Field Modulation and Magnetic Gearing Effect in Fractional-Slot Concentrated-Winding Permanent-Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2018, 65, 3688–3698. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value |
|---|---|
| MG-PMSM Installation Space | Diameter 620 mm/Axial Length 450 mm |
| Stator Diameter | Max 520 mm |
| Shaft Diameter | 222.5 mm |
| Axial Length | Max 400 mm (including End-turn) |
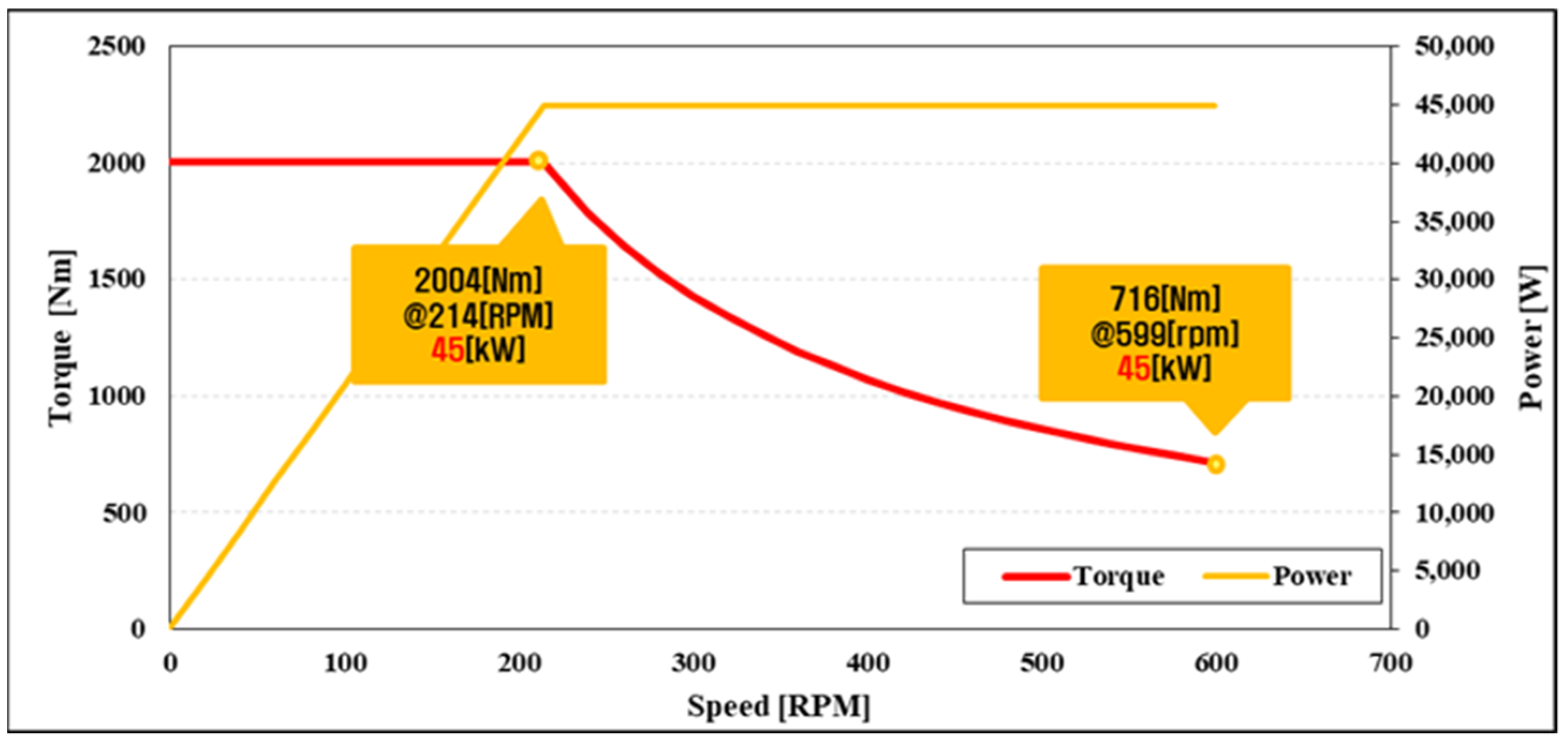
| Torque | 2004 Nm @ 214 RPM/716 Nm @ 599 RPM |
| DC Link Voltage | 733 V (SVPWM 433 V) |
| Electrical Frequency | <300 Hz |
| Efficiency | 93% |
| pin | Npp | pout | kr | GCD(2pin,Npp) | Pole-Piece Torque (Nm) | Torque Ripple Ratio (%) |
|---|---|---|---|---|---|---|
| 2 | 6 | 4 | 2 | 2 | 1033.5 | 93.3 |
| 2 | 10 | 8 | 1656.5 | 37.6 | ||
| 2 | 14 | 12 | 1996.2 | 21.4 | ||
| 4 | 6 | 2 | 1113.4 | 71.8 | ||
| 4 | 10 | 6 | 2057.7 | 13.3 | ||
| 4 | 14 | 10 | 2528.6 | 10.9 | ||
| 4 | 18 | 14 | 2788.1 | 8.9 | ||
| 4 | 22 | 18 | 2913.2 | 3.9 | ||
| 4 | 26 | 22 | 2945.5 | 5.2 | ||
| 4 | 30 | 26 | 2955.9 | 4.6 |
| Magnetic Flux Density Distribution | Specification | Value |
|---|---|---|
 | Stator Diameter | 520 mm |
| Axial Length | 200 mm | |
| Output Torque @ Rated Speed | 2.56 kNm | |
| Eddy Current Loss @ Rated Speed | 1.67 kW |
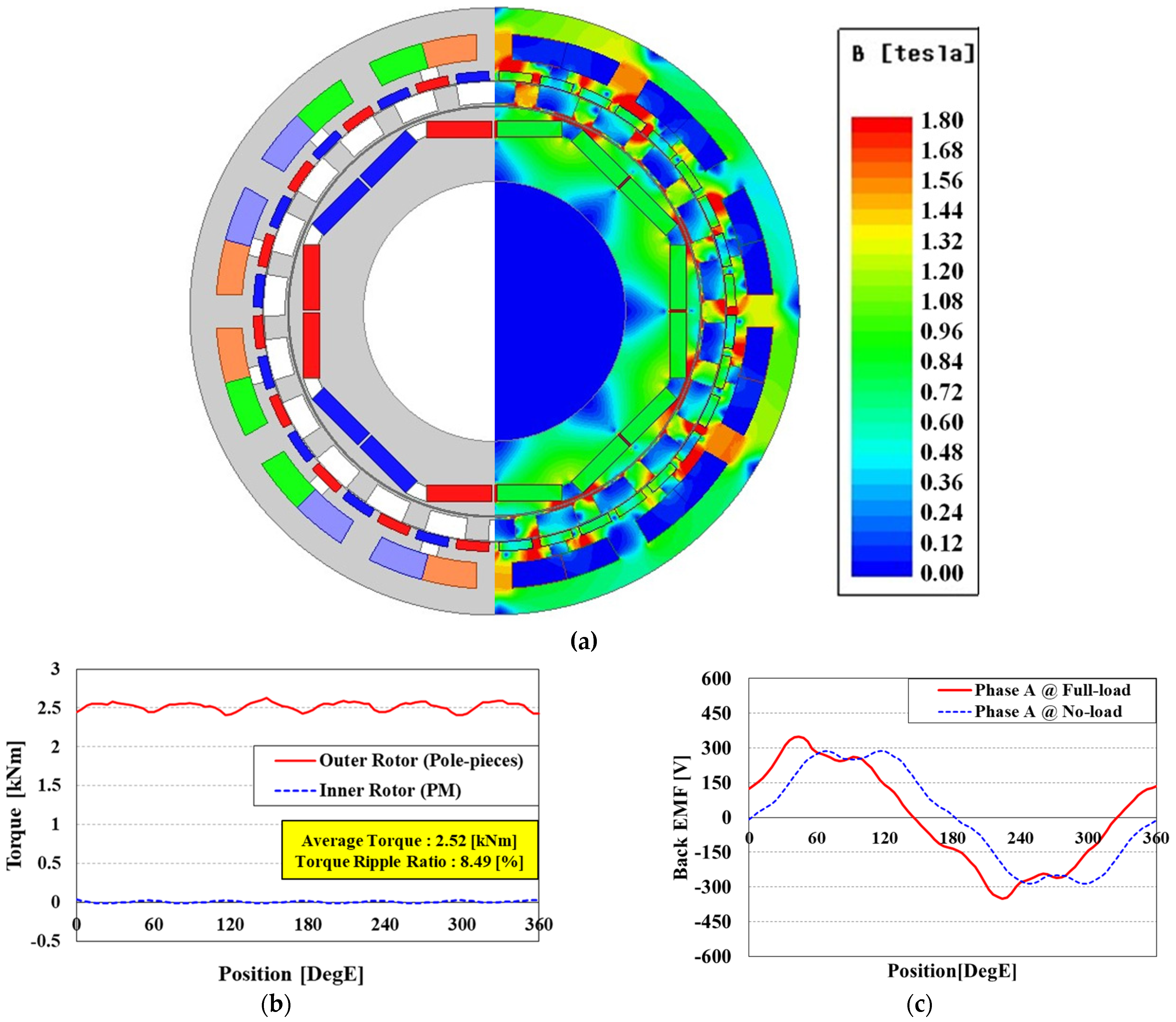
| Specification | Value |
|---|---|
| Stator Diameter | 520 mm |
| Axial Length | 200 mm |
| Torque/Torque Ripple Ratio | 2.52 kNm/8.49% |
| Power (Power Density) | 56.47 kW (0.24 kW/kg) |
| Speed of Inner Rotor/Pole-Piece | 1177 RPM/214 RPM |
| Gear Ratio | 5.5 |
| Current/Turns | 112 Arms/18 Turns |
| Voltage | 302.7 Vpeak |
| Power Factor | 0.85 |
| Efficiency | 94.0% |
| Vehicles | Speed | Gear Ratio | Output | Efficiency | Power Density (Weight of Motor) |
|---|---|---|---|---|---|
| Tilting Train | 6000 rpm | 7.07 | 250 kW | 92% | 0.40 kW/kg (620 kg) |
| Bimodal Tram | 3000 rpm | 14.42 | 45 kW | 89% | 0.31 kW/kg (145 kg) |
| K-AGT (Korean Automated Guideway Transit) | 4000 rpm | 6.833 | 110 kW | 90% | 0.18 kW/kg (620 kg) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jo, I.-H.; Lee, J.; Lee, H.-W.; Lee, J.-B.; Lim, J.-H.; Kim, S.-H.; Park, C.-B. A Study on MG-PMSM for High Torque Density of 45 kW–Class Tram Driving System. Energies 2022, 15, 1749. https://doi.org/10.3390/en15051749
Jo I-H, Lee J, Lee H-W, Lee J-B, Lim J-H, Kim S-H, Park C-B. A Study on MG-PMSM for High Torque Density of 45 kW–Class Tram Driving System. Energies. 2022; 15(5):1749. https://doi.org/10.3390/en15051749
Chicago/Turabian StyleJo, Ik-Hyun, Ju Lee, Hyung-Woo Lee, Jae-Bum Lee, Jae-Hyeon Lim, Seong-Hwi Kim, and Chan-Bae Park. 2022. "A Study on MG-PMSM for High Torque Density of 45 kW–Class Tram Driving System" Energies 15, no. 5: 1749. https://doi.org/10.3390/en15051749
APA StyleJo, I. -H., Lee, J., Lee, H. -W., Lee, J. -B., Lim, J. -H., Kim, S. -H., & Park, C. -B. (2022). A Study on MG-PMSM for High Torque Density of 45 kW–Class Tram Driving System. Energies, 15(5), 1749. https://doi.org/10.3390/en15051749