
Robust Sliding Mode Fuzzy Control of Industrial Robots Using an Extended Kalman Filter Inverse Kinematic Solver



Abstract
:1. Introduction
- Use of an extended Kalman filter as an inverse kinematic solver along with SMFC to control industrial robots;
- Elimination of the necessity to include a second order time derivative of joint angles in the control law;
- Superior performance over the sliding mode controller for UR5 as presented in [39].
2. Industrial Robot Dynamic and Kinematics
2.1. Industrial Robot Dyanmics
2.2. Inverse Kinematic Calculation for Industrial Robots
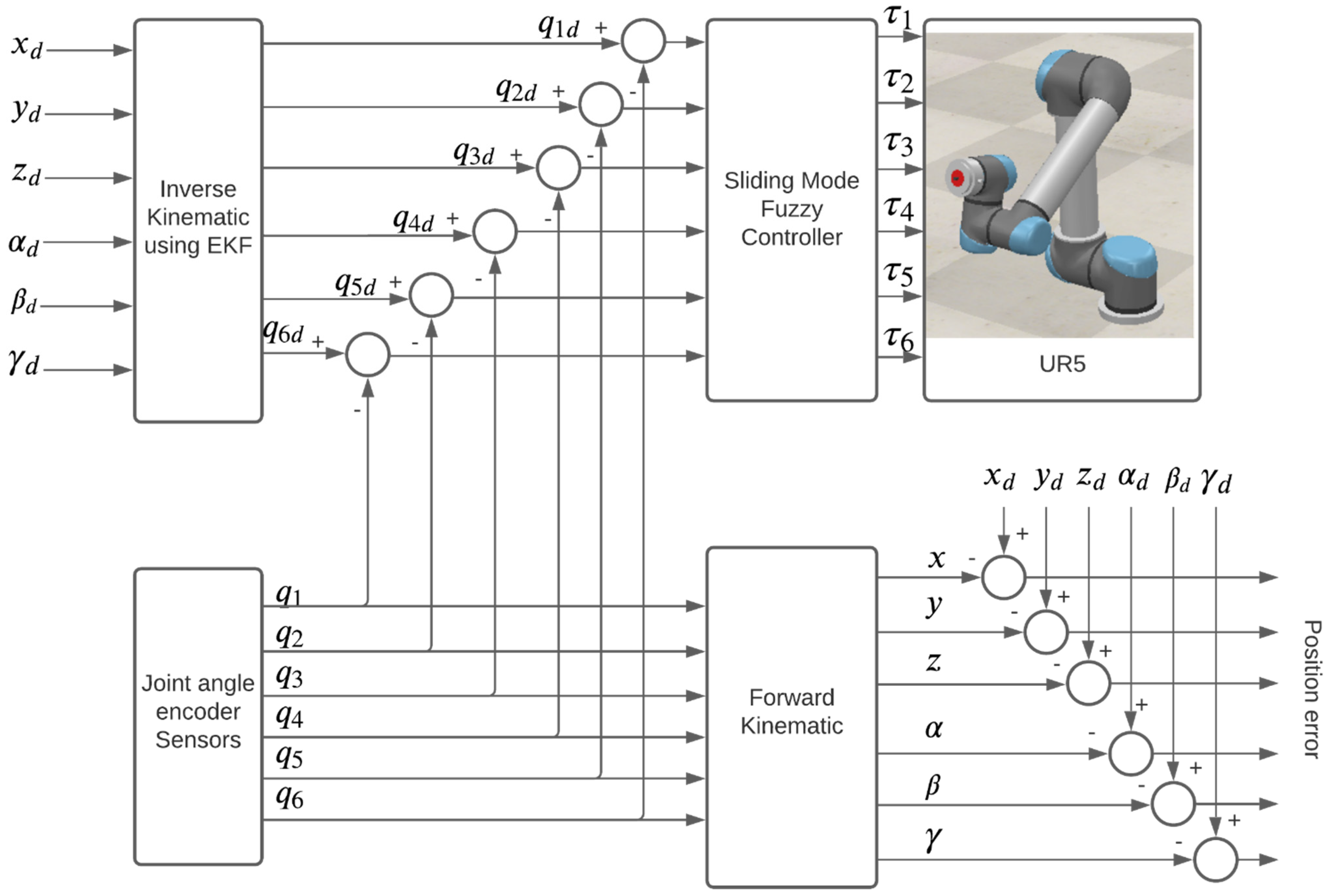
3. Control Architecture
3.1. Overall Control Structure
3.2. Sliding Mode Fuzzy Controller
3.2.1. Fuzzy System Structure
3.2.2. Sliding Mode Fuzzy Controller
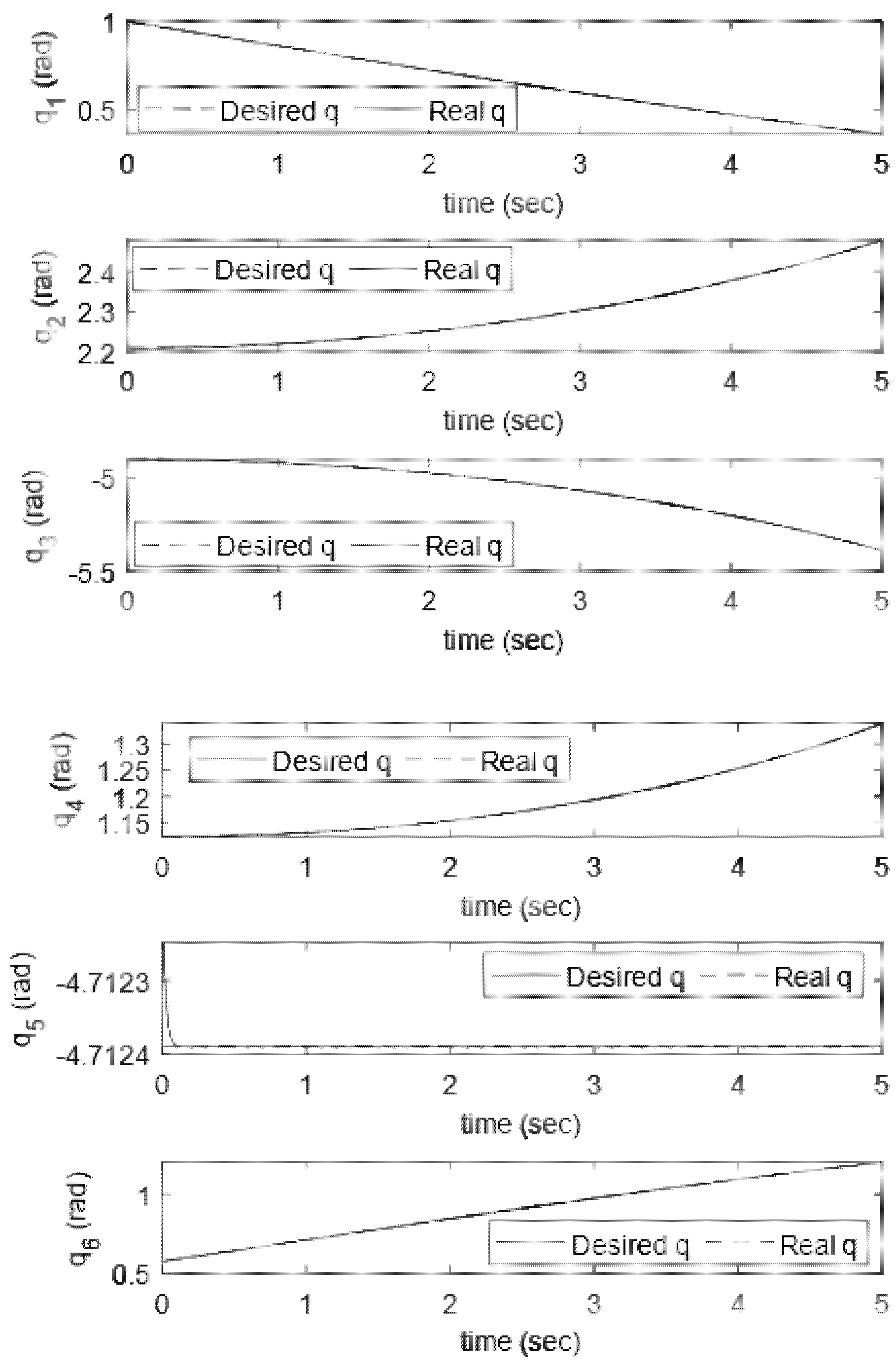
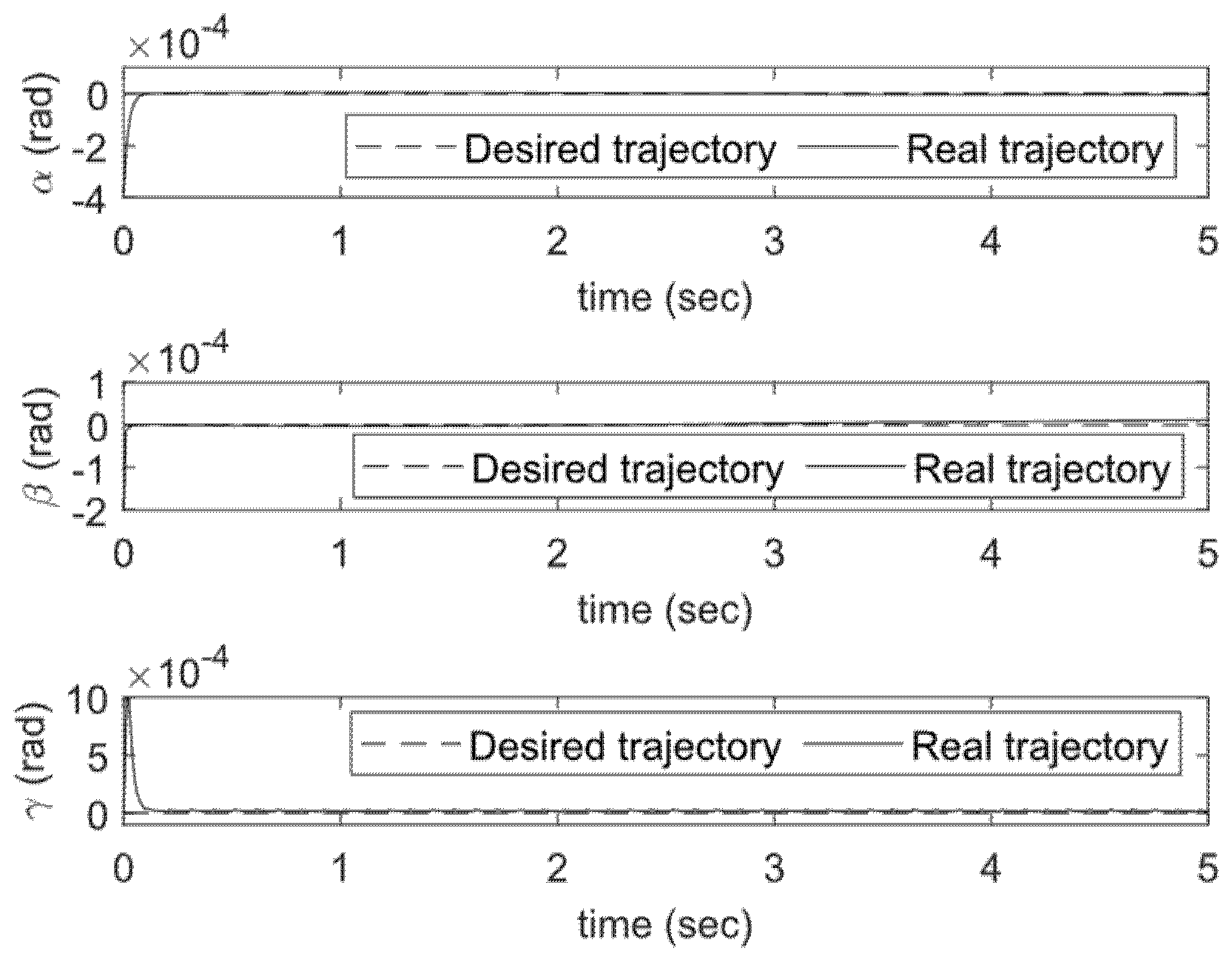
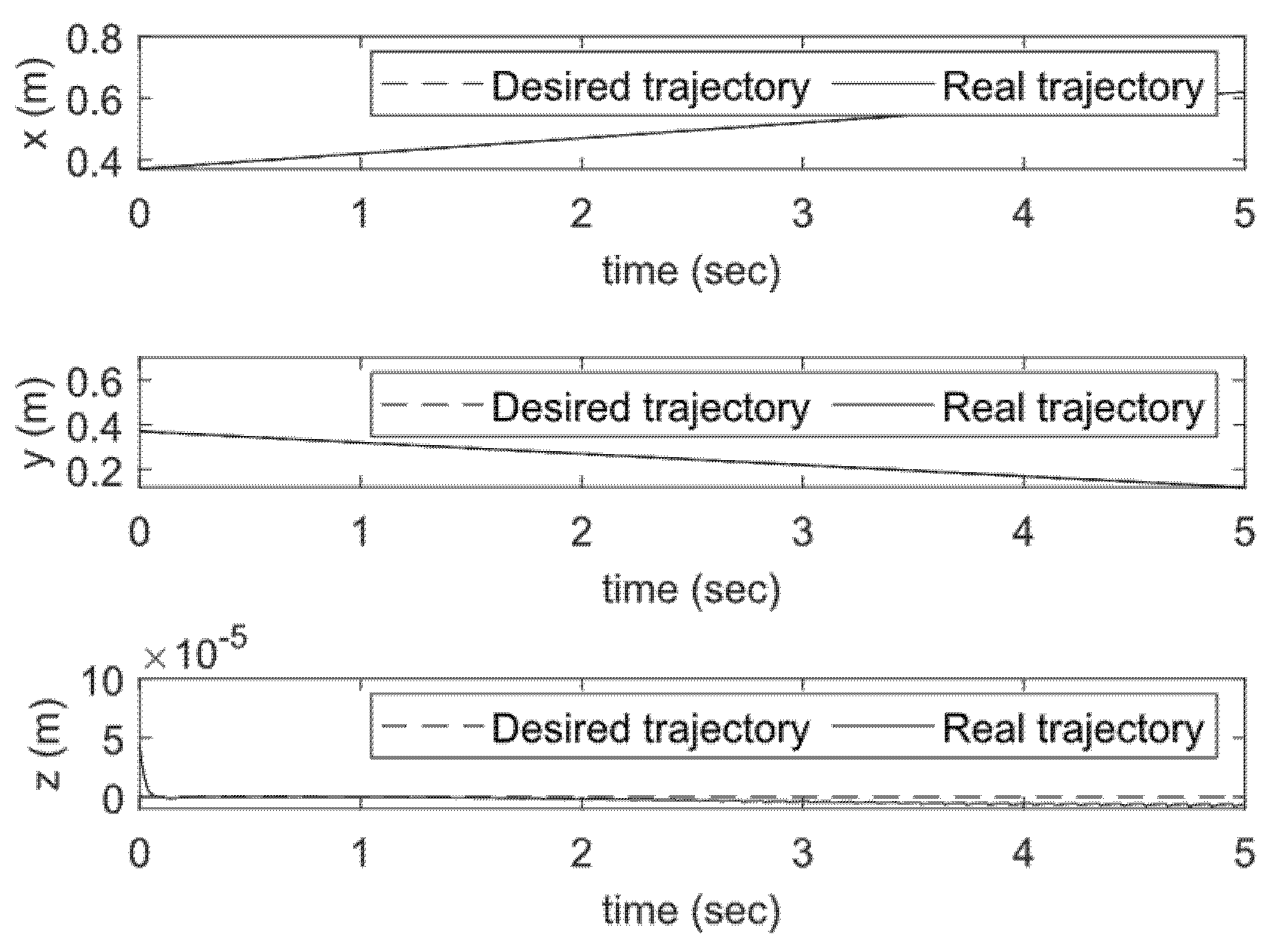
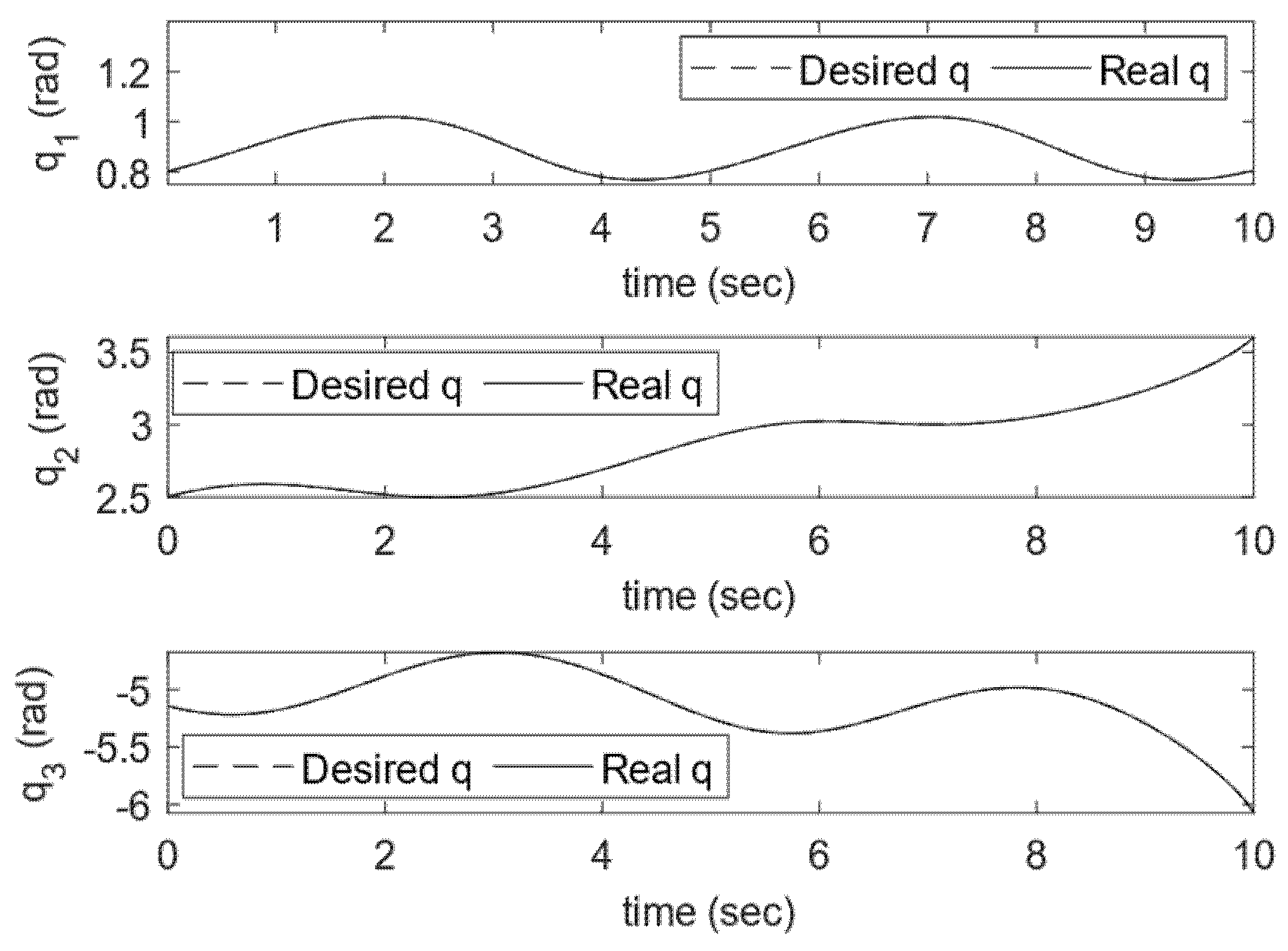
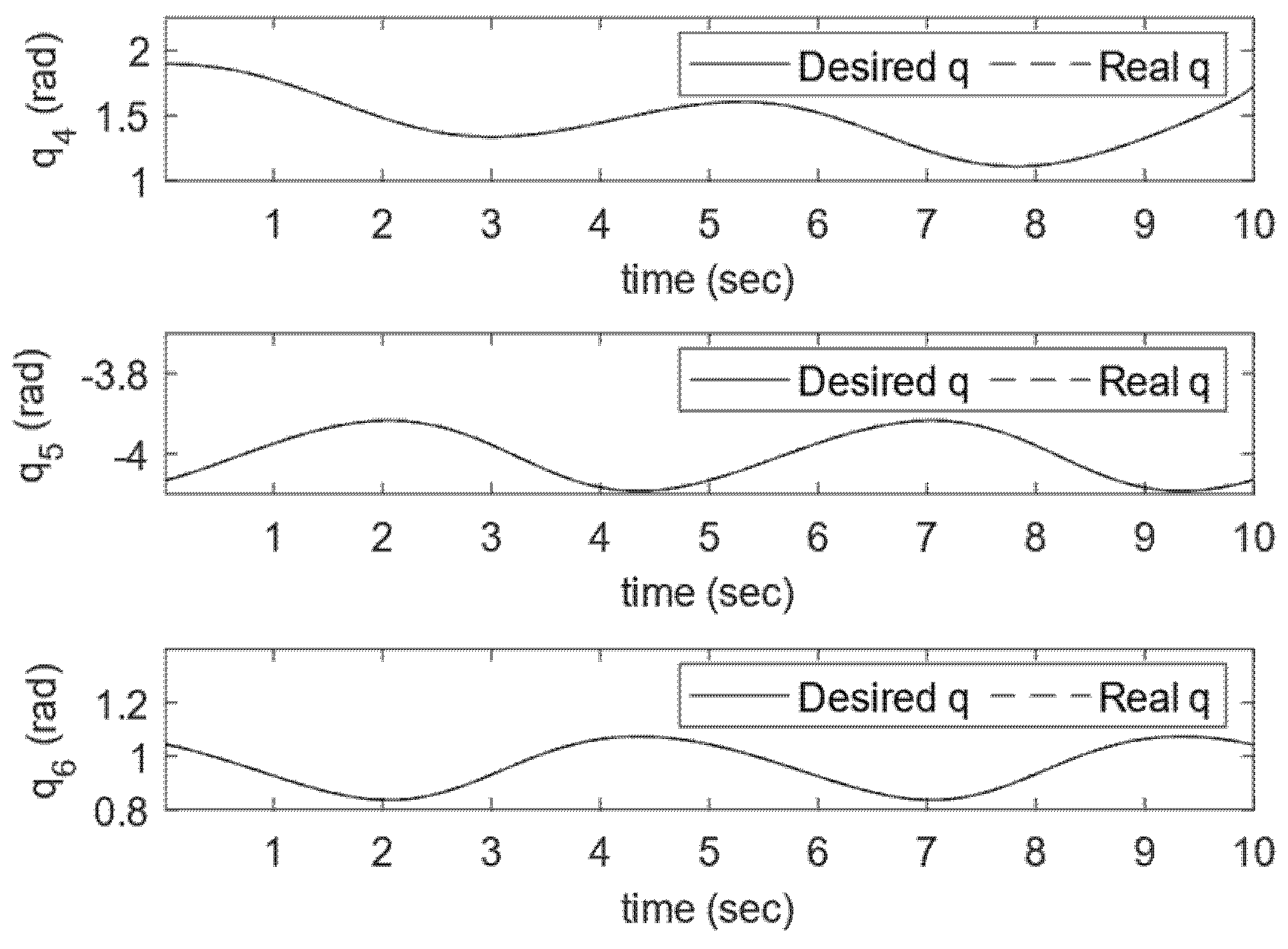
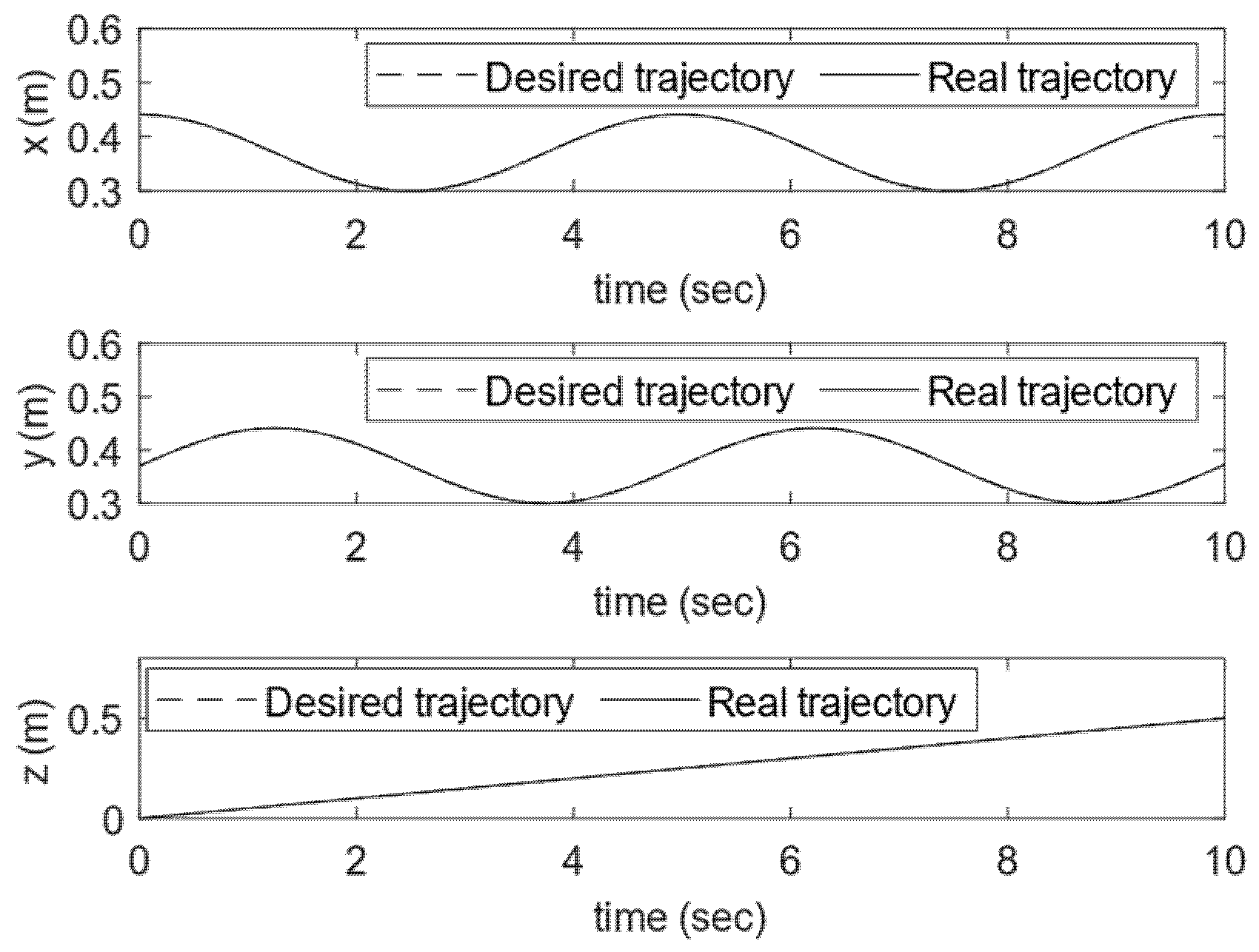
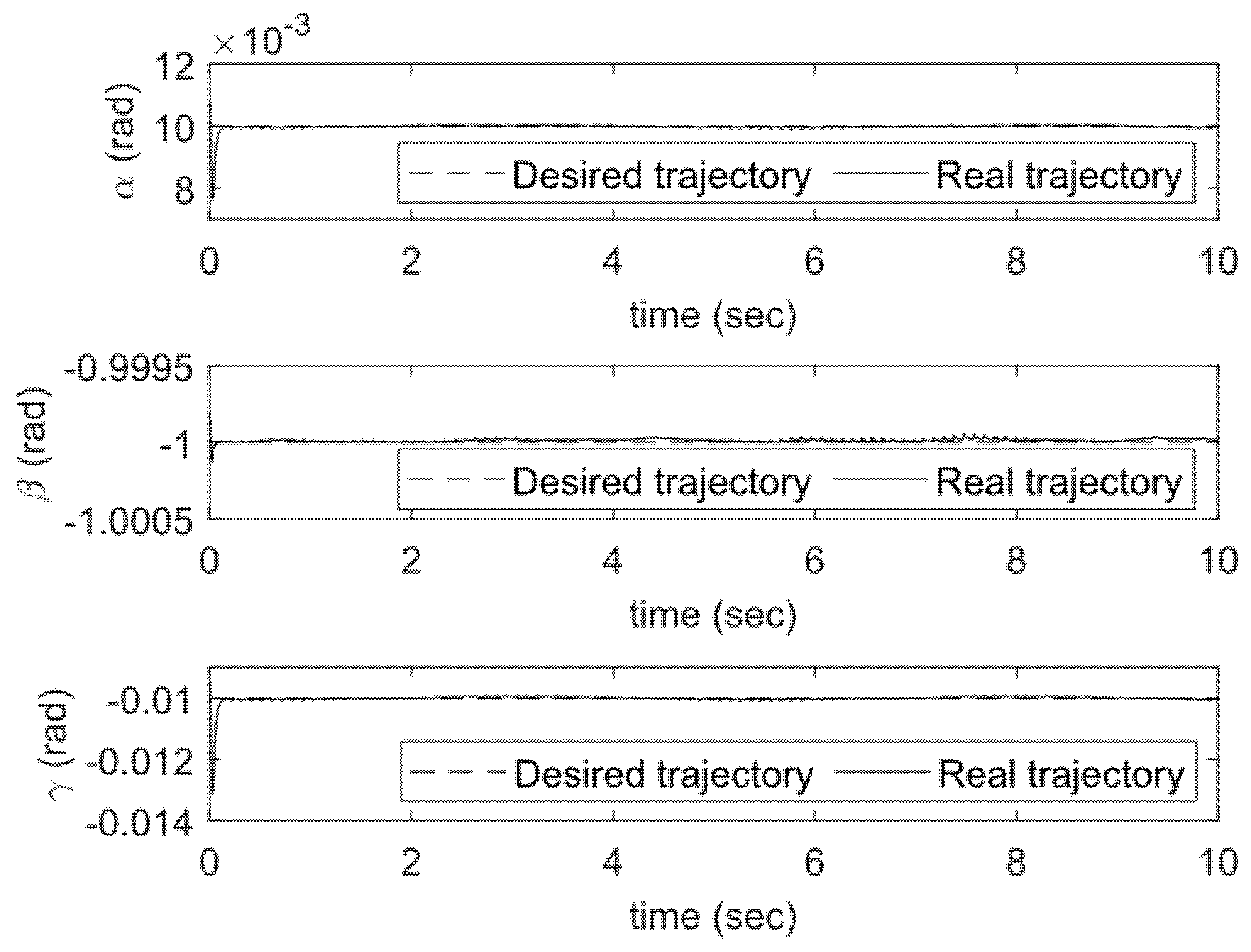
4. Simulation Results
5. Conclusions
6. Future Works
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wanasinghe, T.R.; Gosine, R.G.; James, L.A.; Mann, G.K.I.; de Silva, O.; Warrian, P.J. The Internet of Things in the Oil and Gas Industry: A Systematic Review. IEEE Internet Things J. 2020, 7, 8654–8673. [Google Scholar] [CrossRef]
- Garg, S.; Kaur, K.; Kaddoum, G.; Choo, K.-K.R. Toward Secure and Provable Authentication for Internet of Things: Realizing Industry 4.0. IEEE Internet Things J. 2020, 7, 4598–4606. [Google Scholar] [CrossRef]
- Burnap, P.; Branson, D.; Murray-Rust, D.; Preston, J.; Richards, D.; Burnett, D.; Edwards, N.; Firth, R.; Gorkovenko, K.; Khanesar, M.A.; et al. Chatty factories: A vision for the future of product design and manufacture with IoT. In Proceedings of the IET Conference, Online, 1–2 May 2019; pp. 4–6. [Google Scholar] [CrossRef]
- Lakoju, M.; Ajienka, N.; Khanesar, M.A.; Burnap, P.; Branson, D.T. Unsupervised Learning for Product Use Activity Recognition: An Exploratory Study of a "Chatty Device". Sensors 2021, 21, 4991. [Google Scholar] [CrossRef]
- Slamani, M.; Nubiola, A.; Bonev, I.A. Modeling and assessment of the backlash error of an industrial robot. Robotica 2012, 30, 1167–1175. [Google Scholar] [CrossRef]
- Hoang, M.L.; Carratu, M.; Paciello, V.; Pietrosanto, A. A new Orientation Method for Inclinometer based on MEMS Accelerometer used in Industry 4.0. In Proceedings of the 2020 IEEE 18th International Conference on Industrial Informatics (INDIN), Warwick, UK, 21–23 July 2020; pp. 177–181. [Google Scholar]
- Mishra, D.; Roy, R.B.; Dutta, S.; Pal, S.K.; Chakravarty, D. A review on sensor based monitoring and control of friction stir welding process and a roadmap to Industry 4.0. J. Manuf. Processes 2018, 36, 373–397. [Google Scholar] [CrossRef]
- Ahmadieh Khanesar, M.; Bansal, R.; Martínez-Arellano, G.; Branson, D.T. XOR Binary Gravitational Search Algorithm with Repository: Industry 4.0 Applications. Appl. Sci. 2020, 10, 6451. [Google Scholar] [CrossRef]
- Luo, H.; Zhao, F.; Guo, S.; Yu, C.; Liu, G.; Wu, T. Mechanical performance research of friction stir welding robot for aerospace applications. Int. J. Adv. Robot. Syst. 2021, 18, 1729881421996543. [Google Scholar] [CrossRef]
- Utkin, V.; Guldner, J.; Shi, J. Sliding Mode Control in Electro-Mechanical Systems; CRC press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Lin, J.; Zhao, Y.; Zhang, P.; Wang, J.; Su, H. Research on Compound Sliding Mode Control of a Permanent Magnet Synchronous Motor in Electromechanical Actuators. Energies 2021, 14, 7293. [Google Scholar] [CrossRef]
- Pietrala, M.; Leśniewski, P.; Bartoszewicz, A. Sliding Mode Control with Minimization of the Regulation Time in the Presence of Control Signal and Velocity Constraints. Energies 2021, 14, 2887. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Control; Pearson: Englewood Cliffs, NJ, USA, 2015. [Google Scholar]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Pearson Education Taiwan: Upper Saddle River, NJ, USA, 2005. [Google Scholar]
- Ullah, S.; Khan, Q.; Mehmood, A.; Bhatti, A.I. Robust backstepping sliding mode control design for a class of underactuated electro–mechanical nonlinear systems. J. Electr. Eng. Technol. 2020, 15, 1821–1828. [Google Scholar] [CrossRef]
- Ullah, S.; Khan, Q.; Mehmood, A.; Kirmani, S.A.M.; Mechali, O. Neuro-adaptive fast integral terminal sliding mode control design with variable gain robust exact differentiator for under-actuated quadcopter UAV. ISA Trans. 2021, 120, 293–304. [Google Scholar] [CrossRef]
- Ullah, S.; Mehmood, A.; Khan, Q.; Rehman, S.; Iqbal, J. Robust integral sliding mode control design for stability enhancement of under-actuated quadcopter. Int. J. Control Autom. Syst. 2020, 18, 1671–1678. [Google Scholar] [CrossRef]
- Liu, Y.; Kong, M.; Wan, N.; Ben-Tzvi, P. A geometric approach to obtain the closed-form forward kinematics of h4 parallel robot. J. Mech. Robot. 2018, 10, 051013. [Google Scholar] [CrossRef] [Green Version]
- Yahya, S.; Moghavvemi, M.; Mohamed, H.A. Geometrical approach of planar hyper-redundant manipulators: Inverse kinematics, path planning and workspace. Simul. Model. Pract. Theory 2011, 19, 406–422. [Google Scholar] [CrossRef]
- Vasilyev, I.; Lyashin, A. Analytical solution to inverse kinematic problem for 6-DOF robot-manipulator. Autom. Remote Control 2010, 71, 2195–2199. [Google Scholar] [CrossRef]
- Lai, Y.-L.; Liao, C.-C.; Chao, Z.-G. Inverse kinematics for a novel hybrid parallel–serial five-axis machine tool. Robot. Comput. Integr. Manuf. 2018, 50, 63–79. [Google Scholar] [CrossRef]
- Jiang, G.; Luo, M.; Bai, K.; Chen, S. A precise positioning method for a puncture robot based on a PSO-optimized BP neural network algorithm. Appl. Sci. 2017, 7, 969. [Google Scholar] [CrossRef]
- Hassan, A.A.; El-Habrouk, M.; Deghedie, S. Inverse kinematics of redundant manipulators formulated as quadratic programming optimization problem solved using recurrent neural networks: A review. Robotica 2020, 38, 1495–1512. [Google Scholar] [CrossRef]
- Jiménez-López, E.; de la Mora-Pulido, D.S.; Reyes-Ávila, L.A.; de la Mora-Pulido, R.S.; Melendez-Campos, J.; López-Martínez, A.A. Modeling of Inverse Kinematic of 3-DoF Robot, Using Unit Quaternions and Artificial Neural Network. Robotica 2021, 39, 1230–1250. [Google Scholar] [CrossRef]
- Lazarevska, E. A neuro-fuzzy model of the inverse kinematics of a 4 DOF robotic arm. In Proceedings of the 2012 UKSim 14th International Conference on Computer Modelling and Simulation, Cambridge, UK, 28–30 March 2012; pp. 306–311. [Google Scholar]
- Wang, X.; Liu, X.; Chen, L.; Hu, H. Deep-learning damped least squares method for inverse kinematics of redundant robots. Measurement 2021, 171, 108821. [Google Scholar] [CrossRef]
- Mohamed, N.A.; Azar, A.T.; Abbas, N.E.; Ezzeldin, M.A.; Ammar, H.H. Experimental Kinematic Modeling of 6-DOF Serial Manipulator Using Hybrid Deep Learning. In Proceedings of the AICV, Cairo, Egypt, 8–10 April 2020; pp. 283–295. [Google Scholar]
- Luo, G.; Zou, L.; Wang, Z.; Lv, C.; Ou, J.; Huang, Y. A novel kinematic parameters calibration method for industrial robot based on Levenberg-Marquardt and Differential Evolution hybrid algorithm. Robot. Comput. Integr. Manuf. 2021, 71, 102165. [Google Scholar] [CrossRef]
- Veitschegger, W.K.; Wu, C.-H. Robot calibration and compensation. IEEE J. Robot. Autom. 1988, 4, 643–656. [Google Scholar] [CrossRef]
- Omodei, A.; Legnani, G.; Adamini, R. Three methodologies for the calibration of industrial manipulators: Experimental results on a SCARA robot. J. Robot. Syst. 2000, 17, 291–307. [Google Scholar] [CrossRef]
- Habibullah, M.; Lu, D.D.-C. A speed-sensorless FS-PTC of induction motors using extended Kalman filters. IEEE Trans. Ind. Electron. 2015, 62, 6765–6778. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Z.; Zhou, W.; Li, H.; Mo, Y.; Ni, W.; Huang, Q. A New Kind of Accurate Calibration Method for Robotic Kinematic Parameters Based on the Extended Kalman and Particle Filter Algorithm. IEEE Trans. Ind. Electron. 2018, 65, 3337–3345. [Google Scholar] [CrossRef]
- Park, I.-W.; Lee, B.-J.; Cho, S.-H.; Hong, Y.-D.; Kim, J.-H. Laser-based kinematic calibration of robot manipulator using differential kinematics. IEEE/ASME Trans. Mechatron. 2011, 17, 1059–1067. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Yazdanpanah, M.J. Performance enhanced model reference adaptive control through switching non-quadratic Lyapunov functions. Syst. Control Lett. 2015, 76, 47–55. [Google Scholar] [CrossRef]
- Sun, J.; Xue, X.; Cheng, K.W.E. Fuzzy Sliding Mode Wheel Slip Ratio Control for Smart Vehicle Anti-Lock Braking System. Energies 2019, 12, 2501. [Google Scholar] [CrossRef] [Green Version]
- Khanesar, M.A.; Kayacan, E.; Teshnehlab, M.; Kaynak, O. Extended Kalman Filter Based Learning Algorithm for Type-2 Fuzzy Logic Systems and Its Experimental Evaluation. IEEE Trans. Ind. Electron. 2012, 59, 4443–4455. [Google Scholar] [CrossRef]
- Golouje, Y.N.; Abtahi, S.M. Chaotic dynamics of the vertical model in vehicles and chaos control of active suspension system via the fuzzy fast terminal sliding mode control. J. Mech. Sci. Technol. 2021, 35, 31–43. [Google Scholar] [CrossRef]
- Ovalle, L.; Ríos, H.; Ahmed, H. Robust Control for an Active Suspension System via Continuous Sliding-Mode Controllers. Eng. Sci. Technol. Int. J. 2021, 28, 101026. [Google Scholar] [CrossRef]
- Charaja, J.; Muñoz-Panduro, E.; Ramos, O.E.; Canahuire, R. Trajectory Tracking Control of UR5 Robot: A PD with Gravity Compensation and Sliding Mode Control Comparison. In Proceedings of the 2020 International Conference on Control, Automation and Diagnosis (ICCAD), Paris, France, 7–9 October 2020; pp. 1–5. [Google Scholar]
- Yin, X.; Pan, L. Direct adaptive robust tracking control for 6 DOF industrial robot with enhanced accuracy. ISA Trans. 2018, 72, 178–184. [Google Scholar] [CrossRef] [PubMed]
- Gravdahl, J.T. Force Estimation in Robotic Manipulators: Modeling, Simulation and Experiments. Ph.D. Thesis, Citeseer. NTNU, Trondheim, Norway, 2014. [Google Scholar]
- Kovincic, N.; Müller, A.; Gattringer, H.; Weyrer, M.; Schlotzhauer, A.; Brandstötter, M. Dynamic parameter identification of the Universal Robots UR5. In Proceedings of the ARW & OAGM Workshop, Steyr, Austria, 9–10 May 2019; pp. 44–53. [Google Scholar]
- Kufieta, K. Force Estimation in Robotic Manipulators: Modeling, Simulation and Experiments. In Department of Engineering Cybernetics NTNU Norwegian University of Science and Technology; Norwegian University of Science and Technology: Trondheim, Norway, 2014. [Google Scholar]
- Kebria, P.M.; Al-Wais, S.; Abdi, H.; Nahavandi, S. Kinematic and dynamic modelling of UR5 manipulator. In Proceedings of the 2016 IEEE international conference on systems, man, and cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 4229–4234. [Google Scholar]
- Chen, Y.; Luo, X.; Han, B.; Luo, Q.; Qiao, L. Model Predictive Control With Integral Compensation for Motion Control of Robot Manipulator in Joint and Task Spaces. IEEE Access 2020, 8, 107063–107075. [Google Scholar] [CrossRef]
- Khanesar, M.A.; Kaynak, O.; Kayacan, E. Sliding-Mode Fuzzy Controllers; Springer International Publishing: Cham, Switzerland, 2021. [Google Scholar]
- Farrell, J.A.; Polycarpou, M.M. Adaptive Approximation Based Control: Unifying Neural, Fuzzy and Traditional Adaptive Approximation Approaches; Wiley: Hoboken, NJ, USA, 2006. [Google Scholar]
- Ioannou, P.A.; Sun, J. Robust Adaptive Control; Courier Corporation: Mineola, NY, USA, 2012. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| JointSpaceControl_Model_C_ForceEstim/D_Matrix.m | |
| JointSpaceControl_Model_C_ForceEstim/C_Matrix.m | |
| JointSpaceControl_Model_C_ForceEstim/G_Vector.m | |
| ur5_modeling_force_estimate/Derive_Dyn_Equations_Model_C/get_rotation_matrices.m |
| Parameter | Value |
|---|---|
| 0.1 | |
| 0.1 | |
| 0.01 | |
| 50 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khanesar, M.A.; Branson, D. Robust Sliding Mode Fuzzy Control of Industrial Robots Using an Extended Kalman Filter Inverse Kinematic Solver. Energies 2022, 15, 1876. https://doi.org/10.3390/en15051876
Khanesar MA, Branson D. Robust Sliding Mode Fuzzy Control of Industrial Robots Using an Extended Kalman Filter Inverse Kinematic Solver. Energies. 2022; 15(5):1876. https://doi.org/10.3390/en15051876
Chicago/Turabian StyleKhanesar, Mojtaba Ahmadieh, and David Branson. 2022. "Robust Sliding Mode Fuzzy Control of Industrial Robots Using an Extended Kalman Filter Inverse Kinematic Solver" Energies 15, no. 5: 1876. https://doi.org/10.3390/en15051876
APA StyleKhanesar, M. A., & Branson, D. (2022). Robust Sliding Mode Fuzzy Control of Industrial Robots Using an Extended Kalman Filter Inverse Kinematic Solver. Energies, 15(5), 1876. https://doi.org/10.3390/en15051876