
Optimal DC Microgrid Operation with Model Predictive Control-Based Voltage-Dependent Demand Response and Optimal Battery Dispatch



Abstract
:1. Introduction
- (i)
- This paper proposes an integrated scheduling framework of voltage-based DR and SBs to enhance the DCM’s resilience based on the MPC method. The proposed framework considers voltage-based DR based on various operating conditions, such as variations of DC supply sources and grid AC faults, to avoid switching loads on and off continually to improve efficiency. Furthermore, it also reduces the charge and discharge cycles of the SBs, prolonging their service life.
- (ii)
- This paper applies the MPC approach to predict the input voltage of the DC bus based on the output current from the AC grid and DC supply sources. To train the behavior of the model in reacting to the DC bus voltage fluctuations under uncertain-ties in DERs and AC grid, a deep-Q network (DQN)-based reinforcement learning (RL) approach is proposed. The proposed algorithm is effective for making sequential decisions, an ability which the classical-model-based approaches (e.g., stochastic programing [26] and simulation approach [25,27]) do not possess.
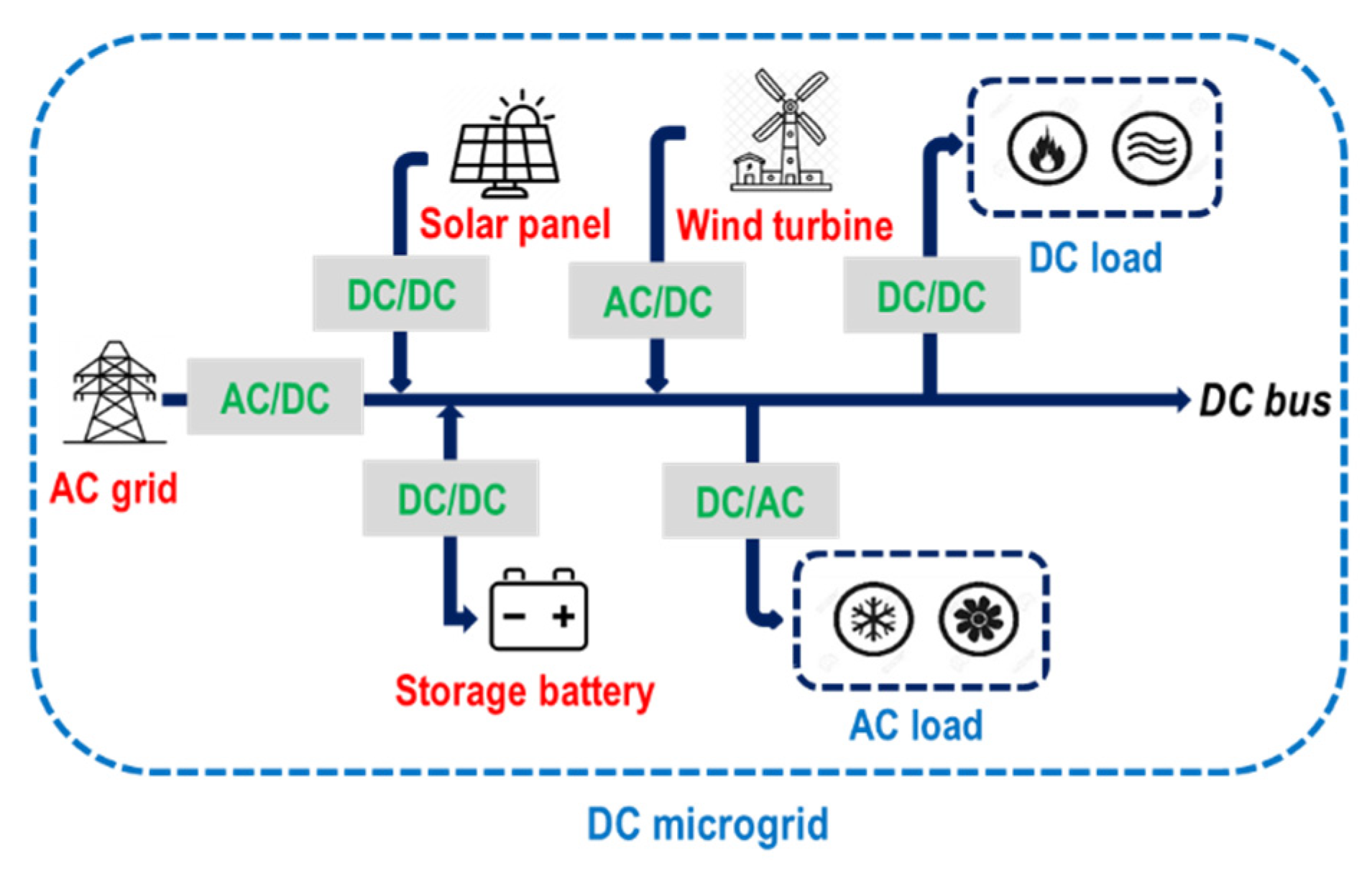
2. System Modeling
2.1. Predicted Input Voltage of DC Bus
2.1.1. Output Current from the Main Grid IG(t)
2.1.2. Output Current from the Photovoltaics IP(t)
2.1.3. Output Current from the Wind Power IW(t)
2.1.4. Output and Input Current from the Battery and
2.1.5. Total Current of the Loads IL(t)
2.2. Objective Function
2.3. Control Constraints
2.3.1. Power Balance Constraint
2.3.2. Power Flow in DC Microgrid
2.3.3. Voltage-Based Demand Response
3. System Methodology
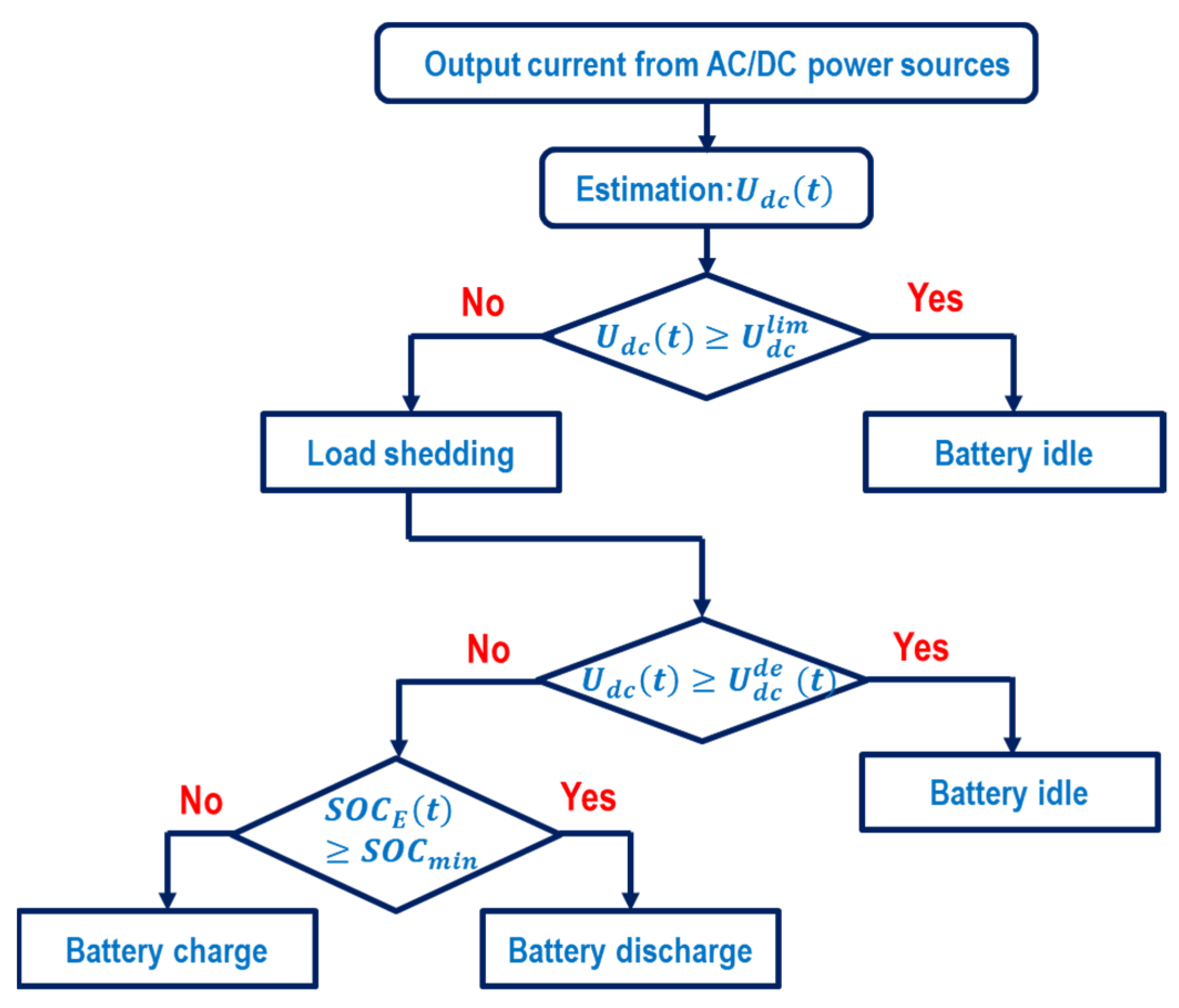
3.1. Proposed Control Strategy
3.2. Reinforcement Learning-Based Model Predictive Control
- (i)
- It can accommodate forecasting errors by considering the uncertainties based on both real-time observation and short-term prediction. Further, the relationship between the predicted result in the previous period and the uncertainty of the current period is also considered, optimizing forecasting errors.
- (ii)
- It can achieve better control effectiveness even on a nonlinear system with a large number of uncertainties. The input–output linearization procedure with a DQN is suitable for some practical problems since it does not require the exact knowledge and information of the nonlinear process.
| Algorithm 1: DQN-based MPC approach | |
| 1: | Require: Set of states: |
| 2: | Set of actions: |
| 3: | Reward function r (st, at) in Equation (19) |
| 4: | Initialize Qo (s, a) for all s, a |
| 5: | Repeat for each episode (i.e., day) e to E do |
| 6: | Initialize the state st |
| 7: | Initialize discount factor ς and learning rate ϕ |
| 8: | For time slot (i.e., 15 min) t = τ to T + τ do |
| 9: | Select the action at for the current state st by using -greedy policy |
| 10: | Received reward rt (st, at) as Equation (19) |
| 11: | Observe the next state st+1 |
| 12: | Update the Q-value Q (st, at) as Equation (31) |
| 13: | End for, when st+1 is terminal |
| 14: | Until is satisfied |
4. Simulation Results
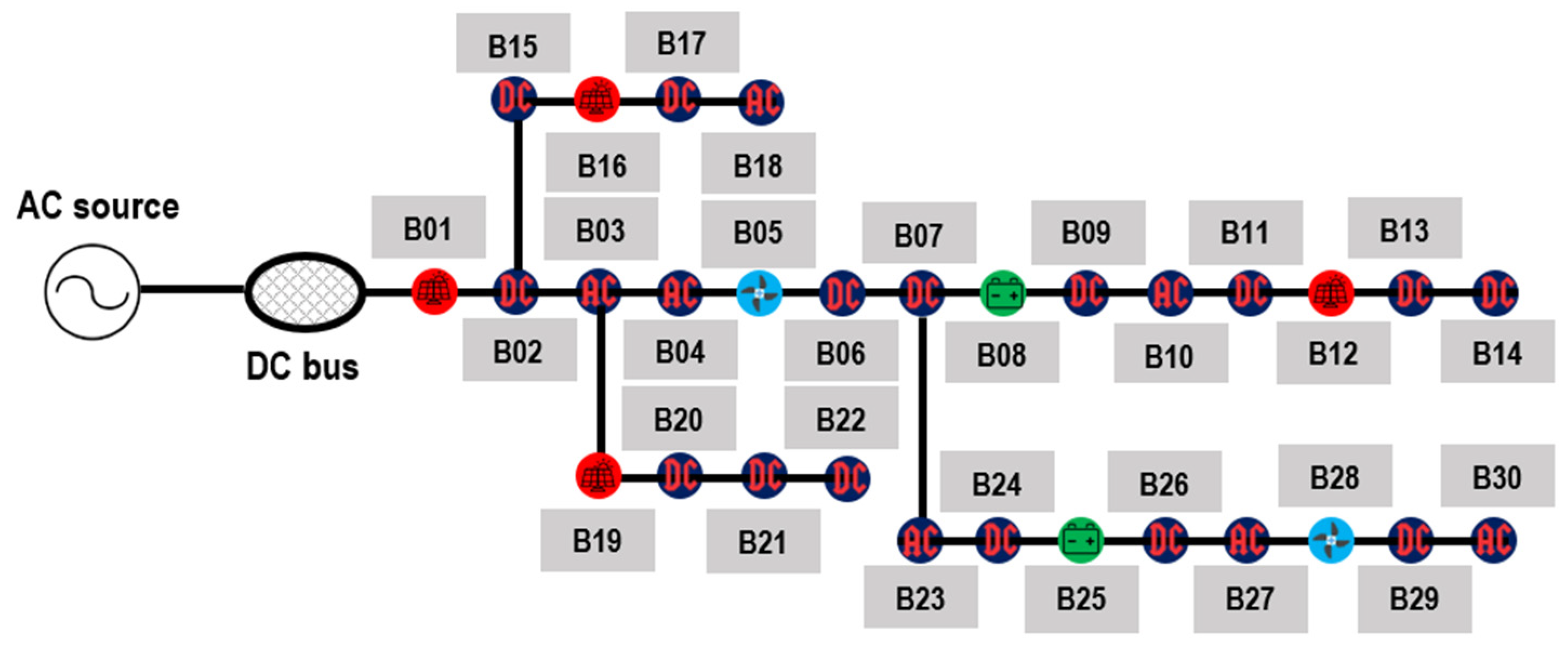
4.1. Simulation Setting
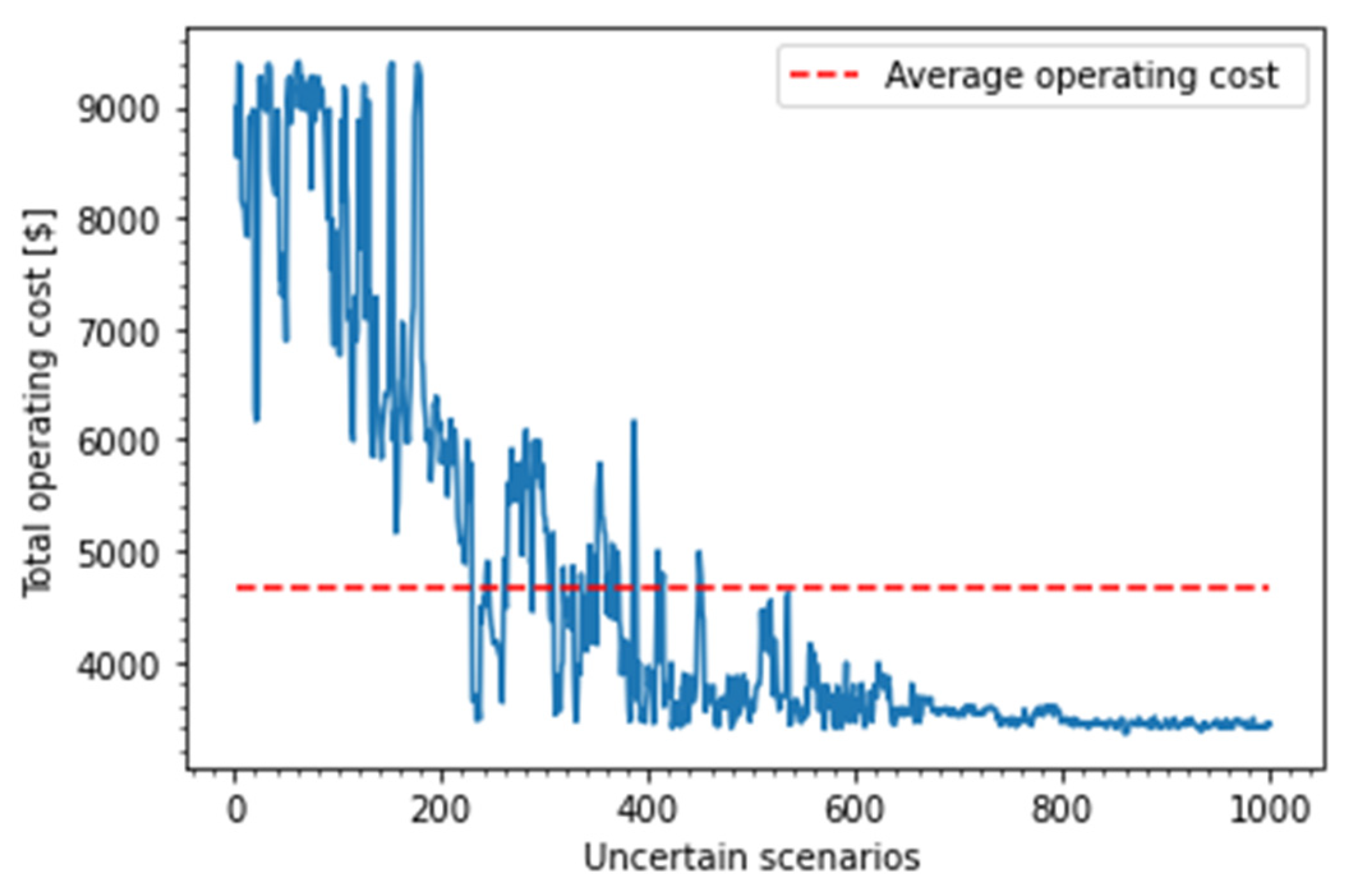
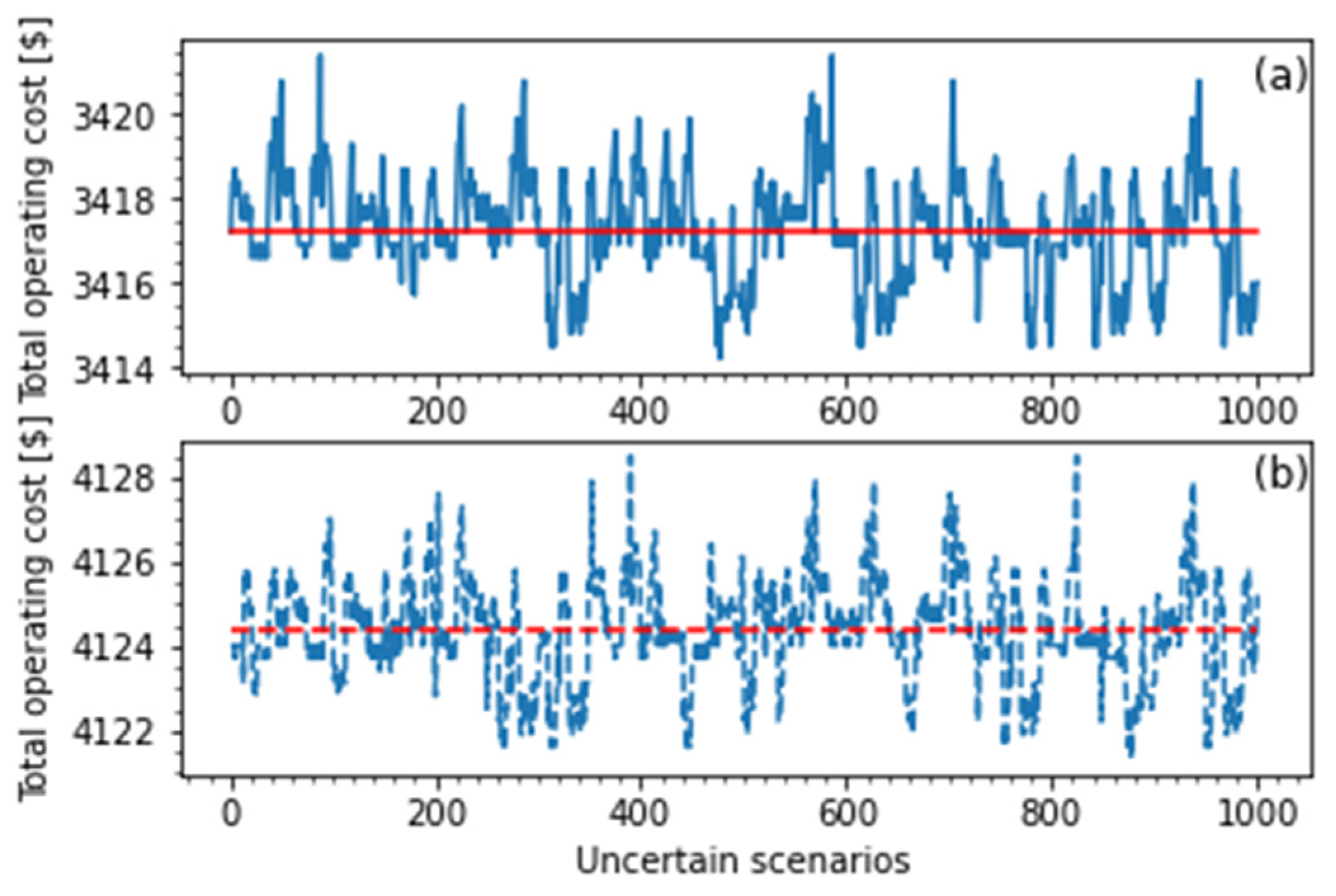
4.2. Benchmark with Stochastic Model-Based MPC
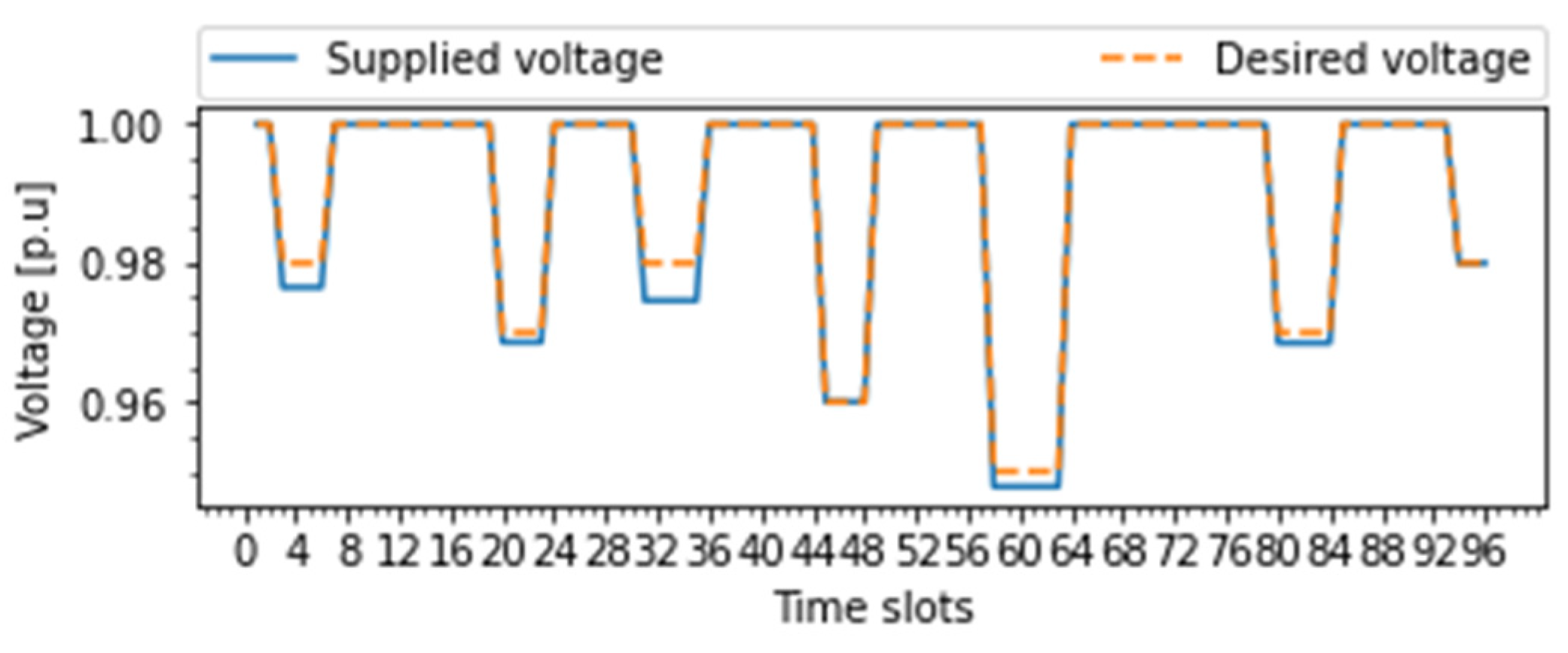
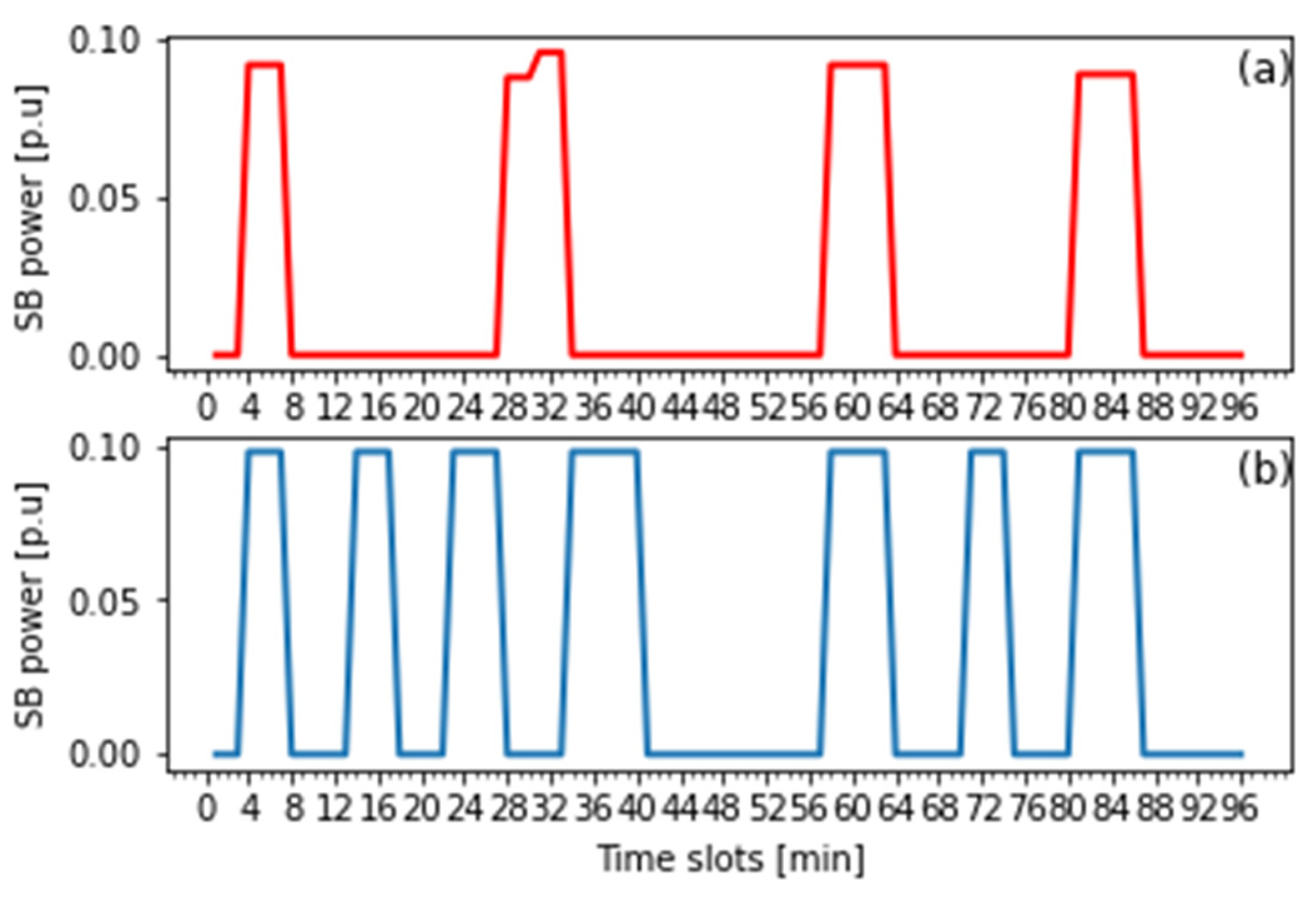
4.3. Effects of Voltage-Based DR
4.4. Load Interruption Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| A. Indices and Sets | ||
| B. Parameters | ||
| capacitance of DC bus [F] | ||
| power purchase cost from main grid [$] | ||
| maintenance cost of solar panel [$] | ||
| maintenance cost of wind turbine [$] | ||
| degradation cost of storage battery [$] | ||
| penalty cost of load shedding [$] | ||
| penalty cost of voltage deviation [$] | ||
| critical load magnitude [kW] | ||
| controllable load magnitude [kW] | ||
| sizing of solar panel [m2] | ||
| sizing of wind turbine [m2] | ||
| maximum power of main grid [kW] | ||
| maximum capacity of solar panel [kW/m2] | ||
| maximum capacity of wind turbine [kW/m2] | ||
| maximum capacity of storage battery [kW] | ||
| cost coefficient of solar panel [$] | ||
| cost coefficient of wind turbine [$] | ||
| cost coefficient of storage battery [$] | ||
| penalty factor for voltage demand response [$] | ||
| penalty factor for voltage deviation [$] | ||
| time-of-use price from main grid [$] | ||
| output current of DC bus at time t [A] | ||
| nominal voltage of DC bus at time t [V] | ||
| virtual resistance of DC bus [Ω] | ||
| admittance between bus i and j [number] | ||
| output voltage of main grid [V] | ||
| output voltage of solar panel [V] | ||
| output voltage of wind turbine [V] | ||
| input voltage for load [V] | ||
| output voltage of storage battery [V] | ||
| voltage magnitude in bus i [V] | ||
| voltage magnitude in bus j [V] | ||
| uncertain grid-connect condition [%] | ||
| uncertainty in solar panel at time t [%] | ||
| uncertainty in wind turbine at time t [%] | ||
| percentage of controllable load reduction [%] | ||
| maximum of load reduction at time t [%] | ||
| minimum of load reduction at time t [%] | ||
| AC-DC converter efficiency [%] | ||
| DC-DC/AC inverter efficiency [%] | ||
| discharging efficiency of storage battery [%] | ||
| charging efficiency of storage battery [%] | ||
| C. State variables | ||
| power provided by main grid at time t [kW] | ||
| power generated by solar panel at time t [kW] | ||
| power generated by wind turbine at time t [kW] | ||
| discharging power quantity at time t [kW] | ||
| charging power quantity at time t [kW] | ||
| total power supplied for load at time t [kW] | ||
| required power to regulate DC voltage [kW] | ||
| input voltage of a DC bus [V] | ||
| desired voltage of a DC bus at time t [V] | ||
| output current from main grid [A] | ||
| output current from solar panel [A] | ||
| output current from wind turbine [A] | ||
| input current of load [A] | ||
| discharging current of storage battery [A] | ||
| charging current of storage battery [A] | ||
| output current in a DC bus i [A] | ||
| state of charge (SOC) of storage battery [%] | ||
| D. Action variables | ||
| binary discharging decision of battery at time t | ||
| binary charging decision of battery at time t | ||
| binary on/off decision voltage demand response | ||
| binary on/off decision with main grid | ||
References
- Ma, W.-J.; Wang, J.; Lu, X.; Gupta, V. Optimal Operation Mode Selection for a DC Microgrid. IEEE Trans. Smart Grid 2016, 7, 2624–2632. [Google Scholar] [CrossRef]
- Meng, L.; Shafiee, Q.; Trecate, G.F.; Karimi, H.; Fulwani, D.; Lu, X.; Guerrero, J.M. Review on Control of DC Microgrids and Multiple Microgrid Clusters. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 928–948. [Google Scholar]
- Kavousi-Fard, A.; Wang, M.; Su, W. Stochastic resilient posthurricane power system recovery based on mobile emergency resources and reconfigura-ble networked microgrids. IEEE Access 2018, 6, 311–326. [Google Scholar] [CrossRef]
- Panteli, M.; Mancarella, P. Influence of extreme weather and climate change on the resilience of power systems: Impacts and possible mitigation strate-gies. Electr. Power Syst. Res. 2015, 127, 259–270. [Google Scholar] [CrossRef]
- Douglas, E. Texas Largely Relies on Natural Gas for Power. It Wasn’t Ready for the Extreme Cold. Available online: https://www.texastribune.org/2021/02/16/natural-gas-power-storm/ (accessed on 26 February 2021).
- Patterson, B.T. DC, come home: DC microgrids and the birth of the ‘Enernet’. IEEE Power Energy Mag. 2012, 10, 60–69. [Google Scholar] [CrossRef]
- Mueller, J.A.; Kimball, J.W. Modeling and Analysis of DC Microgrids as Stochastic Hybrid Systems. IEEE Trans. Power Electron. 2021, 36, 9623–9636. [Google Scholar] [CrossRef]
- Lu, X.; Guerrero, J.; Sun, K.; Vasquez, J.C. An Improved Droop Control Method for DC Microgrids Based on Low Bandwidth Communication with DC Bus Voltage Restoration and Enhanced Current Sharing Accuracy. IEEE Trans. Power Electron. 2013, 29, 1800–1812. [Google Scholar] [CrossRef] [Green Version]
- Li, P.; Han, P.; He, S.; Wang, X. Double-uncertainty optimal operation of hybrid AC/DC microgrids with high proportion of intermittent energy sources. J. Mod. Power Syst. Clean Energy 2017, 5, 838–849. [Google Scholar] [CrossRef] [Green Version]
- Tomeszewska, A.; Chu, Z.; Feng, X.; O’Kane, S.; Liu, X.; Chen, J.; Ji, C.; Endler, E.; Li, R.; Liu, L.; et al. Lithium-ion battery fast charging: A review. eTransportation 2019, 1, 100011. [Google Scholar] [CrossRef]
- Basic, H.; Dragicevic, T.; Pandzic, H.; Blaabjerg, F. DC microgrids with energy storage systems and demand response for providing support to frequency regulation of electrical power systems. In Proceedings of the 2017 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017; pp. 1–10. [Google Scholar]
- Eltamaly, A.M.; Alotaibi, M.A.; Alolah, A.I.; Ahmed, M.A. A novel demand response strategy for sizing of hybrid energy system with smart grid concepts. IEEE Access 2021, 9, 20277–20294. [Google Scholar] [CrossRef]
- Eltamaly, A.M.; Alotaibi, M.A. Novel Fuzzy-Swarm Optimization for Sizing of Hybrid Energy Systems Applying Smart Grid Concepts. IEEE Access 2021, 9, 93629–93650. [Google Scholar] [CrossRef]
- Medina, J.; Muller, N.; Roytelman, I. Demand Response and Distribution Grid Operations: Opportunities and Challenges. IEEE Trans. Smart Grid 2010, 1, 193–198. [Google Scholar] [CrossRef]
- Rad, H.M.; Davoudi, A. Towards building an optimal demand response framework for DC distribution networks. IEEE Trans. Smart Grid 2014, 5, 2626–2634. [Google Scholar]
- Mackay, L.; Kolios, P.; Ramirez-Elizondo, L.; Bauer, P. Voltage dependent demand response with dynamic hysteresis thresholds in DC microgrids. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Chauhan, R.K.; Phurailatpam, C.; Rajpurohit, B.S.; Gonzalez-Longatt, F.M.; Singh, S.N. Demand-Side Management System for Autonomous DC Microgrid for Building. Technol. Econ. Smart Grids Sustain. Energy 2017, 2, 4. [Google Scholar] [CrossRef]
- Zou, S.; Ma, Z.; Zhu, G.; Liu, X. Demand Side Management in Direct Current Distribution Networks: Convergence and Optimality. In Proceedings of the 2018 IEEE International Symposium on Circuits and Systems (ISCAS), Florence, Italy, 27–30 May 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Zou, S.; Ma, Z.; Liu, S. Load control problems in direct current distribution networks: Optimality, equilibrium of games. IEEE Trans. Control. Syst. Technol. 2020, 28, 347–360. [Google Scholar] [CrossRef]
- Zia, M.F.; Elbouchikhi, E.; Benbouzid, M. Optimal operational planning of scalable DC microgrid with demand response, islanding, and battery degrada-tion cost considerations. Appl. Energy 2019, 237, 695–707. [Google Scholar] [CrossRef]
- Che, L.; Shahidehpour, M. DC Microgrids: Economic Operation and Enhancement of Resilience by Hierarchical Control. IEEE Trans. Smart Grid 2014, 5, 2517–2526. [Google Scholar] [CrossRef]
- Zhao, T.; Pan, X.; Yao, S.; Ju, C.; Li, L. Strategic bidding of hybrid ac/dc microgrid embedded energy hubs: A two-stage chance constrained stochastic pro-gramming approach. IEEE Trans. Sustain. Energy 2000, 11, 116–125. [Google Scholar] [CrossRef]
- Hu, J.; Shan, Y.; Guerrero, J.M.; Ioinovici, A.; Chan, K.W.; Rodriguez, J. Model predictive control of microgrids—An overview. Renew. Sustain. Ble Energy Rev. 2021, 136, 110422. [Google Scholar] [CrossRef]
- Batiyah, S.; Sharma, R.; Abdelwahed, S.; Zohrabi, N. An MPC-based power management of standalone DC microgrid with energy storage. Int. J. Electr. Power Energy Syst. 2020, 120, 105949. [Google Scholar] [CrossRef]
- Hu, J.; Xu, Y.; Cheng, K.W.; Guerrero, J.M. A model predictive control strategy of PV-battery microgrid under variable power generations and load condi-tions. Appl. Energy 2018, 221, 195–203. [Google Scholar] [CrossRef]
- Su, W.; Yu, S.S.; Li, H.; Iu, H.H.-C.; Fernando, T. An MPC-Based Dual-Solver Optimization Method for DC Microgrids with Simultaneous Consideration of Operation Cost and Power Loss. IEEE Trans. Power Syst. 2020, 36, 936–947. [Google Scholar] [CrossRef]
- Ni, F.; Zheng, Z.; Xie, Q.; Xiao, X.; Zong, Y.; Huang, C. Enhancing resilience of DC microgrids with model predictive control based hybrid energy storage system. Int. J. Electr. Power Energy Syst. 2021, 128, 106738. [Google Scholar] [CrossRef]
- Wang, S.; Lu, L.; Han, X.; Ouyang, M.; Feng, X. Virtual-battery based droop control and energy storage system size optimization of a DC microgrid for electric vehicle fast charging station. Appl. Energy 2019, 259, 114146. [Google Scholar] [CrossRef]
- Wang, P.; Wang, W.; Meng, N.; Xu, D. Multi-objective energy management system for DC microgrids based on the maximum membership degree princi-ple. J. Mod. Power Syst. Clean Energy 2018, 6, 668–678. [Google Scholar] [CrossRef] [Green Version]
- Liang, Z.; Huang, C.; Su, W.; Duan, N.; Donde, V.; Wang, B.; Zhao, X. Safe Reinforcement Learning-Based Resilient Proactive Scheduling for a Commercial Building Considering Correlated Demand Response. IEEE Open Access J. Power Energy 2021, 8, 85–96. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; de Vicuna, L.G.; Castilla, M. Hierarchical Control of Droop-Controlled AC and DC Microgrids—A General Approach Toward Standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Li, C.; De Bosio, F.; Chen, F.; Chaudhary, S.K.; Vasquez, J.C.; Guerrero, J. Economic Dispatch for Operating Cost Minimization Under Real-Time Pricing in Droop-Controlled DC Microgrid. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 5, 587–595. [Google Scholar] [CrossRef] [Green Version]
- Xie, H.; Xu, X.; Li, Y.; Hong, W.; Shi, J. Model Predictive Control Guided Reinforcement Learning Control Scheme. In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, D.; Qiu, R.C. Deep reinforcement learning for power system applications: An overview. CSEE J. Power Energy Syst. 2020, 6, 213–225. [Google Scholar]
- Sabzevari, S.; Heydari, R.; Mohiti, M.; Savaghebi, M.; Rodriguez, J. Model-Free Neural Network-Based Predictive Control for Robust Operation of Power Converters. Energies 2021, 14, 2325. [Google Scholar] [CrossRef]
- Chen, J.; Chen, Y.; Tong, L.; Peng, L.; Kang, Y. A Backpropagation Neural Network-Based Explicit Model Predictive Control for DC–DC Converters with High Switching Frequency. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 2124–2142. [Google Scholar] [CrossRef]
- Chen, Z.; Hu, H.; Wu, Y.; Zhang, Y.; Li, G.; Liu, Y. Stochastic model predictive control for energy management of power split plug-in hybrid electric vehi-cles based on reinforcement learning. Energy 2020, 211, 118931. [Google Scholar] [CrossRef]
- Lu, R.; Hong, S.H. Incentive-based demand response for smart grid with reinforcement learning and deep neural network. Appl. Energy 2019, 236, 937–949. [Google Scholar] [CrossRef]
- Smarra, F.; Jain, A.; de Rubeis, T.; Ambrosini, D.; D’Innocenzo, A.; Mangharam, R. Data-driven model predictive control using random forests for building energy optimization and climate control. Appl. Energy 2018, 226, 1252–1272. [Google Scholar] [CrossRef] [Green Version]
- Bedard, J. Development Strategy Document for Solar and Geothermal Energy and Energy Storage at White Sands Missile Range; National Renewable Energy Laboratory, The U.S Department Energy: Golden, CO, USA, 2014.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm Type | Model Type | Ref. | Voltage-Based DR | Battery Dispatch |
|---|---|---|---|---|
| Model-based | Optimization | [15,18,19] | ✓ | |
| [20] | ✓ | |||
| [22] | ✓ | ✓ | ||
| Simulation | [16,17,21,28] | ✓ | ||
| MPC | [25,26,27] | ✓ | ||
| Data-based | MPC | This study | ✓ | ✓ |
| Parameter | Unit | Value | Parameter | Unit | Value |
|---|---|---|---|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thanh, V.-V.; Su, W.; Wang, B. Optimal DC Microgrid Operation with Model Predictive Control-Based Voltage-Dependent Demand Response and Optimal Battery Dispatch. Energies 2022, 15, 2140. https://doi.org/10.3390/en15062140
Thanh V-V, Su W, Wang B. Optimal DC Microgrid Operation with Model Predictive Control-Based Voltage-Dependent Demand Response and Optimal Battery Dispatch. Energies. 2022; 15(6):2140. https://doi.org/10.3390/en15062140
Chicago/Turabian StyleThanh, Vo-Van, Wencong Su, and Bin Wang. 2022. "Optimal DC Microgrid Operation with Model Predictive Control-Based Voltage-Dependent Demand Response and Optimal Battery Dispatch" Energies 15, no. 6: 2140. https://doi.org/10.3390/en15062140
APA StyleThanh, V. -V., Su, W., & Wang, B. (2022). Optimal DC Microgrid Operation with Model Predictive Control-Based Voltage-Dependent Demand Response and Optimal Battery Dispatch. Energies, 15(6), 2140. https://doi.org/10.3390/en15062140