
Realistic Simulation of Sensor/Actuator Faults for a Dependability Evaluation of Demand-Controlled Ventilation and Heating Systems



Abstract
:1. Introduction and Literature Review
- A novel simulation-based fault injection framework combining simulator command techniques and simulation code modifications for realistic and automatic FI;
- The comprehensive coverage of various fault types with different fault attributes, such as fault type, time, duration, persistence, interarrival time, and location;
- The consideration of noise and uncertainty using Gaussian probability distributions with uniform distributions as well as parameter variations upon faults;
- The support of reproducibility for a set of specific fault scenarios or random fault injection scenarios.
2. Methods
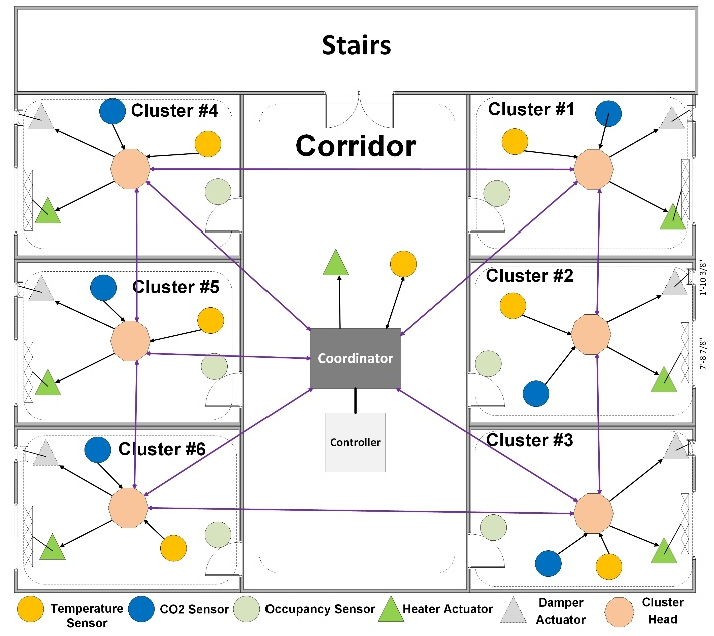
2.1. System Model Description
2.1.1. Faults in HVAC Systems
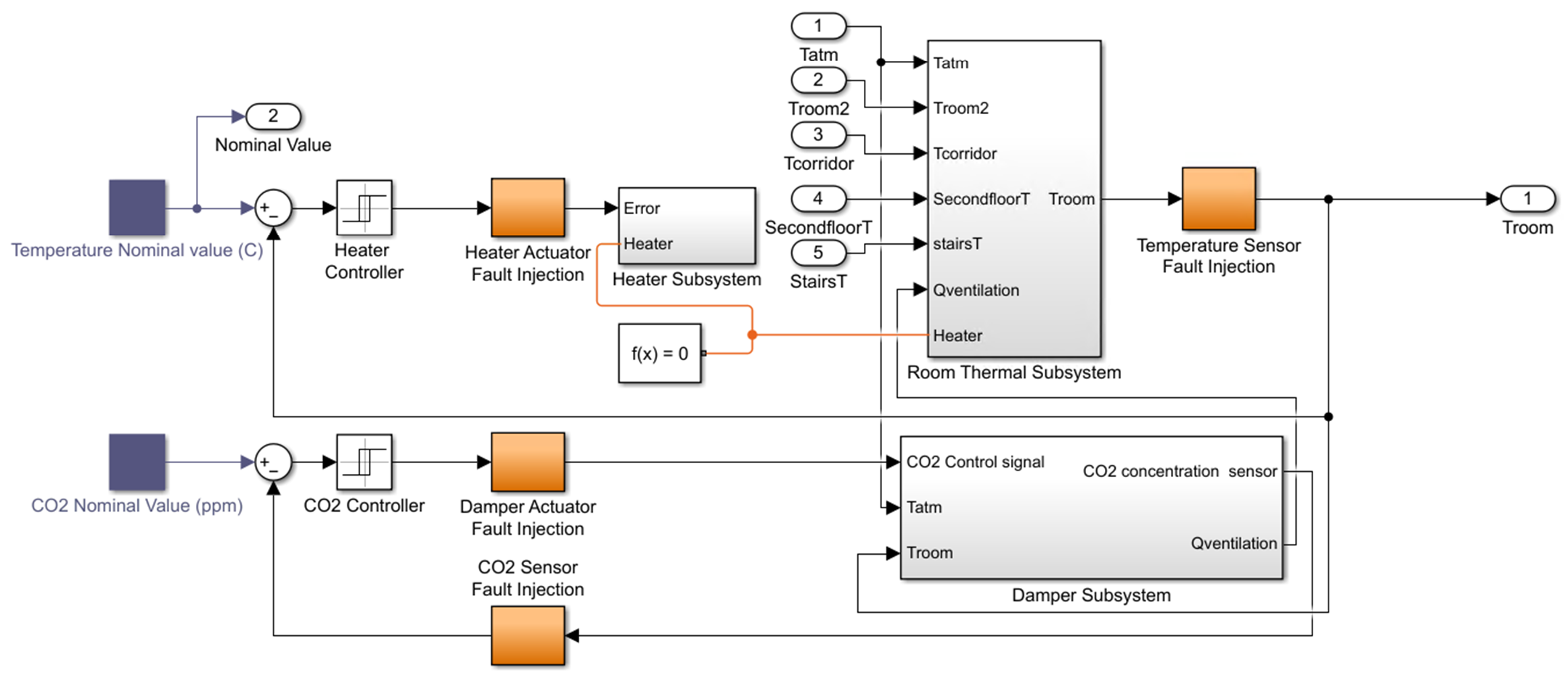
- CO2 sensor fault: The CO2 sensor fault resembles an incorrect sensor reading. Five kinds of faults are considered for the sensor components (refer to fault types in Table 2). A gain fault, offset fault, stuck-at value fault, out-of-bound fault, and data loss fault were considered for the CO2 sensor.
- Temperature sensor fault: This type indicates an invalid sensor reading. A gain fault, offset fault, stuck-at value fault, out-of-bound fault, and data loss fault were considered for temperature sensor (refer to fault types in Table 2).
- Damper actuator fault: This type of fault resembles a stuck-at fault when a damper is stuck at a specific position (closed/open). For example, once the damper actuator sticks to the open state (which is equal to the binary value of 1), the open state of the damper actuator causes fresh air to enter into the indoor environment, which decreases the temperature. Therefore, the heater actuator should constantly to compensate for the heat loss (refer to fault types in Table 2).
- Heater actuator (thermostat) fault: This fault describes a stuck-at fault when the heater sticks to a specific position (off/on). For instance, if the heater is stuck at its ON position, it acquires the binary value 1, which means that the indoor temperature rises. If the heater has a stuck-at fault in the OFF position (binary value 0), the temperature tends to decrease (refer to fault types in Table 2).
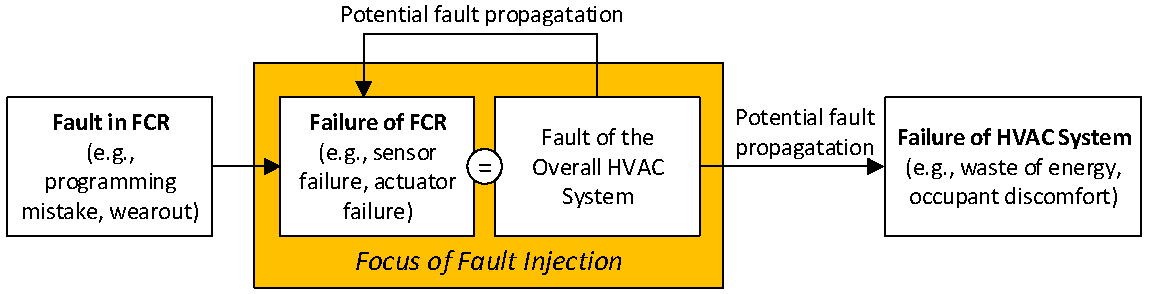
2.1.2. Faults and Failures Descriptions
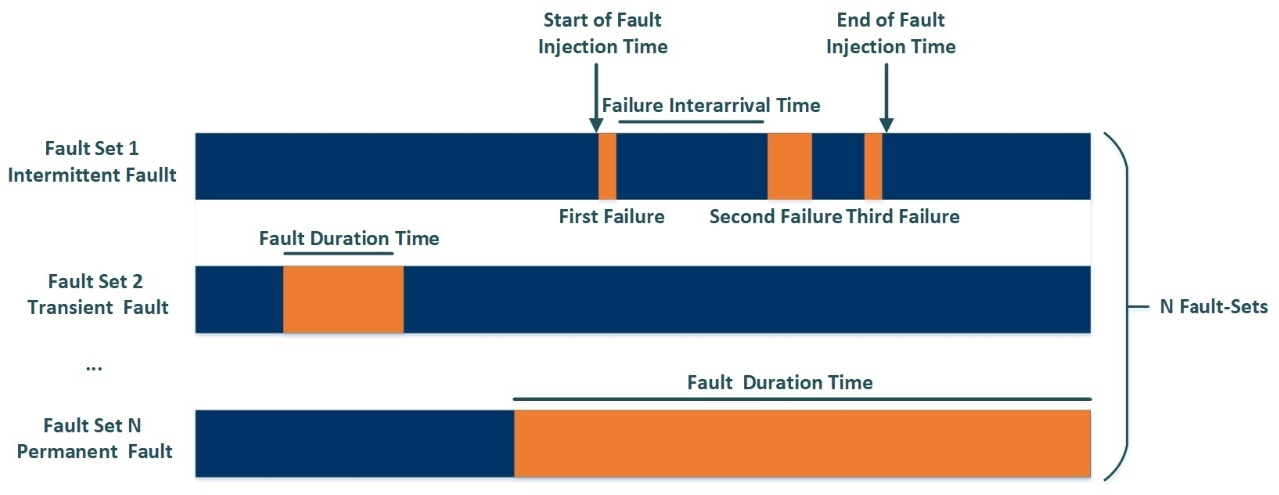
- Permanent fault: They are caused by a defect in a component that requires the repair or replacement of the component. Examples of permanent faults in HVAC systems are a damper stuck at a closed position or a depleted battery in a sensor.
- Transient fault: Transient faults occur far more often than permanent faults, and they are harder to detect [6]. They are usually caused by environmental conditions such as powerline fluctuations, high-energy particles, and electromagnetic interference.
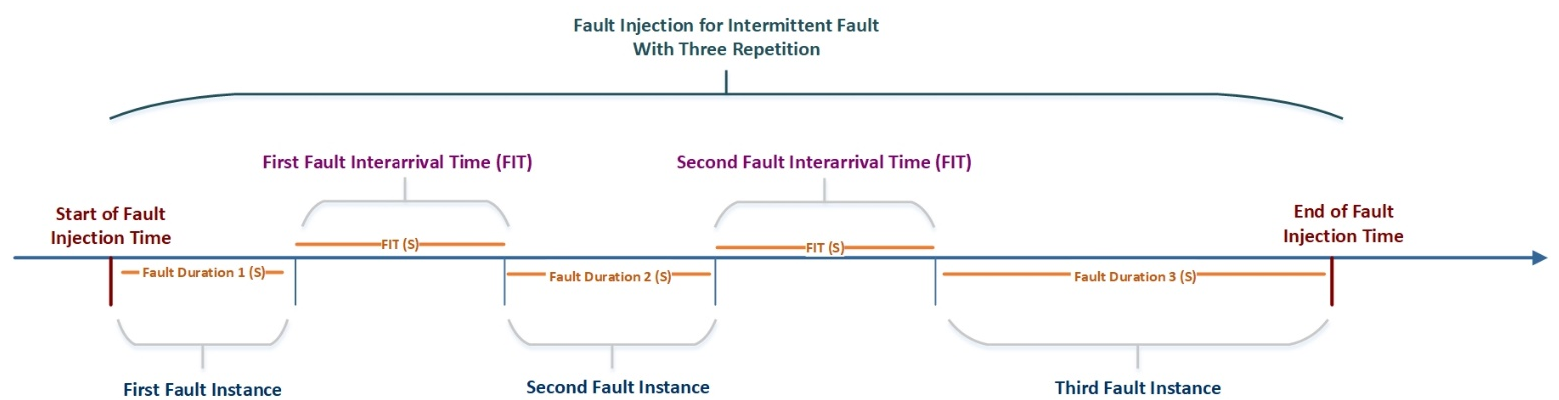
- Intermittent fault: Intermittent faults are temporary malfunctions of a device that are repetitive and occur mostly at irregular time intervals [29]. Intermittent faults have different root causes, such as unstable hardware, varying hardware states, design faults, and wear-out. Intermittent faults can be repaired by replacement or redesign. Most systems incorporate many embedded electronic modules and components to increase the performance of the monitored system. For such complex systems, especially the vehicle industry—trains, ships, and aircraft—intermittent faults become a challenging issue because they increase due to thermal stress, vibration, moisture, and other stresses. In these systems, there are many different reasons for intermittent faults such as loose or corroded wires, cracked solder joints, corroded connector contacst, loose crimp connections, hairline cracks in a printed circuit, broken wires, and unsoldered joints. For example, Wakil et al. discussed intermittent faults and electrical continuity in electrical interconnections [30]. They mentioned some common causes of intermittent faults that can be classified into manufacturing imperfection, connection degradation, interface/coupling, poor design, and intermittent connectivity [30,31]. Examples of intermittent faults in HVAC systems are sensors that are not well-calibrated, software faults, and loose contacts of power or communication lines. In our proposed FI framework, one intermittent fault with two or three repetitions can be modeled. Figure 3 shows the timing diagram of the FI for one intermittent fault with three repetitions. Each fault duration and fault interarrival time was randomly chosen with a uniform distribution.
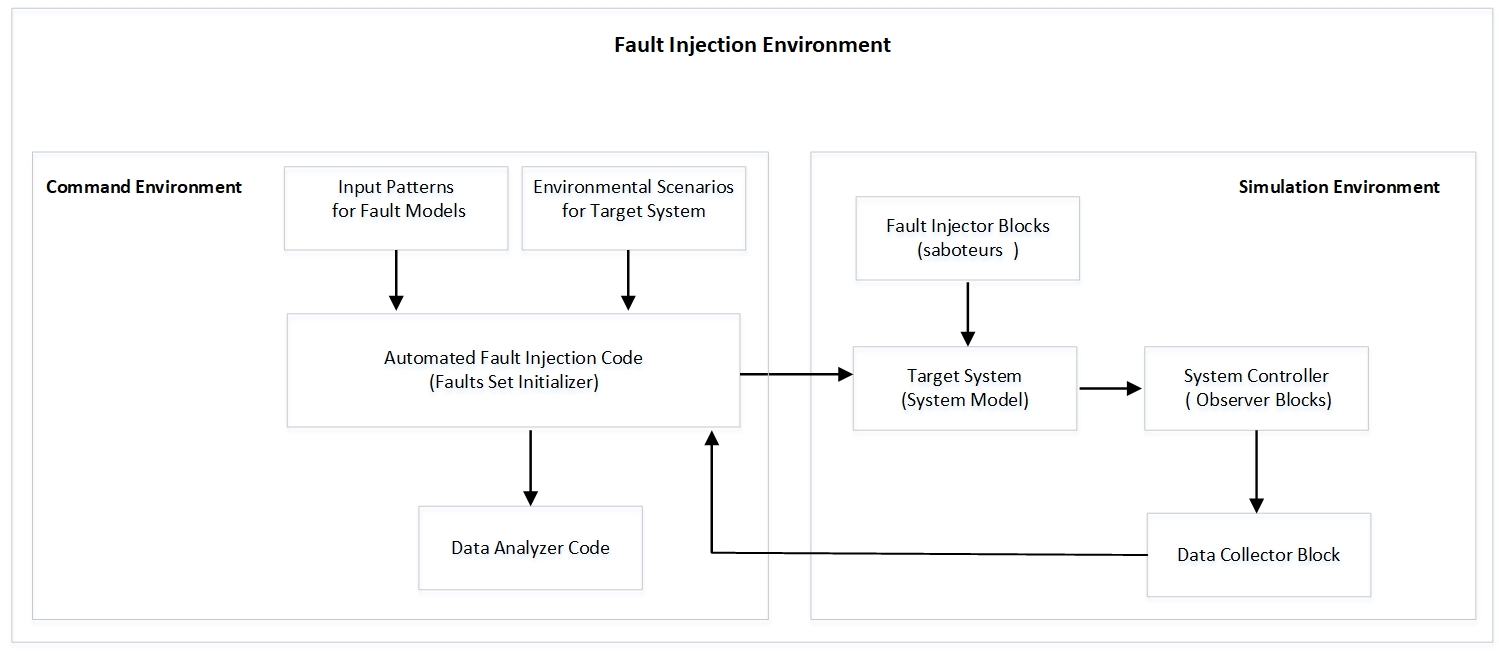
2.2. Generic Fault Injection Framework in HVAC Systems
2.2.1. Command Environment
Input Patterns of Fault Sets
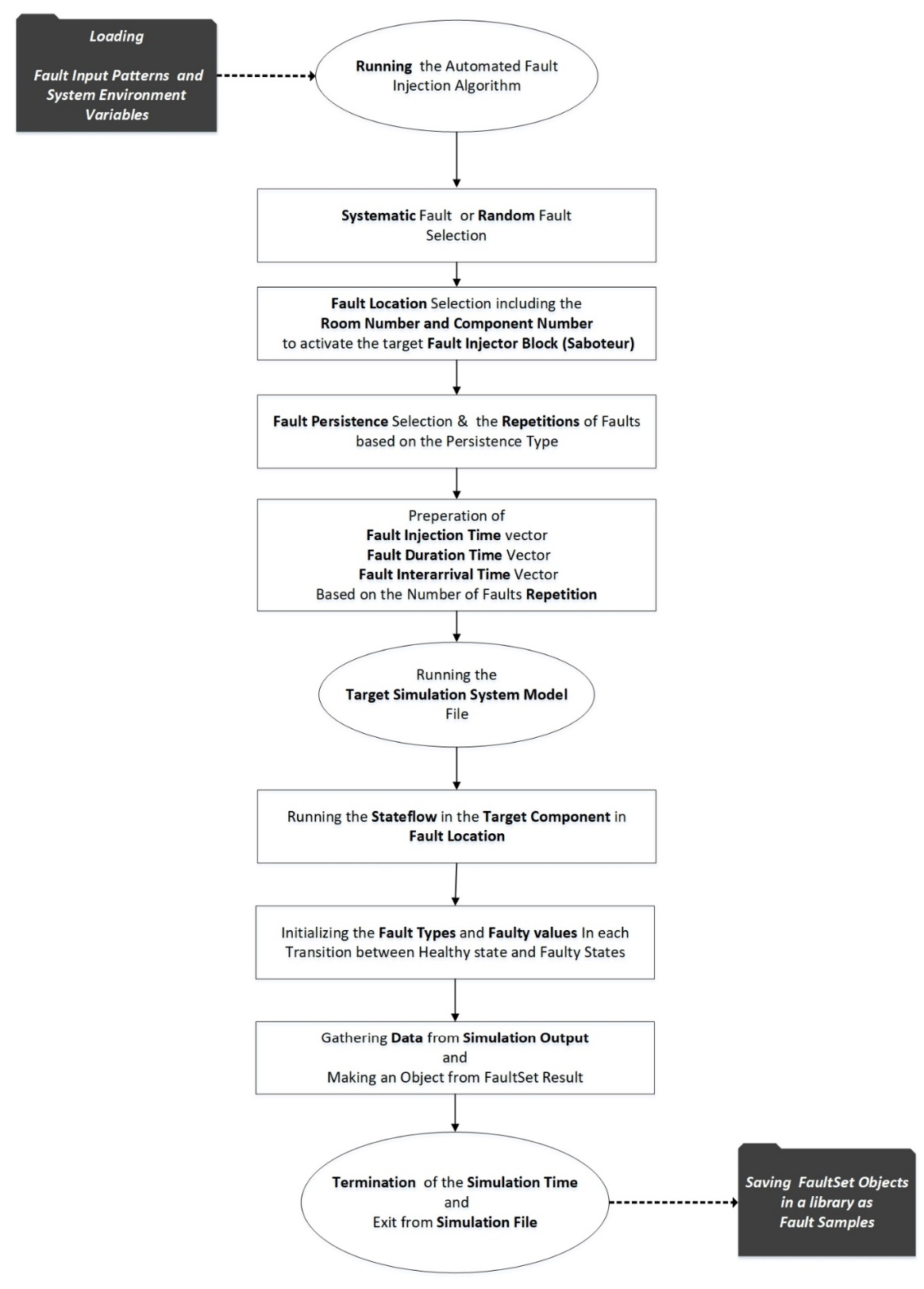
Automated Fault Injection Algorithm
2.2.2. Simulation Environment
Simulation Tools and Model Flow
Target Simulation System
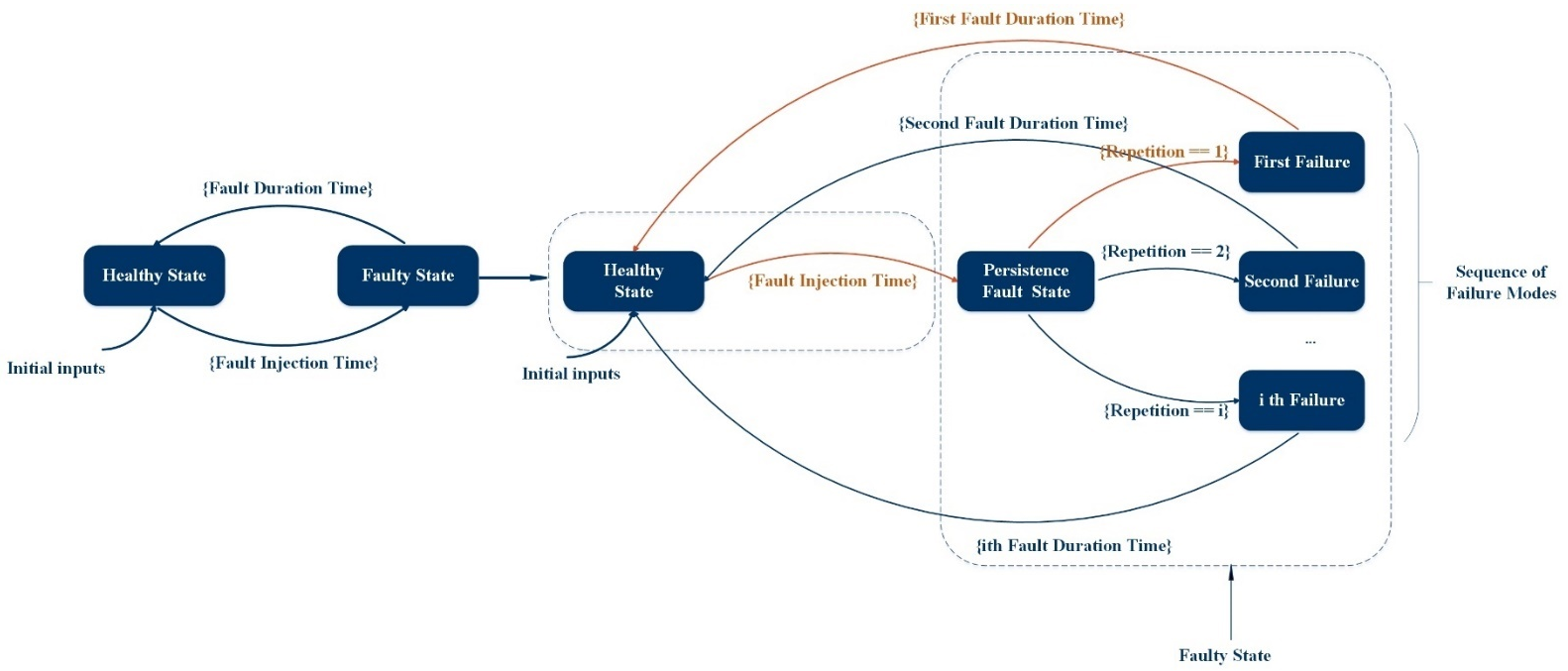
Fault Injector Blocks (Saboteurs)
3. Evaluation, Results and Discussion
3.1. Scenario 1
3.2. Scenario 2
3.3. Scenario 3
3.4. Scenario 4
3.5. Scenario 5
3.6. Scenario 6
3.7. Scenario 7
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sheikh, A.; Kamuni, V.; Patil, A.; Wagh, S.; Singh, N. Cyber Attack and Fault Identification of HVAC System in Building Management Systems. In Proceedings of the in 2019 9th International Conference on Power and Energy System, Peth, WA, USA, 10–12 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Choi, K.; Namburu, S.M.; Azam, M.S.; Luo, J.; Pattipati, K.R.; Patterson-Hine, A. Fault diagnosis in HVAC chillers. IEEE Instrum. Meas. Mag. 2005, 8, 24–32. [Google Scholar] [CrossRef]
- Kooli, M.; di Natale, G. A survey on simulation-based fault injection tools for complex systems. In Proceedings of the 2014 9th IEEE International Conference on Design & Technology of Integrated Systems in Nanoscale Era (DTIS), Santorini, Greece, 6–8 May 2014; pp. 1–6. [Google Scholar]
- Song, N.; Qin, J.; Pan, X.; Deng, Y. Fault injection methodology and tools. In Proceedings of the 2011 International Conference on Electronics and Optoelectronics, Dalian, China, 29–31 July 2011. [Google Scholar]
- Lee, D.; Na, J. A Novel Simulation Fault Injection Method for Dependability Analysis. IEEE Des. Test Comput. 2009, 26, 50–61. [Google Scholar] [CrossRef]
- Ziade, H.; Ayoubi, R.A.; Velazco, R. A survey on fault injection techniques. Int. Arab J. Inf. Technol. 2004, 1, 171–186. [Google Scholar]
- Eslami, M.; Ghavami, B.; Raji, M.; Mahani, A. A survey on fault injection methods of digital integrated circuits. Integration 2019, 71, 154–163. [Google Scholar] [CrossRef]
- Jeong, Y.S.; Lee, S.M. A Survey of Fault-Injection Methodologies for Soft Error Rate Modeling in Systems-on-Chips. Bull. Electr. Eng. Inform. 2016, 5, 169–177. [Google Scholar] [CrossRef] [Green Version]
- Lenka, R.K.; Padhi, S.; Nayak, K.M. Fault Injection Techniques-A Brief Review. In Proceedings of the 2018 International Conference on Advances in Computing, Communication Control and Networking (ICACCCN), Uttar Pradesh, India, 12–13 October 2018; pp. 832–837. [Google Scholar]
- Hsueh, M.-C.; Tsai, T.; Iyer, R. Fault injection techniques and tools. Computer 1997, 30, 75–82. [Google Scholar] [CrossRef] [Green Version]
- Maleki, M.; Sangchoolie, B. Simulation-based fault injection in advanced driver assistance systems modelled in sumo. In Proceedings of the 2021 51st Annual IEEE/IFIP International Conference on Dependable Systems and Net-works-Supplemental Volume (DSN-S), Taipei, Taiwan, 21–24 June 2021; pp. 70–71. [Google Scholar]
- Chao, W.; Zhongchuan, F.; Hongsong, C.; Gang, C. FSFI: A full system simulator-based fault injection tool. In Proceedings of the 2011 First International Conference on Instrumentation, Measurement, Computer, Communication and Control, Beijing, China, 21–23 October 2011; pp. 326–329. [Google Scholar]
- Song, L.; Cai, J.; Li, G. Research on simulation-based testability verification method of radar. In Proceedings of the IEEE 2012 Prognostics and System Health Management Conference (PHM-2012 Beijing), Beijing, China, 23–25 May 2012; pp. 1–5. [Google Scholar]
- Gil-Tomas, D.; Gracia-Moran, J.; Baraza-Calvo, J.-C.; Saiz-Adalid, L.-J.; Gil-Vicente, P.-J. Injecting Intermittent Faults for the Dependability Assessment of a Fault-Tolerant Microcomputer System. IEEE Trans. Reliab. 2015, 65, 648–661. [Google Scholar] [CrossRef] [Green Version]
- Evangeline, C.; Sivamangai, N.M. Evaluation of testability of digital circuits by fault injection technique. In Proceedings of the 2015 2nd International Conference on Electronics and Communication Systems (ICECS), Coimbatore, India, 26–27 February 2015; pp. 92–96. [Google Scholar]
- Salih, S.; Olawoyin, R. Fault Injection in Model-Based System Failure Analysis of Highly Automated Vehicles. IEEE Open J. Intell. Transp. Syst. 2021, 2, 417–428. [Google Scholar] [CrossRef]
- Hyvarinen, J. IEA Annex 25 Final Report, Volume I; VTT: Espoo, Finland, 1997. [Google Scholar]
- Behravan, A.; Obermaisser, R.; Nasari, A. Thermal dynamic modeling and simulation of a heating system for a multi-zone office building equipped with demand controlled ventilation using MATLAB/Simulink. In Proceedings of the 2017 International Conference on Circuits, System and Simulation (ICCSS), London, UK, 14–17 July 2017; pp. 103–108. [Google Scholar]
- Wu, S. System-Level Monitoring and Diagnosis of Building HVAC System; University of California: Merced, CA, USA, 2013. [Google Scholar]
- West, S.R.; Guo, Y.; Wang, X.R.; Wall, J. Automated fault detection and diagnosis of HVAC subsystems using statistical machine learning. In Proceedings of the 12th International Conference of the International Building Performance Simulation Association, Sydney, Australia, 14–16 November 2011; pp. 2659–2665. [Google Scholar]
- Behravan, A.; Mallak, A.; Obermaisser, R.; Basavegowda, D.H.; Weber, C.; Fathi, M. Fault injection framework for fault diagnosis based on machine learning in heating and demand-controlled ventilation systems. In Proceedings of the 2017 IEEE 4th International Conference on Knowledge-Based Engineering and Innovation (KBEI), Tehran, Iran, 27 December 2017; pp. 273–279. [Google Scholar] [CrossRef]
- Behravan, A.; Obermaisser, R.; Abboush, M. Fault Injection Framework for Demand-Controlled Ventilation and Heating Systems Based on Wireless Sensor and Actuator Networks. In Proceedings of the 2018 IEEE 9th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 1–3 November 2018; pp. 525–531. [Google Scholar] [CrossRef]
- Behravan, A. Diagnostic Classifiers Based on Fuzzy Bayesian Belief Networks and Deep Neural Networks for Demand Controlled Ventilation and Heating Systems. Ph. D. Thesis, Universität Siegen, Siegen, Germany, 2022. [Google Scholar]
- Behravan, A.; Tabassam, N.; Al-Najjar, O.; Obermaisser, R. Composability Modeling for the Use Case of Demand-controlled Ventilation and Heating System. In Proceedings of the 2019 6th International Conference on Control, Decision and Information Technologies (CoDIT), Paris, France, 23–26 April 2019. [Google Scholar]
- Behravan, A.; Kiamanesh, B.; Obermaisser, R. Fault Diagnosis of DCV and Heating Systems Based on Causal Relation in Fuzzy Bayesian Belief Networks Using Relation Direction Probabilities. Energies 2021, 14, 6607. [Google Scholar] [CrossRef]
- Behravan, A.; Abboush, M.; Obermaisser, R. Deep Learning Application in Mechatronics Systems’ Fault Diagnosis, a Case Study of the Demand-Controlled Ventilation and Heating System. In Proceedings of the 2019 Advances in Science and Engineering Technology International Conferences (ASET), Dubai, United Arab Emirates, 26 March–10 April 2019; pp. 1–6. [Google Scholar]
- Obermaisser, R.; Peti, P. The Fault Assumptions in Distributed Integrated Architectures; SAE International: Warrendale, PA, USA, 2007. [Google Scholar] [CrossRef] [Green Version]
- Craig, W.C. Zigbee: Wireless Control that Simply Works; Program Manager Wireless Communications; ZMD America, Inc.: Milpitas, CA, USA, 2004. [Google Scholar]
- Syed, W.A.; Khan, S.; Phillips, P.; Perinpanayagam, S. Intermittent Fault Finding Strategies. Procedia CIRP 2013, 11, 74–79. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, W.S.; Perinpanayagam, S.; Jennions, I.; Khan, S. Study on Intermittent Faults and Electrical Continuity. Procedia CIRP 2014, 22, 71–75. [Google Scholar] [CrossRef] [Green Version]
- Kirkland, L.V. When should intermittent failure detection routines be part of the legacy re-host TPS? In Proceedings of the 2011 International Automatic Testing Conference, AUTOTESTCON, Baltimore, MA, USA, 11–15 September 2011; pp. 54–59. [Google Scholar] [CrossRef]
- Abarkan, M.; M’Sirdi, N.K.; Errahimi, F. Analysis and Simulation of the Energy Behavior of a Building Equipped with RESin Simscape. Energy Procedia 2014, 62, 522–531. [Google Scholar] [CrossRef] [Green Version]
- Lee, E.A.; Seshia, S.A. Introduction to Embedded Systems: A Cyber-Physical Systems Approach; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Correcher, A.; García, E.; Morant, F.; Quiles, E.; Rodríguez, L. Intermittent failure dynamics characterization. IEEE Trans. Reliab. 2012, 61, 649–658. [Google Scholar] [CrossRef]
- Non-Directional Intermittent Ground Fault Protection. Available online: https://www.webgreenstation.com/non-directional-intermittent-ground-fault-protection-siprotec-5-siemens-si5034/ (accessed on 13 January 2022).
- Kuflom, M.; Crossley, P.A.; Liu, N. Impact of Pecking Faults on the Operating Times of Numerical and Electro-Mechanical Over-Current Relays. In Proceedings of the 13th International Conference on Development in Power System Protection 2016 (DPSP), Edinburgh, UK, 7–10 March 2016. [Google Scholar]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Fault Profile Characteristics | Simulation Environment | |||
|---|---|---|---|---|---|
| Fault Types | Fault Persistence | Fault Duration | Fault Interveinal Time | ||
| Maleki et al. [11] | Stuck-at value Single bit-flip Double bit flip | Transient Semi-permanent | No | No | SUMO |
| Chao et al. [2] | No | Transient | No | No | SAM |
| Song et al. [13] | Circuit faults | No | No | No | PSPICE and ADS |
| Gil-Tomás et al. [14] | Circuit faults Single or multiple | Intermittent | No | No | VHDL-based fault injection tool (VFIT) |
| Evangeline et al. [15] | Stuck-at bit Stuck-at value Input data word | Transient Permanent 6-bit LFSR | No | Yes | Xilinx software and 4-bit adder and C17 benchmark circuit |
| Behravan et al. [22] | Stuck-at value Stuck-at open/close Stuck-at off/on | Permanent | No | No | MATLAB/Simulink |
| Behravan et al. [21] | Gian fault Off-set fault Stuck-at value Stuck-at open/close Stuck-at off/on | Permanent | No | No | MATLAB/Simulink |
| Behravan et al. [25] | Stuck-at value Stuck-at open/close Stuck-at off/on | Permanent | Yes | No | MATLAB/Simulink and MATLAB/Programming |
| This paper | Gian fault Offset fault stuck-at value Stuck-at open/close Stuck-at off/on Out-of-bound fault Data loss fault | Permanent Transient Intermittent | Yes | Yes | MATLAB/Simulink and Stateflow diagram and MATLAB/Programming |
| Nr. | Fault Profile | Fault Details | Measurement Functions for Fault Types (Equation (1)) |
|---|---|---|---|
| 1 | Fault type |
stuck-at fault (actuators) | x′ = α+ η (Sensors) and x′ = 0 or 1 (Actuators) |
| x′ = βx + η | ||
| x′ = α + x + η | ||
| x′ > θ1 or x′ < θ2 | ||
| x′ = Last measurement of actual value | ||
| 2 | Fault persistence type |
| |
| 3 | Fault duration time | Uniform distribution of intermittent faults | |
| 4 | Fault interarrival time | Uniform distribution of intermittent faults | |
| 5 | Fault repetition |
| |
| 6 | Fault location (FCRs) |
| |
| Nr. | Failures | Impact of Failures | Root Cause (Fault) | FCRs |
|---|---|---|---|---|
| 1 | High-temperature value | Occupant discomfort/waste of energy/fire risk/life risk | Stuck-at/gain/offset/high out-of-bound | Temperature sensor, heater actuator, CO2 sensor |
| 2 | Low-temperature value | Occupant discomfort | Stuck-at/gain/offset/low out-of-bound | Temperature sensor, heater actuator, CO2 Sensor |
| 3 | Wrong temperature value | Occupant discomfort/waste of energy/fire risk/life risk | Stuck-at/gain/offset/out-of-bound/data loss | Temperature sensor, heater actuator, CO2 sensor |
| 4 | High carbon dioxide concentration | Occupant discomfort/life risk/fire risk | Stuck-at/gain/offset/high out-of-Bound | CO2 sensor/damper actuator |
| 5 | Low carbon dioxide concentration | Occupant discomfort/waste of energy | Stuck-at/gain/offset/low out-of-bound | CO2 sensor/damper actuator |
| 6 | Wrong carbon dioxide concentration | Occupant discomfort/life risk/fire risk | Stuck-at/gain/offset/out-of-bound | CO2 sensor/damper actuator |
| 7 | Wrong heater actuator signal | Occupant discomfort/waste of energy/fire risk | Stuck-at/stuck-at off | Heater actuator |
| 8 | Wrong damper actuator signal | Occupant discomfort/life risk/waste of energy | Stuck-at/stuck-at close | Damper actuator |
| Nr. | Properties | Realistic Example for a Fault Set in Automated Fault Injection |
|---|---|---|
| 1 | Number of samples | The number of samples can be randomly defined or manually assigned. Each sample or system execution time is equal to one day or 86,400 s; 30 samples are equal to 30 days (one month) or 60 samples are equal to 60 days (two months). |
| 2 | Model of fault | Random fault happens in one component with different random fault attributes and times. Systematic fault happens in multiple components at the same time and in the same type. |
| 3 | Fault types vector | Fault types are defined as a vector with different IDs: (1: stuck-at, 2: gain, 3: offset, 4: out-of-bound, 5: data loss) |
| 4 | Fault injection time vector | This vector includes the time injections for each FCR failure based on the fault type and its repetitions in one day. In the same way, the first injection time is randomly selected, and others are initialized based on the number of repetitions, fault duration, and fault interarrival times. |
| 5 | Fault injection persistence vector | {Permanent, transient, intermittent} |
| 6 | Repetition vector | {0, 1, 2}; where 0 is for permanent faults, 1 for transient faults, and 2 intermittent faults. |
| 7 | Fault interarrival vector | A vector of minimum fault interarrival time (e.g., 400 s) and maximum fault interarrival time (e.g., 4000 s) that can be selected by the uniform distribution in case of intermittent faults |
| 8 | Fault duration vector | A vector of minimum fault duration (e.g., 300 s) and maximum fault duration (e.g., 3000 s) that can be selected by a uniform distribution in case of transient and intermittent faults |
| 9 | Faulty component (FCR) vector | {1: CO2 sensor, 2: damper actuator, 3: temperature sensor, 4: heater actuator} |
| Current State | Healthy State | Faulty State | |||
|---|---|---|---|---|---|
| Inputs | First Failure Mode | Second Failure Mode | Third Failure Mode | ||
| First injection time and duration time | × | ||||
| First interarrival time | × | ||||
| Second injection time and duration time | × | ||||
| Second interarrival time | × | ||||
| Third injection time and duration time | × | ||||
| Fault Set Nr. | Fault Injection Start Time(s) | Component | Fault Persistence | First Fault Duration(s) | Second Fault Duration(s) (In Case of the Intermittent faults) | Fault Interarrival Time (s) | Fault Type | Fault Co-efficient α | Fault Injection Co-efficient β | Heater Duty Cycle (%) | Heater Energy Consumption (KWH) | Energy Consumption Change (in %) | CO2 Concentration Impact | Temperature Impact |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 150,00 | CO2 sensor | Permanent | - | - | - | Offset fault | 125 ppm | 1 | 62.45 | 64.44 | + 26.67% | √ | √ |
| 2 | 15,000 | CO2 sensor | Permanent | - | - | - | Data loss | Last value | 0 | 41.4 | 42.72 | −13.33 | √ | × |
| 3 | 15,000 | CO2 sensor | Transient | 3000 | - | - | Stuck at | 750 ppm | 0 | 49.51 | 51.1 | +6.25% | √ | × |
| 4 | 15,000 | Damper actuator | Intermittent | 2700 | 600 | 2000 | Stuck at | 1 (on) | 0 | 49.63 | 51.22 | +6.25% | × | × |
| 5 | 15,000 | Damper actuator | Permanent | - | - | - | Stuck at | 1 (on) | 0 | 89.69 | 92.56 | +80% | × | √ |
| 6 | 15,000 | Temperature sensor | Permanent | - | - | - | Stuck at | 16 °C | 0 | 89.83 | 92.71 | +80% | × | √ |
| 7 | 15,000 | Heater actuator | Permanent | - | - | - | Stuck at | 1 (open) | 0 | 47.25 | 48.76 | +80% | × | √ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kiamanesh, B.; Behravan, A.; Obermaisser, R. Realistic Simulation of Sensor/Actuator Faults for a Dependability Evaluation of Demand-Controlled Ventilation and Heating Systems. Energies 2022, 15, 2878. https://doi.org/10.3390/en15082878
Kiamanesh B, Behravan A, Obermaisser R. Realistic Simulation of Sensor/Actuator Faults for a Dependability Evaluation of Demand-Controlled Ventilation and Heating Systems. Energies. 2022; 15(8):2878. https://doi.org/10.3390/en15082878
Chicago/Turabian StyleKiamanesh, Bahareh, Ali Behravan, and Roman Obermaisser. 2022. "Realistic Simulation of Sensor/Actuator Faults for a Dependability Evaluation of Demand-Controlled Ventilation and Heating Systems" Energies 15, no. 8: 2878. https://doi.org/10.3390/en15082878
APA StyleKiamanesh, B., Behravan, A., & Obermaisser, R. (2022). Realistic Simulation of Sensor/Actuator Faults for a Dependability Evaluation of Demand-Controlled Ventilation and Heating Systems. Energies, 15(8), 2878. https://doi.org/10.3390/en15082878