1. Introduction
The three-phase PMSM used in power electronics applications such as electric vehicles, aircraft, trains, and ships offers the advantages of high torque density, high efficiency, and low torque ripple. In recent years, the six-phase PMSM, which divides and uses two three-phase windings, has attracted attention for several reasons compared to the three-phase PMSM [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10]. First, because of the rated limit of a power supply, the inverter rating is limited within a certain range. Thus, when a three-phase PMSM is replaced with a six-phase PMSM, the rated power can be increased with double the power capability [
11,
12,
13,
14,
15]. Second, the six-phase PMSM can be driven in three phases for single-phase or two-phase failure. Moreover, as two solid-state inverters are used, the degree of freedom of the current control is twice that of the three-phase PMSM. As a result, the six-phase PMSM has better fault tolerance capabilities and output power density [
15,
16].
Recently, studies were conducted to discover a method for increasing output power torque through harmonic injection into six-phase PMSM. These studies will be briefly introduced in this paper. The harmonic injection method can be roughly divided into two types. The first is the third-harmonic current-injection method [
17,
18,
19,
20,
21,
22]. Although the output torque is increased under the third-harmonic current-injection method, two neutral points of the three-phase winding must be connected to the middle point of the DC link capacitor, and an inverter leg, an additional current sensor, and a regulator are also required. In the process of providing the path for the third-harmonic injection, if the average voltage of the DC link capacitor is not uniform, and an asymmetric voltage may be generated [
17,
18,
22]. Therefore, additional inverter legs must be used, and additional current sensors and hardware are required to obtain feedback from the third harmonic for effective control. Thus, there are disadvantages related to increasing costs and the space required for lead wires and terminals. As a second method, there is a fifth + seventh-harmonic current-injection method capable of improving the output torque [
8,
9,
10,
14,
23,
24,
25,
26,
27]. The advantage of this method is that it can improve the output torque by changing only the controller without additional hardware compared to the third-harmonic current-injection method. This is because the vector space decomposition (VSD) model is widely used to inject the fifth + seventh-harmonic current [
8,
9,
10,
14,
15]. The VSD model is a method for individually controlling a six-phase machine by decomposing it into a d–q plane for fundamental control and a z1–z2 plane for harmonic injection.
In the literature [
14], the fifth + seventh-harmonic injection method is presented first. In [
8], we identified the inductance harmonics and permanent-magnet (PM) flux linkage harmonics of the motor, modeled the optimal output torque, and presented a fifth + seventh-harmonic injection method using these results. However, an estimation of motor harmonic components is required and cannot be applied to models with inductance harmonic effects in the z1–z2 plane [
23,
24].
In most fifth + seventh-harmonic injection literature, fifth + seventh harmonics are controlled using a resonance controller by creating a sine wave in the order of the sixth harmonic, which is six times the fundamental frequency [
8,
9,
15]. The resonance controller acts as an integrator with infinite gain at the frequency to be controlled. However, since the resonance controller has a narrow frequency band, the gain decreases rapidly if the frequency to be controlled is slightly different from the resonance frequency. When only the resonance controller is used, a steady-state error occurs, which can be supplemented by connecting the PI controller in parallel. When the frequency is low (40 to 60 Hz), appropriate performance is achieved, but when the high frequency to be controlled exceeds the bandwidth of the PI controller, control stability is not guaranteed [
26,
27]. In addition, since the operating frequency of the resonance controller varies depending on the speed of the motor, it is necessary to find the gain value according to the frequency in all cases; otherwise, the system becomes unstable [
25]. When a resonance controller is digitally implemented, a discretization process is required to convert a controller designed in the continuous time domain into a discrete time domain. In many cases, the resonance controller pole features a slight displacement in the discretization of various techniques. Consequently, the use of resonance controller increases design complexity and requires design caution [
25,
26,
27].
Because of the aforementioned resonance controller′s weakness, this paper employs a method to improve control stability and reduce the complexity of the controller by viewing a harmonic component as a DC component and controlling it with a PI controller. A resonance controller was used in the fifth + seventh-harmonic injection method because the fifth + seventh-harmonic components were converted into a sixth sine waveform to consider both the fifth + seventh-harmonic components due to the limitations in the degree of freedom of the z1–z2 plane under VSD theory. Therefore, when the harmonic component is regarded as a DC component and harmonics are injected using a PI controller, only one of the fifth-harmonic or seventh-harmonic components can be injected due to this limitation.
Therefore, after comparing the performance of fifth- and seventh-harmonic component-injection methods through a finite-element method (FEM) simulation, we selected a fifth-harmonic injection method. This paper thus proposes a MTPPC control method that increases the maximum output torque compared to the same current peak through fifth-harmonic injection into each phase current of the stator. A brief description of the fifth-harmonic injection method is as follows. As the required harmonic magnitude and harmonic phase for fifth-harmonic injection, we selected the optimization process using the MATLAB optimization toolbox, which resulted in FFT analysis of an actual stator current including harmonic terms caused by the nonlinearity of an inverter and an error in the motor design process. Additionally, an optimized reference value was applied to the z1–z2 plane, and the fifth-harmonic component was converted into a DC component, controlled the by PI controller. MTPPC control was possible as harmonic injection was performed.
This paper has the following structure.
Section 2 describes the torque equation of the PMSM and outlines in detail how to optimize the harmonic coefficients for fifth + seventh-, fifth-, and seventh-harmonic injection. In addition, an FEM simulation was performed using Altair′s Flux-2D program to analyze the stator phase current and output torque performance according to optimized harmonic coefficients.
Section 3 also describes in detail the current control for the fifth-harmonic injection.
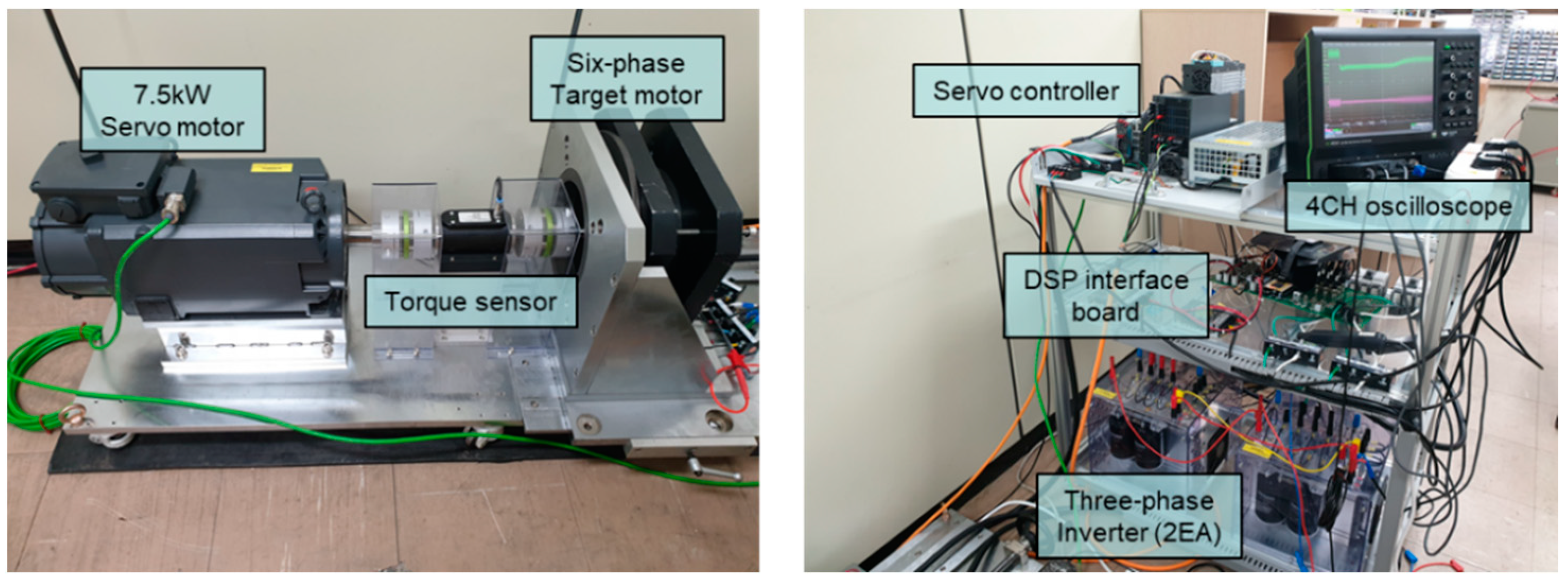
Section 4 analyzes the stator current and output torque performance of the fundamental control method and the fifth-harmonic injection method through experiments using a six-phase PMSM motor manufactured in the laboratory.
2. Analysis of Various Harmonic Injection Methods
2.1. Vector Space Decomposition of the Six-Phase PMSMs
The six-phase PMSM can be decomposed into three two-dimensional orthogonal planes as
,
and
using the VSD method. The
plane has a fundamental
(
n = 1, 2, 3…) harmonics order and is a major factor in actual torque generation. The
plane has a harmonics order of 6
(
n = 1, 2, 3…), which has little effect on torque generation and causes loss. The
plane is a component that causes loss with the 6
(
n = 1, 2, 3…) harmonic order, but when the neutral point of the six-phase PMSM is isolated, the region does not exist. Therefore, controlling the
,
regions based on VSD theory may affect the fundamental and harmonic components. For more information on VSD theory, refer to [
15].
The equation for converting original six-dimensional vector space into three planes based on VSD theory is the six-phase Clarke conversion equation
(Equation (1)). Here,
is 30° because the winding of the six-phase stator ABC, XYZ is shifted by 30° at an electric angle, as shown in [
14]. Equation (2) represents the fixed coordinate system of regions
as a synchronous coordinate system via Park transformation, and
is the rotor angle.
The components of the six-phase stator’s ABC, XYZ winding can be determined by vector
and multiplied by
as in Equation (3) to represent the fixed coordinate system region of
,
,
described above. Since the neutral points are not connected, this process is possible except for the area of
. In Equation (4), the
,
regions are converted into synchronous coordinate systems. In other words, the regions can be converted into the
frame. The harmonic order characteristics are the same and can be expressed as the
vector.
The stator phase voltage, magnetic flux, and torque expressions using VSD are shown in (5)–(7). Detailed expressions of these parameters can be found in [
15,
28,
29]:
where
,
are the stator voltage, stator current, and total linkage flux vectors in the
frame, respectively,
is the phase winding resistance,
is the rotor electrical speed,
are self-inductance in the
,
are self-inductance in the
,
is the output torque,
is the phase number (
= 3, 4, 5…),
is the machine pole number, and
is the fundamental component of the PM flux linkage.
In Equation (7) above, it can be seen that only the parameters corresponding to plane
affect the average torque. Therefore, to examine the effect of the average torque due to the fifth-harmonic injection, PM flux links of each phase are converted into the PM flux link vector Equation (8) at the
frame using Equations (3) and (4):
where
the phase PM flux linkage vectors in the
frame, and
is the electrical rotor position.
In addition, the total average torque can be represented by the cogging torque
component independent of the influence of harmonic current injection and the magnetic coenergy model equation in the
frame [
8,
30]:
Here, Equations (6) and (8) were substituted for Equation (9), and the cross-coupling effect was excluded because it had a negligible effect on the average torque. Finally, the average torque equation can be represented by Equation (10) [
8,
31]:
In Equation (10), the parameters of the
frame affect the average torque through harmonic injection. However, the authors in [
8] used an average torque that can be generated by the
frame itself via harmonic injection. However, since the torque component of the harmonic influence is very small, it is sufficient to consider only Equation (7) composed of the parameters in the
frame. Therefore, increasing the fundamental current component in the
frame proportionally increases the average torque. Therefore, in this paper, we developed a method for improving torque output through increasing the fundamental current component by injecting a fifth-harmonic component. We also analyzed whether the output torque was improved.
2.2. Coefficient of Current Harmonic Methods
As shown in
Section 2.1, by increasing the fundamental current
in
frame proportionally increase the output torque. However, the allowable stator current is determined based on the hardware limitations of inverters and motors. To increase the fundamental component within the limits of the rated current peak value, the peak value of the current is lowered by injecting an appropriate harmonic component. If the fundamental current component is increased by the peak of the lowered current, the output torque is also increased proportionally. However, the harmonic component increases motor loss and torque ripple, so it is important to select the optimized harmonic magnitude and phase to be injected when injecting harmonics. In addition, since the harmonic coefficient is selected based on the fundamental coefficient, the reference currents
for injecting the harmonic current should be input at a constant ratio based on the fundamental reference currents
. Therefore, it is important to appropriately select current
components to improve output torque density. Therefore, we describe a method for selecting the coefficients of fundamental and harmonic components in
Section 2.2.
The ideal stator current for creating a composite waveform of fundamental and harmonic components is provided in Equation (11):
where
is the phase current with the fundamental and harmonic components,
is the fundamental coefficient,
are the fifth- and seventh-harmonic coefficients, respectively,
,
are, respectively, the fifth-harmonic phase angle and the seventh-harmonic coefficient based on fundamental waves, and
is the phase angle of the zero.
Depending on the ratio of the harmonic component, the stator current may appear in various forms. The harmonic coefficient that increases the fundamental current component as much as possible within the current peak limit should be derived through optimization calculations. The fifth + seventh-harmonic injection method should be used to optimize the coefficients, and the fifth + seventh-harmonic injection method should be used to optimize the coefficients, respectively.
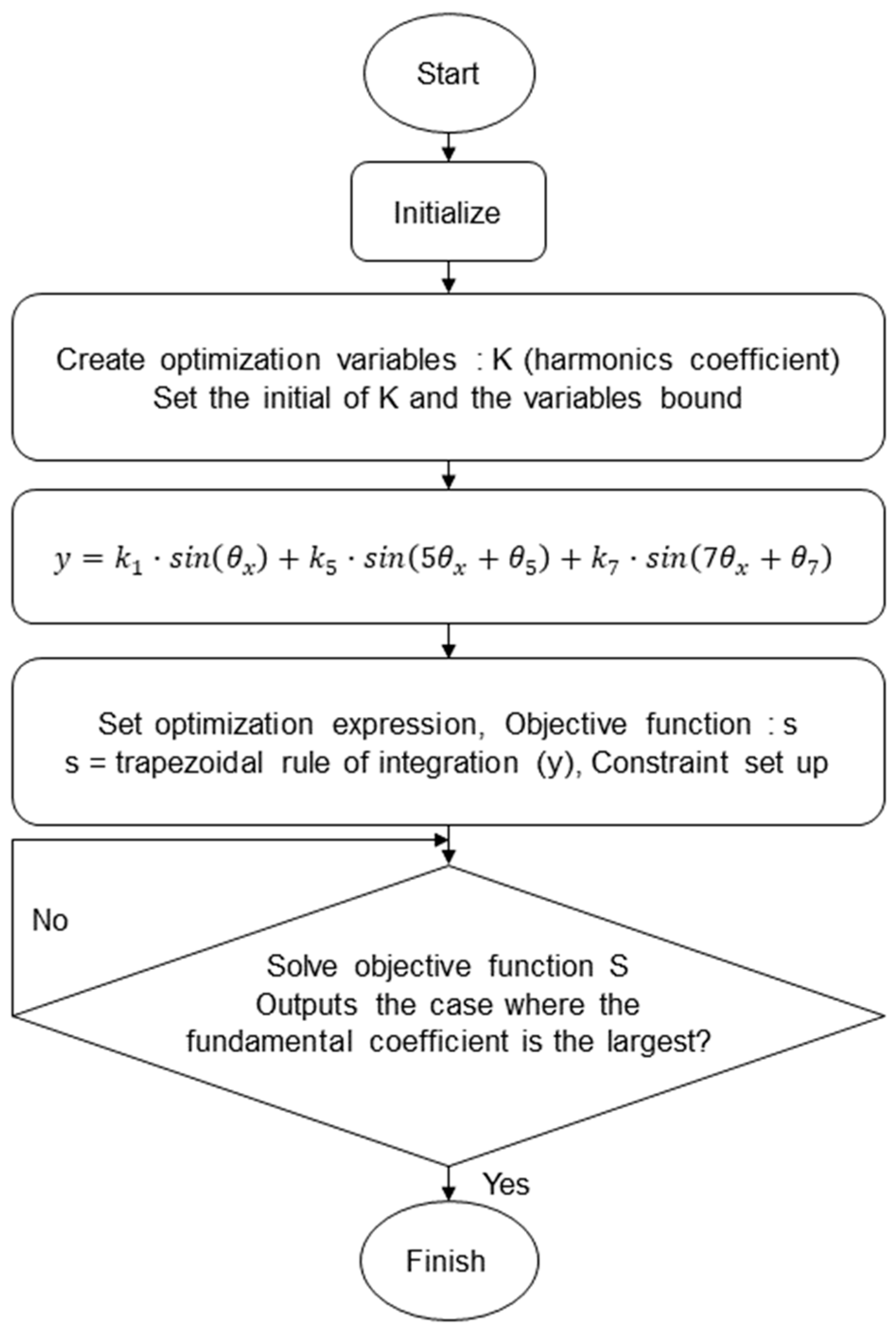
Each coefficient component was selected through the process shown in
Figure 1 using the optimization module of MATLAB. The constraint conditions set in the process of
Figure 1 were as follows: (1) The maximum current peak did not exceed 1 p.u., and (2) the area of 1/2 of the periodic current was maximized. Using the above optimization constraint settings, various forms of current can be generated.
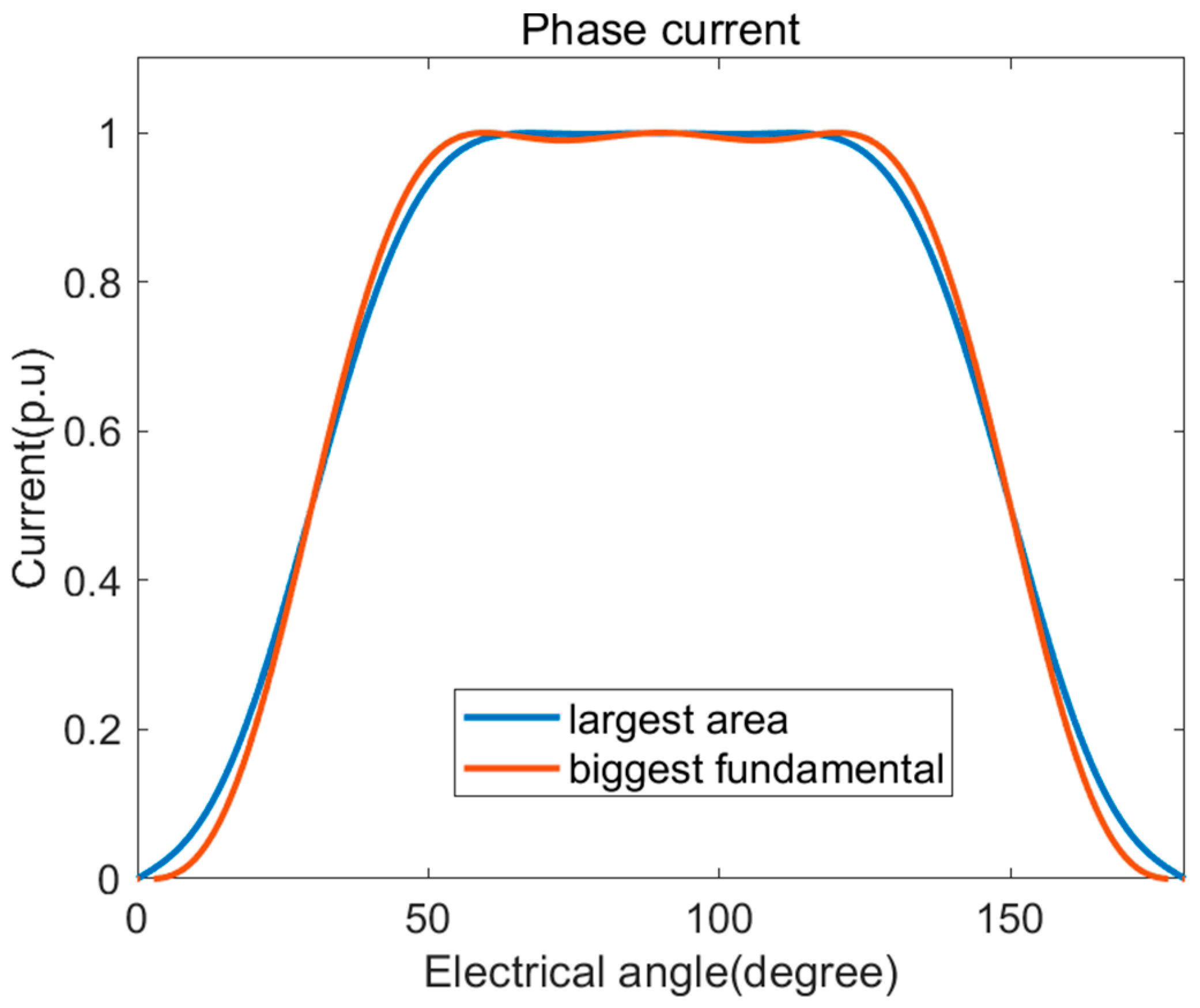
Figure 2 shows the current in two cases where the maximum current range is optimized under the conditions of 0.99 to 1 p.u. One shows the case where the fundamental coefficient is maximum, and the other shows the case where the area of current is the largest. Based on several optimization tests, when the maximum current (peak) range was set close to 1 p.u., it converged into a case with the largest area of current. We calculated the coefficient at which the current achieved the maximum area under the maximum current range conditions of 0.998 to 1 p.u.
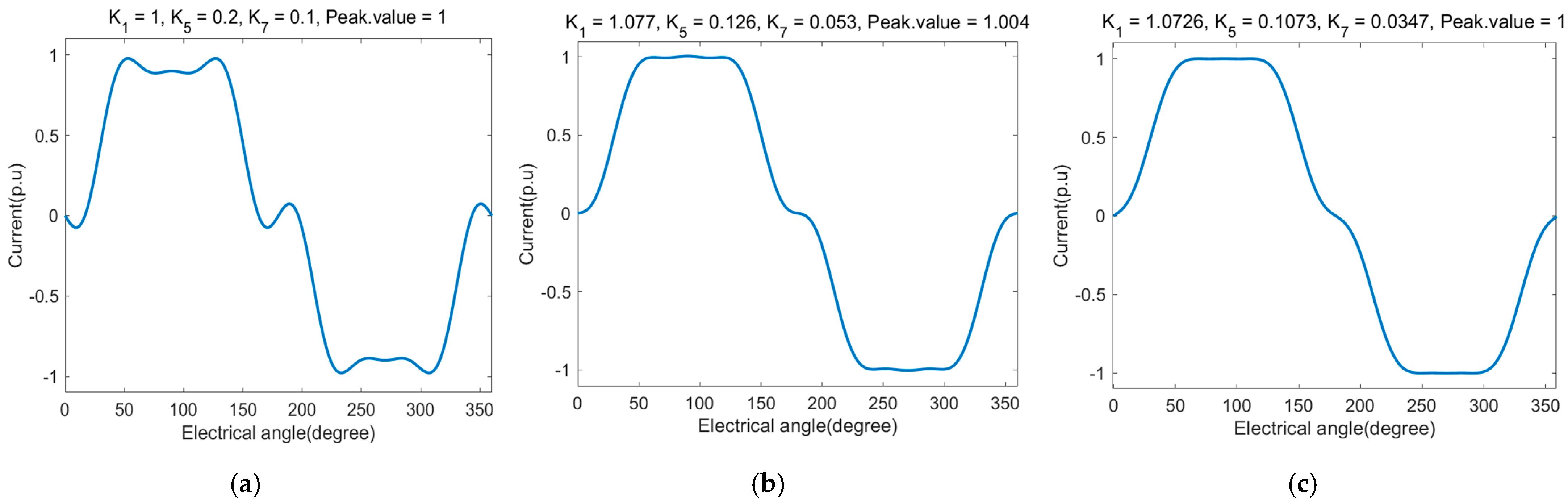
Figure 3a–c shows the currents that were visible during the optimization process.
Figure 3a shows the current as the initial calculated value during the optimization process,
Figure 3b shows the current as calculated when the maximum current range condition is set to 0.996 to 1.004 p.u, and
Figure 3c shows the current as the result of the optimization process convergence.
Table 1 presents the optimized harmonic coefficients determined according to the fifth + seventh-, fifth-, and seventh-harmonic injection methods and the fundamental control methods selected through this process. The fundamental control method controls only the fundamental components of the
frame without harmonic injection.
In
Table 1,
is 1.0726 p.u. for the fifth + seventh-harmonic injection method, 1.0462 p.u. for the fifth-harmonic injection method, and 1.0231 p.u. for the seventh-harmonic injection method. Additionally, based on 1 p.u., the fundamental growth rates are 7.26%, 4.62%, and 2.31%, respectively.
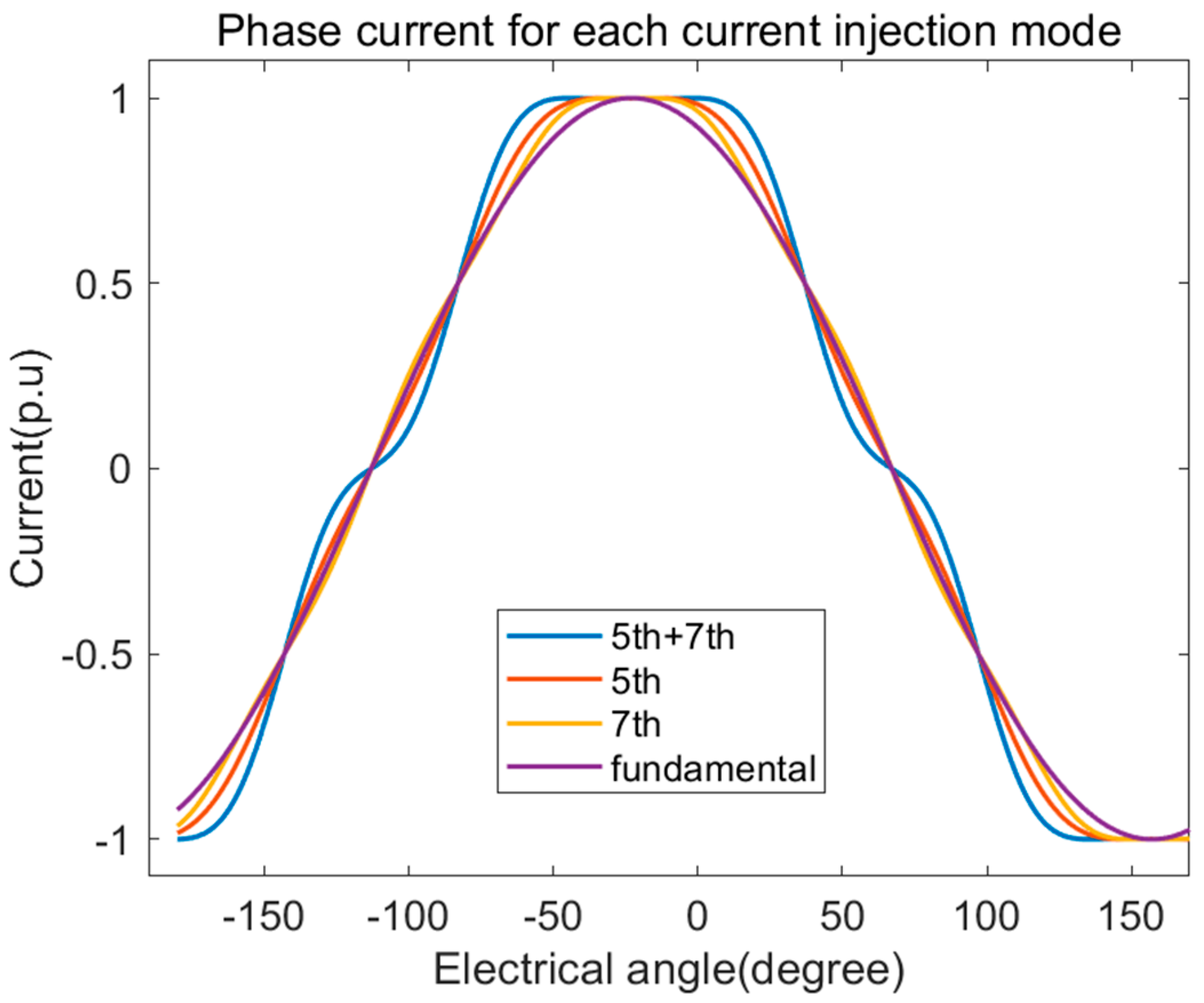
Figure 4 shows the results of the optimized current for each harmonic injection method. It can be seen that the current area is large in the order of fifth + seventh-, fifth-, and seventh-harmonic injection methods under a maximum current of 1 p.u. or less. Therefore, when the current area increases within the maximum current limit by injecting harmonics, the fundamental component also increases. As shown in
Section 2.1, increasing the fundamental component proportionally increases the output torque. Therefore, it is expected that the output torque will also increase in proportion to the current root mean square (RMS). In the next section, we analyze how much the output torque increases within the same current peak limit when the optimized harmonic coefficient is injected into the six-phase PMSM using an FEM simulation.
2.3. Analysis of Current Harmonic Methods Using FEM
To compare the stator phase current and output torque performance of the six-phase PMSM under the various harmonic injection methods, we performed a FEM simulation using the Flux-2D software. To shorten the motor design time, a six-phase PMSM motor was designed using the Lumped parameter method (LPM), which can quickly calculate performance. The detailed design methods and specifications are presented in [
16].
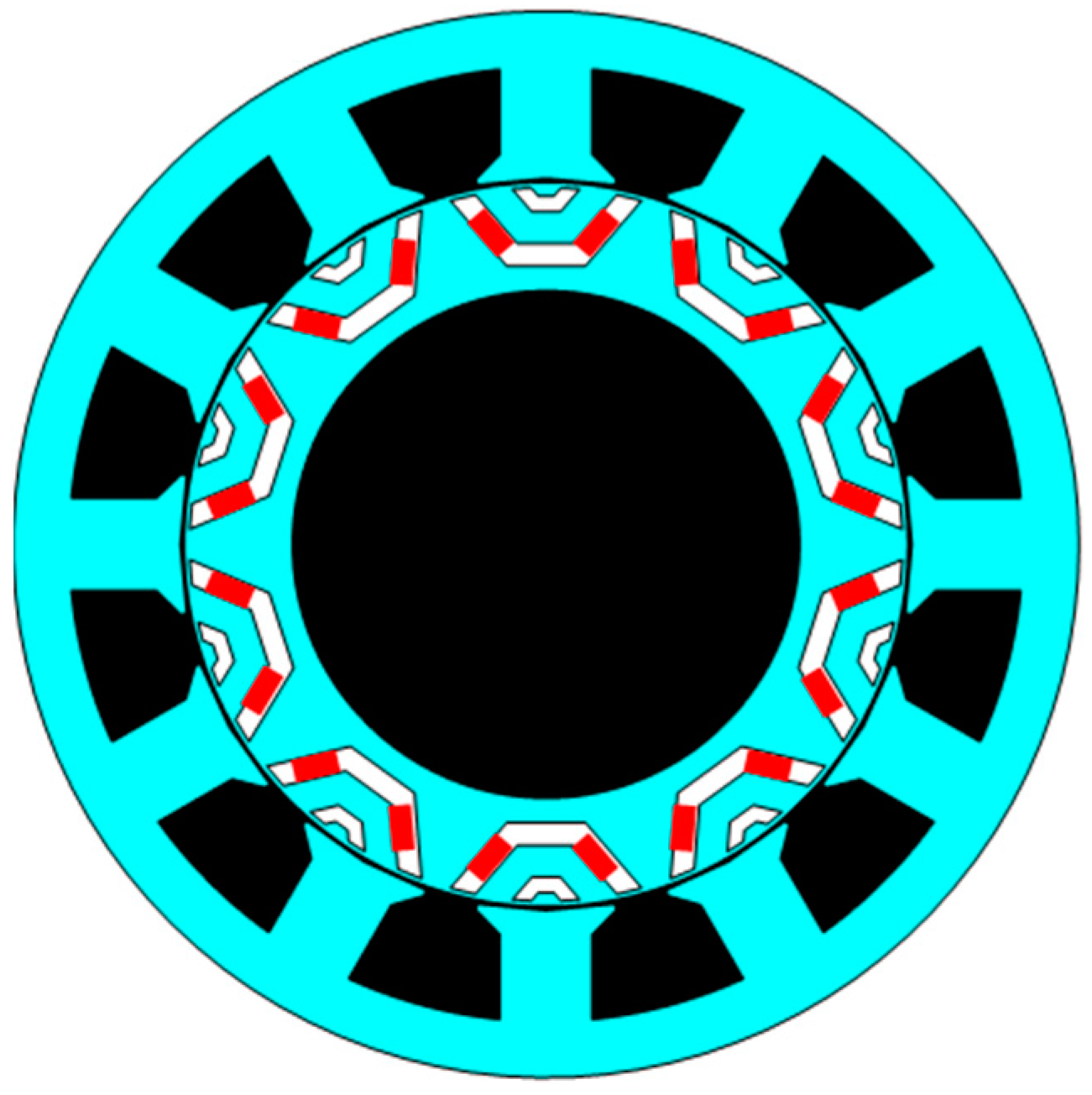
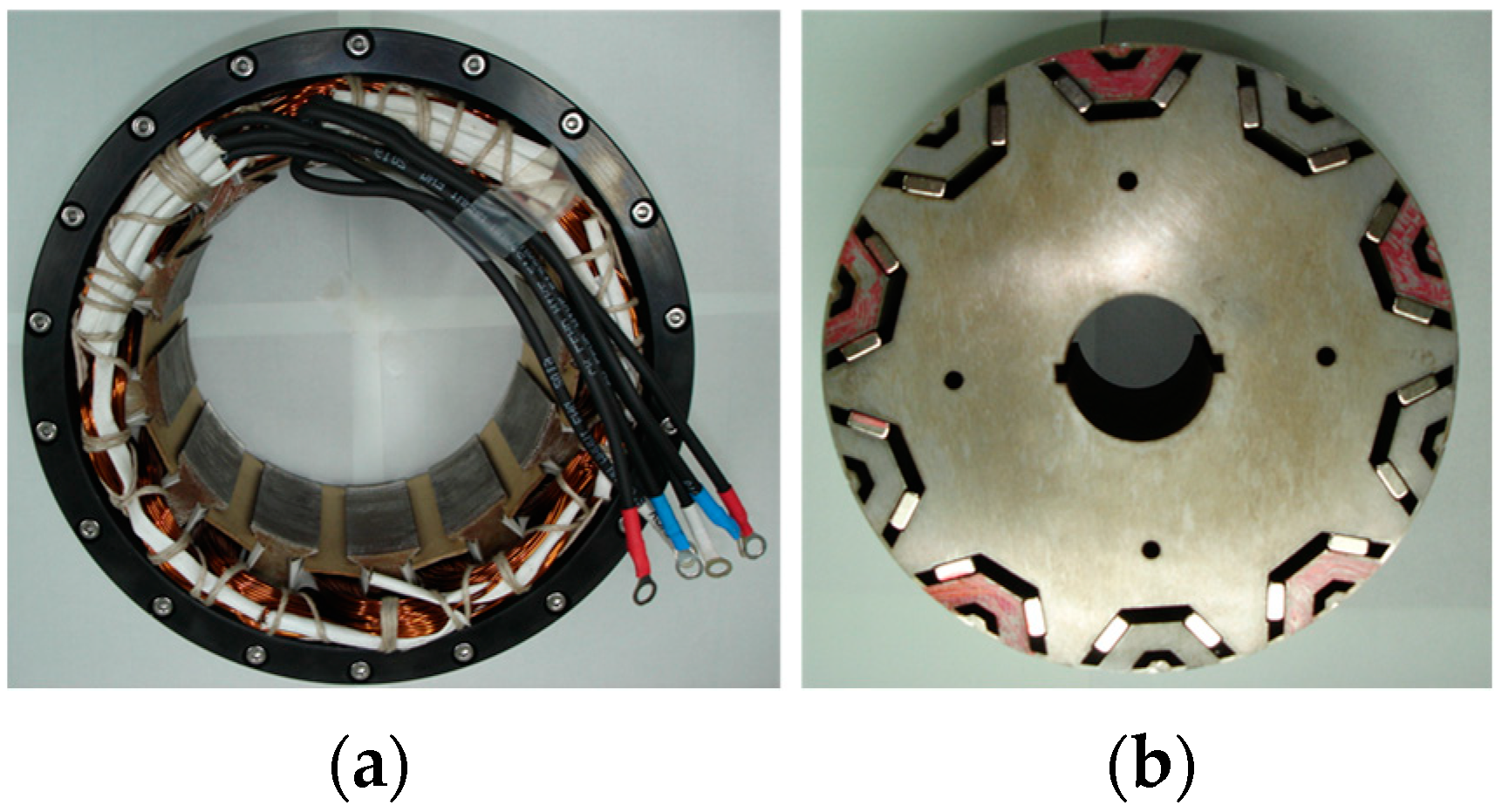
Figure 5 shows the FEM model of the test motor, and the design parameters are listed in
Table 2.
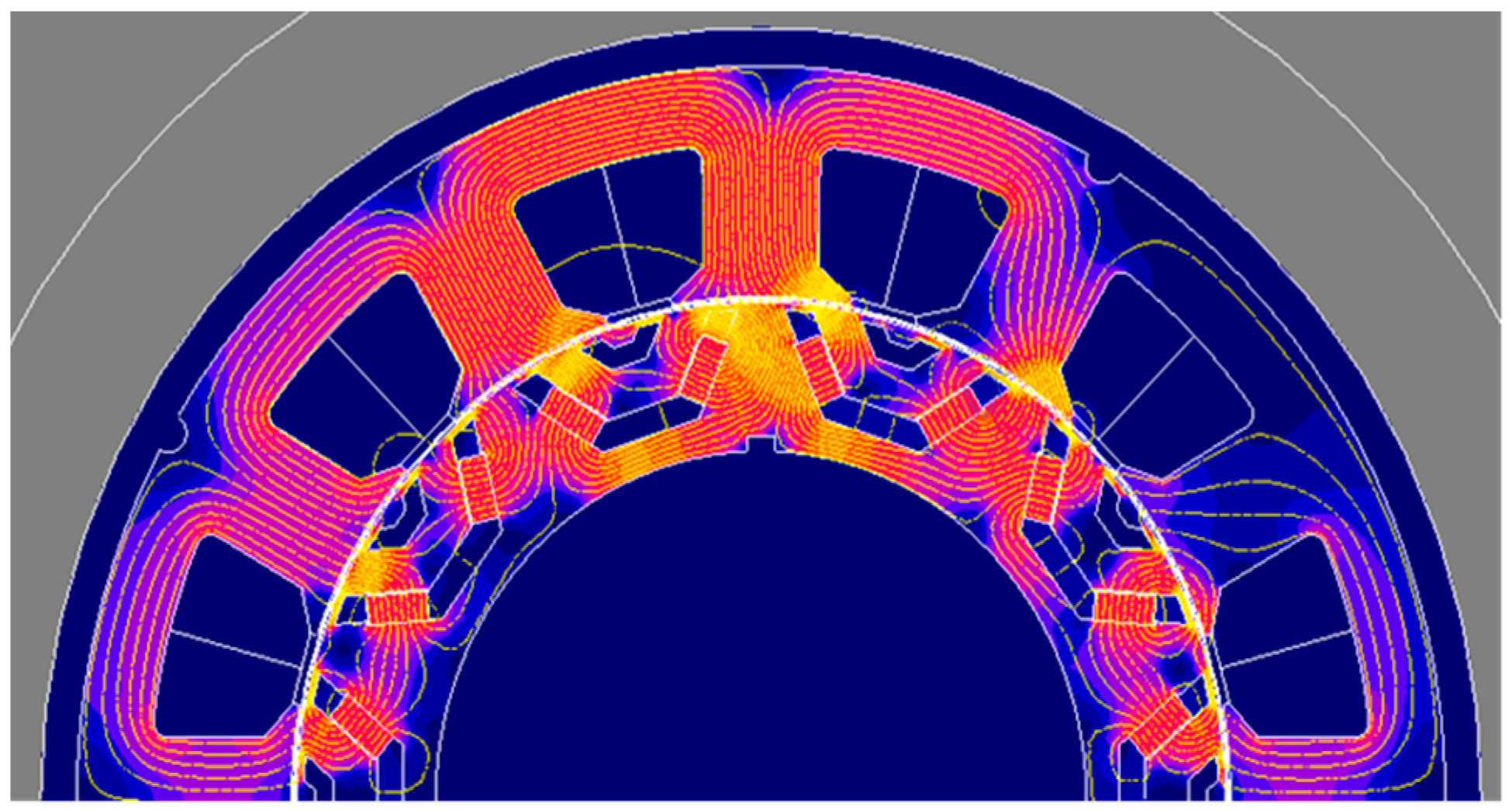
Figure 6 shows the distribution of magnetic flux density under 10 Arms, 5° (load angle), and fundamental operating conditions.
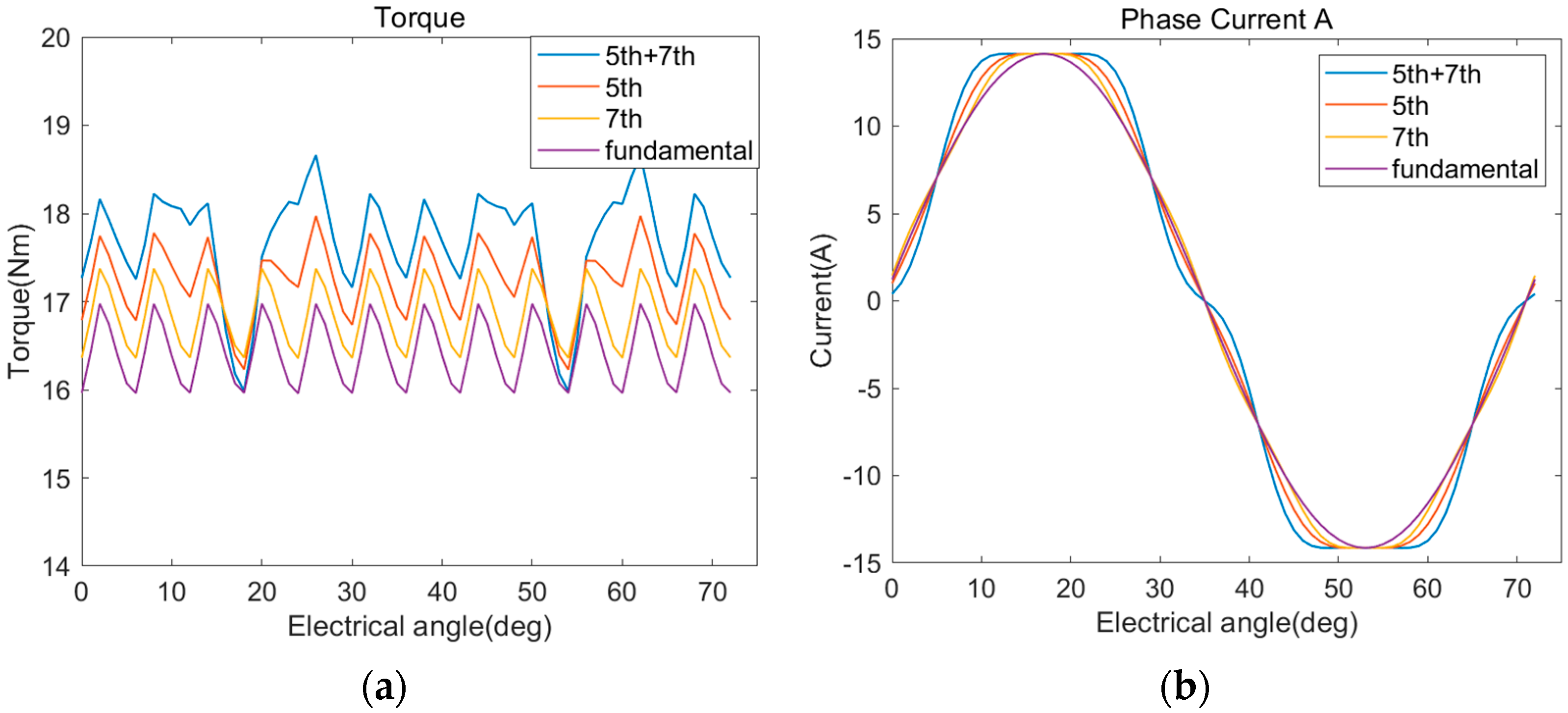
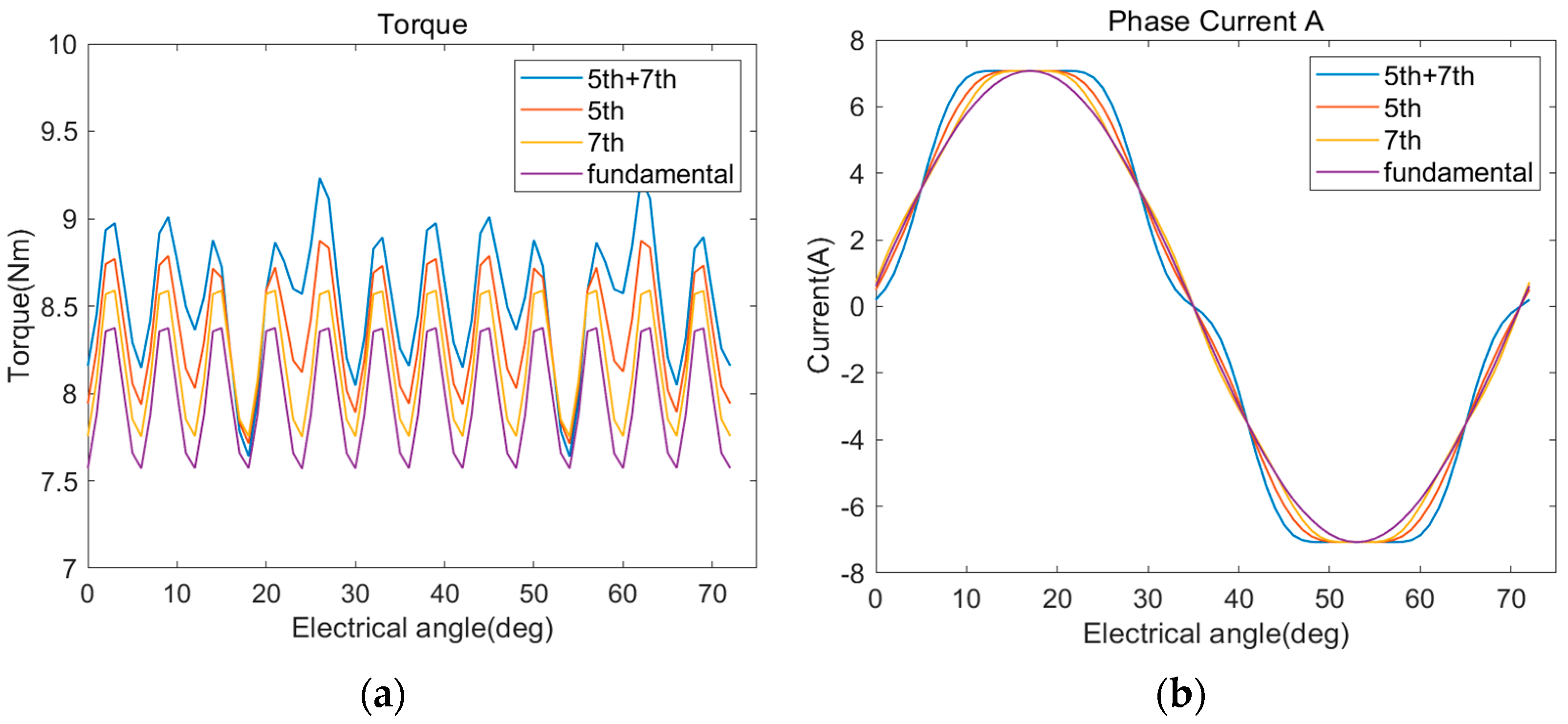
Figure 7 and
Figure 8 show the FEM simulation results of the output torque and A-phase current of the test motor according to the harmonic injection methods under the same load angle of 5° and 480 r/min at 10 and 5 Arm currents, respectively.
Table 3 shows FEM simulation results for phase stator current and output torque according to harmonic injection methods. The optimization coefficients calculated in
Section 2 were used, and the peak values of the current were equally limited to 14.13 and 7.07, respectively. The current RMS values increased by 7%, 4.7%, and 2% based on the fundamental control method for the fifth + seventh-, fifth-, and seventh-harmonic injection methods, respectively. Increasing the fundamental component, i.e., fundamental coefficient, also proportionally increased the average torque. Therefore, the average torque for each injection method based on the fundamental control method increased by 7.5%, 5%, and 2.4%, respectively, under the 10 Arms condition and by 7.15%, 4.64%, and 2.5%, respectively, under the 5 Arms condition. Torque ripple yielded results of 15.16%, 9.88%, and 6.53% under the 10 Arms condition and 18.72%, 13.11%, and 10.17% under the 5 Arms condition.
Here, the harmonic coefficients , provide the harmonic ratio. The fifth + seventh-harmonic injection method harmonic proportion yielded results of 10.73% and 3.47% based on a fundamental magnitude of 1 p.u., and the fifth- and seventh-harmonic injection methods harmonic proportion yielded 4.72% and 2.36%, respectively. Therefore, increasing the harmonic injection coefficient increases the fundamental growth rates, effectively increasing the average output torque, as well as increasing the torque ripple as a trade-off. The fifth-harmonic injection method had a 2.5% lower output torque growth rate compared to the fifth + seventh-harmonic injection method but decreased torque ripple by 5.28%. The fifth-harmonic injection method increased the output torque by nearly 5% compared to the fundamental control method. Both the fifth and seventh-harmonic injection methods can be controlled via a PI controller by converting the injections into DC components using the Park transformation outlined in Equation (4). However, as the rotational speed of the motor increases, the control frequency must increase proportionally. The fifth-harmonic order is five times the fundamental frequency, and the seventh-harmonic order is seven times the fundamental frequency. For this reason, as the control frequency increases, the frequency of the seventh-harmonic components increases rapidly compared to the fifth-harmonic components, deviating from the current control bandwidth. Therefore, since the fifth-harmonic components are lower second order compared to the seventh-harmonic components, the current control band can be secured stably. The current RMS values increased by 4.7%, and 2% based on the fundamental control method for the fifth- and seventh-harmonic injection methods, respectively. The average torque for each injection method based on the fundamental control method increased by 5%, and 2.4%, respectively, under the 10 Arms condition. The fundamental growth rate of the fifth-harmonic injection method can then be doubled compared to that of the seventh-harmonic injection method; therefore, the average output torque growth rate can also be nearly doubled. For this reason, we selected the fifth-harmonic injection method for this study.
3. Control Scheme of Current Harmonic Injection
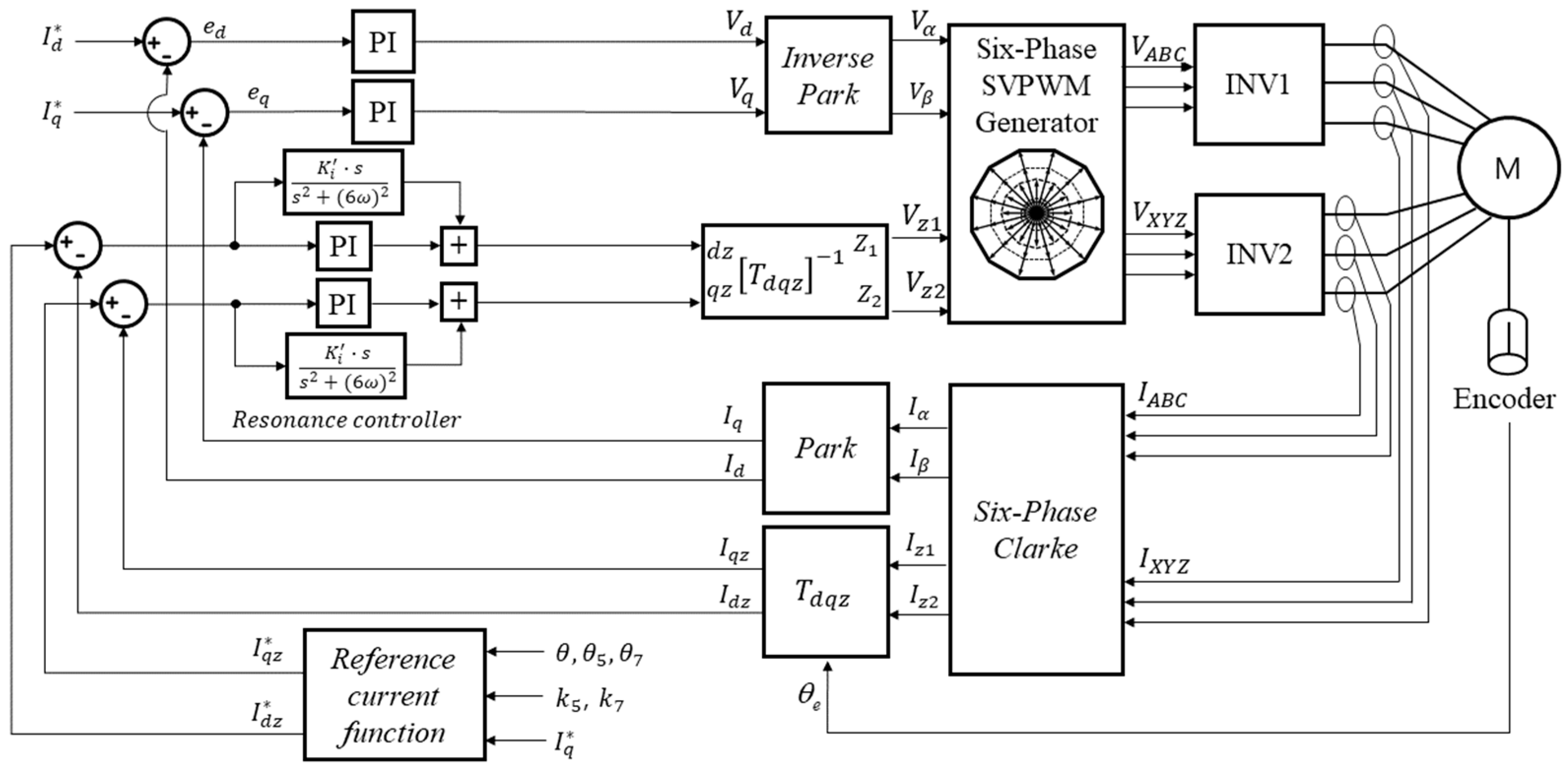
Before explaining the current control scheme for performing the fifth-harmonic injection method, we will briefly explain the fifth + seventh-harmonic injection method. The current control scheme based on VSD with fifth- and seventh-harmonic injection is shown in
Figure 9. Details of the current-injection function and the fifth + seventh-harmonic injection method are presented in [
8,
14]. The reference phase current
,
components are calculated by current and load angle. The feedback phase currents
,
, which are measured current component, are converted into
,
,
,
currents through six-phase Clarke conversion. Then, fundamental current components are converted into
,
currents through Park transformation, and the harmonic current components are then converted into
,
currents through
conversion. The six-phase Clarke conversion results in irregular currents in the fifth- and seventh-harmonic components in the
planes. Then, we convert these harmonic components into a sixth-order sinusoidal form using the
conversion outlined in Equations (12) and (13). This process is used to control the fifth- and seventh-harmonic components simultaneously by converting them into sixth sinusoidal forms.
The harmonic current-injection function for creating the fifth and seventh reference currents requires a separate conversion process to acquire the reference value of the sixth sine wave based on the fifth- and seventh-harmonic factors optimized in
Section 2 [
8,
14]. To control the sine wave, a PI controller for DC component control and a resonance controller for AC component control are applied in parallel.
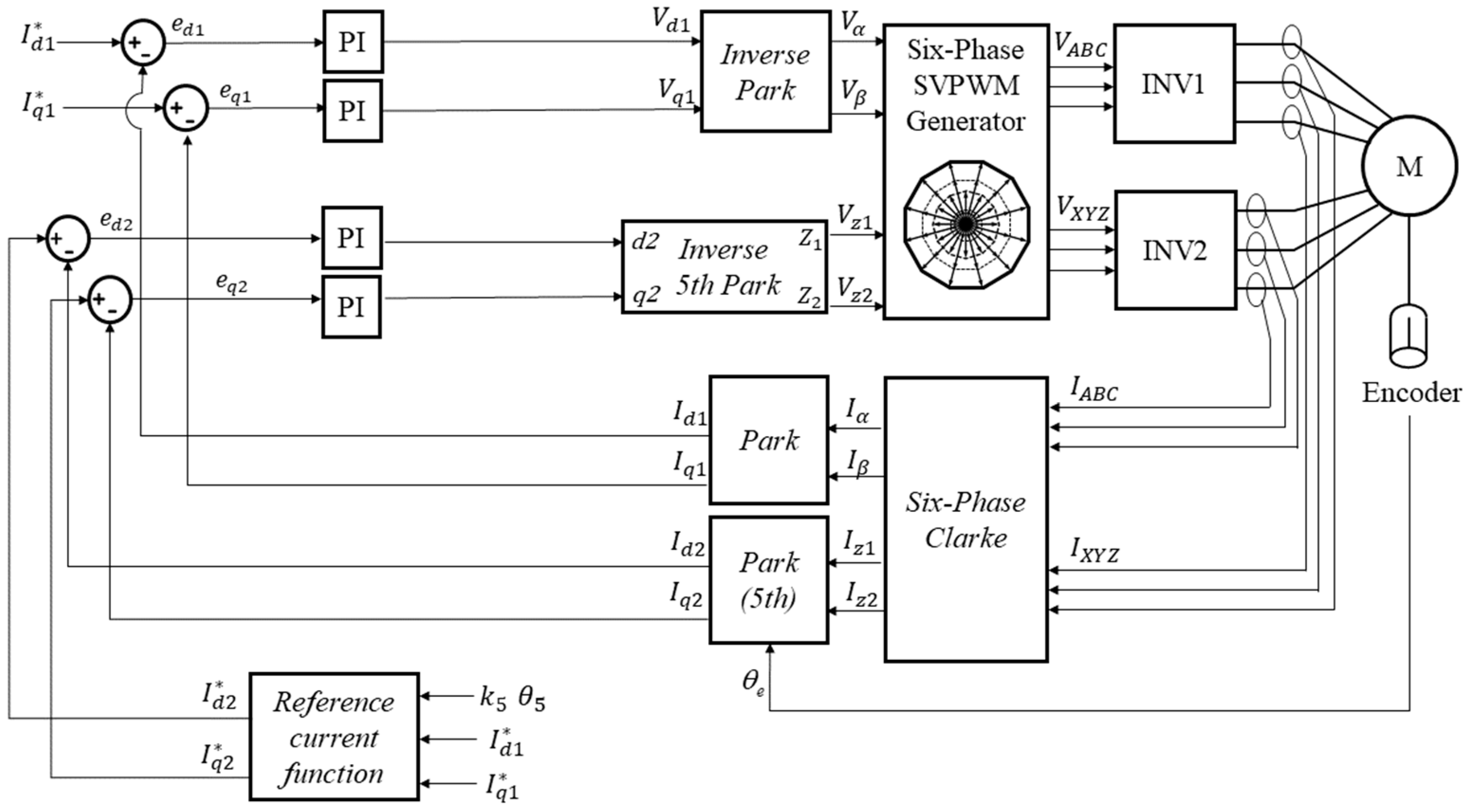
The current control method proposed in this paper does not control the sixth sinusoidal component obtained through
conversion using a resonance controller, but converts the fifth-harmonic component into a DC component through Park transformation and controls it with a PI controller. The current control scheme based on VSD with fifth-harmonic injection is shown in
Figure 10. The feedback phase currents
,
are converted into
,
currents through a six-phase Clarke conversion and Park transformation, but the
,
currents of the fifth-order components must be converted into
,
currents through fifth-order Park transformation. Next, the reference current function is considered the optimized fifth-harmonic coefficient
, and optimized phase angle
and
,
. These
,
components are calculated by current and load angle. In conclusion, reference currents are controlled using Equation (14):
The fifth-harmonic coefficient is a ratio value of the fifth harmonic to be injected based on the fundamental magnitude. Therefore, only the fifth-harmonic coefficient and phase angle to be injected into the fundamental reference need be considered. In addition, since it is difficult to predict harmonic current terms acting on a stator caused by the nonlinearity of an inverter or errors in the motor design process, the magnitude for each harmonic order and a phase-angle measurement process are experimentally required. In this way, the coefficient can be selected through an optimization process by experimentally measuring the magnitude and phase angle for each harmonic current order in the fundamental control method without modeling use of the parameters of a conventional six-phase motor.
If the reference to be injected can be determined, that reference is used in the current control loop. Reference and feedback currents are controlled through a PI controller, and these parameters are used to control an inverter via the SVPWM method after performing fifth-order inverse Park transformation. SVPWM is an inverter switching technique that has been used for a long period of time and is detailed in [
15]. In summary, a resonance controller must be used to control the AC component in the fifth + seventh-harmonic injection method. However, the resonance controller mentioned in the introduction has the disadvantages of increased control instability and design complexity. Thus, we proposed a fifth-harmonic injection method that offers advantages in controller design and stability by controlling the harmonic component with a DC component through a PI controller without using a resonance controller. By applying this optimized coefficient and current control method, it is possible to find a condition in which the maximum average output torque can be obtained within the same current peak limit, which will be experimentally demonstrated in the next section.
5. Conclusions
In this paper, we proposed a method to improve the output torque of a six-phase PMSM within the same current peak limit using a fifth-harmonic injection for each phase current of the stator. Existing methods to improve output torque through fifth + seventh-harmonic injection use a resonance controller to control the harmonic component. However, due to the narrow control bandwidth, there are disadvantages to this method, such as controller instability and design complexity in the discretization process. To solve these issues, we converted the fifth-harmonic component into a DC component and controlled it via a PI controller due to the limitations of control freedom in VSD theory and to ensure a stable current control bandwidth. The fifth-harmonic reference used to perform the fifth-harmonic injection considered the stator current harmonics caused by the nonlinearity of the inverter and errors in the motor design process. In addition, the results obtained through FFT analysis of the harmonic components were used in the required fifth-harmonic optimization process.
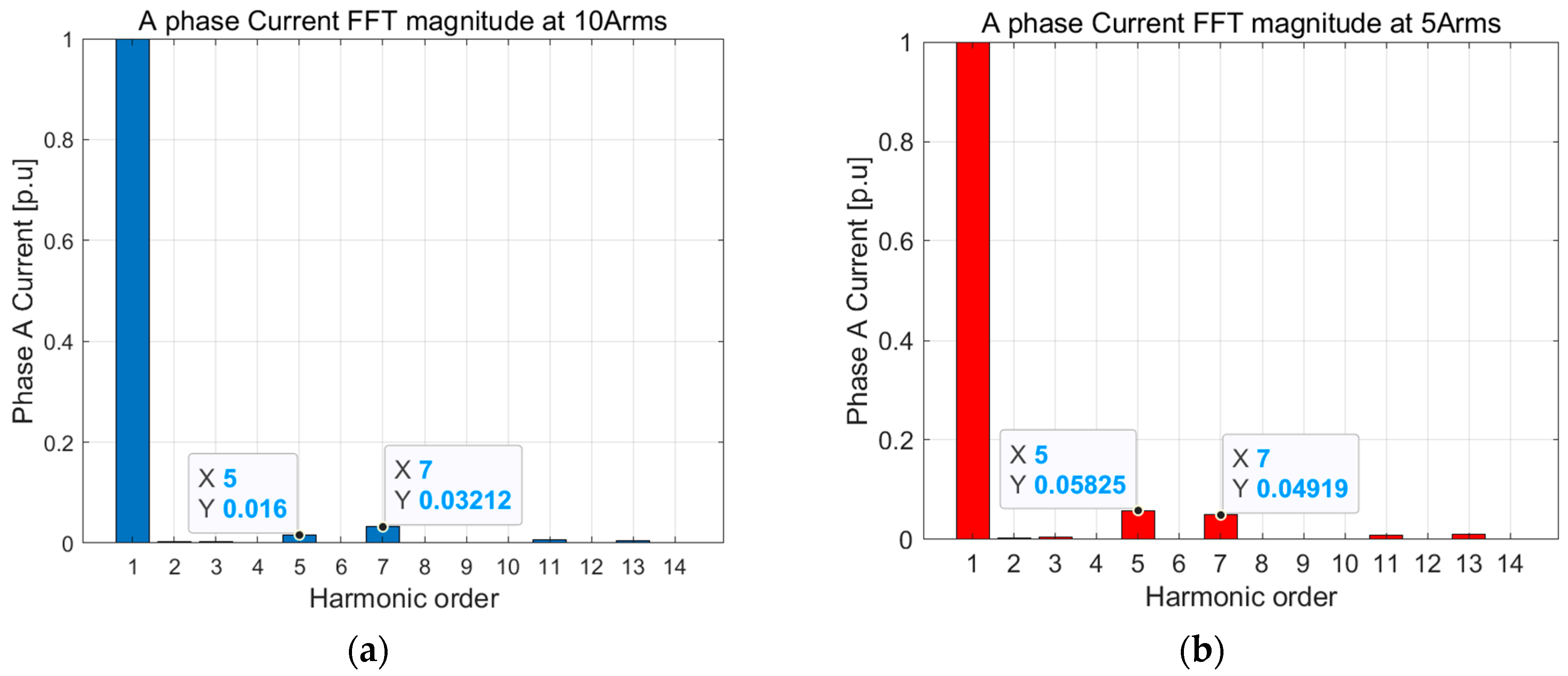
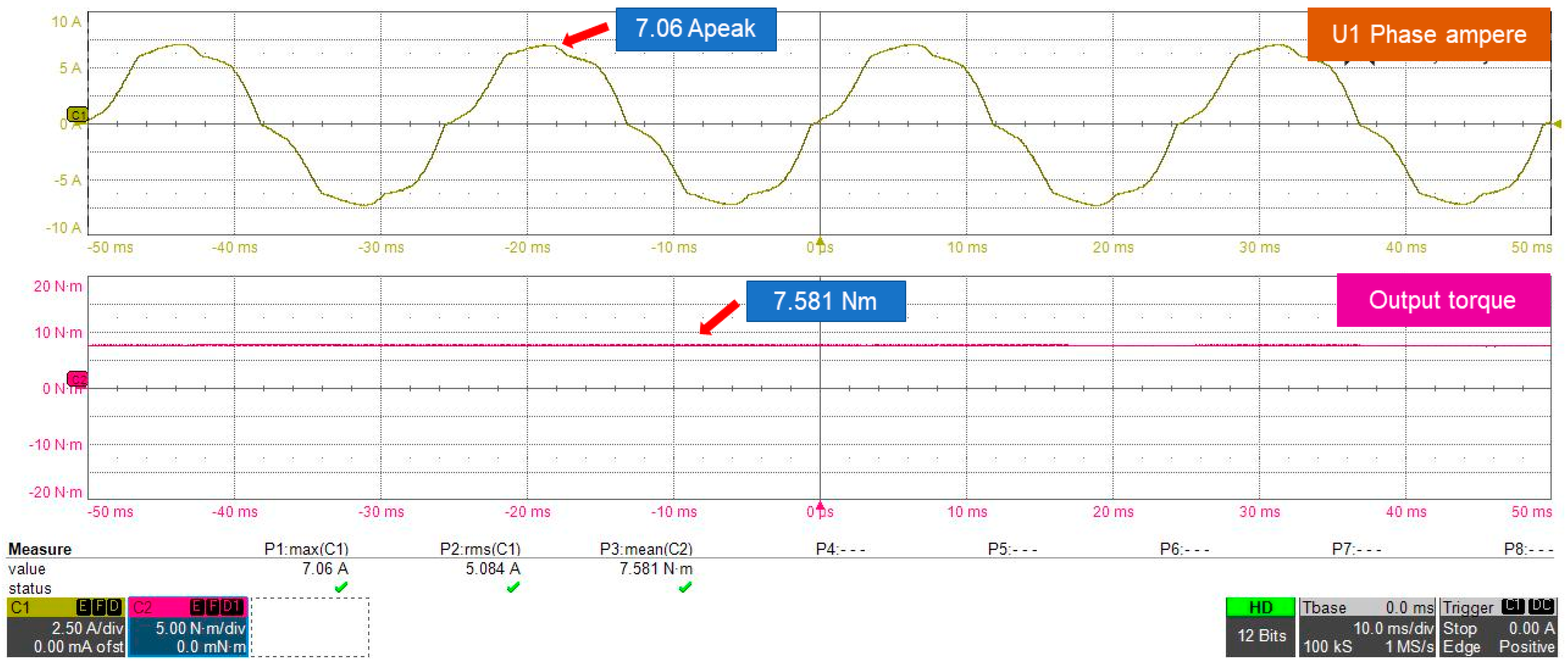
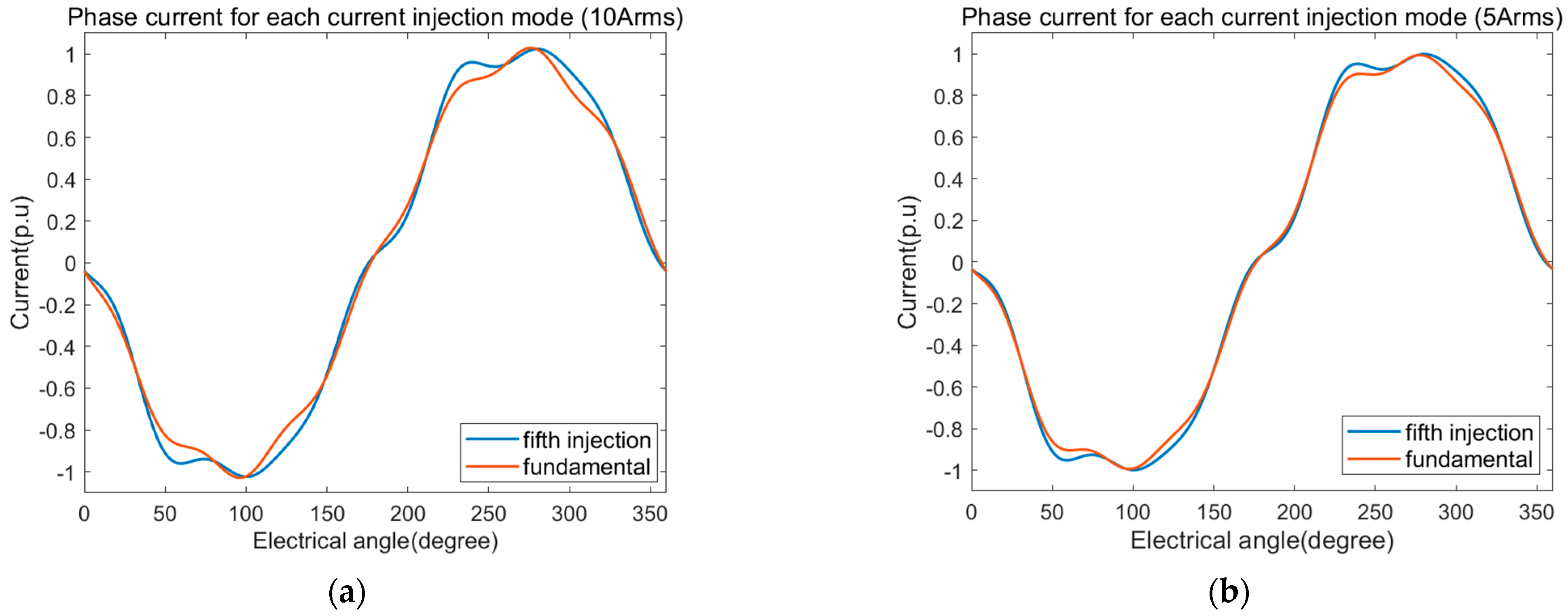
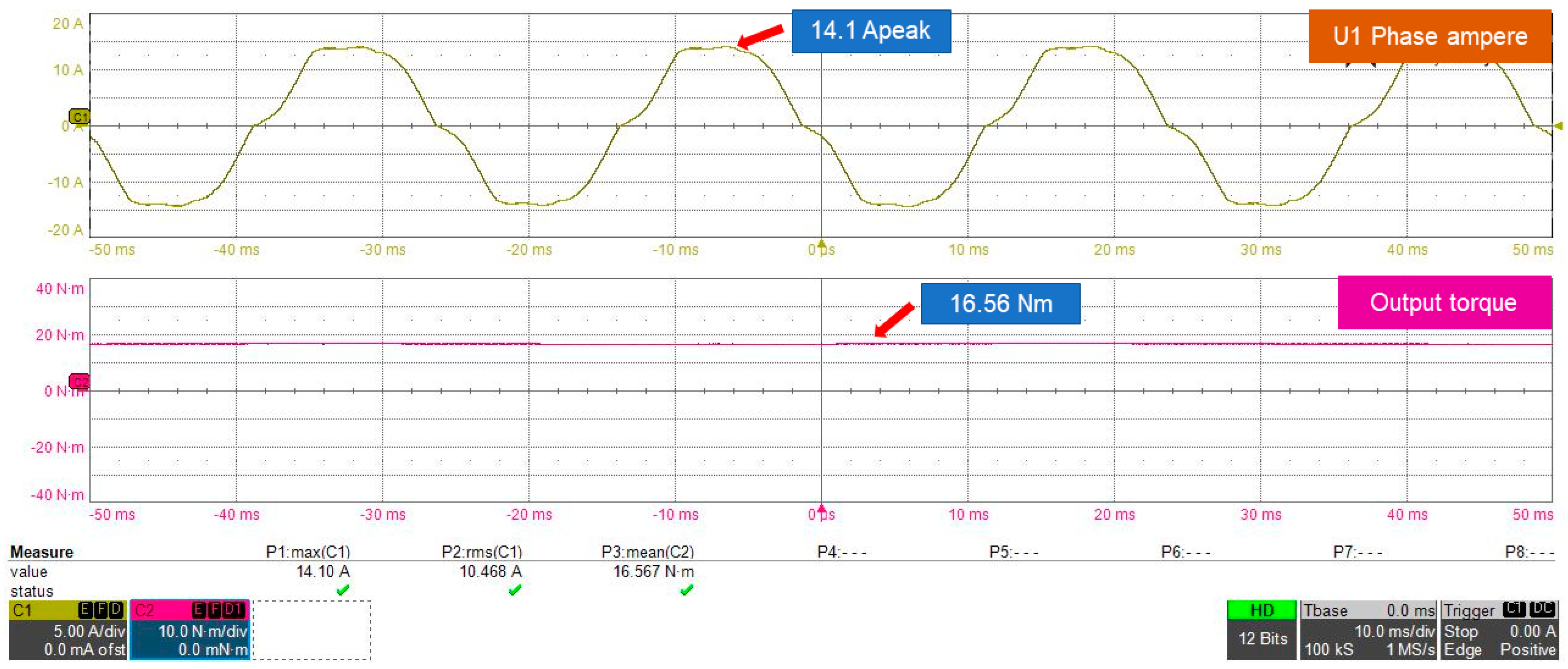
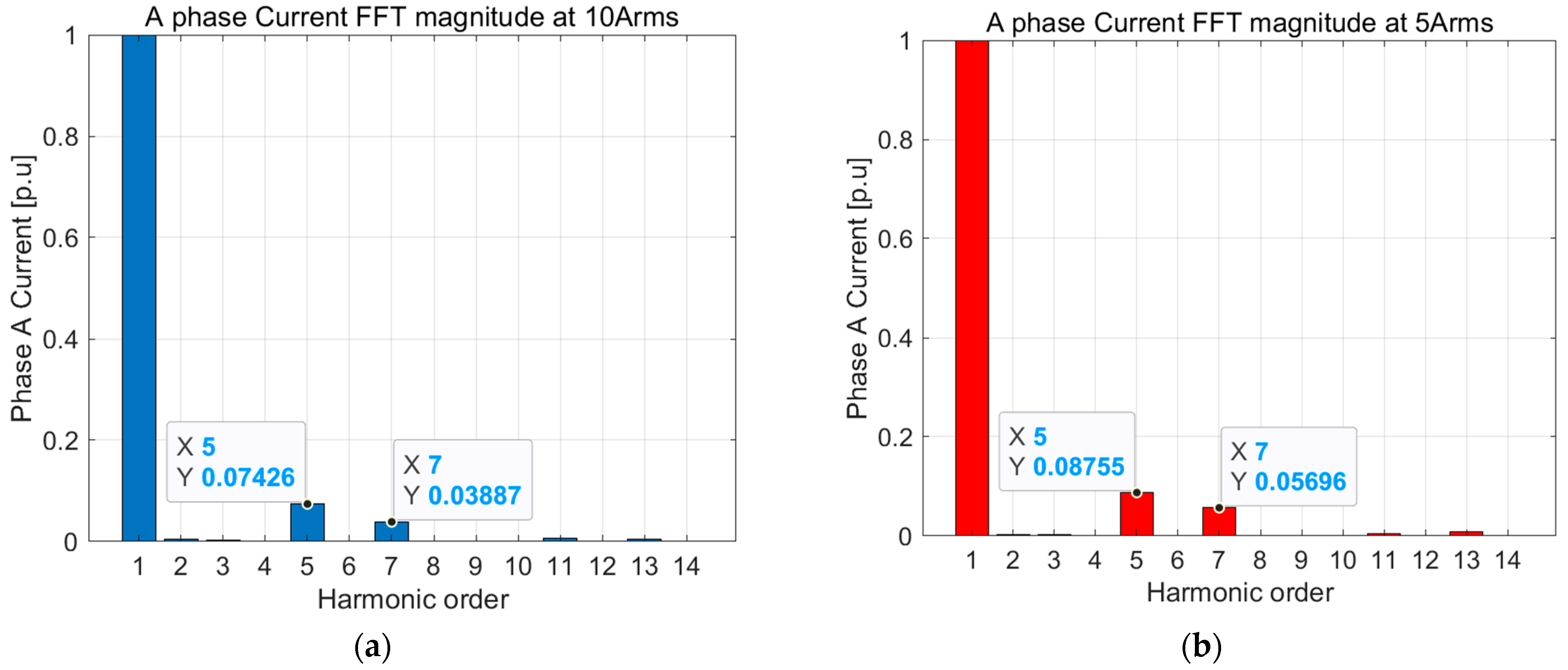
The experiment and FEM simulation were conducted based on a previously designed six-phase PMSM model. In the FEM simulation, under a rated current of 10 Arms for the motor, the fifth-harmonic injection method provided an output torque increase rate about 2.5% lower than that of the fifth + seventh-harmonic injection method. However, we confirmed that the output torque could be increased by nearly 5% compared to that under the fundamental control method. Moreover, we confirmed through FFT analysis that the ratio of fifth harmonics to be controlled was correctly injected through fifth-harmonic injection experiments under 10 and 5 Arms conditions. In addition, the increase rate of output torque was about 1.8 times higher under the rated current condition of 10 Arms in which the harmonic component was relatively small compared to that under the 5 Arms condition.
Ultimately, using the fifth-harmonic injection method presented in this paper, output torque can be proportionally improved by increasing the fundamental ratio within the same current peak via the measured current information analyzed by FFT without requiring torque modeling using the physical properties of the motor.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}