1. Introduction
Variable renewable energies from wind and sun are important to reduce the global carbon footprint of energy systems. At the same time, their variability creates novel challenges for both the design and the operation of transmission grids. Especially when large renewables capacities are localized in few regions with good natural resources, their power generation may lead to line overloads in the grid. Redispatch is a common measure to counteract these congestions, but it may be expensive. Grid capacity extensions are a last resort but typically require a long time to implement and are subject to societal resistances. Thus, utilizing active power flow control technologies in the grid is an attractive and often cost-effective option for grid operators. Flexible alternating current transmission systems (FACTSs) utilize power electronics to enhance the grid’s controllability [
1]. Examples include static var compensators (SVC), thyristor-controlled series capacitors (TCSCs), and thyristor-controlled phase-shifting transformers (PST), which are part of various grid development plans, e.g., in Germany (
www.netzentwicklungsplan.de (accessed on 2 February 2023)).
An important question that naturally arises is where to place such FACTS devices in the power grid and how to control them. Maximizing the loadability of the system for one demand scenario considering various FACTS devices can be solved by genetic algorithms [
2] or by the alternating direction method of multiplier (ADMM) [
3]. Mixed integer linear programming (MILP) can be used for PST [
4] or SVC [
5] placement in the same one-scenario setting. Several scenarios are considered in approaches based on two-stage stochastic programming [
6,
7,
8], which allows to account for the expected scenario-dependent generation costs as well. All of these approaches do not guarantee system feasibility or the (re-)dispatch costs for situations outside the (typically few) considered scenarios. In our experimental section, we show that relying only on extreme generation situations may be misleading about the grid’s feasibility for intermediate in-feeds.
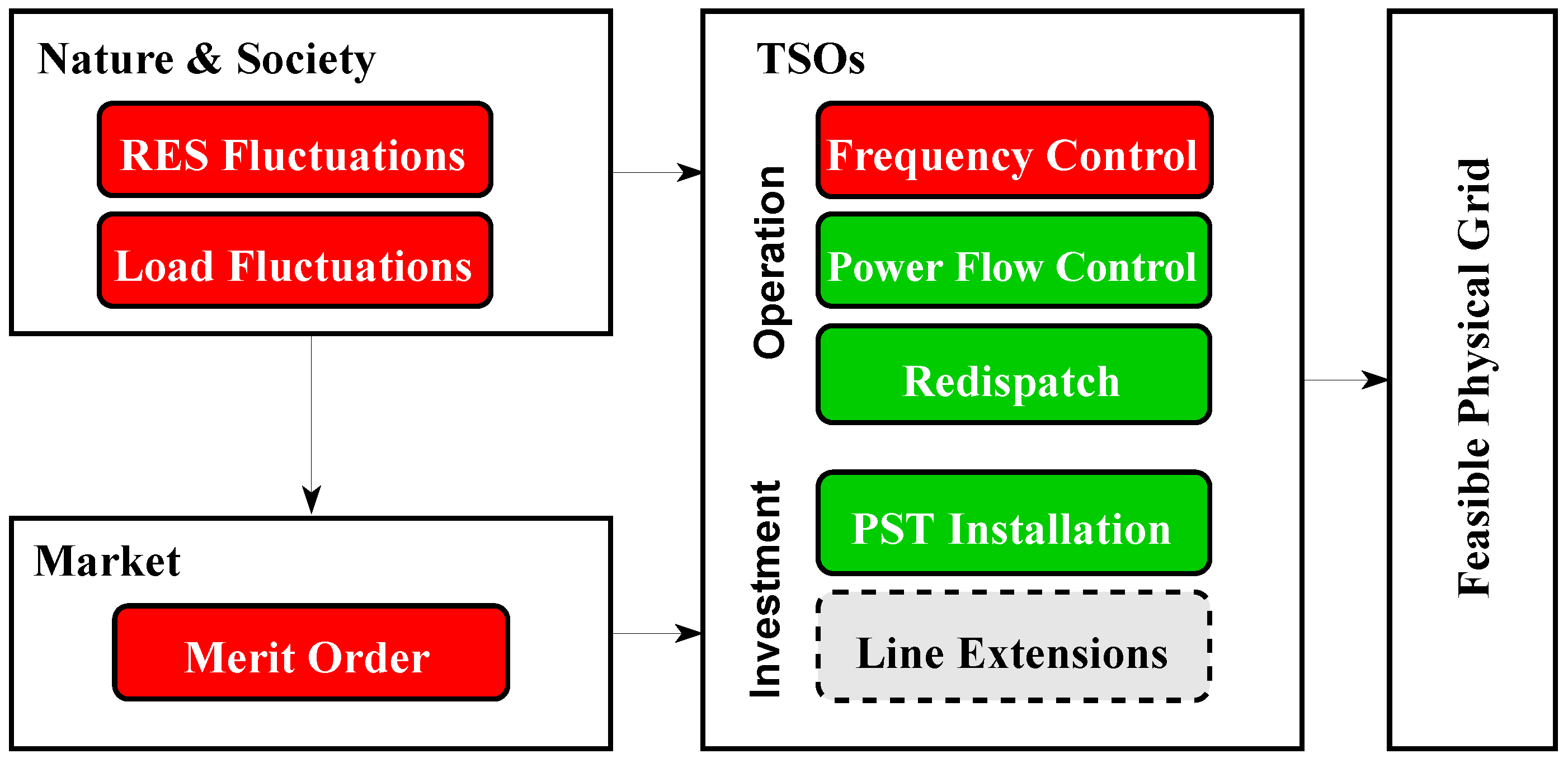
In this paper, we propose an algorithm to find the minimal number and location of PSTs that can guarantee system feasibility and limit redispatch costs for all scenarios in a continuous uncertainty set. Considered uncertainty factors are renewable, and load fluctuations as well as the corresponding dispatch decisions are determined by markets or load–frequency control, see
Figure 1. During PST placement, we take into account the grid operators’ situation-dependent control options, such as specifying PST settings and redispatch orders to the attached power plants. Our algorithm thus produces, as a byproduct of the PST placement task, control policies to dynamically determine the PST settings and the redispatch orders. These policies are assumed to be affine linear in the uncertain factors in our work. They are chosen optimally in the sense that they minimize the worst-case redispatch cost in this class of controls. Since we consider the often strongly non-linear dispatch decisions by markets and frequency control as part of the uncertainty set, the linearity assumption for small to medium-sized redispatch corrections is plausible.
In our proposed method, we model the power flow in the grid as a set of linear equations, similar to the approach used in [
9,
10]. However, we employ a robust optimization framework instead of relying on chance constraints to model the uncertainty in power injections. Doing so allows us to write the continuous part of the placement and control problem as a linear program, which is easier to solve than the second-order cone programs derived from chance-constrained optimization problems. The authors of [
11] also use a robust optimization approach in the context of reserve scheduling in power systems with highly uncertain power injections. In our work, we extend this approach by also considering the optimal location of PSTs. The resulting robust optimization problem can be solved with MILP. It is worth noting that fuzzy logic represents a widely used alternative to handle uncertainty in power systems [
12,
13,
14]. However, fuzzy methods may encounter scalability issues when dealing with the large-scale problems often encountered in power systems. Consequently, heuristics may be necessary to reduce solving times [
15].
The uncertainty set considered in the robust optimization should be large enough to cover at least a selection of plausible scenarios and all mixtures of these. At the same time, the uncertainty set should not be too large in order to avoid excessive conservatism of the solution. We use principal component analysis (PCA) [
16] based on a set of given scenarios to define the uncertainty set as a rotated hyperrectangle as in [
17]. While the solution might be conservative, it is guaranteed to yield feasible system states for this continuous set.
Due to the computational expense of exact methods to determine the optimal placement of FACTS, various studies have suggested heuristics as a solution to this problem [
18,
19,
20]. In this study, we also propose a greedy algorithm that yields near-optimal solutions while being much faster to solve than the MILP. It iteratively checks for improvement in the objective function when adding a PST to a transmission line in a hill-climbing fashion. In each iteration, the algorithm solves the linear programming relaxation of the proposed MILP and projects the fractional solution onto the feasible set of the original problem. While the maximum number of iterations grows linearly with the number of transmission lines in the grid, a parametrized stopping condition can drastically reduce the algorithm’s search space. We demonstrate that for a realistically sized transmission grid, the greedy algorithm is more than 40 times faster to compute than the MILP and finds a solution with an objective value that is 17% greater. Despite a relatively big optimality gap for a planning problem, the solution of the greedy algorithm is still useful, e.g., in preliminary grid analyses.
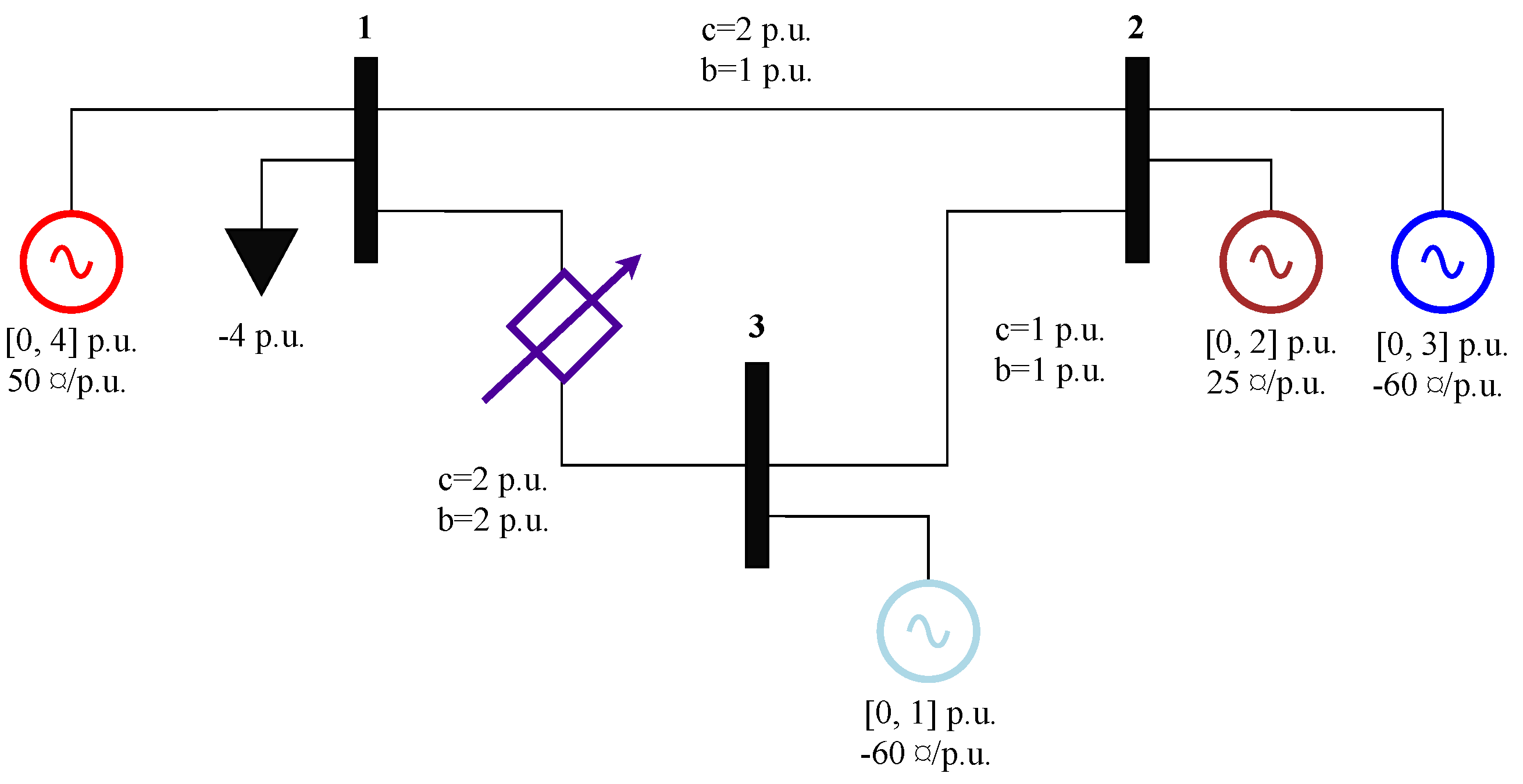
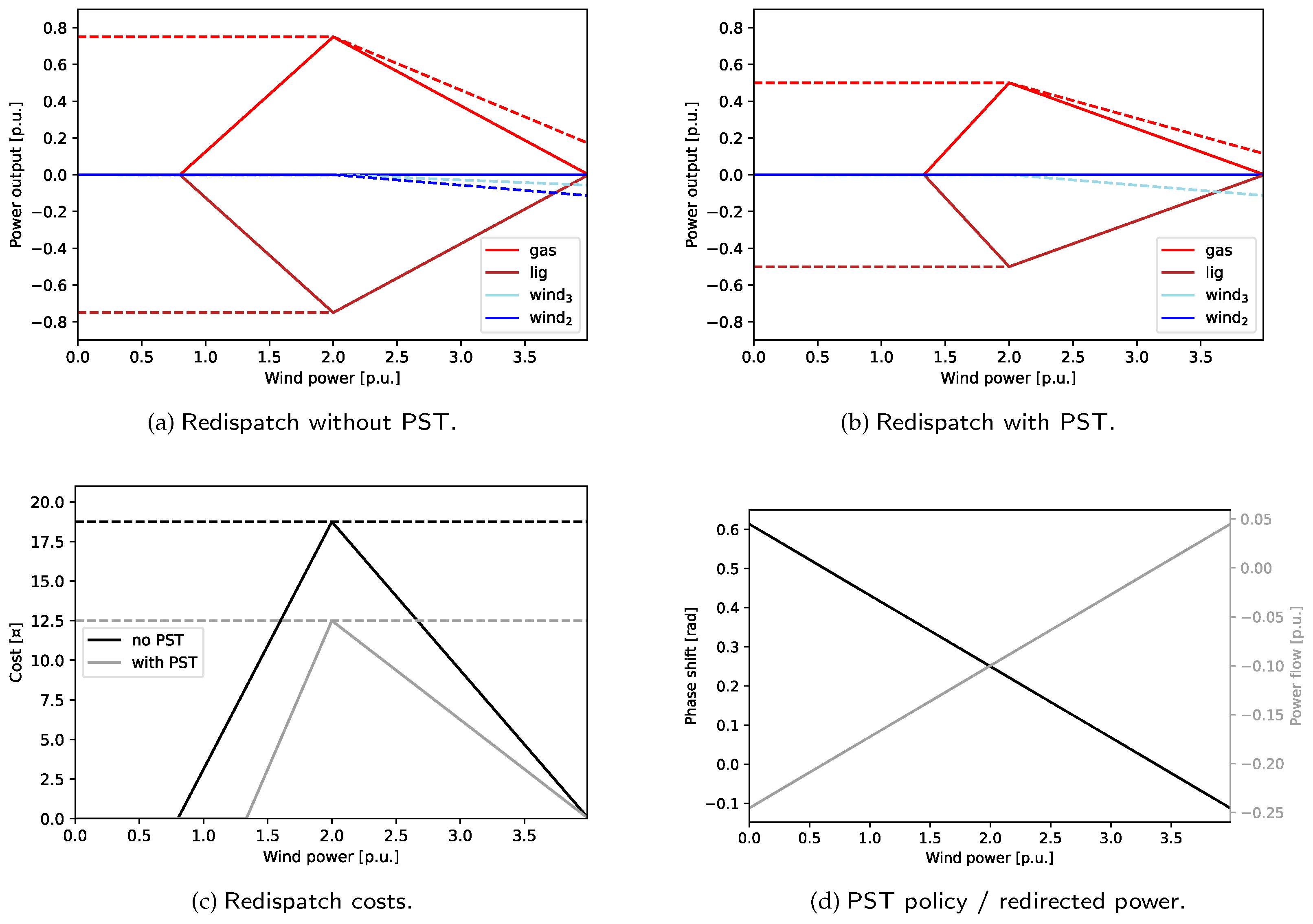
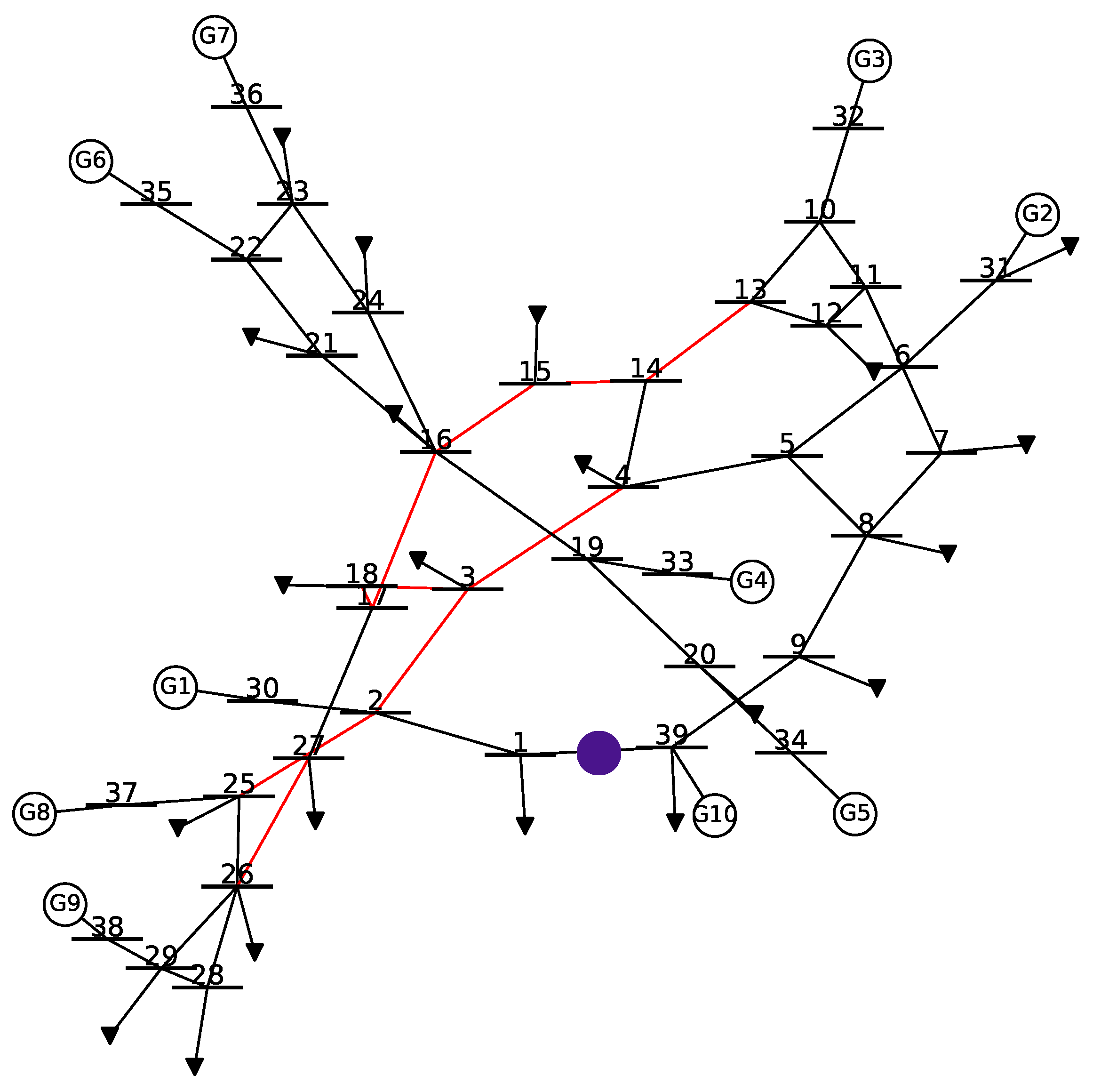
Two examples are evaluated numerically. The first example with three buses stylizes a typical grid situation in Germany, where centralized wind power leads to loop flows through neighboring countries. The computed affine linear policies are compared against optimizing the redispatch separately for each scenario. We can show that considering only extreme scenarios with no or maximal wind generation are not sufficient to guarantee grid feasibility in all situations. The second example uses the IEEE 39 bus test case and real-world time series.
The remainder of the paper is structured as follows. In
Section 2, we define the linear power flow model employed throughout this work. We give a formal problem definition in
Section 3.
Section 4 presents our proposed MILP formulation assuming that the uncertainty set is a (convex) polytope. In
Section 5, we show how to construct the polytopic uncertainty set given a collection of renewable and load scenarios and their corresponding dispatch results. The numeric evaluation is described in
Section 7. Conclusions are drawn in
Section 8.
2. Power Flow Model
We use the common DC approximation [
21] to linearly model the power flow in a transmission grid with
N buses and
L lines. Power line flows are denoted as
, voltage phase angles as
, and the phase shifts potentially added by the PSTs as
. We then have
where
is the grid’s incidence matrix and
is a diagonal matrix with the line susceptances.
Let
be the uncertain vector of power set points of the
P generators/loads of the grid, where
is the corresponding uncertainty set. Moreover, let
denote the vector of power adjustments caused by redispatch actions. The power injections at the buses of the grid
are then given by
where
is the matrix that maps generators/loads to the buses, at which they are connected to the grid. According to Kirchhoff’s first law, the nodal power injections match the sum of the power flows on the connected lines, i.e.,
. By substituting (
1) into the previous relationship and equalizing it with (
2), it is possible to express the voltage phase angles of the buses
as
Since a constant shift of the phase angles does not change the physical situation,
is not invertible, and we use the pseudo-inverse to obtain a minimum norm solution. Substituting (
3) into (
1), the power line flows
can be written as a linear function of the power set points
, the redispatch
and the phase shifts added by the PSTs
as
with
. Throughout this paper,
denotes the identity matrix with appropriate dimensions. This model allows us to express line capacity constraints as a linear function of the modeled uncertainties and the control decisions.
3. Formal Problem Statement
The optimization of the number and placement of PSTs needs to consider the control actions to be performed with them as well as the effect of redispatch measures that are important additional operational measures available to the grid operators. In this paper, we assume that the control policies for setting the phase shifts
and the power adjustments
are affine linear functions of the system state, i.e., they depend linearly on the uncertain power set points
. We, thus, can write the policies as
where
is parametrized by
and
, and
by
and
.
We now can formally define the optimization task we aim to solve in this work. We aim at determining the minimal set of PSTs and their location along with the control policies (
5) and (
6) such that the total worst-case redispatch costs and the PST installations costs are minimized while ensuring that the grid operates within its feasible region for any realization of the uncertain elements
. With
indicating the placement of a PST at a transmission line and
being the worst-case redispatch cost, the optimization problem can then be written as
Here, is a vector of ones with appropriate dimensions, and is a weighting factor between the cost for placing the PSTs in the grid and the worst-case redispatch cost. It should be chosen depending on the assumed probability of the worst-case redispatch situation. Vector denotes the maximum transport capacity of the lines, and is the PST technical constraint on the maximum allowed phase shift. Redispatch power adjustments sum to zero and should not violate the situation-dependent physical limitations , of generation or consumption for each element of . An example of such bounds is and for wind and solar power plants. We generally assume a linear relation, i.e., and , where and are diagonal matrices. Moreover, represents the cost of increasing the power output of a generator/load by one unit.
4. Robust Optimization with Polytopic Uncertainty
In this section, we formulate a MILP model to solve the optimization task defined in the last section. By assuming a polytopic uncertainty set , we are able to express the infinite number of robustness constraints as a finite set of linear constraints using duality properties.
To this end, we first use expression (
4) and the parametrizations (
5) and (
6) to rewrite the constraints of (
7) in compact matricial form, i.e.,
with
and
being defined in (
9) and (
10), respectively, where · represents zero entries:
Next, we assume that the uncertainty set
of the power set points
is a polytope defined as the intersection of
M halfspaces. That is, given the exterior representation of
with
and
, we assume that
such that
,
. In our experiments, the uncertainty set is guaranteed to be a polytope by construction as shown in
Section 5.
Using (
8) and (
11), our optimization task is equivalent to the following min-max optimization problem:
where
K is the number of rows of
,
is the set
,
is the
j-th row of
, and
is the
j-th element of
.
We transform the min-max problem (
12) into a single-stage linear program using duality theory. As
is nonempty and bounded, the inner optimization problem is always feasible, and hence its primal and dual problems have the same objective value by strong duality. We can thus rewrite (
12) as
where
are the dual variables of the
j-th inner problem. Optimization problem (
13) can then be formulated as a single-level minimization problem:
The equivalence between (
13) and (
14) can be verified by noticing that an optimal solution for (
14) is also a feasible solution for (
13) and that both objective functions have the same value. On the other hand, an optimal solution for the outer problem of (
13) implies that there exists a
that satisfies the constraints of the inner problem, and, thus, the solution would also be feasible in (
14), and both objective functions would have the same value.
5. Robust Uncertainty Set
The optimization formulated above enables us to solve the robust PST placement problem as a MILP model given a polytopic uncertainty set
. As sketched in
Figure 1, the influencing factors to be described via the uncertainty set are not only the renewable and load uncertainties but also the market and frequency control measures. These potentially large effects are determined via complex mechanisms, often showing highly non-linear behavior with respec to the loads and renewables. For example, the classic merit-order algorithm uses one power plant after the other in full, but it does not proportionally scale production levels. By including these factors in the uncertainty set, the linearity assumption for the remaining minor deviations from redispatch and active flow control can be justified.
To create realistic uncertainty sets, we propose to generate samples by creating a set of plausible renewable generation and load scenarios either from measurements or probabilistic models. For each scenario a market model, e.g., a simple merit-order dispatch, is used to compute the dispatch decisions. The full information is then used to generate a continuous uncertainty set that covers the modeled scenarios but also the space in between, i.e., all (convex) combinations of them.
Given
S scenarios of the uncertain vector of power set points
,
, a first set enclosing all these points can be defined as
where
and
are defined as
and
for all dimensions
.
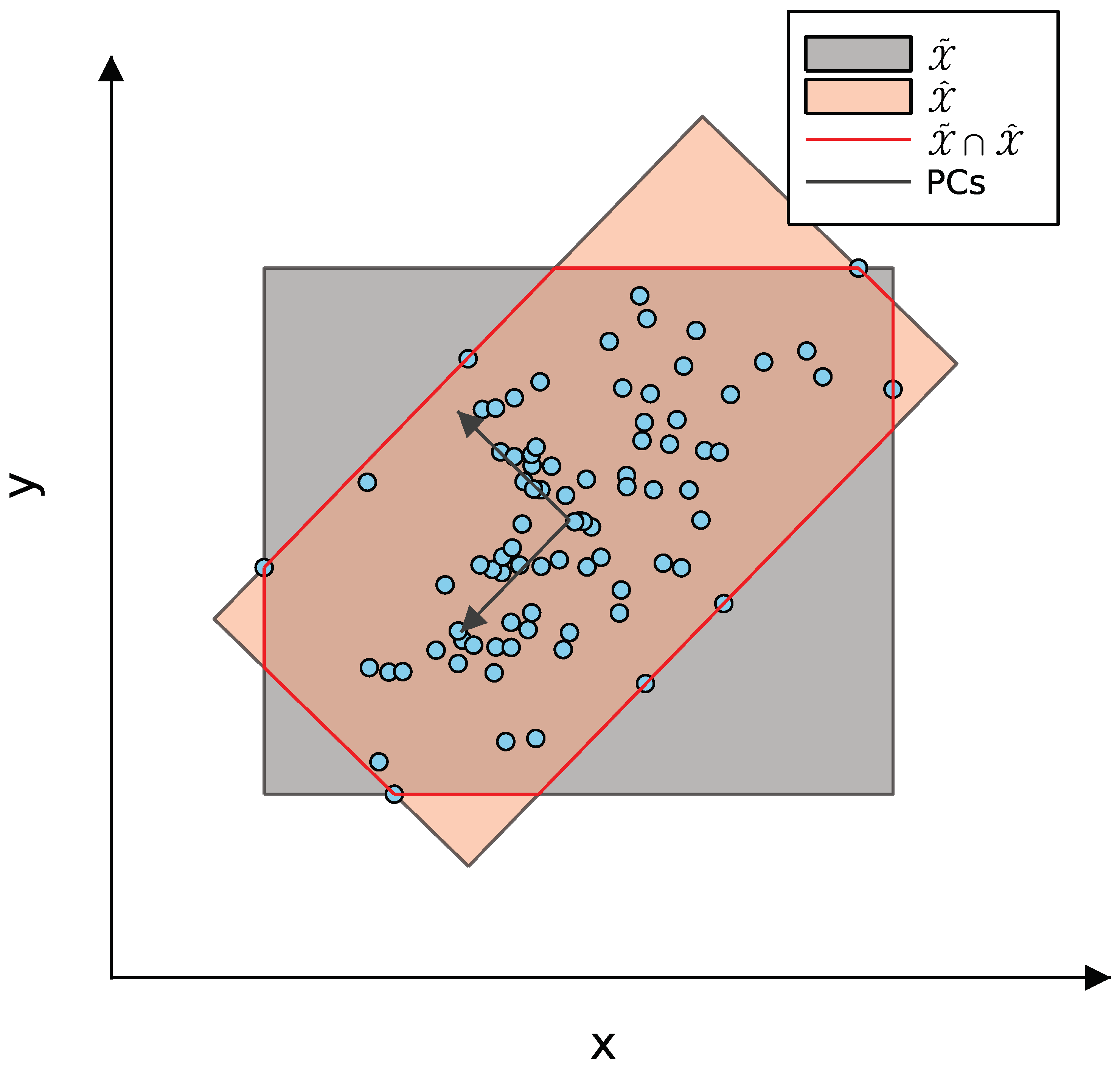
However, as shown in
Figure 2, this axis-aligned hyperrectangle can be large and lead to overly conservative solutions in case the components of
are highly correlated, which is usually the case in power systems (consider, for instance, that the wind or photovoltaic production in close by locations will typically be similar).
To leverage these correlations between the different dimensions of the scenarios, we use PCA to compute a tighter, rotated uncertainty set as in [
17].
Let
be the data matrix. We first center the data by subtracting them by their empirical mean
to obtain the matrix
. Next, we calculate the empirical covariance matrix
as
. Symmetric matrix
can be diagonalized, i.e.,
, where
has the eigenvectors of
in its columns and
is a diagonal matrix with the corresponding eigenvalues on its diagonal. This allows us to construct a rotated, data-aligned hyperrectangle
as
where
and
, with
and
being the
j-th elements of the row vectors
and
containing the maximum and minimum values among the
S scenarios in the direction of the principal components, respectively.
With this approach, we are able to fit a possibly much tighter set to the scenarios by defining the uncertainty set
as the intersection between
and
, i.e.,
which is shown in
Figure 2.
6. Greedy Algorithm for Solving Robust MILP
As the size of the grid increases, the runtime for solving (
14) to optimality becomes too long as shown in our experiments (see
Section 7). We, thus, propose a hill-climbing-like heuristic that iteratively checks whether adding a PST to a line decreases the value of the objective function. Each iteration relies on solving the linear programming relaxation of (
14) and projecting the fractional solution onto the feasibility set of the original MILP. The algorithm performs, at most,
L iterations, thus yielding polynomial time complexity. However, the solution of the proposed method is only guaranteed to be a local minimum on the solution space of the original MILP by nature of the hill-climbing procedure.
The algorithm first determines a lower bound for the objective function of (
14) by solving its linear programming relaxation, as any solution of the (mixed-)integer program is a feasible solution of its linear relaxation. If the optimal solution of the relaxed problem has all values of
as 0 or 1, it will also be the optimal solution to the MILP. To obtain an upper bound, we can solve (
14) with
fixed to the value of the solution to the relaxed problem rounded to the closest integer.
The algorithm proceeds in a hill-climbing fashion to improve the integer solution. With being the value of from the solution to the relaxed problem, the algorithm places a PST into the line corresponding to the largest element of , i.e., it fixes element of to 1. If the line already has a PST, the algorithm adds a PST to the line corresponding to the next largest element of . With one of the elements of fixed, the algorithm solves the relaxed problem and uses the rounded solution to update the upper bound of the objective function. The algorithm continues adding PSTs to the grid until the value of the objective function stops decreasing between iterations, or if the largest element of is smaller than some parameter .
The pseudocode for the proposed greedy algorithm is presented in Algorithm 1, where
⌀ is the empty set,
is the set of lines with PST,
is the round operator, and
represents the cardinality of a set. While the
Main procedure implements the hill-climbing algorithm, the
solve procedure solves the linear relaxation of the original MILP (
14) with the variables corresponding to the lines that are already equipped with PST being fixed to one.
| Algorithm 1 Greedy algorithm for solving robust MILP. |
- 1:
procedure Main() - 2:
, Solve(·, ⌀) - 3:
, Solve(, ) - 4:
- 5:
while and do - 6:
- 7:
·, Solve(, ) - 8:
, Solve(, ) - 9:
if then - 10:
return - 11:
end if - 12:
, - 13:
end while - 14:
return - 15:
end procedure - 16:
- 17:
procedure Solve(, ) - 18:
solve relaxation of MILP ( 14) with fixed to - 19:
return value of , value of - 20:
end procedure
|












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}