
Variable Amplitude Gate Voltage Synchronous Drive Technique for Improving Dynamic Current Balancing in Paralleled IGBTs

 ,
, 
Abstract
:1. Introduction
2. Modeling and Analysis of the Method of Synchronous Variable-Amplitude Drive of IGBTs in Parallel for Current Sharing Control
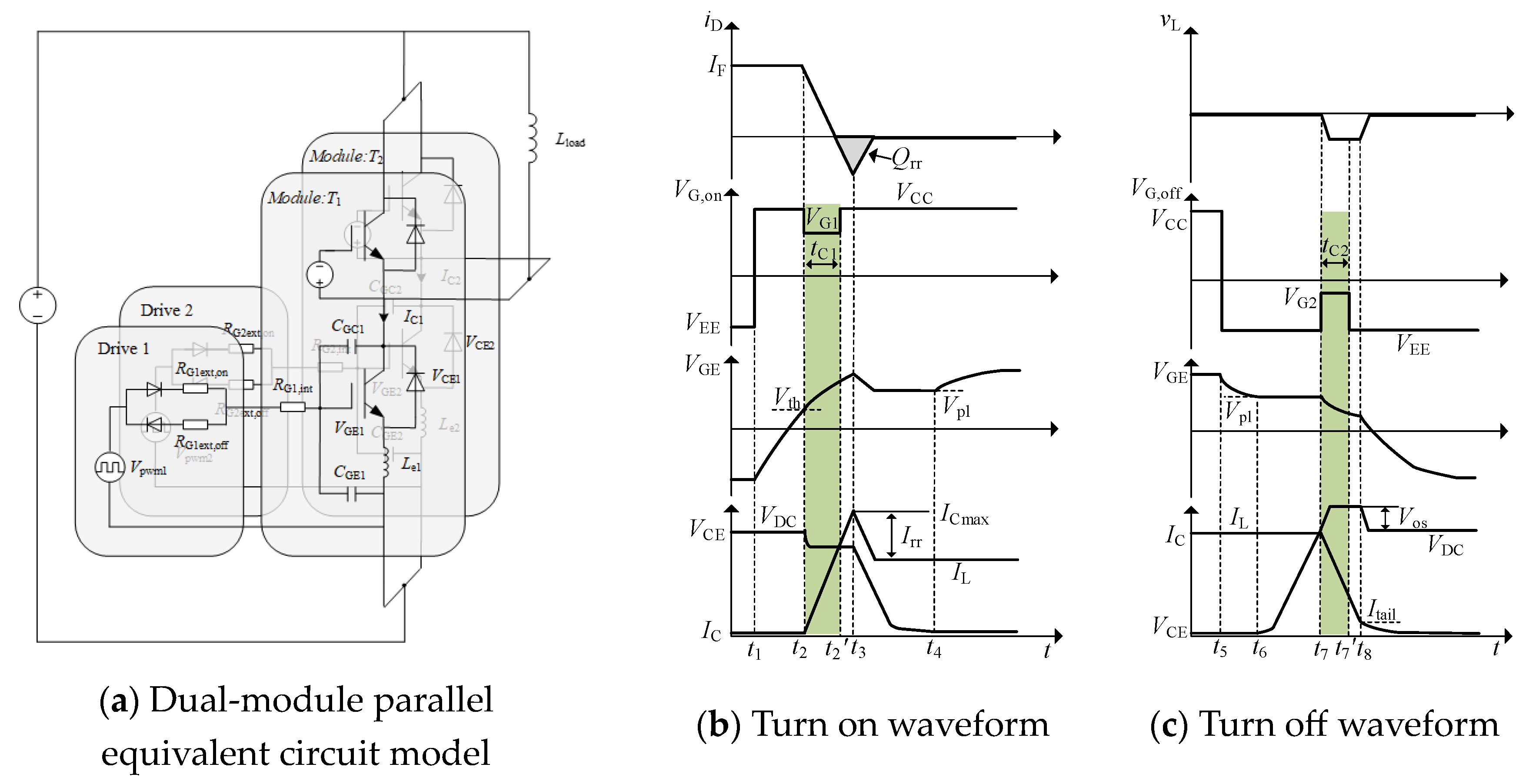
2.1. Analysis of the IGBT Operation Process with Synchronous Variable-Amplitude Driving Method
2.1.1. Turn-On Delay
2.1.2. Collector Current Rise
2.1.3. Turn-Off Delay
2.1.4. Collector Voltage Rise
2.1.5. Collector Current Drop Stage
2.2. PSpice Modeling with the IGBT Parameters
3. Identification of the Characteristic Parameters for Parallel IGBT Modules
4. Characteristic Parameter Identification and Current Sharing Experiment
4.1. Characteristic Parameter Identification
4.2. Current-Sharing Experiment
5. Conclusions
- Considering the relative difference of body parameters, the influence of each dynamic characteristic parameter on the parallel application of IGBT is analyzed, and the variation law is further analyzed through simulation. When selecting the parallel IGBT module, paying attention to the consistency of these characteristic parameters as much as possible can effectively improve the degree of parallel current sharing. The current difference and current integral value are proposed as the evaluation indexes of current sharing.
- Through the verification and identification of the characteristic parameters, the characteristic parameters of the gate drive circuit that are not easy to obtain in the datasheet are modeled and analyzed, and the method of calculating the gate characteristic parameters through the experimental data of the turn-on and turn-off process is studied. This allows for the determination of the composite parameter differences between modules can be obtained so that IGBT modules with similar parameter characteristics are selected for parallel use and provide parameter basis for synchronous variable-amplitude drive compensation.
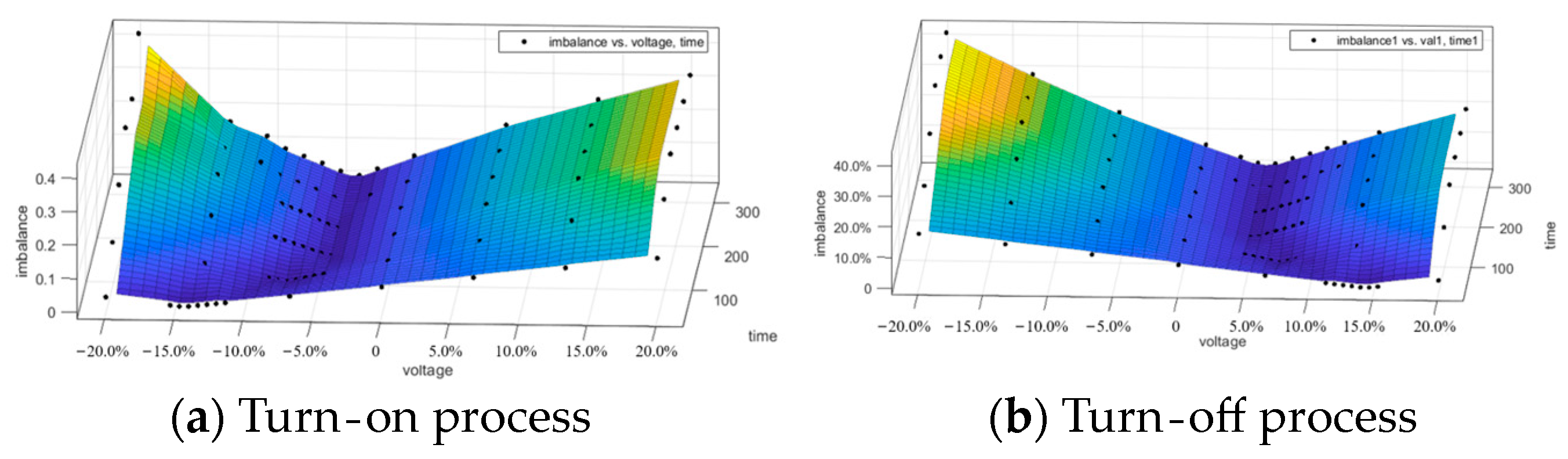
- A synchronous variable-amplitude driving method is proposed, and the working principle of this method is clarified in conjunction with the dynamic process circuit model. The effectiveness of this method is verified by simulation. And through multiple sets of simulations, the three-dimensional relationship among gate control voltage, action time, and current unbalance degree is fitted.
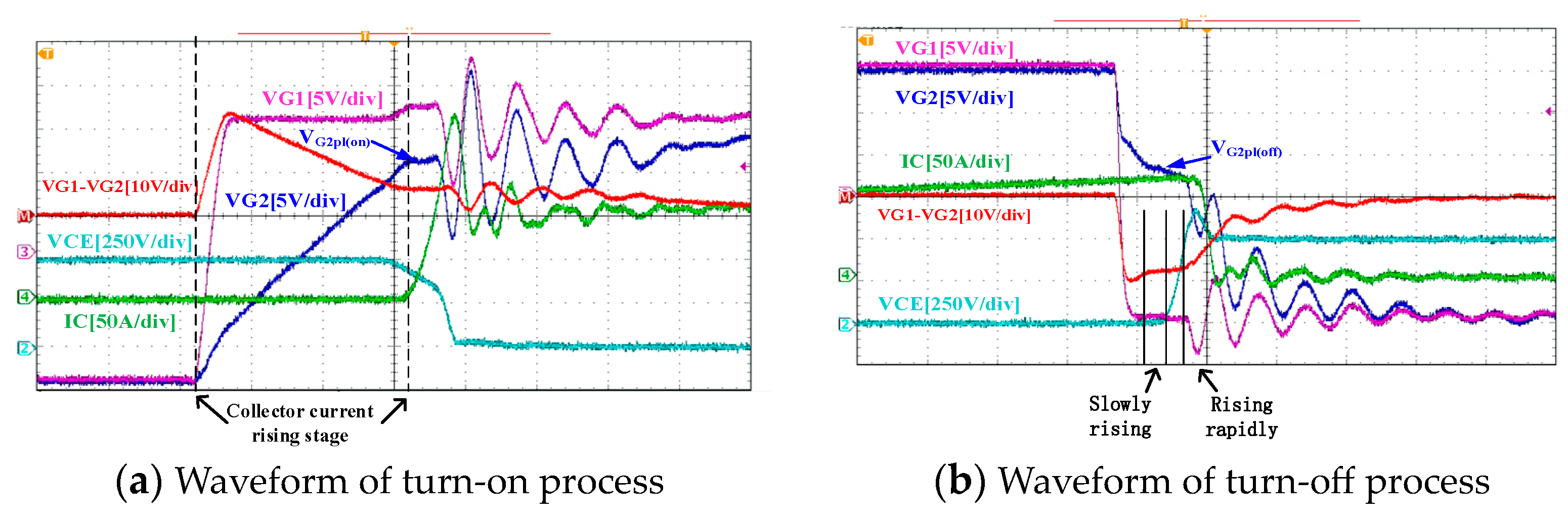
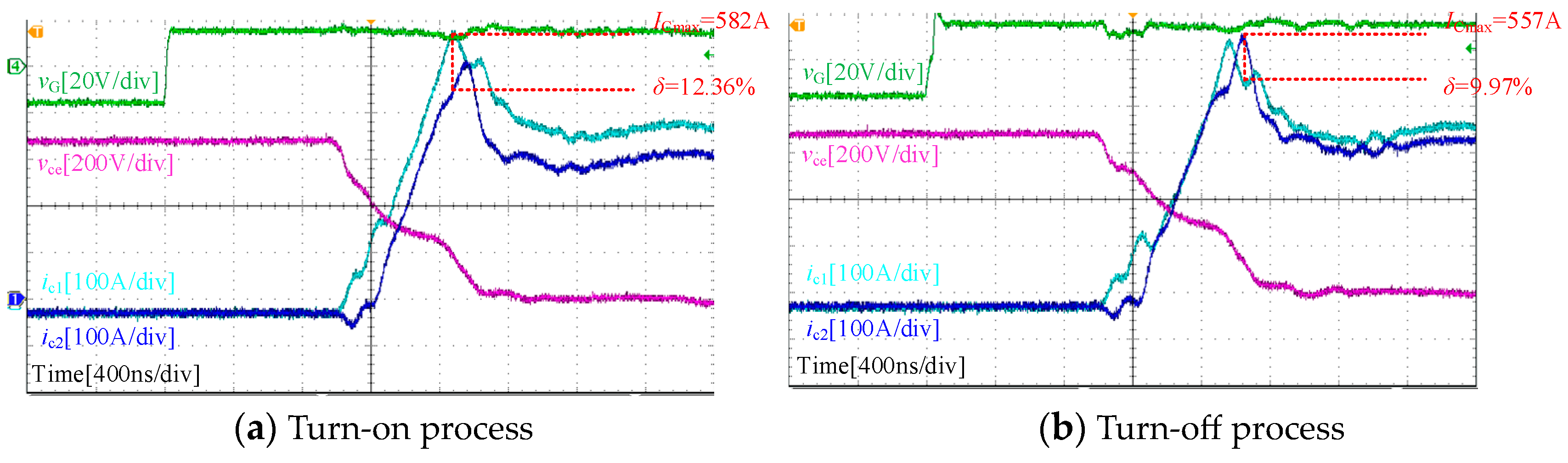
- Based on the obtained characteristic parameters of two sets of IGBT modules, synchronous and asymmetric drive compensation was performed, leading to an improvement in current equalization characteristics. This validated the effectiveness of the method. Furthermore, the impact of different gate control voltages and action times on the dynamic current equalization characteristics of parallel operation was further verified. This provides a theoretical basis for subsequent parallel experiments.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Notations
| Symbol | Description | Unit |
| VCE(sat) | the collector voltage | V |
| iC | the collector current | A |
| VGE(th) | the gate voltage | V |
| Tj | the junction temperature | °C |
| tdelay | the signal transmission delay time | ms |
| VG,on | the gate turn-on voltage | V |
| VG,off | the gate turn-off voltage | V |
| RG,on | the gate turn-on resistance | Ω |
| RG,off | the gate turn-off resistance | Ω |
| RG,int | the gate module internal resistance | Ω |
| CGC | the gate collector capacitance | nF |
| CGE | the gate emitter capacitance | nF |
| LG | the gate inductance | mH |
| LC | the collector inductance | mH |
| LE | the emission pole inductance | mH |
| RC | the collector resistance | Ω |
| RE | the emitter resistance | Ω |
| Ciesx | the input capacitor of branch x | nF |
| VGEx | the gate voltage of branch x | V |
| iCx | the collector current of branch x | A |
| RGx,on | the gate resistor of branch x | Ω |
| VCEx | the collector voltage of branch x | V |
| VGE(th)x | the turn-on threshold voltage | V |
| CGEx | the gate-emitter capacitor of branch x | nF |
| tn | the time point | ms |
| VGx,on | the turn-on drive voltage used by the drive control circuit | V |
| VGx,off | the turn-off drive voltage used by the drive control circuit | V |
| RGx,on | the sum of the external drive resistance | Ω |
| td(on)x | the turn-on delay time | ms |
| LEx | the auxiliary emitter inductance | mH |
| K | the equivalent transconductance | - |
| gfsx | the forward transfer rate | - |
| VCC | the initial gate control voltage | V |
| VG1 | the gate control voltage | Wb/m2 |
| Irr | the equivalent current overshoot | A |
| VGE(pl)x | the Miller plateau voltage | V |
| Vos | the voltage overshoot | V |
| ΔIc | the collector current difference | A |
| δ | the degree of current imbalance | - |
| RG,ext | the external resistance | Ω |
| ε | the curvature | - |
References
- Ma, L.; Zhang, D.; Yang, G.; Xie, S.; Ouyang, L.; Wei, H. Research on the IGBT Paralleling Application. High Power Convert. Technol. 2015, 2, 35–39. [Google Scholar] [CrossRef]
- Matallana, A.; Andreu, J.; Garate, J.I.; de Alegria, I.M.; Kortabarria, I. Analysis of impedance and current distributions in parallel IGBT design. In Proceedings of the 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 19–21 June 2017; pp. 616–621. [Google Scholar] [CrossRef]
- Spang, M.; Katzenberger, G. Current sharing between parallel IGBTs in power modules during short circuit with unsymmetrically connected load. In Proceedings of the 2016 18th European Conference on Power Electronics and Applications (EPE’16 ECCE Europe), Karlsruhe, Germany, 5–9 September 2016; pp. 1–9. [Google Scholar] [CrossRef]
- Zhang, G.; Liu, Z.; Wang, L.; Quan, H. Parallel Technologies of Power module for Traction Power Supply with Energy Feedback. Trans. China Electrotech. Soc. 2010, 25, 78–82. [Google Scholar]
- Liu, J.; Hao, X.; Wang, X.; Chen, Y.; Fang, W.; Niu, S. Application of thyristor controlled phase shifting transformer excitation impedance switching control to suppress short-circuit fault current level. J. Mod. Power Syst. Clean Energy 2018, 6, 821–832. [Google Scholar] [CrossRef] [Green Version]
- Wissen, M.; Domes, D.; Brekel, W.; Yilmaz, K. How asymmetric busbar design causes symmetric switching behavior of paralleled IGBT modules. In Proceedings of the CIPS 2018; 10th International Conference on Integrated Power Electronics Systems, Stuttgart, Germany, 20–22 March 2018; pp. 1–3. [Google Scholar]
- Kong, L.; Zhang, D.; Puqi, N.; Zhang, J.; Qiu, Z. The IGBT module layout design considering the electrical and thermal performance. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Martin, C.; Schanen, J.; Guichon, J.; Pasterczyk, R. Analysis of Electromagnetic Coupling and Current Distribution Inside a Power Module. IEEE Trans. Ind. Appl. 2007, 43, 893–901. [Google Scholar] [CrossRef]
- Zhang, C.; Sun, C.; Ma, W.; Ai, S. Paralleling Current Sharing Method of Parallel IGBTs Based on Circuit Topology. High Volt. Eng. 2013, 39, 505–512. [Google Scholar]
- Wang, J.M.; Yan, Q.H.; Dong, L.; Xiao, G.D.; Yan, Z.M.; Hu, J.S.; Wang, Y. Research on dynamic current sharing of parallel high-power IGBTs. Electr. Autom. 2010, 32, 10–12. [Google Scholar]
- Weigel, J.; Boehmer, J.; Wahl, E.; Nagel, A.; Krafft, E.U. Paralleling of High Power Dual Modules: Standard Building Block Design for Evaluation of Module Related Current Mismatch. In Proceedings of the 2018 20th European Conference on Power Electronics and Applications (EPE’18 ECCE Europe), Riga, Latvia, 17–21 September 2018; pp. P.1–P.10. [Google Scholar]
- Wissen, M.; Domes, D.; Brekel, W.; Holtij, T.; Groove, A. Effects of Influencing the Individual Leg Inductance in Case of Paralleling Modules on Basis of XHP 3 and EconoDUAL. In Proceedings of the PCIM Europe 2017; International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 5–7 June 2017; pp. 1–6. [Google Scholar]
- Alvarez, R.; Bernet, S. A new delay time compensation principle for parallel connected IGBTs. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011; pp. 3000–3007. [Google Scholar] [CrossRef]
- Matallana, A.; Andreu, J.; Garate, J.I.; Aretxabaleta, I.; Planas, E. Analysis and modelling of IGBTs parallelization fundamentals. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 3247–3252. [Google Scholar] [CrossRef]
- Tang, Y.; Ma, H. Dynamic Electrothermal Model of Paralleled IGBT Modules with Unbalanced Stray Parameters. IEEE Trans. Power Electron. 2017, 32, 1385–1399. [Google Scholar] [CrossRef]
- Huang, X.; Mu, F.; Liu, Y.; Wu, Y.; Sun, H. Asynchronous Gate Signal Driving Method for Reducing Current Imbalance of Paralleled IGBT Modules Caused by Driving Circuit Parameter Difference. IEEE Access 2021, 9, 86523–86534. [Google Scholar] [CrossRef]
- Schlapbach, U. Dynamic paralleling problems in IGBT module construction and application. In Proceedings of the 2010 6th International Conference on Integrated Power Electronics Systems, Nuremberg, Germany, 16–18 March 2010; pp. 1–7. [Google Scholar]
- Jadhav, V.; Zhou, Y.; Jansen, U. Analysis of Different IGBT Gate Driver Strategies Influencing Dynamic Paralleling Performance. In Proceedings of the PCIM Asia 2016; International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Shanghai, China, 28–30 June 2016; pp. 1–9. [Google Scholar]
- Peng, C.; Li, X.; Fan, J.; Zhao, Z.; Tang, X.; Cui, X. Experimental investigations on current sharing characteristics of parallel chips inside press-pack IGBT devices. IEEE Trans. Power Electron. 2022, 37, 10672–10680. [Google Scholar] [CrossRef]
- Li, Z.F.; Nishida, N.; Aoki, H.; Shibata, H.; Liao, C.C.; Huang, M.S. Simulation-Assisted Design of a Power Stack for Improving Static Current Sharing Among Three IGBT Modules Connected in Parallel. IEEE Access 2022, 10, 10079–10093. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, J.; Liu, F.; Liu, Q.; Zou, R. An RLL current sharing snubber for multiple parallel IGBTs in high power applications. IEEE Trans. Power Electron. 2022, 37, 7555–7560. [Google Scholar] [CrossRef]
- Zeng, X.; Li, Z.; Wan, J.; Zhang, J.; Ren, M.; Gao, W.; Li, Z.; Zhang, B. Embedded hardware artificial neural network control for global and real-time imbalance current suppression of parallel connected IGBTs. IEEE Trans. Ind. Electron. 2019, 67, 2186–2196. [Google Scholar] [CrossRef]
- Lu, J.; Shen, L.; Huang, Q.; Sun, D.; Li, B.; Tan, Y. Investigation of a rectangular heat pipe radiator with parallel heat flow structure for cooling high-power IGBT modules. Int. J. Therm. Sci. 2019, 135, 83–93. [Google Scholar] [CrossRef]
- Yuan, W.; He, Y.; Li, Z.; Ruan, Y.; Lu, L.; Li, B. A real-time aging monitoring method of parallel-connected IGBT modules. Mater. Sci. Semicond. Process. 2021, 124, 105555. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Parameter Values | |
|---|---|---|
| Test Conditions | VDC = 900 V, IL = 250 A | |
| IGBT Modules | 1700 V−1 | 1700 V−2 |
| RG,int | 2.41 Ω | 2.33 Ω |
| RG,on | 4.41 Ω | 4.65 Ω |
| RG,off | 4.39 Ω | 4.35 Ω |
| CGE | 28.98 nF | 29.92 nF |
| CGC1 | 9.17 nF | 9.29 nF |
| CGC2 | 0.62 nF | 0.64 nF |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Lei, E.; Jin, L.; Ma, K.; Li, Y.; Li, X.; Xia, C.; Wang, X. Variable Amplitude Gate Voltage Synchronous Drive Technique for Improving Dynamic Current Balancing in Paralleled IGBTs. Energies 2023, 16, 5306. https://doi.org/10.3390/en16145306
Zhang J, Lei E, Jin L, Ma K, Li Y, Li X, Xia C, Wang X. Variable Amplitude Gate Voltage Synchronous Drive Technique for Improving Dynamic Current Balancing in Paralleled IGBTs. Energies. 2023; 16(14):5306. https://doi.org/10.3390/en16145306
Chicago/Turabian StyleZhang, Junkun, Ertao Lei, Li Jin, Kai Ma, Ying Li, Xinwei Li, Chenyang Xia, and Xirui Wang. 2023. "Variable Amplitude Gate Voltage Synchronous Drive Technique for Improving Dynamic Current Balancing in Paralleled IGBTs" Energies 16, no. 14: 5306. https://doi.org/10.3390/en16145306
APA StyleZhang, J., Lei, E., Jin, L., Ma, K., Li, Y., Li, X., Xia, C., & Wang, X. (2023). Variable Amplitude Gate Voltage Synchronous Drive Technique for Improving Dynamic Current Balancing in Paralleled IGBTs. Energies, 16(14), 5306. https://doi.org/10.3390/en16145306