
An Active Power Dynamic Oscillation Damping Method for the Grid-Forming Virtual Synchronous Generator Based on Energy Reshaping Mechanism


Abstract
:1. Introduction
- (1)
- Both the closed-loop small signal model and the dynamic equivalent circuit model of GFVSG are established successively. Therefore, it reflects that the active power command step and the power grid frequency disturbance are regarded as excitation sources to inject dynamic oscillation energy into the GFVSG from the perspective of circuit energy flow.
- (2)
- Compared with GFVSG, ERM-GFVSG increases the total amount of the consumed energy and the consumption speed of the dynamic oscillation energy on the premise of keeping the total dynamic oscillation energy and the total stored energy unchanged. Accordingly, it is equivalent to increasing the system damping, so as to enhance the ability of suppressing the active power dynamic oscillation.
- (3)
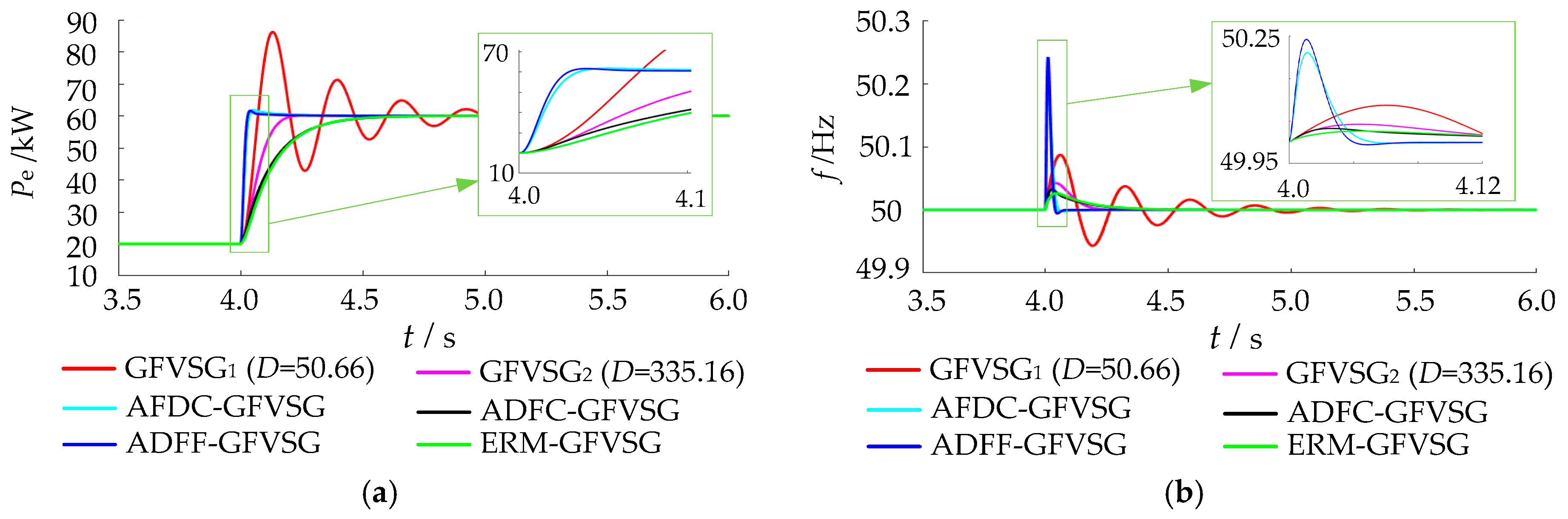
- The proposed active power dynamic oscillation damping method only works in the dynamic response process, so it does not affect the active power steady-state deviation. Practically, compared with the existing methods, ERM-GFVSG has the smallest frequency overshoot under the active power command step and the shortest active power regulation time under the power grid frequency disturbance.
2. Control Model and Active Power Dynamic Oscillation Mechanism of GFVSG
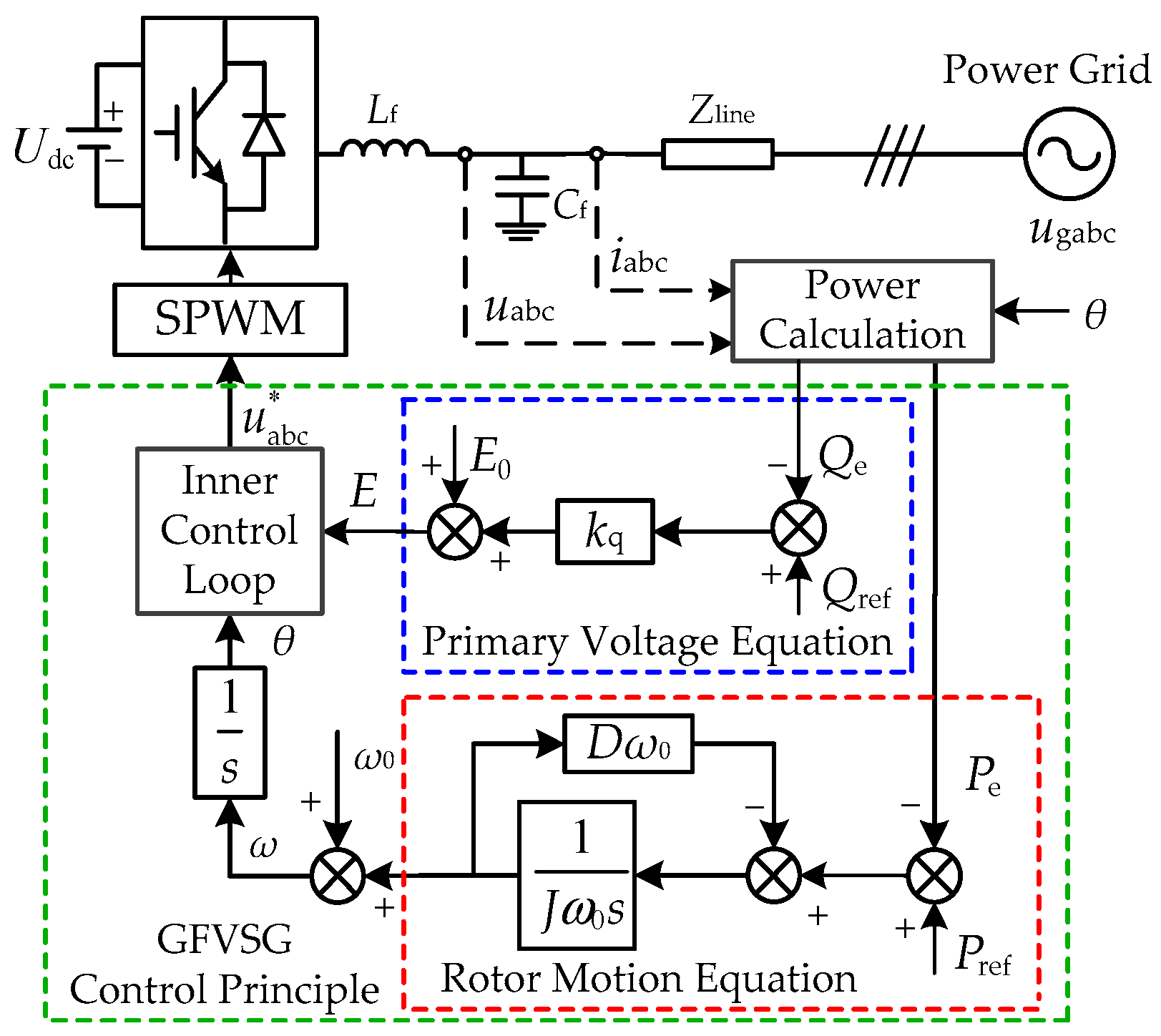
2.1. Overview of GFVSG Grid-Connected System
2.2. Small Signal Model of GFVSG and Its Active Power Dynamic Oscillation Analysis
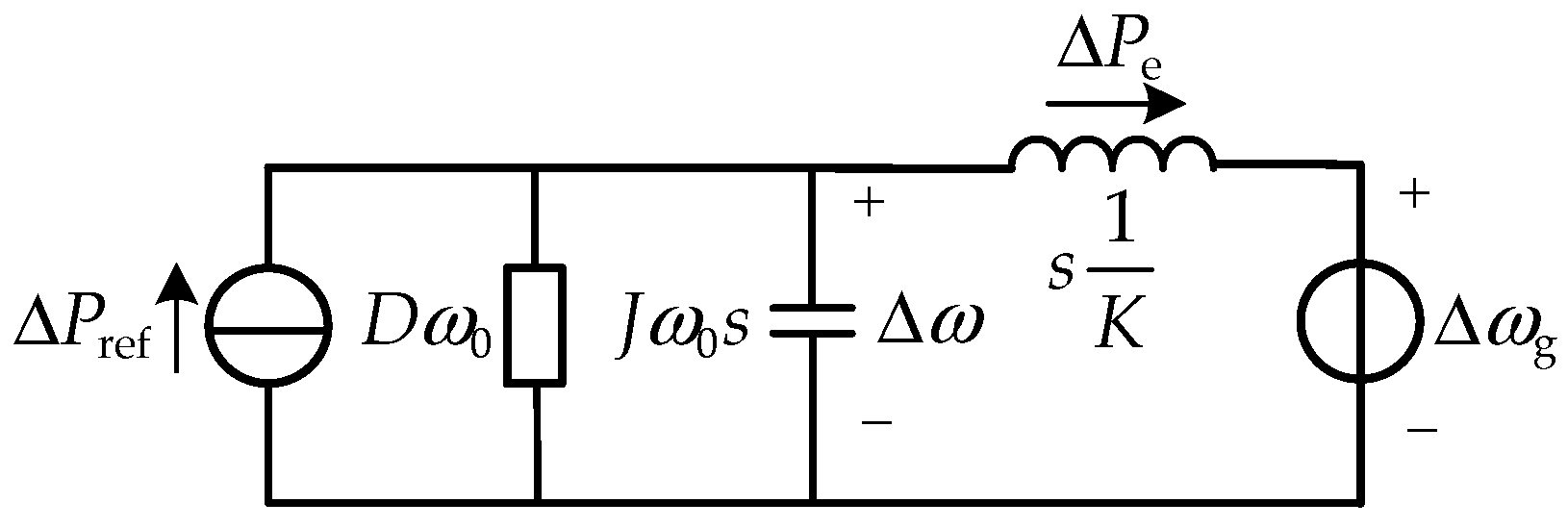
2.3. Equivalent Circuit Model of GFVSG and Its Active Power Dynamic Oscillation Analysis
3. The Proposed ERM-GFVSG Control Method
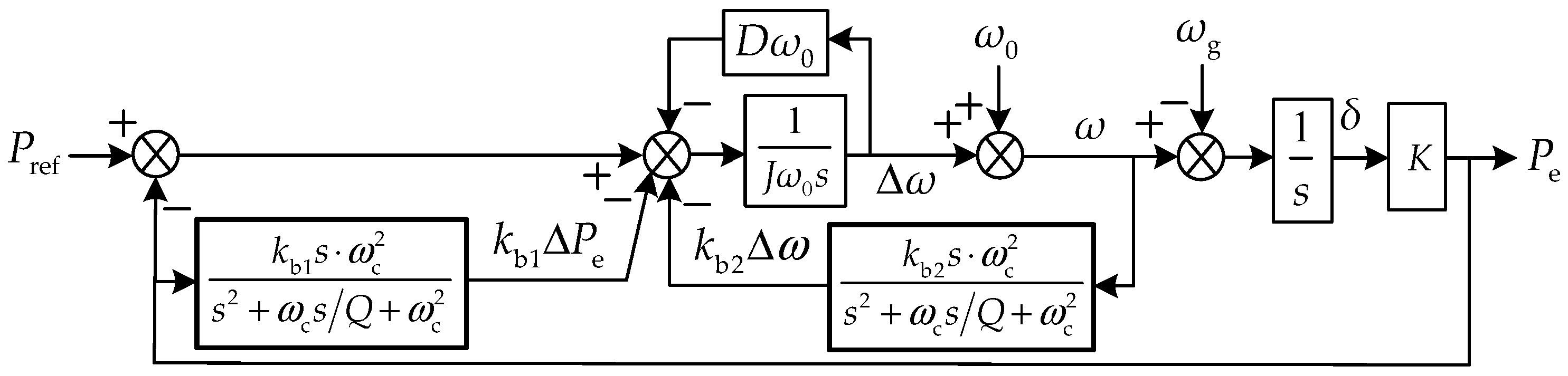
3.1. Control Principle of ERM-GFVSG
3.2. Parameter Design Method of ERM-GFVSG
4. Simulation Comparison Results
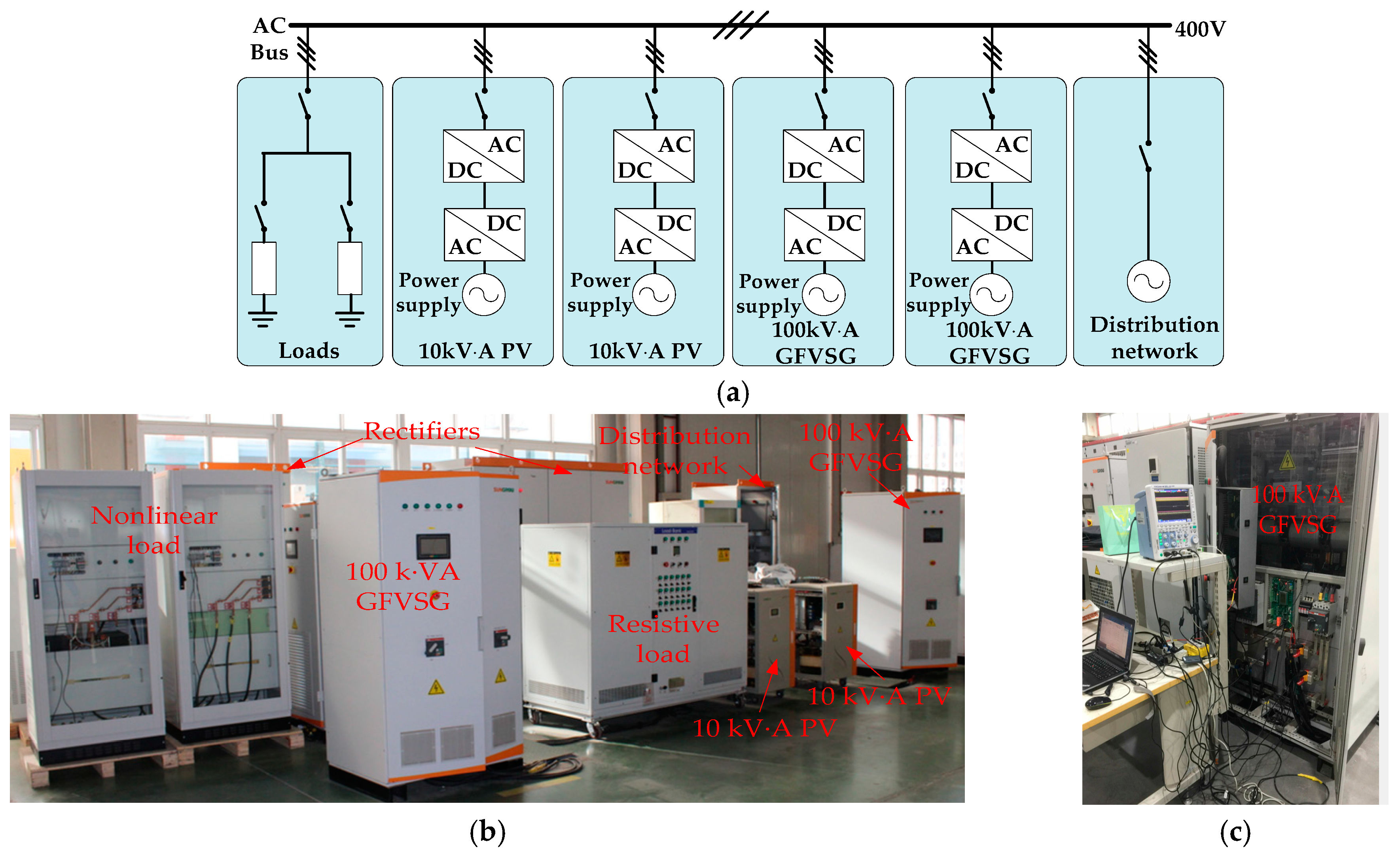
5. Experimental Comparison Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Pref, Qref, | Command of active power, reactive power, and output voltage |
| Pe, Qe | Grid-connected active power and grid-connected reactive power |
| J, D | Virtual inertia and virtual damping |
| Udc | DC source |
| Lf, Cf | AC filter inductor and AC filter capacitor |
| uabc, iabc, ugabc | Output voltage, output current, and power grid voltage |
| ω0, ω | Rated angular frequency and output angular frequency |
| XL, RL | Line reactance and line resistance |
| δ | Power factor angle |
| kq | Primary voltage modulation coefficient |
| E0, E | Rated voltage amplitude and output voltage amplitude |
| Ug, ωg | Grid voltage amplitude and gird angular frequency |
| ωn_G, ωn_E | Natural oscillation angular frequency |
| ξG, ξE | Damping ratio |
| kb1 | Active power feedback parameter |
| kb2 | Angular frequency feedback parameter |
| Q | Quality factor of the second-order LPF |
| ωc, ωc_E | Cut-off angular frequency |
| τ | Filtering time constant of the first-order LPF |
| γE | Phase angle margin |
| f, fg | Output frequency and power grid frequency |
Abbreviations
| GFVSG | Grid-forming virtual synchronous generator |
| PECs | Power electronic converters |
| TSGs | Traditional synchronous generators |
| LPF | Low-pass filter |
| PLL | Phase locked loop |
| ERM | Energy reshaping mechanism |
| ERM-GFVSG | GFVSG with the active power dynamic oscillation damping method based on ERM |
| CCVS | Current controlled voltage source |
| VCCS | Voltage controlled current source |
| AFDC | Active-power fractional differential correction |
| ADFC | Active-power differential feedback compensation |
| ADFF | Active-power differential feedforward compensation |
| AFDC-GFVSG | GFVSG with AFDC control algorithm |
| ADFC-GFVSG | GFVSG with ADFC control algorithm |
| ADFF-GFVSG | GFVSG with ADFF control algorithm |
References
- Xu, H.Z.; Yu, C.Z.; Liu, C.; Wang, Q.L.; Zhang, X. An Improved Virtual Inertia Algorithm of Virtual Synchronous Generator. J. Mod. Power Syst. Clean Energy 2020, 8, 377–386. [Google Scholar] [CrossRef]
- Li, C.; Yang, Y.; Mijatovic, N.; Dragicevic, T. Frequency Stability Assessment of Grid-Forming VSG in Framework of MPME With Feedforward Decoupling Control Strategy. IEEE Trans. Ind. Electron. 2022, 69, 6903–6913. [Google Scholar] [CrossRef]
- Shi, R.L.; Yang, G.H.; Wang, G.B.; Lan, C.H.; Huang, J.; Wang, B. Grid-Connected Active Power Response Strategy of Energy Storage VSG Based on Active-power Fractional Differential Correction. Electr. Power Automation Equip. 2023, 1–9. [Google Scholar] [CrossRef]
- Chen, S.M.; Sun, Y.; Han, H.; Fu, S.Q.; Luo, S.H.; Shi, G.Z. A modified VSG control scheme with virtual resistance to enhance both small-signal stability and transient synchronization stability. IEEE Trans. Power Electron. 2023, 38, 6005–6014. [Google Scholar] [CrossRef]
- Chen, M.; Zhou, D.; Blaabjerg, F. Enhanced Transient Angle Stability Control of Grid-Forming Converter Based on Virtual Synchronous Generator. IEEE Trans. Ind. Electron. 2022, 69, 9133–9144. [Google Scholar] [CrossRef]
- Yang, M.; Wang, Y.; Xiao, X.; Li, Y. A Robust Damping Control for Virtual Synchronous Generators Based on Energy Reshaping. IEEE Trans. Energy Convers. 2023, 38, 2146–2159. [Google Scholar] [CrossRef]
- Alipoor, J.; Miura, Y.; Ise, T. Power System Stabilization Using Virtual Synchronous Generator with Alternating Moment of Inertia. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 451–458. [Google Scholar] [CrossRef]
- Thomas, V.; Kumaravel, S.; Ashok, S. Fuzzy Controller-Based Self-Adaptive Virtual Synchronous Machine for Microgrid Application. IEEE Trans. Energy Convers. 2021, 36, 2427–2437. [Google Scholar] [CrossRef]
- Ren, M.W.; Li, T.; Shi, K.; Xu, P.F.; Sun, Y.X. Coordinated Control Strategy of Virtual Synchronous Generator Based on Adaptive Moment of Inertia and Virtual Impedance. IEEE J. Emerg. Sel. Top. Cir. Syst. 2021, 11, 99–110. [Google Scholar] [CrossRef]
- Wang, Z.H.; Zhang, Y.; Cheng, L.; Li, G.Q. Improved Virtual Synchronization Control Strategy with Multi-Parameter Adaptive Collaboration. Power Syst. Technol. 2023, 47, 2403–2414. [Google Scholar]
- Huang, L.B.; Xin, H.H.; Yuan, H.; Wang, G.Z.; Ju, P. Damping Effect of Virtual Synchronous Machines Provided by a Dynamical Virtual Impedance. IEEE Trans. Energy Conver. 2021, 36, 570–573. [Google Scholar] [CrossRef]
- Zhang, Y.N.; Xie, Y.H.; Zhang, L.; Li, M.L. Transient Control Strategy of Virtual Synchronous Generator with Adaptive Regulation of Active Power Deviation. Electr. Mach. Control 2023. Available online: http://kns.cnki.net/kcms/detail/23.1408.TM.20230823.1802.002.html (accessed on 24 August 2023).
- Mo, O.; Arco, S.D.; Suul, J.A. Evaluation of Virtual Synchronous Machines with Dynamic or Quasi-Stationary Machine Models. IEEE Trans. Ind. Electron. 2017, 64, 5952–5962. [Google Scholar] [CrossRef]
- Fang, J.; Lin, P.; Li, H.; Yang, Y.; Tang, Y. An Improved Virtual Inertia Control for Three-Phase Voltage Source Converters Connected to a Weak Grid. IEEE Trans. Power Electron. 2019, 34, 8660–8670. [Google Scholar] [CrossRef]
- Dong, D.; Wen, B.; Boroyevich, D.; Mattavelli, P.; Xue, Y. Analysis of Phase-Locked Loop Low-Frequency Stability in Three-Phase Grid-Connected Power Converters Considering Impedance Interactions. IEEE Trans. Ind. Electron. 2015, 62, 310–321. [Google Scholar] [CrossRef]
- Huang, L.; Xin, H.; Wang, Z. Damping Low-Frequency Oscillations Through VSC-HVdc Stations Operated as Virtual Synchronous Machines. IEEE Trans. Power Electron. 2019, 34, 5803–5818. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Bevrani, H.; Ise, T. A Unified Modeling Method of Virtual Synchronous Generator for Multi-Operation-Mode Analyses. IEEE J. Emerg. Sel. Top. Power Electron 2021, 9, 2394–2409. [Google Scholar] [CrossRef]
- Chen, M.; Zhou, D.; Blaabjerg, F. Active Power Oscillation Damping Based on Acceleration Control in Paralleled Virtual Synchronous Generators System. IEEE Trans. Power Electron. 2021, 36, 9501–9510. [Google Scholar] [CrossRef]
- Xiong, X.; Wu, C.; Cheng, P.; Blaabjerg, F. An Optimal Damping Design of Virtual Synchronous Generators for Transient Stability Enhancement. IEEE Trans. Power Electron. 2021, 36, 11026–11030. [Google Scholar] [CrossRef]
- Sun, P.; Yao, J.; Zhao, Y.; Fang, X.; Cao, J. Stability Assessment and Damping Optimization Control of Multiple Grid-connected Virtual Synchronous Generators. IEEE Trans. Energy Convers. 2021, 36, 3555–3567. [Google Scholar] [CrossRef]
- Baruwa, M.; Fazeli, M. Impact of Virtual Synchronous Machines on Low-Frequency Oscillations in Power Systems. IEEE Trans. Power Syst. 2021, 36, 1934–1946. [Google Scholar] [CrossRef]
- Yu, Y.; Chaudhary, S.K.; Tinajero, G.D.A.; Xu, L.; Abu Bakar, N.N.B.; Vasquez, J.C.; Guerrero, J.M. A Reference- Feedforward-Based Damping Method for Virtual Synchronous Generator Control. IEEE Trans. Power Electron. 2022, 37, 7566–7571. [Google Scholar] [CrossRef]
- Lan, Z.; Long, Y.; Zeng, J.H.; Tu, C.M.; Xiao, F. Transient Power Oscillation Suppression Strategy of Virtual Synchronous Generator Considering Overshoot. Autom. Electr. Power Syst. 2022, 46, 131–141. [Google Scholar]
- Li, M.X.; Yu, P.; Hu, W.H.; Wang, Y.; Shu, S.R.; Zhang, Z.Y.; Blaabjerg, F. Phase Feedforward Damping Control Method for Virtual Synchronous Generators. IEEE Trans. Power Electron. 2022, 37, 9790–9806. [Google Scholar] [CrossRef]
- Shi, R.L.; Zhang, Q.Y.; Wang, G.B.; Lan, C.H.; Huang, J.; Wang, B. Transient Damping Strategies to Improve Grid-Connected Active Response Performance of Energy Storage VSG. Electr. Power Autom. Equip. 2023, 1–11. [Google Scholar] [CrossRef]
- Semlyen, A. Analysis of Disturbance Propagation in Power Systems Based on a Homogeneoue Dynamic Model. IEEE Trans. Power Appar. Syst. 1974, PAS-93, 676–684. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types | Variables | ||||
|---|---|---|---|---|---|
| Electromechanical | 1/K | Jω0 | ω | Pe | δ |
| Electromagnetic | L | C | u | i | Ψ |
| Symbol | Parameter | Value |
|---|---|---|
| E0 | Rated voltage amplitude | 311 V |
| Udc | DC bus voltage | 700 V |
| ω0 | Rated angular frequency | 314.15 rad/s |
| J | Virtual inertia | 8 kg·m2 |
| kq | Primary voltage regulation coefficient | 1.4 × 10−4 V/var |
| D | Virtual damping | 50.66 J/rad |
| Lf | Filter inductance | 50.6 mH |
| Cf | Filter capacitor | 270 uF |
| fs | Sampling frequency | 5 kHz |
| XL | Line reactance | 0.15 Ω |
| Method | Symbol | Parameter | Value |
|---|---|---|---|
| AFDC-GFVSG | μ | Fractional differential order | 0.8 |
| ADFC-GFVSG | KB | Differential feedback parameter | 0.08 |
| ξB | Damping ratio | 1.02 | |
| ADFF-GFVSG | KF | Differential feedforward parameter | 0.08 |
| ξF | Damping ratio | 1.02 | |
| GFVSG1 | D | Virtual damping | 50.66 J/rad |
| ξG | Damping ratio | 0.16 | |
| GFVSG2 | D | Virtual damping | 335.16 J/rad |
| ξG | Damping ratio | 1.07 | |
| ERM-GFVSG | kb1 | Active power feedback parameter | 0.12 |
| Kb2 | Angular frequency feedback parameter | 200 | |
| ξE | Damping ratio | 1.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, R.; Lan, C.; Dong, Z.; Yang, G. An Active Power Dynamic Oscillation Damping Method for the Grid-Forming Virtual Synchronous Generator Based on Energy Reshaping Mechanism. Energies 2023, 16, 7723. https://doi.org/10.3390/en16237723
Shi R, Lan C, Dong Z, Yang G. An Active Power Dynamic Oscillation Damping Method for the Grid-Forming Virtual Synchronous Generator Based on Energy Reshaping Mechanism. Energies. 2023; 16(23):7723. https://doi.org/10.3390/en16237723
Chicago/Turabian StyleShi, Rongliang, Caihua Lan, Zheng Dong, and Guihua Yang. 2023. "An Active Power Dynamic Oscillation Damping Method for the Grid-Forming Virtual Synchronous Generator Based on Energy Reshaping Mechanism" Energies 16, no. 23: 7723. https://doi.org/10.3390/en16237723
APA StyleShi, R., Lan, C., Dong, Z., & Yang, G. (2023). An Active Power Dynamic Oscillation Damping Method for the Grid-Forming Virtual Synchronous Generator Based on Energy Reshaping Mechanism. Energies, 16(23), 7723. https://doi.org/10.3390/en16237723