
Stability Impacts of an Alternate Voltage Controller (AVC) on Wind Turbines with Different Grid Strengths



Abstract
:1. Introduction
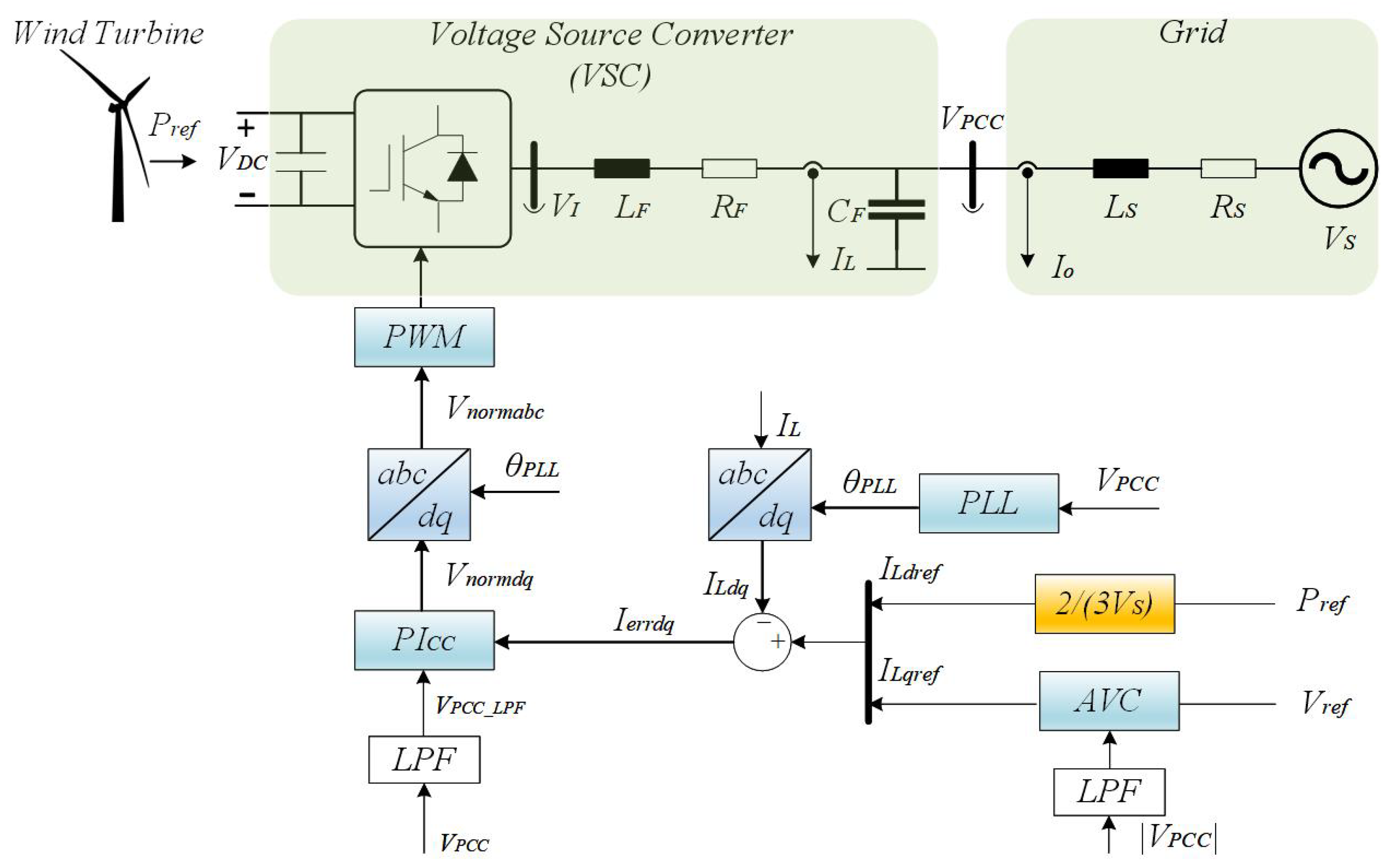
2. State-Space Model Description
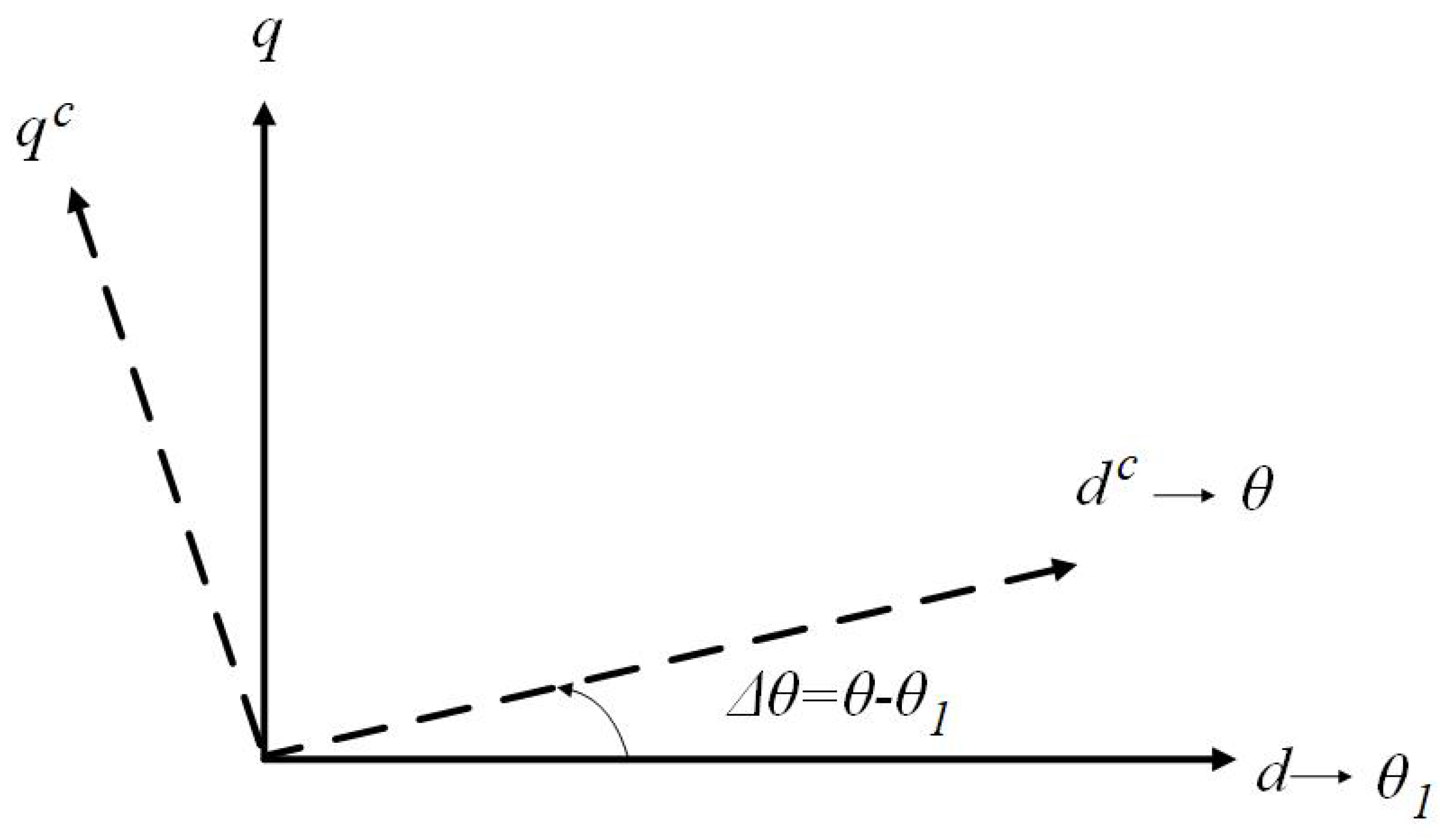
2.1. dq Transformations
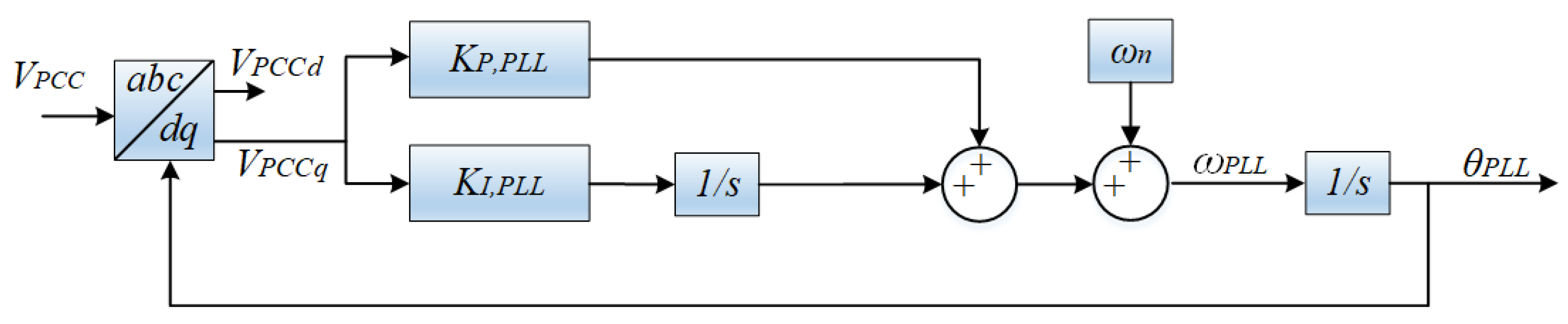
2.2. Phase-Locked Loop (PLL)
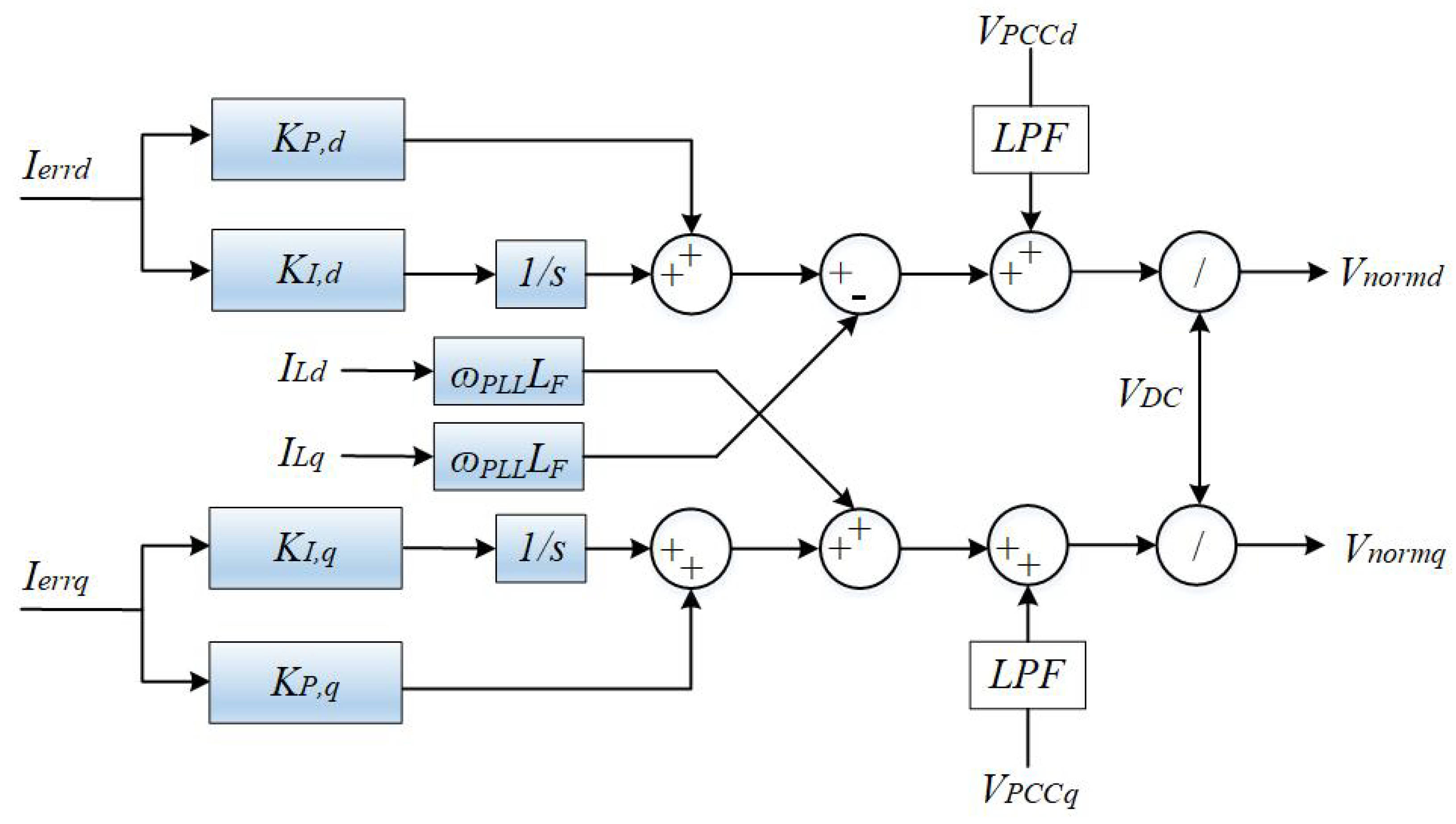
2.3. Current Controller
2.4. Alternating Voltage Controller (AVC)
2.5. Time Delay
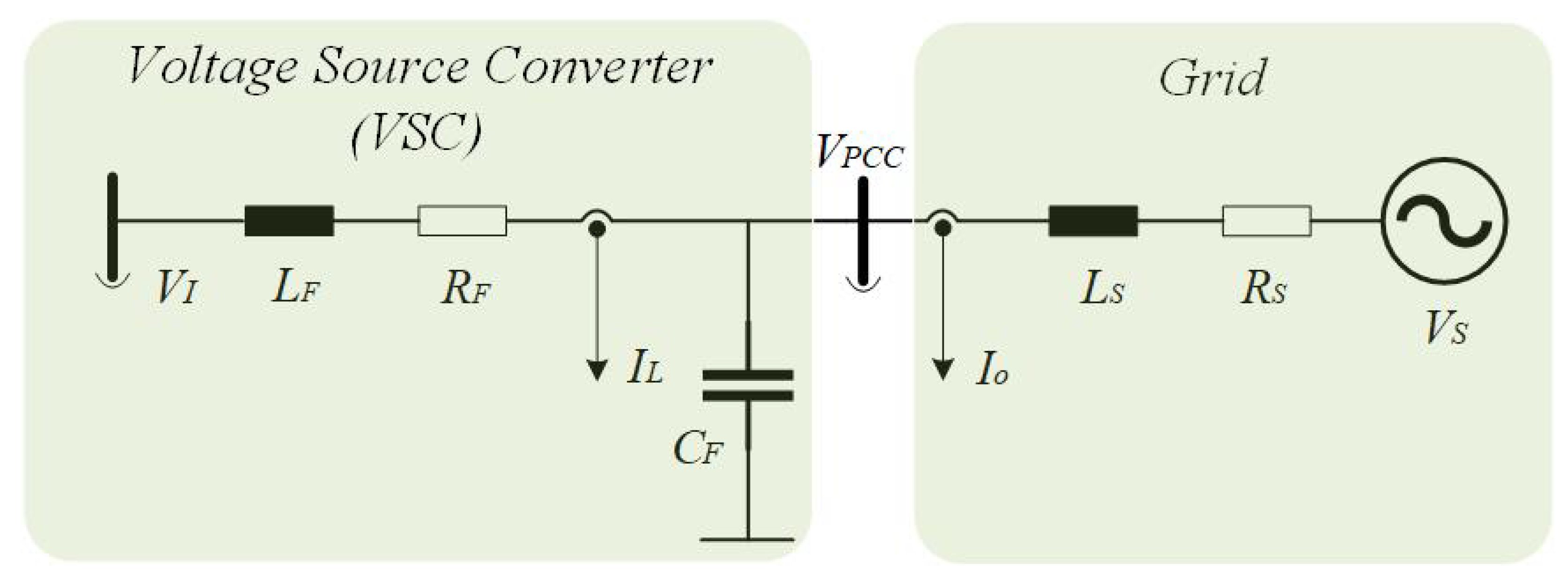
2.6. LC Filter and Grid-Side Impedance
3. Small-Signal Stability Analysis Assessment Based on Eigenvalue Analysis
3.1. Equilibrium Points Computation
3.2. Grid strength and Eigenvalue-Based Stability Analysis
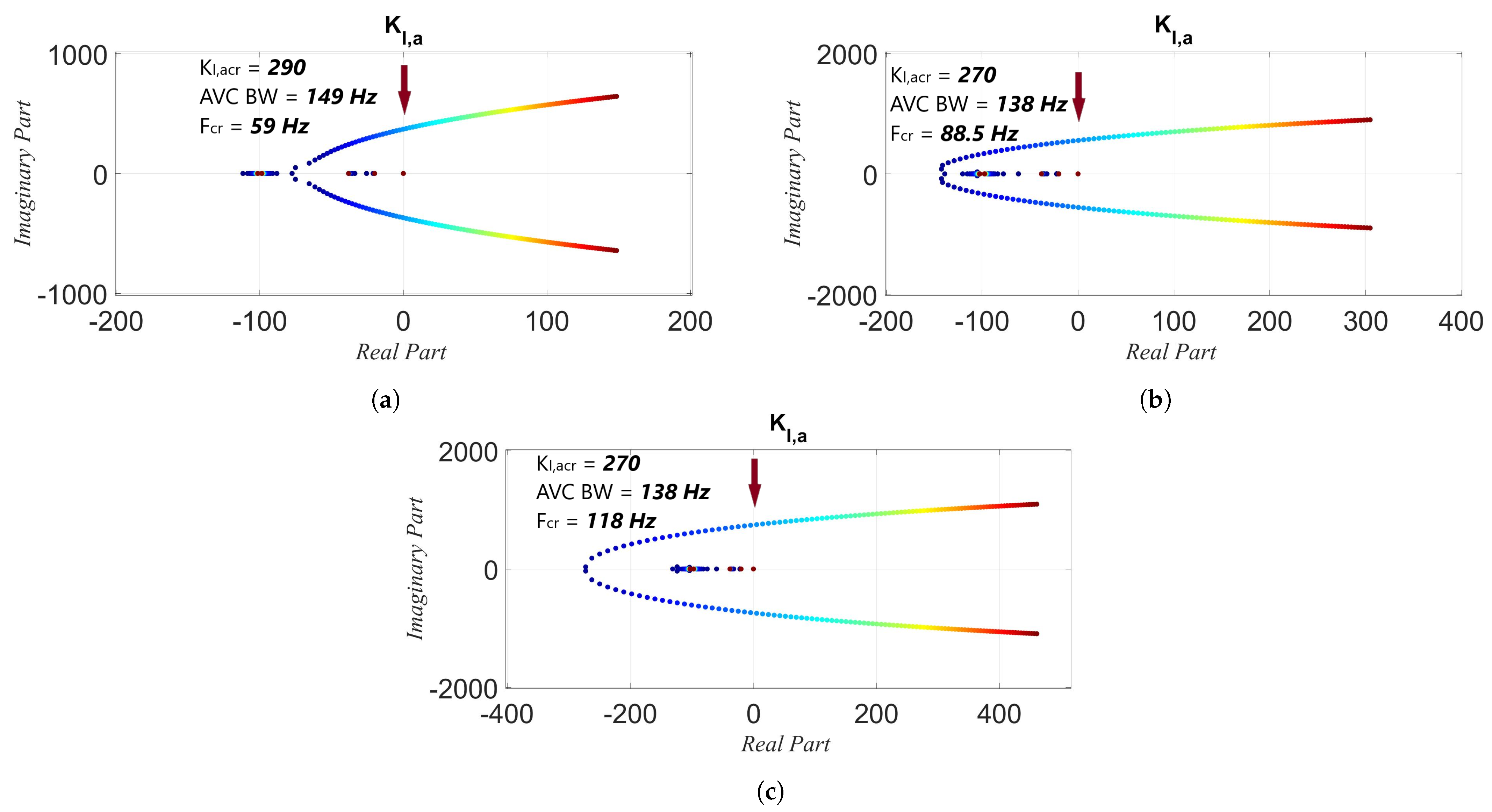
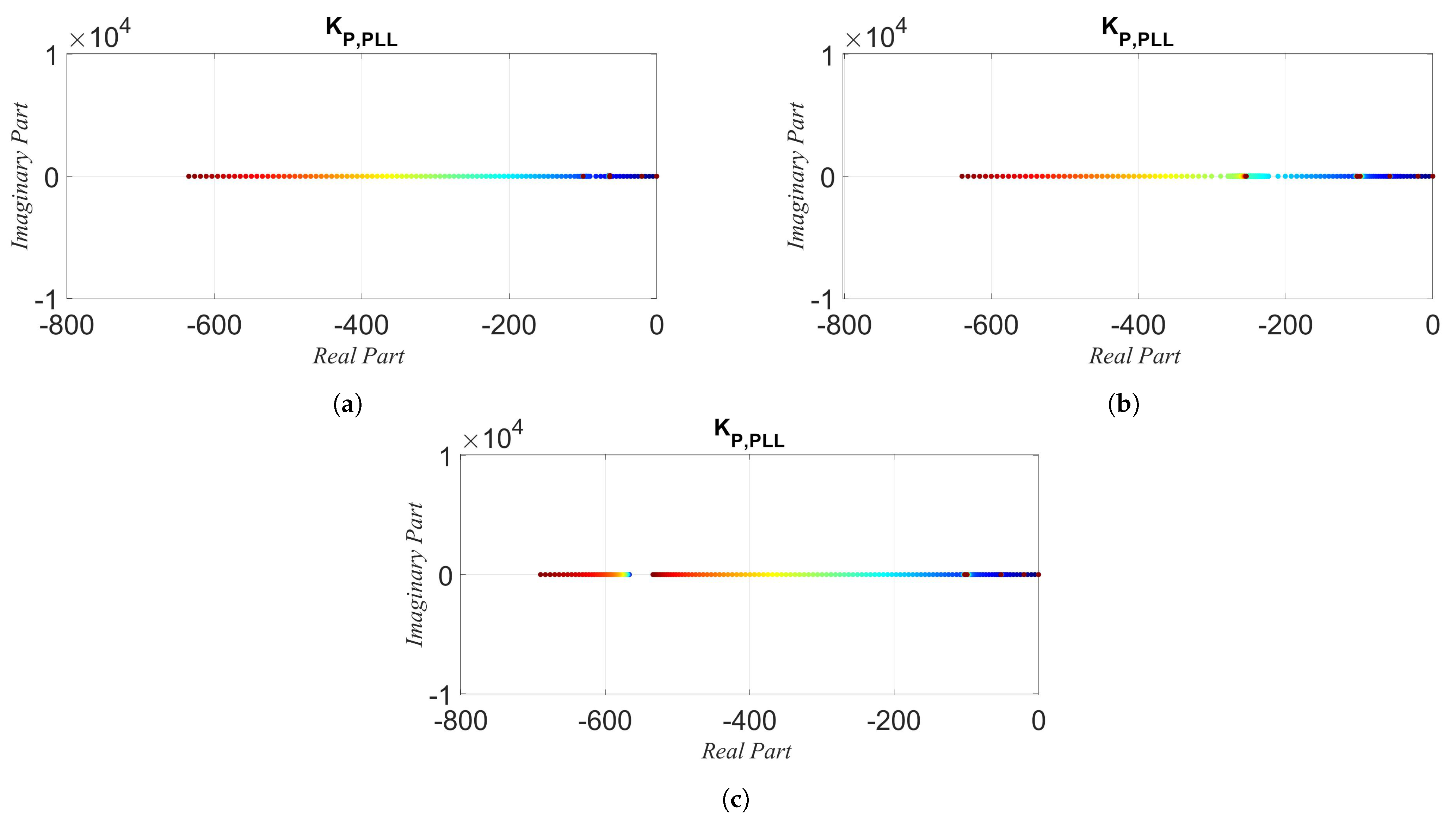
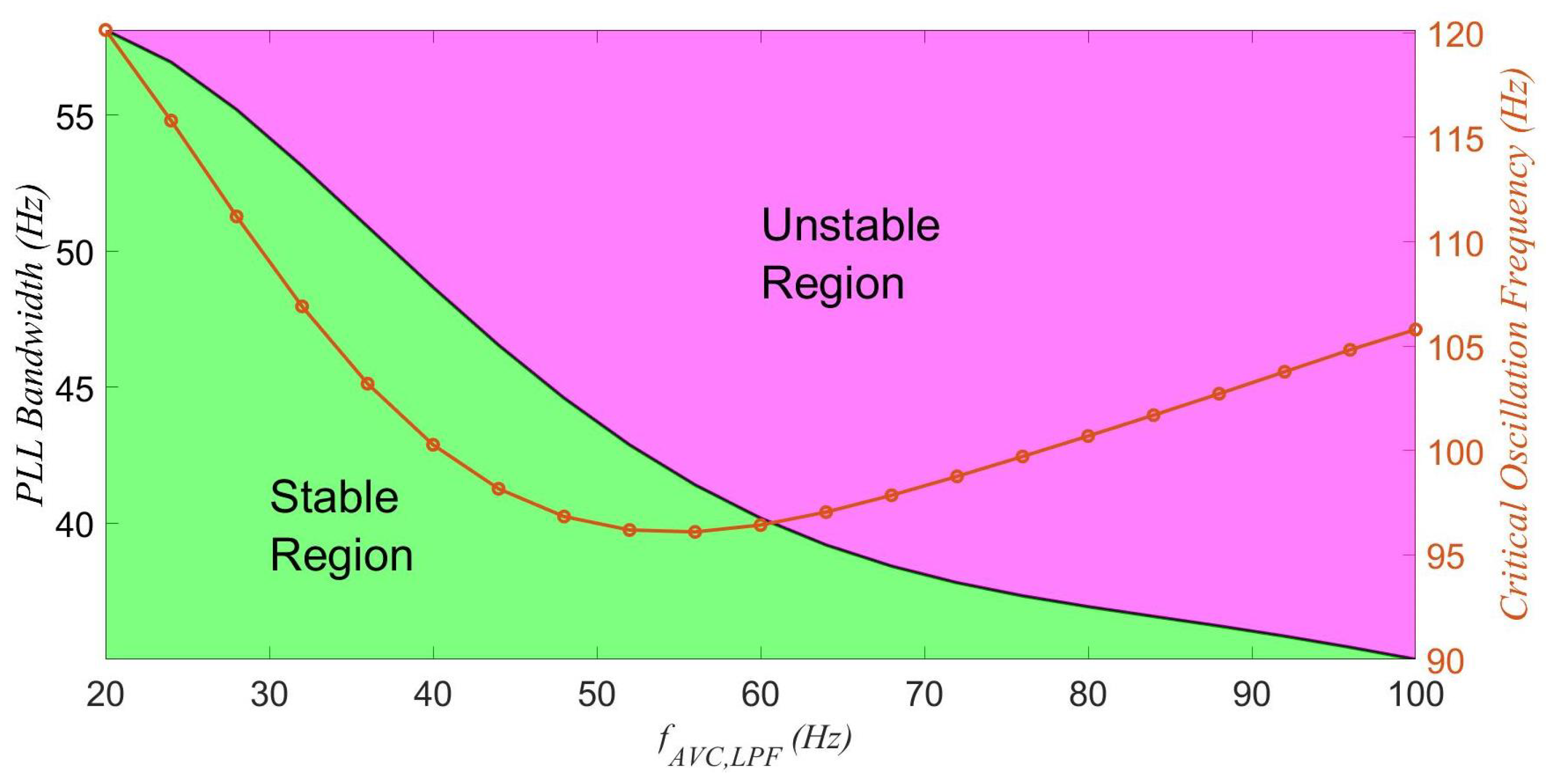
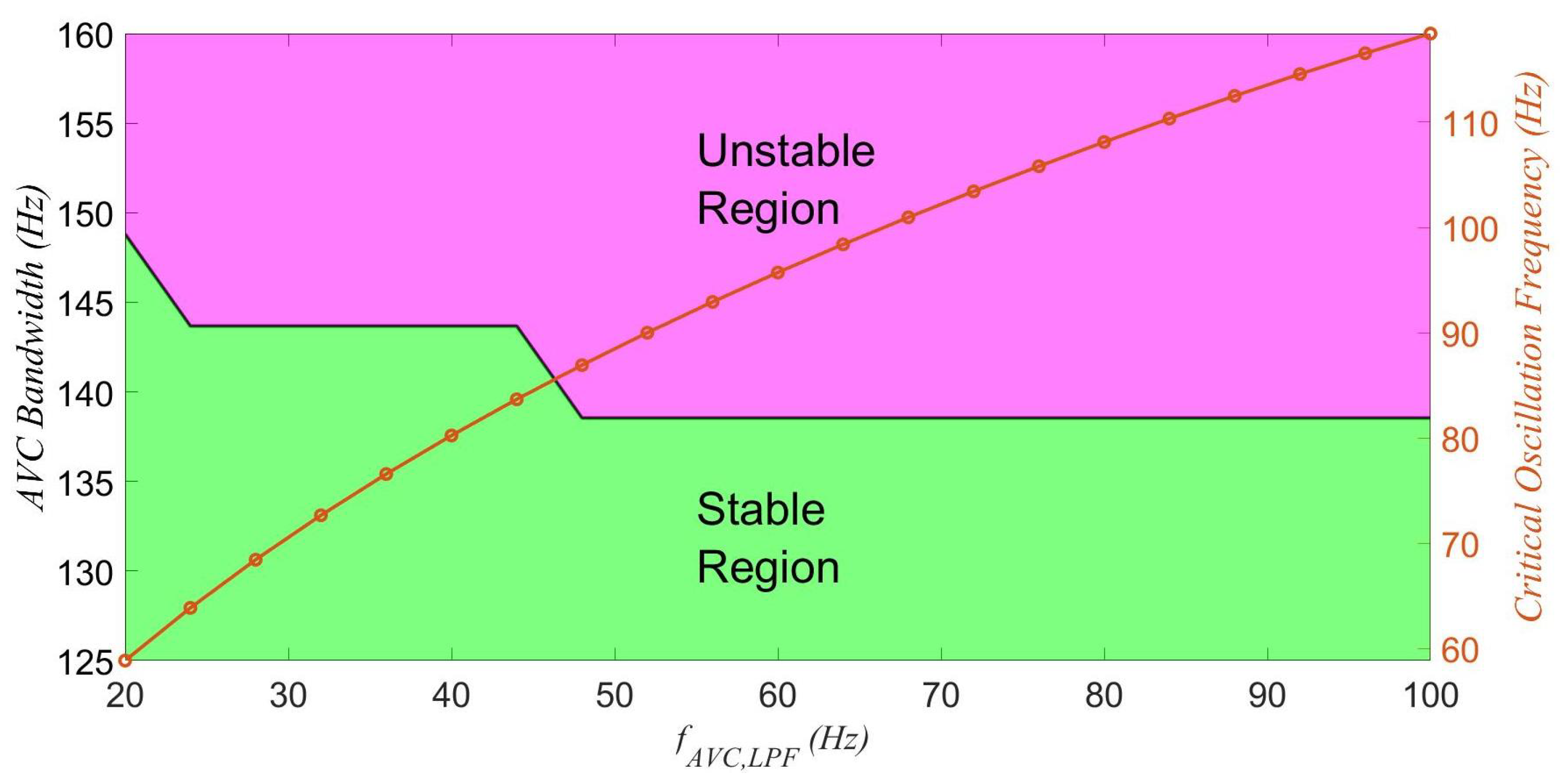
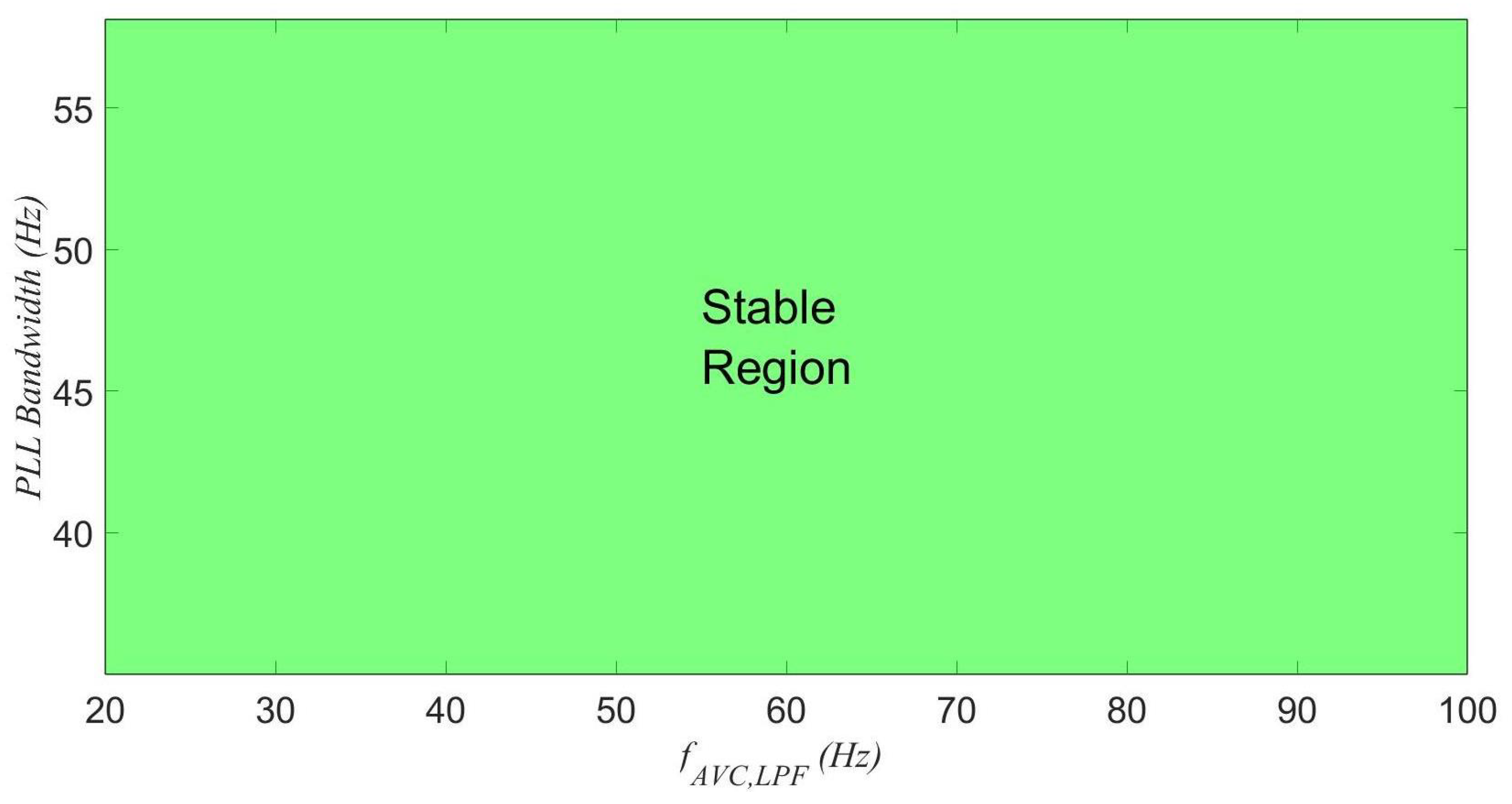
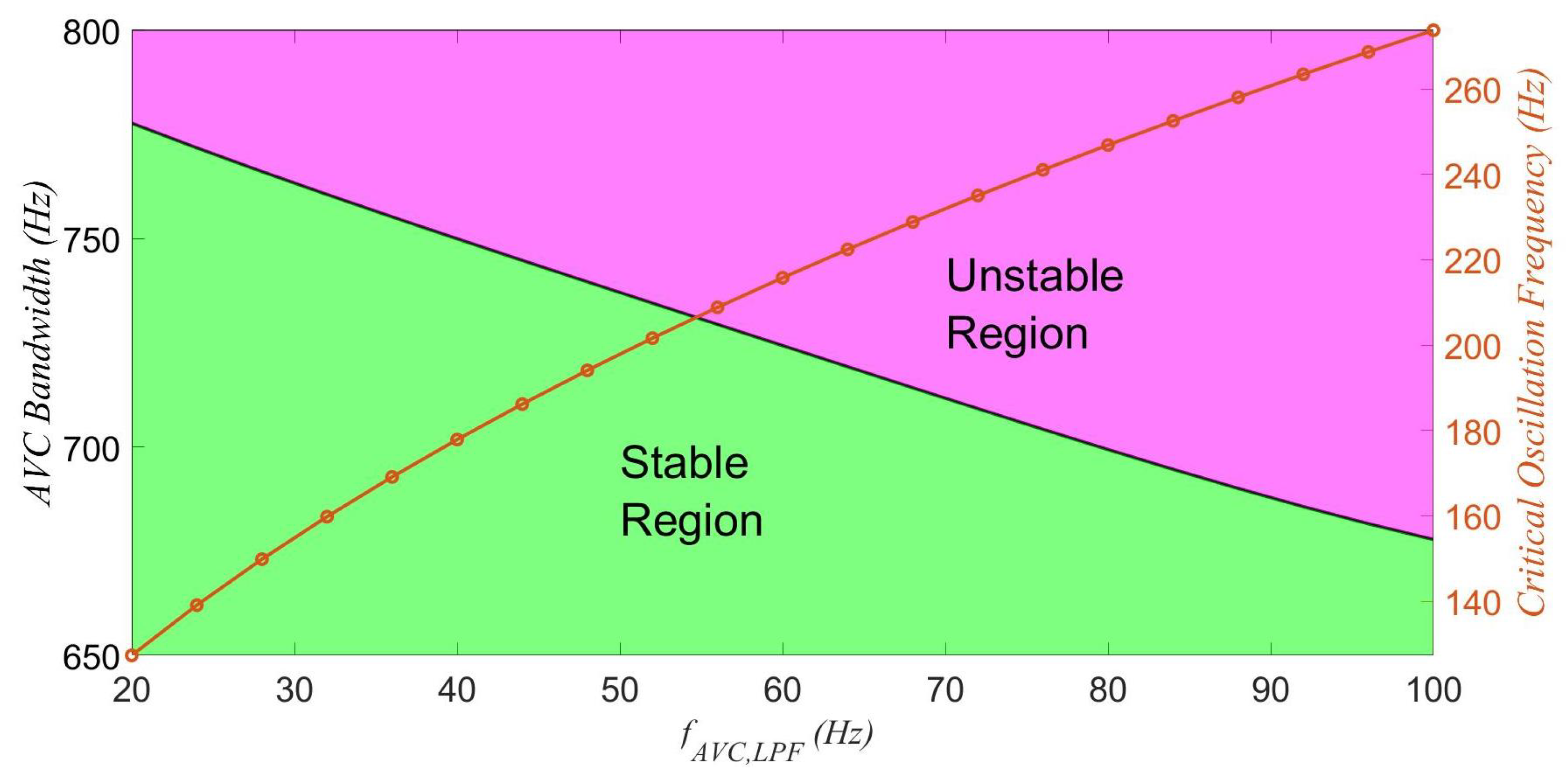
4. Stability Regions of PLL and AVC Depending on the AVC’s LPF Cutoff Frequency
5. Simulation Results
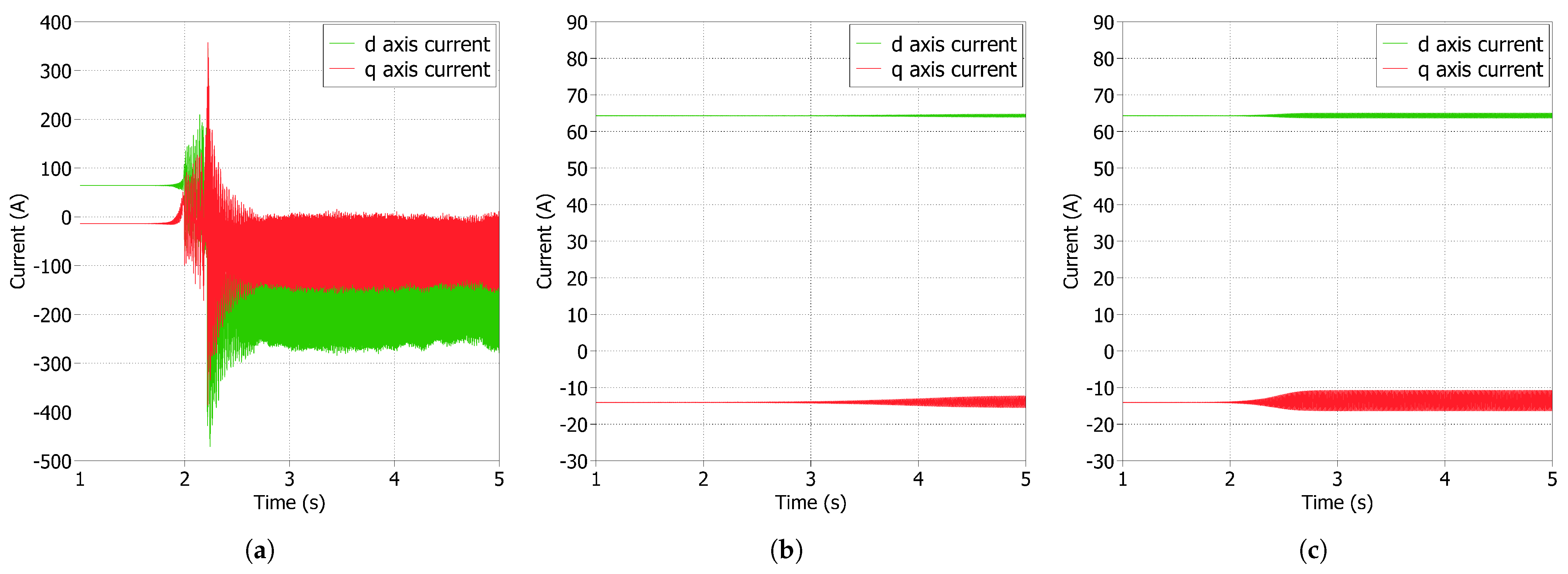
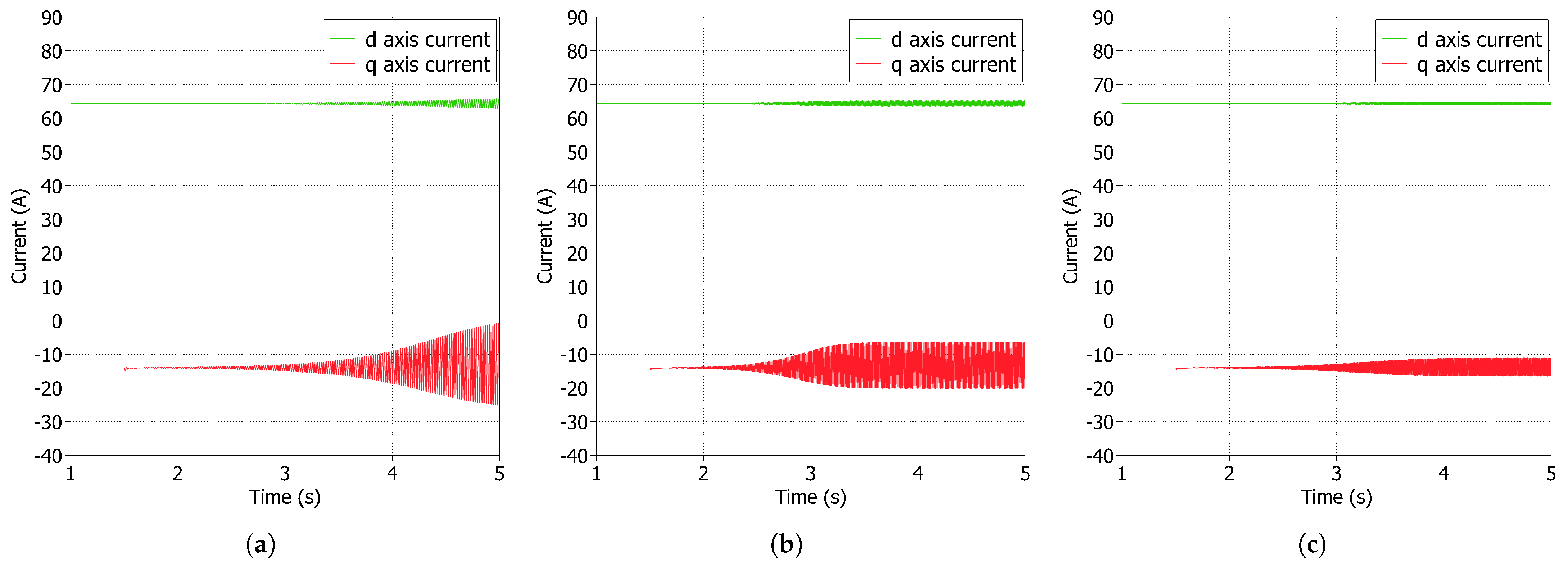
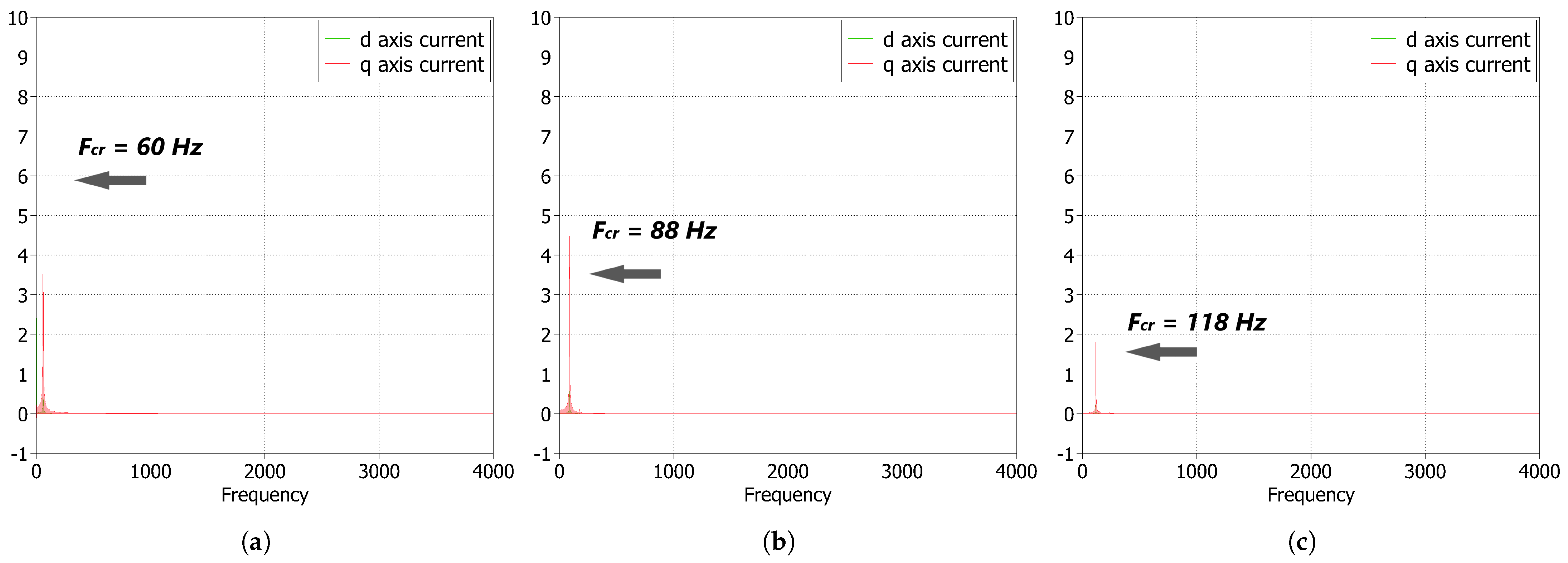
5.1. Time Domain Analysis in Weak Grid Case Scenario
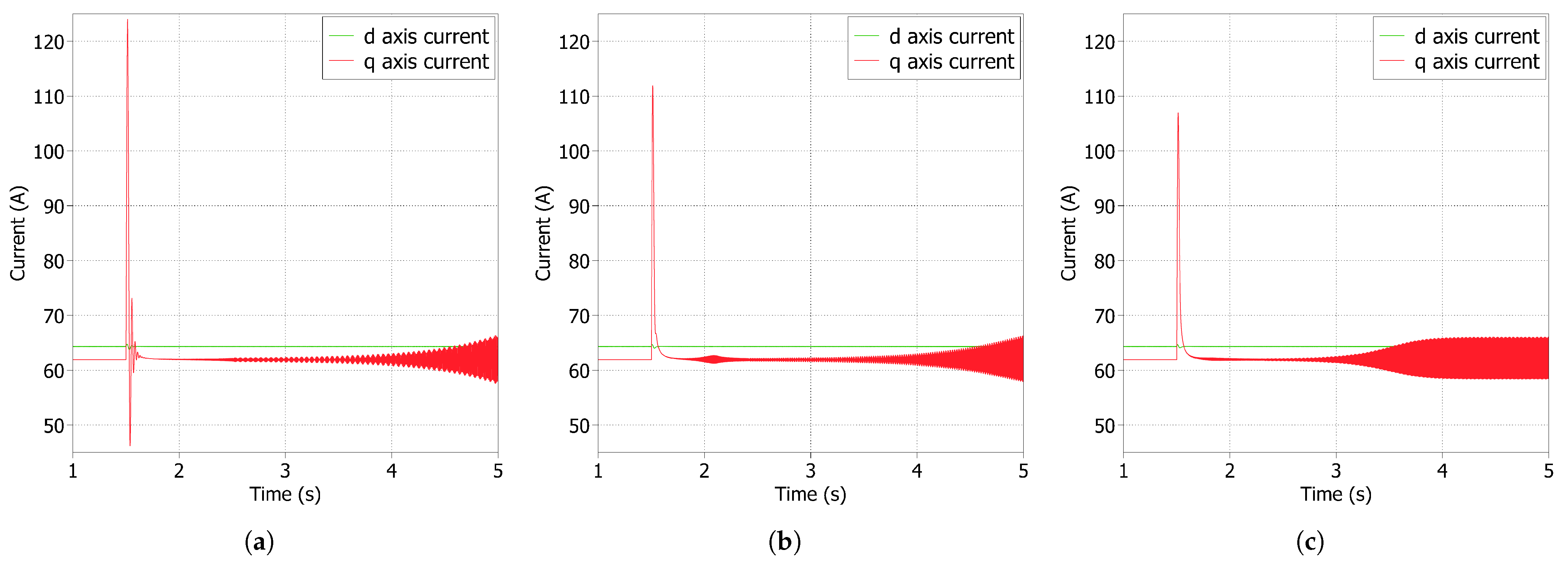
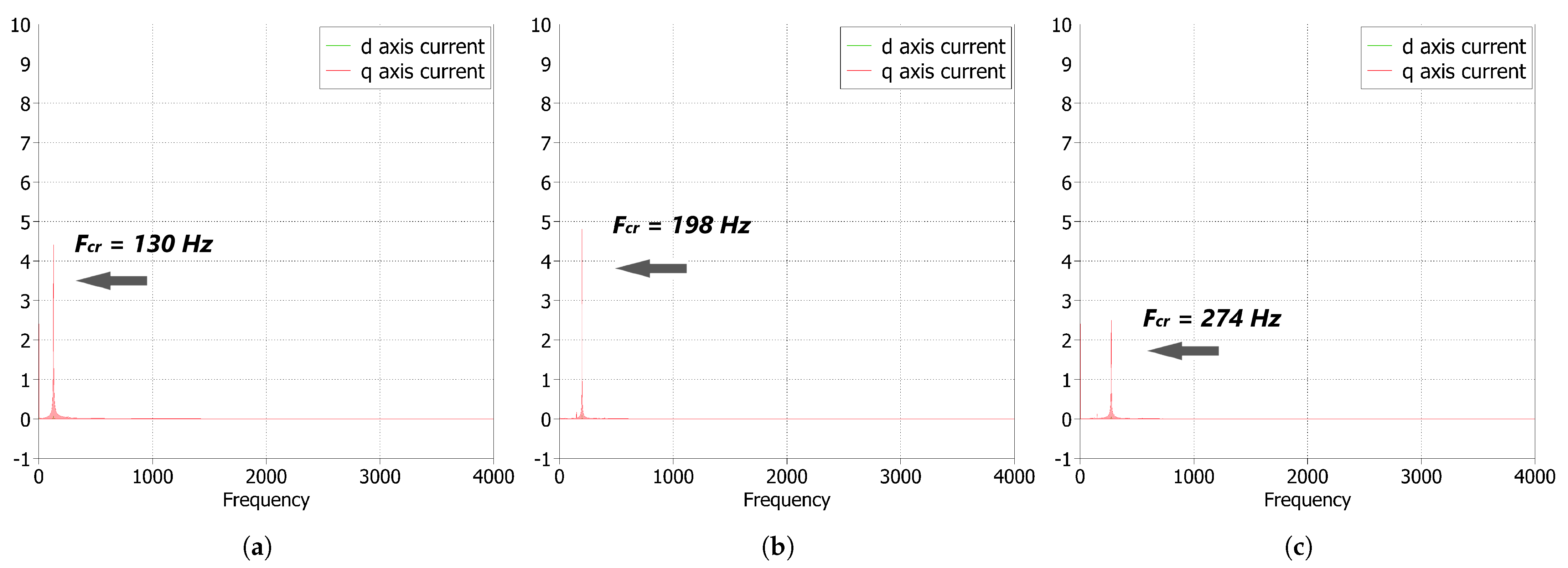
5.2. Time Domain Analysis in Strong Grid Case Scenario
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value | |
|---|---|---|
| VS | Grid Phase Voltage (peak value) | 311 V |
| fn | Rated Frequency | 50 Hz |
| VDC | DC Link Voltage Reference | 800 V |
| LF | Filter Inductance | 5 mH |
| RF | Filter Resistance | 0.1 |
| CF | Filter Capacitance | 10 F |
| fsw | Switching Frequency | 20 kHz |
| fS | Sampling Frequency | 20 kHz |
| VPCCref | Reference PCC Voltage (peak value) | 280 V |
| Pref | Nominal Active Power | 30 kW |
| ωFF,LPF | Cutoff Frequency of Feedforward Voltage | 100 rad/s |
| KI0 | Default Integral Gain of Current Control | 666.7 |
| KP0 | Default Proportional Gain of Current Control | 33.3 |
| KI,PLL0 | Default Integral Gain of PLL | 0 |
| KP,PLL0 | Default Proportional Gain of PLL | 0.1637 |
| KI,a0 | Default Integral Gain of AVC | 100 |
| KP,a0 | Default Proportional Gain of AVC | 0 |
References
- GWEC: Global Wind Report 2022. Available online: https://gwec.net/globalwind-report-2022/ (accessed on 24 November 2022).
- Barnes, M.; Beddard, A. Voltage Source Converter HVDC Links—The State of the Art and Issues Going Forward. Energy Procedia 2012, 24, 108–122. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodrguez, P. Control of Power Converters in AC Microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Ahmed, N.; Haider, A.; Van Hertem, D.; Zhang, L.; Nee, H.-P. Prospects and Challenges of future HVDC SuperGrids with Modular Multilevel Converters. In Proceedings of the 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011; pp. 1–10. [Google Scholar]
- Zou, C.; Rao, H.; Xu, S.; Li, Y.; Li, W.; Chen, J.; Zhao, X.; Yang, Y.; Lei, B. Analysis of Resonance Between a VSC-HVDC Converter and the AC Grid. IEEE Trans. Power Electron. 2018, 33, 10157–10168. [Google Scholar] [CrossRef]
- Li, C. Unstable Operation of Photovoltaic Inverter from Field Experiences. IEEE Trans. Power Deliv. 2017, 33, 1013–1015. [Google Scholar] [CrossRef]
- Buchhagen, C.; Rauscher, C.; Menze, A.; Jung, J. BorWin1—First Experiences with Harmonic Interactions in Converter Dominated Grids. In Proceedings of the International ETG Congress 2015; Die Energiewende—Blueprints for the New Energy Age, Bonn, Germany, 17–18 November 2015; pp. 27–33. [Google Scholar]
- Kocewiak, Ł.; Blasco-Gimenez, R.; Buchhagen, C.; Kwon, J.B.; Sun, Y.; Schwanka Trevisan, A.; Larsson, M.; Wang, X. Overview, Status and Outline of Stability Analysis in Converter-based Power Systems. In Proceedings of the 19th Wind Integration Workshop, Online, 11–12 November 2020; pp. 1–10. [Google Scholar]
- Wang, X.; Taul, M.G.; Wu, H.; Liao, Y.; Blaabjerg, F.; Harnefors, L. Grid-Synchronization Stability of Converter-Based Resources—An Overview. IEEE Open J. Ind. Appl. 2020, 1, 115–134. [Google Scholar] [CrossRef]
- Wang, X.; Harnefors, L.; Blaabjerg, F. A Unified Impedance Model of Grid-Connected Voltage-Source Converters. IEEE Trans. Power Electron. 2017, 33, 1775–1787. [Google Scholar] [CrossRef]
- Wang, X.; Loh, P.C.; Blaabjerg, F. Stability Analysis and Controller Synthesis for Single-Loop Voltage-Controlled VSIs. IEEE Trans. Power Electron. 2017, 32, 7394–7404. [Google Scholar] [CrossRef]
- Harnefors, L.; Bongiorno, M.; Lundberg, S. Input-Admittance Calculation and Shaping for Controlled Voltage-Source Converters. IEEE Trans. Ind. Electron. 2007, 54, 3323–3334. [Google Scholar] [CrossRef]
- Zhang, H.; Harnefors, L.; Wang, X.; Hasler, J.-P.; Ostlund, S.; Danielsson, C.; Gong, H. Loop-at-a-Time Stability Analysis for Grid-Connected Voltage-Source Converters. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 5807–5821. [Google Scholar] [CrossRef]
- Kroutikova, N.; Hernandez-Aramburo, C.A.; Green, T.C. State-Space Model of Grid-Connected Inverters under Current Control Mode. IET Electr. Power Appl. 2007, 1, 329–338. [Google Scholar] [CrossRef] [Green Version]
- Gontijo, G.F.; Bakhshizadeh, M.K.; Kocewiak, Ł.H.; Teodorescu, R. State Space Modeling of an Offshore Wind Power Plant With an MMC-HVDC Connection for an Eigenvalue-Based Stability Analysis. IEEE Access 2022, 10, 82844–82869. [Google Scholar] [CrossRef]
- Zhou, J.Z.; Ding, H.; Fan, S.; Zhang, Y.; Gole, A.M. Impact of Short-Circuit Ratio and Phase-Locked-Loop Parameters on the Small-Signal Behavior of a VSC-HVDC Converter. IEEE Trans. Power Deliv. 2014, 29, 2287–2296. [Google Scholar] [CrossRef]
- Amin, M.; Suul, J.A.; D’Arco, S.; Tedeschi, E.; Molinas, M. Impact of State-Space Modelling Fidelity on the Small-Signal Dynamics of VSC-HVDC Systems. In Proceedings of the 11th IET International Conference on AC and DC Power Transmission, Birmingham, UK, 10–12 February 2015; pp. 1–11. [Google Scholar]
- Rezaee, S.; Radwan, A.; Moallem, M.; Wang, J. Voltage Source Converters Connected to Very Weak Grids: Accurate Dynamic Modeling, Small-Signal Analysis, and Stability Improvement. IEEE Access 2020, 8, 201120–201133. [Google Scholar] [CrossRef]
- Musengimana, A.; Li, H.; Zheng, X.; Yu, Y. Small-Signal Model and Stability Control for Grid-Connected PV Inverter to a Weak Grid. Energies 2021, 14, 3907. [Google Scholar] [CrossRef]
- Gholami-Khesht, H.; Davari, P.; Novak, M.; Blaabjerg, F. A Probabilistic Framework for the Robust Stability and Performance Analysis of Grid-Tied Voltage Source Converters. Appl. Sci. 2022, 12, 7375. [Google Scholar] [CrossRef]
- Agbemuko, A.J.; Domínguez-García, J.L.; Gomis-Bellmunt, O.; Harnefors, L. Passivity-based Analysis and Performance Enhancement of a Vector Controlled VSC Connected to a Weak AC Grid. IEEE Trans. Power Deliv. 2020, 36, 156–167. [Google Scholar] [CrossRef]
- Dimitropoulos, D.; Wang, X.; Blaabjerg, F. Small-Signal Stability Analysis of Grid-Connected Converter under Different Grid Strength Cases. In Proceedings of the 2022 IEEE 13th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Kiel, Germany, 26–29 June 2022; pp. 1–6. [Google Scholar]
- Wen, B.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Analysis of dq small-signal impedance of grid-tied inverters. IEEE Trans. Power Electron. 2015, 31, 675–687. [Google Scholar] [CrossRef]
- Rosso, R. Stability Analysis of Converter Control Strategies for Power Electronics-Dominated Power Systems. Ph.D. Thesis, Christian-Albrecht University of Kiel, Kiel, Germany, 2020. [Google Scholar]





















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dimitropoulos, D.; Wang, X.; Blaabjerg, F. Stability Impacts of an Alternate Voltage Controller (AVC) on Wind Turbines with Different Grid Strengths. Energies 2023, 16, 1440. https://doi.org/10.3390/en16031440
Dimitropoulos D, Wang X, Blaabjerg F. Stability Impacts of an Alternate Voltage Controller (AVC) on Wind Turbines with Different Grid Strengths. Energies. 2023; 16(3):1440. https://doi.org/10.3390/en16031440
Chicago/Turabian StyleDimitropoulos, Dimitrios, Xiongfei Wang, and Frede Blaabjerg. 2023. "Stability Impacts of an Alternate Voltage Controller (AVC) on Wind Turbines with Different Grid Strengths" Energies 16, no. 3: 1440. https://doi.org/10.3390/en16031440
APA StyleDimitropoulos, D., Wang, X., & Blaabjerg, F. (2023). Stability Impacts of an Alternate Voltage Controller (AVC) on Wind Turbines with Different Grid Strengths. Energies, 16(3), 1440. https://doi.org/10.3390/en16031440