
Regional Load Frequency Control of BP-PI Wind Power Generation Based on Particle Swarm Optimization

Abstract
:1. Introduction
- (1)
- The BP neural network algorithm has the defects of slow convergence speed and local minimization, which are mainly due to the random selection of initial weights [26]. In this paper, the optimal initial neuron connection weights of the BP-PI controller are determined by combining IPSO with its fast convergence speed and global optimization features. Thus, the individual parameters of the PI controller are continuously adjusted by the improved BPNN algorithm, which can achieve better dynamic performance.
- (2)
- Coordinating modern artificial intelligence control with traditional PI control can effectively improve the efficiency and accuracy of an algorithm [27]. The proposed strategy applied to the wind turbine can effectively increase the anti-interference ability of the wind power region, enhance the stability of the power system, and thus have a promising development prospect in the field of new energy power generation.
2. System Dynamics
3. Frame and Algorithm of Wind Turbine
3.1. Particle Swarm Optimization Analysis
3.1.1. Basic Particle Swarm Optimization Algorithm
3.1.2. Improvement in Particle Swarm Optimization Algorithm
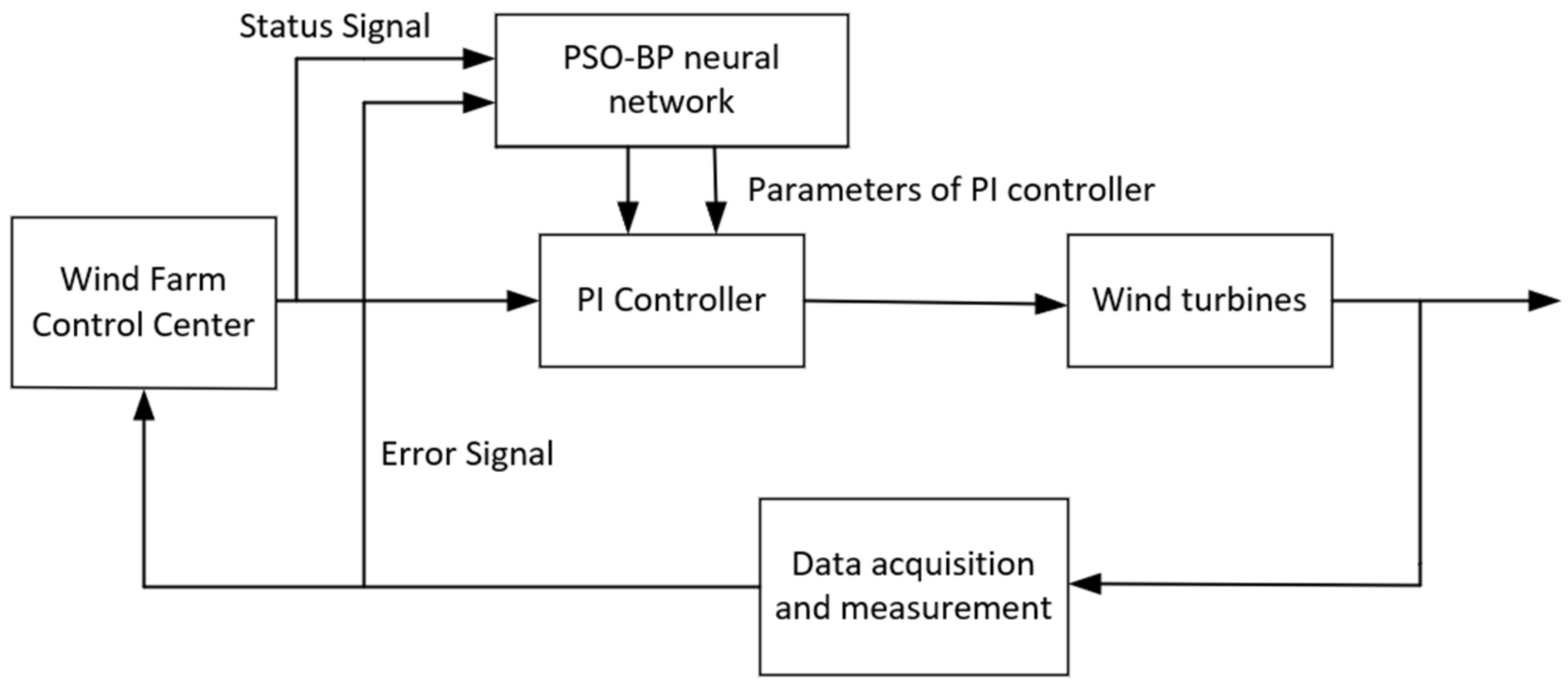
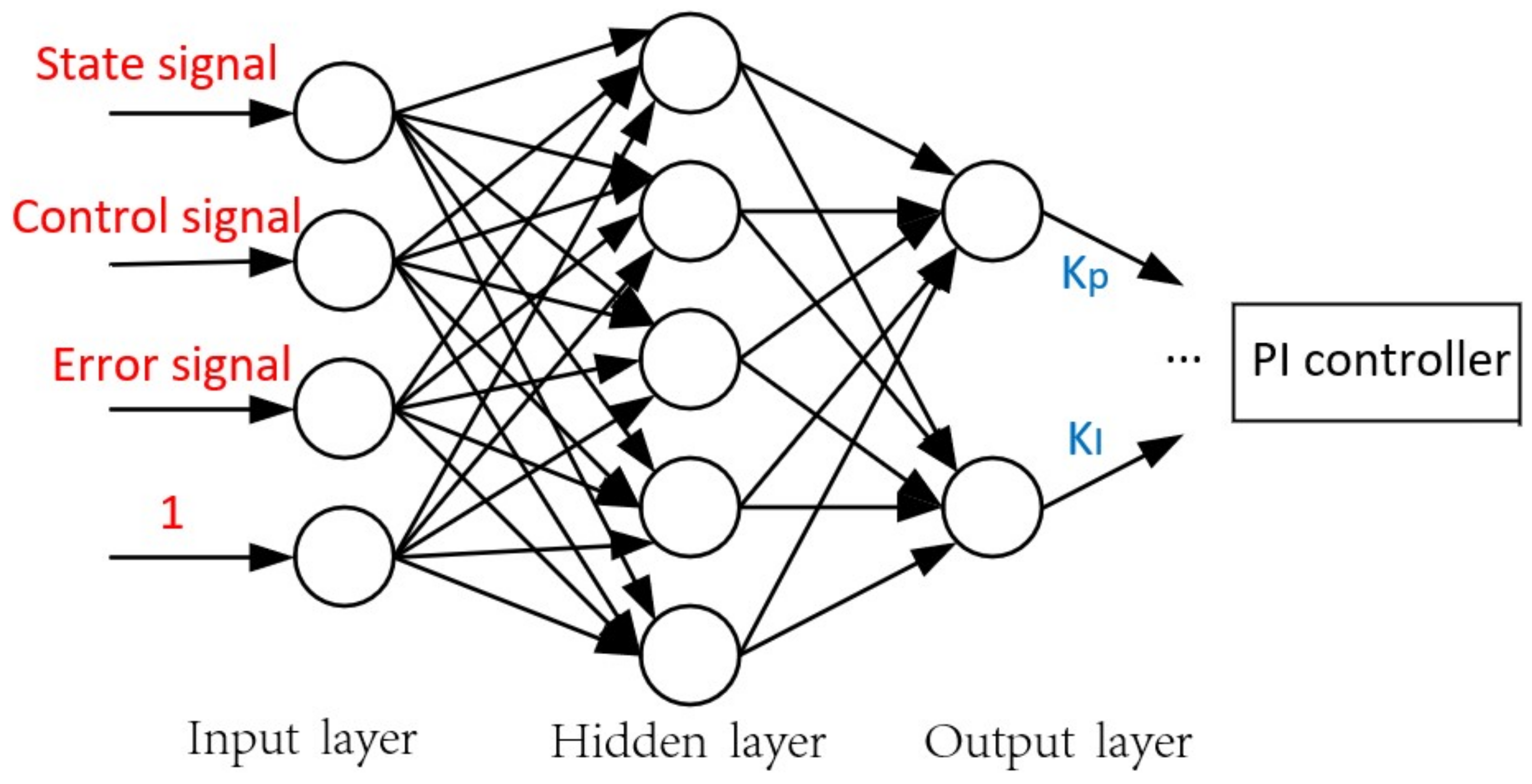
3.2. Principle and Framework of BP-PI Control Algorithm
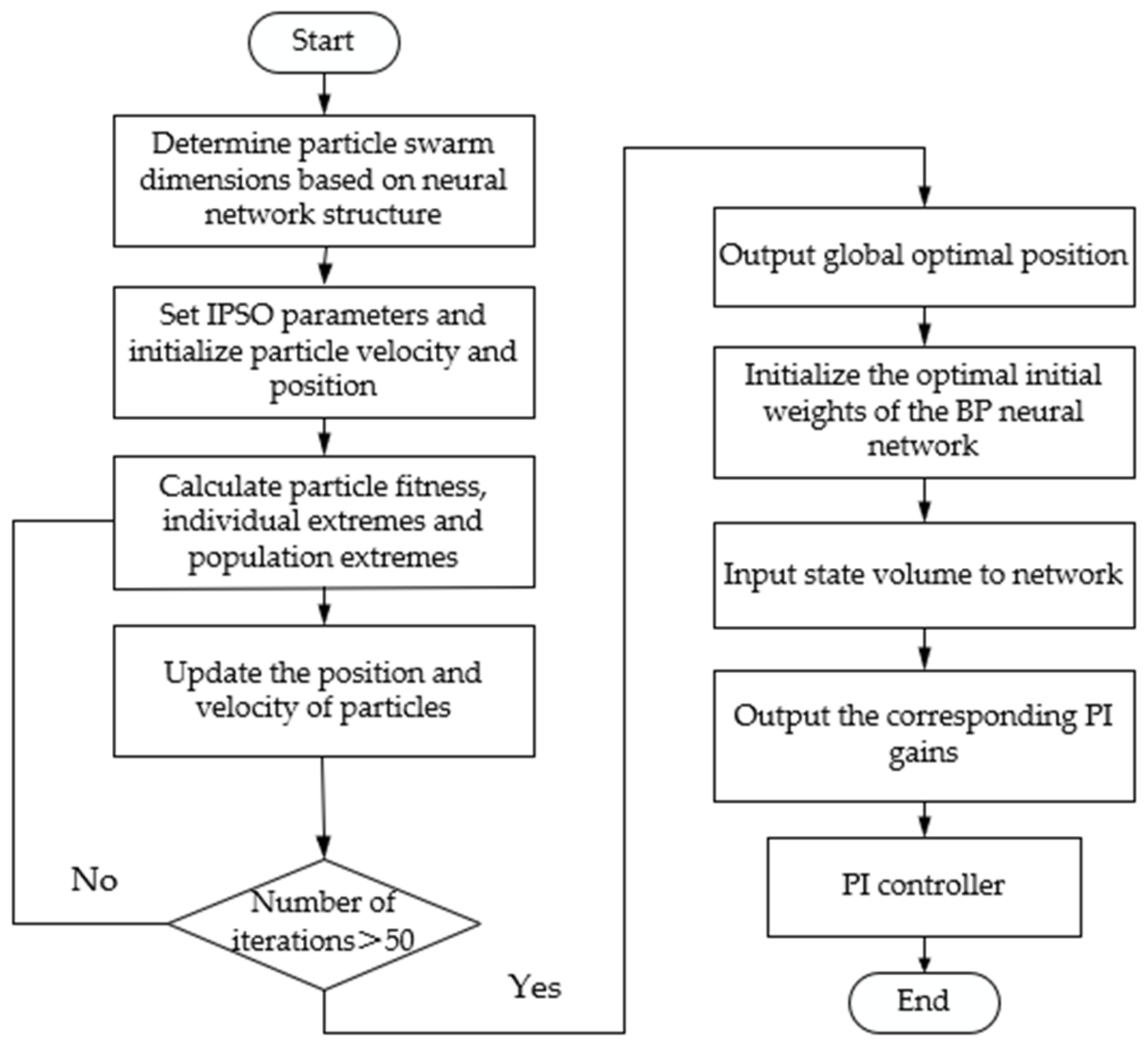
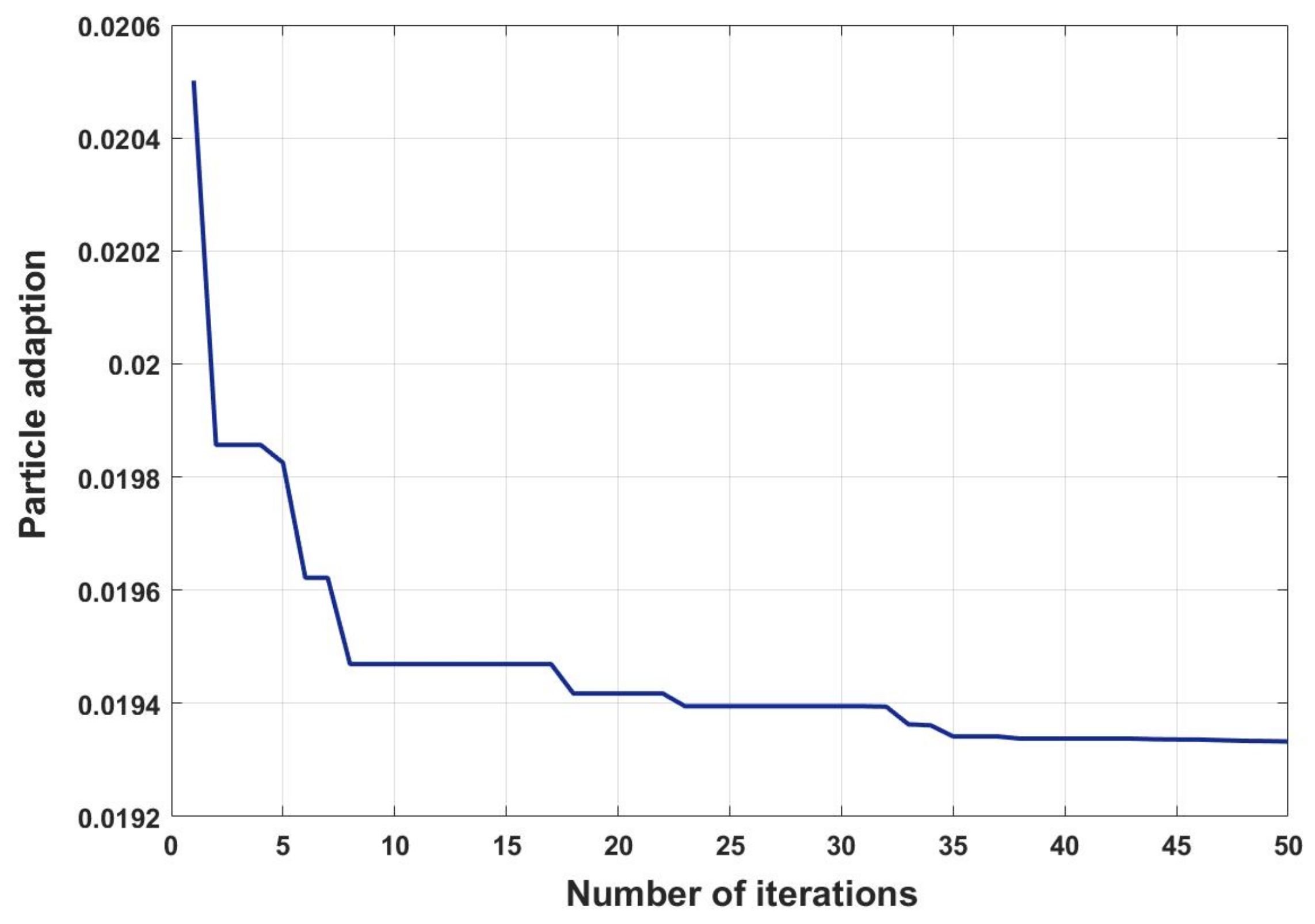
3.3. Specific Implementation Process of IPSO-BPNN-PI-Based Secondary Frequency Control
4. Simulation and Discussion
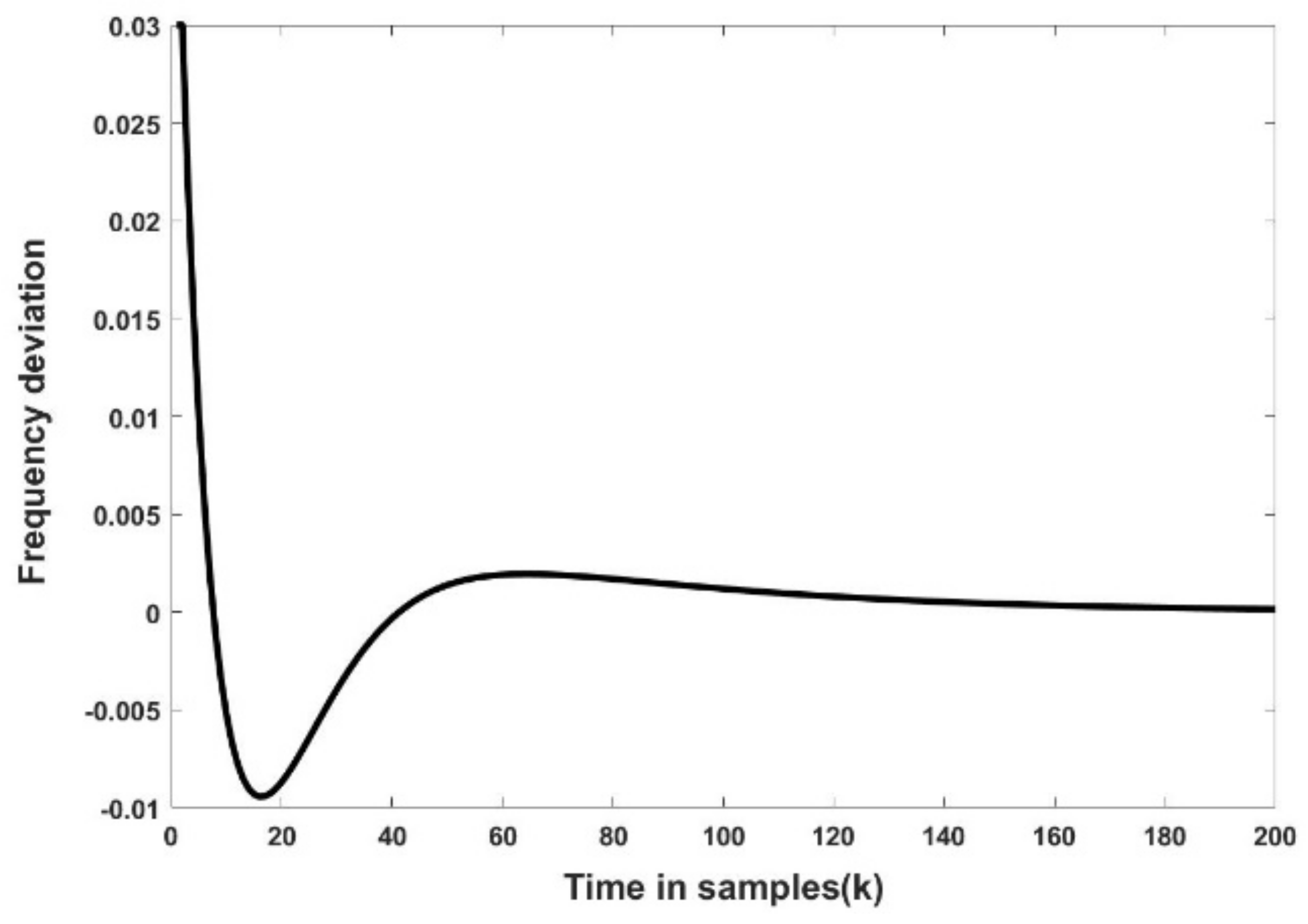
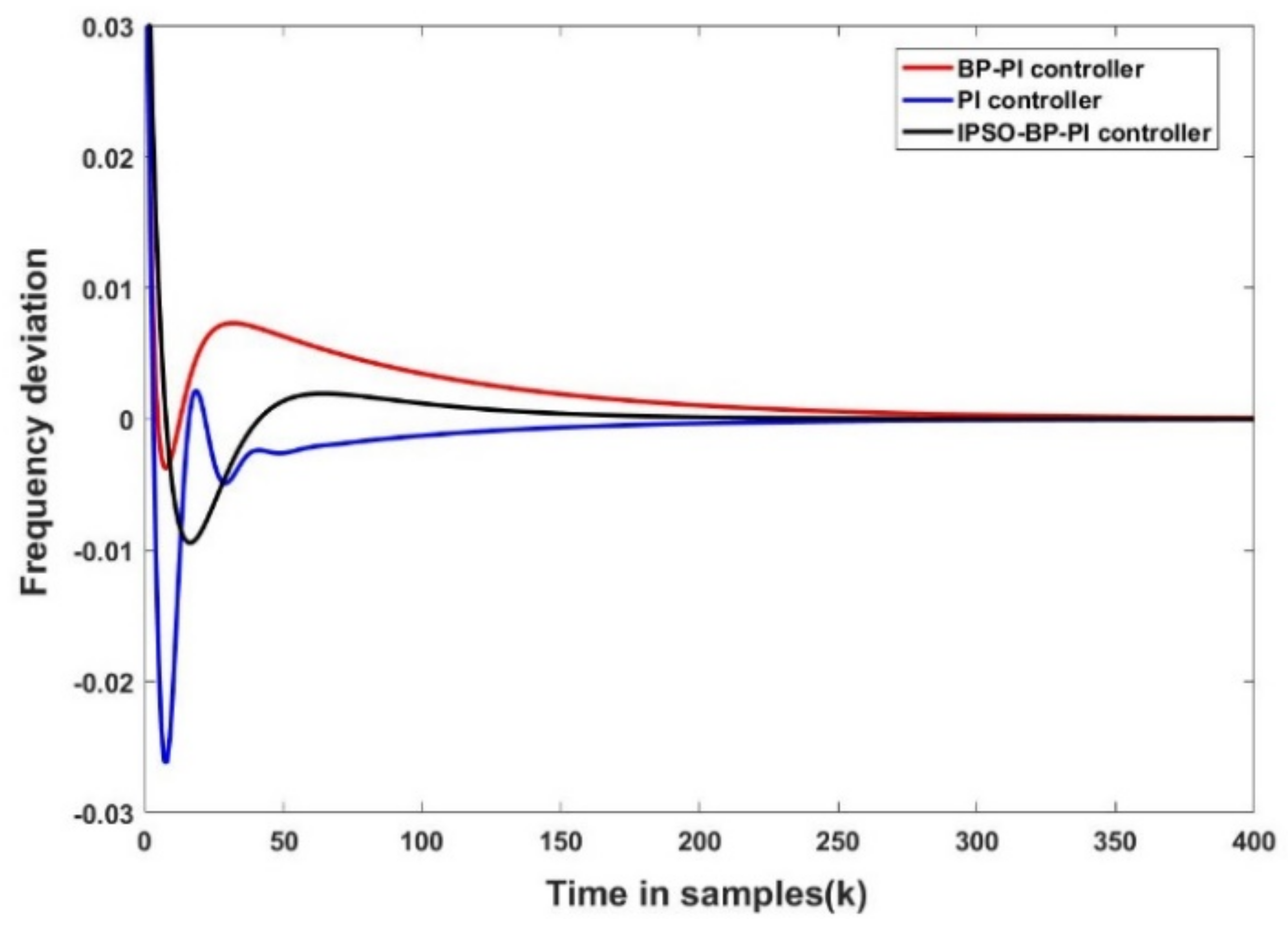
- Case study one: Frequency adjustment in the presence of initial frequency errors
- Case study two: Adjustment process with application of random load disturbance
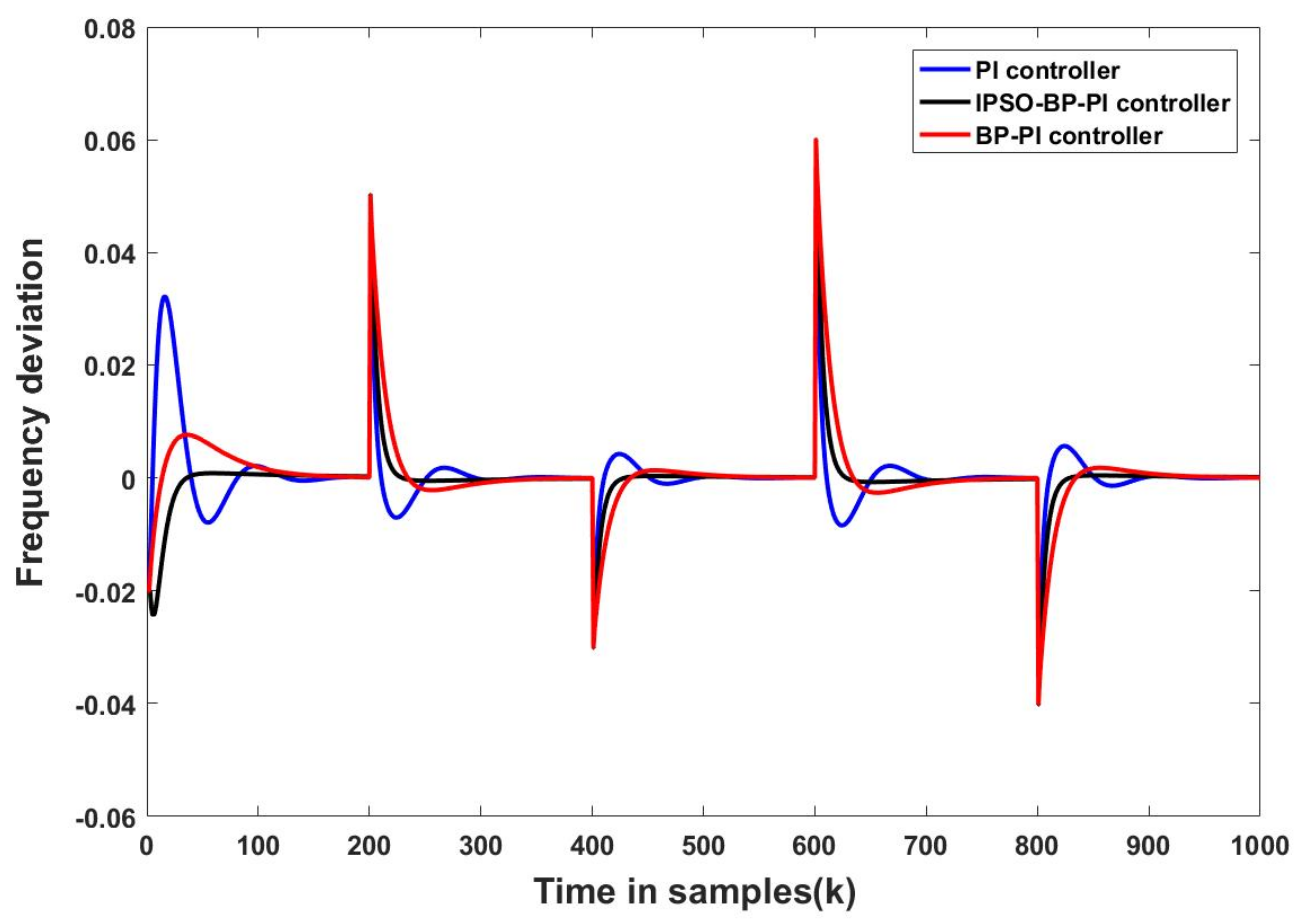
- Case study three: Frequency tuning with perturbations applied at subsequent intervals
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sadorsky, P. Wind energy for sustainable development: Driving factors and future outlook. J. Clean. Prod. 2021, 289, 125779. [Google Scholar] [CrossRef]
- Veerasamy, V.; Wahab, N.I.A.; Ramachandran, R.; Othman, M.L.; Hizam, H.; Irudayaraj, A.X.R.; Guerrero, J.M.; Kumar, J.S. A Hankel Matrix Based Reduced Order Model for Stability Analysis of Hybrid Power System Using PSO-GSA Optimized Cascade PI-PD Controller for Automatic Load Frequency Control. IEEE Access 2020, 8, 71422–71446. [Google Scholar] [CrossRef]
- Liu, F.; Ma, J. Equivalent input disturbance-based robust LFC strategy for power system with wind farms. IET Gener. Transm. Distrib. 2018, 12, 4582–4588. [Google Scholar] [CrossRef]
- Mohseni, N.; Bayati, N. Robust Multi-Objective H2/H∞ Load Frequency Control of Multi-Area Interconnected Power Systems Using TS Fuzzy Modeling by Considering Delay and Uncertainty. Energies 2022, 15, 5525. [Google Scholar] [CrossRef]
- Debnath, M. Whale Optimization Algorithm Tuned Fuzzy Integrated PI Controller for LFC Problem in Thermal-hydro-wind Interconnected System. In Applications of Computing, Automation and Wireless Systems in Electrical Engineering: Proceedings of MARC 2018; Springer: Singapore, 2019; pp. 67–77. [Google Scholar]
- Payal, R.; Kumar, D. Load Frequency Control of Wind Integrated Power System Using Intelligent Control Techniques. Int. J. Adv. Eng. Manag. (IJAEM) 2021, 3, 1339–1353. [Google Scholar]
- Fan, W.; Hu, Z.; Veerasamy, V. PSO-Based Model Predictive Control for Load Frequency Regulation with Wind Turbines. Energies 2022, 15, 8219. [Google Scholar] [CrossRef]
- Abhayadev, S.; Kumar, P.R. Effect of DFIG Wind Turbines on LFC in a Sliding Mode Controlled Power System. In Proceedings of the 6th International Conference for Convergence in Technology (I2CT), Maharashtra, India, 2–4 April 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Abazari, A.; Monsef, H.; Wu, B. Load frequency control by de-loaded wind farm using the optimal fuzzy-based PID droop controller. IET Renew. Power Gener. 2018, 13, 180–190. [Google Scholar] [CrossRef]
- Yan, Z.; Xu, Y. Data-Driven Load Frequency Control for Stochastic Power Systems: A Deep Reinforcement Learning Method with Continuous Action Search. IEEE Trans. Power Syst. 2018, 34, 1653–1656. [Google Scholar] [CrossRef]
- Xu, Z.; Wang, D.; Yi, G.; Hu, Z. Asynchronous Tracking Control of Amplitude Signals in Vibratory Gyroscopes with Partially Unknown Mode Information. IEEE Trans. Ind. Electron. 2022, 1–10. [Google Scholar] [CrossRef]
- Hu, Z.; Liu, S.; Luo, W.; Wu, L. Intrusion-Detector-Dependent Distributed Economic Model Predictive Control for Load Frequency Regulation with PEVs Under Cyber Attacks. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 3857–3868. [Google Scholar] [CrossRef]
- Hu, Z.; Liu, S.; Wu, L. Credibility-based distributed frequency estimation for plug-in electric vehicles participating in load frequency control. Int. J. Electr. Power Energy Syst. 2021, 130, 106997. [Google Scholar] [CrossRef]
- Ma, M.; Liu, X.; Zhang, C. LFC for multi-area interconnected power system concerning wind turbines based on DMPC. IET Gener. Transm. Distrib. 2017, 11, 2689–2696. [Google Scholar] [CrossRef]
- Zhang, K.; Zhou, B.; Duan, G. Event-Triggered and Self-Triggered Control of Discrete-Time Systems with Input Constraints. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 1948–1957. [Google Scholar] [CrossRef]
- Mohamed, T.H.; Alamin, M.A.M.; Hassan, A.M. A novel adaptive load frequency control in single and interconnected power systems. Ain Shams Eng. J. 2020, 12, 1763–1773. [Google Scholar] [CrossRef]
- Navarrete, E.C.; Trejo Perea, M.; Jáuregui Correa, J.C.; Carrillo Serrano, R.V.; Moreno, G.J.R. Expert Control Systems Implemented in a Pitch Control of Wind Turbine: A Review. IEEE Access 2019, 7, 13241–13259. [Google Scholar] [CrossRef]
- Yu, T.; Liu, J.; Zeng, Y.; Zhang, X.; Zeng, Q.; Wu, L. Stability Analysis of Genetic Regulatory Networks with Switching Parameters and Time Delays. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 3047–3058. [Google Scholar] [CrossRef] [PubMed]
- Prasad, S.; Ansari, M.R. Frequency regulation using neural network observer based controller in power system. Control Eng. Pract. 2020, 102, 104571. [Google Scholar] [CrossRef]
- Yu, T.; Zhang, X.; Wang, X. Global Exponential Stability Analysis for A Class of Coupled Cyclic Genetic Regulatory Networks with Multiple Time-Varying Delays. IFAC-PapersOnLine 2021, 54, 23–28. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, T.; Yang, X.; Yang, J. Gradient Descent-Barzilai Borwein-Based Neural Network Tracking Control for Non-linear Systems with Unknown Dynamics. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 305–315. [Google Scholar] [CrossRef] [PubMed]
- Hu, Z.; Liu, S.; Luo, W.; Wu, L. Resilient Distributed Fuzzy Load Frequency Regulation for Power Systems Under Cross-Layer Random Denial-of-Service Attacks. IEEE Trans. Cybern. 2020, 52, 2396–2406. [Google Scholar] [CrossRef] [PubMed]
- Sahu, P.C.; Mishra, S.; Prusty, R.C.; Panda, S. Improved-salp swarm optimized type-II fuzzy controller in load frequency control of multi area islanded AC microgrid. Sustain. Energy Grids Netw. 2018, 16, 380–392. [Google Scholar] [CrossRef]
- Rahman, J.; Tafticht, T.; Doumbia, M.; Mutombo, N. Dynamic Stability of Wind Power Flow and Network Frequency for a High Penetration Wind-Based Energy Storage System Using Fuzzy Logic Controller. Energies 2021, 14, 4111. [Google Scholar] [CrossRef]
- Mokhtar, M.; Marei, M.I.; Sameh, M.A.; Attia, M.A. An Adaptive Load Frequency Control for Power Systems with Renewable Energy Sources. Energies 2022, 15, 573. [Google Scholar] [CrossRef]
- Li, J.; Cheng, J.-H.; Shi, J.-Y.; Huang, F. Brief Introduction of Back Propagation (BP) Neural Network Algorithm and its Improvement. In Advances in Computer Science and Information Engineering; Springer: Berlin/Heidelberg, Germany, 2012; pp. 553–558. [Google Scholar] [CrossRef]
- Veerasamy, V.; Wahab, N.I.A.; Ramachandran, R.; Othman, M.L.; Hizam, H.; Kumar, J.S.; Irudayaraj, A.X.R. Design of single- and multi-loop self-adaptive PID controller using heuristic based recurrent neural network for ALFC of hybrid power system. Expert Syst. Appl. 2021, 192, 116402. [Google Scholar] [CrossRef]
- Panda, D.K.; Das, S.; Townley, S. Toward a More Renewable Energy-Based LFC Under Random Packet Transmissions and Delays with Stochastic Generation and Demand. IEEE Trans. Autom. Sci. Eng. 2020, 19, 1217–1232. [Google Scholar] [CrossRef]
- Shouran, M.; Anayi, F.; Packianather, M.; Habil, M. Different Fuzzy Control Configurations Tuned by the Bees Algorithm for LFC of Two-Area Power System. Energies 2022, 15, 657. [Google Scholar] [CrossRef]
- Luo, W.; Wang, F.; Li, Q.J.; Xie, H. Research on Development of Wind Power Grid Integration in China. Adv. Mater. Res. 2012, 608-609, 560–563. [Google Scholar] [CrossRef]
- Holjevac, N.; Zidar, M.; Krpan, M.; Kuzle, I. Optimizing the Grid Connection Scheme of the Wind Power Plant. In Proceedings of the 14th Conference on Sustainable Development of Energy, Water and Environment Systems (SDEWES), Dubrovnik, Croatia, 1–6 October 2019. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Physical Significance |
|---|---|
| Nominal system frequency of the power system | |
| Mechanical power of gas turbine | |
| Sudden load disturbance | |
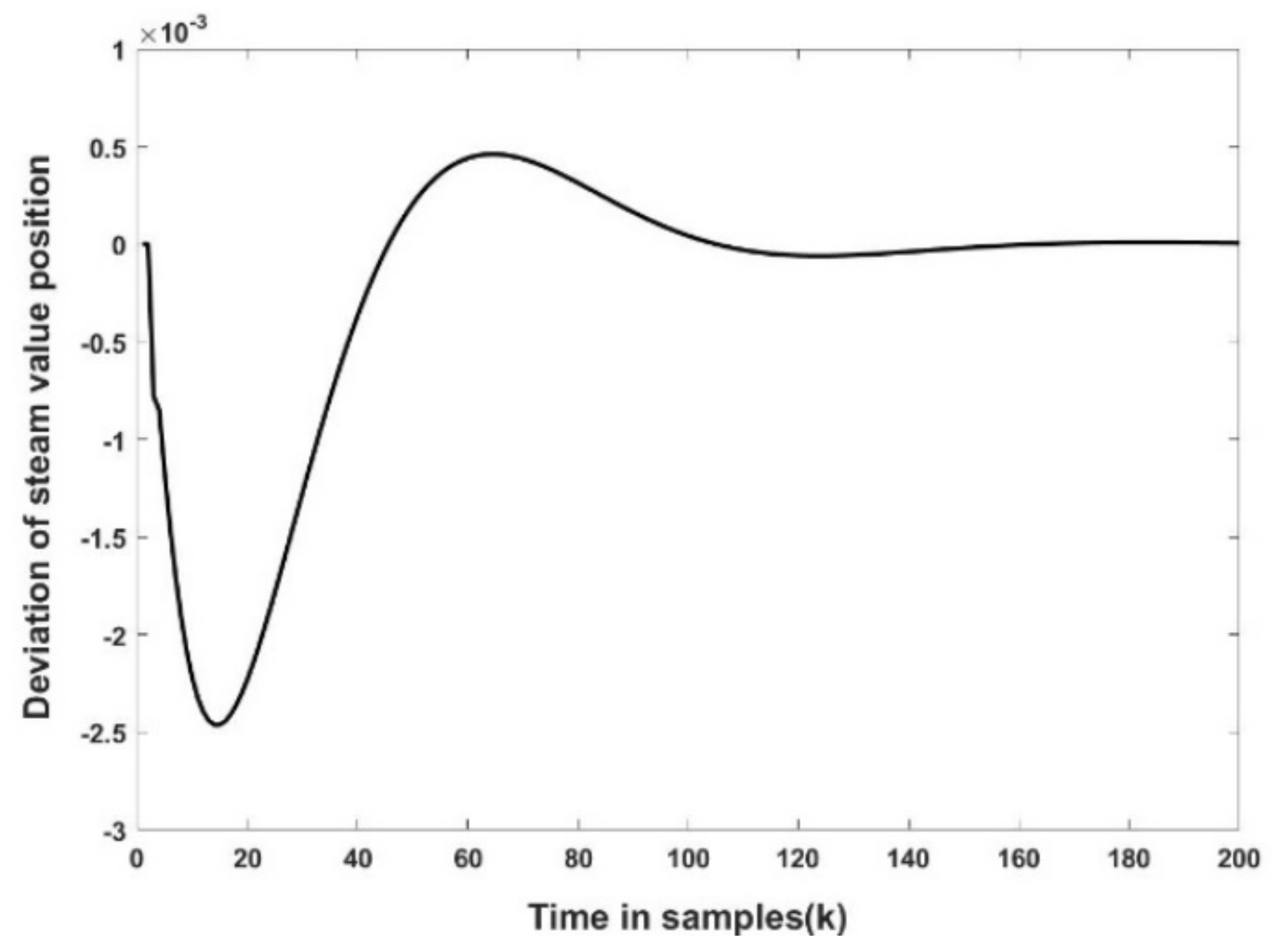
| Steam valve position | |
| Supplementary control action | |
| Angular momentum | |
| Speed governor time constant | |
| Changing time constant (prime mover) | |
| Reference setpoint | |
| Equivalent damping coefficient of generator | |
| Frequency bias constant | |
| System measurement output |
| Parameter | Max. Value | Min. Value | Stable Time | Stable Error |
|---|---|---|---|---|
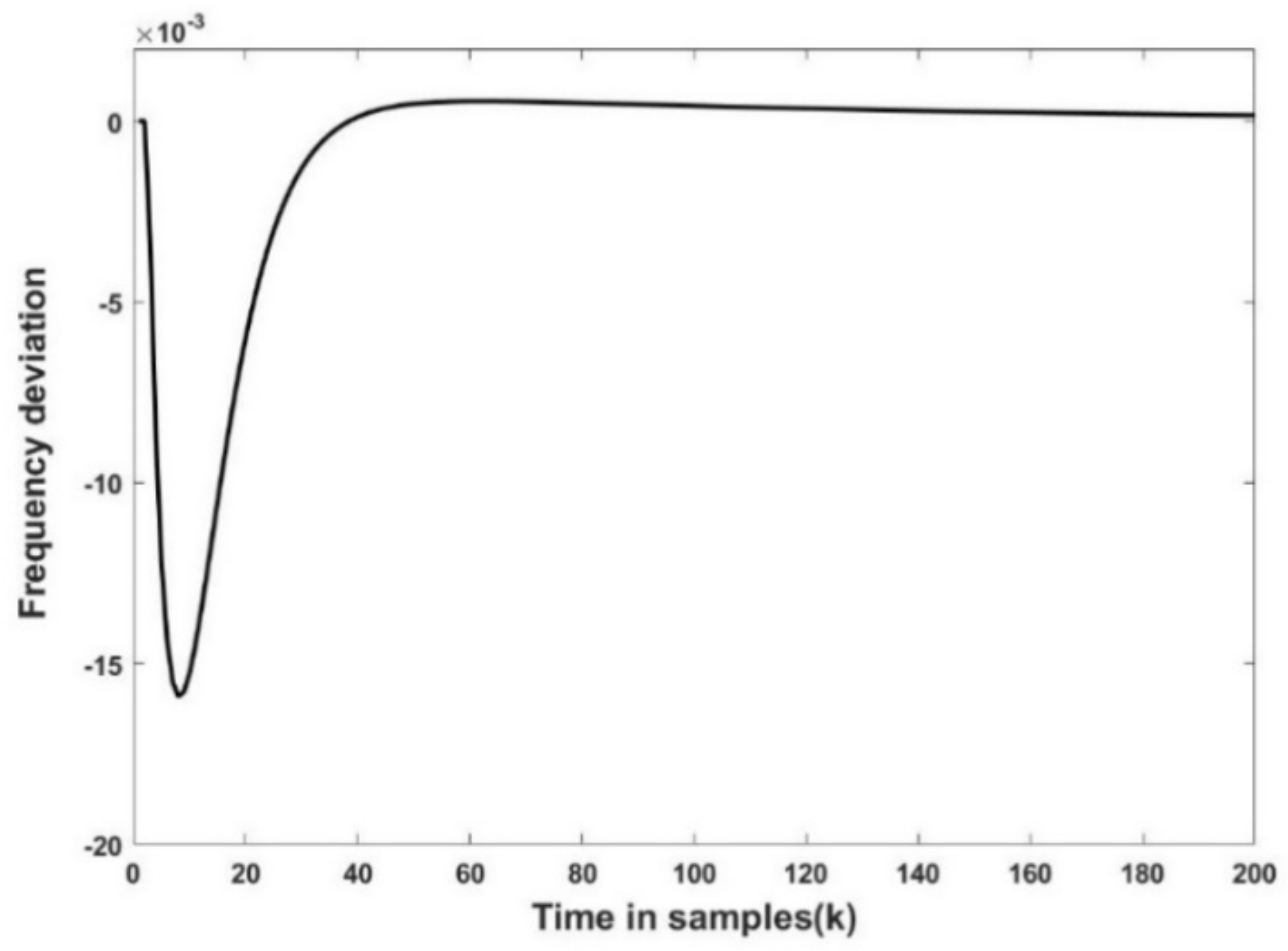
| 0.00086 | −0.01596 | 15.81 | −0.00024 | |
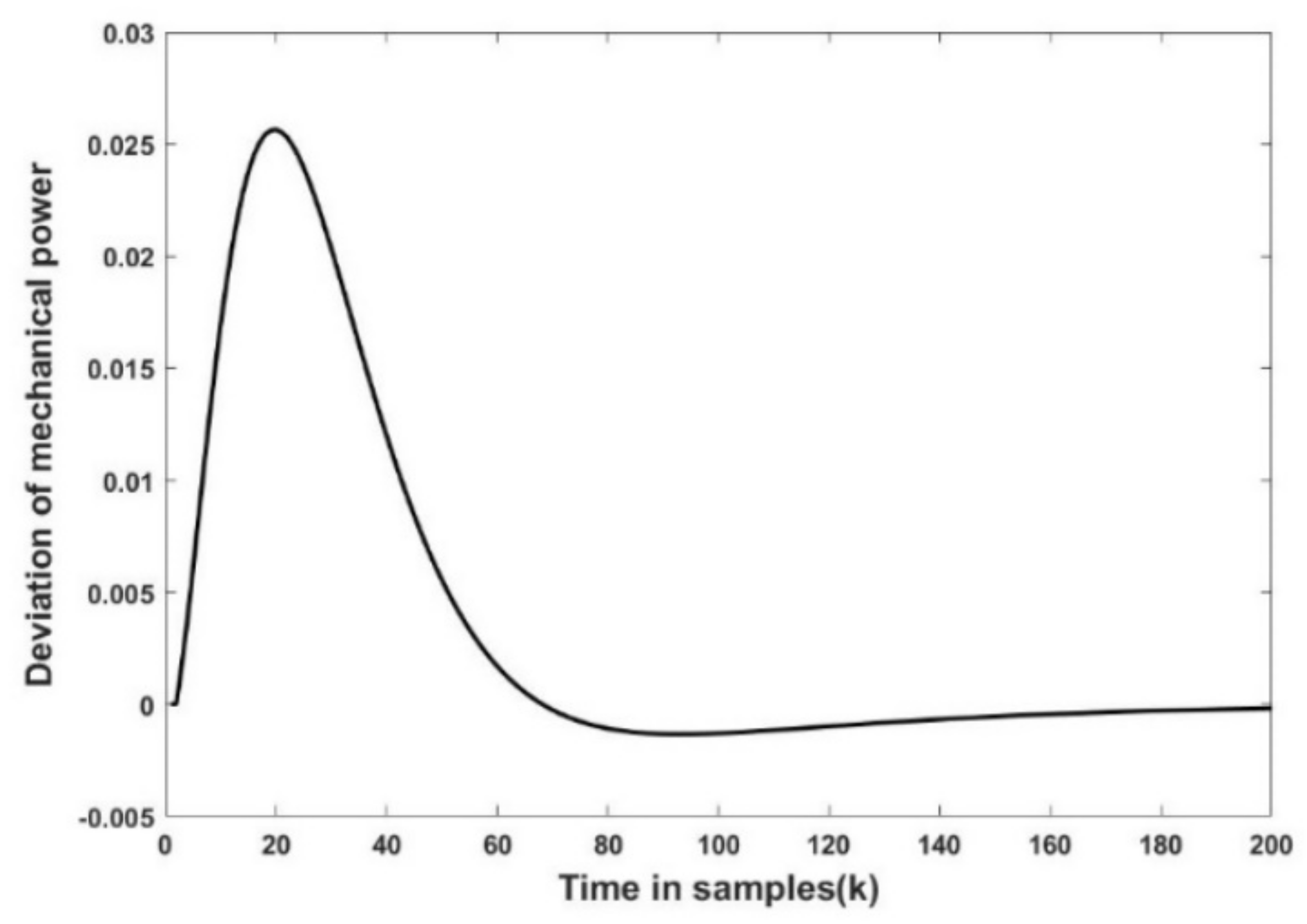
| 0.02611 | −0.00137 | 33.48 | 0.00012 | |
| 0.00047 | −0.00248 | 37.02 | 0.00007 |
| Stable Time 1 | Stable Time 2 | Stable Time 3 | Stable Time 4 | Stable Time 5 | |
|---|---|---|---|---|---|
| PI | 46.86 | 30.39 | 28.47 | 38.25 | 35.17 |
| BP-PI | 36.57 | 25.72 | 23.62 | 33.51 | 31.64 |
| IPSO-BP-PI | 15.85 | 10.67 | 9.91 | 11.76 | 10.26 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Chen, M.; Kong, L.; Hu, Z.; Veerasamy, V. Regional Load Frequency Control of BP-PI Wind Power Generation Based on Particle Swarm Optimization. Energies 2023, 16, 2015. https://doi.org/10.3390/en16042015
Sun J, Chen M, Kong L, Hu Z, Veerasamy V. Regional Load Frequency Control of BP-PI Wind Power Generation Based on Particle Swarm Optimization. Energies. 2023; 16(4):2015. https://doi.org/10.3390/en16042015
Chicago/Turabian StyleSun, Jikai, Mingrui Chen, Linghe Kong, Zhijian Hu, and Veerapandiyan Veerasamy. 2023. "Regional Load Frequency Control of BP-PI Wind Power Generation Based on Particle Swarm Optimization" Energies 16, no. 4: 2015. https://doi.org/10.3390/en16042015
APA StyleSun, J., Chen, M., Kong, L., Hu, Z., & Veerasamy, V. (2023). Regional Load Frequency Control of BP-PI Wind Power Generation Based on Particle Swarm Optimization. Energies, 16(4), 2015. https://doi.org/10.3390/en16042015